Embed Size (px)
Citation preview

Aae
Sa
b
c
d
a
A
R
R
5
A
P
K
I
G
P
F
T
N
B
N
1
Dii
2
0d
e c o l o g i c a l m o d e l l i n g 2 0 5 ( 2 0 0 7 ) 13–28
avai lab le at www.sc iencedi rec t .com
journa l homepage: www.e lsev ier .com/ locate /eco lmodel
new computational system, DOVE (Digital Organisms inVirtual Ecosystem), to study phenotypic plasticity and its
ffects in food webs
cott D. Peacora,b,∗, Stefano Allesinaa,b,c, Rick L. Riolod, Tim S. Hunterb
Department of Fisheries and Wildlife, Michigan State University, East Lansing, MI 48824, USAGreat Lakes Environmental Research Laboratory (National Oceanic and Atmospheric Administration), Ann Arbor, MI 48105, USADepartment of Ecology and Evolutionary Biology, University of Michigan, Ann Arbor, MI 48109, USACenter for the Study of Complex Systems, University of Michigan, Ann Arbor, MI 48109, USA
r t i c l e i n f o
rticle history:
eceived 5 December 2005
eceived in revised form
January 2007
ccepted 30 January 2007
ublished on line 25 April 2007
eywords:
ndividual-based model
enetic algorithm
henotyipic plasticity
ood web
rait-mediated
onlethal
ehavior
a b s t r a c t
Food webs are abstract models that represent who eats whom relationships in ecosystems.
Classical food web representations do not typically include phenotypic plasticity, in which
one species responds to changes in density of other species by modifying traits such as
behavior and morphology. Such changes, which are presumably adaptive, will affect the
magnitude of both direct and indirect effects on species fitness. Empirical evidence suggests
that phenotypic plasticity is likely to have large impacts on the structure and dynamics of
ecological communities. Whereas theoretical studies support this, there is much that we
do not understand that may require new theoretical approaches. We have constructed a
computational system, Digital Organisms in a Virtual Ecosystem (DOVE), to address this
problem. Its features include an individual-based approach, in which a type of genetic algo-
rithm is used to evolve animal behavior in a dynamic environment. Here we present an
overview of the ecological problems motivating the creation of DOVE and its basic structure
and operation. We also discuss the kinds of decisions and tradeoffs that were considered
to make DOVE as simple as possible but still rich enough to allow us to address our fun-
damental questions. We then use DOVE to examine optimal foraging strategies of prey in
onconsumptive the presence of fluctuating predator risk, and show that activity levels are highly dependent
on competitor density in a manner that would be difficult or impossible to explore with
traditional techniques. This, and other pilot studies of DOVE, suggests that it can be used to
gain insight into the origin and consequences of phenotypic plasticity and other properties
of ecological communities.
It is critical that models accurately capture the underlying
. Introductioneveloping modeling approaches that capture and elucidatemportant structural and dynamical properties of food webss of fundamental importance to further our understanding
∗ Corresponding author at: Great Lakes Environmental Research Laborat945, USA. Tel.: +1 734 741 2447.
E-mail address: [email protected] (S.D. Peacor).304-3800/$ – see front matter © 2007 Elsevier B.V. All rights reserved.oi:10.1016/j.ecolmodel.2007.01.026
© 2007 Elsevier B.V. All rights reserved.
of natural ecological communities (de Ruiter et al., 2005).
ory (NOAA), 2205 Commonwealth Boulevard, Ann Arbor, MI 48105-
mechanisms that are integral to the structure and functionof real ecological systems. However an important componentof ecological communities, phenotypic plasticity, is often not

l i n g
14 e c o l o g i c a l m o d e lincluded in food web models. Ecologists are becoming increas-ingly aware of the prevalence and potential consequencesto ecological communities of phenotypic plasticity (Tollrainand Harvell, 1999; Agrawal, 2001; West-Eberhard, 2003; Lima,1998). Organisms often respond to short-term environmen-tal changes by modifying their phenotypes, including traitssuch as behavior, morphology, or life history. Many prey, forexample, respond to predators by reducing their activity, byincreasing their use of refuges, or by modifying their move-ment characteristics such as speed. Clearly prey will respondto predators when attacked, but the phenotypic responses werefer to here are more persistent and pervasive than imme-diate or initial responses. For example, birds will undoubtedlyflee from an attacking predator, but their phenotypic responsemay be increased vigilance while foraging on longer timescales as a result of a perceived increased in predation threat(Caraco et al., 1980; Lima et al., 1999).
Phenotypic plasticity is an important and pervasive fea-ture of ecological communities, and should therefore beincorporated into food web models. Phenotypic plasticityintroduces nonlinearities into and strongly affects the func-tional response of predator-prey interactions (Abrams, 1987,1990, 2001). Theory suggests these changes can stronglyaffect population and community dynamics (Abrams, 1987,1992, 1995; Ives and Dobson, 1987; Krivan, 2003; Luttbeg andSchmitz, 2000; Vos et al., 2004; reviewed in Bolker et al., 2003).In addition, indirect effects can be introduced if the focalspecies responds to a second species by modifying a traitwhich in turn alters the nature of the interactions of the focalspecies with others in the system. For example, in naturalsystems, the acquisition of resources is often tightly associ-ated with activity level, but activity also relates strongly tovulnerability to predators (Werner and Anholt, 1993; Lima,1998). This tradeoff means that if a prey responds to a preda-tor by modifying its foraging rate or habitat preference, thenany interactions between the prey species and its resourcesare also affected. In this way, predators can indirectly affectresource species via the prey species, without actually con-suming the prey (Turner and Mittelbach, 1990; Abrams et al.,1996; Peacor and Werner, 1997, 2001; Peckarsky and McIntosh,1998; Trussell et al., 2002). Such indirect interactions aretermed ‘trait-mediated indirect interactions’ (also behavioralindirect interactions, Miller and Kerfoot, 1987, interactionmodifications, Wootton, 1993), to distinguish them from‘density-mediated indirect interactions’ (Abrams et al., 1996)which are linked direct interactions affecting species den-sity (especially through consumption). Trait-mediated indirectinteractions extend to other multiple species interactions (i.e.other than trophic cascades as in the example) and have beendemonstrated in diverse systems (reviewed in Werner andPeacor, 2003; Schmitz et al., 2004; Miner et al., 2005). Empir-ical work and simple theoretical considerations indicate thattrait-mediated indirect interactions can contribute strongly tothe net effect of species interactions (Abrams, 1984; Peacorand Werner, 2001, 2004; Krivan and Schmitz, 2004; Holker andMehner, 2005).
The general theoretical approach used to examine theeffect of phenotypic plasticity on population and communitydynamics is to modify existing theoretical models that usecoupled differential equations, by adding and modifying equa-
2 0 5 ( 2 0 0 7 ) 13–28
tions that describe the magnitude and functional response ofspecies interactions. Assuming that organisms behave adap-tively, parameters that describe phenotype are expressed asa function of species densities and their magnitude is cho-sen to maximize fitness. For example, Ives and Dobson (1987)introduced parameters that describe foraging effort as a func-tion of predator density. They found that phenotypic plasticityincreased predator-prey oscillations, and thereby decreasedstability of predator and prey abundance. Luttbeg and Schmitz(2000) used a similar approach that reinforced these findings,but they additionally show that the relative timing of phe-notypic responses is important. If, for example, phenotypicresponses result from imperfect knowledge of predation risk,phenotypic plasticity can stabilize predator-prey dynamics.The effect of a number of other factors in different food webconfigurations have also been examined (e.g. Krivan, 2003;Krivan and Schmitz, 2003, 2004; Vos et al., 2004; reviewed inBolker et al., 2003) so the above examples serve only to illus-trate how this general theoretical approach has elucidatedthe manner in which phenotypic plasticity can influence pop-ulation dynamics and the magnitude of species direct andindirect interactions.
Whereas the theoretical models such as those describedabove have increased our understanding of the conse-quences of phenotypic plasticity, limitations arise whenusing traditional analytic approaches to understand the roleof phenotypic plasticity in the evolution and dynamics offood webs. A broad group of limitations arises from gen-eral assumptions made about ecological communities inthese models. One such assumption is that the dynamicsof a few species are tightly coupled and that the effectof phenotypic plasticity therefore arises by influencing themagnitude of the component species population oscillations.However, species densities are typically influenced by mul-tiple biotic and abiotic factors (Lawton, 1989; Cohen et al.,1990; Polis, 1991) that may additionally have large stochas-tic components. Thus many systems may not have inherentpredator-prey oscillations which phenotypic plasticity candampen or magnify. Assumptions are also required to specifyhow phenotypic plasticity will affect the functional responseof predators, and these assumptions can be critical since the-oretical studies indicate that the form of functional responsesgreatly influences model predictions (Abrams, 2001; Bolkeret al., 2003). However our empirical knowledge of theseresponses is greatly limited at this stage and it is not clearhow to derive functional responses from first principles.This is a difficult problem because environmental context,including the presence of other species, will affect the evo-lution and thus magnitude of species traits, which in turncan affect the magnitude and functional form of speciesinteractions (Hartvigsen and Levin, 1997; Abrams, 2001;Fellowes and Travis, 2000; Uriarte and Reeve, 2003; Beckerman,2005).
A second set of limitations arise when using traditionalapproaches to model the effects of phenotypic plasticitybecause they are not well suited to incorporating some poten-
tially influential factors. First, because mean field models areused, the interactions between individual organisms are notexplicitly represented. This precludes the potential for discov-ering and exploring difficult to predict “emergent” effects that
n g
mtabaapSraaiGescdaab
asenoWmmm(pocasctcdDec
2s
Oto
•
•
e c o l o g i c a l m o d e l l i
ay occur across organizational scales from the individual tohe community (Huston et al., 1988; Railsback, 2001; Grimmnd Railsback, 2005). We expect this is especially importantecause ecological communities are prototypical complexdaptive systems (CAS) (Holland, 1995; Levin, 1998) withdaptation occurring at the within-generation (phenotypiclasticity) and multiple-generation (evolution) timescales.econd, intraspecific variation is not represented. Clearlyeal populations are composed of heterogeneous individu-ls that vary both in their physical states (e.g., age and size)nd phenotypic traits that dictate the magnitude of speciesnteractions (cf. Lomnicki, 1988; Ebenman and Persson, 1988;rimm and Uchmanski, 2002; Grimm et al., 2005). Third, mod-ls examining the consequence of phenotypic plasticity omitpatial heterogeneity, which is known to affect population andommunity dynamics. Lastly, traditional techniques cannotetermine the adaptive behavior of organisms whose fitness isffected by multiple species, especially if associated feedbacksnd ensuing system dynamics affect each species’ adaptiveehavior.
As an alternative to traditional analytic population levelpproaches we have developed a computational modelingystem, Digital Organisms in a Virtual Ecosystem (DOVE), toxamine the origin and consequences to ecological commu-ities of phenotypic plasticity. In Section 2 we provide anverview of the general goals of and approach used in DOVE.e describe the basic architecture and components of DOVEodels in Section 3. We focus on the key components andechanisms, and on the kinds of decisions and tradeoffs thatust be faced when constructing an individual-based model
IBM) that is both as simple as possible, in order to be trans-arent and tractable, but rich enough to allow us to addressur fundamental questions. In order to show a specific appli-ation of some of DOVE’s features, in Section 4 we providesimple proof-of-concept example DOVE model. Model runs
how how, in a tri-trophic food chain, phenotypic plasticityan evolve in the intermediate consumer species in responseo variable predation risk, and show how the presence of aompetitor consumer affects that response. In Section 5 weiscuss some of the potential benefits and difficulties of usingOVE, and argue that this approach holds promise for uncov-ring important properties that shape and influence ecologicalommunities.
. DOVE—a computational system fortudying phenotypic plasticity
ur goal was to build a computational system that enabled uso explore questions concerning the origin and consequencesf phenotypic plasticity to food webs. These include:
How do various environmental factors, such as competi-tor presence, affect the evolution (and therefore magnitudeand functional form) of phenotypic plasticity (i.e. adaptiveresponses)?
How does phenotypic plasticity affect the structure anddynamics of food webs? Understanding the effect of pheno-typic plasticity on the distribution of interaction strengths,the functional response of species interactions, and the2 0 5 ( 2 0 0 7 ) 13–28 15
topology of the food web network, will all likely be integralto address this question.
• How do “realistic” properties of natural communities suchas spatial heterogeneity, individual-level variation in phe-notype, and age structure, affect the influence of phenotypicplasticity on the above properties?
To address these questions, we have developed DOVE,a computational system for implementing individual-basedmodels (IBMs) of food webs that consist of adaptive organismssubject to evolution by natural selection. In DOVE, populationsof model plants and animals (including predators, omnivores,herbivores) evolve and interact. This ecosystem is a spatiallandscape with multiple habitats that contain resources dis-tributed heterogeneously. Animals can be created with varyingdegrees of perception of environment factors (e.g., predators)and their own internal state (e.g., hunger), and their behaviorcan be a function of these perceptions. Species can there-fore exhibit phenotypic plasticity, although they need not.Strategies that determine behavioral responses vary betweenindividuals within a population and successful combinationsare inherited by offspring, with some small chance of muta-tion. In this way, optimal behaviors can evolve – includingthose that involve phenotypic plasticity. The basic premise ofDOVE is that we can gain insight into the nature of real eco-logical systems by allowing “digital” organisms to evolve in asimulated environment (a “virtual ecosystem”) that displaysparticular constraints important to the problem at hand. Inshort, DOVE models can represent food webs as CAS, in whichproperties at the population and community level arise fromthe interactions among individual organisms that adapt to adynamic environment.
As with any modeling approach, there are tensionsbetween creating models that are so simple they don’t includeimportant factors and processes, versus overly complicatedmodels that are hard to understand and explain. Thus DOVEincludes factors we believe are key to understanding the roleof phenotypic plasticity, using mechanisms that are as sim-ple as possible. For example, whereas perceptual capabilitiescan be arbitrarily complex, studying them is not presentlya goal for DOVE models. Thus the perceptual capabilities asdescribed below are fairly simple and once defined, fixed.However, those simple capabilities are rich enough to supportexperiments that explore a variety of situations in which phe-notypic responses to changes in external or internal state may(or may not) be useful. It would be possible to model more com-plex sensory attributes that include, e.g., imperfect or delayedinformation, if the questions being addressed by the modelrequire inclusion of those factors.
DOVE can best be viewed not as a particular model, butas a software platform for implementing a variety of spe-cific individual-based models of food webs. The differentfood webs could have different sets of species with differ-ent characteristics, capabilities and interactions, embedded inhabitats offering different sets of tradeoffs and opportunitiesfor the species to exploit. DOVE’s flexibility makes it possible
to design and run a range of related computational experi-ments, each designed to increase our understanding of thedynamics and population level mechanisms exhibited by par-ticular food webs. In the next section we describe the general
l i n g
16 e c o l o g i c a l m o d e lstructure and components of DOVE models. DOVE is writ-ten in ObjectiveC using the open-source Swarm class libraries(http://swarm.org).
3. DOVE model components andmechanisms
At the most abstract level, a DOVE model consists of popu-lations of virtual organisms-–plants and animals of differentspecies distributed across one or more habitats. DOVE definesa schedule of activity for the individual organisms, and it pro-vides the user with ways to control model runs and to collectand analyze the model output.
‘Habitats’ in DOVE represent both (a) the varying trade-offsbetween resource availability and risk of predation across dif-ferent habitats and (b) the explicit spatial distribution of plantsand animals within each habitat (Fig. 1).
‘Plants’ in DOVE represent the basal resources of food webs.Each plant species is defined by a growth function and ini-tial distribution across one or more habitats. Plants do notreproduce and are sessile (i.e., they grow, but do not spread).
‘Animals’ in DOVE represent the focal organisms whoseactions, distribution and dynamics are being studied. Eachanimal species is defined by a set of evolvable traits that deter-mine individual behavioral strategies, a fixed set of plants
Fig. 1 – Schematic of DOVE model with 2 habitats occupiedby 2 consumer species. Consumer species are identified asblue and red squares, whereas the various shades of greenrepresent different resource levels in cells without aconsumer. Multiple consumers may occupy a cell (notdisplayed in this figure). Individual consumers perform asingle action at each time step. They may (1)RemainInactive, (2) Eat (white arrows indicate possiblemoves for a consumer species with a MoveRadius equal to1), or (3) SwitchHabitat (black arrow indicates a consumerthat has switched from Habitat 2 to a randomly chosen cellin Habitat 1).
2 0 5 ( 2 0 0 7 ) 13–28
and/or animals it interacts with (as predator or prey) anda set of fixed characteristics (e.g., resource requirements forreproduction and movement characteristics). Animals selectfrom simple behavioral repertoires (remain inactive, eat/move,or switch habitat—see Fig. 1) in order to acquire resourcesand avoid death. Animal density changes as a result ofreproduction and death of individuals. Animals that acquiresufficient resources reproduce sexually and pass their traits totheir offspring allowing for evolution of behavior through therecombination and mutation of traits. Animals can die frompredation, starvation, age and exogenous factors.
‘Global Predators’ are a special type of animal whosenumber is not coupled to the number of other organismsthrough consumption or predation, but rather is an exogenousstochastic function that is set up by the user to define partic-ular patterns of predator risk. Using global predators allowsus to represent variable predation pressure, without the tightcoupling between predator and prey densities.
By including particular sets of habitats, plants and ani-mals, a DOVE model can represent various abiotic factorsand species relationships relevant to the effect of phenotypicplasticity on food-web structure and dynamics. In particular,models can be set up to include key tradeoffs that animals areforced to make, for example between different levels of pre-dation risk and resource acquisition that result from differentbehavioral choices (e.g., Werner and Anholt, 1993; Lima, 1998).For instance, parameters can be chosen such that eating andmoving increase resource acquisition at a cost of increasedpredation risk, whereas remaining inactive decreases preda-tion risk and decreases resource acquisition.
The rest of Section 3 describes in more detail each of themajor components in DOVE models – habitats, plants, ani-mals – and their interactions, as well as the basic activitiesand processes that generate the dynamical behavior of DOVEmodels. Parameters and variables are summarized in Table 1.Throughout the text we use italics for model parameters andbold italics for individual variables.
3.1. Habitats
A DOVE model includes one or more habitats. Each habi-tat consists of a toroidal grid of discrete locations, with zeroor more individual plants or animals in each location. Plantspecies have habitat-specific growth properties, thus allow-ing us to represent habitats with different amounts of basalresources. The pattern of variable predation by global preda-tors also can differ between habitats, as can the backgrounddeath rate. Animals can move from cell to cell within a partic-ular habitat, or they can move from one habitat to another (seeFig. 1 and Section 3.5). Moving among habitats may, for exam-ple, represent movement from one region of a pond to anotherto find more resources or to change their exposure to preda-tors. Thus differential plant and animal densities betweendifferent cells (and regions) within habitats explicitly repre-sents spatial heterogeneity facing the moving animals, andmodels with multiple, different habitats provide a direct way
to represent differential trade-offs that animals often face indifferent parts of a larger region. In order to simplify DOVEmodels, there is no spatial relationship between differenthabitats.
e c o l o g i c a l m o d e l l i n g 2 0 5 ( 2 0 0 7 ) 13–28 17
Table 1 – Parameters and variables of animals, plants, and species interactions
Parameter/variable name Description Section
Plants–state variablesBiomass An individual plant’s Biomass 3.2Location Cell occupied 3.2
Plants–fixed homogeneous parametersPlantGrowthRate Logistic equation growth rate parameter 3.2PlantCarryingCapacity Logistic equation carrying capacity parameter 3.2
Animals–state variablesBiomass Unit used to describe an animal’s energy content or size 3.3Location Cell occupied 3.3Age Time steps since birth 3.3StepsSinceReproduction Time steps that have passed since most recent reproduction 3.3
Animals–fixed homogeneous characteristicsInitialBiomass biomass at birth 3.3BiomassLoss biomass lost at each time step 3.3InitialAge age at birth 3.3MaximumAge age at death due to old age 3.3BackgroundDeathProbability probability of death due to causes not directly modeled 3.3EatRadius Distance an animal can eat during Eat action 3.5MoveRadius Maximum distance moved during Eat action 3.5FindBestProbability Probability to move to the most profitable cell during the Eat action 3.5ReproductionThreshold Biomass required to reproduce 3.8MinStepsForReproduction lower bound on time required to reproduce 3.8CrossoverProbability probability of crossover during reproduction 3.8MutationProbability probability that an individual gene will mutate during reproduction 3.8MutationVariance variance of gene mutation 3.8
Animal action probability parameters (“genes”)RemainInactive Remain on current cell without eating 3.5Eat Move to cell and eat in cells encompassed by EatRadius 3.5SwitchHabitat Move to a random location in another habitat 3.5
Species interactionsDietList List of prey items of an animal 3.6Refuge Fraction of a plant’s Bimoass not accessible to a particular animal herbivore 3.6.1AvailablePlantBiomass Fraction of a plant’s Bimoass accessible to a particular animal herbivore 3.6.1
ass esourcres an
3
P(icatpLp
B
wKtgbsr
EatFraction Fraction of AvailablePlantBiomAssimilationEfficiency Fraction of the consumed reCaptureProbability Probability a predator captu
.2. Plants
lants represent basal resources in DOVE food web modelsFig. 1). There is at most one plant from each plant speciesn each discrete location in a habitat. When a DOVE world isreated, plant biomass is distributed in cells randomly, i.e., themount placed in each cell is drawn from a normal distribu-ion with a user-defined mean and variance. Each individuallant is characterized by two state variables, its Biomass and itsocation (i.e., the x, y coordinate in the world). The growth of alant j in habitat i is determined by the Logistic Growth model
ji(t + 1) = Bji(t)
(1 + rji
(1 − Bji(t)
Kji
)), (1)
here Bji is the plant Biomass, rji is the PlantGrowthRate and
ji is the PlantCarryingCapacity of plant j in a cell belonging
o habitat i. Note, for simplicity, parameters describing plantrowth are the same for plants in all cells in the same habitat,ut introducing heterogeneity into these parameters is aimple and logical extension to DOVE. Plant biomass can beeduced through consumption by herbivorous animals.aten by an herbivore 3.6.1es converted into Biomass, 3.6.1, 3.6.2animal prey during a predation event 3.6.2, 3.6.3
3.3. Animals
Animals are the focal point of DOVE models. The foodweb structure is determined by the multiple predator-preypair-wise interactions that are either animal–animal oranimal–plant interactions. The ability of animals to gainresources and avoid death determines the abundance anddynamics of each population. Each species is defined interms of (1) variable, heterogeneous characteristics, includingstate variables and behavioral strategies that can vary acrossindividuals of the species, and (2) fixed, homogeneous char-acteristics, with common trait values shared by all membersof the species. In this section we present a broad overview ofthese characteristics, before going into more detail in subse-quent sections.
3.3.1. Variable heterogeneous characteristics of animals(state variables and behavioral strategies)
3.3.1.1. Individual state variables. Animal state variablesinclude: (1) Biomass, the unit used to describe an animal’senergy content or size. An animal’s Biomass is its initialvalue at birth (InitialBiomass), plus the cumulative amount of
l i n g
18 e c o l o g i c a l m o d e lresources it has assimilated by eating, less the amount lost to“metabolism” and reproduction. An individual must increaseBiomass (by eating plants and/or animals) in order to reproduceand to avoid death by starvation, (2) A Location in a particu-lar habitat, i.e., in a “cell” at a discrete (x, y) position, (3) AnAge which is its initial age at birth (InitialAge) plus the numberof steps it has survived, and (4) StepsSinceReproduction whichdefines the time passed since the most recent reproduction.
3.3.1.2. Individual behavioral strategy. An individual’s behav-ioral strategy determines how that individual responds toeach possible combination of perceptual states the individ-ual’s (species-defined) sensory capabilities can generate, asdescribed further in Section 3.7. The parameters that dictatethe behavioral strategy are not only potentially variable amongindividuals within a species, but are subject to evolution, andtherefore their distribution can change through time (Section3.8).
3.3.2. Fixed homogeneous characteristics of animals(capabilities and constraints)3.3.2.1. General characteristics. Several parameters definegeneral characteristics of each species. For example, parame-ters (defined and discussed below) that describe metabolism(Biomass loss), death due to factors other than those directlymodeled, and some foraging characteristics, are parametersthat are constant and have the same value for all individualsof a given species.
3.3.2.2. Reproduction control. An individual becomes a can-didate for reproduction when it acquires enough Biomass toreproduce. There are a number of parameters that describefixed homogeneous characteristics used in the reproductionprocess.
3.3.2.3. Interaction characteristics. Interaction characteristicsdefine which animals can eat which others, and in part deter-mine how effectively they can do so. In short, interactioncharacteristics define the structure of food webs in DOVE mod-els, as well as specifying (in part) how effectively individuals ofeach species can (a) find and capture prey (animals or plants)and (b) assimilate what they eat.
3.3.2.4. Sensory capabilities. Each species can sense a fixedset of environmental factors (external state, e.g., level of con-sumable resources) and internal factors (internal state, e.g.,Biomass). It is essential for an organism to sense changes inone or more of these factors in order to exhibit phenotypicplasticity.
3.3.2.5. Repertoire of basic actions. Species in DOVE aredefined to have a fixed repertoire of simple actions from whichindividuals can select one action to carry out each time step.
3.3.2.6. Factors that lead to death. Animals can die due to oneof the following optional factors:
1. Old age. An animal dies when it reaches a defined max-imum age value, MaximumAge, which was assigned to itwhen it was born.
2 0 5 ( 2 0 0 7 ) 13–28
2. Starvation. If the Biomass of an animal reaches 0, then itdies of starvation. Biomass is lost at each time step (rep-resenting metabolism) by a constant factor, BiomassLoss,independent of behavior.
3. Predation. An animal can die due to predation by anotheranimal (including global predators).
4. Background death. At every step, each animal may undergorandom death, given the BackgroundDeathProbability definedfor its species.
Note that whereas in the current version of DOVE param-eters describing particular species characteristics are definedas fixed characteristics for each species, these characteristicscould be made more complex or subject to evolution (as withforaging strategy, Section 3.7) if required for exploring partic-ular research questions.
3.4. Global predators
Global predators are special types of animals that prey onother (focal) animals. Global predator number is not coupledto the number of other organisms through consumption orpredation. Instead, the population dynamics of global preda-tors is controlled by a stochastic function that is set up by theuser at the start of each model run. This exogenous specifi-cation of predator dynamics makes it possible to examine theeffect of predation on animal behavior and system dynamicswithout the complications added by feedback to the predator’sown dynamics. In addition, this approach approximates manysystems in which predator number is influenced by multiplebiotic and abiotic factors outside of the constructed speciesassemblage (Lawton, 1989; Cohen et al., 1990; Polis, 1991). Notethat global predators also differ from other animals in thattheir range of influence is the entire habitat that they inhabit(hence the term “global”), and they do not consume plants.Global predation is used in the example provided in Section 4.
3.5. Animal actions
At every time step, each animal must select one action totake from a pre-defined repertoire of actions. The repertoire ofthree actions, which include RemainInactive (or “sit”), Eat (afterpossibly moving), and SwitchHabitat, was chosen to allow therepresentation of some important, broad categories of activityfound in nature, each of which can have associated risks (frompredation) and benefits (by enabling an animal to eat). In par-ticular, when an animal performs the RemainInactive action,it remains in its current location (i.e., in the same cell in itscurrent habitat) and does not eat. Because predation efficacycan be a user-defined function of prey activity (Section 3.6.2),this action can represent hiding in a refuge if the chance ofpredation decreases when prey remain inactive. If an animalselects the SwitchHabitat action (when there are multiple habi-tats), it moves to a random location in the other habitat (Fig. 1),and again does not eat during that step. The Eat action is morecomplicated because it involves determining where, what, and
how much an animal will eat. In short, if an animal selects toEat, it first moves to a location in its current habitat (whichcould be the same location it started at), and then it eats whatit can, where eating involves decrementing the Biomass of the
n g
pomd
ditMmal(ltbrippoe
3
I(wTgTiba(pbm
wfipoltudativappaTisE2
e c o l o g i c a l m o d e l l i
rey (resulting in the death of animal prey, but not necessarilyf plant prey) and adding Biomass to the predator (eating) ani-al. The rest of this section describes the Eat action in more
etail.DOVE provides species-level characteristics that determine
ifferent foraging abilities defined by parameters that spec-fy the range a predator can search and capture prey, andhe predators perception of resource quality/quantity. TheoveRadius (rectilinearly defined) parameter determines howuch of the habitat individuals consider when moving. Once
n animal has moved (which may be “moving” to the sameocation it started in), it then consumes all the resourcesplants and animals) it can capture within an EatRadius (recti-inear) range of cells of the location to which it moved. Movingo a cell during the Eat action can be random, or a species cane defined to move to the most profitable cell (in regards toesource acquisition) within its range, with a given probabil-ty set by the parameter FindBestProbability. Note that thesearameters allow for the simplest possible representation ofredator foraging on a spatial grid (moving randomly to eat onne of the nearest neighbor cells), as well as allowing for moreffective foraging strategies.
.6. Species interactions: who eats whom
n DOVE, individuals directly interact through predator-preyincluding animal–animal and animal–plant) encounters, in
hich the predator (animal) consumes animal or plant prey.he animals or plants that a particular animal (includinglobal predators) can eat is listed on the animal’s DietList.hus the collection of DietLists determine all pair-wise species
nteractions in a model food web. By including different com-inations of animals and plants on the DietLists of eachnimal species, food webs of different sizes and structuresi.e., topology) can be defined. Note that the DietList is not aroperty of a particular predator, but rather of the interactionetween predators and prey, as traits of both species deter-ine whether predation occurs between the two.Whereas the DietList defines the general topology of a food
eb, predation rates and the population level interaction coef-cients (i.e., the per capita effects one species has on theopulation growth rate of others) are an emergent propertyf many factors and mechanisms acting at the individual
evel. The magnitude of the interaction is determined by (1)he distribution of behavioral strategies employed by individ-als of the interacting species; (2) fixed characteristics thatetermine predator foraging characteristics (e.g., MoveRadiuss described in Section 3.5); and (3) parameters that are specifico the predator-prey interaction (rather than to either speciesndividually). For example, in nature, the efficiency of con-erting resources to biomass is a function of both the preynd predator traits, as is the probability of prey capture by aredator. A number of parameters fall under this interactionarameter category in addition to DietList (grouped in Table 1),nd are described in more detail in the following subsections.he possibility of examining the influence of such parameters
s of great interest, because they influence efficiency whichtrongly affects food webs dynamics (Gaedke and Straile, 1994;lser et al., 2000; Nielsen and Ulanowicz, 2000; Valandro et al.,003).
2 0 5 ( 2 0 0 7 ) 13–28 19
Currently DOVE implements a linear functional responseas in classical Lotka–Volterra models, in which predators con-sume prey (animals or plants) with no saturation. It would bea simple matter to modify DOVE so that consumption of preyin a given time step is density dependent and influenced theconsumption of other potential prey in that time step. Impor-tantly, however, in the current version of DOVE the benefit ofeating may not increase linearly (i.e., reproduction potential)with an increase in resource consumption, as a time constraintmay be placed on when resources can be used to reproduce(Section 3.8).
3.6.1. HerbivoryAn animal species that has plant species on its DietList rep-resents an herbivore or omnivore (if it also eats animals). Asmentioned in Section 3.2, all the plants from a given plantspecies at a given x, y location in a habitat are representedby one plant individual in the discrete cell for that loca-tion. In nature, a given percentage of a plant’s resource isoften unavailable to herbivory due to constraints. For example,snails may be limited in how close they can scrape a resourceto the substrate surface. In DOVE a refuge is represented byincluding a Refuge value that is defined as a fraction of theplant species’ carrying capacity not attainable by the animal.An EatFraction factor specifies the fraction of the available plantBiomass animals of that species will eat. In summary, for agiven animal eating a specific plant from a given cell, the ani-mal eats all plants within its EatRadius. The amount eaten ona given cell is equal to the product of the EatFraction and theplant biomass available to the animal (i.e. the Biomass minusthe Refuge). The AssimilationEfficiency for this animal–plantinteraction then determines the conversion (fraction) of theeaten plant Biomass into animal Biomass. When an animal eatsa plant, the plant’s Biomass is reduced, but the plant does notdie (unless EatFraction is 1 and the Refuge is 0). Instead, theplant subsequently increases its Biomass as described by thegrowth equations in Section 3.2.
3.6.2. Predation on animalsDuring the Eat action, an animal will attempt to eat other ani-mals that are on its DietList and are in a cell encompassed bythe predator animal’s EatRadius. As with herbivory, parametersthat determine predation between animals arise from traitsof both the predator and prey, and thus we use parametersthat are specific to the predator-prey interaction in additionto parameters that are specific to each individual species. Innature, there are many characteristics of both predator andprey that influence whether a given individual animal willcapture and consume a given prey individual. In the currentversion of DOVE, these factors are combined into a set of Cap-tureProbability values with one value for each possible preyaction (i.e., RemainInactive, Eat, or SwitchHabitat). For example,for predator A and prey B, the CaptureProbability values mightbe (0.05, 0.5, 0.1), so that if predator A is trying to eat prey B,the probability of capture is 0.05, 0.5 and 0.1, if prey B is inac-tive, eating, or is switching habitats, respectively. (Note that
the action of B is whatever action it last performed). Thus,a DOVE model can be set up such that capture is more likelywhen the prey is active (e.g., switching habitats or eating) thanwhen it is inactive, as is the case with many animals (Werner
l i n g
20 e c o l o g i c a l m o d e land Anholt, 1993; Lima, 1998). If a predator does capture andeat a prey animal, the prey Biomass is converted to predatorBiomass, as discounted by the AssimilationEfficiency, and theprey is removed.
3.6.3. Predation by global predatorsGlobal predator–animal interactions operate as describedabove for other predator–animal interactions, in that thechance that an individual prey will be eaten depends on theset of prey-action-dependent CaptureProbability values of theglobal predator and the prey’s last action. Global predation dif-fers from other predation in that a global predator range is theentire habitat (and therefore not confined to an EatRadius).
3.7. Behavioral strategies — the basis of phenotypicplasticity in DOVE
Animals in DOVE can exhibit different phenotypes as a func-tion of the state of the environment or of its own internal state.This is essential for the representation of phenotypic plastic-ity. In the current version of DOVE, plasticity is limited to thebehavioral strategies the animals use to select basic actionsduring each time step. In particular, each animal has a behav-ioral strategy that defines a map from the animal’s perceptionof the environment, denoted the “perceived environmentalstate,” to a probability distribution over the basic actions avail-able, denoted the “action probability distribution,” from whicha particular action is selected to be carried out (Table 2). Theanimal’s perceived environmental state defines an environ-ment in a broad sense and includes both the animal’s internalstate in addition to the external conditions.
Animal species can perceive any combination of fourenvironmental variables including: (1) Habitat–indicating thehabitat the animal is in; (2) Food level–available resources itcan consume; (3) Predation risk – total risk from all preda-tors (including both global predators and specific predators,if any); and (4) its Biomass. The perceived state of each envi-ronmental variable is mapped into a discrete value, and theseare combined to define the perceived environmental state. Forexample, animals from a given species could be defined suchthat they can distinguish (1) two habitat values for each of twohabitats; (2) four levels of increasing perceived predation risk;(3) two levels, representing low and high, of perceived Biomassstates; and (4) one perceived food level (i.e. they cannot per-ceive any differences in food level). The concatenation of theperceived state values is then combined to form the perceived
environmental state which (in part) determines the action theanimal will select. The number of possible perceived environ-mental states is the product of the number of states perceivedfor each dimension; e.g., there are 2 × 4 × 2 × 1 = 16 possibleTable 2 – Example of a behavioral strategy for a single individu
Perceived environmental state
Habitat Predation risk level Food level Biom
0 0 0 00 1 0 01 0 0 01 1 0 0
2 0 5 ( 2 0 0 7 ) 13–28
perceived environmental states in the above example. Notethat translation from detected changes in the environment towhat is perceived is often represented as a two (or greater) stepprocess in conceptual or simulation models (Dusenbery, 1992;Holland, 1995), with an intermediate state that distinguisheswhat is sensed by an organism from how it perceives it. Thisis indeed the process that takes place in DOVE, where firstan animal detects a value in the environmental state (e.g., 10predators), and then this value is translated into a perceptionlevel category (e.g., level 3, or “high”).
Behavioral strategies are represented as simple tablesthat map from each possible discrete perceived environmen-tal state to a list of parameters that describe the probablyof performing each possible action (RemainInactive, Eat, andSwitchHabitat as described in Section 3.5). That is, each rowdefines an action probability distribution over possible actionsfor one perceived environmental state, and the table has rowsfor all possible perceived environmental states. Table 2 showsone such mapping defining a particular behavioral strategy.The left-hand side of each row contains values that specifya possible perceived environmental state of an animal of agiven species. The right hand side specifies an action probabil-ity distribution associated with each perceived environmentalstate. This example animal exists in a world with two habitats(0,1) which it can detect. Animals of this species can detecttwo predation risk levels (0, low and 1, high), but it cannotdifferentiate food levels or its own biomass, so there is onlyone food level and Biomass value (0). This animal will there-fore be able to detect four different perceptual states andthe action in each state is dictated by the action probabilitydistribution for that state. For example, if the predation riskis low and the animal is in habitat 1, the probabilities thatit will chose the actions RemainInactive, Eat or SwitchHabitatwill be 0.7, 0.2, and 0.1 respectively. (The probability valuesin each row must add to 1 since these define the probabil-ity distribution over all possible actions.) In this example, theanimal’s behavioral strategy results in an animal that has ahigher propensity to eat in Habitat 0, and responds to highpredator presence by becoming less active. The SwitchHabitatgenes create a preference for Habitat 0 in predator absenceand Habitat 1 in predator presence. Note that conspecificshave the same set of possible perceived environmental states,but may have different values for the action probabilitydistribution.
Given this representation, a species exhibits phenotypicplasticity to the extent there are different probability distri-
butions for different perceived environmental states (i.e., indifferent rows). For example, a species using the behavioralstrategy defined in Table 2 exhibits phenotypic plasticity withrespect to habitat and predation level, but not food levels.al animal
Action probability distributions
ass Remain-Inactive Eat Switch-Habitat
0.2 0.8 00.7 0.2 0.10.7 0.2 0.10.9 0.1 0

n g
3r
AaaoW(bH1Woiieq
afTplwbb(
bldhr
Fu(pSss((a
e c o l o g i c a l m o d e l l i
.8. Evolution of strategies through selectiveeproduction with variation
key element of DOVE is that animal phenotype can evolve,nd adaptive behavior is generated using a type of “geneticlgorithm,” an abstract model of Darwinian evolution basedn variation and selection of heritable traits (Holland, 1992).hile routinely used in engineering and computer science
Goldberg, 1989; Mitchell, 1996), such approaches have alsoeen utilized in ecological models (cf. Hraber and Milne, 1997;artvigsen and Levin, 1997; Johst et al., 1999; Lenski et al.,999; Drossel et al., 2001; Lassig et al., 2001; Strand et al., 2002;ilke and Adami, 2002). In the current version of DOVE, the
nly phenotype of animals that is subject to selection is thendividuals’ behavioral strategy (i.e., the parameters describ-ng action probabilities), but it would be a simple matter toxtend selection to other parameters if it is required for a givenuestion.
The genetic algorithm operates in DOVE as follows. Whenn animal’s Biomass exceeds the ReproductionThreshold (definedor its species), reproduction for that individual is possible.he rate real animals can acquire resources is limited due torocessing constraints or handling times. Dove represents this
imitation on the benefits associated with resource acquisitionith a parameter, MinStepsForReproduction, which sets a loweround on the number of time steps required to reproduce sinceirth or since the previous reproductive event for the animal
i.e., the state variable StepsSinceReproduction).When two (or more) animals of the same species are eligi-
le to reproduce at the same time (no matter where they are
ocated), they are paired off randomly to “mate.” Each pair pro-uces one offspring of the same species that is placed in theabitat of one of the parents chosen randomly. The offspringeceives the parameters that describe the fixed homogeneousig. 2 – Adaptation in DOVE. Parameters that dictate behavior, desing a genetic algorithm. Each individual animal has a list of ac
denoted “genes”) that determine which of its potential actions ierceived environmental state (Table 1). In the example represenwitchHabitat, depending on which habitat it occupies, and the pame population are shown, both passing a segment (determinemall probability of a gene mutation during reproduction, as illuand then was renormalized with the value of genes 4 and 5). Ovoffspring with high fitness will pass on their genes) in a mannebstract models of Darwinian evolution. In this manner, the pop
2 0 5 ( 2 0 0 7 ) 13–28 21
characteristics of the parents (which are necessarily the same),and receives a subset of the parameters that determine anindividual’s foraging strategy (behavior) from each parent asdescribed in Fig. 2. These variable parameters, which deter-mine the probability of performing an action as a functionof each possible perceived environmental state as describedin Table 2, are therefore subject to selection, and denoted“genes”. In short, the offspring’s action probability distribu-tions can be thought of as a “genome” that is created byrecombining the two parents’ genomes with a single pointcrossover (Goldberg, 1989). The probability of a crossover eventis determined by the parameter CrossoverProbability. There isalso a probability for each gene to “mutate”, i.e., to changethe probability value for a given (state,action) gene, as deter-mined by the species-level parameters MutationProbability andMutationVariance. After a mutation or crossover, the genes thatdefine the action probability distribution for a perceived envi-ronmental state may no longer sum to one, in which case thegenes for that state are renormalized by dividing each valueby the new sum of gene values for that state. The value of thegene parameters are constant for a particular individual, butthe distribution of values may change for a population dueto selection. Note that while our genetic algorithm and asso-ciated representation of a “genome” is very loosely based onbiological processes, we do not suggest that the parametersrepresent natural genes.
When a model run is initiated by seeding the world withanimals with randomly chosen genes, the low fitness of theseanimals often leads to rapid extinction before more fit off-spring are created by evolution. To avoid this problem, DOVE
models can include a species-level AntiExtinctionPeriod at thebeginning of model runs, to increase the probability that viablestrategies will evolve for that species. During the AntiExtinc-tionPeriod, whenever the abundance of that species falls belownoted genes, are passed to offspring from two parentstion probability distributions stored as a set of parameterst will perform at each time step as a function of theted here, an individual will RemainInactive (“sit”), Eat, orredation risk level. The genes of two individuals from thed by a crossover point) of genes to the offspring. There is astrated; The 6th gene from the left mutated from 0 to 0.2er time gene distributions change due to selectionr similar to that used in genetic algorithms, which areulation adapts in a dynamic environment.

l i n g
22 e c o l o g i c a l m o d e la defined AntiExtinctionAbundance threshold, a copy of eachexisting animal of that species is created and placed randomlyin the world, in effect re-seeding the model with enough ani-mals of that species to allow evolution to continue searchingfor a viable population.
3.9. The basic DOVE activity schedule
DOVE is a discrete time simulation in which various activitiesare carried out each discrete (integer) time step. In short, dur-ing each step the following sequence of activities is carriedout:
1. Reproduction. For each species with more than two individ-uals able to reproduce, carry out reproduction as describedin Section 3.8.
2. Anti extinction (as in Section 3.8).3. Plant growth and animal action. Shuffle a (single) list of
all plants and animals of all species, and carry out ani-mal growth and animal actions in the list order. Each plantgrows as described in Section 3.2. Each animal performsone action (RemainInactive, Eat, or SwitchHabitat) dictated(stochastically) by its behavioral strategy (genes) and theenvironmental (and perhaps internal) state it perceives.Note that this may cause the death of other animals thathave not performed their action in the current time step,in which case those are marked for removal and don’t actfurther in this step.
4. Global predator action. For each global predator present,allow it to have a chance at eating animals that are itsprey. Again, animals that are eaten by global predators areimmediately marked for removal.
5. Global predator number update. Re-compute the numberof global predators according to the user-defined stochasticfunction.
6. Remove dead. Remove animals that die of starvation(Biomass falls below zero), old age (age in current time stepreaches MaximumAge), background death and predation.
7. Update report files. Write summary statistics (species den-sities, resource levels, etc.) at of the end of the current timestep.
3.10. Experiment control and analysis with DOVE
DOVE models also provide a number of features for runningexperiments, observing model behavior and producing outputfor later analysis. These features include:
1. Specification of the parameters defining the particularhabitat, plant, and animal species and their initial char-acteristics and distributions, by way of input files orrun-command parameters.
2. An interactive-run mode, in which the user can observethe plants and animals and their behaviors in “real time.”DOVE provides a Graphical User Interface (GUI) with a con-trol panel to run, pause or stop the model, as well as ways
to change parameter values, load plants and animals fromfiles, save plants and animals to files, and so on. The GUIalso displays the locations of plants and animals in theirhabitats in the Virtual Ecosystem, resource levels, as well as2 0 5 ( 2 0 0 7 ) 13–28
various real time graphs of aggregate statistics for speciesdensities and behavioral choices, causes of death, and soon.
3. A “batch-run” mode, with all parameters including thenumber of steps to run specified through input parame-ter files or run-command parameters, so that the model isthen run without user intervention or real-time observa-tion. Instead, all aggregate measures are written to reportfiles for later analysis. (Note that report files are producedin GUI mode, as well.) Multiple batch model runs canbe set up using an experiment control tool like Drone(See http://cscs.umich.edu/Drone/doc/drone.html) to runthe model multiple times with the same parameters, onlychanging the random number generator seed, and then“sweeping” some parameters while keeping the rest con-stant, to collect sets of run histories for each combinationof parameter values.
4. The ability to start the model with animal populations withrandom traits and distributions, or to load pre-defined pop-ulations from files, and the ability to save populations atvarious times during runs. When initial random popula-tions are created, user-supplied species-level parametersdetermine the distribution of individual state values, andbehavioral strategies are uniformly distributed in the spaceof possible strategies. When pre-defined populations ofindividuals are loaded into the model, state variables andbehavioral strategies are assigned as the individuals arecreated.
5. The option to “turn off evolution”. Whereas the opti-mization of behavior using a genetic algorithm is a keycomponent of DOVE, it is important to be able to per-form simulations without this feature. This is becausewe may be interested in creating species under particu-lar environmental scenarios, and then combining them indifferent combinations to examine food web dynamics inthe absence of evolution. DOVE models therefore can “turnevolution off”. In this case, when two reproductively-ableadults mate, the offspring is produced by importing indi-viduals from a pre-defined population file. In addition, bothparents are also replaced by two individuals from the pre-defined population in order to avoid selection for particulargenotypes from the population. This feature is designedto keep the population’s trait distribution fixed, when, forexample, one wants to examine systems with interactingspecies without the processes introduced by the concurrentevolution of that species.
Note that these last two features of DOVE can be used tofirst evolve a population under particular environmental con-ditions, save the population to files, and then later reload thatpopulation along with others saved from different runs, tostudy how that evolved population fares when combined with(i.e., competes against) animal species evolved under differentconditions.
4. A simple example
In this section we present an example in which we useDOVE to examine phenotypic plasticity of a consumer in

n g
aedcdrWaifitdp
4
FwsTBcrt(su1sB(wrSvtsate
aptIps0atLttiw
eda
e c o l o g i c a l m o d e l l i
predator–consumer–resource tri-trophic chain. We furtherxamine how the presence of a second consumer (hereafterenoted the competitor) will affect the behavior of the focalonsumer species, as a function of competitor number for twoifferent foraging strategies of the competitor. In each modelun, the competitor number and foraging behavior were fixed.
e use a global predator species to represent the predatornd we fixed competitor number and behavior, because of ournterest in isolating the optimal phenotypic response of theocal consumer species in the absence of potential feedbacksnvolving predator and competitor number. Note, however,hat the focal consumer is affected by feedbacks from resourceensity, which are in turn affected by the competitor whenresent.
.1. Simulation construction and parameters used
irst consider the model in the absence of the competitor. Theorld is represented by a single 20 × 20 habitat, where a plant
pecies, a consumer species and a global predator interact.he plants grew according to Eq. (1) with K = 15000, and r = 1.1.ecause there was only one habitat, the consumer actionsonsisted of RemainInactive and Eat. We used the simplest rep-esentation of the Eat action, in which the consumer movedo a cell randomly selected from the 9 cells within +1/−1MoveRadius = 1) of its current location, and then it only con-umed resources on the cell it occupied (EatRadius = 0). We alsosed the simplest representation of predation risk: there wasglobal predator that had an alternating presence/absence
equence with a mean of 10 and variation of 1 time steps. TheackgroundDeathProbability of the consumer was equal to 0.01
1% probability of being removed at each time step). Animalsere initiated with a Biomass of 1, and they were added to the
eproduction list if they reached a Biomass of 5001. The Min-tepsForReproduction was 30. The MaximumAge was set to a highalue so that age was not a factor in this experiment. In addi-ion, the BiomassLoss was set to 0, so that there was also notarvation. In short, animals live until they are consumed byglobal predator, or until they die due to random death, and
hey reproduce when they accumulate sufficient resources byating available plant Biomass.
Species interactions involve global predator-consumernd consumer–plant interactions. The global predator, whenresent, captured prey with a CaptureProbability equal to 0.01 ifhe consumer was eating, but 0 if the consumer was inactive.n other words, when the global predator was present, eachotential prey (focal consumer) that chose to Eat on a giventep had a 1% chance of being eaten, whereas the chance was% otherwise. This represents the common tradeoff associ-ted with foraging, i.e., energy is gained by the consumer athe cost of increased predation risk (Werner and Anholt, 1993;ima, 1998). For consumers eating plants, the Eat action led tohe acquisition of 25% of the available resources, which washe amount present minus a refuge equal to 20% of the carry-ng capacity (therefore Refuge = 3000). The AssimilationEfficiencyas set to 1.
Simulations were run for, and thus animal behaviorvolved over, 100,000 time steps. The animals had four genesefining two action probability distributions over the twoctions (RemainInactive and Eat) for each of two perceived envi-
2 0 5 ( 2 0 0 7 ) 13–28 23
ronmental states, i.e. for each of the two predation risk states(global predator absent and present). Each run commencedwith 5000 consumers randomly distributed in the habitat withrandom gene values. The values of MutationProbability andMutationVariance were 0.02 and 0.1, respectively.
We also performed model runs in which a competitorconsumer population was added to the previous configura-tion. The parameters defining the competitor species wereidentical to the focal consumer, except that some of the com-petitor’s parameters were set to ensure that the number andbehavior of the competitors stayed constant throughout theruns. In particular, the competitor population’s genes wereinitialized so as to be homogeneous across all individualsin a given run, and their traits remained fixed through theruns (i.e., evolution was turned off for the competitors). Weexamined the effect of homogeneous competitor populationsthat exhibited one of two extreme types of behavior: (1) “LowRisk Competitors” (LRC), animals that ate 100% of the timein predator absence, but never in predator presence, and (2)“High Risk Competitors” (HRC), animals that ate 100% of thetime in predator presence, but never in their absence. This lat-ter scenario would arise from a consumer species that foragesin synchrony with predator presence spatially or temporallydue to, for example, following the same environmental fac-tors (such as light level) as the predator. To hold competitordensities constant within a given run, we set the MinStepsFor-Reproduction very high so that competitor reproduction did notoccur, and we set the predation rate of the global predator andthe BackgroundDeathProbability to zero so there was no deathfor competitors. Thus the number and behavior of competi-tors remained constant throughout each run. These settingsdo not affect an individual competitor’s consumption rate ofresources (independent of resource density changing). Runswere performed with competitor numbers of 0 (the base case),200, 400, 600, 800, and 1000 individuals.
For the experiments reported below, the model was run 30times (each with a different random number generator seed)for each competitor number and competitor type (LRC or HRC).Thus the initial distribution of focal consumers was differentin detail from run to run, as was the actual sequence of globalpredator appearances, but the mean and variance of thosedistributions were the same.
4.2. Example results
In DOVE models, phenotypic plasticity is reflected in actionprobability distributions that are different for different per-ceived environmental states (Section 3.7). Therefore, in thesimple scenario examined here, phenotypic plasticity wouldbe evidenced if the focal consumers show one rate of eating(and thus of remaining inactive) when global predators arepresent and a different rate when they are absent. Fig. 3 showsthat phenotypic plasticity indeed did evolve. The populationof consumers is created with randomly distributed actionprobability distribution gene values, so initially the averageprobability to Eat or RemainInactive was about 0.5. (Since the
animals have only two action probability genes, Eat or Remain-Inactive, the probability of remaining inactive is simply1 minusthe probability of eating.) Whereas the behavior is not prepro-grammed to be different in predator presence and absence,
24 e c o l o g i c a l m o d e l l i n g 2 0 5 ( 2 0 0 7 ) 13–28
Fig. 3 – Evolution of phenotypic plasticity in a consumerspecies under varying predation risk. The two lines showthe average gene value that dictates the probability ofeating (for all individuals in the population) in predatorpresence and predator absence, as a function of time.Initially the gene values are random, so the average valueis near 0.5. As time progresses, the phenotypically plasticbehavior evolved, resulting in average gene values that lead
Fig. 4 – Competitor influence on focal consumer behavior.The mean Eat action probability (i.e. gene values forprobability of eating) in predator presence and absence areshown as a function of competitor numbers and for twotypes of competitors. Values are mean population genevalues for probability of eating, averaged over 30 runs at theend of 100,000 steps. Squares: Low risk competitors (LRC)which eat only when the predator is absent. Triangles: Highrisk competitors (HRC) that eat only when the predator ispresent. Filled and empty symbols represent values inpredator presence and absence, respectively. At the highestcompetitor number (1000) the focal consumer species went
to the focal consumer eating nearly 100% of the time inpredator absence, but only about 40% in predator presence.
and may evolve to be the same, Fig. 3 shows that very differentbehavior rapidly evolved in predator presence and absence.After about 10,000 steps, in predator absence the consumersate nearly 100% of the time, while in predator presence theyate only 40% of the time. Eating nearly 100% of the time inpredator absence is to be expected given there is no associatedcost of eating in predator absence. Apparently the benefits ofeating in predator presence at an intermediate rate counter-balances the potential of being consumed by the predator,thus resulting in a consumer species exhibiting phenotypicplasticity to maximize its fitness by eating at different ratesin the two perceived environmental states (predator absenceand presence).
The results from runs with different competitor densitiesand different competitor behavioral strategies indicate thatthe focal consumer’s behavioral strategies depended on thesefactors. Fig. 4 shows the population average gene values for theconsumer’s “probability of eating” gene, at the end of 100,000step runs. First consider the results for runs with varying den-sities of the High Risk Competitor (HRC, i.e., the competitorthat eats 100% of the time in predator presence and 0% other-wise). The focal consumer still eats 100% of the time whenthe predator is absent, no matter what the number of theHRC. However, the probability that the consumer eats whenthe predator is present falls approximately linearly, from 0.40to 0.06, as HRC number is increased. Compare these results
to those with varying number of the Low Risk Competitor(LRC, i.e., the competitor that eats 100% of the time when thepredator is absent and 0% otherwise). As with the HRC, thefocal consumer still eats 100% of the time when the preda-extinct with LRC competitors. Standard error of values issmaller than symbol size and therefore not shown.
tor is absent, no matter what the number of the LRC. But incontrast with the results with the HRC, the probability thatthe focal consumer eats when the predator is present risesslightly, from 0.40 to 0.47, as LRC number is increased.
These results indicate that the phenotypically plasticbehavior of the focal consumer that evolved was sensitiveto feedbacks in the system associated with the presence ofa competitor that competes for the resource, even when theconsumer could not detect the second competitor or theresource. The competitor affected the resource level, whichin turn affected the tradeoffs associated with eating (versusremaining inactive) for the focal consumer species. The focalconsumer species evolved to eat less in predator presenceas the number of the competitor that ate in predator pres-ence increased (the HRC), because the benefit of eating wasno longer as large. The effect of the competitor that ate inpredator absence (the LRC) is not as straightforward and isperhaps more interesting. Apparently the competitor eating inpredator absence increased the relative importance of gainingresources in predator presence. This shifted the focal con-sumer’s expected gains and costs associated with eating in
predator presence in such a way that it was beneficial to eatmore often as there was more competition.This example also illustrates how individual-based com-putational models like DOVE can be used to explore the

e c o l o g i c a l m o d e l l i n g
Fig. 5 – Competitor influence on focal consumer’sabundance. Mean number of the focal consumer speciesindividuals at the end of 100,000 step runs is shown as afunction of the competitor number for both types ofcompetitors; High Risk Competitors (HRC) that eat only inthe presence of predators (filled squares), and Low RiskCompetitors (LRC) that eat only in the absence of thepredator (empty squares). At the highest competitornumber (1000) the focal consumer species went extinctwith LRC competitors. Standard error is smaller thans
pfiFawrrtottsasrrqciam
5
Ite
ymbol size, and therefore not shown.
ossible effects of adaptive responses of prey in scenarios dif-cult, or impossible, to study with other modeling approaches.or example, Fig. 5 shows that the competitor had a neg-tive effect on consumer number, and this negative effectas stronger with competitors that ate in predator absence
ather than in predator presence. How did the phenotypicesponse of the consumer affect this pattern? How wouldhe phenotypic response affect the resource, or potentiallyther consumers competing for the resource? How wouldhe phenotypic response affect the stability of the popula-ion dynamics of the consumer, and other potential competingpecies? DOVE is a flexible computation system that wouldllow for the investigation of such questions. It is also pos-ible to expand this example exploring how the phenotypicesponse affects system dynamics as well as the equilibriumelationships shown in Figs. 3, 4 and 5. We do not pursue suchuestions here, nor delve into the results of the example morelosely, because the primary purpose of this example is tollustrate the basic structure and behavior of DOVE models,nd to show that experiments with even very simple DOVEodels can reveal surprising results.
. Discussion
n this paper we have described the motivation for and archi-ecture and features of DOVE. We also present results of somexperiments with an example model which show that “digital”
2 0 5 ( 2 0 0 7 ) 13–28 25
animal populations in DOVE can evolve phenotypic plasticity,a requirement for the questions DOVE is designed to exam-ine. Additionally, the results illustrate that even in simple foodwebs like those described here, the structure of the food webcan affect the optimal response of individuals in it throughindirect effects. Thus in the example, whereas the focal con-sumer animals could only detect predators and not othercompetitor consumers, the presence of a competitor never-theless affected the evolved phenotypically plastic behaviorof the focal consumer in predator presence. We are unawareof studies that demonstrate such patterns. Studies are likelylacking, in part, because of the difficulty in using conventionalanalytic techniques to examine this problem.
As mentioned in the Introduction, the motivation for thedevelopment of DOVE is that a complementary approach isneeded to address problems that are difficult or impossibleto examine with traditional techniques. We stress that weview DOVE as a complementary approach, as using traditionaltechniques have been and will continue to further our under-standing of the origin and influence of phenotypic plasticity.However, there are several aspects of IBM’s that make themparticularly good complements for analytic approaches: (1)Because IBM’s are inherently mechanistic, they can be usedto enhance our understanding of the general, high-level pro-cesses expressed in analytic models, by showing how thosehigher level processes result from the interplay of specificunderlying causal mechanisms. (2) Because IBMs are dynamic,it is possible to examine the behavior of a system duringthe “transient” period, rather than just examining equilib-rium or other “snapshot” states of the system. Understandingthe dynamics of CAS-like ecosystems is critical for gaininga deeper understanding of how those systems develop tothe snapshots revealed by data collected from the field orpredicted by analytic models. (3) Because IBM’s are computa-tional models, they, like analytic approaches, provide a formal,unambiguous and thus replicable and testable approach tomodeling (Axelrod and Cohen, 2000; Axelrod, 2005), but IBM’scan be used to study aspects of ecosystems/CAS that aredifficult or impossible to study using traditional analytic(equation-based or game-theoretic) techniques (Parunak et al.,1988; Wilson, 1998; Grimm et al., 2005).
Of course there also are shortcomings and difficultiesassociated with using IBMs, including (1) balancing model sim-plicity and realistic details; (2) computational and modelingcosts; and (3) generality of conclusions. Balancing simplicityversus realistic details is a key issue for all model construction(Levins, 1966), as one must decide which details, factors andmechanisms to leave out, and for those that are included, howto make them operational in simple ways that still capture theessential aspects of the entities and processes being modeled(Grimm et al., 2005). Because of the ease in which “features”can be added to IBMs, there is a temptation to add more andmore mechanisms and details that are found in the real world.For analytic models this temptation is somewhat naturallycurbed, since it is often difficult or impossible to solve all butthe simplest of such models.
The computational and programming costs of using IBM’slike DOVE also can be a problem that limits their usefulness.We have found that by distributing computational load acrossmultiple machines, we can run experiments involving thou-

l i n g
26 e c o l o g i c a l m o d e lsands of individuals and generations. As computer hardwareand software increases in speed, increasingly large food websshould be accessible to this approach. However, programmingcosts are often far larger than the cost of running the model,since creating IBM’s involves not just writing the program fora model, but also testing the programs to verify their correct-ness (i.e., lack of “bugs”) and writing programs to analyze anddisplay the results. Some ways to minimize these costs includemaking the IBM as simple as possible, given the questions tobe studied, and using established software engineering andmodel testing techniques (Grimm and Railsback, 2005).
The difficulty of establishing the generality of findings is animportant difficulty with any IBM (Grimm, 1999; Grimm andRailsback, 2005; Grimm et al., 2005). For instance, in the exam-ple problem described in Section 4 we found that the presenceof competitors affected the optimal foraging rate in preda-tor presence. But how robust are these findings to changesin other parameters or system features, such as the form andparameters that describe resource growth rate? Whereas onecan perform a series of simulations to explore the generalityof the finding, it is clearly more difficult to discern the gener-ality of a finding with IBM than with other approaches such asanalytical models. One standard approach is to carry out sen-sitivity analysis of model parameter effects on IBM outcomes(Grimm and Railsback, 2005). For instance, we used sensitivityanalysis to examine the influence of different parameters inan application of DOVE that examined how phenotypic plas-ticity affects invasion biology (Peacor et al., 2006).
However, there are two ways in which the generalityascribed to analytic models is less than appears at first sight.First, as mentioned in the Introduction, analytic models ofphenotypic plasticity depend on the choice of the functionalforms that represent indirect interactions, and on assump-tions about the strength of interactions, the role of spatialheterogeneity, and so on. Second, when modeling complexadaptive systems, there is a kind of “irony of robustness” thatshould be considered (Page, 2007). That is, analytic models arepraised as being general (robust), but they achieve that gen-erality by ignoring exactly the details that individual basedmodels are designed to capture. We believe that those detailsare likely to be important in many complex adaptive systems.On the other hand, individual based models are criticized asnot being robust (general) because details in the models canaffect the outcomes, but understanding how details matter isa key reason for using IBMs.
We believe that the shortcomings of IBMs are offset intwo ways. The first is that using this approach may revealunforeseen processes that “emerge” across levels of organi-zation. By basing a system’s behavior on simple rules at theindividual level, processes at the population and communitylevel necessarily arise from the rules imposed at the indi-vidual level (Holland, 1995; Levin, 1998; Grimm et al., 2005).For example, the functional response parameters and interac-tion coefficients in analytic models are not explicitly definedin IBM’s like Dove. Rather, many individual properties anddynamical processes contribute to aggregate properties such
as the species-level interaction coefficients. Such propertiesare notoriously difficult to predict and even understand. Thereis an opportunity for complementary use of both IBM andanalytic approaches, e.g., an IBM may reveal such emergent2 0 5 ( 2 0 0 7 ) 13–28
processes and factors that can then be more deeply exploredusing more conventional analytic approaches. The second waythat an IBM approach compensates for the problems men-tioned above is that the bottom-up IBM approach providesways to study the interaction of important environmentalfactors that simply may not be accessible with conventionalapproaches. That is, some processes may only emerge in arepresentation of nature that allows simultaneous inclusion offactors such as the feedbacks between the individual and com-munity scales, individual variation in phenotype that allowsthe possibility of rare individuals to have large effects on sys-tem attributes, and stochastic abiotic influences.
Finally, we believe that it is important to view individualbased models like DOVE and analytic, equation-based mod-els as complementary approaches to understanding complexdynamic systems like food webs. On the one hand, IBM’scan include factors that allow us to address problems thatare difficult or impossible to examine with traditional tech-niques, allowing us to systematically relax the assumptionsand constraints necessary for analytic models in order to bet-ter understand the full dynamics of the systems. On the otherhand, analytic models can represent fundamental processesthat are truly general, in simple forms with provable implica-tions. And both methods can be used together to help verifythe correctness of each other. That is, by defining a simple IBMand setting parameters such that they match the assumptionsof a corresponding analytic model, we can “dock” (Axetell etal., 1996; Brown et al., 2004) the analytic and individual basedmodel, providing support for each being correct to the extenttheir behaviors match each other and valid to the extent itmatches observations from the real world. We believe this kindof model-to-model comparison is important not only to ver-ify the models (which we have done for simple cases), but toserve as a foundation when using computational systems likeDOVE to study more complex problems that go beyond whatcan be treated with analytic approaches.
In this paper we have described DOVE and shown how evena simple DOVE model can generate interesting behavior thatprovides insight into novel processes in food webs in whichphenotypic plasticity can evolve. Our long term goal is to useDOVE to explore how phenotypic plasticity affects commu-nity level properties in models in which more individuals canuse more flexible strategies in the context of more complexfood webs. By allowing phenotypic responses to evolve, weensure that the predator-prey functional responses arise fromadaptive behavior. As a first step we have explored relativelysimple food webs with only several species. Initial studiesof a “diamond food web” with a predator, two consumers,and a resource, are encouraging; two unforeseen mecha-nisms emerged that strongly affected the invasion probabilityand coexistence of the competing consumers (Peacor et al.,2005). In one case, the manner in which phenotypic plastic-ity affects the fitness surface influences invasion rates (Peacoret al., 2006). In the second, phenotypic plasticity stabilizedconsumer dynamics by intensifying intraspecific relative tointerspecific competition.
After examining systems with 3–4 species, we will exam-ine systems with more species, with different combinations ofinteraction strengths (McCann et al., 1998) and assembly rulesincluding different evolutionary histories (Hraber and Milne,

n g
1wotvmttui
A
WaHdpacfUwSc
r
A
A
A
A
A
A
A
A
A
A
AB
e c o l o g i c a l m o d e l l i
997). In parallel to increasing dimensionality (complexity),e plan to also explore richer more flexible representationsf behavioral strategies. For example, we will use equationso describe behavioral responses, in which the parametersalues are evolved by a genetic algorithm, rather than theatrix representation used in the present version. Using DOVE
o explore mechanisms, factors and food web structures likehose mentioned above will lead to both broader and deepernderstanding of the important effects of phenotypic plastic-
ty on food web evolution and dynamics.
cknowledgements
e thank Tony Dell for helpful comments on this paper,nd Katrina Button, Fernando Diaz, Erik Goodman, Johnolland, Mercedes Pascual and Earl Werner for discussionsuring project development. Thanks to CSCS for com-utation resources and support for RLR. SDP wishes tocknowledge support for this research from the Michigan Agri-ultural Experimental Station and the Cooperative Instituteor Limnology and Ecosystems Research, and Michigan Stateniversity’s Intramural Research Grants Program. This workas supported by NSF grants DEB-0089809 to Earl Werner andDP. This is Great Lakes Environmental Research Laboratoryontribution number 1423.
e f e r e n c e s
brams, P.A., 1984. Foraging time optimization interactions infood webs. Am. Nat. 124, 80–96.
brams, P.A., 1987. Indirect interactions between species thatshare a predator: varieties of indirect effects. In: Kerfoot, W.C.,Sih, A. (Eds.), Predation: Direct and Indirect Impacts onAquatic Communities. University Press of New England,Hanover, pp. 38–54.
brams, P.A., 1990. The effects of adaptive behavior on the type-2functional response. Ecology 71, 877–885.
brams, P.A., 1992. Adaptive foraging by predators as a cause ofpredator prey cycles. Evol. Ecol. 6, 56–72.
brams, P.A., 1995. Implications of dynamically variable traits foridentifying, classifying and measuring direct and indirecteffects in ecological communities. Am. Nat. 146, 112–134.
brams, P.A., 2001. Describing and quantifying interspecificinteractions: a commentary on recent approaches. Oikos 94,209–218.
brams, P.A., Menge, B.A., Mittelbach, G.G., Spiller, D., Yodzis, P.,1996. The role of indirect effects in food webs. In: Polis, G.,Winemiller, K. (Eds.), Food Webs: Dynamics and Structure.Chapman and Hall, New York, NY, pp. 371–395.
grawal, A.A., 2001. Phenotypic plasticity in the interactions andevolution of species. Science 294, 321–326.
xetell, R., Axelrod, R., Epstein, J.M., Cohen, M., 1996. Aligningsimulation models: a case study and results. Comput. Math.Organizational Theory 12, 124–141.
xelrod, R., Idea Group, 2005. Advancing the art of simulation inthe social sciences. In: Jean-Phillipe Rennard (Ed.), Handbook
of Research on Nature Inspired Computing for Economy andManagement. Hersey PA.xelrod, R., Cohen, M., 2000. Harnessing Complexity. Free Press.eckerman, A.P., 2005. The shape of things eaten: the functional
response of herbivores foraging adaptively. Oikos 110, 591–601.
2 0 5 ( 2 0 0 7 ) 13–28 27
Bolker, B., Holyoak, M., Krivan, V., Rowe, L., Schmitz, O., 2003.Connecting theoretical and empirical studies oftrait-mediated interactions. Ecology 84, 1101–1114.
Brown, D.G., Page, S.E., Riolo, R.L., Rand, W., 2004. Agent based andanalytic modeling to evaluate the effectiveness of greenbelts.Environmental Modeling and Software 19, 1097–1109.
Caraco, T., Martindale, S., Pulliam, H.R., 1980. Avian flocking inthe presence of a predator. Nature 285, 400–401.
Cohen, J.E., Luczak, T., Newman, C.M., Zhou, Z.M., 1990.Stochastic structure and nonlinear dynamics of food webs –qualitative stability in a Lotka Volterra cascade model. Proc. R.Soc. Lond. B 240, 607–627.
de Ruiter, P.C., Wolters, V., Moore, J.C. (Eds.), 2005. Dynamic FoodWebs: Multispecies Assemblages, Ecosystem Development,and Environmental Change. Elsevier, Amsterdam.
Dusenbery, D.B., 1992. Sensory Ecology, How Organisms Acquireand Respond to Information: Stimulus Transmission. W.H.Freeman & Co., New York.
Drossel, B., Higgs, P.G., McKane, A.J., 2001. The influence ofpredator-prey population dynamics on the long-termevolution of food web structure. J. Theor. Biol. 208,91–107.
Ebenman, B., Persson, L. (Eds.), 1988. The Dynamics ofSize-Structured Populations. Springer–Verlag, Heidelberg.
Elser, J.J., Fagan, W.F., Denno, R.F., Dobberfuhl, D.R., Folarin, A.,Huberty, A., Interlandi, S., Kilham, S.S., McCauley, E., Schulz,K.L., Siemann, E.H., Sterner, R.W., 2000. Nutritional constraintsin terrestrial and freshwater food webs. Nature 408,578–580.
Fellowes, M.D.E., Travis, M.J., 2000. Linking the coevolutionaryand population dynamics of host-parisitoid interactions.Popul. Ecol. 42, 195–203.
Gaedke, U., Straile, D., 1994. Seasonal changes of trophic transferefficiencies in a plankton food web derived from biomass sizedistributions and network analysis. Ecol. Modell. vol. 75,435–445.
Goldberg, D.E., 1989. Genetic Algorithms in Search. In:Optimization and Machine Learning. Addison-Wesley.
Grimm, V., 1999. Ten years of individual-based modelling inecology: What we have learned and what could we learn inthe future? Ecol. Modell. 115, 129–148.
Grimm, V., Railsback, S.F., 2005. Individual-Based Modeling andEcology. Princeton University Press, Princeton, N.J.
Grimm, V., Revilla, E., Berger, U., Jeltsch, F., Mooij, W.M., Railsback,S.F., Thulke, H.-H., Weiner, J., Wiegand, T., DeAngelis, D.L.,2005. Pattern-oriented modeling of agent-based complexsystems: lessons from ecology. Science 310, 987–991.
Grimm, V., Uchmanski, J., 2002. Individual variability andpopulation regulation: a model of the significance ofwithin-generation density dependence. Oecologia 131,196–202.
Hartvigsen, G., Levin, S., 1997. Evolution and spatial structureinteract to influence plant-herbivore population andcommunity dynamics. Proc. R. Soc. Lond. B 264, 1677–1685.
Holland, J.H., 1992. Adaptation in Natural and Artificial Systems,second Edition. MIT Press.
Holland, J.H., 1995. Hidden Order: How adaptation buildscomplexity. MIT Press.
Holker, F., Mehner, T., 2005. Simulation of trait- anddensity-mediated indirect effects induced by piscivorouspredators. Basic Appl. Ecol. 6, 289–300.
Hraber, P.T., Milne, B.T., 1997. Community assembly in a modelecosystem. Ecol. Modell. 103, 267–285.
Huston, M., DeAngelis, D., Post, D.W., 1988. New computer
models unify ecological theory. BioScience 38, 682–691.Ives, A.R., Dobson, A.P., 1987. Antipredator behavior and thepopulation-dynamics of simple predator-prey systems. Am.Nat. 130, 431–447.

l i n g
28 e c o l o g i c a l m o d e lJohst, K., Doebeli, M., Brandle, R., 1999. Evolution of complexdynamics in spatially structured populations. Proc. R. Soc.Lond. B 266, 1146–1154.
Krivan, V., 2003. Competitive coexistence caused by adaptivepredators. Evol. Ecol. Res. 5, 1163–1182.
Krivan, V., Schmitz, O.J., 2003. Adaptive foraging and flexible foodweb topology. Evol. Ecol. Res. 5, 623–652.
Krivan, V., Schmitz, O.J., 2004. Trait and density mediated indirectinteractions in simple food webs. Oikos 107, 239–250.
Lassig, M., Bastolla, U., Manrubia, S.C., Valleriani, A., 2001. Shapeof ecological networks. Phys. Rev. Lett. 86, 4418–4421.
Lawton, J.H., 1989. Food webs. In: Cherrett, J.M. (Ed.), EcologicalConcepts: the Contribution of Ecology to an Understanding ofthe Natural World. Oxford, Scientific Publications.
Lenski, R.E., Ofria, C., Collier, T.C., Adami, C., 1999. Genomecomplexity robustness, and genetic interactions in digitalorganisms. Nature 400, 661–664.
Levin, S.A., 1998. Ecosystems and the biosphere as complexadaptive systems. Ecosystems 1, 431–436.
Levins, R., 1966. The Strategy of Model Building in PopulationBiology. Am. Scientist 54, 421–431.
Lima, S.L., 1998. Stress and decision making under the risk ofpredation: recent developments from behavioral,reproductive, and ecological perspectives. Adv. Stud. Behav.27, 215–290.
Lima, S.L., Zollner, P.A., Bednekoff, P.A., 1999. Predation, scramblecompetition, and the group size effect in anti-predatorvigilance. Behav. Ecol. Sociobiol. 46, 110–116.
Lomnicki, A., 1988. Population Ecology of Individuals. PrincetonUniversity Press, Princeton, NJ.
Luttbeg, B., Schmitz, O.J., 2000. Predator and prey models withflexible individual behavior and imperfect information. Am.Nat. 155, 669–683.
McCann, K., Hastings, A., Huxel, G.R., 1998. Weak trophicinteractions and the balance of nature. Nature 395, 794–797.
Miller, T.E., Kerfoot, W.C., 1987. Redefining indirect effects. In:Kerfoot, W.C., Sih, A. (Eds.), Predation: Direct and IndirectImpacts on Aquatic Communities. University Press of NewEngland, Hanover, pp. 33–37.
Miner, B.G., Sultan, S.E., Morgan, S.G., Padilla, D.K., Relyea, R.A.,2005. Ecological consequences of phenotypic plasticity. TrendsEcol. Evol. 20, 685–692.
Mitchell, M., 1996. An Introductin to Genetic Algorithms. The MITpress.
Nielsen, S.N., Ulanowicz, R.E., 2000. On the consistency betweenthermodynamical and network approaches to ecosystems.Ecol. Modell. 132, 23–31.
Page, S.E., 2007. Agent Based Models. Palgrave Dictionary ofEconomics, in press.
Peacor, S.D., Allesina, S., Riolo, R.L., Pascual, M., 2006. Phenotypicplasticity opposes species invasions by altering fitnesssurface. PLoS Biol. 4, e372.
Peacor, S.D., Riolo, R.L., Pascual, M., 2005. Phenotypic plasticityand species coexistence: modeling food webs as complexadaptive systems. In: Pascual, M., Dunne, J.A. (Eds.), Food
Webs as Complex Adaptive Networks: Linking Structure toDynamics. Oxford University Press, pp. 245–270.Peacor, S.D., Werner, E.E., 1997. Trait-mediated indirectinteractions in a simple aquatic food web. Ecology 78,1146–1156.
2 0 5 ( 2 0 0 7 ) 13–28
Peacor, S.D., Werner, E.E., 2001. The contribution oftrait-mediated indirect effects to the net effects of a predator.In: Proceedings of the National Academy of Sciences of theUnited States of America 98, pp. 3904–3908.
Peacor, S.D., Werner, E.E., 2004. How dependent are species-pairinteraction strengths on other species in the food web?Ecology 85, 2754–2763.
Peckarsky, B.L., McIntosh, A.R., 1998. Fitness and communityconsequences of avoiding multiple predators. Oecologia 113,565–576.
Polis, G.A., 1991. Complex trophic interactions in deserts - anempirical critique of food-web theory. Am. Nat 138, 123–155.
Parunak, H.V.D., Savit, R., Riolo, R.L., 1988. Agent-based modelingvs equation-based modeling: a case study and users’ guide.In: Proceedings of Multi-agent systems and Agent-basedSimulation (MABS’98). Springer, pp. 10–25.
Railsback, S.F., 2001. Concepts from complex adaptive systems asa framework for individual-based modelling. Ecol. Modell.139, 47–62.
Schmitz, O.J., Krivan, V., Ovadia, O., 2004. Trophic cascades: theprimacy of trait-mediated indirect interactions. Ecol. Lett. 7,153–163.
Strand, E., Huse, G., Giske, J., 2002. Artificial evolution of lifehistory and behavior. Am. Nat. 159, 624–644.
Tollrain, R., Harvell, C.D., 1999. The Ecology and Evolution ofInducible Defenses. Princeton University Press, Princeton, N.J.
Turner, A.M., Mittelbach, G.G., 1990. Predator avoidance andcommunity structure – interactions among piscivores,planktivores, and plankton. Ecology 71, 2241–2254.
Trussell, G.C., Ewanchuk, P.J., Bertness, M.D., 2002. Field evidenceof trait-mediated indirect effects in a rocky intertidal foodweb. Ecol. Lett. 5, 241–245.
Uriarte, M., Reeve, H.K., 2003. Matchmaking and speciesmarriage: a game-theory model of community assembly.Proceedings of the National Academy of Sciences of theUnited States of America 100, 1787–1792.
Valandro, L., Caimmi, R., Colombo, L., 2003. What is hiddenbehind the concept of ecosystem efficiency in energytransformation? Ecol. Modell. 170, 185–191.
Vos, M., Kooi, B.W., DeAngelis, D.L., Mooij, W.M., 2004. Inducibledefenses and the paradox of enrichment. Oikos 105,471–480.
Werner, E.E., Anholt, B.R., 1993. Ecological consequences of thetradeoff between growth and mortality rates mediated byforaging activity. Am. Nat. 142, 242–272.
Werner, E.E., Peacor, S.D., 2003. A review of trait-mediatedindirect interactions in ecological communities. Ecology 84,1083–1100.
West-Eberhard, M.J., 2003. Developmental Plasticity andEvolution. Oxford University Press.
Wilke, C.O., Adami, C., 2002. The biology of digital organisms.Trends ecol. evol. 177, 528–532.
Wilson, W.G., 1998. Resolving differences between deterministic
population models and individual-based simulations. Am.Nat. 151, 116–134.Wootton, J.T., 1993. Indirect effects and habitat use in anintertidal community: interaction chains and interactionmodifications. Am. Nat. 141, 71–89.









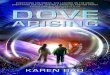








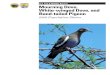







![[Dove] Digital Marketing - Project: Dove Hair Lab](https://img.pdfslide.us/doc/110x75/55a5ab7a1a28aba5238b458e/dove-digital-marketing-project-dove-hair-lab.jpg)


