Embed Size (px)
Citation preview

ARTICLE IN PRESS
0021-9290/$ - se
doi:10.1016/j.jb
�Correspondturing Enginee
Engineering Bu
Tel.: +613 834
E-mail addr
pandym@unim
Journal of Biomechanics 40 (2007) 356–366
www.elsevier.com/locate/jbiomech
www.JBiomech.com
A neuromusculoskeletal tracking method for estimating individualmuscle forces in human movement
Ajay Setha, Marcus G. Pandya,b,�
aDepartment of Biomedical Engineering, University of Texas at Austin, USAbDepartment of Mechanical and Manufacturing Engineering, University of Melbourne, Victoria, Australia
Accepted 29 December 2005
Abstract
A neuromusculoskeletal tracking (NMT) method was developed to estimate muscle forces from observed motion data. The NMT
method combines skeletal motion tracking and optimal neuromuscular tracking to produce forward simulations of human
movement quickly and accurately. The skeletal motion tracker calculates the joint torques needed to actuate a skeletal model and
track observed segment angles and ground forces in a forward simulation of the motor task. The optimal neuromuscular tracker
resolves the muscle redundancy problem dynamically and finds the muscle excitations (and muscle forces) needed to produce the
joint torques calculated by the skeletal motion tracker. To evaluate the accuracy of the NMT method, kinematics and ground forces
obtained from an optimal control (parameter optimization) solution for maximum-height jumping were contaminated with both
random and systematic noise. These data served as input observations to the NMT method as well as an inverse dynamics analysis.
The NMT solution was compared to the input observations, the original optimal solution, and a simulation driven by the inverse
dynamics torques. The results show that, in contrast to inverse dynamics, the NMT method is able to produce an accurate forward
simulation consistent with the optimal control solution. The NMT method also requires 3 orders-of-magnitude less CPU time than
parameter optimization. The speed and accuracy of the NMT method make it a promising new tool for estimating muscle forces
using experimentally obtained kinematics and ground force data.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: Musculoskeletal modeling; Optimization; Jumping; Computer simulation; Muscle control
1. Introduction
Accurate knowledge of muscle forces is essential forunderstanding muscle function and for determiningskeletal loading during human movement. Directrecording of muscle forces in vivo is currently infeasible,and so measurements of body-segment kinematics,ground reaction forces, and muscle activity are often
e front matter r 2006 Elsevier Ltd. All rights reserved.
iomech.2005.12.017
ing author. Department of Mechanical and Manufac-
ring, The University of Melbourne, Mechanical
ilding, Block E, 4th Floor, Victoria 3010, Australia.
4 4054; fax: +613 9347 8784.
esses: [email protected] (A. Seth),
elb.edu.au (M.G. Pandy).
used, in conjunction with mathematical models, toestimate muscle forces non-invasively (Pandy, 2001).
A common approach is to use static optimization todecompose joint torques computed from an inversedynamics (IVD) analysis into individual muscle forces(Crowninshield and Brand, 1981). Although thisapproach is computationally efficient, it has severalshortcomings, beginning with the inaccuracies of IVD(Runge et al., 1995; Risher et al., 1997; Kuo, 1998, Zajacet al., 2002; Silva and Ambrosio, 2004). Static methodsperform a separate optimization at each instant duringthe task, and therefore cannot take into accountphysiological cost functions, such as total musculareffort or metabolic energy consumption, which areevaluated over time.

ARTICLE IN PRESS
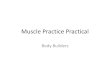
Fig. 1. Musculoskeletal model used to simulate vertical jumping. The
model consists of 6 degrees of freedom for motion in the sagittal plane:
foot, shank, thigh, and HAT angles, y1–y4, respectively; and foot
translations, r1 and r2. The model includes 9 musculotendon
actuators: gluteus maximus (GMAX), iliopsoas (ILPSO), hamstrings
(HAMS), biceps femoris short head (BFSH), rectus femoris (RF), vasti
(VAS), gastrocnemius (GAS), soleus (SOL), and tibialis anterior (TA).
Model parameters were based on data reported by Anderson and
Pandy (1999).
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366 357
In contrast, dynamic optimization performs a forwardsimulation to evaluate performance over the entire taskperiod. Generally speaking, dynamic optimization isimpractical for common use due to the computationalexpense incurred by the numerical methods used to solvethese problems (Anderson et al., 1995). For example, aparameter optimization (PO) solution that predicted themuscle excitations for a 3D human walking modelrequired more than 10,000CPU hrs on a 128-processorsupercomputer (Anderson and Pandy, 2001).
Dynamic optimization may be used to solve a‘tracking problem’, in which differences between modeloutputs (e.g., joint kinematics and ground forces) andexperimental observations of the same quantitiesare minimized (Davy and Audu, 1987). The intendedbenefit of the tracking formulation is to constrain themodel to produce more realistic results. Neptuneet al. (2001) used PO to solve a tracking problem forwalking; however, the ground forces computed by theirsimulation were noticeably different from experimentalresults, which indicates that accurate PO solutions aredifficult to obtain using complex musculoskeletalmodels.
More recently, control systems techniques have beenapplied to compute the set of joint torques necessary todrive biomechanical models through desired motions ina forward simulation, without applying optimization(Yamaguchi et al., 1995; Seth et al., 2003; Thelen et al.,2003). This method, referred to as ‘computed torques’(Spong and Vidyasagar, 1989), is more reliable thanIVD, as tracking-error feedback reduces inaccuracies inacceleration estimates. Thelen et al. (2003) extended thisapproach by incorporating static optimization todecompose computed torques into individual muscleactivations for a simulated pedaling task. However,existing optimal control techniques can be exploited toresolve the muscle redundancy problem dynamically.
The purpose of this paper is to demonstrate compu-tationally efficient and accurate techniques for estimat-ing joint torques and muscle forces in direct comparisonwith conventional approaches. In particular, a neuro-musculoskeletal tracking (NMT) method is presentedthat introduces two new developments. First, a skeletalmotion tracker is developed that incorporates groundreaction forces in tandem with model kinematics toimprove the accuracy of the computed torques method.Second, an optimal neuromuscular controller is devel-oped that tracks joint torques and resolves muscleredundancy dynamically. The accuracy and computingperformance of the NMT method are evaluated bytracking observations obtained from a PO solution of amaximum-height jump. Both the NMT and IVD resultsare then compared to the original PO solution. Jumpingwas chosen because this particular task embodiesfeatures that make tracking difficult: it is a highlydynamical task, one that is characterized by rapid
muscle force production, relatively unconstrained jointmotion, and nonlinear ground contact dynamics.
2. Methods
A planar musculoskeletal model of the human bodycomprising 4 segments, 6 degrees-of-freedom, and 9lower-limb muscles was used to simulate jumping(Fig. 1). PO was employed to determine the discretizedmuscle excitations (20 nodes per muscle) that maximizedjump height, subject to the model beginning from astatic squatting position (Pandy et al., 1992; Andersonand Pandy, 1999). An adaptive simulated annealing(ASA) algorithm (Ingber, 1993) was used to increaseconfidence that the solution obtained was a globalmaximum for the redundant biomechanical system. TheASA algorithm terminated after 100 objective function

ARTICLE IN PRESSA. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366358
evaluations with no improvement in performance. TheASA solution served as the initial guess (ug in Fig. 2A)to a sequential quadratic programming routine, whichthen ran until convergence was achieved.
The resulting muscle forces, joint torques, segmentangles, and ground forces defined the ‘‘actual’’ perfor-mance. Segment angles and ground forces were sampledat frequencies of 120 and 1080Hz, respectively, tocorrespond with typical motion-capture and force-platerecordings. Gaussian noise was added with a standarddeviation of 11, 21, 31 and 51 for the HAT, thigh, shank,and foot segment angles, respectively, while 2% of bodyweight was used for ground force/moment noise. Inorder to simulate non-random noise, such as skinmovement and other measurement artifacts, signal biaswas also added to the data with peak magnitudesequivalent to the noise standard deviations. The ground-moment acting on the foot segment (due to the distanceof the center-of-pressure from the foot center-of-mass)was biased by up to 20% of the peak moment tosimulate possible errors due to measurement offsets andfoot model inaccuracies. Bias was not present at timet ¼ 0 because the initial posture of the model could bechosen to match the observed posture, and the footsprings could be adjusted to match the initial groundforces. No ground-force bias was present at lift-offbecause the ground force must be zero at that time. Thenoise-contaminated segment angles and ground forces/moment, which simulated raw data recorded from amotion-capture experiment, were low-pass filtered usingcut-off frequencies of 10 and 50Hz, respectively. Thesedata served as the input ‘observations’ to the NMTmethod as well as an IVD analysis.
The NMT method has two stages. Skeletal motion
tracking, Stage 1, uses feedback linearization (Slotineand Li, 1991) to eliminate the nonlinearities associatedwith the skeletal dynamics (Fig. 2B, Stage 1), akin to thecomputed torques method (Spong and Vidyasagar,1989). However, we include ground-contact dynamicsto increase the accuracy of the computed torquesmethod. The equations of motion for skeletal dynamicscan be written as
€q ¼M�1½Iðq; _qÞ þ Sðq; _qÞ þ Tt�, (1)
where q ¼ ½y1; y2; y3; y4;r1;r2�T; M is the system mass
matrix; I is the set of generalized forces due to gravity,centripetal and Coriolis effects; S represents the non-linear spring dynamics used to model foot contact withthe ground; and T is the coefficient matrix relatingapplied joint torques, t, to segment torques. In first-order form, Eq. (1) becomes:
_Q ¼ F ðQÞ þ GðQÞ � t, (2a)
y ¼ ½y; s�T, (2b)
where Q ¼ ½q; _q�T, F ¼ ½ _q;M�1ðIþ SÞ�T, and G ¼ ½06�3;M�1T �T. The system output, y, is composed of thesegment angles, y, and the contact forces, s, whichinclude the fore-aft and vertical ground forces, as well asthe ground moment acting on the foot. In general, s caninclude any outputs of the contact model, such ascenter-of-pressure coordinates or lateral forces presentin a 3D model.
The translations of the foot (r1;r2) are excluded fromthe system output, as these quantities cannot bemeasured with sufficient precision to accurately evaluatethe spring contact dynamics.
To apply feedback linearization, an explicit relation-ship must be found between the outputs and the controls(joint torques). Differentiating the outputs, y, twice withrespect to time yields:
€yy ¼qqQ
qyqQ
F
� �F þ
qqQ
qyqQ� F
� �Gt. (3)
Eq. (3) gives the first four equations expressed in Eq. (1).Similarly, differentiating the ground-force output, s,once with respect to time gives
_ys ¼qs
qQF þ
qs
qQGt. (4)
Introducing a new control variable, v ¼ ½ €yy; _ys�T, such
that,
v ¼
qqQ
qyqQ� F
� �qs
26664
37775 � F þ
qqQ
qyqQ� F
� �qs
26664
37775 � G � t
and solving for the joint torques yields:
t ¼@@Q
@y@Q� F
� �@s@Q
24
35 � G
24
35�1
v�
@@Q
@y@Q� F
� �@s@Q
24
35 � F
8<:
9=;.
(5)
Eq. (5) is the feedback linearizing control law thattransforms the nonlinear system defined by Eqs. (3)–(4)into the linear system,
€yy
_ys
( )¼ v. (6)
This system is stabilized using linear feedback oftracking errors of sufficient order and with appropriategains to reject tracking errors:
v ¼
€y� 2lyð_y�_yÞ � l2yðy� yÞ
_S � lsðs� SÞ
8<:
9=;. (7)
The resultant control vector, v, is dependent on theobserved segment angles (y), the observed ground forces(S), and the model outputs (y). Because error dynamicsmust be faster than the frequency of the observations to

ARTICLE IN PRESS
ParameterOptimization
Musculoskeletal Dynamicsui Q, Si
ug u*, f *, τ*,
ˆˆ
Noise
Sample
Filter
QFeedbackLinearizingControl Law
Nonlinear PlantLinearized System
Tracking Error Dynamics
Q
�
..ˆ S
S
ˆ
Skeletal Dynamics
+_
+_
ss
v
Contact Model
�
�
xFeedback LinearizingControl Law
Nonlinear Plant
Linearized System
Optimal LQTControl Law
x
ˆ
u
Neuromuscular Dynamics
u(t)
a(t)
Musculoskeletal Geometry
MusculotendonForce
f
τ
ητ
�
+_
�*, S*
�, S
.
(A)
(B)
Fig. 2. Overview of methodology. (A) PO produces a maximum-height jump, where the optimal excitations, u�, muscle forces, f �, joint torques, t�,segment angles, y�, and ground-contact forces, S�, are then used to generate observations (y; S). (B) NMT framework. Stage 1: skeletal dynamics
(nonlinear plant) is characterized by joint torque inputs, t, states, Q, with selected kinematics, Y ¼ fy; _yg, and contact forces, s, as outputs. Linear
system controls, v, are determined from errors between skeletal outputs and their observed values (Y; S). Stage 2: Neuromuscular dynamics
(nonlinear plant) relate excitations, u, to muscle states, x, and muscle force outputs, f. A linear quadratic tracker (LQT) determines the optimal
controls, Z, based on torque tracking error, t� t, and muscle forces, f. t are known torques from Stage 1.
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366 359

ARTICLE IN PRESSA. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366360
ensure tracking stability, the poles of the criticallydamped system, l, were selected to be at least 5 timesgreater than the maximum frequency of the respectiveobservation. Note that the inverted matrix in Eq. (5) isnon-square: it relates 7 tracking references ðy1; y2; y3; y4;s1; s2; s3Þ to 3 joint torques. Because there are moreequations than unknowns, the joint torques, t, in Eq. (5)are evaluated in a weighted least-squares sense. Weight-ing more reliable observations more heavily in a least-squares approach has been shown to improve theaccuracy of inverse dynamics calculations (Kuo, 1998).We use the same approach within the inverse module ofthe skeletal motion tracker, but we include ground-contact dynamics (instead of enforcing a pinnedconstraint), so that the model can make and breakcontact with the ground. A least-squares approachincluding bias (Kuo, 1998) was also used to addresslarge measurement bias, typical of the ground moment.Values for the feedback system poles and least-squaresweightings are given in Appendix A. System Jacobianswere computed numerically to emphasize a generalapproach and to include the additional CPU time in theresults.
Neuromuscular tracking, Stage 2, determines theoptimal muscle excitations and muscle forces necessaryfor the neuromuscular system (Fig. 2B, Stage 2) togenerate the joint torques calculated in Stage 1. Theneuromuscular system is characterized by muscle con-traction dynamics and muscle activation dynamics(Zajac, 1989), which relate muscle excitations, u, tomusculotendon forces, FMT. The complete neuromus-cular dynamics can be described as a system suitable forfeedback linearization:
_x ¼ AðxÞ þ BðxÞ � u, (8a)
f ¼ FMTðxÞ, (8b)
where x ¼ ½a; lM; lMT�T contains the neuromuscular
system states of muscle activations, muscle lengths,and musculotendon lengths, respectively; and the out-put, f, contains the musculotendon forces, FMT, as afunction of x. Differentiating the output vector, f, once,and defining a new control vector Z ¼ _f , yields thefeedback-linearizing control law:
u ¼qFMT
qx� B
� ��1Z�
qFMT
qx� A
� (9)
and the corresponding linear system:
_f ¼ Z, (10a)
t ¼ C � f , (10b)
where the outputs of the feedback-linearized system arethe joint torques, t, and C is the matrix of musclemoment arms. Moment arms were obtained fromAnderson (1999) as functions of y.
The problem is to determine the controls, Z, needed tominimize torque-tracking error and muscle effortexpressed as the performance index:
J ¼1
2ðtðtf Þ � tðtf ÞÞ
TPðtðtf Þ � tðtf ÞÞ
þ1
2
Z tf
0
½ðt� tÞTQðt� tÞ þ ZT � R � Z�dt, ð11Þ
where P is the weighting matrix for the tracking error atthe final time, tf; Q is the weighting matrix for thecontinuous tracking error; and R is the weighting matrixfor the continuous muscle effort. t denotes the set ofreference joint torques obtained from skeletal motiontracking. When muscle force rates, Z, are normalized bypeak isometric force, the time integral of their squaredsum defines muscular effort, which has the same units assquared stresses in the static sense. Effort, however, is acumulative value evaluated over the entire task period.Pandy et al. (1995) used a similar cost function tocalculate muscle force in rising from a chair.
The linearized system (Eq. (10)) and the performanceindex (Eq. (11)) describe a linear-quadratic tracking(LQT) problem. LQT solution methods are wellestablished in the optimal control literature (e.g. Brysonand Ho, 1969; Lewis and Syrmos, 1995), and involvesolving the system Ricatti matrix and adjoint equationsfor the affine feedback control law, Z, as a function of f
and t. The optimal muscle excitations are subsequentlyevaluated from Eq. (9), and the neuromuscular system(Eq. (8)) is then integrated forward in time to yield therequired muscle forces. The weighting matrices, Q andR, were chosen to obtain sufficiently low tracking error.Details of the LQT implementation are presented inAppendix B.
3. Results
The PO algorithm required over 21,000 evaluations ofjump height to converge to a solution, which took morethan 24 h of CPU time. The optimal solution produced ajump height of 60.1 cm, in close agreement with earlierfindings by Anderson and Pandy (1993), who used asimilar model. The NMT method took 84 s of CPU time(28 s for skeletal motion tracking plus 56 s for neuro-muscular tracking) to determine continuous muscleexcitation histories for jumping on the same desktop PC.
There was good agreement between the joint torquescalculated by the skeletal motion tracker and the actualtorques obtained from PO (Fig. 3A). Small differenceswere evident and were attributable to the significance ofrandom and bias noise, but these differences did notinfluence the ability of the skeletal motion tracker toaccurately reproduce the observed segment angles andground forces/moment (Figs. 3B–D). The segmentkinematics produced by the skeletal motion tracker

ARTICLE IN PRESS
0 0.05 0.1 0.15 0.2 0.250.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
time (s)
Ang
le (
rad)
0 0.05 0.1 0.15 0.2
0
500
1000
1500
2000
2500
3000
time (s)
For
ce (
N)
(B)
(C)
HATThighShankFootSKTActualIVDRaw
VerticalHorizontalSKTActualIVDRaw
0 0.05 0.1 0.15 0.2 0.25−400
−200
0
200
400
−400
−200
0
200
Tor
que
(N.m
)
−200
0
200
400
time (s)
HIP
KNEE
ANKLE
(A)
(D)
SKTActualIVD
Fig. 3. (A) Joint torques for a maximum-height jump determined by skeletal motion tracking (SKT) and inverse dynamics (IVD) compared to the
actual torques obtained from parameter optimization (Actual). (B) Segment angles obtained from skeletal motion tracking (SKT) compared to
filtered inputs (square, diamond, triangle, circle) and actual values (Actual) overlaid upon unfiltered observations (Raw). (C) Comparison of ground
reaction forces and (D) ground moment using the same line types as in part (B). Torques obtained from inverse dynamics were applied to the model
in a forward simulation to generate segment motion and ground forces (IVD, dashed lines). The inverse dynamics simulation terminates earlier than
the observed data because inaccuracies in the computed torques caused the model to leave the ground prematurely.
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366 361
were closer to the actual kinematics than the observedquantities (Fig. 3B), and the bias in the ground momentobservation was practically eliminated (Fig. 3D).
The joint torques computed from an IVD analysiswere significantly different from the actual torques
(Fig. 3A). Furthermore, when the IVD torques wereused in a forward simulation of the model, the resultingsegment angles and ground forces deviated from theactual trajectories (Fig. 3B), causing the model to leavethe ground early (Fig. 3C).

ARTICLE IN PRESS
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
1.2
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
GMAX ILPSOHAMS
RF
TA
VAS BFSH
SOL GAS
time (s)
Exc
itat
ion
an
d N
orm
aliz
ed F
orc
e
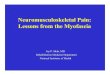
Fig. 4. Muscle excitations (thick gray) and normalized muscle forces (thick dashed gray) computed by the NMT method compared to muscle
excitations (thin black) and normalized muscle forces (thin black dashed) determined by parameter optimization. Muscle force is normalized by
maximum isometric muscle force. See Fig. 1 for muscle abbreviations.
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366362
Muscle excitations determined by neuromusculartracking indicated muscle activity timings that were inagreement with the actual muscle inputs, except forthose of HAMS and RF. There was better agree-ment between the muscle forces estimated by theneuromuscular tracker and the actual muscle forcesfor most of the muscles in the model (Fig. 4).Coordination of the hip and knee extensors and ankleplantarflexors (GMAX, VAS, SOL, and GAS), theprime movers for vertical jumping (Pandy et al., 1990;van Soest et al., 1993), was consistent with that
predicted by PO, but the peak force calculated forVAS was lower in the NMT solution. The mostsignificant difference between the two methods wasrelated to the forces calculated for HAMS and RF. Forboth of these muscles, the forces computed by the NMTmethod were much lower than those obtained by PO.Overall, however, the NMT torques were similar to theactual torques (Fig. 5A), and produced segment anglesand ground forces that nearly duplicated the actualvalues (Figs. 5B and C), resulting in a jump heightof 58.8 cm.

ARTICLE IN PRESS
0 0.05 0.1 0.15 0.2 0.250
100
200
300
400
−300
−200
−100
0
Tor
que
(N.m
)
−200
−100
0
200
300
400
time (s)
HIP
KNEE
ANKLE
(A)
NMTActualSKT
0 0.05 0.1 0.15 0.2 0.250.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
time (s)
Ang
le (
rad)
0 0.05 0.1 0.15 0.2 0.25
500
1000
1500
2000
time (s)
For
ce (
N)
(C)
(B)
HATThighShankFootNMTActual
VerticalHorizontal
ActualNMTMoment (N·m)
0
Fig. 5. (A) Individual joint torques for a maximum-height jump resulting from forces computed by the neuromuscular tracker (NMT) compared to
the actual torques predicted by parameter optimization (Actual). Joint torques obtained from the skeletal motion tracker (SKT) are also shown (from
Fig. 3A). Segment angles (B) and ground reaction forces (C) resulting from the NMT method (NMT) compared to the actual performance (Actual)
and the input observations (square, diamond, triangle, circle).
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366 363
4. Discussion
The purpose of this study was to present a compu-tationally efficient and accurate method for calculatingindividual muscle forces during human movement, incontrast to more widely used approaches like IVD andPO. Forward simulation accuracy is obtained bydynamically tracking kinematics and ground forces,whereas computational speed is obtained by posing thedynamic optimization problem as an LQT problem. Inthis way, system dynamics are integrated once, ratherthan thousands of times, as is often required by PO(Pandy et al., 1992; Anderson and Pandy, 2001). Theresults demonstrate that the NMT method can produceestimates of muscle forces roughly 1000 times fasterthan PO.
Whilst the concept of tracking has been usedpreviously to estimate muscle forces from humanmovement data (Davy and Audu, 1987; Neptuneet al., 2001; Thelen et al., 2003, 2005), the twodevelopments introduced by the NMT method offerdistinct advantages. First, ground-force references in-cluded in skeletal motion tracking produce moreaccurate estimates of joint torques, which are neededin order to perform an accurate forward simulation ofthe movement. Our results demonstrate very clearly thatthe joint torques computed from IVD cannot be usedfor this purpose (Fig. 3). Unlike IVD, the NMT methoddoes not apply measured ground forces directly to amodel; instead, it expects ground forces to be synthe-sized by the model in order to be compared to observeddata. Synthesis improves simulation accuracy because

ARTICLE IN PRESSA. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366364
the model must satisfy both the link-segment kinematicsand ground-contact dynamics together, which reflect thereality that body motion and ground reaction forces arecoupled. Many IVD analyses inadvertently decouplekinematics from ground forces by including residualforces to account for inconsistencies between inputaccelerations and ground forces. The NMT method doesnot adjust input segment kinematics or ground forces inorder to eliminate residual forces (Thelen et al., 2005).Accordingly, the skeletal motion tracker producedjumping kinematics that agreed more closely with theactual kinematics than with the observed data (Fig. 3B,Foot and Shank). This occurred because the modelclosely tracked more accurate ground reaction forces,which were more heavily weighted than the segmentkinematics.
The second advantage offered by the NMT method isthat it solves the muscle redundancy problem byoptimizing muscle performance over the entire taskperiod. Because neuromuscular tracking is decoupledfrom the nonlinearities of skeletal dynamics in theoptimal control problem, more efficient LQT techniquescan be exploited when solving the problem of muscleredundancy. Thelen et al. (2003) introduced an ap-proach that is conceptually similar to the NMTapproach, but utilizes static optimization to resolve themuscle redundancy. Unfortunately, static optimizationcannot accommodate time-dependent performance cri-teria, such as total muscular effort. Menegaldo et al.(2005) formulated a similar minimization of torque-tracking error and muscular effort in order to dynami-cally determine individual muscle forces for posturalcontrol. However, the problem was solved using ageneral recursive optimal control solver and required anaverage of 87min to compute muscle forces, whichtracked ideal torques obtained from a previous posturalcontrol simulation. By comparison, our neuromusculartracker required 56 s to track non-ideal torques com-puted from noisy data for a highly dynamical task.
Although the NMT method and PO both solved adynamic optimization problem, the optimization pro-blems were different, which explains why the muscleexcitations and forces computed by these two methodswere not identical (Fig. 4). Whereas PO maximized jumpheight without regard to the cost of generating muscleforce, the NMT method minimized torque-trackingerror and muscle effort. It is not surprising, therefore,that the NMT solution utilized less co-contraction(Fig. 4, compare HAMS to VAS and RF) to satisfythe muscle effort criterion. Differences are also attrib-uted to the different solution techniques used to solvethe optimal control problem. Nodal excitation valuesare optimized by PO and thus limit the rate of variation,whereas the NMT method can vary excitations instan-taneously, consistent with neural impulses, and therebyappear to be more erratic (Fig. 4, compare solid lines). It
is important to note that neither the NMT nor the POsolution corresponded well to EMG data reported byAnderson and Pandy (1999) for HAMS and RF. Bothmethods, however, produced a proximal-to-distal se-quence of muscle recruitment, consistent with experi-ment (Bobbert and van Ingen-Schenau, 1988; Pandyet al., 1990; Anderson and Pandy, 1993, 1999).
Another potential benefit of the NMT method is thatit can be extended to track other experimental data, inthe same way that ground forces were included in Stage1. For example, in addition to tracking joint torques, theneuromuscular tracker could track available EMGsignals. To do so, outputs representing EMG, such asmuscle activations, would simply be added to theneuromuscular system. This is an attractive option,given that EMG data has been shown to improve thequality of forward simulations of movement (White andWinter, 1993; Jonkers et al., 2002; Lloyd and Besier,2003).
While the NMT method has several distinct advan-tages, it is not without limitations. First, the methodrequires a priori motion data to define the trackingproblem, which means that its accuracy depends on theaccuracy of the movement observations, plus themethod cannot be used to predict novel movements.In contrast, PO can theoretically be used to solvedynamic optimization problems without prior knowl-edge of the movement pattern.
Second, the NMT method becomes more complexand incurs more CPU cost when other performancecriteria are included. Because the NMT method exploitsthe LQT formulation to achieve computational effi-ciency, performance criteria that cannot be written asquadratics of the current neuromuscular outputs mustbe appended to the neuromuscular system with theirown dynamics and outputs. To minimize metabolicenergy consumption, for example, nonlinear energydynamics would be appended to the neuromuscularsystem with energy consumption as an output (Eq. (8b)).The additional output(s) would appear as states in thefeedback-linearized system (Eq. (10a)), and these stateswould then be incorporated into the performance index(Eq. 11). Because the bulk of the computation involvesintegrating the Ricatti matrix equation, we estimate thatCPU requirements for Stage 2 will increase in propor-tion to the square of the number of neuromuscularoutputs. This expense, however, pales in comparison tothe cost of PO, where the search space is proportional tothe power of the number of design variables.
Third, the NMT method can behave unpredictablydue to model instability and loss of controllability.Excessive noise contamination can lead the unstablejumping model into a physical configuration such thatall future desired states are unreachable. For example,inaccurate observations can cause the model to leanforward so that its COM is beyond the toes, at which

ARTICLE IN PRESS
Table 1
Skeletal motion tracking system poles (l) and least-squares weightings (w)
y li wi
y1 50 0.001
y2 50 0.7
y3 50 0.8
y4 50 1.0
s1 1000 2.0
s2 1000 2.0
s3 1000 1.0
A. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366 365
point it is no longer possible to halt forward movement.Deviation between the model and the desired states canalso occur due to drift in model states, when there isinsufficient feedback to influence each independentstate. For example, in the skeletal-motion tracker, 7observations determine 3 unique controls, but, becausethe model is a 6-dof mechanical system (i.e. 6independent states), 6 independent errors are necessaryto ensure controllability. Thus, when selecting trackerweightings, one must be cognizant of how these weightscan cause the tracker to effectively ignore measurementsthat lead to a loss of control.
In summary, the NMT method is an attractivealternative to the conventional approach of combininginverse dynamics and static optimization to computemuscle forces in human movement, particularly forcomplex musculoskeletal models with ground interac-tion. This study demonstrates how tracking precision ofnoisy kinematics, in particular, is not an adequatemeasure of performance accuracy, and that satisfyingboth kinematics and ground reaction forces simulta-neously is necessary to generate truly accurate results.Because the NMT method estimates muscle forcesquickly and produces accurate forward simulations forhighly dynamic movements, like jumping, we believe it isa potentially valuable tool for understanding the roles ofindividual muscles and for characterizing joint and soft-tissue loading.
Acknowledgments
Funding was provided by an NSF EngineeringResearch Centers Grant (EEC-9876363). Additionalsupport provided to AS by an ISB 2004 Dissertationgrant and to MGP by a VESKI Fellowship.
Appendix A
The skeletal motion tracking poles, l, which definegains on the feedback errors, were selected initially bymultiplying the filter cut-off frequencies of eachmeasurement by five. Doubling, tripling, and quadru-pling the pole values associated with ground forcessuccessively improved ground force tracking accuracy,but multiplying by a factor of 5 resulted in no furtherimprovement. The least-squares weightings were as-signed according to the accuracy of each measurement,such that HAT angle and ground forces were eachassigned a value of 1, while thigh, shank and foot angleswere assigned progressively less weights. Ignoring footrotations reduced tracking error even further, as did thedoubling of ground-force weights. The ground moment(s3) pole was not doubled, as it had considerably morebias than did the vertical and fore-aft forces. Skeletal
motion tracking parameters used to generate the resultspresented in the text are given in Table 1. Marginalreductions in tracking error were obtained by refiningthese parameters even further.
Appendix B
The Ricatti matrix equation for the NMT–LQTsystem (Eqs. (8)–(11)) is
� _W ¼ �W � R�1 �W þ CT �Q � C, (12)
where W ðtf Þ ¼ CTPC. The adjoint for the closed-loopsystem yields the differential equation for tracking thetorque reference signal,
�_g ¼ �ðR�1 �W ÞTgþ CT �Q � t, (13)
where gðtf Þ ¼ CTPtðtf Þ. Integrating backwards from tf
yields W ðtÞ and gðtÞ, which are required to compute theaffine feedback control law,
Z ¼ �ðR�1W Þf þ R�1 � g. (14)
Minimizing total torque-tracking at the final time isnot a concern, therefore P ¼ ½0�3�3. Joint torque-tracking errors are treated independently and are ofequal importance so that
Q ¼ kQ � ½diagonalf1 1 1g�.
Because R is the weighting for the rate of forceproduction, Z, squared (Eq. (11)), Ri was normalized bythe squared peak isometric force of the correspondingmuscle. The biarticular muscles (HAMS, RF, and GAS)were initially scaled by 1
2to encourage the re-distribution
of loading to these muscles, and these weightings wereadjusted further to encourage loading of HAMS and RFin particular. The final weightings used for R are asfollows:
R ¼ kR � diagonal1
f 2gmax
1
f 2ilpso
0:1
f 2hams
0:3
f 2rf
1
f 2vas
("
1
f 2bfsh
0:75
f 2gas
1
f 2sol
1
f 2ta
)#.

ARTICLE IN PRESSA. Seth, M.G. Pandy / Journal of Biomechanics 40 (2007) 356–366366
Making kR ¼ 1000 improved the conditioning of theRicatti matrix equation (Eq. (12)), and kQ was increasedto further reduce torque-tracking errors. The resultspresented correspond to kQ ¼ 1500.
References
Anderson, F.C., 1999. A dynamic optimization solution for a complete
cycle of gait. Ph.D. University of Texas at Austin, Austin, TX.
Anderson, F.C., Pandy, M.G., 1993. Storage and utilization of elastic
strain energy during jumping. Journal of Biomechanics 26 (12),
1413–1427.
Anderson, F.C., Pandy, M.G., 1999. A dynamic optimization solution
for vertical jumping in three dimensions. Computer Methods in
Biomechanics and Biomedical Engineering 2, 201–231.
Anderson, F.C., Pandy, M.G., 2001. Dynamic optimization of human
walking. Journal of Biomechanical Engineering 123, 381–390.
Anderson, F.C., Ziegler, J.M., Pandy, M.G., Whalen, R.T., 1995.
Application of high-performance computing to numerical simula-
tion of human movement. Journal of Biomechanical Engineering
117, 155–157.
Bobbert, M.F., van Ingen-Schenau, G.J., 1988. Coordination in
vertical jumping. Journal of Biomechanics 21 (3), 249–262.
Bryson, A.E., Ho, Y.-C., 1969. Applied Optimal Control. Ginn and
Company, Massachusetts.
Crowninshield, R.D., Brand, R.A., 1981. A physiologically based
criterion of muscle force prediction in locomotion. Journal of
Biomechanics 14 (11), 793–801.
Davy, D.T., Audu, M.L., 1987. A dynamic optimization technique for
predicting muscle forces in the swing phase of gait. Journal of
Biomechanics 20 (2), 187–201.
Ingber, L., 1993. Simulated annealing: practice versus theory.
Mathematical and Computer Modelling 18 (11), 29–57.
Jonkers, I., Spaepen, A., Papaioannou, G., Stewart, C., 2002. An
EMG-based, muscle driven forward simulation of single support
phase of gait. Journal of Biomechanics 35, 609–619.
Kuo, A.D., 1998. A least-squares estimation approach to improving
the precision of inverse dynamics computations. Journal of
Biomechanical Engineering 120, 148–159.
Lewis, F.L., Symros, V.L., 1995. Optimal Control, second ed. Wiley,
New York.
Lloyd, D.G., Besier, T.F., 2003. An EMG-driven musculoskeletal
model to estimate muscle forces and knee joint moments in vivo.
Journal of Biomechanics 36, 765–776.
Menegaldo, L.L., Fleury, A.T., Weber, H.I., 2005. A ‘cheap’ optimal
control approach to estimate muscle forces in musculoskeletal
systems. Journal of Biomechanics, in press, doi:10.1016/j.biomech.
2005.05.029.
Neptune, R.R., Kautz, S.A., Zajac, F.E., 2001. Contributions of the
individual ankle plantar flexors to support, forward progression
and swing initiation during walking. Journal of Biomechanics 34,
1387–1398.
Pandy, M.G., 2001. Computer modeling and simulation of human
movement. Annual Review of Biomedical Engineering 3, 245–273.
Pandy, M.G., Zajac, F.E., Sim, E., Levine, W.S., 1990. An optimal
control model for maximum-height human jumping. Journal of
Biomechanics 23 (12), 1185–1198.
Pandy, M.G., Anderson, F.C., Hull, D.G., 1992. A parameter
optimization approach for the optimal control of large-scale
musculoskeletal systems. ASME Journal of Biomechanical En-
gineering 114 (4), 343–363.
Pandy, M.G., Garner, B.A., Anderson, F.C., 1995. Optimal control of
non-ballistic muscular movements: a constraint-based performance
criterion for rising from a chair. Journal of Biomechanical
Engineering 117, 15–26.
Risher, D.W., Shutte, L.M., Runge, C.F., 1997. The use of inverse
dynamics solutions in direct dynamics simulations. Journal of
Biomechanical Engineering 119, 417–422.
Runge, C.F., Zajac, F.E., Allum, J.H.J., Risher, D.W., Bryson, A.E.,
Honegger, F., 1995. Estimating net joint torques from kinesiolo-
gical data using optimal linear system theory. IEEE Transactions
on Biomedical Engineering 42 (12), 1158–1164.
Seth, A., McPhee, J.J., Pandy, M.G., 2003. Multi-joint coordination of
vertical arm movement. Journal of Applied Bionics and Biome-
chanics 1 (1), 45–56.
Silva, M.P., Ambrosio, J.A., 2004. Sensitivity of the results produced
by the inverse dynamic analysis of a human stride to perturbed
input data. Gait and Posture 19, 35–49.
Slotine, J.-J., Li, W., 1991. Applied Nonlinear Control. Prentice-Hall,
Englewood Cliffs, NJ.
Spong, M.W., Vidyasagar, M., 1989. Robot Dynamics and Control.
Wiley, Toronto.
Thelen, D.G., Anderson, F.C., 2005. Using computed muscle control
to generate forward dynamic simulations of human walking from
experimental data. Journal of Biomechanics, in press, doi:10.1016/j.
biomech.2005.02.010.
Thelen, D.G., Anderson, F.C., Delp, S.L., 2003. Generating dynamic
simulations of movement using computed muscle control. Journal
of Biomechanics 36, 321–328.
van Soest, A.J., Schwab, A.L., Bobbert, M.F., van Ingen Schenau,
G.J., 1993. The influence of the biarticularity of the gastrocnemius
muscle on vertical-jumping performance. Journal of Biomechanics
26, 1–8.
White, S.C., Winter, D.A., 1993. Predicting muscle forces in gait from
EMG signals and musculotendon kinematics. Journal of Electro-
myography and Kinesiology 4 (1), 217–231.
Yamaguchi, G.T., Moran, D.W., Si, J., 1995. A computationally
efficient method for solving the redundant problem in biomecha-
nics. Journal of Biomechanics 28, 999–1005.
Zajac, F.E., 1989. Muscle and tendon: properties, models, scaling, and
application to biomechanics and motor control. Critical Reviews in
Biomedical Engineering 17 (4), 359–411.
Zajac, F.E., Neptune, R.R., Kautz, S.A., 2002. Biomechanics and
muscle coordination of human walking, Part I: introduction to
concepts, power transfer, dynamics and simulations. Gait and
Posture 16, 215–232.