Embed Size (px)
Citation preview

November 29, 2004 9:15 01176
Tutorials and Reviews
International Journal of Bifurcation and Chaos, Vol. 14, No. 11 (2004) 3689–3820c© World Scientific Publishing Company
A NONLINEAR DYNAMICS PERSPECTIVE OF
WOLFRAM’S NEW KIND OF SCIENCE.
PART III: PREDICTING THE UNPREDICTABLE
LEON O. CHUA, VALERY I. SBITNEV and SOOK YOONDepartment of Electrical Engineering and Computer Sciences,
University of California at Berkeley,
Berkeley, CA 94720, USA
Received February 15, 2004; Revised June 5, 2004
We prove rigorously the four cellular automata local rules 110, 124, 137 and 193 have identicaldynamic behaviors capable of universal computations. We exploit Felix Klein’s remarkable Vier-
ergruppe to partition the 256 local rules studied empirically by Wolfram into 89 global equivalence
classes of which only 50 may exhibit complex dynamics. We define a 24-element rotation groupwhich induces 30 local equivalence classes of nonlinear difference equations whose parameterscan be mapped into each other among members of the same class.
Keywords : Wolfram; Cellular Automata; universal computation; Turing machine; CNN; cellu-lar neural networks; cellular nonlinear networks; global equivalence classes; symmetry; group-theoretic properties; the Four group; Vierergruppe; nonlinear dynamics.
1. Introduction
To make Part III somewhat self-contained, let usbegin with a brief review of the notations, con-cepts, and main results from Parts I [Chua et al.,2002] and II [Chua et al., 2003]. Throughout this se-ries, we are concerned exclusively with a two-stateone-dimensional cellular automata made of n + 1cells i = 0, 1, 2, . . . , n with a periodic boundarycondition, as shown in Fig. 1(a). Each cell “i” in-teracts only with its nearest neighbors i − 1 andi + 1, as depicted in Fig. 1(b), where ui−1, ui, andui+1 denote the three inputs needed to computethe output yi via a three-input Boolean functionyi = N(ui−1, ui, ui+1) whose truth table is shownin Fig. 1(c), where βk ∈ {0, 1}. There are 256 dis-tinct Boolean functions of three inputs, each onerepresenting one permutation of eight binary bitsin the symbolic Boolean vector
β∆= [β0 β1 β2 · · · β7]
t (1)
where the superscript “t” denotes the transpose op-eration. It is natural therefore to identify each ofthese 256 Boolean functions by its associated deci-mal number
N = β7 • 27 + β6 • 26 + β5 • 25 + β4 • 24
+ β3 • 23 + β2 • 22 + β1 • 21 + β0 • 20
=
7∑
k=0
βk2k (2)
Since the Boolean expansion of any decimal num-ber N = 0, 1, 2, . . . , 255 uniquely identifies one ofthe 256 truth tables via the symbolic Boolean vec-tor β extracted from Eq. (2), the number N serves
the dual role of a local rule number N , and itsassociated truth table.
Rather than taking a local rule as an abstractdiscrete Boolean function out of the blue, Part Ishows that much insight is gained by associatingeach local rule N with an attractor of a CNN
3689

March 7, 2005 10:10 01176
3690 L. O. Chua et al.
Fig. 1. (a) A one-dimensional Cellular Automata (CA) made of (n + 1) identical cells with a periodic boundary condition.Each cell “i” is coupled only to its left neighbor cell (i − 1) and right neighbor cell (i + 1). (b) Each cell “i” is described by alocal rule N , where N is a decimal number specified by a binary string {β0, β1, . . . , β7} βi ∈ {0, 1}. (c) The symbolic truthtable specifying each local rule N , N = 0, 1, 2, . . . , 255. (d) By recoding “0” to “−1”, each row of the symbolic truth tablein (c) can be recast into a numeric truth table, where γk ∈ {−1, 1}. (e) Each row of the numeric truth table in (d) can berepresented as a vertex of a Boolean Cube whose color is red if γk = 1 , and blue if γk = −1.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3691
(cellular neural network) [Chua, 1998] of the same architecture as Fig. 1(a), each of whose cells is a nonlineardynamical system defined by a scalar state equation
xi =(
− xi +(∣∣xi + 1
∣∣−∣∣xi − 1
∣∣))
+{
z2 + c2
∣∣∣
(z1 + c1
∣∣(z0 + b1ui−1 + b2ui + b3ui+1)
∣∣)∣∣∣
}
xi(0) = 0
i = 0, 1, 2, . . . , n .
(3)
and an output equation
yi(Q) = sgn{
z2 + c2
∣∣∣
(z1 + c1
∣∣(z0 + b1ui−1 + b2ui + b3ui+1)
∣∣)∣∣∣
}
(4)
where yi(Q) denotes the steady state output Qof each CNN cell i for each numeric input(ui−1, ui, ui+1) listed in the numeric truth table
shown in Fig. 1(d), which is constructed from thesymbolic truth table in Fig. 1(c) by substituting thesymbol “0” by the real number “−1”, and the sym-bolic binary output βk ∈ {0, 1} in Fig. 1(c) by thenumeric binary output γk ∈ {−1, 1} in Fig. 1(d). Itis important to note that the minor difference be-tween the symbolic and the numeric truth tables ismore than cosmetic. Indeed, by interpreting ui−1,ui, and ui+1 as a real number, rather than just asymbol, we can exploit the powerful theory of non-linear dynamics which is couched in terms of thereal number system.
In particular, for each local rule N =0, 1, 2, . . . , 255, one can specify a set of eight pa-rameters1 {z2, c2, z1, c1, z0, b1, b2, b3} in Eq. (2)such that its trajectory from xi(0) = 0 convergesprecisely to an attractor Q whose output yi(Q)in Eq. (4) generates exactly the numeric truth ta-ble in Fig. 1(d). Another important advantage ofworking with the numeric rather than the symbolictruth table is the remarkable insights provided bythe equivalent Boolean cube representation shown inFig. 1(e) [Chua et al., 2002]. Here, the eight verticesof the cube are located exactly at the coordinates(ui−1, ui, ui+1) listed in the numeric truth table inFig. 1(d) (note the origin “0” of the three coordi-nate axes ui−1, ui and ui+1 in Fig. 1(e) is located at
the center of the cube). The vertex “k” correspond-ing to row “k” of Fig. 1(c) [resp. Fig. 1(d)] is codedblue if βk = 0 (resp. γk = −1), and red if βk = 1(resp. γk = 1), k = 0, 1, 2, . . . 7.
Since we will be using both symbolic and nu-
meric truth tables in the following text, to avoidconfusion, we will sometimes use the symbolic
Boolean vector β defined in Eq. (1) when referringto the symbolic truth table, and to use the numeric
Boolean vector
γ∆= [γ0 γ1 γ2 · · · γ7]
t (5)
when referring to the numeric truth table.
As an example, the colored vertices in Fig. 1(e)correspond to the local rule
N = 0 • 27 + 1 • 26 + 1 • 25 + 0 • 24 + 1 • 23
+ 1 • 22 + 1 • 21 + 0 • 20
= 110 (6)
A quicker way to calculate the local rule number issimply to add the vertex weights of all red verticesindicated in the Boolean cube of Fig. 1(e), namely,
N = sum of weights of vertices ©1 ,©2 ,©3 ,©5 ,©6
= 2 + 4 + 8 + 32 + 64
= 110 . (7)
1There are infinitely many such parameter sets that can be found for each local rule N . Table 4 from [Chua et al., 2003] givesonly one parameter set for the reader to verify.

March 7, 2005 10:10 01176
3692 L. O. Chua et al.
The CNN dynamical system defined by Eqs. (3)and (4) corresponds to only one iteration of a cel-lular automata. Instead of applying conventionalbrute-force calculations on a digital computer, andrepeating it over all n + 1 pixels, we can use aCNN chip [Chua et al., 1998] to obtain the same re-sult via hardware on all pixels simultaneously. This“physical” simulation of the local rule is an exampleof analog computation, and takes only a few nano
seconds (10−9 seconds) on the latest 128×128 CNNchip. To function as a cellular automata, the CNNchip is programmed to execute a single “do loop” in-struction which feedbacks the output of yt
i of eachcell at iteration t back to its input to obtain theoutput yt+1
i at the next iteration t + 1. Using thisnotation (the superscript “t” and “t+1” denote theiteration number from one to the next generation),we can express each local rule N explicitly in theform of a nonlinear difference equation as follows:
ut+1i = sgn
{
z2 + c2
∣∣∣
(z1 + c1
∣∣(z0 + b1u
ti−1 + b2u
ti + b3u
ti+1
)∣∣)∣∣∣
}
(8)
where the eight parameters {z2, c2, z1, c1, z0, b1, b2, b3} for each local rule are given in [Chua et al., 2003].Another important advantage of the Boolean cube representation is that it allows us to define an index
of complexity; namely,
Complexity Index
κ = minimum number of parallel planes needed to separate
the red vertices of Boolean cube N from the blue vertices.
(9)
The complexity index κ of local rule N pro-vides a useful qualitative characterization of N . For
example, all local rules belonging to a given equiv-
alence class to be identified in the following sec-
tions have the same complexity index κ. Most localrules belonging to the Wolfram class 1 [Wolfram,
2002] have complexity index κ = 1. Moreover, all
local rules with complexity index κ = 1 can exhibit
only Wolfram’s class 1 or class 2 behaviors and aretherefore not capable of universal computation. On
the other hand, since local rule 110 , which has
a complexity index κ = 2 [Chua et al., 2002], had
been proved to be universal [Wolfram, 2002], it fol-
lows that κ = 2 represents a threshold of complexity
posed in [Wolfram, 2002].
Yet another important qualitative property of
κ is its correlation with the minimum number αof absolute-value functions required by the Boolean
output equation (4). In particular, the number
“α + 1” is exactly equal to the minimum number
of parallel separating planes [Chua et al., 2002].Hence, all local rules with complexity index κ = 1
can be generated from the following equation with
“α=0” absolute-value functions [Chua et al., 2002]:
κ=1 local rules :
ut+1i =sgn
{z0+b1u
ti−1+b2u
ti+b3u
ti+1
}
(10)
There are 104 local rules with complexity indexκ = 1. They correspond to the class of all linearly-separable Boolean functions [Chua & Roska, 2002].Similarly, there are 126 local rules with complex-
ity index κ = 2. They can be generated from thefollowing nonlinear difference equation with only“1” absolute-value function [Chua et al., 2002],i.e. α = 1:
κ = 2 local rules :
ut+1i = sgn
{z1 + c1
∣∣(z0 + b1u
ti−1
+ b2uti + b3u
ti+1
)∣∣}
(11)

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3693
Only local rules with complexity index κ = 3 requiretwo absolute-value functions, i.e. α = 2, as alreadydefined in Eq. (8).
The patterns generated by the 256 local ruleswith the same initial pattern u0
i consisting of asingle red center pixel have been published in[Wolfram, 2002], and in [Chua et al., 2002].2 Eachpattern has 30 rows and 61 columns. Although
the choice of a single red center pixel as the in-put (initial pattern at t = 0) allows Wolfram touncover many interesting features among the 256local rules, this choice is not sufficiently general touncover more subtle properties, and can be mis-leading. Following Wiener, who had proved that themost general testing input for identifying a nonlin-ear system is the Brownian motion [Wiener, 1958],we have chosen the following 61 random bits
1
49
1
48
0
47
0
46
0
45
0
44
0
43
0
42
0
41
1
40
0
39
1
25
1
24
1
23
0
22
0
21
1
20
1
19
1
18
1
17
1
16
0
15
0
14
0
13
1
12
0
11
1
10
1
9
1
8
1
7
1
6
0
5
0
4
0
3
0
2
1
1
1000101111000001110011010
0262728293031323334353637385051525354555657585960
1
49
1
48
0
47
0
46
0
45
0
44
0
43
0
42
0
41
1
40
0
39
1
25
1
24
1
23
0
22
0
21
1
20
1
19
1
18
1
17
1
16
0
15
0
14
0
13
1
12
0
11
1
10
1
9
1
8
1
7
1
6
0
5
0
4
0
3
0
2
1
1
1000101111000001110011010
0262728293031323334353637385051525354555657585960
(12)
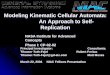
as our initial pattern in generating the follow-ing three figures corresponding to local rules 232
(Fig. 2), 110 (Fig. 3), and 184 (Fig. 4), with com-plexity index κ = 1, 2 and 3, respectively. In eachcase, there are 60 rows and 61 columns in the pat-tern (upper part). The difference equation for gen-erating the truth table is given in the lower part,along with the associated Boolean cube and truth
table representations. The eight-bit colored stringrepresenting each local rule N is also given, alongwith the collection of all three-input patterns corre-sponding to red vertices of the Boolean cube. Theyare called firing patterns in [Chua et al., 2003] be-cause they can be interpreted as the patterns rec-ognized by a particular neuron (with local rule N)and thereby led to its firing of “action potentials”.
2. Local versus Global Equivalence
A cursory inspection of the discrete time evolutionsof the 256 local rules (with a red center pixel) pre-sented in [Wolfram, 2002] and [Chua et al., 2002] re-veals some similarity and partial symmetry amongvarious evolved patterns. Indeed, by partitioningthe 256 local rules into 16 Boolean cube families, itis possible to predict that all local rules belonging toa particular family have identical evolved patternsor geometrical features. For example, all 16 localrule {4, 12, 36, 44, 68, 76, 100, 108, 132, 140, 164,172, 196, 204, 228, 236} belonging to the G4 familylisted in Table 15.5 of [Chua et al., 2003] have anidentical evolved pattern consisting of a one-pixelwide red vertical line in the middle of the pattern.Similarly, all 16 local rules {16, 24, 48, 56, 80, 88,112, 120, 144, 152, 176, 184, 208, 216, 240, 248}
belonging to the G16 family listed in Table 15.9 of[Chua et al., 2003] have an identical evolved patternconsisting of a one-pixel wide red inclined straightline starting from the center red pixel.
Unfortunately, the above observations are trueonly if the initial pattern u0
i consists of one red cen-ter pixel. A different initial pattern will give riseto different evolved patterns among members of thesame family. Nonetheless, the evolved patterns seemto be related by some geometrical transformations.
Conversely, the Boolean cubes of many differ-ent pairs of local rules listed in Table 1 of [Chuaet al., 2003] seem to be related by some transforma-tions, such as complementation of the vertex colors(e.g. rules 145 and 110). Yet, their evolved patternsare so different that it is impossible to relate them.How do we make sense of all these observations?
Let us examine the evolved patterns of thetwo local rules 145 and 110 from Table 5 of[Chua et al., 2003] which we reproduce in the upperpart of Fig. 5. Note that their associated Booleancubes, as well as their symbolic Boolean vectorsβ[145] and β[110] are related by a simple Booleancomplementation, namely, the “red ↔ blue vertextransformation” defined in [Chua et al., 2002]. Wewill henceforth denote this transformation by TC ,and rename it as local complementation operationin this paper, in order to distinguish it from theglobal complementation operation to be defined inthe next section. Using this notation, we can write
145TC
−→ 110 and β[145]TC
−→ β[110] (13)
Intuitively, one might expect that their respectiveevolved patterns must also be related by a simple
2The black and white pixels in [Wolfram, 2002] are colored in red and blue in [Chua et al., 2002], respectively.

March 7, 2005 10:10 01176
3694 L. O. Chua et al.
Fig. 2. Evolution of the local rule 232 from a random initial pattern (row 1). Size of array: 60 rows × 61 columns.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3695
Fig. 3. Evolution of the local rule 110 from a random initial pattern (row 1). Size of array: 60 rows × 61 columns.

March 7, 2005 10:10 01176
3696 L. O. Chua et al.
Fig. 4. Evolution of the local rule 184 from a random initial pattern (row 1). Size of array: 60 rows × 61 columns.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3697
Fig. 5. A comparison of the evolution of the two local rules 110 and 145 (with a single red center-pixel initial pattern) inthe upper page with that of local rules 145 and 137 (with a complementary blue center-pixel initial pattern) in the lower pagereveals a global complementary relationship between the patterns of local rules 137 and 110.

March 7, 2005 10:10 01176
3698 L. O. Chua et al.
complementation operation, an intuition that turnsout to be wrong, upon comparing the two evolvedpatterns in the upper part of Fig. 5. Our intuitionmay suggest that perhaps the initial input u0
i for
rule 145 should have been the complement of that
used for rule 110 (i.e. a blue center pixel amidst allred neighbors), as shown in the bottom left of Fig. 5.But once again, a comparison shows the output pat-tern to have no correlation with that of rule 110in the upper right of Fig. 5. On closer examination,however, we will find that our intuition is actuallycorrect but for only one iteration (row 2). Indeed,starting from the same initial pattern (single redcenter pixel) in the first row, we find the output(first iteration) of rule 145 is in fact the comple-
ment of that of rule 110 ; namely, two blue pixels
for 145 and two red pixels for 110 at correspond-ing locations to the left of center. All other pixelsat corresponding locations are also complements ofeach other. In fact, this one-iteration complementa-tion property is true for all 127 local complemen-tary pairs of local rules listed in Table 12 of [Chuaet al., 2002].
However, the next iteration (row 3) under rules145 and 110 in Fig. 5 are not complements of eachother. The reason is that unlike the initial inputu0
i , i = 0, 1, 2, . . . , n, which are the same for both
145 and 110 , the next input uti = u1
i (for t = 1),i = 0, 1, 2, . . . , n (row 2) needed to find the nextiteration (row 3) are different and there is no reasonfor the output ut
i = u2i (for t = 2) at corresponding
locations to be the complement of each other. Ourintuition fails because the input u1
i for 145 and
110 , though different, are complements of eachother. An examination of the vertex numbers in theBoolean cube in Fig. 1 will reveal that complement-ing the input of u1
i is equivalent to exchanging the
position of two diagonally-opposite (connected by animaginary line through the center of the cube) ver-tices. Since an interchange of these two vertices does
not guarantee the resulting color of the correspond-ing vertex pairs of 145 and 110 will have com-plementary colors, the output pattern u2
i (row 3) of
145 and 110 will in general not be a complementof each other, except for the special case where theBoolean cube exhibits certain symmetries in theirvertex colors. Hence our intuition fails because ofthe coincidental appearance of two complementaryoperations, one involving changing the color of allvertices of the Boolean cube, the other involving
switching the position of three pairs of diagonally-opposite vertices. This latter operation could nothave been uncovered without the Boolean cube
representation. Indeed, we will see that all subse-quent results in the sequel could not have beendiscovered without exploiting the group-theoreticproperties of the Boolean cubes!
It follows from the above observations thateach pair of local rules listed in Table 12 of [Chuaet al., 2002] are equivalent only in a local sense,where “local” here means “local in iteration time”,and not local in the usual sense of a spatial neigh-borhood. Since Sec. 4 will present many more equiv-
alent transformations of local rules which also havelocal significance only, we will formalize this notionas follows:
Definition 1. Local Equivalence. Two local rulesN and N ′ are said to be locally equivalent under atransformation T : N → N ′ iff the output u1
i ofN after one iteration of any initial input patternu0
i can be found by applying the transformed inputT[u0
i ] to rule N ′ and then followed by applying theinverse transformation T−1 : N ′ → N to u1
i .
Let us examine next the evolved patterns forthe local rule 137 in the lower-right portion of
Fig. 5, as well as the two local rules 124 and 193in the left column of Fig. 6. Despite the fact that therespective Boolean cubes of these three rules do notseem to be related in an obvious way, yet their out-put patterns are so precisely related that one couldpredict the evolved pattern over all times t of eachlocal rule N ∈ {137, 193, 124, 110} from the otherthree rules! For example, the evolved output pat-tern of rule 124 can be obtained by a reflection of
that of 110 about the center line, namely, a bilat-
eral transformation. Next, the output of rule 193can be obtained by applying the complement u0
i ofu0
i (i.e. blue center pixel amidst a red background)
to rule 110 and then taking the complement of the
evolved pattern from 110 . Finally, the output of
rule 137 can be obtained by repeating the above
algorithm for 193 , and then followed further bya reflection about the center line. Even more sig-nificant is the fact (to be proved in Sec. 3) thatthese algorithms remain valid for all initial inputpatterns, as demonstrated in Fig. 7 with the randominitial pattern given earlier in Eq. (12). This resultis most remarkable because it allows us to predictthe evolved patterns of three local rules over all

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3699
Fig. 6. The evolutions of local rules 124 and 110 (with a red center-pixel initial pattern) in the upper page reveals a global
left–right (bilateral) symmetrical relationship. Those in the lower page (with a complementary bilateral initial pattern) alsoreveals a global complementary bilateral relationship between local rules 193 and 110.

March
7,2005
10:1001176
Fig. 7. The four local rules {193, 137, 124, 110} are globally equivalent to each other in the sense that their long-term (as t → ∞) dynamics are mathematicallyidentical, modulo a bijection. All four patterns have 60 rows corresponding to iteration numbers t = 0, 1, 2, . . . 59, and 61 columns, corresponding to 61 cells (n = 60).
All patterns have a random initial condition (t = 0), as specified in Eq. (12), or its reflection, complementation, or both. The two patterns 124 and 110 on top are
generated by a left–right transformation T†, and are related by a bilateral reflection about an imaginary vertical line situated midway between the two patterns. The
two patterns 193 and 137 below are likewise related via T† and exhibit the same bilateral reflection symmetry. The two vertically situated local rules 137 and
110 , as well as 193 and 124 are related by a global complementation T. The two diagonally-situated local rules 124 and 137 , as well as 193 and 110 arerelated by a left–right complementation T
∗.
3700

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3701
iterations (not just one iteration as in the preced-ing example) from a single local rule, a truly global
result! This unique global property is stated for-mally as follows:
Definition 2. Global Equivalence. Two local rulesN and N ′ are said to be globally equivalent under atransformation T : N → N ′ iff the output ut
i of Ncan be found, for any t, by applying the transformedinput T[u0
i ] to local rule N ′ and then followed byapplying the inverse transformation T−1 : N ′ → Nto u1
i , for any t = 1, 2, . . . .
3. Predicting the Unpredictable
In the preceding section we have demonstrated, viaexamples, that the four local rules {193, 137, 124,110} are globally equivalent in the sense that theevolved patterns of any three members of this classcan be trivially predicted from the fourth for all iter-ations. In other words, these four rules have identi-
cal nonlinear dynamics for all initial input patternsand therefore they represent only one generic rule,henceforth called an equivalence class [Hamermesh,1962]. We will prove this global property in Sec. 3.3not only for these four rules, but also for all localrules, thereby allowing us to partition the 256 localrules into only 89 global equivalence classes, eachmade up of two or four local rules. For example,Fig. 8 shows another global equivalence class madeup of the four local rules {149, 135, 86, 30} all ofwhich have a complexity index κ = 2, and Fig. 9shows an equivalence class made up of only the twolocal rules {226, 184} all of which have a complex-ity index κ = 3 in view of certain symmetry of theBoolean cubes belonging to this class. This result issignificant because it asserts that one only needs tostudy in depth the dynamics and long-term behav-iors of 89 representative local rules. Moreover, since39 among these 89 dynamically distinct local ruleshave a complexity index κ = 1, and are thereforetrivial, we are left with only 50 local rules (41 ruleswith κ = 2 and 9 rules with κ = 3) that justifyfurther in-depth investigations.
We will also prove in Sec. 3.3 that these arethe only possible global equivalence classes; all otherequivalence classes, including those to be presentedin Sec. 4, must therefore necessarily be local.
Since rule 110 has been proven to be capableof universal computation [Wolfram, 2002], it followsthat it is impossible to predict the global (long term)behaviors of rule 110 for arbitrary initial input pat-terns. We can, however, predict rigorously that thethree local rules 193, 137, and 124 are also unpre-
dictable, hence the title of this section.
3.1. Partitioning 256 local rules into
89 global equivalence classes
It will be proved in Sec. 3.3 that every local rulebelongs to a global equivalence class containing ei-ther two or four distinct local rules, as tabulated inTable 1. Each rule has three globally equivalent lo-cal rules3 determined by three corresponding global
transformations, namely, left–right transformation
T†, global complementation T, and left–right com-
plementation T∗. These transformations will be de-fined in Sec. 3.2 along with a proof of their globalequivalence property in Sec. 3.3. Due to certainsymmetries exhibited by some Boolean cubes, someof these transformations may map a Boolean cubeinto only one instead of three Boolean cubes, asmanifested by the repeated local rules in some rowsof Table 1. The distinct local rules in each row ofTable 1 constitutes a global equivalence class whosedynamics and evolved patterns over all discretetimes t = 1, 2, . . . are distinct from all other lo-cal rules. Since some rows in Table 1 contain onlytwo distinct rules, there are altogether 89 (andnot 64) distinct global equivalence classes. Amongthem 39 have a complexity index κ = 1. They areidentified by the symbol εκ
m, where κ = 1 andm = 1, 2, . . . , 39 and are listed in Table 2. There are41 global equivalence classes with complexity indexκ = 2. They are identified by ε2
m, m = 1, 2, . . . , 41,and listed in Table 3. There are nine global equiv-alence classes with complexity index κ = 3. Theyare identified by ε3
m, m = 1, 2, . . . , 9, and listed inTable 4.
Combing through the data in Table 1 we canidentify 176 local rules each of which is globallyequivalent to two other distinct local rules. Theyare listed in Table 5. We can also identify 72 localrules each of which is globally equivalent to only oneother local rule. They are listed in Table 6. There
3As will be shown below, not all local rules generated by these three transformations are distinct because some local rulesmay be fixed points of one or more of these three transformations. For example, the two globally equivalent rules 226 and
184 displayed in Fig. 9 are both fixed points of the transformation T∗.

March
7,2005
10:1001176
Fig. 8. The same illustration and interpretation as those of Fig. 7 but applied to the four globally equivalent local rules {149, 135, 86, 30}.
3702

March
7,2005
10:1001176
Fig. 9. The same illustration and interpretation as those of Fig. 7 but applied to the two globally equivalent local rules {226, 184}. Even though there are only twodistinct local rules, they generate four distinct patterns since their initial conditions are distinct, albeit related by T
†, T, and T∗.
3703

March 7, 2005 10:10 01176
3704 L. O. Chua et al.
Table 1. Table of globally equivalent local rules. All local rules in each row are globally equivalent to eachother. Rows with red, blue or green background colors denote local rules with a complexity index κ = 1, 2 or 3,respectively.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3705
Table 1. (Continued )

March 7, 2005 10:10 01176
3706 L. O. Chua et al.
Table 2. List of 39 global equivalence classes ε1m of local rules with complexity index κ = 1, m = 1, 2, . . . , 39.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3707
Table 3. List of 41 global equivalence classes ε2m of local rules with complexity index κ = 2, m = 1, 2, . . . , 41.

March 7, 2005 10:10 01176
3708 L. O. Chua et al.
Table 4. List of nine global equivalence classes ε3m of local rules with complexity
index κ = 3, m = 1, 2, . . . , 9.
are eight local rules possessing a three fold sym-metry such that all three transformations T†, T,and T∗ map each member of this group onto it-self. In other words, these eight local rules are truly“loners” as they are not globally equivalent to anyother local rule. They are listed in Table 7.
Some local rules are fixed points of one or moreglobal transformations. In particular, Table 8 lists64 local rules which are fixed points of the left-right
transformation T†, i.e. N = T†[N ]. Table 9 lists 16local rules which are fixed points of the global com-
plementation T, i.e. N = T[N ]. Table 10 lists 16local rules which are fixed points of the left–right
complementation T∗, i.e. N = T∗[N ]. Some localrules are fixed points of two or more global trans-formations. For example, Table 11 lists eight local
rules which are fixed points of both T and T∗. Itis interesting to observe that the same eight localrules above are also fixed points of T†, as listedin Table 12.
3.2. The Vierergruppe V: Key for
defining global transformations
T†, T, and T∗
The three global transformations T†, T, and T∗
cited extensively in the preceding section and inTable 1 are generated from elements of the classicnoncyclic four-element Abelian group V, originallycalled the Vierergruppe by the great mathematicianFelix Klein.4 The four elements of V are denoted by
T0, T†u, Tu, and T∗
u in this paper and are defined in
4There are only two finite abstract groups of four elements. One is a cyclic group and the other is the Vierergruppe V (alsoknown in the western literature as the Four group). Both are Abelian. The symbol V generally chosen to denote this groupcomes from the first letter of Vierergruppe.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3709
Table 5. List of 176 local rules endowed with three distinct globally-equivalent localrules.

March 7, 2005 10:10 01176
3710 L. O. Chua et al.
Table 6. List of 72 local rules endowed with only one distinct globally-equivalent localrule.
Table 7. List of eight local rules endowed with zero globally-equivalent local rule.
Table 8. Σ†: 64 local rules which are fixed points of T†, i.e. N = T
†(N).

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3711
Table 9. Σ: 16 local rules which are fixed points of T, i.e. N = T(N).
Table 10. Σ∗: 16 local rules which are fixed points of T∗, i.e. N = T
∗(N).
Table 11. Σ∗: Eight local rules which are fixed points of T and T
∗,i.e. N = T(N) = T
∗(N).
Table 12. Σ∗† : Eight local rules which are fixed points of T
†, T and T∗,
i.e. N = T∗(N) = T(N) = T
∗(N).
Table 13 by 3 × 3 matrices. Throughout this pa-per the symbol T0 denoted the identity, or unit
matrix, of any dimension. The three nonunit ma-
trices T†u, Tu, and T∗
u are called left–right trans-
formation, global complementation, and left–right
complementation, respectively, in view of their geo-metrical interpretations to be presented below. Ob-
serve that the three matrices T†u, Tu, and T∗
u differ
from the three global transformations T†, T, andT∗ by a subscript “u”. When referring to all three
transformations, we will use the generic symbol T′u
and T′, respectively, where the prime “′” representseither “†”, “−”, or “*”. The proof that these fourelements form an Abelian group under matrix mul-
tiplication is given in Table 14.
Each of the three matrices T†u, Tu, and T∗
u
transforms the three axes (ui−1, ui, ui+1), drawnthrough the center of the Boolean cube in Fig. 1,into a transformed set of axes (u′
i−1, u′i, u′
i+1);namely,
0 0 1
0 1 0
1 0 0
︸ ︷︷ ︸
T†u
ui−1
ui
ui+1
︸ ︷︷ ︸
u
=
ui+1
ui
ui−1
︸ ︷︷ ︸
u′
⇒
Left–Right transformation T†u
u′i−1 = ui+1
u′i = ui
u′i+1 = ui−1
(14)

March 7, 2005 10:10 01176
3712 L. O. Chua et al.
Table 13. Elements of the Vierergruppe V.
Table 14. Multiplication table for the unique cellular automata global equivalence group V.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3713
−1 0 0
0 −1 0
0 0 −1
︸ ︷︷ ︸
Tu
ui−1
ui
ui+1
︸ ︷︷ ︸
u
=
−ui−1
−ui
−ui+1
︸ ︷︷ ︸
u′
⇒
Global complementation Tu
u′i−1 = −ui−1
u′i = −ui
u′i+1 = −ui+1
(15)
0 0 −1
0 −1 0
−1 0 0
︸ ︷︷ ︸
T∗u
ui−1
ui
ui+1
︸ ︷︷ ︸
u
=
−ui+1
−ui
−ui−1
︸ ︷︷ ︸
u′
⇒
Left–Right complementation T∗u
u′i−1 = −ui+1
u′i = −ui
u′i+1 = −ui−1
(16)
3.2.1. Geometrical interpretation of T†u
An examination of Eq. (14) defining the left–right
transformation T†u shows that this operation merely
switches the two horizontal axes ui−1 and ui+1.This means that operating a Boolean cube N byT
†u is equivalent to switching the two pairs of ver-
tices {©4 , ©6 } on the left and {©1 , ©3 } on the right
in the Boolean cube N to obtain a transformedBoolean cube N ′ = T
†u(N). An example of this
simple transformation is shown in Fig. 10 for thelocal rule N = 124, where T
†u(124) = 110. Observe
that since (T†u)−1 = T
†u, the transformation T
†u is
its own inverse. Consequently, T†u(110) = 124. An
examination of Fig. 10 reveals that the left–right
transformation T†u is equivalent to a reflection of
the Boolean cube about the diagonal plane pass-ing through vertices {©0 , ©5 , ©7 , ©2 }. This bilateral
(mirror) symmetry is also reflected in the super-script notation “†”.
The above geometrical interpretation pertainsonly to the 3 × 3 left-right transformation ma-
trix T†u. We now define the corresponding global
left–right transformation T† (without the subscript
u) by augmenting T†u with the output variable yi,
which represents the color of the vertices as follow:
0 0 1 0
0 1 0 0
1 0 0 0
0 0 0 1
︸ ︷︷ ︸
T†
ui−1
ui
ui+1
yi
︸ ︷︷ ︸
(u,yi)
=
ui+1
ui
ui−1
yi
︸ ︷︷ ︸
(u′,y′i)
⇒
Left–Right transformation T†
u′i−1 = ui+1
u′i = ui
u′i+1 = ui−1
y′i = yi
(17)
Observe that T† is a 4×4 matrix, and (T†)−1 = T†.To avoid clutter, we show only the symbol T† map-ping 124 to 110 , and vice-versa, in Fig. 10.
3.2.2. Geometrical interpretation of Tu
An examination of Eq. (15) defining the global com-
plementation Tu shows that this operation merelymultiplies the coordinates of each vertex of theBoolean cube by −1. This means that operatinga Boolean cube N by Tu is equivalent to switchingthe four pairs of vertices {©0 , ©7 }, {©1 , ©6 }, {©2 ,
©5 }, and {©3 , ©4 } located along the four imag-inary diagonal lines through the center of theBoolean cube. For example, suppose N = 137,then Tu(137) = 145, which is precisely the enigmawe posed in Fig. 5 of Sec. 2: why is the out-
put pattern of 145 (shown in the upper-left handcorner of Fig. 5) not the complement of that of110 when the colors of the corresponding ver-
tices of 145 and 110 are complements of eachother? The answer is now clear: we must not
only switch the diagonal vertex pairs, as above,

March
10,2005
17:5
01176
Fig. 10. Definition of the 3 × 3 matrix T†u whose action is to switch the position of vertices {©4 , ©6 } on the left of the Boolean cube 124 with the corresponding
vertices {©1 , ©3 } on the right to obtain the Boolean cube 110 . The lower diagram shows the corresponding global transformation T† (without the subscript u) instead
of T†u, which in this case makes no difference in the transformed Boolean cube.
3714

March
10,2005
17:1
601176
Fig. 11. Definition of the 3 × 3 matrix Tu whose action is to exchange the four pairs of diagonally opposite vertices i.e. {©0 → ©7 ′, ©7 → ©0 ′}, {©1 → ©6 ′, ©6 → ©1 ′},{©2 → ©5 ′, ©5 → {©2 ′}, {©3 → ©4 ′, ©4 → ©3 ′}. The lower diagram shows the result after a further local complementation operation which changes the colors of all vertices
of Tu
(
137)
= 145 to obtain 110 .
3715

March
10,2005
17:1
601176
Fig. 12. Definition of the 3 × 3 matrix T∗u
whose action is to perform first a left–right transformation T†u and then followed by a global complementation Tu. The
lower diagram shows the result after a further local complementation operation which changes the colors of all vertices of Tu(T†u( 193 )) = Tu( 137 ) = 145 to
obtain 110 .
3716

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3717
Fig. 13. Applying the global complementation T to rule 137 involves two separate steps: Step 1 switches the four pairs of
vertices located along the four diagonals through the center of the cube 137 to obtain 145 . Step 2 changes the color of all
vertices of 145 to their complements to obtain 110 .
but must also follow this with the intermediate operation T†u by changing the colors of the vertices to their
complementary colors, as illustrated in Fig. 13. It follows that the global complementation T must bedefined as follows:
−1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 −1
︸ ︷︷ ︸
T
ui−1
ui
ui+1
yi
︸ ︷︷ ︸
(u,yi)
=
−ui−1
−ui
−ui+1
−yi
︸ ︷︷ ︸
(u′,y′i)
⇒
global complementation T
u′i−1 = −ui−1
u′i = −ui
u′i+1 = −ui+1
y′i = −yi
(18)
Observe that the complement operation in row 4 of T is equivalent to applying the local “red–blue”complementation operator TC defined in Sec. 2. To avoid clutter, Fig. 11 omits this intermediate operationand shows the global transformations T mapping 137 to 110 , and vice-versa.
3.2.3. Geometrical interpretation of T∗u
An examination of Eq. (16) defining the left–right complementation T∗u shows that this operation is equiv-
alent to the composition of two operations T†u and Tu, as illustrated in Fig. 14(a) for rule 193 , namely,
T∗u(193) = T
u(T†
u(193)) = 145 . To obtain the desired global left–right complementation T∗ (without the
subscript u) requires that we follow up the above composition T∗u = Tu ◦ T
†u by a local complementation
operation TC as follows:
0 0 −1 0
0 −1 0 0
−1 0 0 0
0 0 0 −1
︸ ︷︷ ︸
T∗
ui−1
ui
ui+1
yi
︸ ︷︷ ︸
(u,yi)
=
−ui+1
−ui
−ui−1
−yi
︸ ︷︷ ︸
(u′,y′i)
⇒
left–right complementation T∗
u′i−1 = −ui+1
u′i = −ui
u′i+1 = −ui−1
y′i = −yi
(19)

March
7,2005
10:1001176
(a)
(b)
Fig. 14. (a) Mapping 193 to 110 via left–right complementation is equivalent to a triple composition TC ◦ Tu ◦ T
†u of T
†u, Tu, and T
C . (b) An equivalent route
for mapping 193 to 110 is via a composition T†u ◦ T
C ◦Tu of Tu, TC and T
†u.
3718

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3719
Applying the local complementation TC to 145 in
Fig. 14(a) results in the desired rule 110 . Again,observe that (T∗)−1 = T∗. To avoid clutter, Fig. 12omits the two intermediate operations and showsthe left–right complementation T∗ mapping 193
to 110 , and vice-versa.Figure 15 shows a diagram relating the three
global transformations T†, T and T∗. Observe thisdiagram is commutative, namely, every pair fromthese three transformations are related by two dis-tinct routes. For example, we can map 193 to
110 via the alternate “composition” route shownin Fig. 14(b). This “commutation property” followsof course from the definition of an Abelian group.
3.3. Proof of global equivalence
By choosing the random pattern from Eq. (12) asour initial condition in Figs. 7–9, we have proved,
albeit with the help of a computer, that the reflec-
tion relationship between rules 124 and 110 , the
complementary relationship between rules 137 and
110 , as well as the complementary reflection re-
lationship between rules 193 and 110 , are notflukes, but global invariant properties shared bythese three rules alone.5 Since the global dynamicbehaviors (over all time iterations) of the four lo-cal rules {193, 137, 124, 110} can be predicted fromany member of this family, they form an equivalence
class in a strict mathematical sense. By carrying outthis brute force exercise via a computer to all 256local rules, we have identified the other members ofthe unique equivalence class represented by all 256local rules listed in the left column of Table 1, alongwith the global transformation T†, T or T∗ rele-vant in this mapping. Since random input patternsrepresent the most general probing signals, we haveproved, with the help of a computer, the followingthree fundamental theorems of cellular automata6:
Theorem 1 (Reflection Invariance Theorem). The bilateral reflectionsymmetry between corresponding evolved patterns from any pair of local
rules {β, β′}, where β′ ∆= T†(β), is preserved under left–right transforma-
tion T†.
Theorem 2 (Complementation Invariance Theorem). The complementa-tion symmetry between corresponding evolved patterns from any pair of local
rules {β, β′}, where β′ ∆= T(β), is preserved under global complementation
T.
Theorem 3 (Reflection Plus Complementation Invariance Theorem). The
bilateral reflection plus complementation symmetry between corresponding
evolved patterns from any pair of local rules {β, β′}, where β′ ∆= T∗(β), is
preserved under left–right complementation T∗.
Since the preceding three theorems representfundamental global results,7 we will now present ananalytical proof. Observe that the three matrices
T†u, Tu and T∗
u defined in Table 13 have nonzero
entries only along the main diagonal, or alongthe reflected diagonal. Moreover, these nonzero en-tries are identical, either 1 or −1. These special
5Brute force computer simulations using the same random initial pattern for all other rules confirmed that no other rulesshare such a unique global relationship with the four rules {193, 137, 124, 110}.6A bilateral reflection means reflection with respect to a vertical line symmetrically located between two patterns.7These global results can be generalized to two-dimensional CA and CNN as well.

March
7,2005
10:1001176
Fig. 15. Diagram defining the three global transformations T†, T and T
∗ are illustrated by the four local rules {193, 137, 124, 110} belonging to the global equivalence
class ε23 displayed in Table 3. Observe that T
†, T and T∗ are 4 × 4 matrices. While T
† and T†u differ only in a trivial way, T and T
∗ differ from Tu and T∗u by a
further composition operation via the local complementation TC , which is equivalent to changing the colors of all vertices of Tu(N) and T
∗u(N).
3720

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3721
symmetry constraints allow us to define these matri-ces analytically as follows (n = 3 for a 3×3 matrix)
T†n
T†ni,j = 1, if i + j = n + 1
= 0, if otherwise
i, j = 1, 2, . . . , n
(20)
Tn
Tni,j= −1, if i = j
= 0, if otherwise
i, j = 1, 2, . . . , n(21)
T∗n
T∗ni,j
= −1, if i + j = n + 1
= 0, if otherwise
i, j = 1, 2, . . . , n(22)
Observe that Eqs. (20)–(22) define an n×n matrix
for any n. When n = 3, we simply substitute n∆= u.
Observe that these three matrices are identical totheir respective inverse:
(T†n)−1 = T†
n , (Tn)−1 = Tn , (T∗n)−1 = T∗
n
(23)
Now consider an initial pattern
uI(0) = [un(0)un−1(0)un−2(0) · · · u2(0)u1(0)u0(0)]t
(24)
at t = 0 for a one-dimensional CA [Fig. 1(a)] withI cells, where I = n + 1, and its evolved pattern
uI(t) = [un(t)un−1(t)un−2(t) · · · u2(t)u1(t)u0(t)]t
(25)
at any iterate t > 0. Using the above notations,observe that row “t” of the four patterns in Fig. 7
are related by T†61, T61, and T∗
61, respectively, fort = 0, 1, 2, . . . , where I = 61 since each row in thesefigures has 61 cells:
u124
61 (t) = T†61u
110
61 (t) (26)
u137
61 (t) = T61u110
61 (t) (27)
u193
61 (t) = T∗61u
110
61 (t) (28)
t = 0, 1, 2, . . . , 59 (since there are 60 rows in thesepatterns). To prove that the above transformationsare true not only for all iterates t = 0, 1, 2, . . . , butalso for all corresponding pairs of local rules listed inTable 1, we recall that Eqs. (20)–(22) do not dependon the value of n. Hence, even though Tu and T61
are different transformations (Tu is a 3 × 3 matrixwhereas T61 is a 61× 61 matrix) involving differentinput spaces R
3 and R61, respectively, the trans-
formed pattern T†uu3(t), Tuu3(t), and T∗
uu3(t) is a
subset of T†61u61(t), T61u61(t), and T∗
61u61(t), re-spectively, where u3(t) denotes any one of the eightrows (ui−1, ui, ui+1) in Fig. 1(d). It follows that
each of the three operators T†u, Tu and T∗
u mustmap β = [β0 β1 β2 · · · β7]
t of each truth table N inFig. 1(c) onto β′ = [β′
0 β′1 β′
2 · · · β′7]
t of another truthtable N ′ via a unique 8 × 8 matrix; namely,8
β′ = Bβ (29)
where the hat “ ˆ ” denotes “†”, “−”, or “∗”, re-spectively. To derive an explicit expression for B,let us define the following two matrices represent-ing the “pink” entries from the symbolic truth tablein Fig. 1(d):
U∆=
−1 −1 −1
−1 −1 1
−1 1 −1
−1 1 1
1 −1 −1
1 −1 1
1 1 −1
1 1 1
,
U t ∆=
−1 −1 −1 −1 1 1 1 1
−1 −1 1 1 −1 −1 1 1
−1 1 −1 1 −1 1 −1 1
(30)
Observe that
P∆= U tU =
8 0 0
0 8 0
0 0 8
= 8I (31)
8We remind the reader that for the two transformations Tu and T∗u, β′ must be further complemented via T
C as imposedby the definitions of Tu and T
∗u in Fig. 15. See Fig. 14(a) for an example. To avoid clutter, we will henceforth use the same
symbol β for both symbolic and numeric truth tables from Fig. 1. Any calculation involving real numbers must use γ insteadof β.

March 7, 2005 10:10 01176
3722 L. O. Chua et al.
where I denotes the identity matrix. Observe thatthe matrix
Q∆= UU t
=
3 1 1 −1 1 −1 −1 −3
1 3 −1 1 −1 1 −3 −1
1 −1 3 1 −1 −3 1 −1
−1 1 1 3 −3 −1 −1 1
1 −1 −1 −3 3 1 1 −1
−1 1 −3 −1 1 3 −1 1
−1 −3 1 −1 1 −1 3 1
−3 −1 −1 1 −1 1 1 3
(32)
is very different from the matrix P. In particular,Q is not sparse; each element is equal to −3, −1,
+1, or +3. Moreover
Qt = (UU t)t = (U t)tU t = UU t = Q (33)
and
Q =1
8n−1Qn , n = 1, 2, 3, . . . (34)
Hence, Q is both symmetric and self-similar. Cal-culating the determinants of P and Q we obtain
det[P] = 512 , det[Q] = 0 (35)
It follows from Eq. (35) that Q does not have aninverse. However, the traces of both P and Q areequal; namely,
trace[P] = trace[Q] = 3 × 8 = 24 (36)
Each component of the two Boolean vectors β of Nand β′ of N ′ can be calculated from Eq. (8), namely;
βl =1
2
(
1 + sgn[
z2 + c2
∣∣∣
(z1 + c1
∣∣(z0 + (b • ul))
∣∣)∣∣∣
])
(37)
and
β ′k =
1
2
(
1 + sgn[
z2 + c2
∣∣∣
(z1 + c1
∣∣z0 + (b • Tuuk)
∣∣)∣∣∣
])
(38)
for all l, k = 0, 1, 2, . . . , 7. It follows from Eq. (29) that Eq. (38) can be expressed in following componentfrom
β′k =
7∑
l=0
Bk,l • βl (39)
It can be shown that each element Bk,l of the 8 × 8 matrix B can be calculated from the elements of the
3 × 3 matrix Tk via the following rather remarkable formula:
Bk,l =1
2
(
1 + sgn
[2∑
i=0
2∑
j=0
Uk,iTtu,(i,j)U
tj,l − 2
])
(40)
Similarly, the elements of the 3 × 3 matrix Tu canbe calculated from the elements of B via the inverseformula
Tu,(i,j) =1
8
7∑
k=0
7∑
l=0
U ti,kB
tk,lUl,j (41)
The denominator 8 in Eq. (41) comes from the diag-
onal element of the matrix P = U tU in Eq. (31). In
contrast the 8× 8 matrix B comes from the nonlin-
ear function sgn[(UTtuU
t)k,l−2]. To understand the
origin of the nonlinearity and the mysterious con-
stant 2 in Eq. (40), let us multiply the 3× 3 matrix
Tu in Eq. (41) by U from the left, and by U t from

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3723
the right:
UTuUt =
1
8UU tBtUU t =
1
8QBtQ (42)
Taking the transpose of both sides, we obtain
(UTuUt)t = UTt
uUt =
1
8QBQ (43)
Since Q is symmetric, any differences betweenEqs. (42) and (43) must come from B. Multiplyingthe matrix B by the same matrix Q on each side andthen dividing the result by 8 gives rise to a distribu-tion of the matrix elements among the four possiblevalues −3, −1, +1, and +3, in view of Eq. (34). Inorder to eliminate the unnecessary matrix elementsin the derivation of the closed-form formula givenin Eq. (40), it is necessary to subtract the number
2 from (UTtuU
t)k,l and to make use of the nonlin-ear sgn[•] function to eliminate all elements having
values less than 2. Substituting T†u, Tu and T∗
u for
Tu in Eq. (40) we obtain the following three 8 × 8matrices which map the Boolean vector β from thenumeric truth table in Fig. 1(d) of the local rule N
onto the Boolean vector β′ of N ′ = Tu(N), whereβk ∈ {−1, 1} and β′
k ∈ {−1, 1}:
B† =
1 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0
0 1 0 0 0 0 0 0
0 0 0 0 0 1 0 0
0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 1
(44)
B =
0 0 0 0 0 0 0 1
0 0 0 0 0 0 1 0
0 0 0 0 0 1 0 0
0 0 0 0 1 0 0 0
0 0 0 1 0 0 0 0
0 0 1 0 0 0 0 0
0 1 0 0 0 0 0 0
1 0 0 0 0 0 0 0
(45)
B∗ =
0 0 0 0 0 0 0 1
0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0
0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0
0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0
1 0 0 0 0 0 0 0
(46)
Substituting these truth table transformation
matrices for B in Eq. (29) with β 110 =
[−1 1 1 1 − 1 1 1 − 1]t for rule 110 , we
obtain the following Boolean vectors β 124 , β 137
and β 193 :
B†β 110 =
1 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0
0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0
0 1 0 0 0 0 0 0
0 0 0 0 0 1 0 0
0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 1
−1
1
1
1
−1
1
1
−1
=
−1
−1
1
1
1
1
1
−1
= β 124 (47)
(−1) • Bβ 110
= (−1) •
0 0 0 0 0 0 0 1
0 0 0 0 0 0 1 0
0 0 0 0 0 1 0 0
0 0 0 0 1 0 0 0
0 0 0 1 0 0 0 0
0 0 1 0 0 0 0 0
0 1 0 0 0 0 0 0
1 0 0 0 0 0 0 0
−1
1
1
1
−1
1
1
−1
=
1
−1
−1
1
−1
−1
−1
1
= β 137 (48)

March 7, 2005 10:10 01176
3724 L. O. Chua et al.
(−1) •B∗β 110
= (−1) •
0 0 0 0 0 0 0 1
0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0
0 1 0 0 0 0 0 0
0 0 0 0 0 0 1 0
0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0
1 0 0 0 0 0 0 0
−1
1
1
1
−1
1
1
−1
=
1
−1
−1
−1
−1
−1
1
1
= β 193 (49)
The factor (−1) in Eqs. (48) and (49) is introducedin order to implement the local complementation in-dicated in Figs. 13–15. In other words, the effect of(−1) in Eqs. (48) and (49) is simply to change thecolor of the vertices of the Boolean cube represented
by Bβ 110 and B∗β 110 .Observe that Eqs. (40) and (41) constitute a
very remarkable transform pair between the (k, l)coefficients of B and the (i, j) coefficients of Tu, andvice versa, because the former involves a nonlinear
operation while the latter involves only a linear op-eration. It is interesting also to note that B†, B, andB∗ in Eqs. (44)–(46) have unit determinants andhence are unimodular matrices. In addition, eachof the 8 × 8 matrices B†, B, and B∗ in Eqs. (44)–(46) commutes with the 8×8 matrix Q in Eq. (32);namely
BQ − QB = 0 (50)
We close this section with the following uniqueresult.
Theorem 4 (Exclusive Global Relationships). The elements T†, T, and
T∗ of the Viererqruppe, V are the only global transformations which pre-
serve the long-term dynamics of all 256 local rules.
Proof. A careful analysis of the preceding analytical
proof shows that the 4 × 4 matrices T†, T, and T∗
defining the Vierergruppe V in Fig. 17(a) are uniquein the sense that they alone can be generalized ton×n matrices for n > 4. Any other transformationof a Boolean cube onto itself, including the 23 ro-
tation transformations to be presented in Sec. 4.1,would lead to a change in sign and/or rearrange-ments of the initial pixel positions. Consequently,long term predictability (t > 1) is impossible. �
Corollary. The local rules listed under each of the
89 subgroups εkm in Tables 2–4 are globally equiv-
alent and hence exhibit identical dynamics for all
times t > 0.
4. Predicting the Predictable
The results from Sec. 3 are global in the sense ofasymptotic time behavior as t → ∞. It proves thateven though there are 256 distinct local rules ina one-dimensional CA, or CNN, there are only 89distinct global dynamic behaviors, a fundamental
result predicted by the identification of 89 global
equivalence classes εκm listed in Tables 2–4. One of
them, class ε231, contains four dynamically equiva-
lent rules {110, 124, 137, 193} capable of univer-sal computation and are therefore unpredictable.The seemingly contradictory nature of the titleof this final section is due to the ambiguity inthe “subject” to be predicted. Here, we are not in-terested in the prediction of long term dynamicbehaviors, which had been proven to be impos-
sible, in general. Rather, the subject we wishto predict in this section is the parameter set{z2, c2, z1, c1, z0, b1, b2, b3} defining the nonlineardifference equations associated with each local rule.In general, an infinitely many distinct, but re-lated, parameter sets can be found to generate thetruth table for each of the 256 local rules. Twosuch sets are given in Tables 4 and 5 in [Chuaet al., 2003]. These two sets of parameters weregenerated by statistical methods, as is the optionof choice when there are infinitely many equallyacceptable parameter sets for each local rule. In

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3725
this section, we will prove that given any set ofparameters
P0(N)∆= {z0
2 , c02, z0
1 , c01, z0
0 , b01, b0
2, b03} , (51)
hence forth called a seed parameter set for local ruleN , which generates the numeric truth table for N[Fig. 1(d)] via Eq. (8), there is a simple and sys-tematic procedure to derive “ρ” additional sets ofparameters, 1 ≤ ρ ≤ 7, which generates the same
local rule N .9 The number ρ depends on the local
equivalence class (to be defined in Sec. 4.2) whereN belongs. For example, we can derive eight ad-ditional parameter sets P1(15), P2(15), . . . , P8(15),
given a parameter seed P0(15) for local rule 15 ,but only one additional parameter set P1(110) from
a parameter seed P0(110) for local rule 110 .The above analytical result is significant for at
least two reasons. First, it represents the only ana-lytical result known so far in the mathematical the-ory of nonlinear dynamics where an explicit ana-
lytical procedure is derived for mapping a nonlineardifferential equation, or a nonlinear difference equa-tion, into a family of up to eight equivalent (topo-logically conjugate) equations. Second, when a pieceof hardware (e.g. a CNN chip) is used to implementa particular local rule in order to enhance the com-putation speed (by at least three orders of magni-tude) [Chua & Roska, 2003], or to be used as a ded-icated component for various practical applications(e.g. video games and other high-tech electronic sys-tems), multiple choices of design parameters can beexploited for optimization with respect to robust-ness and cost.
4.1. The rotation group R
There are 23 distinct ways to rotate the Booleancube in Fig. 1(e) about some axis eaxis by θ◦ so thatthe rotated cube coincides with the original cube,except for the color of their vertices. Each such ro-tation is depicted in Table 15 where the rotationaxis is identified by a red bold arrow and labeledaccordingly. The degrees of rotation θ is also givennext to a black circular arc in a clockwise sense. One
can verify by inspection that each rotated cubein Table 15 will indeed coincide with the unro-tated cube. Each rotation operation in Table 15can be defined mathematically as a transformationof the u = (ui−1, ui, ui+1) axes onto the rotatedu′ = (u′
i−1, u′i, u′
i+1) axes via a 3 × 3 matrix:
u′i−1
u′i
u′i+1
︸ ︷︷ ︸
u′
=
Tk
ui−1
ui
ui+1
︸ ︷︷ ︸
u
(52)
where k = 1, 2, . . . , 23. The transformation matrixTk is given for each rotation operation S[ek, θ] inTable 15, where ek denotes the rotation axis, andwhere x, y, z codes for ui−1, ui and ui+1, respec-tively, and where the bar “−” on top denotes the
complement direction, e.g. x∆= −x.
To visualize the analytical property of a rota-tion transformation on the difference equation, it isconvenient to recast Eq. (8) into the following innerproduct form:
ut+1i = sgn
{
z2 + c2
∣∣∣
(z1 + c1
∣∣(z0
+ 〈b, u〉)∣∣)∣∣∣
}
(53)
where
b∆= [b1 b2 b3]
t (54)
Observe that the rotation operation Tk affects onlythe inner-product (dot product) term because
〈b, u′〉 = 〈b, Tku〉 = 〈Ttkb, u〉
∆= 〈b′, u〉 (55)
where
b′ ∆= [b′1 b′2 b′3]
t = Ttkb (56)
The reciprocal relationship between Tku and Ttkb
revealed by Eq. (55) is important enough toreiterate it as a theorem, in spite of the trivialmathematics.
Theorem 5. If we fix the five parameters {z2, c2, z1, c1, z0} specifying a local rule N , then
the transformed local rule N ′ = Tk(N) can be found by either transforming u via Tk, or
transforming b via Ttk. The transformed axes u′ is obtained by rotating u by θ◦k about an
axis ek in a clockwise direction. The transformed vector b′ is obtained by rotating b by θ◦kabout ek in a counterclockwise direction.
9This procedure is applicable to all rules, except the four degenerate rules 0 , 105 , 150 and 255 .

March 7, 2005 10:10 01176
3726 L. O. Chua et al.
Table 15. There are 23 distinct ways of rotating a Boolean cube by θ◦ degrees through some axis suchthat the rotated cube is indistinguishable (except for the color of the vertices) from the original cube. Theserotations are defined by a 3×3 matrix Tk, k = 1, 2, . . . , 23. All rotation axes are shown by bold red arrowsand labeled accordingly, including the rotation angle θ. All rotations are chosen, without loss of generality,in a clockwise direction.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3727
Table 15. (Continued )

March 7, 2005 10:10 01176
3728 L. O. Chua et al.
Table 15. (Continued )

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3729
Table 15. (Continued )

March 7, 2005 10:10 01176
3730 L. O. Chua et al.
For future reference, the vectors u′ = Tku andb′ = Tt
kb are given in Table 16 for all 24 rota-tion matrices T0, T1, T2 · · ·T23, including the iden-
tity matrix T0. Together they form a 24-elementnon-Abelian group R, whose mulitiplication tableis given in Table 17. Note that the rotation groupR includes 13 subgroups.
The first three subgroups are shaded in or-ange10; they correspond to the only other four-element abstract group, namely, the Abelian groupC4. It is a cyclic group isomorphic to the four rootsof 1, namely, {1, i, −1, −i}, under multiplication.The first subgroup generates the three rotation ma-trices T1 to T3, the second subgroup generates thethree rotation matrices T4 to T6, and the thirdsubgroup generates the three rotation matrices T7
to T9.The next six subgroup (shaded pink) are two-
element abstract groups; they correspond to theonly two-element abstract group C2, which is bothAbelian and cyclic. The six order-two subgroupsgenerate the six rotation matrices T10 to T15.
The last four subgroups (shaded yellow) arethree-element groups; they correspond to the onlythree-element abstract group; namely, C3. It is anAbelian group where each nonidentity element isthe inverse of the other. These four order-three sub-groups generate the eight remaining rotation matri-ces T16 to T23.
4.2. Local equivalence classes
Although each of the 23 rotation matrices Tk listedin Table 17 maps a Boolean cube onto itself, the ro-tated cube will be different in general from the unro-tated cube because the color (red or blue) may notmatch at corresponding vertices. However, a carefulanalysis shows that there are 30 distinct groups (inthe sense of subsets, and not group theory) amongthe 256 Boolean cubes where the cubes belongingto each subset have matched color vertices after ro-tating each cube by an appropriate Tk. These 30groups of Boolean cubes are displayed in Table 18and identified by a suggestive symbol Sn
m, where thesubscript “m” denotes the number of red vertices ofall Boolean cubes belonging to map Sn
m. Just likea left-handed glove is different from a right-handed
glove (each fits only one hand), not all Booleancubes with the same number “m” of red verticescan be rotated to match each other. Each subset of“m ” red vertices which do match would constitutetherefore a separate group. The superscript “n” ofSn
m denotes therefore the subgroup number, hence-forth called the chiral number, a generalization ofthe terminology from chemistry which was intro-duced for similar purposes in classifying molecules.
The Boolean cubes associated with each of the30 groups Sn
m whose rotated version have the same(matched) red vertices are exhibited in Table 18.They are arranged in two columns in a laterallysymmetric manner so that two rules located at twolaterally symmetric positions would have cubes withcomplementary vertex colors, and hence their localrule numbers would add up to zero. This impliesthat the superscript “n” for Sn
m at correspondingleft–right columns must be identical, and that theirsubscripts must add up to 8 since there are a totalof eight red vertices.
It follows from the definition of the complexity
index11 in Eq. (9) that all local rules belonging tothe same group Sn
m must have the same index κ.This useful information is therefore written beloweach group label Sn
m.The first Boolean cube (with the smallest lo-
cal rule number) belonging to each group Snm is
highlighted along with its associated b parame-ters (b1, b2, b3) printed on the left of the cube andused as a “seed” to generate the other membersof the group via appropriate rotation transforma-tions, each identified by [ek, θ]. The rotation matrixTk used to generate each member of the group istranslated directly into the corresponding parame-ter vector b′ = [b′1 b′2 b′3]
t on the right of eachrotated cube (identified by its rule number in red).
For cross referencing purposes, Table 18 isrepackaged in Table 19 where each Boolean cubeis replaced by a corresponding eight-bit Booleanstring for rule N = (β7 β6 β5 β4 β3 β2 β1 β0). A suc-cinct summary showing only the local rules belong-ing to each group Sn
m is given in Table 20.Given a local rule number N , we will often need
to know which group Snm it belongs to. Table 21 con-
tains this information. In addition, the complexity
10The identity element T0 in each subgroup in Table 17 is not listed.11It follows also from Eq. (9) that the complexity index of each local rule (for a one-dimensional cellular automata with nearestneighbors) is equal to the number of elementary nonlinear functions of one variable (in this case, they are the sign functionsgn(•) and the absolute-value function | • |) needed to represent N . Hence, κ = 1, 2 or 3, depending on whether Eq. (9) has 0,1 or 2 absolute-value functions.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3731
Table 16. Each rotation matrix Tk maps the coordinates u = (ui−1, ui, ui+1) in Fig. 1(e) into new coordinatesu′ = (u′
i−1, u′i, u′
i+1). Such a transformation u′ = Tku of u is equivalent to applying the transformation
T′k
∆= T
tk on the parameter vector b
∆= (b1, b2, b3) to obtain b
′ = T′kb. The transformed coordinates u
′ andthe equivalent transformed parameter vector b
′ are listed for all Tk, k = 1, 2, . . . , 23.

March
7,2005
10:1001176
Table 17. Multiplication table for the rotation group R. There are three four-element cyclic subgroups (orange), six two-element cyclic subgroups (pink),and four three-element cyclic subgroups (yellow).
3732

March
7,2005
10:1001176
Table 18. Partitioning of the 256 local rules into 30 local equivalence classes. Each equivalent class is identified uniquely by the symbol Snm where the
subscript “m” denotes the number of red vertices of the Boolean cube belonging to this class. The superscript “n” is an identification number, calledthe chiral number, used to distinguish different local equivalence classes all having the same number of red vertices. The 30 local equivalence classesare arranged in two columns such that the vertices of each pair of Boolean cubes located in laterally symmetric positions have complementary colors,and hence their rule numbers must add up to 255. The “seed” used to generate Sn
m is highlighted.
3733

March 7, 2005 10:10 01176
Table
18.
(Continued
)
3734

March 7, 2005 10:10 01176
Table
18.
(Continued
)
3735

March 7, 2005 10:10 01176
Table
18.
(Continued
)
3736

March 7, 2005 10:10 01176
Table
18.
(Continued
)
3737

March 7, 2005 10:10 01176
Table
18.
(Continued
)
3738

March
7,2005
10:1001176
Table 19. The same information as Table 18 but with the Boolean cube replaced by its eight-bit Boolean string (β7 β6 β5 β4 β3 β2 β1 β0). Therotation matrix Tk used to generate the new Boolean string (β′
7 β′6 β′
5 β′4 β′
3 β′2 β′
1 β′0) is shown on the left (resp., right) of each eight-bit Boolean
string.
3739

March 7, 2005 10:10 01176
Table
19.
(Continued
)
3740

March 7, 2005 10:10 01176
Table
19.
(Continued
)
3741

March 7, 2005 10:10 01176
Table
19.
(Continued
)
3742

March 7, 2005 10:10 01176
Table
19.
(Continued
)
3743

March 7, 2005 10:10 01176
3744 L. O. Chua et al.
Table 20. Local equivalence classes of local rules. The subscript m denotes the number of red vertices of theBoolean cubes belonging to the local equivalence class Sn
m, whereas the superscript “n” denotes the chiral numberto distinguish multiple nonequivalent subgroups having the same number of red vertices. The symbol S printedbelow each local equivalence class Sn
m denotes the number of local rules belong to Snm.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3745
Table 20. (Continued )

March 7, 2005 10:10 01176
3746 L. O. Chua et al.
Table 21. Catalog of local equivalence class membership. For each local rule N listed consecutively on the left, itsassociated local equivalence class Sn
m(N) is listed on the right. The local rule number N on the left column is printedin red, blue or green if its complexity index κ = 1, 2 or 3, respectively.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3747
Table 21. (Continued )

March 7, 2005 10:10 01176
3748 L. O. Chua et al.
Table 22. Six distinct rotations {T2, T4, T9, T14, T20, T23} for transforming rule 24 to rule 129 .

March
7,2005
10:1001176
Table 23. List of q∆= 24/S rotation matrices which transform the highlighted local rule N (called the seed) of each local equivalence class Sn
m into the same
local rule N ′ ∈ Snm, where “S” denotes the number indicated in Table 20 below each equivalence class Sn
m.
3749

March 7, 2005 10:10 01176
Table
23.
(Continued
)
3750

March 7, 2005 10:10 01176
Table
23.
(Continued
)
3751

March 7, 2005 10:10 01176
Table
23.
(Continued
)
3752

March 7, 2005 10:10 01176
Table
23.
(Continued
)
3753

March 7, 2005 10:10 01176
Table
23.
(Continued
)
3754

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3755
Table 24. Table of rotation matrices Tj and their inverse T−1j , j = 0, 1, 2, . . . , 23.
index κ of each local rule is colored in red for κ = 1,blue for κ = 2, and green for κ = 3.
Finally, since each local rule N belonging toa set Sn
m is generated by applying a rotationtransformation Tk on the “seed” Boolean cube, it
follows that each member is locally equivalent (inthe sense articulated in Sec. 2) to this germinatingcube. Moreover, since all rotations listed in Table 15form a group, every member of Sn
m is locally equiv-alent to every other member belonging to the sameset Sn
m. We summarize this result as follow.
Theorem 6. All local rules belonging to Snm are locally equivalent to each other, thereby
forming a local equivalence class.
4.3. Finding all rotations which
map any N ∈ Sn
mto any
N ′ ∈ Sn
m
It follows from Theorem 6 that if N ∈ Snm and
N ′ ∈ Snm are any two members of a local equivalence
class Snm, then there must exist at least one rotation
matrix Tj which maps N to N ′. In general, theremay exist several rotation matrices which wouldqualify. For example, Table 22 shows six different ro-tation matrices {T2, T4, T9, T14, T20, T23} that
transform the Boolean cube 24 to the Boolean
cube 129 , both belonging to S32 (see Table 21).
Using Tables 15–17, we can find all rotation
matrices which map the highlighted “seed” Boolean
cube in Table 18 into each member belonging to thesame class. The results are presented in Table 23.
To simplify the derivation of this table, it is useful
to use Table 24 which gives the inverse of every ro-
tation matrix Tj, j = 0, 1, 2, . . . , 23. Observe thatsince each rotation matrix Tj is a unitary matrix,
we have T−1j = Tt
j
∆= T′
j.
Table 23 gives only partial results since only 30
seed Boolean cubes are used. A much more usefultable would be a “reversible” catalog which provides
explicitly all rotation matrices which map any local

March 7, 2005 10:10 01176
3756 L. O. Chua et al.
rule N ∈ Snm to any other local rule in N ′. This
lengthy catalog is presented in Table 25. To avoid
confusion, all rotations Tj associated with a local
rule N in the left column (in pink) is indicated in
pink. Conversely, one can choose any N ∈ Snm from
the top row (in green) and identify the associatedrotation matrices Tj in green. The 30 local equiva-
lence classes in Table 25 are located as follow:
Equivalence ClassSn
mTable No.
S11 25(a)
S12 25(c)
S22 25(e)
S32 25(g)
S13 25(i)
S23 25(k)
S33 25(m)
S14 25(o)
S24 25(p)
S34 25(q)
S44 25(s)
S54 25(t)
S64 25(v)
S74 25(x)
Table No.Equivalence Class
Snm
25(b) S17
25(d) S16
25(f) S26
25(h) S36
25(j) S15
25(l) S25
25(n) S35
25(o) S14
25(p) S24
25(r) S34
25(s) S44
25(u) S54
25(w) S64
25(x) S74
For example, to find all rotation matrices whichmap the local rule 24 to rule 129 , both belong-ing to S3
2 , we first identify the relevant location inTable 25(g) from the preceding index, and then goto Table 25 to extract the six pink colored matrices{T2, T6, T7, T14, T21, T22} at location 25(g).
A careful analysis of Table 25 shows that thenumber of rotation matrices for mapping two localrules in any equivalence class Sn
m can be determinedby dividing the number 24 by the number of rulesS belonging to Sn
m (see Table 20). For the above ex-ample, S3
2 has four local rules {24, 36, 66, 129}, andhence we expect to have q = 24/4 = 6 rotation ma-trices. Similarly, we note from Table 20 that sinceS1
4 and S35 have three and twenty-four local rules
respectively, we can expect to find eight and one
rotation matrices, respectively. Hence, in general,the number of rotation matrices mapping N to N ′
can range from 1 to 8.Finally, observe from Table 25 that in order to
map any local rule N ∈ Snm to any other local rule
N ′ ∈ Snm, it is necessary to involve all 23 rotation
matrices.
4.4. Truth-table mapping matrices
for the rotation group R
Just as in Eq. (29) where each 3× 3 transformationmatrix T†, T and T∗ induces a unique 8 × 8 truth-
table mapping matrix B†, B and B∗, each 3 × 3rotation matrix Tk also induces a unique 8 × 8

March
7,2005
10:1001176
Table 25. Reversible catalog of all rotation matrices mapping any local rule N ∈ Snm to any other local rule N ′ ∈ Sn
m. Pink rotation matrices are associatedwith pink local rules displayed in the left column. Green rotation matrices are associated with green local rules displayed in the top row. For example, local rule2 ∈ S1
1 can be transformed into local rule 16 by applying any one of three pink rotation matrices T5, T16 and T20, located at the intersection of row 2 andcolumn 16. Conversely, the same result can be obtained by applying any one of the three green rotation matrices T5, T16 and T20 located at the intersectionbetween column 2 and row 16. All tables are arranged in alphabetical order. The local equivalence classes Sn
m from Table 20 are ordered from left to right, andfrom top to bottom.
(a)
3757

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(b)
3758

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3759
Table 25. (Continued )
(c)-1

March 7, 2005 10:10 01176
3760 L. O. Chua et al.
Table 25. (Continued )
(c)-2

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3761
Table 25. (Continued )
(d)-1

March 7, 2005 10:10 01176
3762 L. O. Chua et al.
Table 25. (Continued )
(d)-2

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3763
Table 25. (Continued )
(e)-1

March 7, 2005 10:10 01176
3764 L. O. Chua et al.
Table 25. (Continued )
(e)-2

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3765
Table 25. (Continued )
(f)-1

March 7, 2005 10:10 01176
3766 L. O. Chua et al.
Table 25. (Continued )
(f)-2

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(g)
(h)
3767

March 7, 2005 10:10 01176
3768 L. O. Chua et al.
Table 25. (Continued )
(i)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3769
Table 25. (Continued )
(i)-2

March 7, 2005 10:10 01176
3770 L. O. Chua et al.
Table 25. (Continued )
(i)-3

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3771
Table 25. (Continued )
(i)-4

March 7, 2005 10:10 01176
3772 L. O. Chua et al.
Table 25. (Continued )
(j)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3773
Table 25. (Continued )
(j)-2

March 7, 2005 10:10 01176
3774 L. O. Chua et al.
Table 25. (Continued )
(j)-3

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3775
Table 25. (Continued )
(j)-4

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(k)
3776

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(l)
3777

March 7, 2005 10:10 01176
3778 L. O. Chua et al.
Table 25. (Continued )
(m)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3779
Table 25. (Continued )
(m)-2

March 7, 2005 10:10 01176
3780 L. O. Chua et al.
Table 25. (Continued )
(m)-3

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3781
Table 25. (Continued )
(m)-4

March 7, 2005 10:10 01176
3782 L. O. Chua et al.
Table 25. (Continued )
(n)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3783
Table 25. (Continued )
(n)-2

March 7, 2005 10:10 01176
3784 L. O. Chua et al.
Table 25. (Continued )
(n)-3

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3785
Table 25. (Continued )
(n)-4

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(o)
3786

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(p)
3787

March 7, 2005 10:10 01176
3788 L. O. Chua et al.
Table 25. (Continued )
(q)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3789
Table 25. (Continued )
(q)-2

March 7, 2005 10:10 01176
3790 L. O. Chua et al.
Table 25. (Continued )
(r)-1

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3791
Table 25. (Continued )
(r)-2

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(s)
3792

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3793
Table 25. (Continued )
(t)

March 7, 2005 10:10 01176
3794 L. O. Chua et al.
Table 25. (Continued )
(u)

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3795
Table 25. (Continued )
(v)

March 7, 2005 10:10 01176
3796 L. O. Chua et al.
Table 25. (Continued )
(w)

March 7, 2005 10:10 01176
Table
25.
(Continued
)
(x)
3797

March 7, 2005 10:10 01176
3798 L. O. Chua et al.
matrix Bk which maps the numeric Boolean vec-tor β into the numeric Boolean vector β′ = Bkβ,k = 1, 2, 3, . . . , 23. These matrices can be gener-ated from the same formula given in Eq. (40) andare displayed in Table 26.
As an example, to find Boolean vector β′ re-sulting from applying the 3 × 3 rotation matrix
T18 =
0 −1 0
0 0 1
−1 0 0
from Table 15 to rule 110 , we simply multiply the
matrix B18 with β 110 as follows:
B18β 110 =
0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1
0 1 0 0 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
1 0 0 0 0 0 1 0
0 0 1 0 0 0 0 0
−1
1
1
1
−1
1
1
−1
=
1
−1
1
1
−1
1
−1
1
= β 173
The resulting Boolean vector corresponds to the lo-cal rule number
N = 1 • 20 + 0 • 21 + 1 • 22 + 1 • 23 + 0 • 24
+ 1 • 25 + 0 • 26 + 1 • 27
= 173 ,
where the corresponding symbolic code βk ∈ {0, 1}is used for the βk defined in Eq. (2).
4.5. Combining transformations
from the Vierergruppe V and
the rotaion group R
By combining transformations from the Vier-ergruppe V from Sec. 3.2 and the rotation groupR from Sec. 4.1, it is possible to map two local
equivalence classes with different chiral numbers toeach other. For example, Table 27(a) shows thetwo local equivalence classes S5
4 and S64 on the left
(resp. right) column of Table 18 maps to each othervia the left–right transformation T†. Similarly,Table 27(b) shows the local equivalence classes S5
4
on the left column of Table 18 maps to a subsetof S6
4 on Table 18 via the global complementationT. Similarly, the local equivalence class S5
4 on theright column of Table 18 maps to a subset of S6
4 onTable 18 via the global complementation T.
4.6. Laterally symmetric
interaction group for local
equivalence classes
It is possible to depict the relationship between lo-cal rules belonging to each local equivalence classSn
m represented in a laterally symmetric graph us-ing only one or two rotations matrices, as displayedin Table 28. The rotation matrix Tj in blue per-tains to mappings between the b-parameter vectors,whereas the rotation matrix Tj in red pertains tomappings between the u vectors. Note that not allrotation matrices are needed here because any pairsof local rules can be mapped via a composition ofseveral rotation transformations. In fact, Table 29shows that all 24 members of the rotation groupcan be generated by repeated compositions involv-ing only T1 and T4.
4.7. Mapping parameter vectors
between rule 110 and its
locally-equivalent rules
To illustrate the immense value and significanceof Table 25, let us first use it to construct the“star transition graph” shown in Fig. 16(a), andits “inverse transition graph” in Fig. 16(b). Thestar transition graph gives the rotation matrix Tj
which maps the local rule 110 into one of the23 local rules belonging to the local equivalenceclass S3
5 where 110 is a member. The inverse star
transition graph gives the rotation matrix T−1k
∆=
T′k (Table 24) which maps each local rule N from
Fig. 16(a) into the local rule 110 .To construct the star transition graph, we first
identify the relevant Tables 25(n)-2 and 25(n)-4,
which contain the local rule 110 . We then be-gin from the top of column 7 (corresponding to
110 ) of Table 25(n)-2 and go down vertically in the

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3799
Table 26. Table of all 23 truth table transformation matrices Bk which maps any Boolean vector βN into
βN
′
where N ′ = Tk(N), k = 0, 1, 2, . . . , 23.

March 7, 2005 10:10 01176
3800 L. O. Chua et al.
Table 26. (Continued )

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3801
Table 26. (Continued )

March 7, 2005 10:10 01176
3802 L. O. Chua et al.
Table 27. Four subsets of local equivalence classes which are related via global transformations T† and T.
(a)
(b)

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3803
Table 28. Laterally symmetric groupings of local rules belonging to the same local equivalence class Snm, m = 0, 1, 2, 3, 4
on the left, and m = 8, 7, 6, 5, 4 on the right. All local rules belonging to each local equivalence class Snm are generated by
one or two rotation matrices. The coordinates u′ = Tku between any pair of adjacent rules is generated by matrix Tk (in
red). The parameter vector b′ = T
′kb is generated by matrix T
′k (in blue).
Table (28)-1
S10
0 0 TjTj-1
S18
255255Tj Tj-1
%S1
1
1
2
4
8
16
32
64
128
4
1
2
8
TT
TT
11
11
TT
TT
33
33
32
128
64
16
TT
TT
11
11
TT
TT
33
33T4
T 6
S17
127
191
223
239
247
251
253
254
223
127
191
239
TT
TT
11
11
TT
TT
33
33
251
254
253
247
TT
TT
11
11
TT
TT
33
33T4
T 6
S12
3
5
10
12
17
34
68
136
192
160
80
48
T1T3
T 1T 3T1
T3
T1
T3
T 1
T 3
T1
T3
T1
T3T1
T3
T1
T3
T 1T3
T1T3
T1 T3
3
10
12
5
17
34136
68
160
192
80
48
T4T4
T4
T6T6
T6
S16
252
250
245
243
238
221
187
119
63
95
175
207
T1T3
T 1T 3T1
T3
T1
T3
T 1
T 3
T1
T3
T1
T3
T1
T3
T1
T3
T 1T3
T1T3
T1 T3
252
245
243
250
238
221119
187
95
63
175
207
T4T4
T4
T6T6
T6
S22
6
18
20
9
33
65
130
132
144
40
72
96
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T17
T16T17
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T17
T16T17
20
6
18
33
9
65
132
144
130
40
96
72
T1
T1
T1T1
T3
T3
T3T3
S26
249
237
235
246
222
190
125
123
111
215
183
159
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T17
T16T17
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T17
T16T17
235
249
237
222
246
190
123
111
125
215
159
183
T1
T1
T1T1
T3
T3
T3T3
S32
24
36
66
129 24
36
66
129
TT
TT
44
44
TT
TT
66
66
S36
231
219
189
126231
219
189
126
TT
TT
44
44
TT
TT
66
66

March 7, 2005 10:10 01176
3804 L. O. Chua et al.
Table 28. (Continued )
S13
7
11
13
14
19
42
69
140
21
35
76
138
49
162
84
200
81
50
196
168
112
176
224
208
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T37 11
13 14
19 42
69 140
21 35
76 138
84 200
49 162
196 168
81 50
112 176
208 224
T4 T4
T4T4
T4T4
T6 T6
T6 T6
T6 T6
S15
248
244
242
241
236
213
186
115
234
220
179
117
206
93
171
55
174
205
59
87
143
79
31
47
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3248 244
242 241
236 213
186 115
234 220
179 117
171 55
206 93
59 87
174 205
143 79
47 31
T4 T4
T4T4
T4T4
T6 T6
T6 T6
T6 T6
S23
22
41
73
134
97
146
148
104
73
22
41
134
TT
TT
11
11
TT
TT
33
33
146
104
148
97
TT
TT
11
11
TT
TT
33
33T4
T6
S25
233
214
182
121
158
109
107
151
182
233
214
121
TT
TT
11
11
TT
TT
33
33
109
151
107
158
TT
TT
11
11
TT
TT
33
33T4
T6
S33
25
38
70
137
28
37
74
131
26
44
67
133
56
164
82
193
88
52
194
161
152
100
98
145
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T325 38
70 137
37 131
28 74
67 26
133 44
193 164
82 56
88 194
52 161
145 98
100 152
T4 T4
T4T4
T4T4
T6 T6
T6 T6
T6 T6
S35
230
217
185
118
227
218
181
124
229
211
188
122
199
91
173
62
167
203
61
94
103
155
157
110
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3230 217
185 118
218 124
227 181
188 229
122 211
62 91
173 199
167 61
203 94
110 157
155 103
T4 T4
T4T4
T4T4
T6 T6
T6 T6
T6 T6

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3805
Table 28. (Continued )
S14
15
51
85
170
204
240
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T 17
T16T17
15
51
85
240
170
204
T1
T3
S24
23
43
77
142
113
178
212
232
23
43
77
142
TT
TT
11
11
TT
TT
33
33
178
232
212
113
TT
TT
11
11
TT
TT
33
33T4
T6
S44
60
90
102
153
165
195
T 16T 17
T16
T17
T16
T17
T16
T17
T16
T 17
T16T17
90
60
102
195
165
153
T1
T3
S34
30
45
75
135
57
86
166
201
101
147
156
106
54
89
169
198
99
108
149
154
120
180
210
225
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T3
T1T3
T 1T 3
T1T3
T1
T375 30
135 45
57 166
86 201
101 147
156 106
89 198
54 169
108 154
149 99
210 120
225 180
T4 T4
T4T4
T4T4
T6 T6
T6 T6
T6 T6
S54
27
46
141
71
53
163
202
92
184
228
209
114
T1T3
T 1T 3T1
T3
T1
T3
T 1
T 3
T1
T3
T1
T3
T1
T3
T1
T3
T 1T3
T1T3
T1 T3
27
46
141
71
53
163202
92
184
228
209
114
T4T4
T4
T6T6
T6
S64
216
116
177
226
172
197
83
58
29
39
139
78
T1T3
T 1T 3T1
T3
T1
T3
T 1
T 3
T1
T3
T1
T3
T1
T3
T1
T3
T 1T3
T1T3
T1 T3
216
116
177
226
172
19783
58
29
39
139
78
T4T4
T4
T6T6
T6
S74
105
150105 150
T
T
1
1
T
T
3
3
order 230 , 229 , 227 , 218 , 217 , 211 , 203 ,
199 , 188 , 185 , 181 , 173 , and continuing
(using Table 25(n)-4) to 167 , 157 , 155 , 124 ,
122 , 118 , 110 , 103 , 94 , 91 , 62 , and 61 .We then extract the matrix Tj inside the green
downward-pointing triangle corresponding to eachlocal rule N and display it next to the red ray
in Fig. 16(a) emanating from 110 to N as indi-
cated by the outgoing arrow head.
To construct the inverse star transition graph,
we repeat the above process but this time we ex-
tract instead the rotation matrix Tk inside the pink
upward-pointing triangle corresponding to each lo-
cal rule N in Tables 25(n)-2 and 25(n)-4 and

March 7, 2005 10:10 01176
3806 L. O. Chua et al.
Table 29. Every rotation matrix Tk, k = 0, 1, 2, . . . , 23, can be generated by repeated compositions of only T1
and T4.
display it next to the blue ray in Fig. 16(b) converg-
ing from N to 110 , as indicated by the incomingarrow head. As a check, one can verify that Tk inFig. 16(b) is equal to the inverse, or the transpose,of the corresponding rotation matrix in Fig. 16(a),as specified in Table 24.
Let us now illustrate how to predict the vector
b N of each local rule N ∈ S35 once we are given
a parameter vector (out of infinitely many equally
valid parameter values) b 110 which specifies the lo-cal rule 110 via its nonlinear difference equation.12
For the following illustration, let us reproduce belowthe difference equation given in Table 5 (p. 2417)from [Chua et al., 2003] for the local rule 110
ut+1i = sgn[−2 + |ut
i−1 + 2uti − 3ut
i+1 − 1|] (57)
12Two such parameter vectors were given in [Chua et al., 2003] for each of the 256 local rules. One set of the parametersis given in Table 4 (pp. 2386–2389) for the general case involving eight parameters. Another set is given implicitly via thedifference equation for each local rule listed in Table 5 (pp. 2390–2453), where only six parameters [see Eq. (11)] were neededfor all local rules with the complexity index κ = 2, and only four parameters [see Eq. (10)] are needed for all local rules withthe complexity index κ = 1.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3807
(a)
(b)
Fig. 16. (a) A star transition graph mapping the local rule 110 into 23 local rules N belonging to the local equivalence
class S35 via the indicated rotation matrix Tj . (b) An inverse star transition graph mapping each of the 23 local rules N
belonging to S35 into the same local rule 110 via the indicated rotation matrix Tk.

March 7, 2005 10:10 01176
3808 L. O. Chua et al.
Note that Eq. (57) has only one absolute value
function since the complexity index for rule 110is equal to 2. Hence it suffices for us to examineEq. (11) involving only the following six parame-
ters for specifying the truth table of rule 110 :
z1 = −2 , c1 = 1 , z0 = −1 ,
b1 = 1 , b2 = 2 , b3 = −3(58)
Without loss of generality we can fix the valuesof z1, c1 and z0 and then derive the values of(b1, b2, b3) for generating the truth table of eachlocal rule N ∈ S3
5 . Let us introduce the notation
b 110 =
b110
1
b110
2
b110
3
=
1
2
−3
, b N =
bN
1
bN
2
bN
3
(59)
Using the rotation matrix Tj corresponding to eachlocal rule N ∈ S3
5 from the star transition graphin Fig. 16(a), and with the help of Table 16, we
can derive the corresponding parameter vector b N
by simply permuting the elements b110
1 , b110
2 and
b110
3 , and multiplying each parameter element by+1 or −1. The resulting vector is then used to con-struct the nonlinear difference equation which willcorrectly generate the truth table for each local ruleN ∈ S3
5 .For example, let us derive the parameter vector
b 229 from
b 110 =
1
2
−3
(60)
given in Eq. (59). To find the appropriate rotation
matrix Tk required to transform b 110 into b 229 ,we use the star transition graph in Fig. 16(a) and
found 110 maps into 229 via the rotation matrix
T21 , i.e. u 229 = T21u110 . But our goal here is
to find the parameter vector b 229 , hence the ma-
trix we need to multiply with b 110 is T′21, which
is equal to T20 in view of Table 24, since all rota-tion matrices in Table 15 are unitary matrices, andhence T′
k = T−1k .
Finally, to find the parameter vector b 229 wesimply look up Table 16 and find the item
T ′21
b1
b2
b3
=
b3
−b1
−b2
=
−3
−1
−2
(61)
In other words, we have successfully derived N ∈S3
5 . These nontrivial results could only be obtainedvia the one-dimensional cellular automata devel-oped in Part I [Chua et al., 2002]. They are sum-marized in Tables 30(a)-1 and 30(a)-3.
Conversely, given the parameter vector b N forany local rule N ∈ S3
5 , we can derive the cor-
responding parameter vector b 110 = T′kb
N byidentifying the appropriate rotation matrix Tk fromthe inverse star transition graph in Fig. 16(b) anduse Table 16 to identify the transformed vector
b 110 corresponding to T′k.
To illustrate the above procedure, we repro-duce the nonlinear difference equation of the 23 lo-cal rules belonging to S3
5 from Table 5 (pp. 2390–2453) of [Chua et al., 2003] and display them inTables 30(b)-1 to 30(b)-3. From these differential
equations, we extracted the parameter vector b N
for each local rule N . We then use the inversestar transition graph in Fig. 16(b) and Table 16 to
derive b 110 , and its corresponding difference equa-tion. Observe that there are 23 distinct vectors, and23 corresponding nonlinear difference equations, allof them will generate the same truth table for N =
110 . Observe that except for b 110 = [1 2 3]t,which was not extracted from Table 5 of [Chuaet al., 2003] to avoid redundancy with Table 30(a),all other rules extracted from Table 5 map to
only two distinct b 110 . This highly unlikelyevent was due to the fact that Table 5 from[Chua et al., 2003] was in fact constructed byvarious rotation transformations of the Booleancube before we have formally identified the ro-tation group R in Sec. 4.1. The above observa-tion is therefore an artifact of the algorithm we
used to generate Table 5. If the vector b N inTable 30(b) are chosen to be another indepen-
dent set, then the transformed vector b 110 woulddiffer from each other as well. To illustrate thisgeneric property, we have constructed a randomly-generated set of difference equations for the 24members of the local equivalence class S3
5 , and have

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3809
Table 30. (a) An example illustrating the systematic derivation of 23 new nonlinear difference equations
representing 23 local rules belonging to S35 from a single given difference equation representing the local rule
110 via its parameter vector b110 = [1 2 −3]t. (b) An example illustrating the mapping of the parameter
vector bN of two sets of 23 nonlinear difference equations representing 23 local rules belonging to S3
5 into two
corresponding sets of 23 new nonlinear difference equations all of which represent the single local rule 110 .
Mapping b 110 to b N Difference Equation Rule No.
b 110 =
1
2
−3
T′
14−→ b 230 =
−1
−3
2
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−ut
i−1−3u t
i+2u t
i+1−1
∣
∣
∣
∣
]
230
b 110 =
1
2
−3
T′
21−→ b 229 =
−3
−1
−2
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−3u t
i−1−ut
i−2u t
i+1−1
∣
∣
∣
∣
]
229
b 110 =
1
2
−3
T′
22−→ b 227 =
2
3
−1
=⇒ u
t+1
i= sgn
[
−2 +
∣
∣
∣
∣
2u t
i−1 + 3u t
i− u
t
i+1 − 1
∣
∣
∣
∣
]
227
b 110 =
1
2
−3
T′
9−→ b 218 =
2
−1
−3
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
2u t
i−1 − ut
i− 3u t
i+1 − 1
∣
∣
∣
∣
]
218
b 110 =
1
2
−3
T′
5−→ b 217 =
−1
2
3
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−ut
i−1 +2u t
i+3u t
i+1−1
∣
∣
∣
∣
]
217
b 110 =
1
2
−3
T′
12−→ b 211 =
−3
−2
1
=⇒ u
t+1
i= sgn
[
−2+
∣
∣
∣
∣
−3u t
i−1−2u t
i+u
t
i+1−1
∣
∣
∣
∣
]
211
b 110 =
1
2
−3
T′
18−→ b 203 =
−2
−3
−1
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−2u t
i−1−3u t
i−u
t
i+1−1
∣
∣
∣
∣
]
203
b 110 =
1
2
−3
T′
6−→ b 199 =
3
2
1
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
3u t
i−1 + 2u t
i+ u
t
i+1 − 1
∣
∣
∣
∣
]
199
(a)-1

March 7, 2005 10:10 01176
3810 L. O. Chua et al.
Table 30. (Continued )
(a)-2

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3811
Table 30. (Continued )
Mapping b 110 to b N Difference Equation Rule No.
b 110 =
1
2
−3
T′
16−→ b 122 =
−3
1
2
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−3u t
i−1 +ut
i+2u t
i+1−1
∣
∣
∣
∣
]
122
b 110 =
1
2
−3
T′
15−→ b 118 =
−1
3
−2
=⇒ ut+1
i= sgn
[
−2+
∣
∣
∣
∣
−ut
i−1 +3u t
i−2u t
i+1−1
∣
∣
∣
∣
]
118
b 110 =
1
2
−3
T′
0−→ b 110 =
1
2
−3
=⇒ u
t+1
i= sgn
[
−2 +
∣
∣
∣
∣
ut
i−1 + 2u t
i− 3u t
i+1 − 1
∣
∣
∣
∣
]
110
b 110 =
1
2
−3
T′
2−→ b 103 =
1
−2
3
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
ut
i−1 − 2u t
i+ 3u t
i+1 − 1
∣
∣
∣
∣
]
103
b 110 =
1
2
−3
T′
11−→ b 94 =
−2
−1
3
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
−2u t
i−1 − ut
i+ 3u t
i+1 − 1
∣
∣
∣
∣
]
94
b 110 =
1
2
−3
T′
23−→ b 91 =
3
1
−2
=⇒ u
t+1
i= sgn
[
−2 +
∣
∣
∣
∣
3u t
i−1 + ut
i− 2u t
i+1 − 1
∣
∣
∣
∣
]
91
b 110 =
1
2
−3
T′
13−→ b 62 =
3
−2
−1
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
3u t
i−1 − 2u t
i− u
t
i+1 − 1
∣
∣
∣
∣
]
62
b 110 =
1
2
−3
T′
20−→ b 61 =
−2
3
1
=⇒ ut+1
i= sgn
[
−2 +
∣
∣
∣
∣
−2u t
i−1 + 3u t
i+ u
t
i+1 − 1
∣
∣
∣
∣
]
61
(a)-3

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
230 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b230
=
[
−1
2
2
]
T′
14−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
229 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 + 1ut
i + 2ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b229
=
[
−2
1
2
]
T′
21−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
227 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 − 2ut
i − ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b227
=
[
2
−2
−1
]
T′
22−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
218 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 − ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b218
=
[
2
−1
2
]
T′
9−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1−1|
]
217 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 + 2ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b217
=
[
−1
2
−2
]
T′
5−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
211 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 + 2ut
i − ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b211
=
[
−2
2
−1
]
T′
12−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
203 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 + 2ut
i − 1ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b203
=
[
−2
2
1
]
T′
18−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
199 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 − 2ut
i − ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b199
=
[
2
−2
−1
]
T′
6−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
(b)-1
3812

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
188 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 + 2ut
i − ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b188
=
[
2
2
−1
]
T′
4−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
185 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b185
=
[
−1
−2
2
]
T′
8−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
181 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 + ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b181
=
[
2
1
−2
]
T′
10−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
173 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 − ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b173
=
[
−2
−1
2
]
T′
19−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
167 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 + ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b167
=
[
−2
1
2
]
T′
7−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
157 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b157
=
[
1
2
−2
]
T′
3−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
155 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 + 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b155
=
[
−1
2
−2
]
T′
1−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
124 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
2ut
i−1 + 2ut
i + ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b124
=
[
2
2
1
]
T′
17−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
(b)-2
3813

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
122 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 − ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b122
=
[
−2
−1
−2
]
T′
16−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
118 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b118
=
[
−1
−2
−2
]
T′
15−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
110 ut+1
i= sgn
[
4 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 3ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b110
=
[
1
2
3
]
T′
0−→ b110
=
[
1
2
3
]
⇒ ut+1
i= sgn
[
4 − 1
∣
∣
∣
∣
ut
i−1 + 2ut
i + 3ut
i+1 − 1
∣
∣
∣
∣
]
103 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 + 2ut
i + 2ut
i+1 + 1
∣
∣
∣
∣
]
⇒ b103
=
[
−1
2
2
]
T′
2−→ b110
=
[
−1
−2
−2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−ut
i−1 − 2ut
i − 2ut
i+1 + 1
∣
∣
∣
∣
]
94 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 − ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b94
=
[
−2
−1
−2
]
T′
11−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
91 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 + ut
i − 2ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b91
=
[
−2
1
−2
]
T′
23−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
62 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 − 2ut
i − ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b62
=
[
−2
−2
−1
]
T′
13−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
61 ut+1
i= sgn
[
3 −
∣
∣
∣
∣
−2ut
i−1 − 2ut
i + ut
i+1 − 1
∣
∣
∣
∣
]
⇒ b61
=
[
−2
−2
1
]
T′
20−→ b110
=
[
1
2
2
]
⇒ ut+1
i= sgn
[
3 −
∣
∣
∣
∣
ut
i−1 + 2ut
i + 2ut
i+1 − 1
∣
∣
∣
∣
]
(b)-3
3814

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
230 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 + ut
i−1 − 4ut
i − 6ut
i+1
∣
∣
∣
∣
]
⇒ b230
=
[
1
−4
−6
]
T′
14−→ b110
=
[
−1
−6
−4
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − ut
i−1 − 6ut
i − 4ut
i+1
∣
∣
∣
∣
]
229 ut+1
i= sgn
[
4 −
∣
∣
∣
∣
1 − 3ut
i−1 + 2ut
i + 3ut
i+1
∣
∣
∣
∣
]
⇒ b229
=
[
−3
2
3
]
T′
21−→ b110
=
[
−2
−3
−3
]
⇒ ut+1
i= sgn
[
4 −
∣
∣
∣
∣
1 − 2ut
i−1 − 3ut
i − 3ut
i+1
∣
∣
∣
∣
]
227 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 7ut
i−1 + 4ut
i + 2ut
i+1
∣
∣
∣
∣
]
⇒ b227
=
[
−7
4
2
]
T′
22−→ b110
=
[
−2
−7
−4
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 2ut
i−1 − 7ut
i − 4ut
i+1
∣
∣
∣
∣
]
218 ut+1
i= sgn
[
5 −
∣
∣
∣
∣
1 − 4ut
i−1 + 3ut
i − 4ut
i+1
∣
∣
∣
∣
]
⇒ b218
=
[
−4
3
−4
]
T′
9−→ b110
=
[
−3
−4
−4
]
⇒ ut+1
i= sgn
[
5 −
∣
∣
∣
∣
1 − 3ut
i−1 − 4ut
i − 4ut
i+1
∣
∣
∣
∣
]
217 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 + ut
i−1 − 6ut
i + 4ut
i+1
∣
∣
∣
∣
]
⇒ b217
=
[
1
−6
4
]
T′
5−→ b110
=
[
−1
−6
−4
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − ut
i−1 − 6ut
i − 4ut
i+1
∣
∣
∣
∣
]
211 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 7ut
i−1 + 3ut
i − ut
i+1
∣
∣
∣
∣
]
⇒ b211
=
[
−7
3
−1
]
T′
12−→ b110
=
[
−1
−3
−7
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − ut
i−1 − 3ut
i − 7ut
i+1
∣
∣
∣
∣
]
203 ut+1
i= sgn
[
5 −
∣
∣
∣
∣
3 + 4ut
i−1 − 4ut
i + ut
i+1
∣
∣
∣
∣
]
⇒ b203
=
[
4
−4
1
]
T′
18−→ b110
=
[
−1
−4
−4
]
⇒ ut+1
i= sgn
[
5 −
∣
∣
∣
∣
3 − ut
i−1 − 4ut
i − 4ut
i+1
∣
∣
∣
∣
]
199 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 + 4ut
i−1 − 7ut
i − 2ut
i+1
∣
∣
∣
∣
]
⇒ b199
=
[
4
−7
−2
]
T′
6−→ b110
=
[
−2
−7
−4
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 2ut
i−1 − 7ut
i − 4ut
i+1
∣
∣
∣
∣
]
(b)-4
3815

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
188 ut+1
i= sgn
[
6 −
∣
∣
∣
∣
4 − 5ut
i−1 − 5ut
i + ut
i+1
∣
∣
∣
∣
]
⇒ b188
=
[
−5
−5
1
]
T′
4−→b110
=
[
−1
−5
−5
]
⇒ ut+1
i= sgn
[
6 −
∣
∣
∣
∣
4 − ut
i−1 − 5ut
i − 5ut
i+1
∣
∣
∣
∣
]
185 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 + ut
i−1 + 3ut
i − 7ut
i+1
∣
∣
∣
∣
]
⇒ b185
=
[
1
3
−7
]
T′
8−→b110
=
[
−1
−3
−7
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − ut
i−1 − 3ut
i − 7ut
i+1
∣
∣
∣
∣
]
181 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 7ut
i−1 − 5ut
i + 7ut
i+1
∣
∣
∣
∣
]
⇒ b181
=
[
−7
−5
7
]
T′
10−→b110
=
[
−5
−7
−7
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 5ut
i−1 − 7ut
i − 7ut
i+1
∣
∣
∣
∣
]
173 ut+1
i= sgn
[
12 −
∣
∣
∣
∣
4 + 5ut
i−1 + ut
i − 11ut
i+1
∣
∣
∣
∣
]
⇒ b173
=
[
5
1
−11
]
T′
19−→b110
=
[
−1
−11
−5
]
⇒ ut+1
i= sgn
[
12 −
∣
∣
∣
∣
4 − ut
i−1 − 11ut
i − 5ut
i+1
∣
∣
∣
∣
]
167 ut+1
i= sgn
[
9 −
∣
∣
∣
∣
3 + 5ut
i−1 − 3ut
i − 5ut
i+1
∣
∣
∣
∣
]
⇒ b167
=
[
5
−3
−5
]
T′
7−→b110
=
[
−3
−5
−5
]
⇒ ut+1
i= sgn
[
9 −
∣
∣
∣
∣
3 − 3ut
i−1 − 5ut
i − 5ut
i+1
∣
∣
∣
∣
]
157 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 5ut
i−1 − 6ut
i + 6ut
i+1
∣
∣
∣
∣
]
⇒ b157
=
[
−5
−6
6
]
T′
3−→b110
=
[
−5
−6
−6
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 5ut
i−1 − 6ut
i − 6ut
i+1
∣
∣
∣
∣
]
155 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 5ut
i−1 + 7ut
i − 7ut
i+1
∣
∣
∣
∣
]
⇒ b155
=
[
−5
7
−7
]
T′
1−→b110
=
[
−5
−7
−7
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
2 − 5ut
i−1 − 7ut
i − 7ut
i+1
∣
∣
∣
∣
]
124 ut+1
i= sgn
[
9 −
∣
∣
∣
∣
1 − 8ut
i−1 − 7ut
i − 6ut
i+1
∣
∣
∣
∣
]
⇒ b124
=
[
−8
−7
−6
]
T′
17−→b110
=
[
−6
−8
−7
]
⇒ ut+1
i= sgn
[
9 −
∣
∣
∣
∣
1 − 6ut
i−1 − 8ut
i − 7ut
i+1
∣
∣
∣
∣
]
(b)-5
3816

March
7,2005
10:1001176
Table 30. (Continued )
N Difference Equation NT
′
k
−→ 110 Difference Equation for 110
122 ut+1
i= sgn
[
6 −
∣
∣
∣
∣
2 − 4ut
i−1 − 2ut
i − 4ut
i+1
∣
∣
∣
∣
]
⇒ b122
=
[
−4
−2
−4
]
T′
16−→ b110
=
[
−2
−4
−4
]
⇒ ut+1
i= sgn
[
6 −
∣
∣
∣
∣
2 − 2ut
i−1 − 4ut
i − 4ut
i+1
∣
∣
∣
∣
]
118 ut+1
i= sgn
[
9 −
∣
∣
∣
∣
2 + ut
i−1 + 7ut
i + 4ut
i+1
∣
∣
∣
∣
]
⇒ b118
=
[
1
7
4
]
T′
15−→ b110
=
[
−1
−4
−7
]
⇒ ut+1
i= sgn
[
9 −
∣
∣
∣
∣
2 − ut
i−1 − 4ut
i − 7ut
i+1
∣
∣
∣
∣
]
110 ut+1
i= sgn
[
9 −
∣
∣
∣
∣
2 − 6ut
i−1 − 7ut
i − 7ut
i+1
∣
∣
∣
∣
]
⇒ b110
=
[
−6
−7
−7
]
T′
0−→ b110
=
[
−6
−7
−7
]
⇒ ut+1
i= sgn
[
9 −
∣
∣
∣
∣
2 − 6ut
i−1 − 7ut
i − 7ut
i+1
∣
∣
∣
∣
]
103 ut+1
i= sgn
[
7 −
∣
∣
∣
∣
2 − 4ut
i−1 + 6ut
i + 6ut
i+1
∣
∣
∣
∣
]
⇒ b103
=
[
−4
6
6
]
T′
2−→ b110
=
[
−4
−6
−6
]
⇒ ut+1
i= sgn
[
7 −
∣
∣
∣
∣
2 − 4ut
i−1 − 6ut
i − 6ut
i+1
∣
∣
∣
∣
]
94 ut+1
i= sgn
[
7 −
∣
∣
∣
∣
2 + 4ut
i−1 + 2ut
i + 4ut
i+1
∣
∣
∣
∣
]
⇒ b94
=
[
4
2
4
]
T′
11−→ b110
=
[
−2
−4
−4
]
⇒ ut+1
i= sgn
[
7 −
∣
∣
∣
∣
2 − 2ut
i−1 − 4ut
i − 4ut
i+1
∣
∣
∣
∣
]
91 ut+1
i= sgn
[
6 −
∣
∣
∣
∣
2 + 5ut
i−1 − 3ut
i + 5ut
i+1
∣
∣
∣
∣
]
⇒ b91
=
[
5
−3
5
]
T′
23−→ b110
=
[
−3
−5
−5
]
⇒ ut+1
i= sgn
[
6 −
∣
∣
∣
∣
2 − 3ut
i−1 − 5ut
i − 5ut
i+1
∣
∣
∣
∣
]
62 ut+1
i= sgn
[
6 −
∣
∣
∣
∣
1 + 4ut
i−1 + 4ut
i + 2ut
i+1
∣
∣
∣
∣
]
⇒ b62
=
[
4
4
2
]
T′
13−→ b110
=
[
−2
−4
−4
]
⇒ ut+1
i= sgn
[
6 −
∣
∣
∣
∣
1 − 2ut
i−1 − 4ut
i − 4ut
i+1
∣
∣
∣
∣
]
61 ut+1
i= sgn
[
8 −
∣
∣
∣
∣
1 + 3ut
i−1 + 7ut
i − 2ut
i+1
∣
∣
∣
∣
]
⇒ b61
=
[
3
7
−2
]
T′
20−→ b110
=
[
−2
−3
−7
]
⇒ ut+1
i= sgn
[
8 −
∣
∣
∣
∣
1 − 2ut
i−1 − 3ut
i − 7ut
i+1
∣
∣
∣
∣
]
(b)-6
3817

March 7, 2005 10:10 01176
3818 L. O. Chua et al.
(a)
(b)
Fig. 17. (a) Definitions of the three global equivalence-class transformations T†, T, and T
∗, and the multiplication tableassociated with the abstract Vierergruppe V. Observe that each element of V is equal to its inverse, as depicted by the twosimilarly-directed arcs connecting each pair of nodes in the digraph. Hence, unlike the three cyclic 4-element subgroups C4
from Table 17, no element of V is a generating element. Observe, however, that T∗ = −T
†. The symbol T0 denotes the 4× 4identity matrix. (b) Commutation diagram of V.

March 7, 2005 10:10 01176
A Nonlinear Dynamics Perspective of Wolfram’s New Kind of Science. Part III 3819
obtained indeed a set of 23 distinct vectors for b 110 ,as displayed in Tables 30(b)-4, 30(b)-5 and 30(b)-6.Hence, together we can find 24 distinct parameter
vectors b N , which map into 24 distinct parameter
vectors b 110 .
5. Concluding Remarks
It is important to recall that the elements of theVierergruppe V defined in Table 14 are 3 × 3 ma-
trices {T0, T†u, Tu, T∗
u} defined in the upper partof Figs. 10, 11 and 12. The actual transformations,however, that allow us to establish the long-term
correlations among members of each of the 89 global
equivalence classes εκm listed in Table 3 are 4×4 ma-
trices {T†, T, T∗}, without the subscript u, which
were derived from {T†u, Tu, T∗
u}. Since the mem-
bers of each pair {T†u, T†}, {Tu, T}, {T∗
u, T∗}can be identified uniquely with each other, it suf-fices to use the same name left-right transforma-
tion, global complementation, and left-right comple-
mentation for T†, T, and T∗, respectively. More-over, Fig. 17(a) shows that since they are relatedby exactly the same group multiplication table asTable 14, they too are isomorphic to the Vier-
ergruppe V. This is the only abstract group whichmakes it possible to predict the long-term correla-
tions among all members of the four remarkable lo-cal rules {193, 137, 124, 110}. Since the local rule
110 has been proved in [Wolfram, 2002] to be capa-ble of universal computation, it follows that all fourlocal rules are universal Turing machines. The uni-
versality of the four local rules 110 , 124 , 137 ,
and 193 and their identical long-term dynamic be-haviors, modulo a transformation from the Vier-ergruppe V, are encapsulated in the commutative
diagram shown in Fig. 17(b).We remark that while Wolfram had suggested,
without proof, in [Wolfram, 2002] that the three
other local rules 124 , 137 , and 193 are alsouniversal, this paper not only proves that his sug-gestion is correct, but also that the four local rules110 , 124 , 137 , and 193 are identical from anonlinear dynamics perspective.
Notwithstanding the fundamental importanceof the above universality result, we remark that our
original goal was not in fact to prove Wolfram’sconjecture, but rather to exploit the symmetry ofthe Boolean cubes13 in order to identify equivalence
classes among the 256 rules. Our discovery of theVierergruppe V and the rotation group R had ledto the two major logical classifications14 of the 256local rules into 89 global equivalence classes εκ
m,and 30 local equivalence classes Sκ
m. Our proof ofWolfram’s conjecture should be viewed thereforemerely as a bonus from this broader perspective. Inparticular, the singular significance of the 89 global
equivalence classes εκm is similar in spirit to the
classification of computational algorithms into var-ious complexity classes, e.g. the NP-complete class,in the sense that any property that applies to onemember of εκ
m automatically applies to the othermembers in the same global equivalence class.
To illustrate another application of the global-equivalence property, observe that since the global-equivalence class ε1
39 from Table 2 includes only the
local rule 232 (Fig. 2), which implements a “local”(among 3 neighboring cells) majority rule, it fol-lows that there are no other local rules among the256 rules that are globally equivalent to 232 viathe Vierergruppe V. Conversely, since the global-equivalence class ε3
9 from Table 4 includes two lo-
cal rules 184 (Fig. 4) and 226 , it follows thatboth local rules implement a perfect density classi-
fication task (including the density equal to 12 case)
[Capcarrere et al., 1996]. In particular, both repre-sent a “global” (among all n + 1 neighboring cells)majority rule.
While the impact of the 30 local equivalenceclasses Sκ
m from the conventional cellular automataperspective is not as impressive as the global equiv-alence classes, we believe its importance will comefrom the information technology arena where imple-mentation cost of one local rule in hardware, e.g. asilicon chip, can differ dramatically from one choiceof design parameters, to another equally valid butmuch less costly and more robust choice.
Finally, we remark that our theory of globaland local equivalence classes can be general-ized to higher-dimensional cellular nonlinear net-
works (CNN) [Chua & Roska, 2002] where two-dimensional cellular automata represents a rathertrivial subclass.
13The representation of the local rules via 256 Boolean cubes was first presented in page 169 of [Chua, 1998]. Exploitation ofthe geometry of these Boolean cubes had led to the discovery of most of the results presented in all three parts of this series.14In contrast, the classification scheme by Wolfram into four classes is based not on mathematical rigor, but empirical taxon-omy, the classification method widely used in botany and zoology, before the advent of DNA identification.

March 7, 2005 10:10 01176
3820 L. O. Chua et al.
Acknowledgments
We thank Dr. Istvan Szatmari for constructive sug-gestions. This paper is supported in part by theDURINT contract no. N00014-01-0741, the MURIcontract no. N00014-03-1-0698, and the MARCOMicroelectronics Advances Research CorporationFENA Award no. 442521/WK57015.
References
Capcarrere, M. S., Sipper, M. & Tomassini, M. [1996]“A two-state r = 1 cellular automaton that classifiesdensity,” Phys. Rev. Lett. 77, 4969–4971.
Chua, L. O. [1998] CNN : A Paradigm for Complexity
(World Scientific, Singapore).
Chua, L. O. & Roska, T. [2002] Cellular Neural Networks
and Visual Computing (Cambridge University Press).Chua, L. O., Yoon, S. & Dogaru, R. [2002] “A nonlin-
ear dynamics perspective of Wolfram’s new kind ofscience. Part I: Threshold of complexity,” Int. J. Bi-
furcation and Chaos 12, 2655–2766.Chua, L. O., Sbitnev, V. I. & Yoon, S. [2003] “A non-
linear dynamics perspective of Wolfram’s new kind ofscience. Part II: Universal neuron,” Int. J. Bifurcation
and Chaos 13, 2377–2491.Hamermesh, M. [1962] Group Theory and its Applica-
tions to Physical Problems (Addison-Wesley, Reading,MA).
Wiener, N. [1958] Nonlinear Problems in Random
Theory (John Wiley, NY).Wolfram, S. [2002] A New Kind of Sciences (Wolfram
Media, Inc., Champaign Illinois USA).

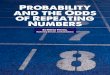

![A NONLINEAR DYNAMICS PERSPECTIVE OF WOLFRAM’S NEW KIND …nonlinear.eecs.berkeley.edu/CellularAutomata/PartII.pdf · in A New Kind of Science [Wolfram, 2002] for the one-dimensionalbinaryCellular](https://img.pdfslide.us/doc/110x75/5ff5c0f683eff57983406834/a-nonlinear-dynamics-perspective-of-wolframas-new-kind-in-a-new-kind-of-science.jpg)










![Developing an Interactive Communicative Search Agent · it is still being developed and it has been yet to see whether Wolfram’s compu-2. tational approach[9] will yield the same](https://img.pdfslide.us/doc/110x75/60ff386168c520035d0ae106/developing-an-interactive-communicative-search-agent-it-is-still-being-developed.jpg)







![CellularAutomata-BasedParallelRandomNumber ...2 International Journal of Reconfigurable Computing produces an unrepeatable sequence of random numbers [17]. Both types of random number](https://img.pdfslide.us/doc/110x75/60ce1124f3b844026f2272de/cellularautomata-basedparallelrandomnumber-2-international-journal-of-reconigurable.jpg)