Embed Size (px)
Citation preview

COMMUNICATIONS IN NUMERICAL METHODS IN ENGINEERING, VOl. 9, 15-20 (1 993)
A NEW PLATE SHELL ELEMENT OF 16 NODES AND 40 DEGREES OF FREEDOM BY RELATIVE
DISPLACEMENT METHOD
XING XU AND RUIFENG CAI Department of Mechanics. Zhejiang University, Hangzhou 310027. P.R. China
SUMMARY An isoparametric plate shell element of 16 nodes and 40 degrees of freedom is developed in this paper directly from 3-D elastic theories. In order to overcome the difficulties caused by straightforward use of a 3-D formulation, the relative displacement method is introduced. For curved shell elements, the use of the orthogonal curvilinear co-ordinate system greatly reduces the computer effort. The new element can conveniently solve shell problems with variable thicknesses and also easily link with other finite elements using displacement d.0.f. such as 8-node to 21-node 3-D elements. Numerical examples demonstrate the efficiency of the element.
1 . INTRODUCTION
Derived from the 3-D isoparametric element, the 8-node general shell element in the Cartesian co-ordinate system’” has quite good overall performance. As there exists the co-ordinate transformation, more computer time is needed to run a problem. To eliminate this time-costing co-ordinate transformation, Li4 introduced the orthogonal curvilinear co-ordinate system into the element, which largely saved computational time and resulted in a more excellent shell element. But these two curved shell elements have two rotational components, and their formulation is still a bit complex. The two non-displacement components also make them inconvenient to link with other 3-D elements using displacement d.0.f. Therefore, it seems natural trying to employ 3-D formulation to construct a plate shell element with simpler formulation. As is indicated in Reference 1 , it is indeed feasible to do so. The work in the present paper was such an attempt to establish a new element directly based on 3-D formulation, and it proved to be a success.
However, the results offered by such an element with 48 d.0.f. would converge to a false solution, as is pointed out in Reference 1 . But if we use the two usual shell assumptions that the stresses and strains in the direction of plate shell normals are both assumed zero, then the correct convergence of the element can be guaranteed. The second hypothesis also makes the element possible to have only 40 degrees of freedom with the other eight eliminated.
2. FORMULATION OF PLATE ELEMENT
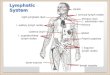
Figure 1 shows the 16-node platelshell element degenerated from a 20-node 3-D element. As is the usual practice, a relationship between the Cartesian co-ordinates of any point of the
0748-80251 9310 100 1 5-06%08.00 0 1993 by John Wiley & Sons, Ltd.
Received 21 May 1990 Revised 20 January 1992

16 XING XU AND RUIFENG CAI
Figure 1. Degenerated 16-node platelshell element
element and the natural co-ordinates can be written as
where the shape function Ni can be expressed as
N i ( L ? , l ) = ( l + l l i)Noi(t ,v)/2 (i= 192, -a. 16) (2) in which Noi([, q ) is the standard parabolic shape function of the 2-D 8-node isoparametric element and No, = Noi ( j = i + 8 , i = 1 ,2 , ..., 8).
Similarly, using the same shape function Ni we have the displacement field with respect to the global co-ordinate system as follows:
where [N] = [ N J N2I ... N161], ( S i ) = [Ui ui wilT with [I] being a 3 x 3 identity matrix.
as Using the geometric equations of 3-D elasticity problems, the strain vector (4 can be written
where
is the strain submatrix. According to the standard process of the finite-element method, the element stiffness matrix
can be derived by taking advantage of the virtual work principle. Its 3 x 3 submatrix [k~] has

A NEW PLATE SHELL ELEMENT 17
the form of
where [D] is the elasticity matrix.
3. FORMULATION OF CURVED SHELL ELEMENT IN THE ORTHOGONAL CURVILINEAR CO-ORDINATE SYSTEM
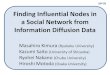
For a general shell element as illustrated in Figure 2, an orthogonal curvilinear co-ordinate system can be set up by erecting a normal y to the shell mid-surface with two other co- ordinates a, p along the directions of two main curvatures, respectively, of the shell mid-plane.
Similarly, we still assume
and
Here u, u and w are displacement components of any point in the element along the co- ordinates a, p and y, respectively. Please see equation (2) for Ni.
The strain vector can be again written as 16
i= 1 = [€a Y B ~ yyal = C [ B ~ I (6i1
in which the strain submatrix [Bi] can be expressed as
[Bil =
with H I , HZ and H3 being Lamb coefficients along the co-ordinates a, p and y, respectively. Note that the co-ordinate y along the normal direction is usually linear with a general magnitude of length, and we subsequently have H3 = 1 and aH3/aa = aH,/dfi = 0. Thus,

18 XING XU AND RUIFENG CAI
Figure 2. Shell element
equation (11) can be simplified to the following form:
[Bil =
Also the stiffness submatrix [kij] can be expressed as follows:
Now we have got the general expressions of the element stiffness submatrix and strain submatrix of the shell element in the orthogonal curvilinear co-ordinate system. These expressions are of the same form for different types of shells. The concrete representations of parameters concerned can be worked out if a specific type of shell is employed. Consequently, the element stiffness matrices can be conveniently acquired for various classes of shells without penalties to derive again from the beginning every time.
4. MODIFICATION OF THE ELEMENT STIFFNESS EQUATION
The stiffness matrix so constructed may be ill-conditioned and consequently an inaccurate solution will be given. Now we introduce the relative displacement method to the elements so that the numerical accuracy and properties of the elements can be improved.

A NEW PLATE SHELL ELEMENT 19
With the standard process we have the element stiffness equation
( W e = [k1161e
Let
Uj=Ui+AUi
Vj=Vi+AVi ( j = i + 8 , i = 1,2, ..., 8 ) (14) wj=Wi+AWi
or in another form
(6j) = (6i) + (Ail ( j = i + 8, i = 1,2, ..., 8) (15) Thus the nodal displacement column vector (6) can be written as
Placing equation (16) into equation (13) and then multiplying its left-hand side by [A]', we have
[R*) = [k*] ( 6*] (17)
[k*l = [AI'FI [A], lR*le= [AITIR)' (18)
where
Thus we obtained the modified element stiffness equation with the relative displacements involved.
In the above discussions, the constraint of straight normals is still introduced, along with the assumption of zero stresses in normal directions. Besides, the strain component along the normal can also be neglected in reality as it is actually very small compared with the other strain components, so that the element d.0.f. can be reduced from 48 to 40 and thus the elements with improved economy become available. With equation (17) obtained, this can be easily achieved by merely letting in equation (14):
A W i = O ( i = 1,2, ..., 8) ( 194 for plate element and curved shell element in the orthogonal curvilinear co-ordinate system and
Aw/ = O ( i = 1,2, ,..., 8 ) ( 19b) for the general shell element in the local orthogonal co-ordinate system.
5. NUMERICAL EXAMPLES Here we only give two shell examples to show the efficiency of the element. A 2 x 2 x 2 Gauss integration scheme was used to give the most satisfactory results.
5.1. A pinched cylinder with diaphragmed ends'
Table 1 shows the normalized values of the deflection w coincident with the load point of a pinched cylinder with diaphragmed ends acted by a pair of concentrated loads P. Other solutions were all obtained from Reference 3. Results under the two conditions of A w = 0 and A w +F 0 are presented in Table I to show the effect of the assumption A w = 0.

20 XING XU AND RUIFENG CAI
Table I. Normalized solutions for pinched cylinder with diaphragms
This solution 4-node 9-node 9-node 9-node 9-node
Mesh A w = O A w S O SRI SRI 3 x 3 ya T - - $
2 x 2 0.590 0.594 0.373 0-239 0.050 0.743 0.737 4 x 4 0.898 0.927 0-747 0-773 0.161 0.927 0-961 5 x 5 0.948 0.979 6 x 6 0.967 0.998 8 x 8 0-981 1 *012 0.935 0.856 0.564 0.986 0.999
Table 11. Solutions for cylindrical roof by the conical shell element in the orthogonal curvilinear co- ordinate system (AW= 0)
Mesh 1OoWc 1OWB 1OUB 10024~ NXB N ~ B MOB Moc MXB
Thissolution 2 x 2 4.303 -2.949 -1.566 1.204 76-44 11.37 -0,108 2.188 -0.7183 4 x 4 4.611 -3.042 -1.607 1.251 76.74 6.38 -0.089 2,109 -0.6472 5 x 5 4,604 -3.037 -1.604 1.250 76.61 3.99 -0.058 2.088 -0.6471
Solution 76- 13 -0.142 2.395 -0.6687 ref. 4 2 x 2 4'405 -3.001 -1*593 1.238 55.94 -0.211 -0.122 2.322 -0.7127
Solution 75-17 -0.136 2.313 -0.6623 ref. 2 2 x 2 4'175 -2.901 -1'534 1.228 55-84 -0.495 -0.160 2.258 -0.7027
Theoretical 4.60 -3.086 -1.636 1.261 76.95 0 0 2.056 -0.660 solution'
5.2. Cylindrical roof2 For this cylindrical roof with both ends diaphragmed and loaded vertically (in the
z-direction) by its uniform dead weight, Table I1 lists some values given by the conical shell element. Numerical data in Table I1 show very well both the convergence and convergence rate of the shell elements given here.
6. CONCLUSIONS
Numerical examples show that the new plate shell element directly derived from 3-D formulation is successful. It not only converges to exact solutions, but also gives very good accuracy. With its very concise formulation and excellent performance, we believe that it is an efficient element for general analysis of plates and shells.
REFERENCES 1. 0. C. Zienkiewicz, The Finite Element Method, 3rd edn. McGraw-Hill, Maidenhead, Berkshire, 1977. 2. R. D. Cook, Concepts and Applications of Finite Element Analysis, John Wiley, 1974. 3. T. Belytschko, B. L. Wong and H. Stolarski, 'Assumed strain stabilization procedure for the 9-node
4. W. C. Li, G . P. Chen and H. J. Ding, 'The curved shell element in the orthogonal curvilinear Lagrange shell element', Int. j . numer. methods eng., 28, 385-414 (1989).
co-ordinate system', Comp. Struct. Mech. & Appl., Vol. 1, No. 2, 31-40 (1984).

















![Interference Alignment and Spatial Degrees of · 2008-02-01 · of degrees of freedom with K interfering nodes is K/2, also presented in [7]. The unresolved gap between the inner](https://img.pdfslide.us/doc/110x75/5f630bee02e10e7aac125040/interference-alignment-and-spatial-degrees-of-2008-02-01-of-degrees-of-freedom.jpg)





![Partitioned Fluid-Structure Interaction Techniques Applied ... · FEM bearing model [3], from which only the degrees of freedom of the nodes placed on the internal 15 bearing surface](https://img.pdfslide.us/doc/110x75/602213974a61943665711eca/partitioned-fluid-structure-interaction-techniques-applied-fem-bearing-model.jpg)



