-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
1/11
A note on Robot-packable and Orthogonal variants of the
three-dimensional bin packing problem
Edgar den Boef, Jan Korst, Silvano Martello, David Pisinger,
Daniele Vigo
Abstract
In the three-dimensional bin packing problem the task is to
orthogonally pack a given
set of rectangular items into a minimum number of
three-dimensional rectangular bins. We
give a characterization of the algorithm proposed by Martello,
Pisinger and Vigo (2000) for
the exact solution of the problem, showing that not all
orthogonal packings can be gener-
ated by the proposed algorithm. The packings however have the
property of being robot
packings, which is of great relevance to the industry. A new
(and correct) algorithm for solv-
ing the general orthogonal packing problem is presented based on
constraint programming.
Extensive computational experiments compare the algorithm for
the three-dimensional bin
packing when solving general orthogonal packings and when
restricted to robot packings.
1 Introduction
In the three-dimensional bin packing problem we are given a set
of n rectangular-shaped items
(boxes) j 12
n, each having a width w j, height h j and depth dj, and an
unlimited number
of identical three-dimensional bins (containers) having width W,
height H and depth D. The task
is to orthogonally pack all the items into a minimum number of
bins. We assume that the items
may not be rotated, i.e., that they are packed with each edge
parallel to the corresponding bin
edge. Such packings will be denoted as general packings.
If additionally it is demanded that the items can be cut out of
the bin through sequential
guillotine cuts (i.e., face-to-face cuts parallel to the faces
of the bin), the packing is said to be
guillotine cuttable. A robot packing is a packing which can be
achieved by successively placing
items starting from the bottom-left-behind corner, and such that
each item is in front of, rightof, or above each of the previously
placed items. The name comes from the fact that robots
used for packing boxes in the industry are equipped with a
rectangular hand parallel to the base
of the bins, which is covered with vacuum cells for lifting the
boxes. To avoid collisions, it is
demanded that no already packed box is positioned in front of,
right of, or above the destination
of the current box.
1
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
2/11
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
3/11
In Martello, Pisinger and Vigo [7], a branch-and-bound algorithm
for the exact solution of
the three-dimensional bin packing problem with general packings
was presented. The algorithm
consists of a main depth-first branching tree in which, at each
node, the current item is repeatedlyassigned to each bin already
containing some items (plus, possibly, to a new bin), without
speci-
fying the actual placements of the items. The feasibility of the
assignment of the current subset
of items to a single bin is checked as follows. First, lower
bounds are computed for the subset: if
one of them gives a value greater than one, the node is
immediately pruned. Otherwise, heuristic
algorithms are executed: if a solution requiring a single bin is
obtained, the node is accepted. If
none of the two cases occurs, the optimal solution for the
sub-instance is determined through a
subroutine ONEBIN: the node is then accepted if a single bin
solution is found, or pruned other-
wise. The ONEBIN algorithm is a constructive branch-and-bound
algorithm which, at each step,
places an item in a feasible point, according to the following
rule (see Property 2 of Martello,
Pisinger and Vigo [7]): each new item is placed such that it is
in front of, right of, or above each
of the previously placed items. More formally, when successively
placing items 1 2 m, for
each pair i j with i j (i.e., item i is placed before item j),
at least one of the following three
equations should be true:xi
wi x jyi
hi y jzi
di z j
(1)
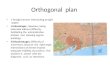
Obviously the packing patterns generated in this way are robot
packable. However, not all
general packings satisfy this property. Indeed, packing (c) in
Figure 1 cannot be achieved by the
ONEBIN algorithm as for items 1, 4, and 9, irrespective of the
order in which they are packed, the
last placed item violates the above property.In Section 2 we
describe an MILP model for the general single-bin packing problem,
based on
the modeling technique proposed by Onodera, Taniguchi and Tamaru
[10] for a two-dimensional
case. The model may also be seen as a specialization of that
proposed by Chen, Lee and Shen
[4] for the multiple-container loading problem. Solving this
model by a standard MILP solver
may replace the ONEBIN procedure in the algorithm, thus making
it possible to solve the general
three-dimensional bin packing problem. Computational
experiments, however, indicated that
solving the model through commercial software (CPLEX 7.0) was
quite time consuming, and
only problems of small size could be solved. Thus, in Section 3,
a new algorithm is proposed
based on constraint programming. Use of domain restriction and
constraint propagation makes
it possible to determine infeasible packings early in the search
tree, resulting in a much better
performing algorithm. In Section 4 we finally compare the two
versions of the algorithm, deal-
ing with general and robot packing, respectively. These
extensive computational experiments,
comprising more than one year of total CPU time, have solved
considerably more instances to
optimality than previously reported in the literature.
2 Formulation of the single-bin packing problem
The decision problem whether a given subset of items fits into a
single bin of size W H D
may be formulated as follows. Let the items be denoted as 1 2 m,
and let us introduce the
3
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
4/11
binary decision variables i j (left), ri j (right), ui j
(under), ai j (above), bi j (behind), fi j (in front)
for items i j with i j. As no two items i j may overlap, we must
demand that they are located
left, right, under, above, behind or in front of each other.
Thus
i j
ri j
ui j
ai j
bi j
fi j 1 i j 1 2 m i j (2)
If just one of the relations is satisfied, no overlap will
occur. However, more than one relation is
allowed, e.g., i j bi j
ai j 1. Ifi is located on the left of j, i.e., i j
1, then we have that
xi
wi x j . In general we get, for i j 1 2 m with i j, the logical
constraints:
i j 1 xi
wi x jri j
1 x j
w j xiui j
1 yi
hi y j
ai j
1
y j
h j yibi j
1 zi
di z jfi j
1 z j
dj zi
(3)
Obviously we must also demand that 0
x j W w j , 0 y j H h j and 0 z j D dj, to
ensure that no part of item j exceeds the bin.
By linearizing (3), the single-bin packing problem can be
formulated as the following MILP
problem. (See, e.g., Mitra et al. [9] for a general discussion
on how logical constraints can be
linearized.)
i j
ri j
ui j
ai j
bi j
fi j 1 i j 1
2
m
i j
xi
x j
W i j W
wi i
j
1
2
m
i
jx j xi
W ri j W w j i j 1 2 m i j
yi y j
Hui j H hi i j 1 2 m i j
y j yi
Hai j H h j i j 1 2 m i j
zi z j
Dbi j D di i j 1 2 m i j
z j zi
D fi j D dj i j 1 2 m i j
0
x j W w j j 1 2 m
0
y j H h j j 1 2 m
0
z j D dj j 1 2 m
i j ri j ui j ai j bi j fi j 0 1 i j 1 2 m i j
(4)
Due to the large number of decision variables, the MILP
formulation (4), however, turned out to
be difficult to solve through commercial software (CPLEX 7.0).
This confirms analogous results
obtained by Chen, Lee and Shen [4] with the original container
loading model. Thus a different
approach based on techniques from constraint programming was
used.
3 A constraint programming approach
Constraint programming has recently been recognized as a
promising tool for solving decision
problems which are difficult to formulate in ILP form (see,
e.g., Brailsford, Potts and Smith [3]).
4
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
5/11
In our problem, the domain of each pair of items i j is Mi j
l, r, u, a, b, f meaning that they
can be placed relative to each other as given by the six
relations. To avoid symmetries, items 1
and 2 have the restricted domain M12
l, u, b
.The problem is solved recursively by an algorithm, called
CSPBIN, where at each iteration
two items i and j are considered, and one of the relations i j
ri j ui j ai j bi j fi j is imposed. The
feasibility of the imposed relations is then checked, and if it
can be proved that no solution exists,
the algorithm backtracks. Otherwise the algorithm calls itself
recursively. If all pairs of items
i
j have been imposed a relation, and a feasible assignment of
coordinates exists, the algorithm
terminates with a positive answer.
The feasibility of a partially ordered problem is checked as
follows. First, the items are
ordered according to the i j and ri j relations. Then, for a
given item j the position x j is defined
as the maximum of xi
wi for all items i located left to item j (while x j is set to 0
if no item
is located left of j). If xj
wj
W for some j then the relations cannot be satisfied. The
algorithm runs in O
n2
time since the topological ordering takes O
n2
time and the assignment
of coordinates can be done in O
n2
as there are O
n2
relations i j, ri j. The same approach is
used for relations ui j ai j and bi j fi j.
To further speed up the solution algorithm, domain restriction
and constraint propagation
is applied. Domain restriction is obtained by the Forward Check
(FC) approach proposed by
Haralick and Elliot [6]. Having chosen a relation between items
i j, we may remove all other
relations from Mi j as we know that only one relation needs to
be chosen.
We use the Mainaining Arc Consistency (MAC) approach proposed by
Gaschnig [5] to prop-
agate the chosen constraints. The MAC algorithm is a more
sophisticated FC algorithm which
at any step keeps the problem arc consistent. The present
problem is arc consistent if for all
possible assignments of a relation between two boxes i and j
there is a feasible assignment of
coordinates to the boxes such that all constraints are
satisfied. If this is not possible then the
relation is removed from the domain of Mi j. In the case where a
domain becomes empty the
problem cannot be satisfied, and we backtrack.
Although the use of MAC means that the time complexity of each
node in the search tree
grows considerably, the number of nodes investigated decreases
correspondingly. Sabin and
Freuder [12] showed that the additional effort ofMAC pays off
when dealing with hard problems.
The MAC strategy is implemented as follows. For each recursive
call ofCSPBIN (i.e., for
each new assignment of a relation) we run through all pairs of
items i and j with
Mi j 2
and
test feasibility of each relation R
Mi j. If the packing becomes infeasible with the additional
relation imposed, the relation is removed from the domain. If Mi
j in this way becomes empty,we may conclude that no feasible
packing can be obtained by following this branch, and thus we
may backtrack in CSPBIN. If only one relation is left in a
domain Mi j then this relation is fixed.
All reductions in the domain achieved by the forward propagation
are pushed to a stack, such
that the domains quickly can be restored upon backtracking from
CSPBIN.
The best performance of algorithm CSPBIN was obtained by sorting
the items according to
non-increasing volume, and then branching on pairs of items
1 2
,
1 3
,
2 3
,
1 4
,
2 4
,
34
,
15
. In this way the largest items were placed relatively to each
other at an early stage
of the algorithm and infeasibility could quickly be detected.
This complies with the Fail First
Strategy proposed by Bartak [1].
5
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
6/11
4 Computational Experiments
The algorithm by Martello, Pisinger and Vigo [7] was modified as
follows. When the actualfeasibility of the assignment of the
current subset of items to a single bin has to be checked,
lower bounds and heuristic algorithms are first executed as
described in Section 1. If they fail in
(respectively) pruning or accepting the node, algorithmCSPBIN is
executed for a final decision on
node acceptance. We refer to the resulting algorithm as the
general packing algorithm, and if the
execution of algorithm CSPBIN is replaced by the execution of
the original algorithm ONEBIN,
we refer to it as the robot packing algorithm.
Both versions of the algorithm were tested on eight classes of
random instances, generated
according to different distributions. The first group of classes
(15) are generalizations of the
instances considered by Martello and Vigo in [8]. The bin size
is W H D 100 and five
types of items are considered. Type 1: w j
1 12
W , h j
2
3H
H , dj
2
3D
D . Type 2: w j
2
3W
W , h j 1
1
2H , dj
2
3D
D . Type 3: w j
2
3W
W , h j
2
3H
H , dj 1
1
2D . Type 4:
w j
1
2W
W , h j
1
2H
H , dj
1
2D
D . Type 5: w j
1 12
W , h j
1 12
H , dj
1 12
D . We
then obtained five classes of instances as follows. For Class
k(k 1 5), each item is of type
k with probability 60%, and of the other four types with
probability 10% each.
The second group of classes (68) is a generalization of the
instances presented by Berkey
and Wang [2]. The bin size is always W H D, with W 10 for Class
6, W 40 for Class
7 and W 100 for Class 8. The item sizes are obtained by
uniformly randomly generating w j,
h j and dj in 1 10 , 1 35 and 1 100 , respectively for the three
classes. The last class (Class
9) are the so-called all-fill problems, obtained by cutting
three bins into smaller parts through
guillotine and non-guillotine cuttings. A complete description
of this class can be found in
Martello, Pisinger and Vigo [7].
For each class, we considered instances of different size, with
n ranging between 10 and
50. The algorithms were implemented in C, and the experiments
were run on a Sun4 Sparc
Ultra-Enterprise 400 MHz. A time limit of 300,000 seconds was
given to each instance, and
10 instances were solved for each class and size of a problem.
The time limit was chosen very
huge in order to solve as many instances as possible to
optimality, as this makes it possible
to evaluate the quality of the bounds in more detail than in
previous papers published on this
subject. All the obtained solutions are available from the
internet at the first authors webpage
( " % ' ) 1 3 ). In the following tables, results for the
general packing algorithm
are presented at the top of the tables, while results for the
robot packing algorithm are given at
the bottom. Both algorithms were run on the same computer, so
the solution times are directlycomparable.
Tables I and II compare the number of instances solved to
optimality using a time limit of
300,000 and 1,000 seconds, respectively. With the huge time
limit, the general version is able to
solve more instances in most of Classes 18, while the robot
packing version is better in Class
9. The better performance for Classes 18 may be explained by the
fact that the general version
has more freedom in arranging the items and thus may find
solutions using fewer bins. In this
way, having tighter upper bounds, the algorithms may terminate
faster as the lower bounds used
by both algorithms are the same. For Class 9, the behavior can
be explained by the fact that the
6
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
7/11
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
8/11
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
9/11
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
10/11
find an optimal solution for more problem instances than
previously presented in the literature,
thus making it possible to study quite large instances with
respect to the quality of upper and
lower bounds (see [11] for more detailed computational results).
The extensive computationalexperiments are also promising from a
different point of view as they show that the solution times
do not grow as fast as one could expect. This could indicate
that in a couple of years we will be
able to systematically solve instances with 50 items to
optimality.
6 Acknowledgements
The first author would like to thank Sun Microsystems for
providing resources for the computa-
tional experiments.
References
[1] R. Bartak (1998), Online Guide to Constraint Programming,
available at
"
'
3
' %
3 '
% .
[2] J.O. Berkey and P.Y. Wang (1987) Two Dimensional Finite Bin
Packing Algorithms,
Journal of the Operational Research Society 38, 423429.
[3] S.C. Brailsford, C.N. Potts and B.M. Smith (1999),
Constraint Satisfaction Problems: Al-
gorithms and Applications, European Journal of Operational
Research 119, 557581
[4] C.S. Chen, S.M. Lee and Q.S. Shen (1995), An Analytical
Model for the Container Load-
ing Problem, European Journal of Operational Research 80,
6876.
[5] J. Gaschnig (1979). Performance Measurement and Analysis of
Certain Search Algo-
rithms Tech. rep. CMU-CS-79-124, Carnegie-Mellon University,
1979.
[6] R.M. Haralick and G.L. Elliot (1980) Increasing Tree Search
Efficiency for Constraint
Satisfaction Problems, Artificial Intelligence 14, 263313.
[7] S. Martello, D. Pisinger and D. Vigo (2000), The
Three-Dimensional Bin Packing Prob-
lem, Operations Research 48, 256267.
[8] S. Martello and D. Vigo (1998), Exact Solution of the
Two-Dimensional Finite Bin Pack-
ing Problem, Management Science 44, 388399.
[9] G. Mitra, C. Lucas, S. Moody and E. Hadjiconstantinou
(1994), Tools for Reformulating
Logical Forms into Zero-One Mixed Integer Programs, European
Journal of Operational
Research 72, 263277.
[10] H. Onodera, Y. Taniguchi and K. Tamaru (1991),
Branch-and-Bound Placement for Build-
ing Block Layout, Proceedings 28th ACM/IEEE Design Automation
Conference, 433439.
10
-
8/7/2019 A note on Robot-packable and Orthogonal variants of the
three dimensions bin packing problem
11/11