Embed Size (px)
Citation preview

A NOVEL AUTOMATED OPTICAL TECHNIQUE TO DETERMINE
THE ORIENTATION OF BIAXIAL MINERALS IN A THIN SECTION
A Thesis
Presented to
The Honors Tutorial College
Ohio University
In Partial Fulfillment
of the Requirements for Graduation
from the Honors Tutorial College
with the degree of
Bachelor of Science in Engineering Physics
by
Shawn Patrick Hurley
June 2005

ii
This thesis has been approved by
The Honors Tutorial College and the Department of Physics and Astronomy
______________________________
Dr. Larry Wilen
Professor, Physics and Astronomy
______________________________
Dr. David Ingram
Professor, Physics and Astronomy
______________________________
Dr. Ann Fidler
Dean, Honors Tutorial College

iii
ACKNOWLEDGEMENTS
I would like to thank my advisor, Ohio University (OU) Physics and
Astronomy professor Dr. Larry Wilen, for presenting me with the initial idea for this
thesis. Without his guidance I wouldn’t have been able to develop it into what it is
today. Much of the conversation I have had with him has spurred my own creativity
and allowed me to think independently. Above all, Dr. Wilen enabled me to be
intimately and responsibly involved in research, which has been the most exciting and
irreplaceable portion of my education.
Funding for this project was provided by the National Science Foundation
Office of Polar Programs.
I would like to thank two of Dr. Wilen’s previous researchers, Nathan and Dirk
Hanson, both of whom created computer programs I examined to guide my own
programming. I also would like to thank Phil Skemer and Zhenting Jiang at Yale
University Department of Geology and Geophysics for providing the olivine sample
and scanning electron microscope data used in this thesis. Furthermore, I thank Roger
Smith and Randy Mulford at the machine shop at Clippinger Laboratory for all of their
assistance.
I thank Carlos Di Prinzio, a post doctoral researcher at Ohio University, for his
friendship and company in a windowless Clippinger lab. I have gotten to know Carlos
very well and I appreciate him sharing both his enthusiastic school spirit and his
coffee with me! I also thank him for allowing me to accompany him in traveling to
the 2003 American Geophysical Union Meeting in San Francisco, CA.

iv
I would like to thank all the faculty and administration at the Honors Tutorial
College (HTC). I also thank my director of studies in HTC, OU Physics and
Astronomy professor Dr. David Ingram, for his advice and support.
I would also like to thank all my friends for encouraging me to succeed. I
especially thank my dear friend Tracey Hanna for reviewing my work and showing
her love and understanding.
Finally, I thank my parents for the love and encouragement I received from
them since birth. They truly are my biggest fans.

v
Table of Contents
Title..................................................................................................................................i Approval ....................................................................................................................... ii Acknowledgements ..................................................................................................... iii Table of Contents ..........................................................................................................v List of Tables and Figures...........................................................................................vi Abstract...................................................................................................................... viii
1.0 INTRODUCTION...................................................................................................1
2.0 BACKGROUND .....................................................................................................5 2.1 CRYSTALLOGRAPHY BACKGROUND.......................................................................5 2.2 OPTICS BACKGROUND..........................................................................................12 2.3 OPTICAL MINERALOGY........................................................................................18
3.0 EXPERIMENTAL METHODS ..........................................................................29 3.1 EXPERIMENTAL SYSTEM ......................................................................................29 3.2 DATA COLLECTION AND PRE-ANALYSIS..............................................................36 3.3 THEORETICAL ANALYSIS METHOD ......................................................................39 3.4 ANALYSIS PROCEDURE ........................................................................................49
4.0 RESULTS AND DISCUSSION ...........................................................................62
5.0 CONCLUSIONS AND APPLICATIONS TO FUTURE RESEARCH...........83
6.0 REFERENCES......................................................................................................85
APPENDIX A..............................................................................................................88
APPENDIX B ..............................................................................................................89
APPENDIX C..............................................................................................................92

vi
List of Tables and Figures Table 1. The crystal systems and their properties...........................................................7 Table 2. The nine sample orientations. .........................................................................33 Table 3. Memory usage statistics for floating point vs. two integer bytes. ..................60 Table 4. The Results .....................................................................................................67 Table 5. Index of refraction data for olivine and OPX. ................................................76 Table 6. Final optical parameters: a, b, and c used to analyze olivine and OPX..........81 Figure 1. Defining parameters of the unit cell. ...............................................................7 Figure 2. Illustration of the grain growth process...........................................................8 Figure 3. A photo of the olivine sample that was studied.............................................10 Figure 4. Color image of the olivine sample.................................................................11 Figure 5. The electromagnetic wave as depicted by Abramowitz. ...............................13 Figure 6. Photographic demonstration of Snell’s Law. ................................................14 Figure 7. Drawing that depicts refraction at the air-glass boundary.............................15 Figure 8. Drawing showing the electric field directions in polarized and unpolarized
light. ......................................................................................................................16 Figure 9. Crossed polarizers. ........................................................................................17 Figure 10. The isotropic indicatrix. Image by Nelson. .................................................20 Figure 11. The uniaxial indicatrix. Image by Nelson. ..................................................22 Figure 12. The uniaxial negative and positive indicatrix. Image by Nelson. ...............23 Figure 13. Different cross sections in a uniaxial indicatrix. Image by Nelson.............24 Figure 14. The biaxial indicatrix. Image adapted from Nelson. ...................................25 Figure 15. Different cross sections in a biaxial indicatrix. Image by Nelson...............26 Figure 16. The Euler angle rotations.............................................................................28 Figure 17. Drawing of experimental setup. ..................................................................30 Figure 18. Photo of experimental setup. .......................................................................30 Figure 19. Color images of the nine sample orientations. ............................................33 Figure 20. Image used to calibrate the center of sample rotation. ................................35 Figure 21. Extinction curve...........................................................................................38 Figure 22. Extinction angles and contrast.....................................................................39 Figure 23. Coordinate axes convention used in the experimental setup.......................40 Figure 24. Diagram explaining rotation convention used.............................................42 Figure 25. Cross sectional ellipse showing the theoretical extinction angle. ...............47 Figure 26. Graph of ( )xxf 2sin)( 2= . ..........................................................................51 Figure 27. Depiction of 3-D Euler angle space.............................................................54 Figure 28. File structure for the Simple Grid Method. .................................................58 Figure 29. Image showing each analyzed grain’s location. Pixel resolution = 640 x
480.........................................................................................................................65 Figure 30. Euler angle plot of data from the optical method. .......................................70

vii
Figure 31. Euler angle plot of data from both methods side-by-side. SEM data has been adjusted to compensate for a sample mounting difference. .........................71
Figure 32. R2 vs. all Euler angles for one grain. ...........................................................73 Figure 33. R2 vs. the Euler angles theta and psi for one grain......................................74 Figure 34. R2 vs. the Euler angles theta and psi for one grain......................................74 Figure 35. Relationship between the crystal axes and the indicatrix axes in olivine....77 Figure 36. Optic sign vs. composition for olivine. .......................................................79

viii
ABSTRACT
A new computer automated optical method to determine the orientation of
biaxial mineral grains in thin sections has been developed. The system takes images
of a thin section sample between rotating crossed polarizers. The intensity of light
transmitted through each grain is used to fit a curve yielding the angle of extinction.
The procedure is repeated for nine sample positions. To specify the orientation of a
grain by the Euler angles, phi, theta, and psi, the theoretical extinction angles
corresponding to a grid of possible grain orientations is calculated and matched with
the experimental extinction angles for the nine sample positions. For comparison, a
sample of the orthorhombic mineral Olivine was analyzed with a conventional
scanning electron microscope (SEM) method. The new optical method produces
results in good agreement with the SEM method for a fraction of the cost in equipment
and software.

1
1.0 INTRODUCTION
The study of the mineral composition of rocks is a common aspect of geology,
yielding insight into the structural evolution of the earth. An important component of
this research is the study of the individual crystal orientations of mineral crystals.
Geologists and geophysicists who study the transmission of seismic (earthquake)
waves are interested in determining how the orientation of minerals in the earth’s
upper mantle affects seismic wave transmission direction and rate of travel. These
minerals are anisotropic, meaning they exhibit physical properties that depend on
direction. Because of this fact, the orientation of the mineral crystals in the upper
mantle will have an effect on the propagation of earthquake waves. The collective
“preferred” orientation of these mineral crystals, called “texture” or “fabric,” is an
average orientation of all the crystal grains over a large area. Because of the
dependence of seismic propagation upon texture (“seismic anisotropy”),
measurements of the texture of rock samples is important for interpreting the
information derived from seismic wave analysis.
In addition to seismological studies, the texture of minerals provides important
clues into the deformation and formation of rocks and rock formation. An American
Geophysical Union VHS tape that discusses properties of the earth’s mantle goes into
detail about the significance of studying the texture of minerals, as quoted here from
their web site:
These findings are of significant interest for seismologists, geodynamicists and structural geologists

2
who recognize the importance of anisotropy. The link between the crystal properties and structural features of a geological formation is evident: anisotropy in the mechanical properties of rocks influences their deformations, and the deformations themselves induce the texture that is the source of anisotropy in the properties (Wenk).
The mineral olivine is the most abundant mineral in the earth’s upper mantle.
Understanding what causes texture to develop in rocks in general and specifically in
olivine is an important area of research. Karato describes how the process of
dislocation deformation reorients olivine crystals, “...the shape of a crystal can change
only in a certain manner. Thus, by rotating its orientation, a crystal tries to match the
boundary condition imposed by its surrounding materials” (109). He also adds,
“Simply put, crystals tend to align to match the microscopic deformation by
dislocation motion with the imposed macroscopic deformation geometry” (109-110).
Therefore, anisotropy is sometimes influenced by the deformation processes in the
mantle. Olivine has the strongest elastic anisotropy, so its texture has the largest effect
on the anisotropic structure of the upper mantle (Karato 110). This makes the study of
the texture of olivine important to researchers investigating seismic waves as well.
A prime example of one scientist’s study of seismic anisotropy is Dr. Furlong
at Penn State University who researched the mantle under Tibet. Dr. Furlong’s
research, as documented on a Penn State web site, aimed to study “the role of plate
tectonics in the evolution of continents.” His research looked at the recordings of
seismic events in one region of Tibet and he found a systematic pattern of mantle
deformation. Dr. Furlong further stated, “Theoretically, the olivine fabric should

3
relate to the forces that existed during collision and the actual deformation of the
mantle rock.” He says that better models of continental collisions can be made once
more is known about the deformations in the mantle (Furlong).
Because of the importance of studying the deformation processes in the
mantle, it becomes necessary to design experimental techniques for determining the
texture of olivine and other biaxial minerals. One tool already available for studying
texture is the scanning electron microscope (SEM). This proven method finds the
orientations of the grains in a polycrystalline olivine sample by using electron
backscattering. However, there is a need for a less expensive, yet still reliable
technique to find the orientation of biaxial minerals. Although manual optical
techniques exist for this type of analysis, they are typically laborious and time
consuming to perform (Wilen). Therefore, this thesis introduces an automated optical
method to satisfy the need. My research verified the validity of the optical method by
obtaining the orientations of grains in a sample of olivine. The accuracy of the optical
method was verified by a direct comparison of the data with results obtained using a
SEM.
The optical technique has its advantages over the SEM method. The optical
method can be setup for 1/100th the cost of a SEM. Also, the new optical method uses
images of the grains taken with cross polarized visible light. These images show sharp
contrast along grain boundaries due to differing orientations between grains. This
enables the researcher that uses the optical method to calculate statistics concerning
grain size, deformation, and nearest neighbor correlations using existing software.

4
The SEM method is not as well suited to see individual grain boundaries, which limits
the automation of such additional analyses (Wilen).
Over the next several chapters, I will describe the details of the optical
technique I developed. To the best of my knowledge, this is a unique method because
it uses polarized light to the find the orientation of biaxial crystal grains in a mineral
thin section.

5
2.0 BACKGROUND
2.1 Crystallography Background
“A crystal is a solid body bounded by natural planar surfaces, generally called
crystal faces, that are the external expression of a regular internal arrangement of its
constituent atoms or ions” (Berry 10). Designing experiments involving biaxial
crystals requires an understanding of the basics of crystallography, optics, and optical
mineralogy. I will use Berry’s definition of the crystal as a starting point in this
chapter, which is dedicated to introducing those principles necessary to understand my
research.
Crystallography is the study of the characteristics and evolution of rocks as
well as the internal structure of all crystalline substances. Crystalline substances are
those materials that have a regular three dimensional arrangement of constituent
atoms, where each atom is bonded to its nearest-neighbor, but may or may not be
bounded by crystal faces. Therefore, minerals are crystalline solids by definition
(Berry 10-12, Callister 32).
Crystallography is a practically important area of study. This is because
crystal structure, along with chemical composition, determines all the physical
properties of crystalline materials. These, in turn, determine the uses of crystalline
materials (Berry 14).

6
Crystal Systems
All minerals are classified into crystal systems according to their crystal
structure. Crystal structure is “the manner in which atoms, ions, or molecules are
spatially arranged” (Callister 32). Each crystal system is based upon the symmetry of
the smallest repeatable arrangement of atoms in the crystal structure, called the unit
cell. The unit cell is the basic building block defining the crystal structure through its
geometry and the position of the atoms within it. Each crystal system’s unit cell is
modeled by a unique crystal lattice, a “three-dimensional array of points coinciding
with atom positions” (Callister 33).
The specific geometry of each crystal system is defined using an x, y, and z
coordinate system (not necessarily orthonormal) such that the origin is situated in the
corner of the unit cell and each axis coincides with one of the edges of the unit cell
extending from this corner. Each crystal system is defined by 6 lattice parameters,
which are a, b, c, α, β, and γ. The parameters a, b and c are the lengths of the edges
along the x, y, and z axes respectively, where α, β, and γ are the interaxial angles as
shown in Figure 1 below adapted from Callister (39).

7
Figure 1. Defining parameters of the unit cell.
Table 1 lists the seven possible crystal systems and some characteristics
associated with each, which will be explained later.
Table 1. The crystal systems and their properties. Crystal System Axial
Relationships Interaxial Angles Effect on
Light Optical
Classification Indicatrix
Shape Isometric (Cubic) a = b = c o90=== γβα Isotropic Isotropic Sphere
Hexagonal a = b ≠ c
o
o
120
,90
=
==
γ
βα
Anisotropic Uniaxial Spheroid
Tetragonal a = b ≠ c o90=== γβα Anisotropic Uniaxial Spheroid
Rhombohedral a = b = c o90≠== γβα Anisotropic Uniaxial Spheroid
Orthorhomic a ≠ b ≠ c o90=== γβα Anisotropic Biaxial Ellipsoid
Monoclinic a ≠ b ≠ c βγα ≠== o90 Anisotropic Biaxial Ellipsoid
Triclinic a ≠ b ≠ c o90≠≠≠ γβα Anisotropic Biaxial Ellipsoid
Adapted from Callister (40). More than 50% of minerals exist in the orthorhombic and monoclinic systems. This is
because the most abundant elements in the earth’s crust: silicon (Si), oxygen (O),
magnesium (Mg), iron (Fe), aluminum (Al), and calcium (Ca) usually form
compounds in those crystal systems (Sen 39). For example, the orthorhombic mineral
z
a
b
c y
x
α β γ

8
olivine consists of two iron or magnesium atoms bonded to a silicate compound of a
silicon atom and four oxygen atoms.
Polycrystalline Thin Section The experimental setup for this research utilizes polished thin sections. The
thin sections that are typically studied are made from natural polycrystalline rock
samples. This means the crystalline solid is composed of many small crystal grains,
each with their own specific crystallographic orientation within the sample. The grain
growth process begins with the solidification of small crystals, which are typically
randomly oriented. As they grow to completion, irregular grain shapes form from the
atomic mismatch at grain boundaries. Sometimes there develops a preferred
crystallographic direction, meaning a tendency for crystals to align their orientations
in one direction. The case of preferred orientation among crystal grains is called
texture (Callister 54-56).
A diagram demonstrating the grain growth process as adapted from Callister
(55) is depicted in Figure 2, below.
Figure 2. Illustration of the grain growth process.

9
It is important to note that the grains themselves are three dimensional, unlike the two
dimensional depiction above. The thin section, however, gives the researcher a two
dimensional cross section of the grains in the sample.
I now will briefly describe how a thin section is typically prepared using five
main steps. First, the sample is cut using a diamond saw. Then, the sample is
mounted on the glass slide. Then, the surface is ground flat by using a carborundum
grit and water until the section is ~30 µm thick. The thickness is estimated by
comparing the observed colors of the grains to the colors expected from minerals in
the section. Then the surface is polished, usually with diamond grit plus oil as a
lubricant. Finally, the surface is buffed by using a gamma alumina powder and water
for lubrication (Gribble 32-33).
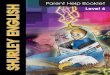
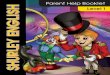
The two images shown in Figure 3 and Figure 4 are of the thin section of
olivine that was used in the experiment. The first is a photo of olivine mounted in the
sample stage of the system. Note how it looks in ordinary unpolarized light (the
principle of polarization will be described later). The second image is of olivine seen
between crossed polarizers through the camera of the experimental setup. Although
the camera is black and white, the color image was created by combining 3 images
taken under red, green and blue filtered light.

10
Olivine Sample
Figure 3. A photo of the olivine sample that was studied.

11
Figure 4. Color image of the olivine sample.
1 mm

12
2.2 Optics Background
The study of the behavior of light is called optics. I used optical procedures
and principles to guide the design of the experimental setup and analysis. In order to
explain the apparatus used in data collection and the theory behind the data analysis, it
is necessary to describe the most relevant concepts in optics and how they pertain to
this experiment.
Light as an Electromagnetic Wave In the context of the experiment, I will treat light classically as a form of
electromagnetic radiation which can be described by the propagation of a wave
carrying the energy of the radiation. This radiation is a wave that consists of two
perpendicular components, the electric field vector ( Er
) and the magnetic field vector
( Br
). The Er
and Br
vibrate in a sinusoidal manner perpendicular to the direction the
wave propagates (Figure 5Figure 5. The electromagnetic wave as depicted by
Abramowitz). This defines light as a transverse wave, because the fields vibrate
perpendicular to the direction of travel. Ultimately, it is the interaction of the electric
field component of light with the electrically sensitive atoms in the crystal lattice of a
mineral that affects the behavior of light (Nesse 1). It is this basic phenomenon that
makes the experiment possible.

13
Figure 5. The electromagnetic wave as depicted by Abramowitz.
Electromagnetic radiation is characterized by its wavelength as shown in
Figure 5. The wavelength is the distance between successive peaks or crests of the
wave and for visible light it is best measured in nanometers. The frequency of light
describes the number of sinusoidal cycles of the wave that pass a point in space per
second and is measured in Hertz (Hz). Wavelength and frequency are characteristics
that are directly connected by the velocity of the wave. The speed of light, c,
illustrates this relationship as:
fc λ= (1) where lambda is the wavelength and f is the frequency. This relationship describing
the velocity of waves was derived by Newton in the year 1687 (Hecht 16).
So far, I have described the characteristics of light using a picture of single
wave. In practice, light can be depicted as a multitude of waves traveling as a single
unit. The wave front is defined as the plane connecting similar portions of the waves,
such as the crests. The wave normal is a vector that is perpendicular to the wave front
and it points in the direction the wave front is traveling (Nesse 3).

14
Refraction, Index of Refraction, and Snell’s Law As light encounters a boundary between two media it will become reflected,
refracted, or absorbed in some combination: such as partially, selectively, or totally.
Light will always reflect at an angle equal to the angle of incidence, due to the law of
reflection. In addition, if light transmits into another medium, it will undergo
refraction. Refraction is a “bending” of the light ray that occurs because the light
changes its speed. The change in speed causes the ray to change direction at the
boundary between the media (Sen 70). A familiar example of refraction is the pencil
sitting in a glass of water, as seen in Figure 6.
Figure 6. Photographic demonstration of Snell’s Law.
The speed of light in a vacuum, c, is a constant value of approximately 3 x 108
m/s. The refractive index, n, is defined as the ratio of the speed of light in vacuum to
the speed in the medium:
vcn = (2)

15
The refractive index is also simply related to the change in direction that occurs at the
boundary in conjunction with the angle of incidence and the angle of transmittance.
This relationship is known as Snell’s Law, named after its discoverer:
ttniin θθ sinsin = (3)
The refractive index of air can be taken to be approximately 1.00 and many common
minerals have values that range from 1.43 to 3.22 (Shelley 21-22).
Figure 7 is a pictorial demonstration of reflection and refraction with all the
components of the equation for Snell’s Law labeled.
Figure 7. Drawing that depicts refraction at the air-glass boundary.
Polarization Using the model of the electromagnetic wave previously described, I will
explain the nature of polarized light. I am limiting the discussion to only include
linearly polarized light since that is the only type of polarized light relevant to the
experiment. As an example, sunlight is naturally unpolarized, meaning the electric
θt
air ni
glass nt
θi θi

16
field component is randomly oriented in any direction perpendicular to the direction of
propagation. Linearly polarized light has only a single direction in which the electric
field vibrates, (Figure 8).
Ordinary Unpolarized Light Plane Polarized Light
Figure 8. Drawing showing the electric field directions in polarized and unpolarized light. A polarizer is a substance used to create polarized light from unpolarized light.
My experiments use a very common type of polarizer composed of a stretched film of
polyvinyl alcohol impregnated with iodine. This type of polarizer is called Polaroid
and was invented by Edwin Herbert Land (Hecht 335). Polaroid works through
selective absorption, thereby only transmitting light whose electric field is vibrating in
the preferred direction (called the transmission axis).
Another common process to produce linearly polarized light is reflection. At a
special angle of incidence, Brewster’s angle, only the electric field component
polarized parallel to the surface will be reflected. This angle is related to refractive
indices by Brewster’s Law:
i
tp n
n=θtan (4)
Er
Propagation Direction
Er
Propagation Direction

17
named after Sir David Brewster (1781-1868) (Hecht 348). This principle creates a
polarized glare from reflecting surfaces, which can be preferentially reduced by
Polaroid sunglasses. I use Brewster’s Law to calibrate the transmission axis of the
polarizer for the experiment and this procedure is described in detail in the
experimental methods section.
Cross Polarized Light When two linear polarizers are superimposed on each other, as shown in
Figure 9, such that their transmission axes are perpendicular, they are considered to be
crossed. If no polarizing material exists between them, then extinction occurs and no
light will be able to pass through. Therefore, the two crossed polarizers in Figure 9
would appear extinct (black) to the observer in the overlapping region and show some
lowered intensity otherwise (Shelley 20).
Figure 9. Crossed polarizers.
When a mineral sample is placed between crossed polarizers it is said to be
viewed under cross polarized light. The appearance of the mineral depends upon its
crystal symmetry and orientation. A useful theoretical tool called the optical indicatrix

18
describes the way light acts within a given material. Understanding the indicatrix and
how it relates to the experiment was a critical step in my thesis.
2.3 Optical Mineralogy The Optical Indicatrix According to Nesse, the optical indicatrix is “a geometric figure that shows the
index of refraction and vibration direction for light passing in any direction though a
material” (34). It is constructed by drawing vectors whose lengths are proportional to
the index of refraction of light that is vibrating parallel to the vector (Nesse 35). In
general, this geometrical representation is an ellipsoid. The indicatrix is the
theoretical foundation upon which the experimental procedures and calculations of
this experiment are based.
Once the indicatrix is constructed and aligned with the material, it completely
determines how light will behave when incident upon any transparent material
according to the following rules:
1. A plane perpendicular to a ray of light traveling in an arbitrary direction will
intersect the indicatrix ellipsoid (through its center) in an ellipse. The light ray
then splits into 2 rays, one with a polarization aligned parallel to the semi-
major axis of the cross sectional ellipse and the other with a polarization
aligned parallel to the semi-minor axis of the cross sectional ellipse.
2. The ray polarized along the semi-major ellipse axis travels with a velocity of
1nc , where 1n is the length of the semi-major axis. The ray polarized along the

19
semi-minor ellipse axis travels with a velocity of 2n
c , where 2n is the length of
the semi-major axis.
3. Because the two light rays have different indices of refraction, if the light ray is
incident on the material with an angle ≠ 0, then the two rays will physically
split.
4. If the intersection of the indicatrix is a circle, then the polarization of the
incident light is not affected. The direction normal to the circular section in the
indicatrix is called the optic axis.
5. The difference between the maximum and minimum indices of refraction used
to construct the indicatrix define the birefringence of the material.
6. If light incident on the material is already polarized along the direction of the
semi-major or semi-minor axes of the ellipse, then its polarization is unaffected
by the material.
I compiled these rules from the Neese (35), Hecht (336-337), and Shelley (21-23).
According to Table 1, there are three types of optical classifications in minerals and
each one has a different indicatrix geometry. These are based upon the crystal
structure of the atoms, as defined and classified by the crystal system to which the
mineral belongs. The indicatrix makes a progression of increasing complexity from
isotropic to uniaxial to biaxial. Therefore, I will introduce each specific indicatrix in
this order to further aid the understanding of its role in optical mineralogy and the
theoretical framework of this experiment.

20
Isotropic Minerals The light passing through an isotropic mineral of any random orientation will
have the same velocity. On an atomic scale, this is due to a highly symmetric atomic
arrangement, only possible in the isometric (cubic) crystal structure. Other non-
crystalline materials that are isotropic include gases, liquids, and glasses (Nesse 34).
Because the velocity remains constant for all directions, the index of refraction also
remains constant in all directions. Therefore, the isotropic indicatrix is the simplest
indicatrix, a sphere (Figure 10).
Figure 10. The isotropic indicatrix. Image by Nelson.
In the example in Figure 10, the index of refraction is 1.540 for all crystal orientations
because the intersection with the indicatrix is always a circle. Also, the polarization
state of light is not affected, so when any isotropic mineral is viewed between crossed
polarizers, it will appear extinct (Nesse 34-35).
Optic Axis
As previously defined, the optic axis is the direction through any crystal where
the intersection with the indicatrix is a circle. This means that rays entering parallel to

21
the optic axis will not incur double refraction (being split into two rays) or have their
polarization state altered. Therefore, a crystal viewed along its optic axis between
crossed polarizers will show extinction for all rotations of the polarizers, as long as the
polarizers remain crossed. For isotropic minerals, every direction in the crystal is an
optic axis (Nesse 53).
Uniaxial Minerals
The description of uniaxial minerals will begin with a historical introduction to
double refraction. Anisotropic minerals were observed empirically to refract light
with two different indices of refraction. One such mineral, calcite, is commonly used
to illustrate the phenomenon of double refraction. If a calcite rhomb is placed over a
black dot on a piece of paper, then two images of the dot are observed. When the
calcite is rotated, one dot stays fixed while the other dot rotates with the crystal. The
image of the stationary dot behaves as would be expected from an isotropic mineral,
which is according to Snell’s Law, so therefore it was termed the ordinary ray (ω).
Because the image of the rotating dot behaves so differently and does not appear to
obey Snell’s Law, it was called the extraordinary ray (ε) (Nesse 53).
Minerals in the hexagonal and tetragonal crystal systems have only one optic
axis and are called uniaxial minerals. In uniaxial minerals, the relationship between
the indicatrix and the crystallographic axes is such that the optic axis in the indicatrix
and the c crystallographic axis (c-axis) coincide. This makes the indicatrix very useful
in relating the optical and physical properties of uniaxial minerals. Figure 11 is a
representation of the uniaxial indicatrix.

22
Figure 11. The uniaxial indicatrix. Image by Nelson.
As previously defined, the birefringence, δ, is a measure of the difference
between the (higher) index of refraction of the slow ray and the (lower) index of
refraction of the fast ray. Because changing the orientation of an anisotropic crystal
usually changes the birefringence, it is commonly listed as the maximum value for a
given mineral (Nesse 40).
In uniaxial minerals, the ω ray has a fixed index of refraction, whereas the
ε ray’s index of refraction can vary according to the orientation of the mineral.
Because it must always be higher or lower than the index of the ω ray within the same
mineral, uniaxial minerals are classified as optically positive or negative. In positive
minerals, the ε ray is slower because its index of refraction is higher. In negative
minerals, the ε ray is faster because its index of refraction is lower (Nesse 53). Figure
12 shows both classifications of uniaxial minerals (remember that for uniaxial
minerals, the optic axis is the same as the c-axis).

23
Figure 12. The uniaxial negative and positive indicatrix. Image by Nelson.
In addition to having different indices of refraction, the ω ray and ε ray were
shown to be polarized at right angles to each other by Fresnel and Arago in the year
1811 consistent with rule number 1. The ω ray always vibrates in a plane at right
angles to the ω ray path and the c-axis of the mineral. The ε ray always vibrates
within this plane containing the c-axis (Bloss 71).
Three intersections of the uniaxial indicatrix are shown in Figure 13. A section
containing the optic axis is called a principal section and light transmitting through at
this orientation will show maximum birefringence. The permitted vibration directions
are aligned with the semi-major and semi-minor axes of the principal section ellipse.
Light propagating parallel to the c-axis will make a circular section in the indicatrix.
In this situation, the mineral will behave as though it were traveling in an isotropic
mineral because there is zero birefringence. For light propagating in a random
direction, the section will be elliptical and again the permitted vibration directions are
aligned with the semi-major and semi-minor axes of the cross sectional ellipse (Neese
56).

24
Figure 13. Different cross sections in a uniaxial indicatrix. Image by Nelson.
Biaxial Minerals
Biaxial minerals have two optic axes and are classified in the orthorhombic,
monoclinic, and triclinic crystal systems. Biaxial crystals have the least symmetry
since they vary in crystal structure and chemical bonding in all directions. Therefore,
the relationship between the indicatrix axes and the crystallographic axes varies from
mineral to mineral. However, if this relationship is known it makes the indicatrix very
useful in relating the optical and physical properties of biaxial minerals. Figure 14 is a
representation of the biaxial indicatrix.

25
Figure 14. The biaxial indicatrix. Image adapted from Nelson.
As shown in Figure 14, three principal indices of refraction are needed to
construct the indicatrix. These values are α, β, and γ, which are not related or to be
confused with the interaxial angles in crystallography. (From now on in this text,
α, β, and γ, will refer to the indices of refraction in biaxial minerals). These indices of
refraction are defined such that γ > β > α is always true (Nesse 76-77).
The defining features of the biaxial indicatrix are depicted in Figure 15. The
biaxial indicatrix has two circular sections as depicted in Figure 15. The two lines
perpendicular to one or the other circular sections are the optic axes. The angle that
separates the two optic axes is called 2Vα or 2Vγ according to which principal
refractive index bisects it. 2Vα + 2Vγ = 180°, so unless both angles are 90° they will
not be equal. It is interesting to note, in the limits that either 2V angle becomes 0° or
180°, the two circular sections and optic axes converge into one and β = α or β = γ.
Therefore, a uniaxial crystal can be thought of as a special case of the biaxial crystal
(Nesse 76-78).

26
Figure 15. Different cross sections in a biaxial indicatrix. Image by Nelson.
As in uniaxial minerals, the permitted vibration directions in a biaxial crystal
are aligned with the semi-major and semi-minor axes of the elliptical cross section
from the incident wavefront. Light propagating parallel to either optic axis will
“slice” through a circular section in the indicatrix and will behave as though it were
traveling in an isotropic mineral because there is zero birefringence. To avoid
confusion, light in a biaxial mineral is still split into two rays despite needing three
indices of refraction to construct the indicatrix. Of these two rays, one is the fast ray
and one is the slow ray; however, both of these rays are now extraordinary. Biaxial
minerals are also classified as either biaxial positive or biaxial negative. An optically
positive mineral means that 2Vγ < 90° and an optically negative mineral means that
2Vγ > 90°. If the 2Vγ = 180°, then the mineral is optically neutral (Nesse 76-78).
Extinction
Throughout the course of this paper, the term extinction is used to mean that no
light is transmitted when observing a mineral under cross polarized light. Consider a

27
mineral sample observed between crossed polarizers that are rotated through 360
degrees. When an isotropic mineral is viewed in this manner, it will always be extinct.
As discussed above, the polarization state of the light wave is unaltered by the
mineral, regardless of the mineral’s orientation. So, the light is polarized by the first
polarizer and extinguished by the second (perpendicular to first) polarizer. If the
mineral viewed is anisotropic, it will generally show extinction four times as the
polarizers are rotated 360 degrees. The angles at which this extinction occurs are
called the extinction angles and they are spaced ninety degrees apart. The extinction
occurs because each of these four positions correspond to an alignment of the
transmission axis of the polarizer and the characteristic polarization of one of the light
rays transmitted through the mineral (Shelley 23).
A geometric condition for extinction is established if one knows the orientation
of the indicatrix with respect to the light propagation direction. The angle of
extinction can be determined by constructing the ellipse of intersection between the
indicatrix and the plane perpendicular to the propagation direction. If the incident
light is polarized parallel to the semi-major and semi-minor axes of this ellipse, it will
propagate with no change in polarization. Therefore, if the crystal is viewed between
crossed polarizers it will appear extinct if either of the polarizers is aligned with either
ellipse axis (Wilen).
The Orientation of Biaxial Minerals The orientation of biaxial minerals is commonly specified using three angles of
rotation. In my experiment, the three angles used are the Euler orientation angles, phi

28
(φ), theta (θ), and psi (ψ). These angles of rotation are expressed explicitly as rotation
matrices in the section of this paper that outlines the theoretical method. For
simplicity, they are visually depicted in Figure 16.
Figure 16. The Euler angle rotations.
I adopted the Euler angle convention described in a classical dynamics
textbook (Marion 431-433) because it was convenient to express the orientation in the
same three Euler angles as the data obtained from other methods, such as the SEM at
Yale University. This later facilitated a direct comparison of the two methods of
finding the orientation of biaxial minerals, which is detailed in the results section of
this paper.
φ
y
θ
ψ x
z z”
x’

29
3.0 EXPERIMENTAL METHODS
3.1 Experimental System The experimental system for taking images of crystals under thin section was
designed by Dr. Larry Wilen. During data collection and analysis, the system was
kept at Clippinger Laboratory, room 169, where I used it to collect data for my thesis.
My work on the system included writing a software program to collect data and
performing a system calibration. In this section, I will describe the parts of the system
and their functions, define the sample orientation, and explain some of the calibration
procedures.
Components The system consists of the following components mounted on an optical
bench: (A) a black and white CCD (charge coupled device) video camera, (B) a
microscope lens assembly with adjustable zoom and focus, (C) two crossed linear
polarizers mounted on rotation stages, (D) a sample rotation stage, (E) the table
rotation stage, and (F) a diffuse white light source. The system also includes a stage
controller unit and a lab computer (DELL Optiplex GX240, Pentium 4 - 1.7Ghz,
1024MB of RAM) equipped with a video capture card and a computer program that
automates the data collection procedure. Figure 17 is a drawing showing each part’s
location on the optical bench and Figure 18 is a photo of the experimental setup.

30
Figure 17. Drawing of experimental setup.
Figure 18. Photo of experimental setup.

31
I will now explain the details of each part in the system. Light from a white
light source is used to image the crystals. It travels through the first polarizer, then
through the sample, then through the second polarizer, and finally into the camera.
The light source has an adjustable intensity to obtain maximum contrast in the image.
If the intensity is too high, the sample washes out and some light bleeds across grain
boundaries. If the intensity is too low, there will not be enough contrast. This in turn
may cause errors in the experimental extinction angle.
Each of the two polarizers is set in a rotation stage. The stages are set to rotate
in the same direction. The first polarizer, between the light source and the sample, is
set with its transmission axis horizontal and the second polarizer, between the sample
and the camera, is set with its transmission axis vertical. When the sample is not
present in the system, no light will reach the camera because the polarizers are
crossed.
The system is used to image crystal samples in thin sections. Because the
sample is so thin (~30 µm), it is possible to consider the crystal section as a 2-D
sample. There are two rotation stages that control the sample’s position. The table
stage is mounted horizontally so its rotation is akin to a record player. In other words
the rotation occurs in the x-z plane and its rotation angle is called ξ (xi). Mounted on
the table stage is the sample rotation stage. Its rotation is in the x-y plane and its angle
is called φinner (phi inner). The origin of the coordinate system is at the intersection of
the axes of rotation of the sample and table stages. In the home position, both the
table stage and the sample stage are set to zero degrees. This puts the sample stage in

32
a plane parallel to the two polarizers, meaning its axis of rotation is co-linear with the
axis of rotation of the two polarizer stages.
The black and white CCD camera is used to view the sample. It has an
adjustable zoom and focus. These must be adjusted by hand and are set according to
the needs of the experiment. The camera is secured to the optical bench with the axis
of the optical lens system aligned with the axes of rotation of the two polarization
stages. Also, the center of the camera image is aligned with the center of rotation of
the sample as best as possible. Although the camera feeds video to the computer, I use
single image samples of that feed, also known as snapping an image. The image
resolution is 640 by 480 pixels in 8-bit black and white. This gives 256 levels of
intensity. However, during sample installation and testing, it is helpful to watch the
live video feed to be able to make adjusting the image easier and faster.
There is a cover placed over the system to prevent ambient light from spoiling
the images and to protect against excessive dust buildup. A servo controller by
Newport, model MM3000, is used to move the stages with a one thousandth of a
degree precision. The controller can be used to move the stages manually via the front
panel controls, but it is interfaced to a computer via a serial connection to be run
autonomously.
Sample Orientation
There are a total of nine sample orientation sequences, indexed by n. A
sequence of images is taken at each sample orientation. Each sequence is denoted in
the form ξsφinner, or (xi) s (phi inner), where the letter “s” separates the two sample

33
orientation angles in degrees. Table 2 shows the nine sequences used. Figure 19
shows the color images of the 9 sample orientations.
Table 2. The nine sample orientations. n Sequence Xi Phi Inner 1 0s0 0 02 45s0 45 03 45s45 45 454 45s90 45 905 45s135 45 1356 45s180 45 1807 45s225 45 2258 45s270 45 2709 45s315 45 315
Figure 19. Color images of the nine sample orientations.

34
Calibration As with any experimental system, some calibration procedures must be made
to evaluate the consistency and correctness of the data. In this system, the first
polarizer has its transmission axis aligned horizontally by using the principle of
Brewster’s Law, which I described earlier. The procedure involves a laser, a glass
slide, an adjustable linear polarizer, a mirror, a photodetector, and a voltmeter. The
parts are setup on another optical bench in the lab. Brewster’s Law enables me to
polarizer the laser light horizontally using the glass slide. The polarized laser then
shines through the polarizer to be calibrated, is reflected off the mirror, and is detected
by the photodetector. This is hooked up to a voltmeter which displays a voltage
corresponding to the light intensity it detects. With the room lights off, I iterated small
adjustments of the polarizer and the incident angle on the glass slide. When
Brewster’s angle is reached at the glass slide, the light will be completely polarized
horizontally. The laser beam can be extinguished by setting the adjustable polarizer to
transmit vertically. (The mirror is used to keep the laser beam aimed directly into the
photodetector since it would become misaligned as the incident angle on the glass
slide changes).
The next step is to place this vertically calibrated polarizer into the system with
no sample present. Once it is installed into the system, a computer program rotates the
two polarizers of the experimental system independently until maximum transmission
intensity is achieved. Then they are all aligned vertically. Now polarizer #1 is rotated
until the light intensity is as close to zero as possible. This will set polarizer #1 to be

35
transmitting horizontally (parallel to the x-axis of the lab reference frame). Then I
remove the calibrated polarizer I just added and make sure the second (system)
polarizer crosses with the first, meaning it is aligned vertically.
The pre-analysis routine, to be described later, needs the location in the image
(pixel coordinates) of the center of rotation of the stage corresponding to φinner. After
camera and polarizer alignment adjustments are complete, but before taking data, a
calibration must be made to determine this center of rotation. First, an opaque disc
with a centered pin hole is placed in the sample stage and the polarizers are uncrossed
by rotating the second polarizer to horizontal. Then, φinner is rotated through 360
degrees while many images of the pin spot are taken. One image is created by
summing the individual images and the centroid of the spot of light in the image is
found. The pixel location of this centroid is used as the center of rotation for all
calculations done in the pre-analysis routine. Figure 20 is one such image taken on
July 3, 2003.
Figure 20. Image used to calibrate the center of sample rotation.

36
Image pixels are indexed with the origin (0, 0) located in the upper left hand corner.
The x pixel location increases left to right from 0 to 639 and the y pixel location
increases from top to bottom 0 to 479. The center of the image is therefore (319.5,
239.5). For the image above, the center of rotation is calculated to be at x = 340.65
and y = 250.88. The major difference between the center of the image and the actual
center of rotation demonstrates the importance of this calibration.
3.2 Data Collection and Pre-Analysis During experimental data collection, the images from all nine sample
orientations are compiled. I have written a computer program in Labview to automate
steps 4 through 8 in the data collection procedure. The steps are as follows:
1. Remove the protective cover and install a sample into the sample stage. 2. Adjust the focus, zoom, and light intensity if necessary while monitoring the
camera’s view. 3. Replace the protective cover. 4. Set the sample to the home position, 0s0. 5. Rotate the polarizers through 95 degrees in 5 degree increments. An image is
taken at each step, which is an average of 5 video frames. These are grouped and saved as one file consisting of all 20 images.
6. Rotate the sample to the next orientation. 7. Repeat steps 5 and 6 until all 9 sequences are finished. 8. Return the sample and the polarizers to the home position.
Once a sample is in place it takes about twenty minutes for an entire data set to be
taken. A data file is saved for each sequence in a folder named: “(time of data
collection) (name of sample)” which is saved in a folder named: “(date of data
collection)” within the main directory “C:\Geo Data”. In this manner, different runs of

37
the same sample are separated by the date and time. Here is an example of the
directory structure of one of the data folders for olivine:
“C:\Geo Data\2003-11-04-Tue\12.38 Olivine MG”.
Pre-Analysis
The pre-analysis routine is an existing algorithm that is used for the uniaxial
analysis of ice crystals. It was developed and programmed by Dirk Hansen and Larry
Wilen. I have kept this routine essentially intact, implementing only a few
modifications for faster processing. The pre-analysis routine calculates the nine
experimental extinction angles, nexpε , of each grain being tested in a sample. The
procedure to find the nexpε completes the following steps: The intensity of a three by
three region of pixels in the center of the grain is averaged for each image in a
sequence. This intensity is a number from 0 to 255, because the image has 8-bit
grayscale resolution. The 20 data points from a given sequence are used to plot a
curve of intensity vs. polarization angle (with respect to the x-axis). An analytic
function is fit to these data points. The polarizer angle corresponding to the minimum
of this function is the experimental extinction angle, nexpε . The process is repeated for
each of the sequences n = 1 to 9 (and for each grain specified). At the end of pre-
analysis, the results are saved in a file within a folder named after the date and time
the results were calculated. This folder is placed is a directory within “C:\Geo
Results” that includes folders for each set of data analyzed. This organizes the results
first by the data it analyzed and then by the time it was analyzed. Here is an example

38
of the directory structure of one of the results folders for olivine: “C:\Geo
Results\2003-11-04-Tue\12.38 Olivine MG\2005-04-06-Wed, 16.45”.
The pre-analysis routine must be able to determine each grain’s position in the
image after the sample changes orientation. The software uses a mapping algorithm to
ensure it continues to analyze the same three by three region of pixels in the specified
grain. One critical parameter for this mapping algorithm is the center of rotation of
the sample stage, which was determined during the calibration procedure previously
described.
The following images show an example of the pre-analysis results from an
actual olivine grain that was analyzed. The first image, Figure 21, depicts the
extinction curve for the 0s0 sequence. The data points are graphed in white and the
fitted curve is graphed in green. It produces a reliable extinction angle of 30.8
degrees. Note that it has a high contrast, which is the maximum intensity minus the
minimum intensity of the grain.
Figure 21. Extinction curve.
The extinction angles and contrast for each sequence for one particular grain are
indicated in Figure 22.

39
Figure 22. Extinction angles and contrast.
Sequences with contrast lower than 45 may lead to some error in the extinction angle
that is calculated from the fit. Therefore, there is an option to exclude those extinction
angles from the full analysis.
3.3 Theoretical Analysis Method
After the images of a sample have been taken and each grain’s nine extinction
angles are determined experimentally during pre-analysis, the known optical
parameters found in the literature are used to determine the nine theoretical extinction
angles of each grain for many possible combinations of Euler angles. Then, these
values can be compared to the experimental values to find a close match for some
unique set of Euler angles which specify the orientation of the crystal. The details of
this procedure are discussed next.
First, I will describe how to get the nthε (theoretical extinction angle) from a
grain’s crystal orientation φ, θ, and ψ (Euler angles) and a given sample orientation,
(indexed by n). I use a coordinate system where the z-axis is positive towards the

40
camera, the x-axis is positive towards due east, and the y-axis is positive towards due
north, as shown in Figure 23.
Figure 23. Coordinate axes convention used in the experimental setup.
I begin by assuming that the sample is in its home position (0s0) and the
indicatrix that corresponds to the grain under examination is aligned with each of the
three coordinate axes. This is mathematically represented by the general equation for
an ellipsoid centered at the origin:
12
2
2
2
2
2
=++cz
by
ax (5)
Now I describe a procedure that will produce an equation for the ellipsoid
having an arbitrary orientation specified by the 3 Euler angles and also a sample
orientation specified by ξ and φinner. The left side of the equation for an ellipsoid can
be decomposed into the multiplication of the following matrices:
[ ]
=
==zyx
c
b
azyx srq ,
100
010
001
,
2
2
2
(6)
When multiplied together as follows, the left side of equation (5) results:
x-axis
y-axis
z-axis out of page

41
[ ] 2
2
2
2
2
2
2
2
2
100
010
001
cz
by
ax
zyx
c
b
azyx ++=
=qrs (7)
The next step is to rotate the indicatrix through three Euler angles φ, θ, and ψ.
This rotation scheme was first published in 1776 by the famous mathematician
Leonard Euler (1707-1783) where each rotation can be described by a rotation matrix
that transforms one coordinate system into another. The first rotation is
counterclockwise through an angle φ about the z-axis. The rotation matrix is:
−=
1000cossin0sincos
φφφφ
φλ (8)
The next rotation is counterclockwise through an angle θ about the newly created x-
axis. The rotation matrix is:
−=
θθθθθ
cossin0sincos0
001λ (9)
The final rotation is counterclockwise through an angle ψ about the newly created z-
axis. The rotation matrix is:
−=
1000cossin0sincos
ψψψψ
ψλ (10)
The complete transformation is given by the matrix λ:

42
−+−−−
+−==
θφθφθθψψφθφψψφθφψθψψφθφψψφθφψ
φθψ
coscossinsinsinsincoscoscoscossinsincossincoscossinsinsinsincoscossincossinsincoscoscos
λλλλ (11)
The Euler angle derivation and equations are from Marion (431-433).
“When discussing a rotation, there are two possible conventions: rotation of
the axes, and rotation of the object relative to fixed axes” (Weisstein). The Euler
method is a coordinate transformation of the axes. In this study, it is more useful to
leave the lab coordinate reference frame unchanged and instead rotate the ellipsoid in
space. This is a rotation of an object relative to fixed axes. All positive angles are
taken to be counterclockwise about the given axis of rotation. Next, I will describe
how the rotation matrices are altered to accommodate this convention.
Consider an object of rotation, vector x = [1 0 0]. Now consider (A) a rotation
of the coordinate axes equal to φ = 45 degrees. This has the same relative effect as
(B) a rotation of the object equal to φ = −45 degrees. This is easily demonstrated
pictorially as shown in Figure 24.
Figure 24. Diagram explaining rotation convention used.
axis & object object
axis
θ = 45 axis
θ = −45
object
Initially A B

43
A quick and easy solution to change the Euler angle matrices from a coordinate axis
rotation to an object rotation is to substitute the opposite value for each angle.
However, this might cause confusion. Instead, I converted each matrix to accept the
angle of actual rotation in space so that a rotation of a positive angle corresponds to a
positive angle entered into the calculations. This conversion used the following
property of the sine and cosine functions:
)(cos)(cos
)(sin)(sinxx
xx=−
−=− (12)
This happens to be equivalent to the inverse Euler matrices, 111 ,, −−−
ψθφ λλλ :
−=−
1000cossin0sincos
1 φφφφ
φλ (13)
−=−
θθθθθ
cossin0sincos0001
1λ (14)
−=−
1000cossin0sincos
1 ψψψψ
ψλ (15)
φθψ ρρρρ
ρλ==−
havewe,Setting 1
ii (16)
To find the theoretical extinction angle of a grain with a known orientation, I first
rotate its indicatrix through the three Euler angles describing its orientation. This is
done using the inverse Euler matrices, equations (13-15). Remember that rotating the
body in a positive angle is the same as the coordinates rotating a negative angle. Since

44
the second rotation is defined about the newly created x-axis, angle θ will rotate about
the newly created “x-axis” of the object. Therefore, I must rotate the θ rotation matrix
by φ. The same process must be repeated for the ψ rotation, as it must be adjusted by
the two previous rotations. This is equivalent to applying the rotation matrices in
reverse order so that they act upon themselves. This mathematical process is shown
below and a full derivation is completed in Appendix A.
ψθφφφθφφθφψφθφ ρρρρρρρρρρρρρρρ == −−−− )()()( 1111corrected (17)
If the applied rotations are now inserted into equation (7) as follows: srρqρ 1
correctedcorrected− (18)
then I can determine the equation for the ellipsoid at the home position: orientation
0s0. It is also necessary to determine the ellipsoid for each of the other sequences.
This is done by inserting two more rotation matrices for ξ (xi) and φinner (phi inner):
−=
ξξ
ξξ
ξ
cos0sin010
sin0cosλ (19)
−=
1000cossin0sincos
innerinner
innerinner
inner φφφφ
φλ (20)
These matrices are also adjusted to rotate the object so that the inverse rotation matrix
is used. So by using equation (16) I have:
−==−
ξξ
ξξ
ξξ
cos0sin010
sin0cos1 ρλ (21)

45
−==−
1000cossin0sincos
1innerinner
innerinner
innerinner φφφφ
φφ ρλ (22)
Then equation (17) is then modified so that all rotations are applied as shown in
equation (23):
ψθφφξ ρρρρρρ inner=corrected (23)
Remember that the angle ξ causes the incident light to enter the sample at an angle
different from normal incidence and the speed of light is slower in the sample than in
air. Therefore, refraction occurs inside the sample. This effectively reduces the angle
ξ in the sample from the rotation angle specified during data collection. The
adjustment is a simple correction made using Snell’s Law, described earlier by
equation (3). Because the index of refraction of air is approximately 1, the corrected
angle is:
= −
sample of refractionofindexaverage)(sin
sin duncorrecte1 ξξ (24)
As an example, when ξuncorrected = 45o and the average index of refraction is 1.67, then
ξ = 25.05o.
I now have the equation of the ellipsoid, after all necessary rotations, as
referenced in the fixed coordinate axes of the lab reference frame. This is given by the
following equation:

46
[ ] 1)(
100
010
001
1
2
2
2
1correctedcorrected
=
=
−
−
zyx
c
b
azyx innerinner ψθφφξψθφφξ ρρρρρρρρρρ
srρqρ
(25)
To summarize, I now have the equation of an ellipsoid, originally aligned in
the home position along the lab coordinate reference frame, that has been rotated
through 3 Euler orientation angles and 2 sample orientation angles.
Next, I find the extinction angle from the ellipsoid equation using the criterion
for extinction mentioned earlier. The criterion for extinction is that one of the
polarizers must be aligned with the semi-major (or semi-minor) axis of the ellipse that
results from the intersection of the indicatrix ellipsoid with the plane defining the
wavefront of incident light. According to the coordinate convention of the
experimental system, this plane is the z = 0 plane. The ellipse of intersection is found
by taking z = 0 in equation (25). In practice, I take z = 0 at the outset of the derivation
and then equation (20) gives the appropriate equation for the ellipse directly. The
following generalized equation for an ellipse centered at the origin results:
122 =++ CyBxyAx (26)
(where A,B and C are constants) This is the general equation for an ellipse that may have any orientation within the xy-
plane. The semi-major and semi-minor axes correspond to the index of refraction of
the slow ray and fast ray through the crystal lattice, respectively. (If one of the optic

47
axes of the indicatrix is normal to the xy-plane, then the cross section will be a circle
and the grain will be extinct at all angles).
The theoretical extinction angle, each nthε , is defined as the angle between the
semi-major or the semi-minor axis of the ellipse and the x-axis of the lab reference
frame, whichever ellipse axis makes a positive angle (Figure 25). It will then naturally
fall within the range 0-90 degrees, which I choose as my convention. (Recall that the
extinction angles have a periodicity of 90 degrees, so this procedure just picks out the
extinction angle that is in the first quadrant.)
Figure 25. Cross sectional ellipse showing the theoretical extinction angle.
The constants A, B, and C are used to calculate the theoretical extinction angle
according to:
−
= −
CAB1n
th tan21180
πε
o
(27)

48
This equation is derived for the interested reader in Appendix B. To avoid computer
errors, when A = C, I set nthε = 45 degrees. Also, the computer’s inverse tangent
function has a domain of -90 to 90 degrees. I map the result of the inverse tangent to
the domain 0 to 180 degrees so that the extinction angle will fall in the first quadrant,
according to my convention. Both of these corrections can be summarized by:
nth
nth
nth
else
45 then , if
εε
ε
=
== oCA (28)
nth
nth
nth
nth
nth
else
90 then ,0 if
εε
εεε
=
+=< o
(29)
Now I have developed the procedure to determine the theoretical extinction
angle for a given indicatrix orientation and sample orientation. In the next section, I
will describe how I use this information to find a unique Euler angle orientation for a
particular grain.
I used the Maple mathematics program to setup and test the rotation matrices
to make sure the definitions and sign (+,-) conventions were correct. It also allowed
me to graph the ellipsoid cross section to visually verify the results of the rotation
matrices. Also using Maple, I was able to perform all of the rotations symbolically and
arrive at explicit (albeit complicated) expressions for A, B, and C (the coefficients of
the cross sectional ellipse) in terms of the rotation angles φ, θ, ψ, ξ and φinner and the
values of a, b, and c. Therefore, the matrix multiplication need not be carried out
during the analysis. In order to save space, these equations will be deferred to
Appendix C. The rest of the analysis was carried out using Labview, which is the same

49
development software used in all other aspects of the experiment, such as data
collection.
3.4 Analysis Procedure Definition of a “Match” using R2
The analysis routine I have devised will determine the Euler angle orientation,
(φ, θ, ψ), for each grain being analyzed within a thin section sample using the known
optical parameters and the nine experimental extinction angles. The method for
determining the solution, (φ, θ, ψ), involves working backwards by finding the
theoretical extinction angle for many combinations of φ, θ, ψ, ξ, and φinner. Then, the
set of nine extinction angles determined experimentally is compared with all the sets
of nine extinction angles determined theoretically and the combination with the closest
match overall is going to reveal the Euler angles of the grain under evaluation.
The function describing the closeness of a match between a set of experimental
extinction angles and a set of theoretical extinction angles is a least squares fit called R
squared (R2). The R2 value is calculated according to the following formula:
∑=
−⋅=9
1expth
22 }]),,({2[sin),,(n
nnR εψθφεψθφ (30)
Note that R2 values are unitless. If there is a perfect match in all nine sequences, then
the summation will add to zero, because 00sin o2 = . If all of the angles are the worst
match possible, i.e. ± 45o apart, then because 190sin o2 = , the summation will be
equal to the number of sequences used in the analysis. A value for R2 of <.01 total

50
over nine sequences is what I consider a close match. This would correspond to a
difference < ± .955o per sequence’s extinction angle if the error were evenly distributed
among the sequences, which is comparable to the error in the experimental
measurement. If there were eight sequences with a perfect match and one with a bad
match, then an R2 of <.01 would allow a maximum difference of < ± 2.87o for the bad
sequence. This nonlinearity of the R2 function means one bad experimental extinction
angle can make finding a close match in absolute terms rather difficult.
The reason for using the sine squared of the difference, instead of just the
difference squared, is due to the 90 degree periodicity of the extinction angle. When
the difference between theory and experiment is close to 90 degrees, then the function
should report a close match. For example, suppose I am comparing the two extinction
angles 89° and 1°. If I used the difference squared, ( nthε - n
expε )2, it would consider
these two angles a bad match. In reality, they are only 2° apart. So I use the sine
squared function with a factor of 2 multiplied to the difference, ( nthε - n
expε ), to change
the periodicity from 180° to 90°. The sine function is squared to always return a
positive value. To demonstrate, observe the graph in Figure 28 below of f(x), which is
R2 for one sequence where the variable x represents the theoretical extinction angle
when the experimental extinction angle is zero degrees.

51
Figure 26. Graph of ( )xxf 2sin)( 2= .
Two Conceptually Similar Methods of Minimizing R2
Here I will explain the two conceptually similar methods I devised to find the
unique Euler angle orientation φ, θ, ψ that minimizes R2. Later I will describe some
of the programming tricks I employed to get the most performance out of the two
methods. The building block for either method is to divide the continuous 3-D space
of Euler angles into a discrete grid and then find the minimum R2 value over all the
points on the grid. The total number of sample points depends on the range and grid
spacing. For example, suppose the grid covers the full range of the three Euler angles
(0-180 degrees for each angle) and the grid spacing is 2 degrees. I represent this
minimization with the notation [ ] [ ] [ ]))2,1800 ,2,1800 ,2,1800(min( 2 →→→ ψθφR .
As a second example, suppose the grid focuses on a smaller region with high detail
such as, [ ] [ ] [ ]))01.0,100,01.0,8575,01.0,5040(min( 2 →→→ ψθφR . Note that the
building block used in both methods requires the theoretical extinction angle for each
sequence to be calculated for every point on the grid.

52
Simple Grid Method
The first method is called the Simple Grid Method because it involves only one
iteration of the basic building block above. In fact, it is exactly described by the first
example above: [ ] [ ] [ ]))2,1800,2,1800,2,1800(min( 2 →→→ ψθφR . However, the
calculation is optimized as follows: The number of repetitions of the calculation of a
theoretical extinction angle is specified by equation (32) described later in this chapter.
To save calculation time, I take advantage of the redundancies in calculating all
possible values of nthε over the range of the grid for different grains in a thin section.
Even though a sample may contain as many as 500 to 1000 grains, as long as each one
is composed of the same mineral composition, I can use the same set of nthε for each
grain. Rather than recalculate them each time, it makes sense to save that work in a
file to be used during subsequent runs of the analysis program (for different grains of
the same mineral). Such a file is written for each sequence and it lists the nthε for each
Euler angle specified on the grid. The optimized simple grid method opens up the
entire list and finds the unique Euler angle orientation φ, θ, ψ that minimizes R2 for
that grain.
In practice, the optimized simple grid method by itself had some shortcomings.
First, it takes approximately 20 minutes to write a set of nine sequence files at a 2
degree resolution on the lab computer. Since this is done once per mineral
composition, it is a tolerable wait. However, since all Euler angles are checked when
calculating R2, it still takes about 2 minutes per grain at this 2 degree Euler angle

53
resolution. For a typical sample containing hundreds of grains, this results in many
hours of calculation. Plus, I am left with poor precision (approximately two degrees).
Later, I show that the number of calculations (and hence the calculation time) is a
nonlinear function of the precision desired. This means that simply increasing the grid
resolution by a factor of one half does not simply double the calculation time, but
rather it increases the calculation time by nearly a factor of 8. The dilemma of how to
improve the precision without further increasing the calculation time led me to create
another method, which I will describe in the next section.
Adapted Newton Method
The second method is called the Adapted Newton Method. It was first devised
as a method to find the precise Euler angle match to .01 degrees, given the best match
from the two degree resolution of the Simple Grid Method as a starting point. The
volume of the Euler angle space is like a 3D cube 180 degrees on a side (Figure 27).

54
Figure 27. Depiction of 3-D Euler angle space.
The Simple Grid Method divided that cube into smaller 2 x 2 cubes. Unless the
minimum of the Simple Grid Method is far away from the global minimum, the lowest
minimum of R2 lies within a volume of 8 of these smaller cubes surrounding the best
match from the Simple Grid Method. A naïve approach is to consider using the Grid
Method again on this smaller domain with a grid spacing of 0.01 degree. However,
100 samples per degree in the smaller domain still requires calculating R2 over
64,481,201 Euler angle combinations. This is more than 85 times the number of
samples used by the Simple Grid Method in the first place! This strategy was
successful, but too time-consuming.
Rethinking the problem, I returned to picturing how the function describing R2
varies. It can be likened to a function that describes the temperature of a room given
the point in space (x,y,z). If you were asked to find the lowest temperature in this
room, as quickly as possible, you might employ the hot-cold method. This entails
Phi
0
180 Theta
180
180
Psi

55
moving around the room towards the lowest temperature reading you find. You might
initially just check the temperature at a point on the left and right sides of the room,
and then move to the colder side and then check a few points around there, etc. This
led to the development of the Adapted Newton Method. The premise of the Adapted
Newton Method is to start with a very coarse grid and iterate the grid method
building block, continually shrinking the grid while centering it on the minimum of the
previous grid.
Detailed Methodology of the Adapted Newton Method
The Adapted Newton Method begins with a coarse grid over the entire region
of interest. The region of interest could be two degrees above and below each Euler
angle of the best match from the Simple Grid Method. The region of interest could
also be the entire span of Euler angles used in the Simple Grid Method, 0-180 degrees.
The building block grid of the Adapted Newton Method includes a central point, two
endpoints, and two midpoints for each Euler angle. Using the notation developed
earlier while covering all Euler angles, it would be expressed as:
[ ] [ ] [ ]))45,1800,45,1800,45,1800(min( 2 →→→ ψθφR . There are 5 sampling points
for each Euler angle giving 53 = 125 combinations. This number of combinations is
used in each stage (i.e. iteration of the building block) of the process. During each
successive stage, a new building block grid is created with a resolution that is one half
the resolution used in the previous iteration. In addition, the new building block grid
is centered about the Euler angle combination with the lowest R2 from the previous
iteration.

56
As an example, observe the sampling angles for the first iteration in this case.
Over the entire range there is 0-180 degrees. The center point is 90 degrees, the
endpoints are 0 and 180 degrees and the midpoints are 45 and 135 degrees. The
Adapted Newton Method takes all 125 combinations and minimizes R2. As an
example, if the method finds the minimum at (90,135,90) for (φ, θ, ψ), then the new
coarse grid is centered there. The endpoints are now set to be the nearest points of the
previous iterations grid, which were 45 and 135 degrees for φ and ψ and 90 and 180
degrees for θ. Then the new midpoints are set at 67.5 and 112.5 for φ and ψ and 112.5
and 157.5 degrees for θ. Once a minimum R2 is found, the process continues. After
13 iterations, the resolution in each Euler angle reaches:
oo
13
o
iterations 00549.819245
245
2resolutioninitialresolutionfinal ≈=== (31)
This method is called the Adapted Newton Method because of its similarity to
Sir Isaac Newton’s method of finding the x-intercept of a function.
Comparison of the Number of Repetitions
Even though it includes hundreds of sine and cosine functions, the calculation
of a single extinction angle takes less than one millisecond. However, when the
analysis is done, the calculation of an extinction angle must be made over and over.
When using the Simple Grid Method, in order to test all possible Euler angle
orientations, a range of each angle and a sampling resolution must be defined. The
repetitions of this program are calculated according to the following equation:

57
sequencesnresolution
ofrangeresolution
ofrangeresolution
ofrangesrepetitiongrid ⋅
+
+
+= 111
ψψ
θθ
φφ (32)
The range of 0-180 degrees covers all orientations and was chosen as the convention
for this experiment. Here is a sample calculation of the number of repetitions using 9
sequences and a 2 degree sampling resolution:
139,782,69571,753991912
18012
18012
180 3 =⋅=⋅=⋅
+
+
+=srepetitiongrid (33)
The program needs 19.5 seconds to iterate 100,000 calculations on the lab computer.
In the case of the example above, before any comparisons are made, (like R2), the
program would require 22 minutes per grain. To make things worse, that still only
reveals a solution within two degrees! It is important to note that the number of
calculations is proportional to the inverse cube of the grid spacing.
In the case of the Adapted Newton Method, the total number of repetitions of
the standard calculation is far fewer. To achieve a .00549 degree resolution, 13
iterations are made of the Adapted Newton Method yielding:
14625913125125 =⋅⋅=⋅⋅= sequencesniterationssrepetitionnewton (34)
Therefore, in order to reduce the amount of calculations necessary, the Adapted
Newton Method is the method of choice. However, one must also verify that this (or
any) method yields the true global minimum of the R2 function. Later in the results
section, I will discuss the success rate in practice of all the methods.

58
Detailed Methodology of the Simple Grid Method
Each file is classified in an easy to understand file management system
describing its contents. The data directory is located at C:\Geo Orientation Angle
Data. This contains folders organized by the resolution of each Euler angle. Each of
these folders contains sub-folders organized by the ellipsoid axes a, b, and c specified
to 4 digits of precision. It also contains a file that tells the analysis program how long
each data file is in bytes (more on that later). Finally, each of these folders contains a
file for each sequence, i.e. 0s0 Extinction Angles.dat. The default is a two degree
resolution from 0 to 180 degrees. Figure 28 is an example of the file structure for the
Simple Grid Method.
Figure 28. File structure for the Simple Grid Method.
The theoretical extinction angle is originally found in radians because the
computer makes all sine and cosine calculations in radian mode. However, it is easier
and more intuitive when using degrees. Therefore, I save the extinction angle data
files as degrees by shifting all the radian values by the constant multiplier 180/pi. As
an added bonus, I am able to maintain a higher resolution in terms of digits needed

59
after the decimal point. For example, a .01 degree change is equivalent to a change of
30001745.0 radians. What takes only 2 place values after the decimal in degrees will
consume many more place values in radians.
Next, I made some careful comparisons to determine the best method to save
the files. If each extinction angle were saved as a floating point number it would
consume 8 bytes of hard disk space. If each extinction angle were saved as an integer
number it would consume 1 byte of hard disk space, but I would lose all the
information after the decimal point as each value is rounded to a whole number. I
found this information from the “help section” included with Labview, as indicated
below.
• Double-precision (DBL) - Double-precision floating-point numbers have
64-bit IEEE double-precision format. Double-precision is the default format
for numeric objects.
• Byte (I8) - Byte integer numbers have 8 bits of storage.
To save space and retain all precision, I have employed a creative solution that
converts each extinction angle to two integers and writes them to disk in a continuous
fashion. The first integer byte is equal to the number before the decimal point and the
next integer byte is equal to the 2 significant figures after the decimal point. Since
each extinction angle is calculated between 0 and 90 degrees, the integer’s range from
-128 to 127 is more than enough. Even though this requires a conversion to and from
the integer format, hard drive space is saved and overall execution time is reduced

60
since it will write to disk faster. Table 3 shows the amount of hard drive space saved
by this method which (theoretically) writes to disk four times faster.
Table 3. Memory usage statistics for floating point vs. two integer bytes.
Resolution Combinations Total Memory Used
Memory Used
Memory Saved
Memory Saved
in Degrees Per Angle Combinations Floating Point
2 Integer Bytes Per Sequence
Over 9 Sequences
10 19 6859 0.05 MB 0.01 MB 0.04 MB 0.35 MB
5 37 50653 0.39 MB 0.10 MB 0.29 MB 2.61 MB
2 91 753571 5.75 MB 1.44 MB 4.31 MB 38.81 MB
1 181 5929741 45.24 MB 11.31 MB 33.93 MB 305.37 MB
0.5 361 47045881 358.93 MB 89.73 MB 269.20 MB 2422.79 MB
Each data file is written according to the same standardization, which is a systematic
method similar to how one would count all combinations of three items, given a set
number of items, if order matters. First, φ and θ are held constant while ψ varies
incrementally according to the sampling resolution. When ψ reaches a maximum, θ is
incremented once, and the process repeats. When θ reaches a maximum, φ is
incremented once, and the process repeats. Finally, φ, reaches a maximum when all
nthε have been calculated. Each n
thε is written to the file in the order in which it is
calculated. This effectively “numbers” them according to their position in the file.
The analysis routine employs no advanced selection criteria to eliminate bad
comparisons, rather it compares all extinction angles calculated. The procedure
includes: open all the files in the data directory, read the first entry in each one,
assemble it into a floating point number, convert it to radians, calculate the R2
(summed over all sequences), then do the same for each subsequent entry. This is why

61
the program needs to know how long the files are in bytes. After that task in
complete, I have an array of R2 values ordered according to their Euler angles. I find
the lowest R2 value and its place in the array indicates what Euler angles are the
solution!

62
4.0 RESULTS AND DISCUSSION
The olivine sample that I analyzed using the new optical technique was
acquired from a research group at Yale University. I wanted to compare the results of
my experiment with the known orientations of the minerals in order to see if the
optical method would yield the correct results. The research group at Yale, with the
help of my advisor, Dr. Larry Wilen, used a scanning electron microscope (SEM) to
find the orientation of 21 grains in the sample. The details of the SEM procedure and
the side-by-side comparison between both methods will be explained in the next few
paragraphs. I will also discuss the corrections I made to the analysis.
In the typical application of a scanning electron microscope (SEM), a beam of
electrons is focused onto the surface of a sample. The reflected electrons are used to
map out an image of the surface to be displayed on a monitor. The surface must be
electrically conductive for this procedure to work. In my case, the olivine sample was
covered with a carbon film for conduction. A SEM can display magnifications of
50,000 times or higher, which is much higher magnifications than an optical
microscope can obtain. However, the grains in the olivine sample are visible to the
naked eye, so a high level of magnification was not necessary (Callister 84-85).
Electron backscattered diffraction (EBSD) is the technique utilizing a SEM
that is used by mineralogists and other materials scientists to find the orientations of
mineral grains. The EBSD technique I am about to describe is the same system by
which the Yale University researchers found the orientations in the olivine sample.

63
Since its development in 1954, EBSD has proved to be a fast and user-friendly method
for this type of experimentation. The procedure examines a polished sample, such as a
thin section, that is tilted to a relatively high angle of ~70°. Below is an excerpt from
the HKL Technologies website detailing the EBSD procedure:
The electron beam is... directed at the point of interest on the sample surface: initial elastic scattering of the incident beam causes the electrons to diverge from a point just below the sample surface and to impinge upon crystal planes in all directions. Wherever the Bragg condition for diffraction is satisfied by a family of atomic lattice planes in the crystal, 2 cones of diffracted electrons are produced. These cones are produced for each family of lattice planes (HKL Technology: EBSD Basics). The website continues by stating how the cones can be detected by a phosphor
screen detector attached to a digital CCD camera. The cones produce bands on the
screen, which is close to the sample to collect as many bands as possible. Each band
corresponds to a crystal lattice plane family and the bands are called “Kikuchi bands”.
There are many Kikuchi bands which are then matched with theoretical data to
calculate the 3-D crystallographic orientation in less than 0.02 seconds (HKL
Technology: EBSD Basics). In the case of the Yale University SEM, this output is in
the form of the Euler angles.
Dr. Wilen and the researchers at Yale University analyzed a total of 23 grains
from the olivine sample. Of these, 14 were olivine and 9 were another phase called
orthopyroxene (OPX). However, when analyzing the grains using the optical setup,
one of each phase from the original 23 grains was too close to the edge of the camera
view to be seen in every sequence and could not be analyzed. The remaining 21

64
analyzable grains were numbered 0-20 and tested using the most recent version of the
Adapted Newton Method analysis routine. After some additional theoretical issues
were taken into account, the analysis routine found each grain’s Euler angles in good
agreement with the results from the SEM method.
It was important to make sure I analyzed the exact same grains using both
methods to be able to compare the data effectively. Dr. Wilen worked with the Yale
group on the olivine sample. He told me that when viewing the sample with the SEM,
it was difficult to discern the grain boundaries. Without the cross polarized light, the
only clue available to determine which grain was being analyzing was the cracks in
the sample. He used the cracks as a roadmap to hit as many unique grains as possible
from looking at a printout of an image of the sample taken with a microscope under
crossed polarizers. Since the SEM analyzed a specific region of each grain, he
indicated this region on the printout so I could use the optical technique to analyze the
same region of the grain. This ensured we were both hitting the same grain and it also
minimized any differences that might have arisen from a variation in grain orientation
according to the region of the grain that was analyzed (Wilen).
Figure 29 is an image showing the location of each analysis point for both
methods and its corresponding number.

65
Figure 29. Image showing each analyzed grain’s location. Pixel resolution = 640 x 480.
The SEM made two different runs on the sample to collect Euler angle data.
Therefore, the first 15 grains were analyzed before the final 8 were analyzed. The
overlap between the two runs resulted in 18 unique grains included in the 21 analysis
points. Analysis numbers 3 and 8 are the same grain, 7 and 15 are the same grain, and
12 and 20 are the same grain. It was initially discovered visually that the same grain
was being analyzed in each case. Then both methods verified this by producing
similar results for the Euler orientation angles for each pair of analysis points on the
same grain.
1 mm

66
It is interesting to note that analysis points 14 and 16 had a similar orientation.
These points might be on one grain that has a discontinuous orientation resulting from
stress or strain. Or these two points are on separate grains that split apart from one
grain, also giving them similar orientations. Another interesting pair of analysis points
are point 5 and point 18. They too have similar orientations. However, they are not
anywhere near each other in the sample meaning there are many grains in between
them. In addition, these two grains are not even the same phase, one is olivine and the
other is OPX. Therefore, I attribute the close alignment of these grains to be a
coincidence.
Table 4 shows a comparison of the results from the two methods. These
results were obtained using the final version of the analysis algorithm, which I will
discuss later.

67
Table 4. The Results
Grain Orientations Using Two Methods Grain Euler
Angles Yale Univ.
SEM Ohio Univ.
Optical Phi 62.79 69.83 Theta 94.12 92.43 Psi 68.00 67.67
Olivine 0
R2 0.00445 Phi 134.31 140.84 Theta 62.66 61.82 Psi 90.93 90.85
Olivine 1
R2 0.00871 Phi 63.01 72.19 Theta 52.00 53.88 Psi 122.35 119.24
Olivine 2
R2 0.00244 Phi 81.19 89.60 Theta 55.74 55.01 Psi 140.36 138.69
Olivine 3
R2 0.00160 Phi 43.07 45.61 Theta 19.89 20.04 Psi 0.73 4.59
Olivine 4
R2 0.00010 Phi 169.01 175.13 Theta 18.17 17.35 Psi 101.10 101.15
Olivine 5
R2 0.00053 Phi 34.77 42.38 Theta 102.48 101.09 Psi 149.96 149.56
Olivine 6
R2 0.00181 Phi 57.68 64.30 Theta 104.40 103.37 Psi 83.51 83.20
Olivine 7
R2 0.00156 Phi 80.26 88.38 Theta 55.17 54.81 Psi 141.63 139.94
Olivine 8*
R2 0.00172 Phi 102.16 107.89 Theta 112.01 112.03 Psi 63.11 61.64
Olivine 9
R2 0.01670

68
Grain Orientations Using Two Methods Grain Euler
Angles Yale Univ.
SEM Ohio Univ.
Optical
Phi 40.46 47.52Theta 43.91 45.02Psi 174.93 174.04
Olivine 10
R2 0.00148Phi 75.85 82.20Theta 90.25 90.04Psi 16.50 15.86
OPX 11
R2 0.00139Phi 69.55 75.85Theta 52.40 51.41Psi 32.54 31.86
OPX 12
R2 0.00007Phi 138.56 149.59Theta 57.26 55.66Psi 56.19 52.52
Olivine 13
R2 0.00343Phi 86.40 93.80Theta 87.25 86.33Psi 14.75 16.04
OPX 14
R2 0.00103Phi 58.19 64.36Theta 102.01 103.23Psi 82.85 83.16
Olivine 15*
R2 0.00150Phi 89.93 94.64Theta 86.39 86.36Psi 8.96 9.93
OPX 16
R2 0.00097Phi 72.23 77.09Theta 118.49 119.31Psi 178.71 178.48
OPX 17
R2 0.00175Phi 168.05 173.62Theta 18.44 16.46Psi 91.40 90.67
OPX 18
R2 0.00344Phi 30.85 36.85Theta 50.86 51.03Psi 24.55 23.64
OPX 19
R2 0.00035

69
Grain Orientations Using Two Methods
Grain Euler Angles
Yale Univ. SEM
Ohio Univ. Optical
Phi 71.04 75.80 Theta 51.23 51.76 Psi 32.47 31.06
OPX 20*
R2 0.00052 *Repeat Grain

70
Figure 30 is a graph depicting the orientation of all 21 grains. The x
coordinate is the angle phi, the y coordinate is the angle theta, and the angle that each
line makes with horizontal is psi. If the line is horizontal, then phi is 0° and vertical is
90°. There isn’t a need to make the line a vector pointing in all directions, because a
180° rotation in psi is a rotation equivalent to 0° because of symmetry in the
indicatrix.
Figure 30. Euler angle plot of data from the optical method.

71
Figure 31 is a graph depicting the orientation of all 21 grains alongside the
SEM results. The data from the SEM has been adjusted to account for the difference
in mounting between the SEM setup and the optical setup, which was apparent by a
constant shift in the angle phi.
Red = Optical; Blue = SEM
Figure 31. Euler angle plot of data from both methods side-by-side. SEM data has been adjusted to compensate for a sample mounting difference.

72
Characteristics of Olivine and the Solution to an Initial Error of Psi ± 90° This section will describe the development process by which I arrived at the
final version of the analysis routine. Initially, both the analysis routines derived for
this experiment (discussed in section 3.4) were used to find Euler angles for each of
the 21 analyzable grains in the sample. The first was the Simple Grid Method (with
two degree resolution) followed by the Adapted Newton Method (using 13 iterations
of a 2° to 2° starting grid) to achieve a 0.01 degree resolution. The second was the
Adapted Newton Method by itself (13 iterations of a 0° to 180° starting grid) to
achieve a 0.01 degree resolution. The Euler angles from the two analysis methods
were then compared with each other and with the SEM results.
Neither the Adapted Newton Method alone, nor the Grid Method + Adapted
Newton Method gave results in complete agreement with the SEM data. Two issues
with the results became apparent. The first problem was that sometimes one method
or the other found an answer with a lower value of R2. This means that neither
method found the global minimum every time. The second problem was that for the
best solutions (those with the lowest R2 among the two methods), there was good
agreement with the SEM results only in the angles phi and theta. For the olivine
grains, the best solution (independent of the analysis technique from which it was
derived) differed from the SEM results in the angle psi by 90°. For the OPX grains,
the angle psi was in agreement between the two methods.
The first step in diagnosing the inconsistency between the two analysis
methods involved a close examination of the data for R2 using the grid method. This

73
was the best way to get an overview of the entire 3-D Euler angle space. As a
reminder, the grid method calculates R2 in the following order: first, φ and θ are held
constant while ψ varies incrementally according to the sampling resolution. When
ψ reaches a maximum, θ is incremented once, and the process repeats. When
θ reaches a maximum, φ is incremented once, and the process repeats. Finally,
φ, reaches a maximum and all calculations are complete with the results “numbered”
according to the order in which they were calculated. The images below, (Figure 32),
(Figure 33), and (Figure 34), show three plots of R2 vs. Euler angle taken from the
results of the Grid Method for olivine.
The first plot was created by plotting the R2 value at a two degree resolution in
each Euler angle and shows 753571 data points for
[ ] [ ] [ ])2,1800,2,1800,2,1800(2 →→→ ψθφR .
Figure 32. R2 vs. all Euler angles for one grain. The second plot was created by plotting the R2 value at a two degree resolution in two
Euler angles and shows 8281 data points for
[ ] [ ] [ ])2,1800,2,1800,constant(2 →→ ψθφR .

74
Figure 33. R2 vs. the Euler angles theta and psi for one grain. The third plot was created by plotting the R2 value at a two degree resolution in one
Euler angle and shows 91 data points for [ ] [ ] [ ])2,1800,constant,constant(2 →ψθφR .
Figure 34. R2 vs. the Euler angles theta and psi for one grain.
Each successive plot has the effect of zooming in on the apparent minimum
from the plot before it. From examining these plots, I discovered that there was a near
degeneracy with respect to the angle psi. R2 appears to reach a local minimum at a
periodic 90° interval in psi. So, I concluded that the main reason that one or the other
analysis method was sometimes finding the wrong global minimum was because there

75
were many close local minima over the entire 3-D space. This was corroborated by the
fact that when the results from the two analysis methods were different, the difference
was usually just ± 90° in psi. To check this idea out, I re-minimized the solution from
the Simple Grid + Adapted Newton Method for each grain about the point (phi, theta,
psi + 90°) and chose the lowest R2 between them. This always gave the correct global
minimum (i.e. the one that agreed with the best choice among the two methods).
However, recall that the Simple Grid method is very slow; later, I discuss a more
efficient method to get the global minimum.
At this point, I was still left with the second problem, namely that all the
olivine results differ from the SEM results by 90° in psi and that the OPX grains were
in agreement. Dr. Wilen had earlier suggested an inconsistency between the angle
conventions as the cause for discrepancy. However, this bothered me because it didn’t
happen with all of the grains; the OPX grains seemed to be immune from the problem.
I spent about 6 months trying to discover what might be causing the
discrepancy. The quest for the answer revealed a physical property of olivine to be the
cause - a mineral characteristic called solid solution. More specifically, the psi ± 90o
near degeneracy (and hence the discrepancy) was due to how olivine’s solid solution
affected the values for the refractive indices: α, β, and γ. To better describe this
relationship, I will first define solid solution as a phenomenon whereby one or more
ions can be substituted for other ions in the mineral’s atomic structure. This must be
done without distorting the structure of the crystal or introducing a chemical inequality
that may cause instability. Therefore, the best substitutions are within 15% of the size

76
of the ion replaced and of equal electronic charge. There are different forms of olivine
that depend on the chemical composition, which is written as: (Mg,Fe)2SiO4. In
olivine, the cations (positive ions) Mg2+ and Fe2+ can substitute for each other. This
causes what is called a solid solution series, which is a range of olivine minerals
varied by percentage composition of the pure end members. These pure end members
are Mg2SiO4 (called forsterite and abbreviated as Fo) and Fe2SiO4 (called fayalite and
abbreviated as Fa). The in between compositions are denoted by the relative
percentages of each end member (Sen 53-54). Since olivine’s chemical composition varies from end member to end member,
the values for the refractive indices also vary. These values are found in a book that
compiles experimental and observational data on different minerals, such as An
Introduction to the Rock-Forming Minerals by Deer, Howie and Zussman. The
refractive indices listed in that book for the end members of olivine and OPX are in
Table 5.
Table 5. Index of refraction data for olivine and OPX.
Olivine OPX forsterite,
Mg2SiO4 fayalite, Fe2SiO4
enstatite, MgSiO3
ferrosilite, FeSiO3
α 1.635 1.827 y 1.650 1.768 y β 1.651 1.869 z 1.653 1.770 x γ 1.670 1.879 x 1.658 1.788 z 2Vγ 82o 134o 55-127-55o
(Deer 3, 155)
Besides listing the refractive indices, the book also shows how the
crystallographic axes align with the axes of the optical indicatrix. For olivine, the γ
refractive index is aligned along the x-axis, the α refractive index is aligned along the

77
y-axis and the β refractive index is aligned along the z-axis. This means if the grain
had an Euler angle orientation of zero degrees in each angle, then maximum
birefringence would be seen in my experimental setup (which views the grain parallel
to the z-axis). Figure 35 illustrates the relationship between the crystal axes and the
indicatrix axes (Deer 3).
Figure 35. Relationship between the crystal axes and the indicatrix axes in olivine.
The values I used for α, β, and γ were calculated assuming the most common
chemical composition for olivine: a magnesium rich 90% Mg and 10% Fe, indicated
as 10% fayalite: Fa10. The calculation was done by creating a linear variation between
the end members and interpolating each refractive index at 90% Mg and 10% Fe. This
is where I found the biggest clue to what was causing the near degeneracy in the Euler
angle psi. It is related to the angle 2Vγ, which is the angle between the two optic axes
as measured so that the γ axis in the indicatrix bisects the angle. (Incidentally 2Vα is
measured across the α axis, but I choose to stay consistent with 2Vγ). The relationship
z = β
y = α
x = γ

78
between the three indices of refraction and the angle 2Vγ is as shown below from
Neese (78).
)()(Vcos 222
222
γ2
αγββγα
−−
= (35)
(where the angle Vγ is half of 2Vγ)
The four values are linked by an equation, so this means 2Vγ can be calculated from
known indices of refraction as opposed to a direct measurement. (My experimental
setup is not equipped to measure 2Vγ or the indices of refraction). In fact, if any three
of the four variables in the equation are known, then the fourth variable can be
calculated or found using a plot called a nomogram (Bloss 159). Even though the
angle 2Vγ is not used in the calculation of the theoretical extinction angle or R2, it
proved to be an important indicator of the correct geometry of the indicatrix ellipsoid.
When the angle 2Vγ surpasses 90o, olivine changes optic sign from positive to neutral
(at exactly 90o) to negative. (Neese 78). Deer said about olivine, “The optic axial
angle likewise varies systematically from 2Vγ = 82o for Mg2SiO4 to 2Vγ = 134o for
Fe2SiO4, the sign changing at about Fa13” (10). The problem is, when using
α, β, and γ as linearly interpolated values, the change in optic sign occurs between Fa6
and Fa7. At Fa10, olivine should be biaxial positive. Therefore, I was using
interpolated values of α, β, and γ that made olivine appear biaxial negative when in
fact it was biaxial positive!
The 2V angle can be measured experimentally with a higher degree of
precision than it can be calculated from the measured refractive indices. In other

79
words, a small variation in the ratio among β and the other two refractive indices
causes a large variation in the angle 2V. As a matter of fact, I calculated 2Vγ from the
indices of refraction listed for the end points and discovered that instead of 82o and
134o, I got 86o and 128.9o respectively. So I devised a new method for calculating
α, β, and γ for use in the analysis routine taking optic sign vs. composition into
account. It still applies a linear interpolation for α and γ, but now it linearly
interpolates the measured data for 2Vγ using the end values in the literature (82o and
134o). This causes a change of sign around Fa13 and gives a value of 87.2o at Fa10.
Then, using the interpolated value of 2Vγ, Ι calculate β from the equation relating all
four variables. The graph in Figure 36 illustrates the difference between the two
methods.
0 10 20 30 40 50 60 70 80 90 100
Percent Fayalite
Beta Calculated
Beta Interpolated
Optic Sign vs. Composition For OlivineBiaxial Positive
Biaxial Negative
Figure 36. Optic sign vs. composition for olivine.
This showed that the relationship among α, β, and γ as compared to each other
is most important in calculating the Euler orientation angles. So how did
misinterpreting the optic sign cause the angle psi to be off by almost exactly 90°?
This has to do with the alignment of the crystal axes to the indicatrix axes and how the
Euler angle rotations are defined (all stated previously). Both optic axes of olivine

80
initially lie in the x-y plane. So, when the 2V angle is very close to 90°, an extra
rotation of psi by 90° will produce theoretical extinction angles as if the mineral were
the opposite optical sign and had not undergone the extra rotation.
The OPX in the sample was not off by psi ± 90° because there was not a
problem with the interpolated values of the indices of refraction not matching the optic
sign of OPX. OPX is also biaxial positive at a 90% Mg and 10% Fe composition and
if 2Vγ is used to find the β index of refraction it agrees with the optic sign. Therefore,
I did not need adjust the indices for OPX. I just used a straight linear interpolation
like I had originally used for olivine. Incidentally, the 2Vγ angle in OPX does not vary
linearly with composition over the entire range.
As an interesting note, had olivine’s indices of refraction been aligned with the
crystallographic axes differently, then the consistency of the discrepancy might not
have been detected as readily. This is because misinterpreted optic sign would not
have exclusively affected the angle psi. In other words there would have still been a
90° rotational difference from the switch in optic sign, but that would have been in a
different plane from the psi rotation. This means it would have changed all three
Euler angles making the consistency of the discrepancy more difficult to detect.
Table 6 below shows the final parameters used to run the analysis routine. As
a reminder, the values of a, b, and c are the input variables into the equation for the
indicatrix ellipsoid.

81
Table 6. Final optical parameters: a, b, and c used to analyze olivine and OPX.
Final Parameters Used Olivine OPX a 1.6909 1.6647 b 1.6542 1.6609 c 1.6714 1.6701
With these parameters, the analysis method (using one of the versions that
finds the global minimum, as discussed above) finds a solution consistent with the
SEM results.
The next task was to create one optimized theoretical analysis technique that
finds this global minimum for each grain. Ironically, the near degeneracy of the angle
psi which alerted me to the inconsistency in the first place causes the two theoretical
methods (Newton and Grid) to have difficulty in finding the global minimum for each
grain (but at least this global minimum is now correct!).
The adaptation that fixed this problem most efficiently involved dropping the
Simple Grid Method completely (because it is slow) and increasing the number of
repetitions of the Adapted Newton Method by decreasing the starting grid. The
Adapted Newton Method is run eight times and the lowest R2 of these eight is checked
against psi + 90° to find the final lowest R2 solution. Each of the 8 runs of the
Adapted Newton Method is one equal sub-section of the entire 3-D Euler angle space
that was shown in Figure 27. Instead of one grid using points spaced 45° apart, each
of the 8 grids uses points spaced 22.5° apart. As an example, the first grid uses
endpoints of 0° and 90°, a center point of 45°, and midpoints of 22.5° and 67.5°. On
the lab computer, the new Adapted Newton Method (eight times with a check at psi +
90°) takes between 20 and 25 seconds of calculation time per grain.

82
After this programming adjustment was made, the new Adapted Newton
Method became the best minimization method. It found results consistent with the
SEM results for each and every grain as displayed in Table 4. In addition, there was
no longer a need to write memory consuming files and the calculation time was
reasonably short.

83
5.0 CONCLUSIONS AND APPLICATIONS TO FUTURE RESEARCH
In conclusion, the optical experimental technique I developed has been shown
to be able to accurately determine the orientation of the biaxial minerals olivine and
OPX in a thin section. The experimental system images a thin section between
rotating crossed polarizers and determines an experimental extinction angle for nine
sample orientations. By calculating the theoretical extinction angles for a coarse grid
of possible Euler angle orientations and continually narrowing the grid down to the
desired resolution, the best matching Euler angles can be found.
The optical method I developed costs much less than a comparably accurate
scanning electron microscope that uses electron backscattered diffraction. The cost
savings is augmented by the ability to run other analyses from the image data such as
grain size, elongation, and nearest neighbor correlations. Because of the relatively
small size of the setup, it is conceivable that the system could be designed to operate
using a laptop and battery powered rotation stages. This would enable the setup to be
taken into the field, which is currently not possible with the SEM.
Future considerations for this procedure would be an analysis routine that
would be able to decipher the mineral and/or composition of a grain in a sample, given
the known Euler angle orientation determined by some other method (such as the
SEM). The routine would use the known Euler angles to calculate all nine theoretical
extinction angles for many combinations of α, β, and γ. Then, by finding the best

84
matches between the theoretical extinction angles and the experimental extinction
angles, the ratios among the three indices can be determined. A database of known
indices of refraction for all possible minerals and/or compositions would then be
consulted to determine what satisfies the determined ratios of α, β, and γ.
The success of this new application depends on factors such as whether or not
nine sequences are enough to uniquely distinguish two minerals and/or compositions.
However, one way to increase the data is to analyze a polycrystalline sample that
consists of many grains of the same unknown mineral composition with many random
(but still known) orientations. By combining the data it might be possible to constrain
the indices of refraction enough to find unique numbers for α, β, and γ, instead of just
ratios, making a unique solution possible.
As the procedure stands now, it is immediately applicable to geologists and
geophysicists in search of a low cost experimental tool for finding the texture of
biaxial minerals. The only needed parameters outside of those measured by the
system are: the three indices of refraction α, β, and γ, their relationship to the crystal
axes, and a verification that β is consistent with the optical sign. If there is a problem
with β, then it can be adjusted according to the measured value of 2V.

85
6.0 REFERENCES Abramowitz, Mortimer, Matthew J. Parry-Hill, and Michael W. Davidson. Molecular
Expressions Microscopy Primer: Light and Color - Electromagnetic Radiation:
Interactive Java Tutorial. 2003. Olympus America Inc. and The Florida State
University.
30 Mar. 2005 <http://micro.magnet.fsu.edu/primer/java/electromagnetic/>.
Berry, L.G., Brian Mason and R.V. Dietrich. Mineralogy - Concepts, Descriptions,
Determinations. New York: W.H. Freeman & Co., 1983.
Bloss, Donald F. An Introduction to the Methods of Optical Crystallography. New
York: Holt, Rinehart and Winston, 1961.
Callister, William D. Jr. Materials Science and Engineering An Introduction. New
York: John Wiley & Sons, Inc., 2003.
Deer, W.A., R.A. Howie and J. Zussman. An Introduction to the Rock-Forming
Minerals. Harlow, England: Pearson Education Limited, 1992.
Furlong, Kevin. “Earthquakes Illuminate Mantle Under Tibet.” 1996. Earth &
Environmental Systems Institute, Penn State University. 17 May 2005
<http://www.psu.edu/ur/archives/SCIENCETECH/Tibet.html>.
Gribble, Colin D. and Allan J. Hall. Optical Mineralogy Principle and Practice. New
York: Chapman & Hall, 1992.
Hecht, Eugene. Optics. San Francisco: Addison Wesley, 2002.

86
“HKL Technology: EBSD Basics.” 2005 HKL Technology. 27 May 2005
<http://www.hkltechnology.com/?pid=4,18&articles>.
Karato, Shun-ichiro. The Dynamic Structure of the Deep Earth. New Jersey: Princeton
University Press, 2003.
Marion, Jerry B. and Stephen T. Thorton. Classical Dynamics of Particles and
Systems. Fort Worth: Harcourt College Publishers, 1995.
Neese, William D. Introduction to Optical Mineralogy. New York: Oxford University
Press, 2004.
Nelson, Stephen A. “Biaxial Minerals.” Mineralogy. Course Website. 2002.
Tulane University. 30 Mar. 2005 <http://www.tulane.edu/~sanelson/geol211/
biaxial.htm>.
---. “The Isotropic Indicatrix, Isotropic Minerals, and the Immersion Method.”
Mineralogy. Course Website. 2002. Tulane University. 30 Mar. 2005
<http://www.tulane.edu/~sanelson/geol211/isotropic_minerals.htm>.
---. “Uniaxial Minerals, Uniaxial Indicatrix, Optic Sign, & Ray Path.”
Mineralogy. Course Website. 2002. Tulane University. 30 Mar. 2005
<http://www.tulane.edu/~sanelson/geol211/uniaxial_minerals.htm >.
Sen, Gautam. Earth’s Materials: Minerals and Rocks. New Jersey: Prentice Hall, 2001.
Shelley, David. Manual of Optical Mineralogy. New York: Elsevier, 1975.
Weisstein, Eric W. “Rotation Matrix.” MathWorld - A Wolfram Web Resource. 1999.
Wolfram Research Inc. 30 Mar. 2005
<http://mathworld.wolfram.com/RotationMatrix.html>.

87
Wenk, H.-R., Dawson, P.R., et al. “AGU Mantle Video.” Texturing of Rocks in the
Earth’s Mantle. 1999. UC Berkeley Texture Laboratory. 17 May 2005
<http://eps.berkeley.edu/~wenk/TexturePage/AGU-Mantle-Video.htm>.
Wilen, Larry. Private communication. 2003 - 2005.

88
Appendix A A derivation of the corrected rotation matrix. Given the matrix identity relationships: IAA =−1 1111)( −−−− = ABCABC Since mathematically the rotations of phi and psi are in the same plane when θ = 0,
then:
ψ
φψφ
ψψψψ
φφφφ
ψφφψψφφψφψψφψφφψ
φφφφ
ψψψψ
φφφφ
ρ
ρρρ
=
−=
−
+−−+
=
−
−
−=
−
1000cossin0sincos
1000cossin0sincos
1000sinsincoscossincossincos0sincossincossinsincoscos
1000cossin0sincos
1000cossin0sincos
1000cossin0sincos
1
So therefore,
ψθφ
φψφθφ
φφθφφθφψφθφ
φφθφφθφψφθφ
ρρρρρρρρ
ρρρρρρρρρρρ
ρρρρρρρρρρρρ
=
=
=
=
−
−−−−
−−−−
1
1111
1111corrected )()()(

89
Appendix B Derivation of the formula for the angle between the x-axis and the semi-major axis or
semi-minor axis of an ellipse.
Starting with the equation for an ellipse centered at the origin:
12
2
2
2
=+by
ax
Then rotate the body of the ellipse by an angle θ:
[ ]
[ ]
22
2cos2
2sin2cossin2
2cossin22
2
2sin2
2cos
22
2cos2
2sin2cossin
2cossin
2cossin
2cossin2
2
2sin2
2cos
2
2cos2
2cossin
2
2sin2
2cossin
2cossin
2
2sin2
2cossin
2
2cos2
2
2cos2
cossin
2
2sin2cossin
2cossin
2
2sin2cossin
2
2cos
cossinsincos
2cos
2sin
2sin
2cos
cossinsincos
21
0
021
cossinsincos
cossinsincos
21
0
021
cossinsincos
yba
xyba
xba
yba
xybaba
xba
b
y
b
xy
a
y
a
xy
b
xy
b
x
a
xy
a
x
yx
b
y
b
x
a
y
a
x
b
y
b
x
a
y
a
x
yx
b
y
b
x
a
y
a
x
yx
b
ayxyx
yx
b
ayx
++−++
=++−+−++
=+−
+++−++
=
+−
++
−++
=−
+−
+
=−
+−+
=−
−
θθθθθθθθ
θθθθθθθθθθθθ
θθθ
θθθθθθθθθ
θθθ
θθθ
θθθθθθ
θθθθθθθθ
θθθθ
θθθθ
θθθθ
θθθθ

90
Define A = coefficient of x2, B = coefficient of xy, and C = coefficient of y2
+=
−=
+= 2
2
2
2
222
2
2
2 cossincossin2cossin2sincosba
Cba
Bba
A θθθθθθθθ
Let’s try to determine what θ is. The following identities from trigonometry are
employed extensively:
θθθθ
θθθθ
θθ
2cos1sin2cossin2cos1cos2sincos
1sincos
222
222
22
−=−=−
=−=−
=+
A good place to start is to simplify things later by combining terms:
( )
+=
++=
++
+=
++
+=+
22
2222
222
222
2
2
2
2
2
2
2
2
11
11sincos
11sin11cos
cossinsincos
ba
ba
baba
babaCA
θθ
θθ
θθθθ
Now let’s try subtraction:

91
( ) ( )
( )
( )
( )θ
θθ
θθθ
θθθ
θθθθ
θθ
θθθθ
2cos11
2cos2cos
1sincos2cos
1cossin2cos
1cossin1sincos
11sin11cos
cossinsincos
22
22
222
2
222
2
222
222
222
222
2
2
2
2
2
2
2
2
−=
−=
−−=
−+=
−+−=
−+
−=
+−
+=−
ba
ba
ba
ba
ba
abba
babaCA
After taking another look at B, it appears I have another simplification that will
eliminate all dependence of A, B, and C on “a” or “b”:
( )
θθθ
θθθ
θ
θθ
2tan2cos2sin
2coscossin2
2cos11
cossin211
22
22
=
=
=
−
−
=−
ba
baCA
B
Now solving for θ is trivial:
−
= −
CAB1tan
21θ
Converting to degrees will add an extra term:
−
= −
CAB1tan
21180
πθ
o

92
Appendix C The coefficients of the 2D ellipse centered at the origin in terms of the rotation angles
φ, θ, ψ, ξ and φinner and the values of a, b, and c.
Equation of an ellipse using primes: 122 =′+′+′ yCxyBxA
Please Note: 222
1,1,1c
Cb
Ba
A ===
** = “to the power of”
A′ =B*cos(xi)**2*cos(psi)**2*cos(phi_in)**2+C*cos(theta)**2-2*cos(phi_in)* cos(theta)*B*cos(psi)*sin(psi)*cos(xi)**2*sin(phi_in)-1*C*cos(xi)**2* cos(phi_in)**2*cos(theta)**2-1*A*cos(psi)**2*cos(xi)**2*cos(theta)**2 +2*cos(xi)*sin(phi_in)*cos(phi)*C*sin(theta)*sin(xi)*cos(theta)+B*cos(xi)**2+A-1*B*cos(psi)**2*cos(theta)**2-1*B*cos(xi)**2*cos(phi_in)**2+C*cos(phi)**2 *cos(xi)**2+C*cos(xi)**2*cos(phi_in)**2+2*A*cos(psi)**2*cos(xi)**2+A*cos(xi)**2*cos(theta)**2+A*cos(psi)**2*cos(theta)**2-2*B*cos(xi)**2*cos(psi)**2-1*B* cos(xi)**2*cos(phi)**2+2*cos(phi_in)*sin(phi)*C*cos(phi)*cos(xi)**2*sin(phi_in)-2*cos(phi_in)*sin(phi)*C*cos(phi)*cos(xi)**2*sin(phi_in)*cos(theta)**2+2*A*cos (psi)**2*cos(phi)**2*cos(xi)**2*cos(phi_in)**2-4*cos(phi)*A*cos(psi)*sin(psi) *cos(theta)*sin(phi)*cos(xi)**2*cos(phi_in)**2-2*cos(xi)*cos(phi_in)*cos(phi)* B*sin(psi)*cos(psi)*sin(xi)*sin(theta)+2*sin(phi)*A*cos(psi)*sin(psi)*cos(theta) *cos(phi)*cos(xi)**2-2*cos(phi_in)*sin(phi)*A*cos(theta)**2*cos(phi)*cos(xi)**2 *sin(phi_in)*cos(psi)**2+2*cos(phi_in)*cos(phi)*B*sin(phi)*cos(xi)**2*sin(phi_in)*cos(psi)**2-2*cos(phi_in)*cos(phi)*B*sin(phi)*cos(xi)**2*sin(phi_in)-2*cos(xi)*sin(phi_in)*cos(phi)*cos(theta)*A*sin(xi)*sin(theta)+2*cos(xi)*sin(phi_in)*cos(phi)*cos(theta)*A*sin(xi)*sin(theta)*cos(psi)**2+B*cos(psi)**2*cos(xi)**2* cos(theta)**2-2*cos(xi)*cos(phi_in)*sin(phi)*cos(theta)*A*sin(xi)*sin(theta)+ 2*cos(phi_in)*cos(theta)*A*sin(psi)*cos(psi)*cos(xi)**2*sin(phi_in)-1*A*cos(psi)**2*cos(xi)**2*cos(phi_in)**2-2*B*cos(psi)**2*cos(theta)**2 *cos(phi)**2*cos(xi)**2*cos(phi_in)**2-2*C*cos(phi)**2*cos(xi)**2 *cos(phi_in)**2-1*C*cos(phi)**2*cos(xi)**2*cos(theta)**2-1*A*cos(theta)**2+2*A*cos(theta)**2*cos(phi)**2*cos(xi)**2*cos(psi)**2

93
*cos(phi_in)**2-2*sin(phi)*B*sin(psi)*cos(psi)*cos(theta)*cos(phi)*cos(xi)**2 +2*cos(xi)*cos(phi_in)*sin(phi)*cos(theta)*A*sin(xi)*sin(theta)*cos(psi)**2+A *cos(theta)**2*cos(phi)**2*cos(xi)**2-2*B*cos(xi)**2*cos(psi)**2*cos(phi)**2 *cos(phi_in)**2+B*cos(psi)**2-4*cos(phi_in)*A*cos(psi)*sin(psi)* cos(theta)*cos(phi)**2*cos(xi)**2*sin(phi_in)-1*A*cos(psi)**2-2*cos(xi)*sin(phi_in)*cos(phi)*cos(theta)*B*cos(psi)**2*sin(xi)*sin(theta)-2*cos(phi_in)*cos(phi)*A*cos(psi)**2*sin(phi)*cos(xi)**2*sin(phi_in)+2*cos(phi_in)*sin(phi)*B*cos(psi)**2*cos(theta)**2*cos(phi)*cos(xi)**2*sin(phi_in)+2*B*cos(xi)**2*cos(phi)**2*cos(phi_in)**2-2*cos(xi)*cos(phi_in)*sin(phi)*cos(theta)*B *cos(psi)**2*sin(xi)*sin(theta)+4*cos(phi)*B*sin(psi)*cos(psi)*cos(theta)*sin(phi) *cos(xi)**2*cos(phi_in)**2+2*cos(xi)*sin(phi_in)*sin(phi)*B*sin(psi)*cos(psi)*sin(xi)*sin(theta)-2*cos(xi)*sin(phi_in)*sin(phi)*A*cos(psi)*sin(psi)*sin(xi)*sin(theta) +4*cos(phi_in)*B*sin(psi)*cos(psi)*cos(theta)*cos(phi)**2*cos(xi)**2 *sin(phi_in)-1*C*cos(theta)**2*cos(xi)**2+2*cos(xi)*cos(phi_in)*sin(phi)*C *sin(theta)*sin(xi)*cos(theta)+2*cos(xi)*cos(phi_in)*cos(phi)*A*cos(psi)*sin(psi)* sin(xi)*sin(theta)+B*cos(xi)**2*cos(psi)**2*cos(phi)**2+2*C*cos(phi)**2*cos(xi)**2*cos(theta)**2*cos(phi_in)**2+2*cos(phi_in)*sin(phi)*A*cos(theta)**2*cos(phi)*cos(xi)**2*sin(phi_in)+B*cos(psi)**2*cos(theta)**2*cos(xi)**2*cos(phi_in)**2+A*cos(theta)**2*cos(xi)**2*cos(phi_in)**2-1*A*cos(theta)**2*cos(xi)**2* cos(phi_in)**2*cos(psi)**2-2*A*cos(theta)**2*cos(phi)**2*cos(xi)**2* cos(phi_in)**2-1*A*cos(theta)**2*cos(phi)**2*cos(xi)**2*cos(psi)**2-1*A*cos(psi)**2*cos(xi)**2*cos(phi)**2+B*cos(psi)**2*cos(theta)**2*cos(phi)**2*cos(xi)**2-1*A*cos(xi)**2; B′ =-2*cos(xi)*cos(phi_in)*C*sin(phi_in)*cos(theta)**2-4*cos(xi)*sin(phi_in)*B* cos(psi)**2*cos(theta)**2*cos(phi)**2*cos(phi_in)+4*cos(xi)*cos(phi_in)*A *cos(psi)**2*cos(phi)**2*sin(phi_in)-8*cos(xi)*B*sin(psi)*cos(psi)*cos(theta)* cos(phi)**2*cos(phi_in)**2+4*cos(xi)*cos(phi)*A*cos(psi)**2*sin(phi) *cos(phi_in)**2+2*cos(xi)*cos(phi)*C*sin(phi)-2*cos(xi)*B*sin(psi)*cos(psi) *cos(theta)+4*cos(xi)*B*sin(psi)*cos(psi)*cos(theta)*cos(phi_in)**2-2*sin(xi)*sin(theta)*B*cos(psi)*sin(psi)*cos(phi)*sin(phi_in)+2*cos(xi)*cos(phi)*B *cos(psi)**2*cos(theta)**2*sin(phi)+8*cos(xi)*cos(phi_in)*cos(phi)*B*sin(psi)* cos(psi)*cos(theta)*sin(phi)*sin(phi_in)+4*cos(xi)*cos(phi)*C*sin(phi)*cos(theta)**2*cos(phi_in)**2-4*cos(xi)*sin(phi)*B*cos(phi)*cos(psi)**2*cos(phi_in)**2+ 4*cos(xi)*sin(phi_in)*A*cos(theta)**2*cos(phi)**2*cos(phi_in)*cos(psi)**2-4*cos(xi)*cos(phi)*C*sin(phi)*cos(phi_in)**2-2*sin(xi)*C*cos(theta)*sin(theta) *cos(phi)*cos(phi_in)+2*sin(xi)*sin(theta)*B*cos(psi)**2*cos(theta)*cos(phi)* cos(phi_in)+2*sin(xi)*C*cos(theta)*sin(theta)*sin(phi)*sin(phi_in)-2*sin(xi) *sin(theta)*B*cos(psi)*sin(psi)*sin(phi)*cos(phi_in)-2*sin(xi)*sin(theta)* B*cos(psi)**2*cos(theta)*sin(phi)*sin(phi_in)+2*sin(xi)*sin(theta)*A*cos(theta) *cos(phi)*cos(phi_in)-2*sin(xi)*sin(theta)*A*cos(theta)*cos(phi)*cos(phi_in) *cos(psi)**2-4*cos(xi)*sin(phi)*B*cos(psi)**2*cos(theta)**2*cos(phi) *cos(phi_in)**2+2*sin(xi)*sin(theta)*A*sin(psi)*cos(psi)*cos(phi)*sin(phi_in)

94
+2*sin(xi)*sin(theta)*A*sin(psi)*cos(psi)*sin(phi)*cos(phi_in)-4*cos(xi) *cos(phi_in)*B*cos(phi)**2*sin(phi_in)*cos(psi)**2+2*cos(xi)*sin(phi_in)*B*cos(phi_in)*cos(psi)**2+2*cos(xi)*cos(phi_in)*B*cos(psi)**2*cos(theta)**2*sin(phi_in)+2*cos(xi)*cos(phi)*A*cos(theta)**2*sin(phi)-4*cos(xi)*cos(phi)*A* cos(theta)**2*sin(phi)*cos(phi_in)**2-8*cos(xi)*cos(phi_in)* cos(phi)*A*cos(psi)*sin(psi)*cos(theta)*sin(phi)*sin(phi_in)-4*cos(xi)*sin(phi_in)*A*cos(theta)**2*cos(phi)**2*cos(phi_in)-2*cos(xi)*sin(phi)*B*cos(phi)+4*cos(xi)*sin(phi)*B*cos(phi)* cos(phi_in)**2+2*cos(xi)*sin(phi)*B*cos(phi)*cos(psi)**2+4*cos(xi)* cos(phi_in)*B*cos(phi)**2*sin(phi_in)+2*sin(xi)*sin(theta)*A*cos(theta)*sin(phi)*sin(phi_in)*cos(psi)**2-2*cos(xi)*cos(phi)*C*sin(phi)*cos(theta)**2+ 4*cos(xi)*cos(theta)*B*cos(psi)*sin(psi)*cos(phi)**2-4*cos(xi)* cos(theta)*A*sin(psi)*cos(psi)*cos(phi)**2-2*sin(xi)*sin(theta)* A*cos(theta)*sin(phi)*sin(phi_in)+2*cos(xi)*A*cos(psi)*sin(psi) *cos(theta)-4*cos(xi)*sin(phi_in)*C*cos(phi)**2*cos(phi_in)+4*cos(xi)*sin(phi_in) *C*cos(phi)**2*cos(phi_in)*cos(theta)**2-4*cos(xi)*A*cos(psi)*sin(psi)*cos(theta) *cos(phi_in)**2-2*cos(xi)*cos(phi_in)*A*cos(theta)**2*sin(phi_in)*cos(psi)**2-2*cos(xi)*cos(phi)*A*cos(theta)**2*sin(phi)*cos(psi)**2+4*cos(xi)*cos(phi)*A *cos(theta)**2*sin(phi)*cos(psi)**2*cos(phi_in)**2+2*cos(xi)*cos(phi_in)*A*cos(theta)**2*sin(phi_in)-2*cos(xi)*sin(phi_in)*B*cos(phi_in)+8 *cos(xi)*A*cos(psi)*sin(psi)*cos(theta)*cos(phi)**2*cos(phi_in)**2-2*cos(xi)*sin(phi_in)*A*cos(psi)**2*cos(phi_in)+2*cos(xi)*cos(phi_in)*C*sin(phi_in)-2*cos(xi)*sin(phi)*A*cos(psi)**2*cos(phi); C ′ =-1*B*cos(phi_in)**2*cos(psi)**2-1*C*cos(theta)**2-2*A*cos(theta)**2 *cos(psi)**2*cos(phi)**2*cos(phi_in)**2+A*cos(psi)**2*cos(phi_in)**2+2*C *cos(phi)**2*cos(phi_in)**2+C*cos(theta)**2*cos(phi)**2+C*cos(theta)**2*cos(phi_in)**2-1*B*cos(phi)**2*cos(psi)**2-1*A*cos(theta)**2*cos(phi_in)**2-2*B*cos(phi_in)**2*cos(phi)**2-1*C*cos(phi)**2+2*cos(phi)*B*sin(psi) *cos(psi)*cos(theta)*sin(phi)+B*cos(phi_in)**2+B*cos(phi)**2-1*C* cos(phi_in)**2+B*cos(psi)**2*cos(theta)**2-2*sin(phi)*A*cos(psi)*sin(psi) *cos(theta)*cos(phi)-1*A*cos(psi)**2*cos(theta)**2+A*cos(psi)**2 *cos(phi)**2-1*B*cos(psi)**2*cos(theta)**2*cos(phi)**2+A*cos(theta)**2-1*A* cos(theta)**2*cos(phi)**2-2*sin(phi_in)*cos(theta)*A*sin(psi)*cos(psi) *cos(phi_in)+4*sin(phi_in)*A*cos(psi)*sin(psi)*cos(theta)*cos(phi)**2*cos(phi_in)-2*sin(phi_in)*sin(phi)*A*cos(theta)**2*cos(phi)*cos(phi_in)+2* sin(phi_in)*cos(theta)*B*cos(psi)*sin(psi)*cos(phi_in)+2*sin(phi_in)*sin(phi)*C*cos(phi)*cos(phi_in)*cos(theta)**2-2*sin(phi_in)*cos(phi)*B*sin(phi) *cos(phi_in)*cos(psi)**2+4*sin(phi)*A*cos(psi)*sin(psi)*cos(theta) *cos(phi)*cos(phi_in)**2-2*sin(phi_in)*sin(phi)*B*cos(psi)**2 *cos(theta)**2*cos(phi)*cos(phi_in)-2*C*cos(phi)**2*cos(phi_in)**2 *cos(theta)**2+2*B*cos(phi_in)**2*cos(psi)**2*cos(phi)**2-2 *A*cos(psi)**2*cos(phi_in)**2*cos(phi)**2+A

95
*cos(theta)**2*cos(psi)**2*cos(phi)**2+A*cos(theta)**2*cos(psi)**2*cos(phi_in)**2+C-2*sin(phi_in)*sin(phi)*C*cos(phi)*cos(phi_in)+2*sin(phi_in)*cos(phi)*B *sin(phi)*cos(phi_in)+2*A*cos(theta)**2*cos(phi)**2*cos(phi_in)**2+2*sin(phi_in)*cos(phi)*A*cos(psi)**2*sin(phi)*cos(phi_in)-1*B*cos(psi)**2*cos(theta)**2* cos(phi_in)**2+2*B*cos(psi)**2*cos(theta)**2*cos(phi)**2*cos(phi_in)**2 -4*sin(phi_in)*B*sin(psi)*cos(psi)*cos(theta)*cos(phi)**2*cos(phi_in)+2 *sin(phi_in)*sin(phi)*A*cos(theta)**2*cos(phi)*cos(phi_in)* cos(psi)**2-4*sin(phi)*B*sin(psi)*cos(psi)*cos(theta)*cos(phi)*cos(phi_in)**2;