Embed Size (px)
Citation preview

i
A Multi-Temporal Remote Sensing Approach to Freshwater Turtle Conservation
by
Amy B. Mui
A thesis submitted in conformity with the requirements for the degree of Doctor of Philosophy
Department of Geography University of Toronto
© Copyright by Amy B. Mui 2015

ii
A multi-temporal remote sensing approach to
freshwater turtle conservation
Amy Mui
Doctor of Philosophy
Department of Geography
2015
Abstract
Freshwater turtles are a globally declining taxa, and estimates of population status are not
available for many species. Primary causes of decline stem from widespread habitat loss and
degradation, and obtaining spatially-explicit information on remaining habitat across a relevant
spatial scale has proven challenging. The discipline of remote sensing science has been
employed widely in studies of biodiversity conservation, but it has not been utilized as frequently
for cryptic, and less vagile species such as turtles, despite their vulnerable status. The work
presented in this thesis investigates how multi-temporal remote sensing imagery can contribute
key information for building spatially-explicit and temporally dynamic models of habitat and
connectivity for the threatened, Blanding’s turtle (Emydoidea blandingii) in southern Ontario,
Canada.
I began with outlining a methodological approach for delineating freshwater wetlands from high
spatial resolution remote sensing imagery, using a geographic object-based image analysis
(GEOBIA) approach. This method was applied to three different landscapes in southern Ontario,
and across two biologically relevant seasons during the active (non-hibernating) period of
Blanding’s turtles. Next, relevant environmental variables associated with turtle presence were
extracted from remote sensing imagery, and a boosted regression tree model was developed to

iii
predict the probability of occurrence of this species. Finally, I analysed the movement potential
for Blanding’s turtles in a disturbed landscape using a combination of approaches. Results
indicate that (1) a parsimonious GEOBIA approach to land cover mapping, incorporating texture,
spectral indices, and topographic information can map heterogeneous land cover with high
accuracy, (2) remote-sensing derived environmental variables can be used to build habitat
models with strong predictive power, and (3) connectivity potential is best estimated using a
variety of approaches, though accurate estimates across human-altered landscapes is challenging.
Overall, this body of work supports the use of remote sensing imagery in species distribution
models to strengthen the precision, and power of predictive models, and also draws attention to
the need to consider a multi-temporal examination of species habitat requirements.

iv
Acknowledgments
First and foremost, I would like to thank my advisor Dr. Yuhong He, who has been
instrumental in my academic success, but has also contributed so much as a mentor, a
confidante, and a great friend. She has always answered my frantic queries with a lightning
quick response time, troubleshoots my problems with such insight and apparent ease, and
does all of this with an eternal optimism that has kept me going all these years. Yuhong, by
your example I am a better researcher, writer, and teacher, and I move forward with strong
confidence in my ability to balance a healthy work life with a thriving family life. This
much I owe to you, and more. Thank you for your unrelenting faith in me, and for a
journey that has been so enjoyable because I had you in my corner.
Many graduates have told me that having a good supervisory committee, is paramount in
successfully and enjoyably navigating a PhD, and I could not have been more fortunate in
this regard. Dr. Jing Chen, and Dr. Nathan Basiliko, your positive energy, encouragement,
and support have meant a lot to me. A special thank you to Dr. Marie-Josée Fortin for
providing such insightful suggestions regarding my research, for guiding the biologist in
me, and for always treating me such care and kindness. To Bob Johnson, and Julia Phillips
from the Toronto Zoo; I was lucky to have once worked at the zoo and made your
acquaintance earlier on, but never would I have guessed that it would have led to such a a
long and rewarding relationship. I would like to express my appreciation for your support,
given in so many ways, and through so many opportunities. I hope what I have produced
here will make you proud.
To those wild and courageous souls who donned such fashionable waders and trekked
through the wetlands with me, I extend my sincere thanks and appreciation. Through rain
or shine, clouds of blackflies and biting toads, while dragging a canoe through dried up
wetlands, or falling out of them into leech-prone waters, I could not have accomplished
what I have without you, but more importantly you made it all so much fun! A special
thank you to Brennan Caverhill and James Paterson for introducing me to the less travelled
world of wetlands and the wonders held therein; to Kelly Wong for making field
campaigns fun and never tedious, and to all my other adventurous field assistants. Thank

v
you also Christopher Edge, James Paterson, and Dr. Jackie Litzgus of Laurentian
University for sharing your data, and also to Brad Steinberg of the Ministry of Natural
Resources, Parks and Protected Areas, Dr. Leo Cabrera of Parks Canada, and Frank
Dorombozi (Brant County) for such generous field support and interest in this work.
Primary funding for this research was provided by an NSERC IPS grant sponsored by the
Toronto Zoo, an Ontario Graduate Scholarship, the William G. Dean scholarship from the
University of Toronto, and the generous support of the Department of Geography at UTM.
To my fellow graduates, past and present, you have enriched my time at the University of
Toronto and made it about so much more than just an overwhelming workload. Special
thank you to Randy Bui, Kelly Wong, Varun Gupta, and Carolyn Winsborough, for all the
laughs and the impromptu stress relief.
To my family, thank you for supporting me unconditionally, and most especially
throughout the past few years. After returning to my studies following maternity leave,
when I was struggling mightily with a young child and the dual demands of work and
family life, you helped to lighten my load by bringing food, helping with day care pick-ups,
and lending a sympathetic ear when I felt I was at my lowest. Thank you especially to my
sister for all the home-cooked meals, and to my dad for always showing such a keen
interest in my research, even though I was terrible at explaining it. To my mom, you left us
much too early but you have always been close by and I hope you can see what I have
accomplished!
To my husband, you showed your support in so many ways other than words, and I thank
you for single-parenting all those nights so that I could work late, and for waiting for my
call no matter the time, so you could talk to me as I walked across the dark parking lot to
my car. I could not have made it here without you. Last of all, but first in my heart, to my
little Georgie who reminds me that life is beautiful and simple. Around you, I (literally)
forget about R codes, statistical assumptions, and grant applications past due, and instead
take pleasure in the most important things in life; like hiding from zombies, and climbing
up slides.
Finishing this PhD was not just about returning back to academia and earning another
degree, but about growing intellectually and emotionally. I learned how to read and how to

vi
write (naively having thought that I already knew how to do those two things), and also
how to teach, how to lead, and how to disseminate. But even more than that, I learned that
my limits are further than I thought they were, and that my family and friends will never let
me fall.
Like others before me, I stood on the shoulders of giants and now I can see a little further
than I did before.
Thank you to everyone who walked beside me along this journey.
Amy

vii
Table of Contents
Acknowledgments.......................................................................................................................... iv
Table of Contents .......................................................................................................................... vii
List of Tables ...................................................................................................................................x
List of Figures ............................................................................................................................... xii
List of Appendices ....................................................................................................................... xvi
Chapter 1 ........................................................................................................................................1
Introduction ....................................................................................................................................1
Global Status of Chelonians.................................................................................................1
Remote Sensing and Biodiversity ........................................................................................4
Wetlands and Freshwater Turtles .........................................................................................5
Thesis Structure ...................................................................................................................7
1.4.1 Chapter Two: An object-based approach to delineate wetlands across
landscapes of varied disturbance with high spatial resolution satellite imagery .....8
1.4.2 Chapter Three: Modelling seasonal wetland habitat suitability for Blanding’s
turtles (Emydoidea blandingii) using optical satellite remote sensing imagery ......9
1.4.3 Chapter Four: Estimating seasonal landscape connectivity for Blanding’s
turtles in a fragmented agricultural landscape .......................................................10
Statement of research collaboration and manuscript submission ......................................11
References .................................................................................................................................11
Chapter 2 ......................................................................................................................................15
An object-based approach to delineate wetlands across landscapes of varied
disturbance with high spatial resolution satellite imagery ..................................................15
Introduction ........................................................................................................................15
Study Area .........................................................................................................................18
Data and Methods ..............................................................................................................19
2.3.1 Satellite Imagery and Preprocessing ......................................................................21
2.3.2 Development of Input Layers .................................................................................22
2.3.3 Image Segmentation ...............................................................................................24
2.3.4 Classification Approach .........................................................................................28
2.3.5 Accuracy assessment ..............................................................................................33
Results ................................................................................................................................34
2.4.1 Multi-scale segmentation .......................................................................................34
2.4.2 Classification ..........................................................................................................41
2.4.3 Comparison of Sample Attribute Separation between Classes ..............................46
Discussion ..........................................................................................................................47
2.5.1 Segmentation and the GEOBIA approach .............................................................48
2.5.2 Classification Accuracy ..........................................................................................49
2.5.3 Landscape heterogeneity ........................................................................................52

viii
Conclusions ........................................................................................................................53
References .................................................................................................................................54
Chapter 3 ......................................................................................................................................60
Modelling seasonal wetland habitat suitability for Blanding’s turtles (Emydoidea
blandingii) using optical satellite remote sensing imagery ..................................................60
Introduction ........................................................................................................................60
Materials and Methods .......................................................................................................63
3.2.1 Study Area ..............................................................................................................63
3.2.2 Satellite Imagery ....................................................................................................64
3.2.3 Study Population & Telemetry Data ......................................................................65
3.2.4 Temporal Partitioning ............................................................................................66
3.2.5 Environmental Input Variables ..............................................................................67
3.2.6 Pseudo-absence (Background) Sampling ...............................................................69
3.2.7 Linking Biophysical Variables to Satellite Data ....................................................71
3.2.8 Calculating Landscape Metrics ..............................................................................75
3.2.9 Extracting Topographic Data .................................................................................77
3.2.10 Models and Model Fitting ......................................................................................78
3.2.11 Evaluation and Evaluation Criteria ........................................................................79
Results ................................................................................................................................80
3.3.1 Regression Models in Biophysical Variable Estimation ........................................80
3.3.2 BRT and Logistic Regression Model Results ........................................................82
3.3.3 Comparison of variable contribution ......................................................................84
3.3.4 BRT model comparison .........................................................................................86
3.3.5 Probability of occurrence maps ..............................................................................90
3.3.6 Map accuracy .........................................................................................................90
Discussion ..........................................................................................................................94
3.4.1 Biophysical Analysis ..............................................................................................94
3.4.2 Satellite-derived predictors ....................................................................................95
3.4.3 Model comparison ..................................................................................................96
3.4.4 Seasonal change .....................................................................................................96
3.4.5 Landscape Comparison ..........................................................................................99
Conclusions ......................................................................................................................100
References ...............................................................................................................................101
Chapter 4 ....................................................................................................................................106
Estimating seasonal landscape connectivity for Blanding’s turtles in a fragmented
agricultural landscape ..........................................................................................................106
Introduction ......................................................................................................................106
Methods............................................................................................................................109
4.2.1 Study Area and Blanding’s Turtle Population .....................................................109
4.2.2 Seasonal Land cover Maps and Habitat Nodes ....................................................111

ix
4.2.3 Resistance Layers .................................................................................................112
4.2.4 Connectivity Modelling Overview .......................................................................114
4.2.5 Evaluation .............................................................................................................117
Results and Discussion ....................................................................................................117
4.3.1 Least-Cost Pathways & Patch-based Indices .......................................................117
4.3.2 Circuit-based corridors .........................................................................................120
4.3.3 Barrier Mapping ...................................................................................................122
Conclusions ......................................................................................................................125
References ...............................................................................................................................127
Chapter 5 ....................................................................................................................................132
Thesis Summary and Conclusion .............................................................................................132
Chapter Synthesis.............................................................................................................132
Management Applications and Future Direction .............................................................134
APPENDIX ..................................................................................................................................137

x
List of Tables
Table 2-1. Satellite Image data information ................................................................................. 21
Table 2-2. Land cover class descriptions adapted from Anderson et al., (1976) and the Canadian
wetland classification system (National Wetlands Working Group, 1997). ................................. 30
Table 2-3. Wetland land cover class descriptions according to the Canadian Wetland
Classification System (NWWG, 1997). ........................................................................................ 31
Table 2-4. Hierarchical segmentation scale for each study site and corresponding target land
cover class ..................................................................................................................................... 34
Table 2-5. Accuracy statistics for land cover classes at each study site (PA = producer’s
accuracy, UA = user’s accuracy). ................................................................................................. 42
Table 2-6. Error matrix for the landcover classification of the Brant County agricultural site (7
classes) using GeoEye1 MS data .................................................................................................. 43
Table 2-7. Error matrix for the landcover classification of the Algonquin park study site (8
classes), using GeoEye1 MS data. ................................................................................................ 43
Table 2-8. Error matrix for the landcover classification of the east Toronto urban site (8 classes)
using WorldView2 MS data.......................................................................................................... 44
Table 2-9. Accuracy statistics of producer’s accuracy (PA), user's accuracy (UA), overall
accuracy and Kappa statistic for merged wetland, upland, and water classes across all study sites.
....................................................................................................................................................... 45
Table 2-10. Error matrices for grouped water, wetland, and upland classes over each study area.
Numbers denote image objects (not individual pixels)................................................................. 45
Table 3-1. Summary of satellite imagery acquired over study sites and temporal periods
examined in this chapter ............................................................................................................... 65
Table 3-2. List of biophysical variables measured over presence and pseudo-absence points at
the park site (Algonquin Provincial Park), and the agricultural site (Brant County study) during
the spring and summer seasons. .................................................................................................... 72
Table 3-3. Summary of significant biophysical variables identified through a t-test comparison
of means between biophysical measurements at observed turtle presence points and random
pseudo-absence points (random values in brackets). Based on 70±5 total sample points for each
variable at each site and each season. ........................................................................................... 73
Table 3-4. Summary of landscape and topographic derived variables used as model inputs ...... 78
Table 3-5. Summary of regression models developed from field-measured biophysical
parameters and satellite-derived data for use in mapping target variables ................................... 81

xi
Table 3-6. Accuracy assessment of regression models developed for biophysical variable
estimation #add units to RMSE .................................................................................................... 81
Table 3-7. Comparison of model test statistics for the park study site (Algonquin Provincial
Park) .............................................................................................................................................. 82
Table 3-8. Comparison of response variables included in final models of habitat selection
developed for Blanding’s turtles of the park study site (Algonquin Provincial Park) in Ontario,
Canada (*p < 0.01). ....................................................................................................................... 83
Table 3-9. Response variables included in final BRT models of seasonal habitat selection for
Blanding’s turtles of the agricultural study site (Brant County), Ontario, Canada. ...................... 85
Table 3-10. Map accuracy statistics based upon all telemetry (presence) data partitioned by
season and overlaid against binary BRT maps set with threshold value of 0.6. Map accuracy
value represents the estimated probability of occurrence of Blanding’s turtles. .......................... 91
Table 4-1. Summary of habitat patch, LCPs and overall landscape indices for the spring and late
summer connectivity models († p < 0.05) ................................................................................... 118

xii
List of Figures
Figure 1-1. Examples of Chelonian status worldwide depicting (a) the critically endangered
Leatherback sea turtle (Dermochelys coriacea), (b) the critically endangered Ploughshare
tortoise (Astrochelys yniphora) from Madagascar, (c) turtles supplying the food market in Asia,
and (d) Lonesome George, the last of the now extinct Pinta Island Galápagos tortoise
(Chelondoidis nigra abingdonii) on display at the American Museum of Natural History. Images
licensed under CC 2.0 via Wikimedia Commons [(a) Tinglar, (b) Hans Hillewaert, (c) Allison
Meier, (d) Vmenkov]. ..................................................................................................................... 2
Figure 1-2. Overview of thesis structure and process demonstrating source data, research
objectives by chapter, and final outcomes (products). .................................................................... 7
Figure 2-1. Study areas located in Ontario (a) Algonquin Provincial Park relatively undisturbed
site, (b) Brant County agricultural site, and (c) east Toronto urban site. Images displayed in false
colour (RGB=NIR-Red-Green). ................................................................................................... 19
Figure 2-2. Process workflow for segmentation and classification of wetland landscapes ......... 20
Figure 2-3. Subset of input layers from the urban site of eastern Toronto showing the (a) digital
elevation model (a), standard deviation texture layer (b), and NDVI layer (c). ........................... 24
Figure 2-4. Multi-scale segmentation process used to segment images at three levels, using a
hierarchical parent-child relationship between wetlands and within wetland components at the
medium (level 2) and fine (level 1) scale. ..................................................................................... 27
Figure 2-5. Example of reference data used in sample selection. (a) Algonquin park site
electronic Forest Resource Inventory (eFRI) imagery (OMNR, 2005) and wetland thematic layer
(pink), and (b) subset – note reference thematic layer does not capture all wetlands in the area.
(b) Brant county agricultural site South Western Ontario Orthoimagery Project (SWOOP, 2005)
and reference wetland thematic layer (pink) from the Grand River Conservation Authority
(GRCA) downloaded from the Grand River Information Network (GRIN). ............................... 32
Figure 2-6. Example of object sample selection for accuracy assessment of the park site
(Algonquin Provincial Park) land cover map. .............................................................................. 33
Figure 2-7. Quantitative evaluation of selected scale parameter with the modified ED3 algorithm
at the coarse (diamond), medium (square), and fine (triangle) levels for the (a) Algonquin park
site, (b) Brant county agricultural site and (c) east Toronto urban site. Hollow circles denote the
selected scale value through visual assessment. ........................................................................... 36
Figure 2-8. Comparison of coarse level segmentation results over the Brant County agricultural
scene (a) with subset shown in red square and (b). Results of segmentation at scale 200 using all
seven input layers shown in (c), and at the same scale 200 with the NDVI layer excluded in (d).
White arrows in (d) show locations of over-segmentation that do not correspond with crop field
boundaries. .................................................................................................................................... 37

xiii
Figure 2-9. Comparison of medium level segmentation results over the Algonquin park scene (a)
with subset a wetland complex shown in the red square and (b). Results of segmentation at scale
40 using all seven input layers (c), and at the same scale 40 with the DEM layer excluded (d).
White arrow in (c) shows improved segmentation of a wetland boundary (to the right of the
indicated line) with the inclusion of the DEM layer. .................................................................... 38
Figure 2-10. Comparison of fine level segmentation results over the east Toronto urban scene (a)
and with subset of a marsh complex shown in the red square and (b). Results of segmentation at
scale 15 using all seven input layers (c), and at the same scale 15 with the texture layer excluded
(d). Note the significant over-segmentation of the texture-excluded image in (d). ...................... 39
Figure 2-11. Sample view of wetlands enclosed by object boundaries created by the FNEA
multiresolution segmentation algorithm (yellow), and its corresponding reference boundary
(white) showing improved delineation of wetland boundaries (a), under segmentation (b), better
detection of within wetland components (c, d); and examples of over segmentation, particularly
of treed wetlands (e, f). Wetlands in the top row are from the natural park site, middle row
wetlands are from the rural site, and bottom row wetlands are from the urban site. Reference
polygons were provided by the OMNR (park site: a, b), Grand River Conservation Authority
(agricultural site: c, d), and the Toronto Region Conservation Authority (urban site: e, f). ........ 40
Figure 2-12. Comparison of mean object layer values providing the best separation between
wetlands and all other classes at each study site. Y-axis shows number of times a layer provided
the best separation distance between classes, normalized out of 1. Average values are
standardized across total number of land cover classes at each site. ............................................ 46
Figure 2-13. Classification results showing original satellite image (a, d, g) (RGB: NIR-Red-
Green), final classified map (b, e, h) with subsets in the red polygons expanded in (c, f, i) over
the Algonquin Park natural site (first row), the Brant county agricultural site (middle row), and
the east Toronto urban site (bottom row). ..................................................................................... 47
Figure 3-1. Study regions in a (a) relatively undisturbed park landscape in Algonquin Provincial
Park, and (b) a fragmented agricultural landscape in Brant County. Images acquired from (a)
GeoEye1 on May 25, 2013 and (b) WorldView2 on April 9, 2012. ............................................. 63
Figure 3-2. Seasonal change in wetland vegetation and standing water in the park study area
(Algonquin Provincial Park) during the early spring (May; top left), and late summer (August;
top right), and the agricultural (Brant County) study area during the early spring (April; bottom
left), mid-season (June; bottom centre) and late summer (August; bottom right).. ...................... 67
Figure 3-3. Workflow demonstrating source data, extraction of environmental input variables,
and development of final raster layers used in model building. ................................................... 68
Figure 3-4. Sampling design for identification of significant biophysical variables correlated
with turtle presence. A subset of present points (blue circles) are selected from the pool of
temporally partitioned telemetry points (pink circles), and paired with a pseudo-absence point
(yellow circles) constrained to a 90m (± 10m) distance, any direction from the selected presence
point. ............................................................................................................................................. 69

xiv
Figure 3-5. Background points generated across study landscape (park site, spring) and stratified
by dominant landcover type shown as pink circles. Temporally partitioned (spring) telemetry
points show in blue circles. ........................................................................................................... 70
Figure 3-6. Change in wetland composition, vegetation extent, and available standing water
across the spring and late summer periods over the park site. Land cover maps were developed
from high spatial resolution GeoEye1 imagery during the spring (May 2013; top) and late
summer (September 2012; bottom). ............................................................................................. 75
Figure 3-7. Change in wetland composition, vegetation extent, and available standing water
across the spring and late summer periods over the agricultural site (subsets). Land cover maps
were developed from high spatial resolution WorldView2 imagery during the spring (April 2012;
top) and late summer (September 2013; bottom). ........................................................................ 76
Figure 3-8. Comparison of variable influence and contribution as habitat predictors for the park
study site (Algonquin Provincial Park). BRT variables are shown on the left as relative influence
and logistic regression on the right as ROC plots of each contributing variable. Lines curving
towards 1 on the sensitivity y-axis represent variables most capable of accurately detecting turtle
presence (true positives). Lines curving towards 1 on the 1-specificity x-axis represent variables
most capable of detecting turtle absence (true negatives). Diagonal line indicates reference line
for which variable provides no discriminatory power. ................................................................. 84
Figure 3-9. BRT model results over the park study site (Algonquin Provincial Park) and the
agricultural (Brant County) study site, over both spring and late summer seasons. Bars depict the
area under the curve receiver operator characteristic value. Orange line displays model predictive
deviance. ....................................................................................................................................... 86
Figure 3-10. Partial dependence fitted function curves for variables retained in final BRT models
for the park study site (Algonquin Provincial Park), spring model (left) and late summer model
(right). Relative influence values in brackets. Y axes are on a logit scale and centred to have a
zero mean over the data distribution. Graphed lines (or dashes) above 0 on the y-axis indicate
higher selection probability over the range indicated by the x-axis, while functions below 0 on
the y-axis indicate lower selection probability (avoidance) over the range indicated on the x-axis.
....................................................................................................................................................... 88
Figure 3-11. Fitted function curves for predictors retained in final BRT models for agricultural
study site (Brant County) spring model (left) and late summer model (right). Relative influence
values in brackets. Y axes are on a logit scale and centred to have a zero mean over the data
distribution. Graphed lines (or dashes) above 0 on the y-axis indicate higher selection probability
over the range indicated by the x-axis, while functions below 0 on the y-axis indicate lower
selection probability (avoidance) over the range indicated on the x-axis. .................................... 89
Figure 3-12. Predicted potential probability surface for the occurrence of Blanding’s turtle in the
agricultural (Brant County) study area (left) and the park (Algonquin Provincial Park) study area
(right) developed using boosted regression trees. Seven final environmental predictors were used
in each model. Red areas indicate the highest probability of occurrence. .................................... 90
Figure 3-13. Threshold map based on habitat suitability ≥ 0.6 for the occurrence of Blanding’s
turtles in the park study area (Algonquin Provincial Park) during the spring (top) and late

xv
summer (bottom) seasons with a map accuracy of 90.8% and 87.8% respectively. Subset (at
right) show pooled turtle presence locations plotted over binary habitat map to demonstrate
overlap with predicted areas. ........................................................................................................ 92
Figure 3-14. Threshold map based on binary habitat suitability (≥ 0.6) for the occurrence of
Blanding’s turtles in the agricultural (Brant County) study area over the spring (top) and late
summer (bottom) seasons with a map accuracy of 94.1% and 65.5% respectively. Subset (images
on right) show pooled turtle presence locations overlaid with predicted suitable habitat for each
season. White circles indicate areas of suitable habitat which have disappeared in the subsequent
late summer season. ...................................................................................................................... 93
Figure 4-1. Map depicting Blanding’s turtle range in North America, and study site in southern
Ontario. Map image licensed under Creative Commons 3.0. ..................................................... 109
Figure 4-2. Examples of wetland habitat found in the agriculturally-modified landscape
depicting habitat patches bisected by roads (A), isolated wetlands surrounded by farmland (B),
man-made irrigation ponds serving as temporary refuge (C), and natural corridors bisected by
multiple roads (D). Imagery: © Digital Globe 2015, Google Map data 2015. ........................... 110
Figure 4-3. Seasonal landcover maps over the agricultural site developed from multispectral
satellite imagery acquired in the spring (left) by GeoEye1 (April 2012) and late summer (right)
by WorldView2 (September 2013). Images were classified using a multi-scale geographic
object-based image analysis (GEOBIA) approach, and the nearest neighbour classifier. .......... 111
Figure 4-4. Resistance maps developed from expert-based knowledge. Habitat nodes shown in
pink for the early spring (left) and late summer (right). Higher resistance is shown in lighter
colours, and lower resistance in darker colours. ......................................................................... 113
Figure 4-5. Predicted least-cost pathways (dashed lines) connecting spatially shifting seasonal
habitat nodes during the spring (left) and late summer (right) season. Nodes coloured according
to relative contribution to connectivity of the network (more important nodes are red, least
important nodes are blue. Top three nodes with highest dIIC scores (∆ Integral Index of
Connectivity; nodes for which removal would most strongly reduce connectivity) are labelled.
Higher dIIC scores indicate higher importance. ......................................................................... 119
Figure 4-6. Results of circuit-based models showing corridors of highest conductance during the
spring (left) and late summer (right). Areas of higher conductance are shown in red, which
denote predicted corridors for Blanding’s turtles. Boxed regions (a, b, c) show areas of
significant change in conductance between maps. ..................................................................... 122
Figure 4-7. Barrier map depicting intersect points between LCPs and paved roads in the spring
(left) and late summer (right) connectivity models. .................................................................... 123
Figure 4-8. Spring Circuitscape map combined with road network (a) and spring (April-June)
Blanding’s turtle telemetry points (b) showing turtle locations on either side of the road. The
image in (c) depicts the estimated movement pathway for a single adult Blanding’s turtle
demonstrating that turtles must cross roads to access preferred habitat. .................................... 124

xvi
List of Appendices
Figure A1. Continuous % vegetation cover raster map derived from high spatial resolution
GeoEye1 imagery (NDVI) and field-based measurements over the spring Algonquin park
study site (a) and subset in white square and (b). ...................................................................137
Figure A2. Continuous % vegetation cover raster map derived from high spatial resolution
GeoEye1 imagery (NDVI) and field-based measurements over the spring Algonquin park
study site (a) and subset in white square and (b). ...................................................................137
138
Figure A3. Continuous water depth raster map derived from high spatial resolution
GeoEye1-imagery (relative water depth algorithm) and field-based measurements. Late
summer Algonquin Provincial Park study area (left) and subset locations shown in white
squares, and boxes (a) and (b). ................................................................................................138
138
Figure A4. Continuous water depth raster map derived from high spatial resolution
GeoEye1-imagery and field-based measurements. Algonquin Provincial Park study area,
late summer. ............................................................................................................................138
139
Figure A5. Continuous map of percent vegetation cover estimated from high spatial
resolution GeoEye1-derived NDVI over the Brant County agricultural study area during
the spring season. ....................................................................................................................139
Table B1. Sensitivity Analysis on map accuracy of habitat suitability maps set at threshold
values of 0.4 - 0.8 ....................................................................................................................139
Table B2. Expert-based resistance values for the spring and late summer season used in
least-cost and circuit theory models. .......................................................................................140

1
Chapter 1
Introduction
Global Status of Chelonians
Turtles are one of the most distinctive and instantly recognizable of all organisms. They possess
a unique outer shell of dermal bone that has remained relatively unchanged since the Triassic
Period when they first appeared in the fossil record (Pough et al., 1998). Out of this extant order
Chelonia, are maintained some of the most ancient reptiles alive in modern times, and a legacy
worth preserving.
Turtles are surprisingly cosmopolitan in their distribution given their ectothermic physiology,
and they occupy every terrestrial habitat apart from Antarctica and the high Arctic (Böhm et al.,
2013; Lesbarreres et al., 2014). However, with nearly 50% of known species listed as threatened
by the International Union for the Conservation of Nature (IUCN; www.iucnredlist.org), turtles
represent one of the most highly threatened groups of vertebrates.
The most cosmopolitan and wide-ranging groups is the marine turtles; inhabitants of the vast
Atlantic, Pacific, and Indian Oceans as well as the Mediterranean Sea. Of the seven species in
existence today, six have been designated as endangered or critically endangered, with the
remaining species absent from this listing only due to a lack of information on population status
(IUCN: www.iucnredlist.org). All major threats to marine turtles originate from human actions
such as fisheries by-catch, global warming, coastal development, and pollution. For critically
endangered species such as the Leatherback marine turtle (Dermochelys coriacea), extinction is
expected within the next eighty years or three generations if effective action is not taken (Figure
1-1a). In other regions of the world terrestrial turtles fare no better, and have also experienced
widespread decline as a result of anthropogenic threats. Ploughshare tortoises (Astrochelys
yniphora) of Madagascar are under such intense pressure from habitat loss, invasive species, and
illegal collection from the pet trade that poaching levels as low as three animals every two years
corresponds to a twenty-five percent population decline over one generation (Leuteritz &
Pedrono, 2014; Figure 1-1b). The consumption of turtles for food, exceeds any possible
sustainable levels, and extinction in the wild can be expected within the next decade for many of

2
these long-lived species (Gibbons et al., 2000; Figure 1-1c). In another part of the world, the
process of extinction occurred inevitably and in plain view as the last male Pinta Island
Galápagos tortoise (Chelondoidis nigra abingdonii) died in June of 2012. Lonesome George
embodied the perils of threatened species, particularly turtles and tortoises, worldwide (Figure 1-
1d). His prolonged path towards inevitable extinction underscores the fate of many other turtle
species as extreme longevity and delayed sexual maturity are traits that do not breed success for
these animals in this rapidly changing world.
Figure 1-1. Examples of Chelonian status worldwide depicting (a) the critically endangered
Leatherback sea turtle (Dermochelys coriacea), (b) the critically endangered Ploughshare
tortoise (Astrochelys yniphora) from Madagascar, (c) turtles supplying the food market in
Asia, and (d) Lonesome George, the last of the now extinct Pinta Island Galápagos tortoise
(Chelondoidis nigra abingdonii) on display at the American Museum of Natural History.
Images licensed under CC 2.0 via Wikimedia Commons [(a) Tinglar, (b) Hans Hillewaert,
(c) Allison Meier, (d) Vmenkov].

3
Due to this discordant relationship between Chelonian life history, and generally short-sighted
anthropogenic activities, impacts of current threats will have pronounced effects on turtle
populations long before demographic effects are detectable.
The global decline of the approximately 300 described turtle species can be linked almost
exclusively to anthropogenic activities (Lesbarreres et al., 2014; Gibbons et al., 2000), while data
deficient species suffer from a lack of basic knowledge on their distributions, and their spatial
and temporal dynamics (Lesbarreres et al., 2014). This is especially true of Canadian reptiles and
amphibians which reach their northern range limits here, and for which information on existing
populations is sorely needed to avoid species loss or decline before spatial distribution and
geographic variation is even known (the ‘Wallacean shortfall’) (Richardson and Whittaker,
2010). Along with amphibians, reptiles have the highest proportion of threatened and data
deficient species globally (Baillie et al., 2010), thus better methods of assessing species status
would contribute greatly towards effective management strategies.
In this dissertation I explore an approach that directs Earth-orbiting satellite remote sensing
technology towards a landscape level analyses of seasonal land cover heterogeneity, habitat, and
connectivity of a threatened freshwater turtle species. The Blanding’s turtle (Emydoidea
blandingii) is endemic to North America, with one of the most restricted ranges of all freshwater
turtles on this continent (Herman et al., 1995). Blanding’s turtles are designated as at-risk across
17 of the 18 jurisdictions that encompass its range in the United States and Canada (NatureServe,
2010) due primarily to habitat loss, road mortality, and illegal collection for the pet trade
(Congdon et al., 2008). The application-based objective of this work is to provide conservation
practitioners with a sound method of obtaining population estimates, to support the identification
and protection of remaining habitat, and to provide information on the landscape level needs of
freshwater turtle species living in highly altered environments. Towards this goal, I have
collaborated with research partners from the Toronto Zoo, Parks Canada, the Ontario Ministry of
Natural Resources, and the Toronto Region Conservation Authority. Results of this work will be
provided to all partners and disseminated in a manner that will address direct conservation
actions and long-term planning. The overall higher order aim is to promote a remote sensing
approach to biodiversity conservation that fully utilizes the spatio-temporal, and multispectral
information of satellite imagery, and to further the knowledge in the arena of conservation
remote sensing.

4
Remote Sensing and Biodiversity
Remote sensing (RS) is a discipline concerned primarily with deriving information from Earth’s
surface for the broad purpose of studying the human dimensions of global environmental change.
Remote sensing is broadly defined as the art and science of obtaining information about an
object or phenomenon without having any direct contact with that object or phenomenon
(Campbell, 2002). In today’s technological world, this approach to obtaining information is a
logical move towards remotely connecting researchers with inaccessible regions through a far-
reaching synoptic view. Environmental RS applications are as diverse as the technology upon
which they are built, and include the mapping of net primary productivity across the Canadian
landmass (Liu et al., 2002), combatting wildfires in the tropics (Eva & Lambin, 2000),
forecasting natural disasters (Joyce et al., 2009), assessing water quality (Ritchie et al., 2003),
and mapping oil spills (Brekke & Solberg, 2005).
In the context of this thesis I was most interested in the use of remote sensing for the
conservation of threatened species, an association that has been eagerly explored since the first
satellite imagery became available in the early 1970s. The availability of such far-ranging
datasets resulted in a dramatic increase in both the scope and amount of plant and animal-related
studies (Rushton, Merod, & Kerby, 2004). De Wulf and Goossens (1988) used early 80 m
Landsat MSS imagery to map the fragmented habitat of the Giant Panda at a time when digital
image processing software was rarely justified for investment, resulting in basic visual
interpretation as the primary means of image analysis. Other early studies further utilised this
new resource towards analysing alligator habitat in alluvial floodplains (Zhujian et al., 1985),
assessing the utility of RS data for managing migratory waterfowl habitat (Colwell et al., 1978),
and delineating broad vegetation patterns related to caribou habitat in the Northwest Territories
(Thompson, Klassen and Cihlar, 1980). The appearance of RS data provided the opportunity to
obtain ecologically relevant spatial and temporal data across a broader scale compared with
traditional field-based methods. This allowed researchers to address fundamental questions about
why organisms are found where they are and more importantly, where limited conservation
funds should be invested (Turner et al., 2003).
While direct observation of individual organisms via RS imagery is possible, an indirect
approach employing environmental parameters as proxies for species presence, has been

5
considerably more popular (Turner et al., 2003). Successes in habitat studies based on this
approach have been achieved with wide-ranging mobile species such as grizzly bears (Linke et
al., 2005), ungulates (Leimgruber et al., 2001), and birds (Osborne et al., 2001; Melles et al.,
2001; Guo et al., 2009). However, less work has been conducted on smaller, cryptic species
which utilize a small home range, such as reptiles and amphibians.
Not all species exhibit characteristics that allow analysis at broad regional scales and there is no
one universal ecological scale that can be applied across all species (Elith and Leathwick, 2009),
but this does not mean that smaller species should be excluded from remote sensing studies. In
fact, the availability of remote sensing data across a range of spatial scales suggests that an
appropriate resolution can be found to match the needs of most animals including turtles.
Fortunately, continuing advances in satellite technology have resulted in improved sensors that
may further widen the scope of species and habitats that can be studied.
Wetlands and Freshwater Turtles
An estimated 40% of the value of global ecosystem services is provided by wetlands (Zedler,
2003), even though they cover only about 4 to 6% of Earths’ terrestrial surface (Mitsch &
Gosselink, 1993). Globally, wetlands cover an estimated 5.3 to 12.8 million km2, and an
estimated 14% of the land area of Canada (Environment Canada, 2010). Yet despite their
obvious importance to ecosystem resilience and benefits to society, more than 50% of the
world’s wetlands have already been lost with little sign of abatement (Verhoeven & Setter, 2010;
Zedler & Kercher, 2005). Humans are the dominant agents of wetland loss and degradation, and
our relationship with these ecosystems is complex. Quantitative estimates of wetland loss include
more than half of peatlands, depressional wetlands, riparian zones, lake littoral zones, and
floodplains, primarily through conversion to agricultural uses (Verhoeven & Setter, 2010).
Meanwhile, many remaining wetlands are not pristine, and are subjected to hydrological
modifications including damming and pumping that alter the natural timing of water fluctuations
responsible for the diversity of vegetation communities and habitat types found in wetlands
(Brock et al., 1999). Conversely, as landscapes become sufficiently developed to be considered
as urban centres, the value of wetlands to residents increases (Boyer & Polasky, 2004), and may
result in wetland restoration activities where formerly wetlands had already existed but were
removed (Ehrenfeld, 2000).

6
It is across this gradient of human-constructed landscape heterogeneity where many wetlands,
and wetland-associated species persist. The high rate of biological productivity of wetlands,
along with strong natural selection pressures connected with these diverse aquatic environments,
have produced many species of both plants and animals that are not found in other habitats
(Gibbs, 1993). Freshwater turtles are completely dependent on aquatic habitats, which makes
them particularly sensitive to changes in wetland hydroperiod, productivity, size and turbidity
(Bodie et al., 2000). Blanding’s turtles inhabit all wetland types containing shallow open water
and abundant vegetation, while generally avoiding terrestrial uplands and fast-flowing water
features (Edge et al., 2010; Paterson et al., 2014; Ross et al., 1990), except during nesting
migrations when uplands are used extensively by gravid females searching for terrestrial nesting
sites (Congdon et al., 2011).
On a microhabitat scale, Blanding’s turtles are often found in close association with emergent
and floating aquatic vegetation (Hamernick, 2000; Millar & Blouin-Demers, 2011), submergent
vegetation (Edge et al., 2010), cold waters and bog mats (Millar & Blouin-Demers, 2011),
floating logs (Barker & King, 2012), and permanent pools (Joyal, McCollough, & Hunter, 2001).
Soft organic substrates and an abundance of sedge tussocks and muskrat mounds for basking are
also preferred (Pappas & Brecke, 2009). Non-natural disturbances to water regimes such as
draining for agriculture alter both the total amount and character of available wetland habitat
(Brock et al., 1999). Furthermore, small and ephemeral wetlands represent critical habitat that
support activities such as foraging (Congdon et al., 2011), and refuge (Grgurovic and Sievert,
2005). Consequently, the loss of these small ecosystems has been found to result in an elevated
extinction risk for many wetland-dependent species, suggesting that their role in the dynamics of
metapopulation stability is greater than their modest area might imply (Gibbs, 1993).
In this dissertation, I was interested in examining wetlands across landscapes of varying
heterogeneity, through a lens of remote sensing and freshwater turtle needs. In the context of
remote sensing, delineating these small (< 0.2 ha) and ephemeral wetlands represents a key
challenge (Ozesmi and Bauer, 2002) towards identifying relevant habitat and landscape features
of import to turtles. Meanwhile the turtles themselves most certainly exhibit a complex
relationship with their surroundings which requires a comprehensive examination of both biotic
and abiotic drivers of habitat selection.

7
Thesis Structure
This thesis is comprised of three independent research chapters which each build upon results
obtained in the preceding study. Research was conducted to improve our understanding of the
habitat needs of threatened freshwater turtles, and to forge a connection between these needs and
the data available in remotely sensed imagery. Ultimately, I was interested in understanding the
natural and anthropogenic processes that affect Blanding’s turtle persistence across typical
landscapes found worldwide. As current research on predictive models of species occupancy do
not often consider the temporal nature of species needs, nor fully exploit the temporal and
spectral information of remote sensing imagery, the main objective of this research was:
To determine if the spatio-temporal aspects of remote sensing imagery could be
used to predict a previously uninvestigated dimension of habitat needs for an
imperilled freshwater turtle species.
Specific hypotheses are described in the following chapter sections and summarized graphically
in Figure 1-2.
Figure 1-2. Overview of thesis structure and process demonstrating source data,
research objectives by chapter, and final outcomes (products).

8
Terminology regarding the practice of predicting where a species may be found, can vary
between disciplines and individual studies. Herein, the terms habitat suitability, species
occupancy, and species distribution modelling are taken to be synonymous with the process of
predicting species presence based upon a suite of environmental variables. A general conclusion
is provided at the end of this dissertation to synthesize overall findings, and discuss future
directions.
1.4.1 Chapter Two: An object-based approach to delineate wetlands across landscapes of varied disturbance with high spatial resolution satellite imagery
Land use and land cover information represents a basic unit of information necessary for
predicting species occupancy (Kerr & Ostrovsky, 2003). The object-based approach has been
used extensively in image analysis since the start of the 21st century with hundreds of studies
conducted on this topic (Blaschke, 2010). Meanwhile wetlands as a target ecosystem have been
studied using all major satellite systems and a variety of classification methods (Ozesmi and
Bauer, 2002). Notable studies include 1) the large-scale mapping of aquatic vegetation and
habitat features across the Great Lakes shoreline in Ontario, Canada using IKONOS data with an
overall accuracy of 90% (Wei & Chow-Fraser, 2007); 2) a multi-temporal SPOT-5 classification
tree approach to monitoring aquatic marsh vegetation in southern France using a variety of
vegetation indices with accuracies greater than 80% (Davranche et al, 2010); 3) using the
GEOBIA (geographic object-based image analysis) approach, Grenier et al (2007) mapped
wetlands in the context of the Canadian Wetland Inventory (CWI) using a combination of
RADARSAT-1 and Landsat ETM images in Quebec, Canada with global accuracy values
between 67-80%, and 4) Dingle-Roberson and King (2014) mapped wetlands in the context of
the Ontario Wetland Evaluation System (OWES) using multi-temporal WorldView2, Landsat-5,
and RADARSAT-2 data. My study differs from previous work in that a primary objective was to
develop a wetland classification approach that was robust across landscapes of varied
heterogeneity due to human disturbance, and to further investigate the effect of this variation on
wetland classification accuracy.
In this chapter, three landscapes of varying disturbance due to human activities were selected,
including; (i) a relatively undisturbed site in Algonquin Provincial Park, (ii) a fragmented

9
agricultural landscape characteristic of the southern Ontario farming regions in Brant County,
and (iii) an urban landscape consisting of dense urban development (built structures) and isolated
green spaces located in east Toronto which is representative of a typical metropolitan area. In
this chapter I develop a parsimonious method for characterizing landscapes of varying
heterogeneity, with emphasis on accurate wetland delineation. I assert the importance of
monitoring wetlands in all landscape types, and hypothesize that landscape heterogeneity affects
the accuracy of both land cover and wetland classification. I further demonstrate that the
GEOBIA approach is particularly effective for wetland detection and delineation.
1.4.2 Chapter Three: Modelling seasonal wetland habitat suitability for Blanding’s turtles (Emydoidea blandingii) using optical satellite remote sensing imagery
This chapter follows a species-centred approach to modelling Blanding’s turtle occurrence based
on remote sensing derived environmental predictors. Data availability is often a constraint in
building models of species’ distribution, particularly for large-scale studies (Osborne et al,
2001), thus many studies are limited to establishing models from available data rather than
ecologically and biologically relevant data. To address this knowledge gap, some studies have
employed novel methods of extracting relevant spatial information from remote sensing imagery.
For example Jeganathan et al (2004) used all Landsat 7 ETM bands and NDVI (normalised
difference vegetation index) to correlate environmental variables around tracking strips for
Jerdon’s courser (Rhinoptilus bitorquatus) to estimate habitat suitability across a wildlife reserve
in India. Osborne et al (2001) used 12-month AVHRR data to calculate monthly NDVI which
was used alongside other inputs to develop a province-wide species distribution map for great
bustards (Otis tarda) in Madrid, Spain. In regards to Blanding’s turtles, two notable studies have
sought to map habitat based upon either single-date aerial imagery, or a combination of available
spatial (GIS) data. Millar and Blouin-Demers (2012) examined the effect of background data
selection on building a province-wide species distribution model for Blanding’s turtles in Ontario
using a provincial land cover product, a digital elevation model (DEM), a provincial road
network vector layer, and derivative layers derived from each. Receiver Operating Characteristic
(ROC) results in the study ranged from 0.73 to 0.91 based on boosted regression tree and Maxent
models. Barker and King (2012) used single-date 20 cm aerial orthophotographs to map wetlands

10
and within wetland habitat features believed to be correlated with habitat selection for
Blanding’s turtles, with an accuracy > 80%.
Building on these previous studies, this chapter takes a landscape-scale approach aimed at
providing habitat information relevant to informing ground-level conservation action. Unlike the
previous studies, I derive relevant environmental predictors from remotely sensed data, and
incorporate a multi-temporal perspective which does not assume the static environment of
traditional habitat models. I further identify relevant biophysical variables associated with habitat
selection of Blanding’s turtles through field surveys and radio-telemetry information.
Furthermore, this study focuses on two different landscapes (the park site and agricultural site)
across two seasons in order to capture the intra-annual variation of wetland habitat and the
heterogeneity of different landscapes. Following a species-centred approach to habitat modelling,
I compile a suite of relevant environmental predictors derived from remote sensing imagery and
predict the probability of occurrence across the two landscapes using a boosted regression tree
approach.
I hypothesize that preferred habitat shifts temporally and spatially as a result of (i) fluctuating
wetland habitat, and (ii) changing behavioural and physiological needs of Blanding’s turtles.
From a methodological standpoint, I further hypothesize that meaningful environmental
variables derived from remote sensing imagery, can improve the realism and precision of
predictive models.
1.4.3 Chapter Four: Estimating seasonal landscape connectivity for Blanding’s turtles in a fragmented agricultural landscape
This chapter retains the temporal dimension, but focuses on the agricultural study site as a model
for a fragmented landscape. Here, I employ multiple measures of connectivity to describe the
movement potential of Blanding’s turtles within a shifting mosaic of land use that includes
actively managed crop fields, residential areas, and a moderately dense road network. I
hypothesize that connectivity is a construct of physiological and behavioural needs which change
temporally along with available habitat. At the time of this study, to my knowledge no previous
work has been conducted on spatial modelling of landscape connectivity for Blanding’s turtles.
Validation of connectivity models can be challenging as empirical data on species movement is
generally difficult to acquire, and genetic validation methods are reserved for species with a

11
relatively fast generation time, and where multiple populations across broader scales are the
focus of the study.
Statement of research collaboration and manuscript submission
I am the primary author of this thesis and I developed the experimental design, carried out field
data collection and data analysis, and established collaborative agreements with research
partners. Any errors and omissions in this work are my own. Chapter Two has been submitted to
the International Society of Photogrammetry and Remote Sensing (ISPRS) and is currently under
review. Co-authors of this chapter are Dr. Yuhong He (PhD supervisor) and Dr. Qihao Weng
(Centre for Urban and Environmental Change, Indiana State University, IN) who provided
advice on methodology, structure of results, and manuscript construction. The success of Chapter
Three depended heavily on the Blanding’s turtle telemetry data shared by the Toronto Zoo (Bob
Johnson, Curator of Reptiles and Amphibians) as well as Christopher Edge and James Paterson
of Laurentian University, Sudbury, Ontario (Supervisor, Dr. Jackie Litzgus). Chapter Four was
developed with the guidance of Bob Johnson, Julia Phillips, and Brennan Caverhill from the
Toronto Zoo who provided expert advice on the behaviour and ecology of Blanding’s turtles and
who provided the landscape resistance values used in connectivity modelling. Dr. Marie-Josée
Fortin provided invaluable advice on the selection of modelling approaches for Chapters Three
and Four, and my supervisor Dr. Yuhong He has been pivotal in all aspects of this research.
References
Barker, R., & King, D. J. (2012). Blanding’s turtle (Emydoidea blandingii) potential habitat
mapping using aerial orthophotographic imagery and object based classification. Remote
Sensing, 4(1), 194–219.
Blaschke, T. (2010). Object based image analysis for remote sensing. ISPRS Journal of
Photogrammetry and Remote Sensing, 65(1), 2–16.
Bodie, J. R., Semlitsch, R. D., & Renken, R. B. (2000). Diversity and structure of turtle
assemblages: associations with wetland characters across a floodplain landscape.
Ecography, 23(4), 444-456.
Böhm, M., Collen, B., Baillie, J.E.M., et al., 2013. The conservation status of the world’s
reptiles. Biological Conservation, 157, 372–385.
Brock, M.A., Smith, R.G.B., and Jarman, P.J. (1999) Drain it, dam it: alteration of water regime
in shallow wetlands on the New England Tableland of New South Wales, Australia.
Wetlands Ecology and Management, 7, 37-46.

12
Brekke, C., & Solberg, A. H. (2005). Oil spill detection by satellite remote sensing. Remote
Sensing of Environment, 95(1), 1-13.
Campbell, J. B. (2002). Introduction to remote sensing. CRC Press, New York.
Colwell, J.E., Gilmer, D.S., Work, E.A. Jr., Rebel, D.L., and Roller, N.E.G. (1978) Use of
Landsat data to assess waterfowl habitat quality. Technical Report, Environmental
Research Institute of Michigan, Ann Arbor, Michigan, 83 pp.
Congdon, J. D., Kinney, O. M., & Nagle, R. D. (2011). Spatial ecology and core-area protection
of Blanding’s Turtle (Emydoidea blandingii). Canadian Journal of Zoology, 89(11),
1098–1106.
Davranche, A., Lefebvre, G., & Poulin, B. (2010). Wetland monitoring using classification trees
and SPOT-5 seasonal time series. Remote Sensing of Environment, 114, 552–562.
De Wulf, R.R., Goossens, R.E., MacKinnon, J.R., and Wu, S.C. (1988) Remote sensing for
wildlife management: Giant panda habitat mapping from LANDSAT MSS images.
Geocarto International, 3(1), 41-50.
Dingle-Robertson, L., & King, D. (2014). Evaluating spatial and seasonal variability of wetlands
in eastern Ontario using remote sensing and GIS. PhD Thesis. University of Carleton.
Edge, C. B., Steinberg, B. D., Brooks, R. J., & Litzgus, J. D. (2010). Habitat selection by
Blanding’s turtles (Emydoidea blandingii) in a Relatively Pristine Landscape.
Ecoscience, 17(1), 90–99.
Elith, J., & Leathwick, J. R. (2009). Species distribution models: ecological explanation and
prediction across space and time. Annual Review of Ecology, Evolution, and Systematics,
40(1), 677.
Eva, H., & Lambin, E. F. (2000). Fires and land‐cover change in the tropics: a remote sensing
analysis at the landscape scale. Journal of Biogeography, 27(3), 765-776.
Gibbons, J.W., Scott, D.E., Ryan, T.J., Buhlmann, K.A., Tuberville, T.D., Metts, B.S., Greene,
J.L., Mills, T., Leiden, Y., Poppy, S., and Winne, C.T. (2000). The Global Decline of
Reptiles, Déjà Vu Amphibians, Bioscience, 50(8), 653-666.
Gibbs, J.P. (1993). Importance of small wetlands for the persistence of local populatiosn of
wetland-associated animals. Wetlands, 13(1), 25-31.
Grenier, M., Demers, A. M., Labrecque, S., Benoit, M., Fournier, R. a., & Drolet, B. (2007). An
object-based method to map wetland using RADARSAT-1 and Landsat ETM images:
test case on two sites in Quebec, Canada. Canadian Journal of Remote Sensing, 33(1),
S28–S45.
Guo, X., He, Y., and Wilmshurts, J. (2009). Managing Loggerhead Shrike habitat using remote
sensing products. ASPRS 2009 Annual Conference, Baltimore, Maryland.
Hamernick, M. (2000). Home ranges and habitat selection of Blanding’s Turtles (Emydoidea
blandingii) at the Weaver Dunes , Minnesota. Chelonian Conservation and Biology, 3(4),
557–568.
Huang, Z., Lin, H., and Zhang, S. (1985) An analysis of the remote sensing image of the Chinese
alligator’s habitat. Oceanologia Et Limnologia Sinica, 16, 35-42.

13
Jeganathan, P., Green, R. E., Norris, K., Vogiatzakis, I. N., Bartsch, A., Wotton, S. R., …
Rahmani, A. R. (2004). Modelling habitat selection and distribution of the critically
endangered Jerdon’s courser Rhinoptilus bitorquatus in scrub jungle: An application of a
new tracking method. Journal of Applied Ecology, 41(2), 224–237.
Joyal, L. a., McCollough, M., & Hunter, M. L. (2001). Landscape Ecology Approaches to
Wetland Species Conservation: a Case Study of Two Turtle Species in Southern Maine.
Conservation Biology, 15(6), 1755–1762.
Joyce, K. E., Belliss, S. E., Samsonov, S. V., McNeill, S. J., and Glassey, P. J. (2009). A review
of the status of satellite remote sensing and image processing techniques for mapping
natural hazards and disasters. Progress in Physical Geography, 33(2), 1-25.
Kerr, J.T., and Ostrovsky, M. (2003) From space to species: ecological applications for remote
sensing. Trends in Ecology and Evolution, 18(6), 299-305
Leimgruber, P., McShea, W. J., Brookes, C. J., Bolor-Erdene, L., Wemmer, C., & Larson, C.
(2001). Spatial patterns in relative primary productivity and gazelle migration in the
Eastern Steppes of Mongolia. Biological Conservation, 102(2), 205-212.
Leuteritz, T. & Pedrono, M. (2008). Astrochelys yniphora. The IUCN Red List of Threatened
Species. Madagascar Tortoise and Freshwater Turtle Red List Workshop, Version
2014.3. <www.iucnredlist.org>. Downloaded on 27 April 2015.
Lesbarrères, D., Ashpole, S. L., Bishop, C. A., Blouin-Demers, G., Brooks, R. J., Echaubard,
P.,& Lougheed, S. C. (2014). Conservation of herpetofauna in northern landscapes:
Threats and challenges from a Canadian perspective. Biological Conservation, 170, 48-
55.
Linke, J., Franklin, S. E., Huettmann, F., & Stenhouse, G. B. (2005). Seismic cutlines, changing
landscape metrics and grizzly bear landscape use in Alberta. Landscape Ecology, 20(7),
811-826.
Lomolino, M.V., Riddle, B.R., Whittaker, R.J., and Brown, J.H. (2010) Biogeography, fourth ed.
Sinauer Associates, Sunderland, MS.
Liu, J., Chen, J.M., Cihlar, J. and Chen, W. (2002) Net primary productivity mapped for Canada
at 1-km resolution. Global Ecology and Biogeography, 11(2), 115-129.
Melles, S. J., Fortin, M.-J., Lindsay, K., & Badzinski, D. (2011). Expanding northward:
influence of climate change, forest connectivity, and population processes on a threatened
species’ range shift. Global Change Biology, 17(1), 17-31.
Millar, C. S., & Blouin-Demers, G. (2011). Spatial Ecology and Seasonal Activity of Blanding’s
Turtles (Emydoidea blandingii) in Ontario, Canada. Journal of Herpetology, 45(3), 370–
378.
Mitsch, W. J., & Gosselink, J. G. (1993). Wetlands. Wiley & Sons, Hoboken, New Jersey.
Osborne, P. E., Alonso, J. C., & Bryant, R. G. (2001). Modelling landscape‐scale habitat use
using GIS and remote sensing: a case study with great bustards. Journal of Applied
Ecology, 38(2), 458-471.
Ozesmi, S., & Bauer, M. (2002). Satellite remote sensing of wetlands. Wetlands Ecology and
Management, 10, 381–402.

14
Pappas, M. J., & Brecke, B. J. (2009). Habitat Selection of Juvenile Blanding’s Turtles ,
Emydoidea blandingii. Journal of Herpetology, 26(2), 233–234.
Paterson, J. E., Steinberg, B. D., & Litzgus, J. D. (2014). Effects of body size, habitat selection
and exposure on hatchling turtle survival. Journal of Zoology, 294(4), 278–285.
Pough, F.H., Andrews, R.M., Cadle, J.E., Crump, M.L., Savitzky, A.H., and Well, K.D. (1998).
Herpetology. Prentice-Hall, Inc., Upper Saddle River, New Jersey.
Richardson, D. M., & Whittaker, R. J. (2010). Conservation biogeography–foundations, concepts
and challenges. Diversity and Distributions, 16(3), 313-320.
Ritchie, J. C., Zimba, P. V, & Everitt, J. H. (2003). Remote sensing techniques to assess water
quality. Photogrammetric Engineering & Remote Sensing, 69(6), 695–704.
Ross, D. A., Anderson, R. K., Journal, S., & Mar, N. (1990). Habitat use , movements , and
nesting of Emydoidea blandingii in Central Wisconsin. Journal of Herpetology, 24(1), 6–
12.
Thompson, D.C., Klassen, G.H., and Cihlar, J. (1980) Caribou habitat mapping in the southern
district of Keewatin, NWT: An application of digital Landsat data. Journal of Applied
Ecology, 17, 125-138.
Turner, W., Spector, S., Gardiner, N., Fladeland, M., Sterling, E., & Steininger, M. (2003).
Remote sensing for biodiversity science and conservation. Trends in Ecology &
Evolution, 18(6), 306-314.
Verhoeven, J.T.A., and Setter, T.L. (2010) Agricultural use of wetlands: opportunities and
limitations. Annals of Botany, 105, 155-163.
Wei, A., & Chow-Fraser, P. (2007). Use of IKONOS Imagery to Map Coastal Wetlands of
Georgian Bay. Fisheries, 32(4), 164–173.
Zedler, P. H. (2003). Vernal pools and the concept of “isolated wetlands”. Wetlands, 23(3), 597-
607.
Zedler, J.B., and Kercher, S. (2005) Wetland resources: Status, trends, ecosystem services, and
restorability. Annual Review of Environmental Resources, 30, 39-74.

15
Chapter 2
An object-based approach to delineate wetlands across landscapes of varied disturbance with high spatial resolution
satellite imagery
Introduction
Mapping wetlands across natural and human-altered landscapes is important for understanding
their responses to natural and anthropogenic activities, for developing strategies to conserve
wetland biodiversity, and to prioritise areas for restoration or protection. While public perception
of the conservation value of wetlands has increased over the past century (Brock et al., 1999),
wetland loss appears to continue with little abatement and this change requires ongoing
monitoring.
The ability to delineate wetlands and monitor changes in a semi-automated, and ongoing manner
is important to the management of these ecosystems. A viable approach is the use of satellite
remote sensing data, which provides advantages of large area coverage, ongoing data collection,
and improved spatial resolution for wetland detection. While a variety of methods to delineate
wetlands have been used with varying success (Davranche et al., 2010; Hirano et al., 2003;
Schmidt & Skidmore, 2003; Shanmugam et al., 2006), less attention has been given to the
applicability of such methods across different landscapes. Urban and rural landscapes represent
uplands subjected to disturbance related to increased surface heterogeneity, changes to
hydrologic regime, and land cover composition which may affect wetland detection accuracy.
Previous research has demonstrated that wetlands can be detected within upland surroundings,
yet a unified approach to mapping wetlands across landscapes of varying complexity has not
been identified. Further, fewer studies have included the detection of small and ephemeral
wetlands even though pools as small as 0.2 ha represent important, often critical habitat
(Semlitsch & Bodie, 1998). In some areas such as the glaciated prairie pothole region of central
Canada, almost 88% of wetlands are less than 0.4 ha in area (Halabisky, 2011). Coarser 30 m
data such as those from the Landsat series require a minimum of 9 pure pixels (0.81 ha) to
consistently identify a feature (Ozesmi & Bauer, 2002), resulting in many mixed pixels and small

16
wetlands below this threshold being missed (Klemas, 2011; Powers et al., 2011). At the local
scale, protection of small wetlands is vital, particularly for the maintenance of biodiversity
(Gibbs, 1993; Semlitsch & Bodie, 1998), and many wetlands in altered landscapes are
significantly reduced in size from their former coverage. While the current cost associated with
obtaining high spatial resolution satellite data can be high, the cost is still significantly lower
than field surveying or aerial photographs (see Wei and Chow-Fraser, 2007 for a cost
breakdown) and provides the advantage of repeat coverage for monitoring temporal trends and
the addition of data outside of the optical range (e.g., in the near infrared region). Current work
with high spatial resolution sensors has been used to successfully monitor the change in aquatic
vegetation in coastal marshes (Wei & Chow-Fraser, 2007), to discriminate between submerged
and emergent wetland vegetation (Davranche et al., 2010), and to estimate marshland
composition and biomass in riparian marshes (Dillabaugh & King, 2008).
While high resolution data provide the needed spatial resolution to capture smaller wetlands, it
also results in greater within-class spectral variance, making separation of mixed and similar land
cover classes more difficult than with coarser-resolution imagery (Klemas, 2011; Hu and Weng,
2011). To address this increased variance an appropriate classification method must be
employed. In recent decades object based image analysis (OBIA), or geographic object based
image analysis (GEOBIA), has gained much attention as an alternative to traditional pixel-based
methods. The packaging of pixels into discrete objects minimizes the variance (noise)
experienced by high spatial resolution images, allowing the objects, rather than individual pixels
to be classified. Past work has found that the object-based approach is preferred over the pixel-
based approach for classifying urban areas (Myint et al. 2011; Hu and Weng, 2011), mapping
land cover (Whiteside & Ahmad, 2005; Yan, Mas, Maathuis, Xiangmin, & Van Dijk, 2006), and
land cover change (Dingle Robertson & King, 2011). The object-based approach has also been
successfully used in wetland research for classifying macrophyte communities in coastal marsh
habitat (Midwood & Chow-Fraser, 2010; Rokitnicki-Wojcik, Wei, & Chow-Fraser, 2011),
evaluating the structure of patterned peatlands (Dissanska, Bernier, & Payette, 2009), and
mapping multiple classes of wetlands according to the Canadian Wetland Inventory (Grenier et
al., 2007). Fournier et al. (2007) reviewed wetland mapping methods to be applied to the
Canadian Wetlands Inventory program and identified the object-based approach as most
appropriate due to its flexibility and ability to address the spatial heterogeneity of wetlands.

17
Despite past successes in mapping wetland classes and vegetative communities, the majority of
previous research has examined wetlands in isolation from the surrounding landscape. Yet the
ability to delineate wetlands from regions where a previous wetland inventory does not exist, is
important for monitoring trends and mitigating further wetland losses.
Wetland classification approaches have ranged from traditional unsupervised (Sawaya et al.,
2003; (Jensen, Rutchey, Koch, & Narumalani, 1995) and supervised algorithms (Wang, Sousa, &
Gong, 2004; Yu et al., 2006) including fuzzy methods (Benz, Hofmann, Willhauck,
Lingenfelder, & Heynen, 2004; Townsend & Walsh, 2001) and object-based approaches
(Blaschke, 2010; Blaschke et al. 2014) to more complex machine learning algorithms such as
classification tree methods (Midwood & Chow-Fraser, 2010; Wright & Gallant, 2007) including
random forest classification (Corcoran, Knight, & Gallant, 2013) with some complex models
drawing from numerous data layers to discriminate among wetland types (Wright & Gallant,
2007). As a result, it is not surprising that many studies have been devoted entirely to comparing
the utility of these different methods (Dingle Robertson & King, 2011; Duro, Franklin, & Dubé,
2012; Harken & Sugumaran, 2005; Shanmugam et al., 2006) with no general consensus being
reached on a universal methodology. Similarly, the use of ancillary data in improving wetland
mapping accuracy has been demonstrated by the inclusion of LIDAR (Hopkinson et al., 2005)
and RADAR data (Grenier et al., 2007) to characterize vegetation height, hyperspectral data for
discriminating between aquatic plant species (Becker, Lusch, & Qi, 2007; Hirano et al., 2003;
Zomer, Trabucco, & Ustin, 2009), time series image data for wetland boundary and change
detection (Davranche et al., 2010; Johnston & Barson, 1993), and passive microwave data to
map flooded areas (Prigent, Matthews, Aires, & Rossow, 2001).
This paper employs a GEOBIA supervised-classification approach to wetland land cover
mapping across three different landscapes in southern Ontario, Canada using high spatial
resolution WorldView2 and GeoEye1 imagery. The same approach to classifying wetlands is
applied across three landscapes varying in disturbance from human activity representing a semi-
natural park, agricultural, and urban landscape, to determine the robustness of this method across
scenes of varying heterogeneity and composition. While a methodological design is emphasized,
results of this study are intended for use in operational applications to help improve the
management of wetlands in all landscapes.

18
Study Area
Three study sites were selected and categorized as park (semi-natural), agricultural (moderately-
disturbed), and urban (heavily disturbed). As most natural areas have undergone some level of
alteration or disturbance, the park landscape was defined based on criteria adapted from Fahrig et
al. (2011) as areas where (1) most primary production is not consumed by humans either directly
or indirectly, (2) the main species of the cover type has an evolutionary or long-term association
with that area, and (3) the frequency and intensity of anthropogenic disturbances are low relative
to those in agricultural and urban regions. Study sites were further categorized based on
population density with an urban area supporting over 400 people/km2, an agricultural area of
less than 400 people/km2, and a natural site with no permanent human population
(http://www.statcan.gc.ca/subjects-sujets/standard-norme/sgc-cgt/notice-avis/sgc-cgt-06-
eng.htm).
The natural study site was located in the northeast corner of Algonquin Provincial Park (Ontario,
Canada) which represents a protected and relatively undisturbed landscape (Figure 2-1a). The
Park was established in 1893 and encompasses 7,630 km2 including approximately 340 ha of
wetlands of all classes as defined by the Canadian Wetlands Classification System (NWWG,
1997). Logging activity occurs in the study area as well as recreational use by park visitors,
though the study site is located in a less heavily visited section. The agricultural site was situated
in the County of Brant (Ontario, Canada) which sits within the Grand River watershed, located
approximately 130 km west of Toronto, and supporting a population of 35,000 people, or a
population density of 42.3 person per square kilometre (Statistics Canada, 2011). Provincial and
private roads bisect the agriculturally dominated landscape and surround the Oakland Swamp, an
890 ha wetland of provincial significance (Figure 2-1b, outlined in yellow). Several smaller
wetlands of variable size and shape were also distributed throughout the study area. The urban
study site encompassed the eastern portion of Toronto and the adjacent city of Pickering (Figure
2-1c). Toronto is the largest city in Canada and supports a population of 2.79 million people, and
a greater Toronto area (GTA) population of 5.5 million, the latter of which supports a population
density of 945.4 persons per square kilometre (Statistics Canada, 2011). The study site included
the Rouge Urban National Park (Figure 2-1c, outlined in yellow), a federally-governed urban
recreation area covering roughly 6,300 ha that is bounded along its western and eastern border by
dense urban development including roadways that cross over and through the park interior.

19
Pockets of wetlands can be found throughout the study area, including several recently restored
wetlands. This urban park receives thousands of visitors annually and its interior is bisected with
pedestrian and bike pathways.
Figure 2-1. Study areas located in Ontario (a) Algonquin Provincial Park relatively
undisturbed site, (b) Brant County agricultural site, and (c) east Toronto urban site. Images
displayed in false colour (RGB=NIR-Red-Green).
Data and Methods
A multi-scale GEOBIA approach was used to segment images, which were then classified using
a supervised nearest neighbour algorithm (Figure 2-2). Multiple input layers were utilised during

20
image segmentation with both qualitative and quantitative measures used to select and evaluate
the resultant image objects.
Figure 2-2. Process workflow for segmentation and classification of wetland landscapes

21
2.3.1 Satellite Imagery and Preprocessing
High spatial resolution images from WorldView2 and GeoEye1 sensors were acquired over the
study sites (Table 2-1) and cover 40 km2. Both sensors captured image data at the same high
spatial resolution (1.85 m multispectral) and covered the same bandwidths over the blue and
green regions, and similar bandwidths over the red and near infrared regions. All effort was
made to acquire imagery from the same sensor over all study sites, but coverage from high
resolution satellites is rarely complete and imagery from two sensors was required to capture all
three study areas.
Table 2-1. Satellite Image data information
Sites Rouge Park
(urban site)
Algonquin Park
(natural site)
Brant County
(rural site)
Acquisition date 25 July 2012 25 May 2013 9 April 2012
Sensor WorldView2 GeoEye1
Nominal ground
pixel size 1.85 m multispectral
Spectral bandwidths
Blue (450-510nm)
Green (510-580nm)
Red (630-690nm)
Near infrared (770-895nm)
Blue (450-510 nm)
Green (510-580nm)
Red (655-690nm)
Near infrared (780-920nm)
Radiometric
Quantization 16 bits
Each image contained natural segments (unmanaged forests, wetlands, open water), built
segments (paved roads, commercial, residential and urban structures), and altered natural
components (agricultural crops, dirt roads) in varying proportions. All three study areas were
located in southern Ontario (44o00’N 80o00’W) which covers a core area of 126,819 km2. Full
deciduous leaf-on conditions are typically reached by the end of the month of May or beginning
of June. Leaf-off conditions generally occur by late October or early November. The timing of
crop growth is more variable as crop types which are typical to this region (e.g. corn, soy,
tobacco, ginseng, wheat) follow different schedules of planting, growth, and harvest which are
further determined by the timing, configuration, and conditions of planting as well as annual
climate variations (OMAFRA, 2014). Length of the crop growth from time of planting to full

22
maturity or harvest are variable and can range from 25 days (soy) to 149 days (corn) (OMAFRA,
2014).
All multispectral images were radiometrically normalized using an atmospheric correction
method for broad-band visible/NIR imagery (Richter et al. 2006; Richter, 1996) and for thin
cloud contamination across diverse surfaces (Zhang et al. 2002). Atmospheric correction is
generally not needed for classification of single-date images as long as training data and the
image to be classified are on the same relative scale (of corrected or uncorrected) (Song et al.,
2001). Assuming a homogenous horizontal atmosphere, applying radiometric correction has little
effect on classification accuracy (Song et al., 2001), however the correction was applied as
subsequent work (chapter three) relates ground-based measurements to vegetation indices
derived from the satellite imagery, for which atmospheric correction is required. Radiometric
normalization was implemented in PCI Geomatica, (ATCOR3; PCI Geomatica, 2014) though
cloud cover and haze was minimal across all images. This atmoshperic correction approach was
deemed most appropriate for this study as the algorithm was optimized for high spatial resolution
imagery (Richter, 1997), and only required three visible and one near infrared band for
normalization (Richter et al., 2006) which is a common band configuration for many high spatial
resolution Earth-observing satellites (e.g. GeoEye1, SPOT6) and for economical (reduced-band)
options of imagery such as those from WorldView2 which provides data at 8 (full) or 4 (reduced)
bands.
After atmospheric correction, all images were projected to the Universal Transverse Mercator
projection datum (NAD83, UTM Zone 17) and georeferenced to a root mean squared error
(RMSE) of less than 2 pixels using a 1st order polynomial transformation and a nearest neighbour
resampling method, corresponding to less than 4 m ground error. Processed images were clipped
to a 40 km2 boundary using ArcGIS version 10.2 (Environmental Systems Research Institute,
Redlands, CA, USA). The panchromatic layer was not used, as it increased processing time to
unrealistic lengths.
2.3.2 Development of Input Layers
Seven features were used for image segmentation including four multispectral layers (blue,
green, red, and near infrared), a DEM layer, an NDVI (normalized difference vegetation index)

23
layer, and a standard deviation texture layer. A 10-m digital elevation model (DEM) was
acquired from the Ontario Ministry of Natural Resources (Figure 2-3a) which was interpolated
from a DTM (digital terrain model), a contour map, spot height data, and a water virtual flow
map to a ±10 m vertical precision. This dataset was the best available over all three study areas,
and was expected to be useful at the accuracy level provided (±10 m). The DEM for each image
scene was resampled to 2 m to match the resolution of the other input layers. Resampling the
DEM did not provide any additional information but ensured continuity in pixel size across all
input layers and avoided a coarser resolution affecting the boundaries of image objects. Elevation
was included as an input layer because wetlands and water bodies are known to sit
topographically low in the landscape due to their close association with ground water and surface
run-off (Mitsch & Gosselink, 2000). Other elevation-related input layers such as slope and aspect
were originally included, but were discarded as they did not contribute any additional
information.
Texture information refers to the spatial variation in the spectral brightness of a digital image,
and has a high potential for revealing differences between classes in remotely sensed imagery
(Berberoğlu, Curran, Lloyd, & Atkinson, 2007). Texture measures can be derived directly from
satellite imagery, and do not require the acquisition of additional data. For this study a first-order
texture layer was created (Figure 2-3b) based on the standard deviation within a 3 pixel by 3
pixel moving window.
NDVI is a well-established indicator of live green vegetation (Rouse et al., 1974) and was
created from the red and near infrared bands of the multispectral data according to the following
equation:
���� =ρnir − ρred
ρnir + ρred
where (ρ) is the reflectance of the visible (red) and near-infrared (nir) bands of the
electromagnetic spectrum. NDVI values range from -1 to 1, where higher NDVI values indicate
a greater coverage of photosynthetically-active vegetation, while values less than zero typically
do not have any ecological meaning. NDVI has been used to separate water from dry land, and
for delineating wetland boundaries (Ozesmi & Bauer, 2002) (Figure 2-3c). All final image
layers were weighted equally in the multiresolution segmentation process.

24
Figure 2-3. Subset of input layers from the urban site of eastern Toronto showing the (a)
digital elevation model (a), standard deviation texture layer (b), and NDVI layer (c).
2.3.3 Image Segmentation
Segmentation is a key aspect of GEOBIA relating to the ultimate quality of the final
classification (Baatz et al., 2008) and its optimal result is a scene segmented into objects that
reflect real-world features of interest. In the object-oriented approach, both spectral and spatial
(or contextual) parameters are used to define an image object, whereas traditional per-pixel
classifiers treat each individual pixel independently of its neighbours. This study employed the
fractal net evolution approach (FNEA) to segmenting images (Baatz & Schape, 2000) which was

25
implemented through the multiresolution segmentation algorithm in Definiens Developer 7.0
(Munich, Germany; Definiens, 2008, formerly eCognition).
Three key segmentation parameters of scale, colour, and shape control the size, shape and
spectral variation of segmented image objects. Weights of colour and shape sum to 1, while
shape is further divided into smoothness (relating to the smoothness of object edges) and
compactness (relating to the closeness of an object shape with a circle) which sum to 1
(Definiens, 2008). The colour parameter was set to 0.9 to place greater emphasis on pixel values
of input layers, and shape parameters were set to 0.5 each to balance both the compactness and
smoothness of object boundaries equally. The most critical step is the selection of the scale
parameter (unitless) which controls the size of the image objects by sequentially merging pixels
pairwise with the intent of minimising the heterogeneity within (Blaschke & Hay, 2001;
Mallinis, et al., 2008). The scale parameter sets a threshold of homogeneity which determines
how many neighbouring pixels can be merged together to form an image object (Benz et al.,
2004) and is given by the equations:
where h is the heterogeneity for a d-dimensional features space, f is the selected object feature
(equation 1), and h1 and h2 describes the homogeneity of two adjacent regions before the merge,
and after (hm) the merge, with hdiff relating to the change in the object after a virtual merge
whose aim is to reduce heterogeneity with growth (Blaschke & Hay, 2001).
In this paper, we applied a multi-scaled segmentation approach that utilized three levels of scale
parameterization to capture different land cover classes (Figure 2-4). Dominant land cover
classes that covered the majority of the scene were segmented at the coarse level, while
remaining classes were delineated at the medium level. Entire wetlands were segmented and
defined as objects at the mid-range scale, and further segmented at the finest scale level to
delineate components within wetlands and classify these as marsh, swamp, fen or bog. These
smaller (child) objects retain links to their larger (parent) class which employs a true multi-scale
approach through applying vertical constraints in segmentation and classification. Classification

26
for specific land cover classes was thus completed at each scale level, with remaining
unclassified objects undergoing further segmentation, followed by classification. A thematic road
network layer was available for each scene and was used in the segmentation process.
We first employed a qualitative visual approach to select the scale parameter at each level
(coarse, medium, and fine). At the medium and fine segmentation level this ensured that the
optimal scale parameter for wetlands was selected by drawing upon knowledge of the study
areas, and based on the premise that the human eye is best capable of interpreting and
recognizing complex patterns in conjunction with neighbourhood context (Benz et al., 2004;
Myint et al., 2011). This approach is especially fitting for wetlands that can be highly variable in
both size and shape. Scale values ranging from 5 to 250 with an interval of 5 were evaluated for
each image and final scale selection was guided by field knowledge, thematic maps and aerial
imagery.

27
Figure 2-4. Multi-scale segmentation process used to segment images at three levels, using
a hierarchical parent-child relationship between wetlands and within wetland components
at the medium (level 2) and fine (level 1) scale.

28
This selection was then quantitatively assessed using the modified ED3 discrepancy measure of
Yang, He, and Weng (2015) which is based on global geometric and arithmetic relationships
(e.g. over-under segmentation) between hand-digitized reference polygons and corresponding
segments produced by the multiresolution segmentation algorithm. This multi-band scale
parameter evaluation method allows identification of multiple appropriate scale parameters based
on the equation:
where ri is a reference polygon, and I is the number of reference polygons, sj is the corresponding
segment for the reference polygon i, and Ji is the number of its corresponding segments. In this
modified equation, a candidate segment will be labelled as the corresponding segment of a
reference polygon only when the overlapping area is over 50%. Results are normalized between
zero and 0.71, with lower values indicating a higher segmentation quality (Yang et al., 2015).
Multiresolution segmentation results between scale values of 5 to 200 (intervals of 5) were
compared to a set of manually delineated reference polygons at each scale level (coarse, medium,
fine), and for each image. A total of 30 reference polygons per scale level were used in the
analysis. There are multiple quantitative and automated approaches to selecting the scale
parameter including automated parameterisation using the potential of local variance to detect
scale transitions (Drăguţ et al., 2014; Drǎguţ et al., 2010), supervised methods that use various
indices to describe the discrepancy between reference polygons and corresponding image objects
(Clinton et al. , 2010; Liu et al., 2012), and a comparison index using both topological and
geometric object metrics (Moller et al. 2007). However, there is no perfect algorithm that is
appropriate for all images (Munoz et al., 2003) and a certain element of trial, error, and repetition
is inherent to the overall process of scale selection and evaluation.
2.3.4 Classification Approach
A non-parametric nearest neighbour classifier was used to place image objects into defined land
cover classes. This iterative process involved selecting training samples, comparing sample
attributes, and refining training samples until a satisfactory result was achieved. The nearest

29
neighbour classifier is advantageous when image data are composed of spectrally similar classes
that are not well separated using a few features (Definiens, 2008) or when training sample sizes
may be uneven (Myint et al., 2011; Yu et al., 2006). The mean feature values of pixels in each
object (calculated from the input layers), were used to quantify separation distance between
classes following the equation:
where d is the separation distance between feature values of an object (vo) with its nearest
training sample (vs), over the standard deviation of the feature attribute.
The nearest neighbour, or k-NN approach as it is often called, is a simple yet efficient
classification algorithm that has been shown to perform as well as more complicated methods
such as support vector machines (SVM) under constant conditions (Im et al., 2008). There are
many attributes that can be used to train the nearest neighbour classifier, but the contribution of
each varies and constraints such as processing time often dictates that only a few features be
employed. A parsimonious model was developed based upon only the mean object value and
standard deviation for each input layer in order to maintain a realistic processing time and an
efficient model that can be compared across landscapes. A spatially representative sample of
training objects were selected to inform the classifier.
Land cover classes. The final classification scheme (Table 2-2) was based on the land cover and
land use classification system developed by Anderson et al. (1976) and the Canadian Wetland
Classification System (NWWG, 1997). Specifically, study areas were classified into the
following categories: agricultural land, barren land, forested upland, herbaceous upland, urban
matrix, water, and wetland. Wetlands were broadly defined as land that is saturated with water
for a period of time sufficient to promote wetland or aquatic processes resulting in characteristics
such as poorly drained soils, hydrophytic vegetation, and other biological activity adapted to wet
environments (NWWG, 1997). According to the Canadian Wetland Classification System
(NWWG, 1997) wetlands were further classified as marsh, swamp, bog, or fen (Table 2-3). All
wetland classes were found in the park study site, while only marshes and swamps were found in
the agricultural and urban locales.

30
Table 2-2. Land cover class descriptions adapted from Anderson et al., (1976) and the
Canadian wetland classification system (National Wetlands Working Group, 1997).
Class Description
Agricultural Land Land used primarily for production of food and fiber (e.g., Row
crops, bare (idle) fields, shaded crops; groves; orchards)
Barren Land Land of limited ability to support life; less than one-third of the area
has vegetation or other cover (e.g., sands, rocks, thin soil)
Forested Upland Closed canopy deciduous , coniferous, or mixed forests
Herbaceous
Upland
Land where vegetation is dominated by a mix of grasses, grass-like
plants, forbs, shrubs or bush; either naturally-occurring or modified
(e.g. old fields, roadside vegetation, meadows, mixed composition
short vegetation upland)
Urban or Built
Matrix
Areas of intensive use with much of the land covered by man-made
structures (e.g., residential, commercial, industrial, utility, and
transportation sites such as those found in cities, towns, rural
communities and strip developments)
Water All areas that are persistently water-covered (e.g., lakes, reservoirs,
streams, bays, estuaries)
Wetland Bog, fen (or wet meadow), swamp, marsh, shallow open water

31
Table 2-3. Wetland land cover class descriptions according to the Canadian Wetland
Classification System (NWWG, 1997).
Class Description
Bog A peat landform, raised or level with the surrounding terrain and
isolated from runoff and groundwater, receiving water primarily
from precipitation, fog, and snowmelt. Water table sits at or slightly
below the bog surface. Treed or treeless, and usually covered with
Sphagnum spp. and shrubs, or woody remains of shrubs.
Fen A type of peatland which receives both surface and groundwater flow
due to its topographic position which is level with the surface of the
fen (+/- a few centimetres). Vegetation can include graminoids,
bryophytes, shrubs, and also trees (in drier fens).
Marsh A shallow water wetland with water levels that can fluctuate daily,
annually, or seasonally resulting in highly variable hydrology.
Receives water from the surrounding catchment as well as
precipitation. Marsh vegetation is comprised of emergent aquatic
macrophytes such as graminoids (e.g. rushes, reeds, sedges),
floating-leaved species (e.g. lilies) and submergent species (e.g.
water milfoil). Marsh plant communities are seasonal and dynamic,
often shifting with water levels.
Swamp Forested or wooded wetland, dominated by minerotrophic
groundwater and a water table below the ground surface of the
swamp for the majority of the year. Vegetation dominated by
coniferous or deciduous trees or tall shrubs (generally over 30%).
Sample Selection. Training sample objects were selected using aerial photographs, thematic
maps and reference data collected during field campaigns (Figure 2-5). A minimum of 50
training sample objects were chosen for each non-wetland class, with some exceptions for
classes which only covered a small proportion of the scene such as the urban/built class in the
park site. A minimum of 35 samples for wetland classes were selected where possible, though all
wetland types were not present in all study areas. An advantage of the multi-scale approach is the
ability to adequately sample rarer classes such as wetlands by segmenting these landforms into
smaller image objects. Sample image objects for wetlands were grouped into the classes
described in Table 2-3. In some cases, a dominant class such as ‘marsh’ was further separated
into emergent marsh and wet meadow in order to capture the spectral and textural variation in

32
heterogeneous marsh communities. These groups were later merged into one marsh class for
comparison across landscapes. Samples were selected to represent the range of spatial and
spectral variability across each landscape.
Figure 2-5. Example of reference data used in sample selection. (a) Algonquin park site
electronic Forest Resource Inventory (eFRI) imagery (OMNR, 2005) and wetland thematic
layer (pink), and (b) subset – note reference thematic layer does not capture all wetlands in
the area. (b) Brant county agricultural site South Western Ontario Orthoimagery Project
(SWOOP, 2005) and reference wetland thematic layer (pink) from the Grand River
Conservation Authority (GRCA) downloaded from the Grand River Information Network
(GRIN).

33
2.3.5 Accuracy assessment
A minimum of 35 independently selected image objects per class were used for accuracy
assessment. Sample selection was based upon very high resolution (VHR) aerial photographs
over each site, reference thematic maps, and ground truth data collected in June 2011 from each
study area (Figure 2-5). Validation and training samples did not overlap. Accuracy was assessed
based on the error matrix and associated statistics of overall accuracy, kappa statistic, producer’s
accuracy (1 - errors of omission) and user’s accuracy (1 - errors of commission). Object-based
assessment was preferred over pixel-based methods as I was most interested in determining if
wetland boundaries and marsh vegetation communities were accurately classified (Figure 2-6).
With this objective, accuracy was better assessed using individual objects which have a clearly
defined boundary.
Figure 2-6. Example of object sample selection for accuracy assessment of the park site
(Algonquin Provincial Park) land cover map.

34
Results
2.4.1 Multi-scale segmentation
Final scale values selected through visual assessment varied between study areas (Table 2-4).
Dominant land cover classes of mixed forest (park site), crop field (agricultural site), and urban
matrix (urban site) were most accurately delineated at a scale of 125, 200, and 75 respectively. In
general, boundaries were clearly defined with minimal absorption of smaller classes. Similarly,
whole wetland boundaries were mostly well defined and often included greater spatial detail than
reference thematic maps, although specific depiction varied across each landscape. Medium level
scale values of 40, 60, and 50 were selected at the park, agricultural, and urban site, respectively.
Whole wetlands were further segmented at the finest scale level (20 [park], 10 [agricultural], 15
[urban]) to further classify these objects into marsh, swamp, bog, fen, or water. This parent-child
relationship maintained a hierarchical constraint which limited classification of the five wetland
classes to only those objects defined earlier as wetlands. Scale values of 20 (park), 10
(agricultural) and 15 (urban) were selected at the finest level. Segmentation scales varied across
all scenes, and no segmentation scale mirrored those of the other sites at any level.
Table 2-4. Hierarchical segmentation scale for each study site and corresponding target land
cover class
Natural Landscape
Rural Landscape
Urban Landscape
Scale Target Land
cover
Scale Target Land
cover
Scale Target Land cover
125
Forested upland,
water
200
Agricultural
fields
75 Urban matrix,
agricultural fields
40 Wetland, barren
land, herbaceous
upland
60
Wetlands, water,
urban matrix,
meadow
50 Wetlands, water,
forests, herbaceous
upland, barren land
20 Wetland classes 10 wetland classes 15 Wetland classes
Modified ED3 results showed a consistent positive evaluation for all scale parameters selected
by visual assessment (Figure 2-7). ED3 results range from 0 to 0.71 with lower values
corresponding to better quality segments that more closely match with reference polygons (Yang

35
et al., 2015). In the corresponding graphs, the selected scales fell within the lowest dip in the data
points, which characterises scale parameters with the greater fitness in matching with reference
polygons (Yang et al., 2015). Across all scale levels (coarse, medium, fine) and image scenes
(park, agricultural, urban), scale values selected through visual assessment fell within this region
indicating a robust selection. Interestingly, at the coarse (first) level, results across all three
scenes do not demonstrate a pronounced trough but rather a gradual descent in values indicating
that several scale values are appropriate at this level.
The contribution of additional input layers (DEM, NDVI, texture) improved overall
segmentation results across all scenes. At the coarse level, it was found the inclusion of the
NDVI layer improved delineation of vegetated boundaries. For example, in the agricultural
scene, NDVI data improved crop field segments such that object boundaries more closely
followed the outer edges of each field (Figure 2-8). At the medium level, elevation data from the
DEM resulted in improved segmentation of wetland boundaries (Figure 2-9). Texture
information was useful at the finest scale level for segmenting within wetland features (Figure 2-
10). The inclusion of this layer resulted in larger image objects more representative of distinct
vegetation communities.
A comparison with reference thematic maps (Figure 2-11) indicates that the segmentation
captured a greater level of variation in wetland components such as floating vegetation, islands,
and water (Figure 2-11 a, b, c), yet suffered from a varying degree of over and under
segmentation when the swamp class was present (Figure 2-11 d, e, f). Multispectral data used in
this study did not capture information from the mid infrared water-absorbing regions, therefore if
visible standing water was not evident at the time of image acquisition, swamps could be easily
confused with upland forests. In both the rural and agricultural study areas, some wetlands were
identified that were missing from provincial reference datasets indicating that this approach is
not only able to capture additional wetlands, but also able to provide a greater level of detail
concerning within wetland boundaries and components.

36
.
Figure 2-7. Quantitative evaluation of selected scale parameter with the modified ED3
algorithm at the coarse (diamond), medium (square), and fine (triangle) levels for the (a)
Algonquin park site, (b) Brant county agricultural site and (c) east Toronto urban site.
Hollow circles denote the selected scale value through visual assessment.

37
Figure 2-8. Comparison of coarse level segmentation results over the Brant County
agricultural scene (a) with subset shown in red square and (b). Results of segmentation at
scale 200 using all seven input layers shown in (c), and at the same scale 200 with the
NDVI layer excluded in (d). White arrows in (d) show locations of over-segmentation that
do not correspond with crop field boundaries.

38
Figure 2-9. Comparison of medium level segmentation results over the Algonquin park
scene (a) with subset a wetland complex shown in the red square and (b). Results of
segmentation at scale 40 using all seven input layers (c), and at the same scale 40 with the
DEM layer excluded (d). White arrow in (c) shows improved segmentation of a wetland
boundary (to the right of the indicated line) with the inclusion of the DEM layer.

39
Figure 2-10. Comparison of fine level segmentation results over the east Toronto urban scene
(a) and with subset of a marsh complex shown in the red square and (b). Results of
segmentation at scale 15 using all seven input layers (c), and at the same scale 15 with the
texture layer excluded (d). Note the significant over-segmentation of the texture-excluded
image in (d).

40
Figure 2-11. Sample view of wetlands enclosed by object boundaries created by the FNEA
multiresolution segmentation algorithm (yellow), and its corresponding reference boundary
(white) showing improved delineation of wetland boundaries (a), under segmentation (b), better
detection of within wetland components (c, d); and examples of over segmentation, particularly
of treed wetlands (e, f). Wetlands in the top row are from the natural park site, middle row
wetlands are from the rural site, and bottom row wetlands are from the urban site. Reference
polygons were provided by the OMNR (park site: a, b), Grand River Conservation Authority
(agricultural site: c, d), and the Toronto Region Conservation Authority (urban site: e, f).

41
Segmentation of non-wetland classes varied across sites. The acquisition of early spring imagery
resulted in better overall segmentation of dominant crop land in the rural-agricultural scene
likely due to the fact that the majority of fields were bare, and borders were clearly visible.
However, some smaller features such as hedgerows and isolated irrigation ponds suffered from
absorption into these larger agricultural fields. In contrast, the urban scene which also included
agricultural fields suffered from a greater over and under-segmentation, as boundaries were not
as distinct in this landscape. This is attributed to variation in land use patterns and a greater
proportion of mixed vegetation classes adjacent to managed agricultural fields (see final
classification maps, Figure 2-13).
There were no agricultural fields, or isolated ponds in the natural Algonquin Park study area and
the dominant forest class was segmented with a high accuracy. While forest cover was relatively
continuous across most of the scene in the natural landscape, forested uplands in the urban and
rural sites were highly fragmented resulting in comparatively lower segmentation accuracy.
2.4.2 Classification
GeoeEye1 and WorldView2 data were classified initially into 8 classes for the park and urban
sites, and 7 classes for the agricultural site. All scenes were then merged into three common
classes of wetland, upland, and water for comparison across study sites.
Overall Classification. Overall classification accuracy was the highest over the park landscape
(overall accuracy 0.90, kappa 0.88), followed by the urban landscape (overall accuracy 0.86,
kappa 0.84) and lowest over the agricultural landscape (overall accuracy 0.81, kappa 0.78)
(Table 2-5). Producer’s accuracies were high across all landscapes (> 0.80) with the exceptions
of herbaceous upland (0.57), and forested upland (0.74) in the agricultural site, and swamp
wetlands in both the agricultural (0.69) and urban (0.67) sites. Similarly, user’s accuracies were
high across all landscapes (> 0.80) with the exceptions of the swamp class (0.65), forested
upland (0.66), and agricultural land (0.79) for the agricultural land cover map, as well as the
herbaceous upland class for both the agricultural (0.50) and urban (0.74) sites. The most poorly
achieving classes were the swamp class, and the herbaceous upland class in the agricultural
landscape. For all study sites, water received the highest classification accuracy.

42
Table 2-5. Accuracy statistics for land cover classes at each study site (PA =
producer’s accuracy, UA = user’s accuracy).
Park Site Agricultural Site Urban Site
(Algonquin Park) (Brant County) (East Toronto)
Land cover Class
PA
UA
PA
UA
PA
UA
Marsh 0.91 0.94 0.81 0.93 0.81 0.90
Swamp 0.83 0.81 0.69 0.65 0.67 0.95
Fen 0.89 0.83 - - - -
Bog 0.87 0.84 - - - -
Water 0.97 0.94 0.98 0.96 0.97 0.88
Forested Upland 0.94 0.91 0.74 0.66 0.89 0.96
Herbaceous Upland 0.80 0.82 0.57 0.50 0.84 0.74
Agricultural Land - - 0.81 0.79 0.91 0.83
Built/Urban Matrix - - 0.95 0.95 1.0 0.89
Barren Land 0.92 0.95 - - 0.85 0.85
Overall (kappa)
0.90 (0.88) 0.81 (0.78) 0.86 (0.84)
The error matrix for the park site is shown in Table 2-6. In this landscape with relatively low
heterogeneity due to human disturbance, notable errors include the misclassification of swamps
as forested upland, and herbaceous upland as forested upland and to a lesser extent, marshes as
fen, and herbaceous upland as forested upland. In the agricultural landscape of greater
disturbance due to human activities, most significant misclassification occurred with forested
upland objects being erroneously committed to the swamp class and vice versa (Table 2-7). To a
lesser extent, marshes were misclassified as swamps, agricultural land was incorrectly classified
herbaceous upland, and herbaceous upland was misclassified as agricultural land. The error
matrix for the classification map produced for the highly disturbed urban scene (Table 2-8),
included substantial misclassification of herbaceous upland as forested upland, and herbaceous
upland classified as marsh wetland. Lesser instances of erroneous classification include water
image objects classified as marsh, agricultural land committed to herbaceous upland, and built-
urban matrix objects misclassified as barren land.

43
Table 2-7. Error matrix for the landcover classification of the Algonquin park
study site (8 classes), using GeoEye1 MS data.
Table 2-6. Error matrix for the landcover classification of the Brant County
agricultural site (7 classes) using GeoEye1 MS data

44
Wetland-Upland Classification. Individual classes were merged into wetland (marsh, fen, bog,
swamp), upland (forest, meadow, agricultural field, built, barren), and water categories in order
to compare wetland accuracy amongst non-wetland classes (Table 2-9). Accuracy for the merged
classification map was the highest for the park study site (overall accuracy 0.90, kappa 0.86),
followed by the urban site (overall accuracy 0.86, kappa 0.81) with the agricultural landscape
receiving the lowest accuracy (overall accuracy 0.76, kappa 0.71). Producer’s accuracy was high
across all study sites (> 80%) with the exception of uplands in the agricultural landscape. Map
user accuracies were generally high (> 80%) with the exception of wetlands, and water classes in
the agricultural and urban landscape (66-77%).
Table 2-8. Error matrix for the landcover classification of the east Toronto urban
site (8 classes) using WorldView2 MS data.

45
Table 2-9. Accuracy statistics of producer’s accuracy (PA), user's accuracy (UA),
overall accuracy and Kappa statistic for merged wetland, upland, and water classes
across all study sites.
Park Site
(Algonquin Park)
Agricultural Site
(Brant County)
Urban Site
(East Toronto)
Land cover Class PA UA PA UA PA UA
Wetland 0.86 0.95 0.80 0.71 0.85 0.74
Upland 0.92 0.90 0.64 0.91 0.97 0.84
Water 0.95 0.97 1.00 0.66 0.98 0.77
Overall (kappa) 0.90 (0.86) 0.76 (0.71) 0.86 (0.81)
Across the merged classification map of the park site, only minimal errors occurred between
wetland and upland classes while greater errors were found in the agricultural and urban merged
maps (Table 2-10). Focussing on wetlands, there was a high error of commission of uplands into
the wetland class, and a slightly lower omission of wetland objects into the water class in the
agricultural landscape. Over the urban study area wetland objects were erroneously classified as
both water and upland, while only minimal errors of commission occurred.
Table 2-10. Error matrices for grouped water, wetland, and upland classes over each study area.
Numbers denote image objects (not individual pixels).

46
2.4.3 Comparison of Sample Attribute Separation between Classes
Since the nearest neighbour classifier selects the most suitable attributes to classify a land cover
class, I further investigated the most suitable attributes used for class separation by examining
overlap values between classified polygons. The mean object value of the red band, near infrared
band and NDVI provided the greatest separation between wetlands and all other classes (Figure
2-13). The mean object value from the NDVI layer was used most frequently in discriminating
wetland classes from other land cover groups over the urban east Toronto site. The near-infrared
layer was used most frequently to separate between wetland and upland classes over the natural
Algonquin Park and rural Brant County sites. Texture was used to separate wetlands from built
areas in the rural site disproportionately more than in the natural and urban landscapes.
Figure 2-12. Comparison of mean object layer values providing the best separation
between wetlands and all other classes at each study site. Y-axis shows number of times
a layer provided the best separation distance between classes, normalized out of 1.
Average values are standardized across total number of land cover classes at each site.

47
Figure 2-13. Classification results showing original satellite image (a, d, g) (RGB: NIR-Red-
Green), final classified map (b, e, h) with subsets in the red polygons expanded in (c, f, i) over
the Algonquin Park natural site (first row), the Brant county agricultural site (middle row), and
the east Toronto urban site (bottom row).
Discussion
In this study the accuracy of a multi-scale GEOBIA approach was examined in correctly
classifying wetlands across three different landscapes. Despite the variability in study areas,
overall wetland class accuracy across scenes was greater than 80% indicating that this approach
is efficient across scenes of varying heterogeneity due to human-disturbance.

48
2.5.1 Segmentation and the GEOBIA approach
The multi-scale object-based approach provided an effective method of partitioning wetlands,
and other land cover classes. The class accuracy of wetlands (marsh, swamp, bog, fen) was
higher than grouped upland-wetland accuracy across all sites, which is attributed in part, to the
use of the hierarchical parent-child segmentation approach. The segmentation of whole wetland
objects into smaller objects for within wetland classification allowed this process to be
constrained to its parent class which minimized the potential for misclassification with other
groups. Repeatedly modifying training objects to achieve the best classification also contributed
to improving final map results. Specifically, a sample of incorrectly classified objects should be
iteratively selected as training samples to retrain the classifier so that subsequent classifications
can target areas of demonstrated spectral overlap or confusion. The visual approach to selecting
the scale parameter proved to be a robust method demonstrating the inherent ability of the human
eye to distinguish between landscape elements and neighbourhood context. The use of the
modified ED3 algorithm to evaluate the scale parameter provided important quantitative support
for scale selection, as well as further information on the range of appropriate scale values. In
general, the combination of both quantitative and qualitative measures are recommended as each
is important for scale parameter selection. It should also be noted that the identified scale at each
level cannot be interpreted as a universal value that can be applied to any image of similar
composition or resolution (spectral, spatial, and radiometric). The size and shape of image
objects is greatly affected by the extent, composition, spectral heterogeneity and type of
segmentation algorithm used. For example in preliminary segmentation tests, it was found that a
subset of a larger image segmented at a scale value of 100, would create very different image
objects than those created by segmenting the entire image at the same scale of 100. Here, the
extent alone alters the resultant objects relative to the scale value which remains constant.
Nevertheless, the scale values reported here are for the purpose of comparison of targeted land
cover classes within the study sites, and not as a recommendation for optimal scale values to use
for other images composed of similar elements as ours.
At the coarse segmentation level, the addition of the NDVI layers resulted in a general
improvement in delineating boundaries of classes which were comprised of, or adjacent to
vegetation such as crop fields bordered by hedgerows, or mixed herbaceous vegetation.
Multispectral indices have been shown to improve models of wetland discrimination (Bradley

49
and Fleishman, 2008) due to their sensitivity to vegetation surface roughness and phenological
stage (Davranche et al., 2010). Elevation information improved segmentation of whole wetland
boundaries at the medium scale, and particularly in palustrine (inland) wetlands as opposed to
lacustrine (lake-associated) wetlands. This is likely a result of a greater difference in elevation
between inland wetlands and the terrestrial uplands which completely surround them. The NDVI
layer contributed more to the segmentation of lacustrine wetlands, which were present in small
proportions in the park and urban scenes.
Texture contributed most to segmentation at the finest scale where the spatial information
improved delineation of wetland vegetation communities. Resultant image objects were larger
than those segmented without textural information, and they also more accurately captured edges
where macrophyte communities transitioned. Previous work has shown that texture analysis can
improve classification accuracy by reducing the confusion between permanent crops and
perennial meadows (Peña-Barragán et al., 2011). For future work, higher order texture measures
should be explored such as those derived from the grey-level co-occurrence matrix (Haralick et
al.,1973), which has shown success in discriminating between deciduous and evergreen tree
species (Kim et al., 2009) and may improve classification accuracy between treed uplands and
swamps (treed wetlands).
2.5.2 Classification Accuracy
Wetlands in landscapes of varying heterogeneity were classified with an accuracy between 81%
(kappa 0.78) and 90% (kappa 0.88) with the least disturbed site achieving the highest accuracy.
While what is considered acceptable for mapping accuracy may vary, the recommended target of
85% overall accuracy (Foody, 2002; Thomlinson, Bolstad, & Cohen, 1999) was achieved by two
of the three classification maps. Not unexpectedly, differences in upland complexity resulted in
varied outcomes with regard to both segmentation and classification accuracy. When comparing
overall classification accuracy, the more disturbed sites consistently demonstrated higher errors
compared to the less disturbed park site, with the agricultural landscape performing the poorest
overall. An analysis of the error matrix for this site suggests that a dominant contributor to
mapping error was the confusion between the forested upland and swamp class. The high
proportion of swamp areas present in this landscape likely contributed to the lower classification
error. Here, the lower accuracy results were partly attributed to the presence of facultative tree

50
species such as Red maple (Acer rubrum) which can grow in both saturated wetland soils and dry
upland soils and would show spectral and textural similarity if above ground reflectance does not
reveal the hydrologic state beneath (Sader et al., 1995). Confusion between agricultural land and
herbaceous upland further reduced accuracy. Notably, all confused classes belonged to groups
containing an abundance of vegetation, indicating the need for better measures to separate these
similar classes. Similarly, the urban land cover map demonstrated reduced accuracy with the
swamp class, despite (or partly as a result of) the low proportion of swamps in this scene. The
use of advanced texture measures such as the grey level co-occurrence matrix, multi-date MS
imagery or data from active sensors would likely help to improve accuracy over this class and
should be investigated further.
Overall, it is generally accepted that mapping error on less frequent classes like wetlands will be
higher than error on dominant classes (Cunningham, 2006) and the relative rarity of wetlands at
each site likely contributed to the over/under classification and spectral confusion of wetlands
classes. Wright & Gallant (2007) documented a similar error for palustrine wetland mapping in
Yellowstone National Park for which wetlands comprised less than 6% of the total cover.
The use of temporal imagery has been shown to improve wetland detection, and utilises a major
advantage of Earth-observing satellite data. Dechka et al. (2002) classified prairie wetland
habitats in southern Saskatchewan using two IKONOS images acquired 24 May 2000 and 29
July 2000 to maximize seasonal variation in vegetation growth from minimal spring conditions
to mid-summer growth. The multi-temporal combination of May and July imagery produced the
highest accuracy (95.9%), although compared to results using the only the July image (84.4%)
authors concluded that the increase in accuracy may not be enough to justify the high cost of
additional multi-temporal image acquisitions. Interestingly, in this study the earlier season (May)
image produced the lower classification accuracy (50.5%), while others found that spring
imagery was most optimal for wetland discrimination (Ozesmi & Bauer, 2002; Gilmer et al.,
1980). Dingle-Robertson (2014) examine Ontario wetland classification according to the Ontario
Wetland Evaluation System across three seasons using WorldView2, Landsat5, and Radarsat2
data and found that high spatial resolution WorldView2 data from spring or summer acquisitions
produced the highest accuracies. Other multi-temporal work has found improvement in the
identification of wetland plant species using a combination of field spectral data, LIDAR top of
canopy data, and multi-date Quickbird imagery (Gilmore et al., 2002), as well as improved

51
accuracy in mapping seasonally flooded forested wetlands using multi-date RADARSAT data
(Townsend, 2001). In this study, multi-date imagery was only available for two of the three sites
(the urban east Toronto site only had high spatial resolution data available in July) therefore a
multi-date evaluation was not possible. However, future work requiring higher classification
accuracy, for example in wetland change detection studies, should consider employing a multi-
temporal approach.
Other factors may have influenced final classification accuracy such as the difference in timing
of image acquisitions across study areas, and the difference in sensors. The Brant County
agricultural site and the Algonquin park site were both acquired in the spring from the GeoEye1
sensor (25 May 2013, and 9 April 2012 respectively), albeit in different years, whereas the east
Toronto urban site was acquired in the summer (25 July 2012) from the WorldView2 sensor.
From an operational standpoint, acquiring satellite imagery that perfectly matches the required
timing and conditions mandated by the study, can present one of the greatest challenges in
remote sensing research. Shifting priorities in commercial tasking orders, limited availability of
archived imagery, presence of cloud cover, and high cost, can collectively contribute to
mismatches in sensor and temporal continuity. Thus results from the urban scene may not be
directly comparable to results from the agricultural and park scenes, as the presence of
vegetation further along in development and growth, as well as the slightly narrower bandwidth
of the red channel (630-390 nm WorldView2 compared to 655-690 nm GeoEye1), and the near
infrared channel (770-895 nm WorldView2 compared to 780-920 nm GeoEye1) may have
influenced final results. Yet, these differences can also have a positive effect if identifying
potential benefits or disadvantages of one sensor configuration in comparison with the other. For
example, it is interesting that for the landscapes represented by GeoEye1 imagery (park and
agricultural), which operates with a wider NIR bandwidth, the contribution of this band to
classification is greater than the NDVI layer. Conversely, for the urban site based on the
narrower NIR band of WorldView2, the opposite is true. This raises the possibility that different
sensors may utilise spectral layers differently in the classification process as a result of their
bandwidth, and is a topic warrants further investigation. However, despite this discontinuity in
sensor and image acquisition timing, accuracy results over the urban site were neither higher nor
lower than the accuracy over the other two sites with matching sensors and dates. While this
uncertainty should be recognized, I do not believe it negates the results provided in this study.

52
2.5.3 Landscape heterogeneity
A primary objective of this study was to examine if this methodological approach was robust to
variability in scene heterogeneity caused by human disturbance. Overall, with wetland accuracy
results above 80% across all scenes, it can be concluded that this method was indeed well-suited
to classifying wetlands from landscapes of varied heterogeneity, but there was a slight pattern of
decreased accuracy with increasing scene complexity. Fahrig et al. (2011) made an important
distinction between compositional heterogeneity (the variation of land cover types) and
configurational heterogeneity (the variation in spatial patterning of land cover types) with which
to describe a landscape. However, it should be noted that there is no universally accepted
description of ecological heterogeneity (Cadenasso et al. 2007), which makes it difficult to
identify those regions for which special considerations should be taken.
In terms of land cover heterogeneity, Smith et al. (2002) quantified both land cover patch size
and heterogeneity over a large portion of the eastern US and demonstrated an almost continuous
decrease in accuracy as heterogeneity increased, suggesting that landscape characteristics should
be afforded the same consideration in accuracy assessments as those conducted on land cover
classes. We noticed a similar relationship between land cover heterogeneity and map accuracy
among our study sites with the natural site achieving the best results, and more disturbed sites
performing worse. The decreased accuracy over the agricultural site was not anticipated since
built features were considered more complex than agricultural fields, and coverage of built areas
was considerably higher in the urban region. Yet, the relative ease of segmentation and
classification of residential parcels in both disturbed landscapes indicated that this class may not
contribute as much to classification confusion as originally thought. Upon further examination of
results, urban-built features have greater spectral and textural distinction which separate them
more easily from spectrally and texturally similar vegetated land cover classes. A careful review
of misclassified objects indicated that the wide range of upland vegetation classes of both human
and natural origin, may be responsible for the lower map accuracy in the rural site. This was
especially true along transitional areas where one dominant class transitioned into another.
Cingolani et al. (2004) experienced a similar challenge in mapping heterogeneous rangeland
ecosystems where the influence of grazed lands combined with natural environmental gradients
to create complex vegetated patterns that were difficult to separate.

53
Conclusions
A simple yet efficient methodology for mapping wetlands across landscapes of varied
heterogeneity was presented in this chapter. High spatial resolution satellite data and the
GEOBIA approach can be combined to provide a sound methodology for characterizing whole
wetlands and individual wetland classes. The GEOBIA approach specifically, was very
appropriate for wetland detection as it allowed for a nested multi-scale approach to constrain
classification of wetland components to within defined wetland boundaries. In regards to
landscape variations, a more heterogeneous landscape may negatively affect accurate wetland
classification due to increased spatial and compositional complexity. Specifically, rural
landscapes presented special challenges due to the large proportion of vegetated upland classes
of both anthropogenic and natural origin that reduced segmentation accuracy and resulted in
greater spectral overlap during the classification.
Future work in wetland mapping of treed swamp wetlands should include SAR data which can
capture the presence of standing water underneath tree canopies. In all cases, image acquisition
during early spring leaf-off conditions are recommended to aid in discriminating between
confounding vegetation classes, though from an operational standpoint reliance on archived
imagery often means that this is not possible.
Overall, the trend of reduced wetland coverage with increasing landscape complexity due to
human disturbance creates ongoing challenges for accurate wetland delineation. Wetlands are
important ecosystems contributing an estimated 40% of the value of global ecosystem services
(Zedler, 2003) and a better recognition of their value should be demonstrated through stricter
legislation for wetland protection, particularly where new developments are concerned. In many
areas a previous wetland inventory may not exist, making identification, evaluation and
monitoring of wetlands a challenge. This study demonstrated a robust approach to delineating
wetlands across variable landscapes which can provide starting information for better
management of these ecosystems. The multi-temporal aspect of satellite sensors can be exploited
to provide repeat coverage allowing for change detection and evaluation of wetland health over
time. However, the greater issue at hand is the ongoing loss and degradation of wetlands
worldwide, including the vast peatlands of the north which will have serious consequences for
global climate as well as the maintenance of biodiversity.

54
References
Anderson, J.E., and Perry, J.E. (1996). Characterization of wetland plant stress using leaf
spectral reflectance: Implications for wetland remote sensing. Wetlands, 16, 477-487.
Anderson, J. R., Hardy, E. E., Roach, J. T., & Witmer, R. E. (1976). A land use and land cover
classification system for use with remote sensor data. A Revision of the Land Use
Classification System as Presented in U.S. Geological Survey Circular 671, 964, 41.
Becker, B. L., Lusch, D. P., & Qi, J. (2007). A classification-based assessment of the optimal
spectral and spatial resolutions for Great Lakes coastal wetland imagery. Remote Sensing
of Environment, 108, 111 – 120.
Benz, U. C., Hofmann, P., Willhauck, G., Lingenfelder, I., & Heynen, M. (2004). Multi-
resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready
information. ISPRS Journal of Photogrammetry and Remote Sensing, 58, 239–258.
Berberoğlu, S., Akin, a., Atkinson, P. M., & Curran, P. J. (2010). Utilizing image texture to
detect land-cover change in Mediterranean coastal wetlands. International Journal of
Remote Sensing, 31(11), 2793–2815.
Blaschke, T. (2010). Object based image analysis for remote sensing. ISPRS Journal of
Photogrammetry and Remote Sensing, 65(1), 2–16.
Blaschke, T., & Hay, G. J. (2001). Object-oriented image analysis and scale-space: theory and
methods for modelling and evaluating multiscale landscape structure. International
Archives of Photogrammetry and Remote Sensing, 34(4), 22-29.
Blaschke,T., G. J. Hay, M. Kelly, S. Lang, P. Hofmann, E. Addink, R. Q. Feitosa, F. van der
Meer, H. van der Werff, F. van Coillie, and D. Tiede, 2014. Geographic Object-Based
Image Analysis – Towards a new paradigm, ISPRS Journal of Photogrammetry and
Remote Sensing, 87(1), 180-191.
Bradley, B. A., & Fleishman, E. (2008). Can remote sensing of land cover improve species
distribution modelling? Journal of Biogeography, 35(7), 1158-1159.
Brock, M. A., Smith, R. G. B., & Jarman, P. J. (1999). Drain it , dam it : alteration of water
regime in shallow wetlands on the New England Tableland of New South Wales ,
Australia. Wetlands Ecology and Management, 7, 37–46.
Cadenasso, M. L., Pickett, S. T. a, & Schwarz, K. (2007). Spatial heterogeneity in urban
ecosystems: reconceptualizing land cover and a framework for classification. Frontiers in
Ecology and the Environment, 5(2), 80–88.
Castillejo-González, I. L., López-Granados, F., García-Ferrer, A., Peña-Barragán, J. M., Jurado-
Expósito, M., de la Orden, M. S., & González-Audicana, M. (2009). Object- and pixel-
based analysis for mapping crops and their agro-environmental associated measures using
QuickBird imagery. Computers and Electronics in Agriculture, 68, 207–215.
Cingolani, A. M., Renison, D., Zak, M. R., & Cabido, M. R. (2004). Mapping vegetation in a
heterogeneous mountain rangeland using landsat data: An alternative method to define
and classify land-cover units. Remote Sensing of Environment, 92, 84–97.
Clinton, N., Holt, A., Scarborough, J., Yan, L., & Gong, P. (2010). Accuracy assessment
measures for object-based image segmentation goodness. Photogrammetric Engineering
& Remote Sensing, 76(3), 289–299.

55
Congalton, R. G. (1991). A review of assessing the accuracy of classifications of remotely
sensed data. Remote Sensing of Environment, 37, 35–46.
Corcoran, J. M., Knight, J. F., & Gallant, A. L. (2013). Influence of multi-source and multi-
temporal remotely sensed and ancillary data on the accuracy of random forest
classification of wetlands in northern Minnesota. Remote Sensing, 5, 3212–3238.
Davranche, A., Lefebvre, G., & Poulin, B. (2010). Wetland monitoring using classification trees
and SPOT-5 seasonal time series. Remote Sensing of Environment, 114, 552–562.
Definiens (2008). Definiens Developer 7 User Guide. Munchen, Germany. 506 pp.
Dillabaugh, K. a, & King, D. J. (2008). Riparian marshland composition and biomass mapping
using Ikonos imagery. Canadian Journal of Remote Sensing, 34(2), 143–158.
Dingle Robertson, L., & King, D. J. (2011). Comparison of pixel- and object-based classification
in land cover change mapping. International Journal of Remote Sensing, 32(6), 1505–
1529.
Dissanska, M., Bernier, M., & Payette, S. (2009). Object-based classification of very high
resolution panchromatic images for evaluating recent change in the structure of patterned
peatlands. Canadian Journal of Remote Sensing, 35(2), 189–215.
Drăguţ, L., Csillik, O., Eisank, C., & Tiede, D. (2014). Automated parameterisation for multi-
scale image segmentation on multiple layers. ISPRS Journal of Photogrammetry and
Remote Sensing, 88, 119–127.
Drǎguţ, L., Tiede, D., & Levick, S. R. (2010). ESP: a tool to estimate scale parameter for
multiresolution image segmentation of remotely sensed data. International Journal of
Geographical Information Science, 24(6), 859–871.
Duro, D. C., Franklin, S. E., & Dubé, M. G. (2012). A comparison of pixel-based and object-
based image analysis with selected machine learning algorithms for the classification of
agricultural landscapes using SPOT-5 HRG imagery. Remote Sensing of Environment,
118, 259–272.
Fahrig, L., Baudry, J., Brotons, L., Burel, F. G., Crist, T. O., Fuller, R. J., … Martin, J. L. (2011).
Functional landscape heterogeneity and animal biodiversity in agricultural landscapes.
Ecology Letters, 14, 101–112.
Foody, G. M. (2002). Status of land cover classification accuracy assessment. Remote Sensing of
Environment, 80, 185–201.
Fournier, R. a, Grenier, M., Lavoie, A., & Hélie, R. (2014). Towards a strategy to implement the
Canadian Wetland Inventory using satellite remote sensing. Canadian Journal of Remote
Sensing, 33(sup1), S1–S16.
Fournier, R. a., Grenier, M., Lavoie, A., & Hélie, R. (2007). Towards a strategy to implement the
Canadian Wetland Inventory using satellite remote sensing. Canadian Journal of Remote
Sensing, 33, 1–16.
Gibbs, J. P. (1993). Importance of small wetlands for the persistence of local populations of
wetland-associated animals. Wetlands, 13(1), 25–31.

56
Gilmer D.S., Work E.A. Jr, Colwell J.E. and Rebel D.L. (1980). Enumeration of prairie wetlands
with Landsat and aircraft data. Photogrammetric Engineering and Remote Sensing, 46:
631-634.
Gilmore, W., Barrett, C., Prisloe, H., Chadwick (2008). Integrating multi-temporal spectral and
structural information to map wetland vegetation in a lower Connecticut River tidal
marsh. Remote Sensing of Environment, 112(11): 4048-4060.
Grenier, M., Demers, A. M., Labrecque, S., Benoit, M., Fournier, R. a., & Drolet, B. (2007). An
object-based method to map wetland using RADARSAT-1 and Landsat ETM images:
test case on two sites in Quebec, Canada. Canadian Journal of Remote Sensing, 33(1),
S28–S45.
Halabisky, M. (2011). Object-based classification of semi-arid wetlands. Journal of Applied
Remote Sensing, 5(1), 053511–13.
Haralick, R. M., Shanmugam, K., & Dinstein, I. (1973). Textural features for image
classification. IEEE Transactions on Systems, Man, and Cybernetics, 3(6), 610–621.
Harken, J., & Sugumaran, R. (2005). Classification of Iowa wetlands using an airborne
hyperspectral image: a comparison of the spectral angle mapper classifier and an object-
oriented approach. Canadian Journal of Remote Sensing, 31(2), 167–174.
Hirano, A., Madden, M., & Welch, R. (2003). Hyperspectral image data for mapping wetland
vegetation. Wetlands, 23(2), 436–448.
Hopkinson, C., Chasmer, L. E., Sass, G., Creed, I. F., Sitar, M., Kalbfleisch, W., & Treitz, P.
(2005). Vegetation class dependent errors in LIDAR ground elevation and canopy height
estimates in a boreal wetland environment. Canadian Journal of Remote Sensing, 31(2),
191–206.
Hu, X. and Q. Weng. 2011. Impervious surface area extraction from IKONOS imagery using an
object-based fuzzy method. Geocarto International, 26(1), 3-20.
Im, J., Jensen, J. R., & Tullis, J. A. (2008). Object‐based change detection using correlation
image analysis and image segmentation. International Journal of Remote Sensing, 29(2),
399-423.
Jensen, J. R., Rutchey, K., Koch, M. S., & Narumalani, S. (1995). Inland wetland change
detection in the Everglades Water Conservatin Area 2A using a time series of normalized
remotely sensed data. Photogrammetric Engineering & Remote Sensing, 61(2), 199–209.
Johnston, R., & Barson, M. (1993). Remote sensing of Australian wetlands: An evaluation of
Landsat TM data for inventory and classification. Australian Journal of Marine and
Freshwater Research, 44, 235–52.
Kim, M., Madden, M., & Warner, T. A. (2009). Forest type mapping using object-specific
texture measures from multispectral Ikonos imagery : Segmentation quality and image
classification issues. ISPRS, Journal of Photogrammetry and Remote Sensing, 75(7),
819–829.
Klemas, V. (2011). Remote sensing techniques for studying coastal ecosystems: An overview.
Journal of Coastal Research, 27, 2–17.
Liu, Y., Bian, L., Meng, Y., Wang, H., Zhang, S., Yang, Y., Shao, X, & Wang, B. (2012).
Discrepancy measures for selecting optimal combination of parameter values in object-

57
based image analysis. ISPRS Journal of Photogrammetry and Remote Sensing, 68, 144–
156.
Mallinis, G., Koutsias, N., Tsakiri-Strati, M., & Karteris, M. (2008). Object-based classification
using Quickbird imagery for delineating forest vegetation polygons in a Mediterranean
test site. ISPRS Journal of Photogrammetry & Remote Sensing, 63, 237-250.
Midwood, J. D., & Chow-Fraser, P. (2010). Mapping Floating and Emergent Aquatic Vegetation
in Coastal Wetlands of Eastern Georgian Bay, Lake Huron, Canada. Wetlands, 30, 1141–
1152.
Myint, S. W., Gober, P., Brazel, A., Grossman-Clarke, S., & Weng, Q. (2011). Per-pixel vs.
object-based classification of urban land cover extraction using high spatial resolution
imagery. Remote Sensing of Environment, 115(5), 1145–1161.
NWWG: National Wetlands Working Group. (1997). The Canadian Wetland Classification
System, 2nd Edition. Warner, B.G. and Rubec, C.D.A. (eds), Wetlands Research Centre,
University of Waterloo, ON, Canada. 68pp.
OMAFRA: Ontario Ministry of Agriculture, Food, and Rural Affairs. (2014). Corn Production in
Ontario: Reducing the risk to pollinators. Retrieved May 24 2015 from
http://www.omafra.gov.on.ca/english/crops/field/corn.html
Ozesmi, S., & Bauer, M. (2002). Satellite remote sensing of wetlands. Wetlands Ecology and
Management, 10, 381–402.
Peña-Barragán, J. M., Ngugi, M. K., Plant, R. E., & Six, J. (2011). Object-based crop
identification using multiple vegetation indices, textural features and crop phenology.
Remote Sensing of Environment, 115, 1301–1316.
Powers, R. P., Hay, G. J., & Chen, G. (2011). How wetland type and area differ through scale: A
GEOBIA case study in Alberta’s Boreal Plains. Remote Sensing of Environment, 117,
135–145.
Prigent, C., Matthews, E., Aires, F., & Rossow, W. B. (2001). Remote sensing of global wetland
dynamics with multiple satellite data sets. Geophysical Research Letters, 28(24), 4631.
Richter, R., et al (2006) An automatic atmospheric correction algorithm for visible-NIR imagery.
International Journal of Remote Sensing, 27 (10), 2077-2085.
Richter, R. (1996) Atmospheric correction of satellite data with haze removal including a haze-
clear transition region. Computers & Geosciences, 22 (6), 675-681.
Rokitnicki-Wojcik, D., Wei, A., & Chow-Fraser, P. (2011). Transferability of object-based rule
sets for mapping coastal high marsh habitat among different regions in Georgian Bay,
Canada. Wetlands Ecology and Management, 19(3), 223–236.
Sawaya, K., Olmanson, L. ., Heinert, N. J., Brezonik, P. L., & Bauer, M. E. (2003). Extending
satellite remote sensing to local scales: land and water resource monitoring using high-
resolution imagery. Remote Sensing of Environment, 88, 144 – 156.
Schmidt, K., & Skidmore, A. (2003). Spectral discrimination of vegetation types in a coastal
wetland. Remote Sensing of Environment, 85(1), 92–108.
Semlitsch, R. D., & Bodie, J. R. (1998). Are small, isolated wetlands expendable? Conservation
Biology, 12(5), 1129–1133.

58
Shanmugam, P., Ahn, Y. H., & Sanjeevi, S. (2006). A comparison of the classification of
wetland characteristics by linear spectral mixture modelling and traditional hard
classifiers on multispectral remotely sensed imagery in southern India. Ecological
Modelling, 194, 379–394.
Smith, J. H., Wickham, J. D., Stehman, S. V, & Yang, L. (2002). Impacts of patch size and land-
cover heterogeneity on thematic image classification accuracy. Photogrammetric
Engineering and Remote Sensing, 68(1), 65–70.
Song, C., Woodcock, C. E., Seto, K. C., Lenney, M. P., & Macomber, S. A. (2001).
Classification and change detection using Landsat TM data: when and how to correct
atmospheric effects? Remote sensing of Environment, 75(2), 230-244.
Statistics Canada (2011). Focus on Geography Series. Ottawa, Ontario. April 17. Retrieved
January 6, 2013 from https://www12.statcan.gc.ca/census-recensement/2011/as-sa/fogs-
spg/Facts-csd-eng.cfm?LANG=Eng&GK=CSD&GC=3529005
Thomlinson, J. R., Bolstad, P. V., & Cohen, W. B. (1999). Coordinating methodologies for
scaling land cover classifications from site-specific to global: Steps toward validating
global map products. Remote Sensing of Environment, 70, 16–28.
Townsend, P. A. (2001). Mapping seasonal flooding in forested wetlands using multi-temporal
Radarsat SAR. Photogrammetric Engineering and Remote Sensing, 67(7), 857-864.
Wang, L., Sousa, W. P., & Gong, P. (2004). Integration of object-based and pixel- based
classification for mapping mangroves with IKONOS imagery. International Journal of
Remote Sensing, 25(24), 5655–5669.
Wei, A., & Chow-Fraser, P. (2007). Use of IKONOS Imagery to Map Coastal Wetlands of
Georgian Bay. Fisheries, 32(4), 164–173.
Weng, Q. (2012). Remote sensing of impervious surfaces in the urban areas: Requirements,
methods, and trends. Remote Sensing of Environment, 117, 34–49.
Whiteside, T., & Ahmad, W. (2005). A comparison of object-oriented and pixel-based
classification methods for mapping land cover of northern Australia. Proceedings of the
SSC2005 Spatial Intelligence, Innovation and Praxis: The National Biennial Conference
of the Spatial Sciences Institute, Melbourne., 1225–1231.
Wright, C., & Gallant, A. (2007). Improved wetland remote sensing in Yellowstone National
Park using classification trees to combine TM imagery and ancillary environmental data.
Remote Sensing of Environment, 107, 582–605.
Xu, B., & Gong, P. (2007). Land use/land-cover classification with multispectral and
hyperspectral E0-1 data. ISPRS Photogrammetric Engineering and Remote Sensing,
73(8), 955–965.
Yan, G., Mas, J. F., Maathuis, B. H. P., Xiangmin, Z., & Van Dijk, P. M. (2006). Comparison of
pixel-based and object-oriented image classification approaches—a case study in a coal
fire area, Wuda, Inner Mongolia, China. International Journal of Remote Sensing,
27(18), 4039–4055.
Yang, J., Li, P., & He, Y. (2014). A multi-band approach to unsupervised scale parameter
selection for multi-scale image segmentation. ISPRS Journal of Photogrammetry and
Remote Sensing, 94, 13–24.

59
Yang, J., Y. He, and Q. Weng. (2015). An automated method to parameterize segmentation scale
by enhancing intra-segment homogeneity and inter-segment heterogeneity. IEEE
Geoscience and Remote Sensing Letters, 12(6): 1282-1286.
Yu, Q., Gong, P., Clinton, N., Biging, G., Kelly, M., & Schirokauer, D. (2006). Object-based
Detailed Vegetation Classification with Airborne High Spatial Resolution Remote
Sensing Imagery. Photogrammetric Engineering & Remote Sensing, 72(7), 799–811.
Zhang, Y., Guindon, B., Cihlar, J. (2002) An image transform to characterize and compensate for
spatial variations in thin cloud contamination of Landsat Images. Remote Sensing of
Environment, 82, 173-187.
Zomer, R. J., Trabucco, a., & Ustin, S. L. (2009). Building spectral libraries for wetlands land
cover classification and hyperspectral remote sensing. Journal of Environmental
Management, 90(7), 2170–2177.

60
Chapter 3
Modelling seasonal wetland habitat suitability for Blanding’s turtles (Emydoidea blandingii) using optical satellite remote
sensing imagery
Introduction
An animal’s ability to adjust to changes in its environment is a testament to evolutionary
adaption and species resilience (Gotthard & Nylin, 1995). This is especially true for species
whose distribution falls across temperate latitudes that undergo significant seasonal changes.
Changes to intra annual habitat preference and use are driven by changes in environmental
factors such as shifting food resources (Nielsen et al., 2010; Wallace, 2006), fluctuating water
availability (Humphrey & Zinn, 1982), and seasonal climate (Millar & Blouin-Demers, 2011).
Behavioural characteristics may also act as strong drivers which alter the way an animal uses the
environment. Behaviours driven by reproduction were found to seasonally alter use of habitat
such as the defence of larger territory in Lesser Spotted woodpeckers (Dendrocopos minor)
(Wiktander et al., 2001) and extensive movements by both mink and river otters during mating
season (Humphrey & Zinn, 1982). In Cutthroat trout (Oncorhynchus clarki) competition with
other species is thought to be responsible for the abandonment of larger pools in the spring
(Heggenes et al., 1991).
In species habitat modelling, traditional approaches use environmental predictors representing a
single snapshot in time, resulting in habitat maps that imply a static environment. However, the
boundaries of species’ ranges are probabilistic entities, and they shift in space and time (Fortin et
al., 2005). In circumstances where habitat needs vary according to time of year, such snapshot
habitat maps are not appropriate for making decisions on land development, policy, or for setting
conservation priorities. Remote sensing (RS) science is a rapidly-advancing field and provides a
wealth of data capable of increasing the spatio-temporal resolution of species occurrence models.
This is particularly true of satellite data with vast archives (e.g. Landsat continuity mission)
allowing studies to extrapolate into the past and identify trends. The use of satellite imagery is
not new to species distribution modelling and has been used to predict the preferred habitat for
grizzly bears (Franklin et al., 2002; Linke et al., 2005), birds (Osborne et al., 2001; Melles et al.,

61
2011; Shen et al., 2013), ungulates (Leimgruber et al., 2001), and marine turtles (Hays et al.,
2001; Kelle et al., 2007; Wabnitz et al., 2008). In fact, the field of conservation biology was
revolutionized during the 1990’s when satellite-derived data became widely available, resulting
in a dramatic increase in both the scope and amount of species distribution studies conducted
(Rushton, Merod, & Kerby, 2004). However, the wealth of information that can be derived from
remote sensing imagery is not often fully exploited for use in species distribution models nor
used to provide biologically relevant answers to pressing conservation questions. Land cover
maps are the most often used remote sensing product in species distribution models (Miller,
2010), however maps are often created for multiple purposes by third-party government or non-
government organisations, and may not necessarily match the scale of observation or land cover
types relevant to the target species physiological and behaviour needs. Moreover, the use of
spectral values and vegetation indices as environmental predictors are not commonly employed
for use in habitat models for species other than birds (Gottschalk et al., 2005; Miller, 2010),
despite the wealth of biophysical information they can provide. Possibly one of the most
important characteristics of satellite imagery is the multi-temporal feature of space-borne sensors
which can not only allow studies to extrapolate into the past using archived imagery, but also
provide ongoing repeat coverage over the same ground location across a range of temporal
scales, allowing us to identify patterns, trends, and changes in habitat.
This study used environmental variables derived from multi-temporal satellite imagery, and
seasonal high spatial resolution land cover maps, to predict suitable habitat for a threatened
freshwater turtle, which represents a globally declining taxon. The Blanding’s turtle (Emydoidea
blandingii) is a medium-sized turtle whose primary geographic distribution covers portions of
southern Ontario, and Quebec as well as some states in the north, central and eastern United
States where they are considered at-risk in the majority of the political boundaries in which they
occur (NatureServe, 2010). They inhabit all wetland types containing shallow open water and
abundant vegetation, while uplands and lotic (fast-flowing) habitats are generally avoided (Edge,
Steinberg, Brooks, & Litzgus, 2010; Paterson, Steinberg, & Litzgus, 2014; Ross, Anderson,
Journal, & Mar, 1990), except during nesting migrations when uplands are used extensively
(Congdon, Kinney, & Nagle, 2011). On a microhabitat scale, Blanding’s turtles have been
associated with emergent and floating aquatic vegetation (Hamernick, 2000; Millar & Blouin-
Demers, 2011), submergent vegetation (Edge et al., 2010), cold waters and bog mats (Millar &

62
Blouin-Demers, 2011), floating logs (Barker & King, 2012), permanent pools (Joyal,
McCollough, & Hunter, 2001), soft organic substrates and an abundance of sedge tussocks and
muskrat mounds (Pappas & Brecke, 2009). While wetland ecosystems can change rapidly
throughout a single season, Blanding’s turtle movement, activity, and physiological needs also
demonstrate cyclical shifts in habitat selection related to foraging, and mating, nesting, and the
onset of hibernation (Beaudry, deMaynadier, & Hunter, 2009; Edge et al., 2010). Declining
across much of their range, Blanding’s turtles suffer pressures from pervasive habitat loss, and
degradation, as well as increased mortality of nesting females due to road barriers fragmenting
the landscape (Beaudry et al., 2008; Steen et al., 2006). Alongside the trend of decline in turtle
species worldwide, global wetland loss also continues without apparent abatement despite
increased awareness of their importance over the last century (Brock, Smith, & Jarman, 1999)
and the association of many declining species with these ecosystems.
The aim of this study was to investigate whether turtles select habitat based on different
characteristics throughout the year, and if this difference could be captured by remote-sensing
based modelling. To achieve this objective, habitat models were developed over two study areas
at two different periods during the active season, related to significant changes in both
physiological and behavioural needs of Blanding’s turtles as well as changes to wetland
hydrology and vegetation communities. This ability is tested across two landscapes varying in
alteration due to human-related activities. The effectiveness, and versatility of boosted regression
trees (BRT) and logistic regression in correctly identifying Blanding’s turtle preferred habitat
was also compared. Results are evaluated in the context of strengths and limitations of this
approach for threatened species conservation planning.

63
Materials and Methods
3.2.1 Study Area
This study was conducted in two locations in Ontario, Canada, (Figure 3-1) representing a
relatively undisturbed landscape in Algonquin Provincial Park (hereafter referred to as the park
site), and a landscape highly disturbed by human farming and settlement activities located in
Brant County (hereafter referred to as the agricultural site). The park study site was located in the
northeast corner of Algonquin Provincial Park, which encompasses 7,630 km2 in its entirety
including approximately 340 ha of wetlands of all classes as defined by the Canadian Wetlands
Classification System (NWWG, 1997).
Figure 3-1. Study regions in a (a) relatively undisturbed park landscape in Algonquin
Provincial Park, and (b) a fragmented agricultural landscape in Brant County. Images
acquired from (a) GeoEye1 on May 25, 2013 and (b) WorldView2 on April 9, 2012.

64
Logging activity occurs in the study area as well as recreational use by park visitors, though the
study site was located in a less heavily visited section. The agricultural site was located in the
County of Brant in southwestern Ontario and supports a population of ~35,000 people.
Provincial and private roads bisect the agriculturally dominated landscape and surround the
Oakland Swamp, an 890 ha wetland of provincial significance as determined by the Ontario
Wetland Evaluation System (OWES, 2002); a designation which precludes development and site
alteration. Several smaller wetlands of variable size and shape were also distributed throughout
the study area.
3.2.2 Satellite Imagery
Four satellite images from WorldView-2 and GeoEye-1 sensors were acquired for developing
seasonal remote-sensing based environmental predictors. Both high spatial resolution sensors
capture data across multiple spectral regions (red, green, blue, and near infrared) (Table 3-1).
Four images were acquired over each study site, and across two seasons during the spring (April-
May) and late summer (September). High spatial resolution sensors were selected to match the
habits of the study species, which utilizes a relatively small home range compared to mammals
and birds, and therefore required image data capable of resolving fine details. Satellite images
were geometrically and radiometrically corrected using PCI Geomatica version 2014. Geometric
correction achieved an accuracy of 2 pixel RMSE (root mean square error) or better, representing
approximately 4 m error on the Earth’s surface. Atmospheric correction was completed using the
ATCOR2 top of the atmosphere reflectance calibration algorithm (Richter et al. 2006; Richter,
1996; Zhang et al. 2002). All images were projected to the Universal Transverse Mercator
(UTM) system (zone 17).

65
Table 3-1. Summary of satellite imagery acquired over study sites and temporal periods
examined in this chapter
Specifications Park Site (Algonquin Park) Agricultural Site (Brant County)
Acquisition Date 25 May 2013 12 Sept 2012 9 April 2012 5 Sept 2013
Sensor GeoEye1 GeoEye1 WorldView2 WorldView2
Nominal Ground
Pixel Size (m)
1.84 m multispectral
Spectral
Bandwidth
Blue (450-510nm)
Green (510-580nm)
Red (630-690nm)
Near infrared (770-895nm)
Blue (450-510 nm)
Green (510-580nm)
Red (655-690nm)
Near infrared (780-920nm)
Radiometric
Quantization
16 bits
16 bits
3.2.3 Study Population & Telemetry Data
Locational data from a subset of two populations of adult Blanding’s turtles were obtained from
ongoing radio-telemetry studies conducted by research partners from Laurentian University and
the Metro Toronto Zoo. Turtles from the park site population (n = 17) were radio-tracked from
2006 to 2007, and from 2010 to 2011 for the agricultural site population (n = 20) throughout the
active season (April – September), and less frequently once turtles settled into their winter
hibernacula (October-November). Transmitters (Holohil models SI-2F, AI-2 and PD-2, Holohil
Inc, Carp, Ontario, Canada) were affixed to rear marginal scutes, and locations pinpointed using
a 3-element Yagi antenna and receiver (Lotek Suretrack STR-1000, Lotek Engineering Inc.,
Newmarket, Ontario, Canada; Telonics receiver, Telonics, Mesa, Arizona; Wildlife Materials
model TRX-1000S, Wildlife Materials Inc. Illinois, USA). Each study site accumulated a
minimum of 600 locations, which were recorded using a hand held GPS (positional accuracy
±5m), then partitioned by season. Telemetry data was not subsampled to account for spatial
autocorrelation as Fortin and Dale (2005) note that reduction of the dataset does not necessarily
remove the effect of autocorrelation, but only reduces the power to detect it, and it is in fact this
signal of serial correlation that habitat models attempt to detect. Cushman and Huettman (2010)
further assert that reducing the dataset to achieve a level of perceived statistical independence
incurs heavy costs in terms of information loss. A comparison of home range estimate using a

66
full and subsampled telemetry data found that the reduced dataset did not improve results, and
home range size and movement patterns were better represented by the full set auto correlated
observations (De Solla et al., 1999).
3.2.4 Temporal Partitioning
Changes in the behaviour and physiological needs of Blanding’s turtles during the active season
can be partitioned into periods corresponding with distinct activities. At the onset of the active
period (April-May), turtles emerge from hibernation, forage widely, bask often and search for
mates. During the late spring and mid-season summer (June-July), females leave wetlands in
search of terrestrial nesting sites. Towards the end of the summer and fall (July-October), turtle
activity and consumption is reduced and the onset of hibernation begins (Beaudry et al., 2009;
Edge et al., 2010). This timing is generally applicable across the extent of the Blanding’s turtle
range that falls within the latitudes of southern Ontario (44-45oN). For this study, each active
period was partitioned into two seasons; spring (April-June) and late summer (July-Sept) which
captured primary activities as well as major changes in wetland habitat. Nesting behaviour and
nesting habitat was not considered in this study as it represents a distinct temporal period limited
to the reproductively active female cohort which was not representative of the population. In
terms of the wetland habitat, spring corresponds with maximum inundation extent (Ozesmi &
Bauer, 2002) and early growth of wetland vegetation (Figure 3-2; a, c). As the season progresses
and temperature increases, water levels drop and precipitation decreases, while wetland
vegetation reaches its maximum coverage and gradually begins to senesce (Figure 3-2; b, d, e).

67
3.2.5 Environmental Input Variables
All candidate input variables were selected based upon ecologically meaningful habitat and
landscape characteristics for Blanding’s turtles, guided by existing literature and expertise gained
from field surveying. This species-centred approach endeavours to recognize that different
species perceive a landscape in different ways (Betts et al., 2014). In keeping with these
principles, three broad variables likely to affect habitat selection in Blanding’s turtles were
considered. Variables were categorised as (a) biophysical characteristics, (b) landscape-related
metrics (i.e., distance to landscape elements, proportion of land cover type) and (c) topographic
(elevation-related) variables (Figure 3-3). A preliminary field study was conducted to identify
significant biophysical variables correlated with habitat selection for Blanding’s turtles (see
following section 3.2.7) to target key variables to extract from multispectral remote sensing data.
Figure 3-2. Seasonal change in wetland vegetation and standing water in the park study area
(Algonquin Provincial Park) during the early spring (May; top left), and late summer (August;
top right), and the agricultural (Brant County) study area during the early spring (April;
bottom left), mid-season (June; bottom centre) and late summer (August; bottom right)..

68
Landscape variables were derived from land cover maps produced in Chapter Two, while
topographic variables were calculated from a provincial DEM product. The 10 m DEM was
produced by the Ontario Ministry of Natural Resources which was interpolated from a DTM
(digital terrain model), a contour map, spot height data, and a water virtual flow map to a ±10 m
vertical precision. Climatic data was not considered due to the smaller landscape scale of this
study, and because the inclusion of vegetation characteristics likely act as proxies for climate at a
more detailed resolution.
Figure 3-3. Workflow demonstrating source data, extraction of environmental input variables, and
development of final raster layers used in model building.

69
3.2.6 Pseudo-absence (Background) Sampling
Pseudo-absence or background locations were selected following two sampling schemes to serve
two different purposes. The first scheme was related to identifying significant field-based
biophysical data correlated with turtle presence. Pseudo-absence points were selected by
randomly choosing a direction and a distance within 90 m (+/- 10 m) of a turtle presence point
(Figure 3-4). The 90 m constraint represents the average daily movement of Blanding’s turtles
(Gibbs & Shriver, 2002) and ensured that random locations represented areas that were
accessible to the turtles and not remote locations where the species would not reasonably be
found. These pseudo-absence locations were created to allow comparison with biophysical
habitat data measured over presence points. A t-test comparison of means was used to determine
which biophysical habitat variables differed significantly between turtle and random points (e.g.
water depth at turtle presence locations representing habitat selected by the turtle, vs water depth
over random pseudo-absence points representing habitat (assumed) not to be selected by the
turtles). Field-based biophysical variables were measured over a total of 70 (±5) turtle
(presence) locations and 70 (±5) random (pseudo-absence) locations.
Figure 3-4. Sampling design for identification of significant biophysical variables correlated with
turtle presence. A subset of present points (blue circles) are selected from the pool of temporally
partitioned telemetry points (pink circles), and paired with a pseudo-absence point (yellow
circles) constrained to a 90m (± 10m) distance, any direction from the selected presence point.

70
The second pseudo-absence (background) sampling scheme was designed to sample the entire
study landscape by overlaying these points across all continuous raster inputs (Figure 3-3, far
right column), and was therefore not constrained to the 90 m limit of the biophysical sampling
scheme. Background points were generated across the entire study area using the Generate
Random Points tool in ArcMap (10.2) and stratified by the proportion of each land cover type to
determine the amount of background points to be generated (Barbet-Massin et al., 2012). A total
of 828 telemetry locations from the park site, and 688 points from the agricultural site were used
to represent presence points at each site, while background points were generated at a ratio of 1:2
for presence to pseudo-absence points (Figure 3-5). Background points were not excluded from
land cover types containing presence points to avoid arbitrary assumptions about what is
considered unsuitable habitat for the target species (Stokland, 2011). These sample points were
overlaid across all environmental input layers to build the dataset used for training the model.
Points were partitioned by season, with 15% withheld for validation.
Figure 3-5. Background points generated across study landscape (park site, spring)
and stratified by dominant landcover type shown as pink circles. Temporally
partitioned (spring) telemetry points show in blue circles.

71
3.2.7 Linking Biophysical Variables to Satellite Data
Identifying relevant biophysical variables associated with habitat selection. Biophysical habitat
characteristics such as water depth, temperature, or vegetation cover are important for defining
microhabitat selection, as they exist at a scale of observation most immediately relevant to the
animal. Yet this information is not often available in a spatially explicit format, and in many
cases variables that are most relevant to the study species are often the most data-poor (Aarts et
al., 2008), resulting in models being built from whichever datasets are available, rather than
those that are most biologically relevant. In this study, biophysical data related to water and
vegetation characteristics were obtained by linking field-measured data with satellite data using
multispectral indices as the independent (predictor) variable to extract the target biophysical
(response) data across the entire study area. The underlying assumptions were that: i) selected
variables displayed biophysical properties that were detectable by remote sensors (i.e., through
detectable variations in surface reflectance), and ii) these variables drive the distribution and
abundance of species across landscapes (Turner et al., 2003). Field measured biophysical
variables included vegetation and water characteristics such as percent vegetation cover, leaf
area index, water depth, dissolved oxygen and pH (see Table 3-2 for a complete list).
LAI (Leaf Area Index) was collected using an Accupar LP-80 probe (Decagon Devices, Inc.,
Pullman, WA, USA) held horizontally above ground level. Water chemistry variables were
measured using a YSI water quality sonde (Model 6820, YSI Inc., Yellow Springs, OH, USA)
placed directly above the surface of the wetland or aquatic water body. Measurements were
collected over 5 points within each 1.84 m quadrat (conforming to one pixel of the satellite
image) over each sample point, and averaged to represent the sampling point condition.
A t-test comparison of means was conducted to identify which variables significantly differed
between presence and pseudo-absence points and thus were associated with Blanding’s turtle
habitat preference. Highly correlated variables were eliminated, and those remaining were
extracted from the remote sensing image for the corresponding site and season. The null
hypothesis is stated as no difference between biophysical measurements over turtle (presence)
and random (pseudo-absence) points, indicating that turtles select habitat randomly. Based on the
results of the t-test, the null hypothesis was rejected as there was a significant statistical

72
difference between means of multiple habitat variables between turtle and random points
including percent vegetation cover, vegetation height, leaf area index, and water depth (Table 3-
3).
Table 3-2. List of biophysical variables measured over presence and pseudo-absence points at
the park site (Algonquin Provincial Park), and the agricultural site (Brant County study) during
the spring and summer seasons.
Variable Description
LAI
Leaf area index, a dimensionless measure of the one-sided green
leaf area per unit ground surface area
Emergent Vegetation Cover Percent (%) emergent vegetation cover estimated within a 1.84m
quadrat. Emergent refers to vertically-oriented vegetation for
which at least a portion of the plant exists above the surface of
the water.
Floating Vegetation Cover
Submergent Vegetation
Cover
Percent (%) floating vegetation cover estimated within a 1.84m
quadrat. Floating refers to horizontally-oriented vegetation
which sits across the surface of the water.
Percent (%) submerged vegetation estimated within a 1.84m
quadrat. Submerged refers to any vegetation that does not break
through the surface of the water.
Total vegetation cover Percent (%) total vegetation cover estimated within a 1.84m
quadrat; includes emergent and floating aquatic vegetation
Vegetation height Average maximum height of vegetation (cm)
Water depth Average water depth (cm)
Water temperature Water temperature (Celsius); collected at bottom substrate level
which represents where Blanding’s turtles would be found at
rest.
Dissolved oxygen A measure of the amount of dissolved oxygen in the water
(mg/L); collected at bottom substrate.
Specific conductivity A measure of the amount of dissolved solids (e.g. salt) in the
water (S/cm3)
pH A measure of the acid and base chemistry of water

73
Blanding’s turtles were found to select sites with greater vegetation cover, LAI, and height
compared with random points during the early spring season, while late summer selection
corresponded with selection of different water depths at each site. Shallower water was selected
by turtles in the park site during the late summer which is likely a result of the large lake
connected to many of the wetlands in the study area. Since deeper water was available year
round, the turtles had a wider range of depths to utilise. Therefore, relative to what was available,
turtles selected shallower regions Conversely, at the highly disturbed agricultural site, there was
no comparable body of water available, and open deeper water was restricted to creeks and
irrigation ponds. During the late summer, water depth selection by turtles was confined to deeper
depths relative to what was available. The smaller size of wetland and aquatic bodies at the
agricultural site may also relate to higher overall water temperatures, which could explain why
turtles utilised deeper, and thus cooler waters to regulate body temperature.
Table 3-3. Summary of significant biophysical variables identified through a t-test
comparison of means between biophysical measurements at observed turtle presence points
and random pseudo-absence points (random values in brackets). Based on 70±5 total sample
points for each variable at each site and each season.
Park site (Algonquin Provincial Park)
Variable
Mean
Std. Error
Mean
p*
Spring Percent vegetation
cover†
51.52 (27.04) ±4.82 (±7.13) 0.009
Late
Summer
Vegetation height (cm)†
Leaf area index
73.62 (48.97)
0.63 (0.01)
±5.66 (±7.89)
±0.12 (±0.00)
0.013
0.000
Water depth (cm) † 16.31 (37.27) ±2.68 (±8.17) 0.003
Agricultural site (Brant County)
Spring Vegetation height (cm) 76.96 (31.79) ±12.59 (±8.05) 0.007
Vegetation cover (%)† 78.66 (43.88) ±4.62 (±7.85) 0.000
Leaf area index 0.93 (0.11) ±0.18 (±0.06) 0.001
Late
Summer
Water depth (cm)†
96.06 (56.93)
±15.26 (±12.46)
0.041
† selected variables for model building
*significance value between observed (presence) and random (pseudo-absence) points

74
Extracting significant biophysical variables from satellite data. The normalized difference
vegetation index (NDVI) was extracted from satellite imagery and used to establish a
relationship with identified vegetation parameters (from Table 3-3). Leaf area index did not
demonstrate a robust relationship with NDVI and was not retained for use particularly as
equivalent information was provided by other variables such as percent vegetation cover. In
cases where more than one vegetation variable was identified as significant by the t-test, a
muticollinearity test was employed to identify and discard highly correlated biophysical
variables. NDVI is a widely-used indicator of live green vegetation that uses the reflectance (ρ)
of the visible (red) and near-infrared bands of the electromagnetic spectrum to estimate
vegetation characteristics (Rouse et al., 1974):
���� =ρnir − ρred
ρnir + ρred
NDVI values range from -1 to 1, where higher NDVI values indicate a greater coverage of
photosynthetically-active vegetation, while values less than zero typically do not have any
ecological meaning. An NDVI layer was created from the red and near infrared bands of the
satellite data, and values over sample points were extracted and input into a linear regression
model with field-measured vegetation parameters as the dependent variable.
Water depth was derived from remote sensing imagery using the relative water depth algorithm
developed by Stumpf, Holderied and Sinclair (2003) and given by the equation:
Where, Rw is the above surface water reflection, Lw is the water-leaving radiance, Ed is the
downwelling irradiance entering the water, and � represents each of the spectral bands. Rw is
found by correcting for the total reflectance (aerosol, surface reflectance, and Rayleigh
scattering) using the blue and near-infrared bands, and is therefore applied to the non-
atmospherically corrected satellite image. The algorithm was implemented in ENVI version 5.1
(Exelis Visual Information Solutions, Boulder, Colorado) which outputs a spatial map of
continuous relative water depth values (range 0-1). Relative water depth values (predictor
variable) were extracted at field-sampled locations, and regressed with field-measured data
(response variable) to build the regression model.
�� =���(�)
��(�)

75
3.2.8 Calculating Landscape Metrics
Land cover maps are the most often used remote sensing product in species distribution models
(Miller, 2010), yet maps acquired from secondary sources can result in products that may not
accurately reflect the spatial and temporal scale, nor the actual land cover types appropriate to
the target species. To illustrate this point, the third-party provincial land cover map available
over the study areas was created from 30m Landsat data and only included wetlands as one
general class, which would homogenize much of the variation important in capturing habitat
selection. To overcome this issue, land cover maps were produced in Chapter Two using
categories relevant to Blanding’s turtle biology and behaviour. Land cover maps were developed
for the early spring and late summer period to capture dramatic changes in wetland vegetation
composition which represents preferred habitat for Blanding’s turtles (Figures 3-6 and 3-7).
Figure 3-6. Change in wetland composition, vegetation extent, and available standing
water across the spring and late summer periods over the park site. Land cover maps were
developed from high spatial resolution GeoEye1 imagery during the spring (May 2013;
top) and late summer (September 2012; bottom).

76
Four classes of wetlands were categorized according to the Canadian Wetland Classification
System (NWWG, 1997) including marsh, swamp, fen, and bog. Preferred marsh wetland habitat
was further classified into emergent and wet meadow categories to reflect dominant vegetation
community types potentially related to habitat selection. Over the agricultural site, bare and full
canopy crop fields were classified separately to reflect the species-eye view of the landscape
(i.e., turtles may utilise exposed habitats very differently from areas with full canopy coverage).
Roads present a major landscape barrier to most turtles (Gibbs & Shriver, 2002; Congdon et al.,
1993) and were classified independently from other built features such as residential properties.
The latter were grouped into ‘parcels’ which included residences, driveways, lawns, and other
common elements of suburban domiciles. This grouping reflected the relative risk or aversion
that may be associated with habitat use near areas of increased human activity.
Figure 3-7. Change in wetland composition, vegetation extent, and available standing
water across the spring and late summer periods over the agricultural site (subsets). Land
cover maps were developed from high spatial resolution WorldView2 imagery during the
spring (April 2012; top) and late summer (September 2013; bottom).

77
Metrics based upon these targeted land cover maps were obtained from GIS environments. The
distance to a particular land cover type was measured using the Near tool in ArcMap 10.2 (ESRI,
2011, Redlands, CA). The proportion of a land cover type within a 90 m radius buffer around
sample points was extracted using the isectpolyrst tool in Geospatial Modelling Environment
(Beyer, 2012). A circular buffer of 90 m radius was selected to reflect the average daily
movement of Blanding’s turtles (Gibbs & Shriver, 2002). Distance and proportion metrics were
compiled from seasonally partitioned telemetry points and randomly generated background
points (see section 3.2.9 Presence and Pseudo-Absence Sampling).
3.2.9 Extracting Topographic Data
Blanding’s turtles are a semi-aquatic species, yet aside from nesting forays by gravid females,
and occasional dispersals by adults, individuals spend the majority of their time in wetlands.
During terrestrial travel, they tend to prefer low-lying areas and avoid steep rises and higher
elevations (B. Johnson, pers comm). For this reason, environmental variables (Table 3-4)
including slope, aspect, and topographic wetness index (TWI) were also included as initial model
inputs. TWI, also called compound topographic index (CTI), describes the propensity of a
location for saturation given the contributing area and local upslope values (Beven & Kirby,
1979). Higher TWI values represent (wetter) drainage depressions, while lower values represent
(dryer) crests and ridges. A TWI raster was produced from the provincial DEM layer according
to the equation:
��� = ln(�
tan �)
where a is the upstream (or catchment) contributing area in m2 and β is the slope in degrees. As
the topographic information at each site does not differ between seasons, one common layer was
used at each study site to characterize the two seasons. Results were normalized to a range of 0-
100.

78
Table 3-4. Summary of landscape and topographic derived variables used as model inputs
Source Data Variable Description
Land cover
Map
Distance
Proximity to the nearest land cover type (m)
Proportion
land cover
Proportion of land cover type within a 90m buffer
around sample points
Digital
Elevation
Model
Elevation
Slope
Height (m) above sea level
A measure of the steepness of a change in elevation
(degrees)
Aspect
A measure of the compass direction that a slope faces
(degrees)
TWI Topographic wetness index; a measure of the wetness
of an area based upon flow accumulation and the total
catchment area.
3.2.10 Models and Model Fitting
Boosted regression trees combine two powerful statistical techniques of boosting, a type of
ensemble machine learning, and regression trees which are models that relate a response to their
predictors by creating a binary split similar to the branching of a tree (Elith et al., 2008; Jafari et
al., 2014). Unlike other decision-tree methods which produce a single top model, boosting
merges the results of numerous simple trees which collectively boost the overall predictive
performance of the model compared to any one single tree (Elith et al., 2006; Jafari et al., 2014).
The final ensemble model is used to predict, and map the probability of species occurrence.
Despite its relative infrequent use in ecology, BRT demonstrates strong predictive performance
and consistent identification of relevant predictors and pairwise interactions while providing
simple numerical interpretations of complex relationships (De'ath, 2007; Elith et al., 2008).
BRT modelling was implemented through the gbm package (Ridgeway, 2006) and the gbm.step
package (Elith et al., 2008) within R (R Development Core Team, 2014). Following the
recommendations of Elith, Leathwick, and Hastie (2008) for determining appropriate settings for
model fitting options, an exploratory analysis was conducted on an independent test set to
identify the following settings. A Bernoulli distribution was utilised which is a discrete
distribution having two possible outcomes of success (1) or failure (0) of whether a specified

79
event occurs (in this case, turtle presence or absence). A tree complexity of 5 was employed,
which controls the allowable level of interaction among variables. Bagging fraction which
controls the amount of training data randomly selected for building each tree was set to 0.5 (i.e.,
50% of the training dataset was randomly selected during each repeated cross-validation step).
The learning rate controls the speed of the algorithm with lower learning rates corresponding to a
more stable reduction in prediction error (Elith et al., 2008). In all cases, the learning varied
slightly between 0.0075 and 0.01 and was adjusted to reach for a minimum of approximately
1000 trees as recommended by Elith et al. (2008).
To compare with BRT results, binary logistic regression models were also fitted using the same
training data over the park study site. Logistic regression uses the simple maximum likelihood
approach to fitting models (Wintle & Bardos, 2006) and is built around predicting probabilities
(the odds ratio) using a logit link where a perfect relationship falls along an S-shaped curve
rather than a straight line as in linear regression. Unlike BRT models, the logistic regression
output includes a single model equation which is established using a forward step-wise approach.
While BRT has been used often in other disciplines but is relatively new to ecology (Elith et al.,
2008), logistic regression models are one of the most widely used modelling approach for
mapping species distribution (Rushton et al., 2004), and have been used to map habitat for
mountain caribou (Johnson et al., 2004), wolves (Mlandenoff et al., 1995), wood turtles
(Compton et al., 2002), and rattlesnakes (Moore & Gillingham, 2006). In BRT models, the top
seven variables were retained in order to provide a fair comparison of predictive power
compared to variables selected by the logistic regression models. A top model type was selected
and applied to the second Brant County agricultural study site.
3.2.11 Evaluation and Evaluation Criteria
Model performance was evaluated using an independent test set created by a random hold-out of
15% of the total telemetry points from each population in each season. BRT model performance
was assessed using measures of specificity, sensitivity, and the Area Under the Curve (AUC)
Receiver Operating Characteristic (ROC) value. Logistic regression model performance was
assessed using Nagelkerke’s pseudo-R squared value, and the model deviance. The contribution
of final predictors was compared using measures of relative influence for BRT variables, and
ROC plots for logistic regression variables. Final map accuracy was estimated by applying a

80
threshold value to the continuous probability of occurrence maps to define binary categories of
habitat and non-habitat. Map accuracy was then assessed by quantifying the proportion of
telemetry (presence) points overlapping with polygons defined as habitat. A sensitivity analysis
was performed using threshold values of 0.4 - 0.8 to assess their effect on map accuracy (see
Appendix B1).
Results
3.3.1 Regression Models in Biophysical Variable Estimation
Different biophysical variables were associated with habitat selection by Blanding’s turtles
during the spring and late summer seasons. NDVI was used as the explanatory variable for
vegetation biophysical parameters associated with turtle preference (percent vegetation cover and
vegetation height). Water depth was estimated from satellite imagery using the relative water
depth algorithm (Stumpf et al., 2003). Results of regression models are shown in Table 3-5. The
red and near infrared bands are used in the estimation of the vegetation variables using NDVI,
and all spectral bands are used in the estimation of water depth using the relative water depth
algorithm.
A cross-validation analysis, withholding one third of the dataset at each fold, was applied to test
the fit of the model to a rolling subset of the total sample points. RMSE was calculated to
compare relative error across each grouping and results demonstrate that no obvious outliers
were present in the dataset (Table 3-6) indicating that the model was not overfit and shows
general applicability across sampled data. All sampled data was therefore retained for model
building.

81
Table 3-5. Summary of regression models developed from field-measured biophysical
parameters and satellite-derived data for use in mapping target variables
Park site (Algonquin Provincial Park)
Biophysical variable
(response)
Multispectral
Index
(predictor)
Regression
Relationship
R2
p
Spring % Vegetation cover NDVI y = 117.46x + 9.0 0.77 < 0.01
Late
Summer
Vegetation height
Water Depth
NDVI
RWDA
y = 127.59x + 43.24
y = 129.03x + 10.72
0.63
0.56
< 0.01
< 0.05
Agricultural site (Brant County)
Spring % Vegetation cover NDVI y = 180.21x + 24.88 0.53 < 0.05
Late
Summer
Water depth (cm)
RWDA
y = 199.42x + 21.74
0.75
< 0.01
NDVI (Normalised Difference Vegetation Index)
RWDA (Relative Water Depth Algorithm, Stumpf et al., 2003)
Table 3-6. Accuracy assessment of regression models developed for biophysical
variable estimation #add units to RMSE
Study Site
Season Biophysical
Variable
(response)
RMSE
Park Site
(Algonquin Provincial Park)
Spring % Vegetation Cover
15.74
18.49
12.94
Late
Summer
Vegetation Height 23.08
25.26
24.803
Water Depth 35.31
25.85
29.13
Agricultural Site
(Brant County)
Spring % Vegetation Cover
15.89
18.96
17.02
Late
Summer
Water Depth 31.92
34.11
22.06

82
All biophysical variables listed in Table 3-5 were produced as a continuous raster depicting the
target parameter across the entire study area (see Appendix, Figures A1-5). Vegetation-related
maps (i.e., percent vegetation cover and vegetation height) generally represented vegetation areas
well with higher cover associated with forested regions, and lower coverage corresponding with
open water, bare crop fields, and logged regions. Water depth maps reflected logical assumptions
of shallower water near the edge of water bodies, and deeper water further from upland
boundaries, though some maps displayed an unexplained speckled appearance that was possibly
due to reflection over a non-smooth water surface at the time of image acquisition, or surface
vegetation. All continuous raster layers were used as inputs alongside landscape-related and
topographic layers used to build BRT and logistic regression habitat models.
3.3.2 BRT and Logistic Regression Model Results
Both models were tested over the park site and demonstrated strong predictive power in
discriminating between turtle presence and absence (Table 3-7). The BRT model for the spring
and late summer correctly predicted Blanding’s turtle presence and absence with an area under
the curve ROC value of 0.98 and 0.98 respectively. Values closer to 1 indicate high sensitivity
(correctly identifying species presence; true positives) and low specificity (false positives
calculated as 1-sensitivity), while values close to 0 represent no predictive power. Predictive
deviance, is a measure of the unexplained variance in the model, where lower values represent a
larger proportion of the variation in the data being explained by the model. Model predictive
deviance (0.32) was higher in the late summer, and slightly improved (0.26) in the spring model.
Logistic regression models produced Nagelkerke R2 values of 0.86 for the spring model, and
0.88 for the late summer.
Table 3-7. Comparison of model test statistics for the park study site (Algonquin
Provincial Park)
Model Type Test Statistic SPRING model FALL model
Boosted Regression Tree
AUC ROC
0.98
0.98
Logistic Regression
Nagelkerke R2
0.86
0.88

83
Each BRT model was dominated by one environmental predictor that contributed between 38 -
53% of the model power out of a total of 100% (Table 3-8). Percent emergent vegetation within
a 90 m average daily movement buffer (peremerg) contributed the strongest to model prediction
(38.83) early in the active season, while the proximity to wet meadow wetlands (distwmead)
demonstrated the strongest influence later in the active season (60.76). The logistic regression
equation for the spring is given by:
P = 1/1 + e –(27.19 – 0.154(x1) – 0.102(x
2) – 2.139(x
3) – 0.016(x
4) – 0.005(x
5) – 0.016(x
6))
while the equation for the late summer is denoted by:
P = 1/1 + e –(17.79 – 0.011(x1
) – 0.026(x2
) – 0.042(x3
) – 0.053(x4
) – 1.678(x5
) – 1.882(x6
) – 5.224(x10
))
Table 3-8. Comparison of response variables included in final models of habitat selection
developed for Blanding’s turtles of the park study site (Algonquin Provincial Park) in
Ontario, Canada (*p < 0.01).
PARK SITE (Algonquin Provincial Park)
Model Type
SPRING
FALL
Relative
Influence
Relative
Influence
Boosted
Regression
Tree
Percent (Emergent Veg)
Proximity (Water)
Land Cover Type
Proximity (Bog)
Proximity (Emerg Veg)
Elevation
Proximity (Upland)
38.83
11.82
11.31
6.89
5.68
5.34
4.91
Proximity (Wet meadow)
Percent (Wet Meadow)
Elevation
Proximity (Emergent Veg)
Proximity (Water)
Percent (Emergent Veg)
Land Cover Type
60.76
11.56
7.27
6.60
4.79
4.67
4.33
B
B
Logistic
Regression
Constant
Slope
Elevation
Land Cover (Forest)
Proximity (Water)
Proximity (Bog)
Proximity (Emerg Veg)
27.19*
-0.154*
-0.102*
-2.139*
-0.016*
-0.005*
-0.016*
Constant
Proximity (Water)
Vegetation Height
Proximity (Wet Meadow)
Elevation
Land Cover (Water)
Land Cover (Swamp)
Percent Bog
17.79*
-0.011*
-0.026*
-0.042*
-0.053*
-1.678*
-1.882*
-5.224*

84
3.3.3 Comparison of variable contribution
Variables related to emergent vegetation (percent or proximity) within a radius of average daily
movements for Blanding’s turtles was selected as a common predictor in both the BRT and
logistic regression models for turtles early in the spring at the park study site (Figure 3-8). Other
common predictor variables included the distance to water, bog, emergent vegetation, and
elevation. The logistic regression model further selected the distance to the nearest upland
variable.
Figure 3-8. Comparison of variable influence and contribution as habitat predictors for the park
study site (Algonquin Provincial Park). BRT variables are shown on the left as relative
influence and logistic regression on the right as ROC plots of each contributing variable. Lines
curving towards 1 on the sensitivity y-axis represent variables most capable of accurately
detecting turtle presence (true positives). Lines curving towards 1 on the 1-specificity x-axis
represent variables most capable of detecting turtle absence (true negatives). Diagonal line
indicates reference line for which variable provides no discriminatory power.

85
Later in the active season, proximity to wet meadow marshes was the strongest term in the BRT
model, and the percent of bog wetlands in a 90m radius was most important in the logistic
regression model. Elevation, distance to water, and wet meadow wetlands were common across
both late summer models. Despite some similarities in variable selection, and overall strong
model performance, the BRT model was selected due to a higher model accuracy (Table 3-7) and
greater model interpretability. Coefficient values for all logistic regression variables were
relatively low and it was difficult to decipher the contribution of each selected explanatory
variable. Further, the selection of the forest class in the spring logistic regression model is
unsupported by field data or existing knowledge on physiological and behavioural needs of
Blanding’s turtles, who were rarely found in this land cover class except during travel. Late
summer model selection of the swamp land cover class, and the percentage of the bog class also
seemed to be a poor fit as turtles were found most often in marsh (emergent/wet meadow)
wetlands. Based on these conclusions, BRT modelling was subsequently applied to the
agricultural study site (Table 3-9).
Table 3-9. Response variables included in final BRT models of seasonal habitat selection for
Blanding’s turtles of the agricultural study site (Brant County), Ontario, Canada.
AGRICULTURAL SITE (Brant County)
Model
Type
SPRING
FALL
Relative
Influence
Relative
Influence
Boosted
Regression
Tree
Proximity (emergent veg)
Elevation
Proximity (water)
Land cover type
Proximity (road)
Percent (forest)
Proximity (wet meadow)
76.18
10.31
8.62
1.58
1.20
1.10
1.01
Percent (emergent veg)
Land cover type
Proximity (emergent veg)
Percent (wet meadow)
Elevation
Proximity (wet meadow)
Proximity (forest)
47.42
25.96
8.52
6.19
5.11
4.38
2.42
Similar to the relatively undisturbed park study site, environmental variables related to emergent
vegetation, elevation, and water were also selected for the fragmented agricultural study site.
Proximity to emergent vegetation was the strongest predictor by a wide margin, followed by
elevation and proximity to water. The late season model selected variables tending towards the
two dominant marsh communities (emergent vegetation and wet meadow), as well as elevation,

86
land cover type and proximity to forest. The proportion of emergent vegetation within a radius of
average daily movement was the strongest contributor followed by land cover type.
3.3.4 BRT model comparison
The four final BRT models were tested using 15% holdout validation points and all showed a
strong discriminatory ability in predicting the probability of Blanding’s turtle presence and
absence. Park study site models produced an area under the curve ROC value of 0.98 for the
spring and late summer seasons respectively, while agricultural site models demonstrated an
even stronger predictive power at 0.99 for both seasons (Figure 3-9). Predictive deviance was
lower in the agricultural site models in both the spring (0.19) and late summer (0.19) compared
to deviance form the park site in the spring (0.26) and summer (0.32).
Figure 3-9. BRT model results over the park study site (Algonquin Provincial Park) and
the agricultural (Brant County) study site, over both spring and late summer seasons.
Bars depict the area under the curve receiver operator characteristic value. Orange line
displays model predictive deviance.

87
The effect of a predictor on the dependent variable can be visualized by plotting fitted or partial
dependence functions which show the effect of a variable on the response. While these graphs
account for the average effects of all other variables in the model, they are not a perfect
representation but rather a basis for general interpretation (Elith et al., 2008). Responses for the
seven retained model variables indicate that at the start of the active season, Blanding’s turtles
occur in locations with a higher proportion of emergent vegetation, in close proximity to water,
uplands, emergent and bog wetlands (Figure 3-10, left). As wetlands in our study sites were
generally small, proximity to uplands was likely a results of this spatial characteristic (i.e. being
in a wetland is generally always close to uplands). They also occur more frequently at lower
elevations. Later in the season, partial dependence plots indicate that Blanding’s turtles still
occur in close proximity to water, and emergent aquatic vegetation, but also select areas near to
wet meadow marshes and areas which have a greater proportion of wet meadow and emergent
vegetation (Figure 3-10, right). Further, late season occurrence is associated with a strong
positive response towards lower elevations, as was mirrored in the spring model, but now a
strong negative response or avoidance of high elevation areas is also demonstrated for the late
summer model.
Partial dependence plots of environmental variables in the agricultural study site demonstrate
some subtle differences from the park population. Blanding’s turtles in this agricultural region
show a strong positive association with proximity to emergent vegetation and water, and a
similar but weaker association with proximity to wet meadow wetlands in the spring (Figure 3-
11, left). Unexpectedly, agricultural site turtles appear to select higher elevations and avoid lower
elevations. Lower forest cover is weakly avoided, and a complex response to roads is displayed.
Land cover types include a strong selection for wetlands and water, and a weak relationship with
forests while built areas, crop fields, and roads are avoided. Later in the season, agricultural site
turtles still occurred close to marsh wetlands, but also in areas with a higher percent of emergent
and wet meadow marsh vegetation (Figure 3-11, right). The same association with elevation
occurs, and there is a moderate selection for closer proximity to forests.

88
SPRING MODEL LATE SUMMER MODEL
Figure 3-10. Partial dependence fitted function curves for variables retained in final BRT models
for the park study site (Algonquin Provincial Park), spring model (left) and late summer model
(right). Relative influence values in brackets. Y axes are on a logit scale and centred to have a
zero mean over the data distribution. Graphed lines (or dashes) above 0 on the y-axis indicate
higher selection probability over the range indicated by the x-axis, while functions below 0 on
the y-axis indicate lower selection probability (avoidance) over the range indicated on the x-axis.

89
SPRING MODEL LATE SUMMER MODEL
Figure 3-11. Fitted function curves for predictors retained in final BRT models for agricultural
study site (Brant County) spring model (left) and late summer model (right). Relative influence
values in brackets. Y axes are on a logit scale and centred to have a zero mean over the data
distribution. Graphed lines (or dashes) above 0 on the y-axis indicate higher selection
probability over the range indicated by the x-axis, while functions below 0 on the y-axis
indicate lower selection probability (avoidance) over the range indicated on the x-axis.

90
3.3.5 Probability of occurrence maps
Model results were output to a raster map depicting probability of occurrence along a continuous
scale of 0 to 1.0 with the latter corresponding to regions of greatest suitability and thus highest
probability of occurrence (Figure 3-12).
Figure 3-12. Predicted potential probability surface for the occurrence of Blanding’s turtle
in the agricultural (Brant County) study area (left) and the park (Algonquin Provincial Park)
study area (right) developed using boosted regression trees. Seven final environmental
predictors were used in each model. Red areas indicate the highest probability of
occurrence.
3.3.6 Map accuracy
A binary threshold ≥ 0.6 was selected as best representative of Blanding’s turtle habitat with
regions equal to or above this value indicating suitable habitat, and values below 0.6
corresponding with unsuitable habitat (Figures 3-13 and 3-14; also see threshold sensitivity
analysis in Appendix Table B1). This value was deemed to be the most biologically accurate as it

91
closely aligned with borders of preferred wetland aquatic vegetation communities. Using all
telemetry data (partitioned by season), map accuracy was calculated as the percentage of points
correctly located within areas defined as suitable by the BRT binary models. Map accuracy was
high across spring models (> 90%) suggesting BRT models are especially robust during this
early period (Table 3-10). Accuracy decreased in later season models from both study sites with
the late summer park site binary map correctly capturing 87.8% of telemetry points within
suitable habitat, and the agricultural site BRT map correctly predicting 65.5%.
Table 3-10. Map accuracy statistics based upon all telemetry (presence) data
partitioned by season and overlaid against binary BRT maps set with
threshold value of 0.6. Map accuracy value represents the estimated
probability of occurrence of Blanding’s turtles.
Study Area Season Map accuracy (%)
Park Site
(Algonquin Provincial Park)
Spring
Late Summer
90.8
87.8
Agricultural Site
(Brant County)
Spring
Late Summer
94.1
65.5
Regions of suitable habitat in the park study site depict an overall reduction in suitable habitat
from the spring to late summer. Likewise, suitable regions in the agricultural site not only
diminished by late season, but demonstrated complete loss of some habitat patches by late
summer. The total area defined as habitat in the spring park site model was 1.17 square
kilometres (3.35% of total study area) , and had reduced to 1.06 square kilometres (2.97% of
total study area) by late summer, corresponding with a 9.57% reduction in habitat. Agricultural
site spring habitat covered 2.18 square kilometres (2.35% of total study area) in the spring, and
had contracted to 2.04 square kilometres (2.20% of total study area) by the late summer. This
corresponded with a 6.42% reduction in suitable habitat.

92
Figure 3-13. Threshold map based on habitat suitability ≥ 0.6 for the occurrence of
Blanding’s turtles in the park study area (Algonquin Provincial Park) during the spring
(top) and late summer (bottom) seasons with a map accuracy of 90.8% and 87.8%
respectively. Subset (at right) show pooled turtle presence locations plotted over binary
habitat map to demonstrate overlap with predicted areas.

93
Figure 3-14. Threshold map based on binary habitat suitability (≥ 0.6) for the
occurrence of Blanding’s turtles in the agricultural (Brant County) study area over the
spring (top) and late summer (bottom) seasons with a map accuracy of 94.1% and 65.5%
respectively. Subset (images on right) show pooled turtle presence locations overlaid
with predicted suitable habitat for each season. White circles indicate areas of suitable
habitat which have disappeared in the subsequent late summer season.

94
Discussion
This study began with an observation that Blanding’s turtles utilise their environment differently
depending on the time of year and the underlying mechanism, leading to an investigation into the
spatial and temporal dynamics of habitat use. Turtles are especially well-suited to multi-temporal
definitions of habitat due to shifting behavioural and physiological requirements, based in part on
an ectothermic lifestyle, as well as their dependence on freshwater wetlands which themselves
are characterized by recurring hydrologic fluctuations. This led to the development of seasonal
habitat models which demonstrated that suitable habitat does change across time. Therefore
remote sensing data, which can provide multi-temporal analysis of habitat, is critical in properly
assessing baseline habitat information needed for determining a species’ population health and
viability.
3.4.1 Biophysical Analysis
The biophysical input layers developed, represented field-measured variables corresponding to
turtle selection, and were derived from the same remote sensing imagery as landscape-derived
metrics of proximity and proportion of land cover type. While biophysical input layers were
modelled with an acceptable level of agreement with field-observed data, none contributed
strongly in final models which retained only the seven variables highest in predictive power. It is
possible that correlation with other predictors resulted in the attenuation of the biophysical
variable signal relative to all others. Water depth was expected to be highly significant, however,
proximity to uplands, and wetland classes such as emergent and wet meadow marshes, also
indirectly represent shallower waters which are preferred by Blanding’s turtles. Another possible
explanation is that the vegetation biophysical variables had a stronger signal within the wetland
habitat, and extrapolating to the entire study area may have reduced the strength of this signal. If
the investigation was constrained to areas within wetlands, it is likely that these biophysical
predictors would greatly increase in influence, and contribute more strongly to the models’
discriminatory power.
In all BRTs, the relative influence of the biophysical variables was low but still contributed to
the model. Some landscape category predictors such as the proportion of meadow, and barren
land within a 90 m average daily movement buffer did not contribute at all to model power. The
identification of variables that differed significantly between turtle and random points,

95
demonstrated that Blanding’s turtles select habitat based on different habitat variables during
different seasons. Results also confirm that these biophysical variables directly associated with
habitat selection, can be extracted from multispectral satellite data. Overall, the addition of
satellite-derived predictors has been found to be beneficial for modelling rare species when
compared with bioclimatic models (Zimmermann, Edwards, Moisen, Frescino, & Blackard,
2007) and thus should be considered in future modelling studies. Continuing work is necessary
to improve methods of biophysical feature extraction, and to identify the optimal scale for
inclusion into predictive models.
3.4.2 Satellite-derived predictors
While climatic and topographic data are more often used for predicting species distributions
(Bradley & Fleishman, 2008), such data are generally provided by third parties and at a
resolution too coarse for cryptic species such as reptiles and amphibians which respond to finer-
scale variations in their environment. Thus, it was not surprising that topographic information of
slope, aspect, and TWI, did not contribute strongly to any model. Yet interestingly, elevation was
retained as a top contributor in all final models. It is possible that at the landscape level, the
species overall preference for water and wetlands created a strong topographic signal that was
captured by the digital elevation model, despite the coarser (10 m) spatial resolution.
Landscape-level variables of proximity and proportion of a land cover type comprised the
majority of final predictors in each model, and were consistently associated with emergent and
wet meadow marshes across all landscapes and seasons. Several other studies have associated
Blanding’s turtle occupancy with these wetland components (Edge et al., 2010; Millar & Blouin-
Demers, 2011; Pappas & Brecke, 2009; Ross & Anderson, 1990) suggesting that the habitat
models developed in this study have captured general trends in habitat preference. It is important
to acknowledge that estimated errors identified from land cover maps produced in Chapter Two,
will impact variables derived from the final land cover products. The herbaceous upland class
demonstrated the lowest producer’s (0.57) and user’s accuracy (0.50) over the agricultural site
indicating that objects would have been misclassified as herbaceous upland (errors of
commission), as well as actual herbaceous upland objects that would have been classified as
another class (errors of omission). Fortunately, the majority of proximity and proportion-related
variables derived from these land cover maps in this current habitat suitability study, were

96
associated with emergent and wet meadow communities which were classified with a relatively
high accuracy ranging from 0.81-0.91 (PA) and 0.90-0.94 (UA). Still, a level of uncertainty
should be expected due to errors inherent to the mapping process. For future work, sensitivity
analyses should be conducted to better understand the impacts of mapping error on final habitat
suitability maps. Methods of improving classification accuracy should also be further examined
in order to minimize errors related to map-derived metrics.
The environmental predictors represent one out of a series of components which together make
up the predictive model. Efforts were made to ensure measurements of variables were both
representative of the population, time and space, but it is generally recognized that only in an
ideal world is the target species sedentary in locations that represent actual core habitat, and its
ecological requirements well known and measurable at the desired spatio-temporal scales
(Rushton et al., 2004).
3.4.3 Model comparison
While both the BRT and logistic regression approach performed well as models for ecological
forecasting, the BRT method allowed for easier interpretation of model terms and explanation of
interactions between terms. The ability to view the relative influence of each variable and to drop
those beyond a user-defined threshold was advantageous as was the fitted function graphs which
visually depict the relationship of each variable to the model outcome. Moreover, the
attractiveness of modelling techniques to conservation practitioners is in reality, affected by the
complexity (and availability) of the technique as well as the data required, and the BRT approach
is both widely available and relatively simple to implement.
3.4.4 Seasonal change
Our examination into the temporal shift in preferred habitat, demonstrated that turtles seek out
and utilise different environmental conditions throughout the year. This shifting selection
confirms the importance of temporal considerations in predictive habitat models, particularly for
species dependent upon rapidly changing ecosystems such as wetlands. Traditional habitat
models which present a single snapshot product may be missing out on important areas of habitat
that are needed at different times of the year. Landscape-related (distance, proximity, land cover

97
type) and topographic (elevation) predictors selected by the models did not differ remarkably
between seasons, but the majority of the change was captured by the seasonal land cover maps
which modelled the shift in the spatial distribution and extent of key wetland land cover types
(emergent marsh vegetation, wet meadow wetlands). Land cover maps depicted significant
transitions in wetland vegetation communities, particularly emergent and wet meadow marshes
which increased in coverage and density, in parallel with a decrease in open standing water as
the season progressed. The Blanding’s turtles dependence on open shallow water in the spring
will therefore shift spatially with availability as this association with water continues into the late
summer, but locations of remaining water change.
Wetlands reach their maximum inundation during the early spring after winter thaw, during
which time boundaries are clearly visible and wetlands are most easily classified (Ozesmi &
Bauer, 2002). This early leaf-off green-up period likely contributed to the higher map accuracy
achieved during the spring seasons over both study sites due to better visibility and subsequent
classification of wetlands. In the agricultural spring landscape, vegetation characteristics (height,
cover, and leaf area index) were identified as significant predictors during the early spring
season. This period corresponds with the start of the active period for Blanding’s turtles with the
onset of spring thaw and emergence from hibernation. During this time individuals forage widely
and search for mates as hydrologic connectivity is highest during this time of year. Blanding’s
turtles are opportunistic carnivores and animal prey (e.g. snails, crayfish, earthworms and
insects) typically comprises at least 85% of their diet with the remainder consisting of plant
matter (Rowe, 1992). Ephemeral wetlands hold abundant reservoirs of vegetation seed banks and
invertebrate eggs, that germinate and hatch with spring thaw and snowmelt (Gibbs, 1993; Zedler,
2003), while stands of floating, submergent and emergent macrophytes are often found in close
association with invertebrate communities (Voigts, 1976). Thus, wetland vegetation parameters
may act as a proxy for food resources. These ephemeral wetlands represent preferred sites for
foraging since they do not support larger aquatic carnivores (such as fish), allowing invertebrates
and larval amphibians to flourish in relative isolation (Semlitsch & Bodie, 1998). These
observations are supported by data from both sites which suggest that foraging behaviour, is
most likely the primary driver for early season selection of vegetation-related parameters by
adults, and also that the availability of water was not limiting at this time of year.

98
Conversely, late summer wetlands at both study sites were characterised by a decrease in water
availability and depth, and an increase in water temperature and vegetation growth which closed
early season aquatic passages. This reduction in open standing water, and increase in density and
extent of wetland vegetation probably contributed to the lower late summer map accuracy over
both study sites. Accurate wetland classification becomes challenging as the distinction between
wetland and upland boundaries blurs as water recedes and above ground vegetation thickens. The
mismatch between the timing of radio-telemetry observations, measurement of field biophysical
data, and satellite image acquisition also contributed to lower summer map accuracy for the
agricultural site due to a moderate drought experienced in southern Ontario in 2012. The earlier
spring months (April-June) were not largely affected, but the summer months (July-September)
experienced lower precipitation than normal, and higher average temperatures which would have
altered selection of habitat by Blanding’s turtles. However, this change in habitat selection was
not captured by the radio-telemetry data which had already been completed the year before.
Additional causes of the lower map accuracy across the agricultural late summer landscape could
be from hydrological modifications including pesticide and fertilizer run-off, and pumping for
crop irrigation that altered the natural timing of water fluctuations. Roads also likely negatively
affected the habitat quality of wetlands in this disturbed landscape through changes to hydrology
and water quality (Jones et al., 2000), introduction of chemical pollutants (Grant et al., 2003),
facilitation of the invasive species spread (Coffin, 2007), and an increase in human-induced edge
effects (Reed et al., 1996).
Physiologically, this late summer period represents a time of relative inactivity for Blanding’s
turtles, as mating and nesting activities have been completed and the relative abundance of
invertebrates has subsided. As ambient temperatures increase, the need to forage to sustain
metabolism and body temperature has decreased. Late summer also corresponded with the
maximum drying extent and for populations living in seasonal wetlands, permanent pools
become refuges for both adults and juveniles. Aestivation is a mechanism for coping with
wetland drying in freshwater turtles, and it involves the choice of remaining in a dried
environment and entering into a period of extended dormancy until the area re-floods (Roe and
Georges, 2008). While this strategy is sometimes practiced by smaller freshwater turtles such as
Painted turtles (Chrysemys picta), it is rare in Blanding’s turtles and has not been observed in the
northern (Edge et al., 2010) nor southern (Beaudry et al., 2009) range of their distribution. This

99
preference for aquatic habitats likely explains their close association with permanent pools in the
late summer (Joyal et al., 2001) as residency in these pools would reduce the risk of seasonal
drying. This dependency on water later in the active season, was mirrored by biophysical
measurements over both study sites which indicated that water depth was an important predictor
of late summer habitat. Aside from the prevention of desiccation, water also provides a medium
for thermoregulation, during the hot summer months. Previous studies on reptiles support the
selection of microhabitat based on structural and physical environmental characteristics that
affect thermoregulation (Rasmussen & Litzgus, 2010; Row & Blouin-Demers, 2006; Millar,
Graham, and Blouin-Demers, 2012).
3.4.5 Landscape Comparison
The role of landscape type on habitat availability was more complex. A greater overall decrease
in available habitat was expected by late summer in the agricultural site due to altered water
regimes resulting from intensified agricultural practices. While it has been documented that
overall wetland coverage in southern Ontario has been severely reduced from historic conditions
(Bardecki, 1982), less is known about wetland hydrological responses to anthropogenic
alterations at the landscape level. The argument has been made that wetlands in agricultural
landscapes have been subjected to water regimes that increase stability to be either continuously
wet or dry (Brock et al., 1999), which lead to a reduction in both the number and hydrological
diversity of wetlands in the landscape (Kath, LeBrocque, Miller, & Conservation, 2010).
Naturally occurring wetlands in the agricultural study site experienced extreme drying during the
late summer season resulting in some wetlands being completely devoid of any standing water
by August. However, man-made irrigation ponds retained water throughout the active season,
providing some form of refuge for turtles though conditions may not have been ideal. Combined
with water extraction for irrigation from both man-made ponds and natural wetlands, a practice
which itself is subject to local climate and rotating crop types, means that water-dependent
species in this area likely demonstrate a complex relationship with both the landscape and
ongoing agricultural practices. Telemetry data showed that turtles retreated to remaining areas of
deep water during the late summer, while a significant portion of wetland marsh habitats with
shallow open water during the spring season, experienced either complete or partial drying.
Further work examining the connectivity of the habitat nodes between preferred natural

100
wetlands, and irrigation ponds may yield important information on the permeability of the upland
matrix.
Conclusions
The use of satellite data proved to be highly valuable for building probability of occurrence (and
habitat suitability) maps for this threatened freshwater turtle species. Predictors derived from
species-centred land cover maps comprised the majority of selected model terms and
demonstrate that base information such as land cover can be highly informative if it matches the
scale and biology of the target species. Still further work using higher spatial or spectral
resolution sensors aboard airborne platforms may provide even clearer data on available habitat,
as well as locations of preferred nesting or hibernation habitat which could not be adequately
modelled by this study. Biotic relationships such as predation, or competition can also affect the
target species use of the habitat, but were not explicitly considered in this study. The inclusion of
co-occurrence data, if available, would more closely represent the realized niche of the study
species (Betts et al., 2014) as previous work has found that direct or indirect interactions between
turtle species may affect assemblage structure (Bodie et al., 2000).
The temporal shift in preferred habitat draws attention to the dynamic relationship between
species and landscapes over time. Drivers of such change include abiotic factors of both natural
and anthropogenic origins such as farming practices, and increased evaporation of water during
the summer, as well as biotic factors such as the behaviour and physiological needs of
Blanding’s turtles. Future studies therefore, should incorporate a multi-temporal approach to
mapping species occupancy. The cost of satellite remote sensing imagery may deter public land
management or non-profit conservation agencies from its use, however the cost is still
significantly lower than field surveying or aerial photographs (see Wei and Chow-Fraser, 2007
for a cost breakdown) and the advantages provided by multi-temporal analysis are significant
enough to justify the costs. For large mammals and wide-ranging avian species that operate at a
larger spatial scale of observation, publically available multispectral (30 m) Landsat data is
available at no cost and can provide a viable alternative to commercial high spatial resolution
imagery. Since neither plants, animals, nor the abiotic components of ecosystems are invariable
in space or time, it is important to consider alternatives to traditional static environment habitat
maps to better model the dynamic nature of Earth’s biodiversity.

101
References
Aarts, G., MacKenzie, M., McConnell, B., Fedak, M., & Matthiopoulos, J. (2008). Estimating
space-use and habitat preference from wildlife telemetry data. Ecography, 31(1), 140–
160.
Barbet-Massin, M., Jiguet, F., Albert, C. H., & Thuiller, W. (2012). Selecting pseudo-absences
for species distribution models: How, where and how many? Methods in Ecology and
Evolution, 3(2), 327–338.
Bardecki, M. J. (1982). The status of wetlands in southern Ontario. Wetlands, 2, 262–270.
Barker, R., & King, D. J. (2012). Blanding’s turtle (Emydoidea blandingii) potential habitat
mapping using aerial orthophotographic imagery and object based classification. Remote
Sensing, 4(1), 194–219.
Beaudry, F., deMaynadier, P. G., & Hunter, M. L. (2009). Seasonally Dynamic Habitat Use by
Spotted (Clemmys guttata) and Blanding’s Turtles (Emydoidea blandingii) in Maine.
Journal of Herpetology, 43(4), 636–645.
Betts, M.G., Fahrig, L., Hadley, A.S., Halstead, K.E., Bowman, J., Robinson, W.D., Wiens, J.A.,
& Lindenmayer, D.B. (2014). A species-centred approach for uncovering generalisties in
organism responses to habitat loss and fragmentation. Ecography, 37, 517-527.
Beven, K. J., & Kirby, M. J. (1979). A physically based variable contributing area model of
basin hydrology. Hydrological Sciences-Bulletin, 24, 43–69.
Beyer, H.L. (2012). Geospatial Modelling Environment (Version 0.7.3.0),
http://www.spatialecology.com/gme.
Bradley, B. a., & Fleishman, E. (2008). Can remote sensing of land cover improve species
distribution modelling? Journal of Biogeography, 35(7), 1158–1159.
Brock, M. A., Smith, R. G. B., & Jarman, P. J. (1999). Drain it , dam it : alteration of water
regime in shallow wetlands on the New England Tableland of New South Wales ,
Australia. Wetlands Ecology and Management, 7, 37–46.
Coffin, A. W. (2007). From roadkill to road ecology: a review of the ecological effects of roads.
Journal of Transport Geography, 15(5), 396-406.
Compton, B. W., Rhymer, J. M., & McCollough, M. (2002). Habitat selection by wood turtles
(Clemmys inscultpa): an application of paired logistic regression. Ecology, 83(3), 833–
843.
Congdon, J. D., Kinney, O. M., & Nagle, R. D. (2011). Spatial ecology and core-area protection
of Blanding’s Turtle (Emydoidea blandingii). Canadian Journal of Zoology, 89(11),
1098–1106.
Congdon, J. D., Dunham, A. E., & van Loben Sels, R. C. (1993). Delayed Sexual Maturity and
Demographics of Blanding's Turtles (Emydoidea blandingii): Implications for
Conservation and Management of Long‐Lived Organisms. Conservation Biology, 7(4),
826-833.
Cushman, S. A., & Huettmann, F. (Eds.). (2010). Spatial complexity, informatics, and wildlife
conservation. Tokyo: Springer.

102
De'Ath, G. (2007). Boosted trees for ecological modelling and prediction. Ecology, 88(1), 243-
251.
De Solla, S., Bonduriansky, R., & Brooks, R. J. (1999). Eliminating autocorrelation reduces
biological relevance of home range estimates. Journal of Animal Ecology, 68(2), 221-
234.
Edge, C. B., Steinberg, B. D., Brooks, R. J., & Litzgus, J. D. (2010). Habitat selection by
Blanding’s turtles (Emydoidea blandingii) in a Relatively Pristine Landscape.
Ecoscience, 17(1), 90–99.
Elith, J., Graham, C. H., Anderson, R. P., Dudık, M., Ferrier, S., Guisan, A., & Zimmermann, N.
E. (2006). Novel methods improve prediction of species’ distributions from occurrence
data. Ecography, 29(January), 129–151.
Elith, J., Leathwick, J. R., & Hastie, T. (2008). A working guide to boosted regression trees.
Journal of Animal Ecology, 77, 802–813.
Fortin, M.-J., & Dale, M.R.T. (2005). Spatial Analysis: A guide for ecologists. Cambridge
University Press. 365 pp.
Fortin, M.-J., Keitt, T.H., Maurer, B.A., Taper, M.L., Kaufman, D.M,, & Blackburn, T.M. (2005)
Species' geographic ranges and distributional limits: pattern analysis and statistical issues.
OIKOS, 7, 7-17.
Gibbs, J. P. (1993). School of Forestry and Environmental Studies Yale University 205 Prospect
St. New Haven, C T 06511. Wetlands, 13(1), 25–31.
Gibbs, J. P., & Shriver, W. G. (2002). Estimating the effects of road mortality on turtle
populations. Conservation Biology, 16(6), 1647-1652.
Gotthard, K., & Hylin, S. (1995). Adaptive plasticity and plasticity as an adpation: a selective
review of plasticity in animal morphology and life history. OIKOS, 74, 3-17.
Gottschalk, T.K., Huettmann, F., & Ehlers, M. (2005). Review article: Thirty years of analysing
and modelling avian habitat relationships using satellite imagery data: a review.
International Journal of Remote Sensing, 26(12), 2631-2656.
Grant, W. B. (2009). Air pollution in relation to US cancer mortality rates: an ecological study;
likely role of carbonaceous aerosols and polycyclic aromatic hydrocarbons. Anticancer
Research, 29(9), 3537-3545.
Hamernick, M. (2000). Home ranges and habitat selection of Blanding’s Turtles (Emydoidea
blandingii) at the Weaver Dunes , Minnesota. Chelonian Conservation and Biology, 3(4),
557–568.
Heggenes, J., Northtote, T. G., & Peter, A. (1991). Seasonal habitat selection and preferences by
Cutthroat Trout (Oncorhnchus clarki) in a small, coastal stream. Canadian Journal of
Fisheries and Aquatic Science, 48, 1364–1370.
Humphrey, S. R., & Zinn, T. L. (1982). Seasonal habitat use by river otters and Everglands mink
in florida. Journal of Wildlife Management, 46(2), 375–381.
Jafari, A., Khademi, H., Finke, P. A., Wauw, J. Van De, & Ayoubi, S. (2014). Spatial prediction
of soil great groups by boosted regression trees using a limited point dataset in an arid
region , southeastern Iran. Geoderma, 232-234, 148–163.

103
Jeganathan, P., Green, R. E., Norris, K., Vogiatzakis, I. N., Bartsch, A., Wotton, S. R., …
Rahmani, A. R. (2004). Modelling habitat selection and distribution of the critically
endangered Jerdon’s courser Rhinoptilus bitorquatus in scrub jungle: An application of a
new tracking method. Journal of Applied Ecology, 41(2), 224–237.
Johnson, C. J., Seip, D. R., & Boyce, M. S. (2004). A quantitative approach to conservation
planning : using resource selection functions to map the distribution of mountain caribou
at multiple spatial scales. Journal of Applied Ecology, 41, 238–251.
Jones, J. A., Swanson, F. J., Wemple, B. C., & Snyder, K. U. (2000). Effects of roads on
hydrology, geomorphology, and disturbance patches in stream networks. Conservation
Biology, 14(1), 76-85.
Joyal, L. a., McCollough, M., & Hunter, M. L. (2001). Landscape Ecology Approaches to
Wetland Species Conservation: a Case Study of Two Turtle Species in Southern Maine.
Conservation Biology, 15(6), 1755–1762.
Kath, J., LeBrocque, A., Miller, C., & Conservation, B. (2010). Wetland Hydrology in an
Agricultural Landscape , Implications for Biodiversity. BALWOIS, (May), 1–13.
Millar, C. S., & Blouin-Demers, G. (2011). Spatial Ecology and Seasonal Activity of Blanding’s
Turtles (Emydoidea blandingii) in Ontario, Canada. Journal of Herpetology, 45(3), 370–
378.
Moore, J. A., & Gillingham, J. C. (2006). Spatial Ecology and Multi-Scale Habitat Selection by a
Threatened Rattlesnake : The Eastern Massasauga (Sistrurus catenatus catenatus).
Copeia, (4), 742–751.
NWWG: National Wetlands Working Group. (1997). The Canadian Wetland Classification
System, 2nd Edition. Warner, B.G. and Rubec, C.D.A. (eds), Wetlands Research Centre,
University of Waterloo, ON, Canada. 68pp.
Nielsen, S. E., Mcdermid, G., Stenhouse, G. B., & Boyce, M. S. (2010). Dynamic wildlife
habitat models : Seasonal foods and mortality risk predict occupancy-abundance and
habitat selection in grizzly bears. Biological Conservation, 143, 1623–1634.
OWES: Ontario Wetland Evaluation System: Southern Manual. 2002. Ontario Ministry of
Natural Resources. NEST Technical Manual TM-002. MNR Warehouse #50254-1. 178p.
Osborne, P. E., Alonso, J. C., & Bryant, R. G. (2001). Modelling landscape‐scale habitat use
using GIS and remote sensing: a case study with great bustards. Journal of Applied
Ecology, 38(2), 458-471.
Ozesmi, S. L., & Bauer, M. E. (2002). Satellite remote sensing of wetlands. Wetlands Ecology
and Management, 10, 381–402.
Pappas, M. J., & Brecke, B. J. (2009). Habitat Selection of Juvenile Blanding’s Turtles ,
Emydoidea blandingii. Journal of Herpetology, 26(2), 233–234.
Paterson, J. E., Steinberg, B. D., & Litzgus, J. D. (2014). Effects of body size, habitat selection
and exposure on hatchling turtle survival. Journal of Zoology, 294(4), 278–285.
Rasmussen, M.L., & Litzgus, J.D. (2010) Habitat Selection and Movement Patterns of Spotted
Turtles (Clemmys guttata): Effects of Spatial and Temporal Scales of Analyses. Copeia,
2010,1, 86-96.

104
Reed, R. A., Johnson‐Barnard, J., & Baker, W. L. (1996). Contribution of roads to forest
fragmentation in the Rocky Mountains. Conservation Biology, 10(4), 1098-1106.
Richter, R., et al (2006) An automatic atmospheric correction algorithm for visible-NIR imagery.
International Journal of Remote Sensing, 27 (10), 2077-2085.
Richter, R. (1996) Atmospheric correction of satellite data with haze removal including a haze-
clear transition region. Computers & Geosciences, 22 (6), 675-681.
Ridgeway, G. (2006). Gbm: Generalized boosted regression models. R package version 1.5-7.
RAND Statistics Group, Santa Monica, California.
R Core Team (2014). R: A language and environment for statistical computing. R Foundation for
Statistical Computing, Vienna, Austria. URL http://www.R-project.org/
Ross, D. a., & Anderson, R. K. (1990). Habitat use, movements, and nesting of Emydoidea
blandingi in central Wisconsin. Journal of Herpetology, 24(1), 6–12.
Ross, D. A., Anderson, R. K., Journal, S., & Mar, N. (1990). Habitat Use , Movements , and
Nesting of Emydoidea blandingi in Central Wisconsin. Journal of Herpetology, 24(1), 6–
12.
Rowe, J. W. (1992). Dietary Habits of the Blanding’s Turtle (Emydoidea blandingii) in
Northeastern Illinois. Journal of Herpetology, 26(1), 111–114.
Rushton, S. P., Merod, S. J. O. R., & Kerby, G. (2004). New paradigms for modelling species
distributions? Journal of Applied Ecology, 41, 193– 200.
Semlitsch, R. D., & Bodie, J. R. (1998). Are small, isolated wetlands expendable? Conservation
Biology, 12(5), 1129–1133.
Shen, L., He, Y., and Guo, X. (2013). Exploration of loggerhead shrike habitats in Grasslands
National Park based on in situ measurements and satellite-derived adjusted transformed
soil-adjusted vegetation index. Remote Sensing, 5, 452-453.
Stokland, J. N., Halvorsen, R., & Støa, B. (2011). Species distribution modelling-Effect of
design and sample size of pseudo-absence observations. Ecological Modelling, 222(11),
1800–1809.
Stumpf, R. P., Holderied, K., & Sinclair, M. (2003). Determination of water depth with high‐resolution satellite imagery over variable bottom types. Limnology and Oceanography,
48, 547-556.
Turner, W., Spector, S., Gardiner, N., Fladeland, M., Sterling, E., & Steininger, M. (2003).
Remote sensing for biodiversity science and conservation. Trends in Ecology &
Evolution, 18(6), 306-314.
Voigts, D. K. (1976). Aquatic invertebrate abundance in relation to changing marsh vegetation.
American Midland Naturalist, 95(2), 313–322.
Wallace, R. B. (2006). Seasonal variations in Black-Faced Black Spider monkey (Ateles
chamek) habitat use and ranging behavior in a southern Amazonian tropical forest.
American Journal of Primatology, 68, 313–332.
Wei, A., & Chow-Fraser, P. (2007). Use of IKONOS imagery to map coastal wetlands of
Georgian Bay. Fisheries, 32(4), 164–173.

105
Wiktander, U., Olsson, O., & Nilsson, S. G. (2001). Seasonal variation in home-range size , and
habitat area requirement of the lesser spotted woodpecker (Dendrocopos minor) in
southern Sweden. Biological Conservation, 100, 387–395.
Wintle, A. B. A., & Bardos, D. C. (2006). Modelling species-habitat relationships with spatially
autocorrelated observation data. Ecological Applications, 16(5), 1945–1958.
Zedler, P. H. (2003). Vernal pools and the concept of “Isolated Wetlands.” Wetlands, 23(3),
597–607.
Zhang, Y., Guindon, B., Cihlar, J. (2002) An image transform to characterize and compensate for
spatial variations in thin cloud contamination of Landsat Images. Remote Sensing of
Environment, 82, 173-187.
Zimmermann, N. E., Edwards, T. C., Moisen, G. G., Frescino, T. S., & Blackard, J. a. (2007).
Remote sensing-based predictors improve distribution models of rare, early successional
and broadleaf tree species in Utah. Journal of Applied Ecology, 44(5), 1057–1067.

106
Chapter 4
Estimating seasonal landscape connectivity for Blanding’s turtles in a fragmented agricultural landscape
Introduction
Effective species conservation must include critical aspects of physiology, behaviour, and habitat
required for a species to persist. Consideration must include both time and space in order to
come to an understanding that reflects the true ecology of the species. Models which predict
species occurrence based on environmental variables are important for identifying key habitat
regions to inform conservation policies, prioritize for surveying of rare or cryptic species, and to
monitor changes over time. However, with the increasing urbanization and widespread alteration
of the landscape by humans, it cannot be assumed that a species can exist in isolation in patches
of suitable habitat. Connectivity therefore, defined as the ease with which individuals can move
within the landscape (Merriam, 1984), is considered of paramount importance for species
survival (Fahrig & Merriam, 1994; Calabrese & Fagan, 2004). At the immediate time frame, the
ability to move across the landscape can be driven by basic physiological needs such as the
search for food, water, or nesting sites, as well as behavioural drivers such as mate searching, or
predator avoidance. On a more intermediate time-scale, stochastic events such as a drought, can
drive animals to search for alternate habitat, while the long-term trend of warming, may push
species to shift entire ranges (Nuñez et al., 2013).
One of the most commonly encountered human-constructed landscape features that affect
wildlife movement are roads. Roads present a significant barrier to movement for many species
(Forman, 1998; van der Ree et al., 2011), although slow-moving animals suffer greater negative
effects due to increased mortality with vehicle collisions (Coffin, 2007). Roads are described as
the single most destructive element in the process of habitat fragmentation (van der Ree et al.,
2011) and are the only spatial element that can be found in essentially all landscapes (Forman,
1998). The negative effects of roads extend beyond the impediment of movement, and include
changes to hydrology and water quality ( Jones et al., 2000), introduction of chemical pollutants
(Grant et al., 2003), facilitators of the invasive species spread (Coffin, 2007), and an increase in
human-induced edge effects (Reed et al., 1996). While there are a range of modified landscapes

107
that can affect movement probability in different ways, agricultural landscapes present additional
complexity due to their temporally dynamic nature, both within and between years (Burel &
Baudry, 2005). Short term annual changes include the rapid growth of crops and varied
harvesting schedules, while inter-annual crop succession and rotation will change spatially as
well as in extent, presenting an ever shifting mosaic of land cover types for wildlife to navigate.
Moreover, the agricultural landscape also includes farming structures, and farming systems (e.g.
irrigation, fertilization, harvesting equipment) that interact closely with the landscape (Burel &
Baudry, 1995). Agricultural land occupies approximately half of earth’s habitable area, or 38%
of the planet’s land surface (Clay, 2004), and the effect on species habitat loss may be
disproportionately larger than the physical loss in area since agricultural spread tends to occur in
regions with particularly high biodiversity (Scharlemann, et al., 2004).
Efforts to quantify such complex landscapes in terms of both structural and functional
connectivity have resulted in a multitude of modelling approaches, though there is little
consensus on the best general approach (Calabrese & Fagan, 2004). Simple measures of
connectivity have been estimated through the use of patch-based indices which focus on the
distribution of habitat rather than the underlying matrix . Measures of nearest neighbour distance
are easy to obtain but can be over simplistic (Calabrese & Fagan, 2004) and generally do not
perform well compared to other metrics (Bender et al., 2003). Spatial pattern indices quantify the
spatial arrangement as well as the number, size, and shape of habitat patches under the
assumption that these metrics affect species movement (Calabrese & Fagan, 2004) and are easy
to apply across large regions. Popular graph-theoretic approaches include resistance based
models such as least-cost pathways (Adriaensen et al., 2003) and circuit theory (McRae et al.,
2008) which analyse the cost of movement between patches to identify optimal linkages or
corridors. Likely the most accurate estimates of connectivity are provided by empirical data on
actual observed movements of individuals of a species (e.g., Meegan & Maehr, 2000) but these
methods are labour-intensive and only applicable to species where movement rates are
sufficiently high to allow adequate data sampling (Calabrese & Fagan, 2004). Regardless of the
selected methodology, the same landscape can yield differing degrees of connectivity depending
on the characteristics of the habitat, matrix, and species (Schumaker, 1996; Tischendorf &
Fahrig, 2000). As disturbances derived from both natural and anthropogenic sources can operate

108
at more than one spatial and temporal scale (Fortin & Agrawal, 2005) analyses of connectivity
must also consider these important dimensions.
From a conservation and management perspective, information on landscape connectivity is
sorely needed for sensitive and declining species persisting in disturbed environments.
Identifying priority areas for improving connectivity is needed to decrease mortality, and
increase the potential for dispersal, and immigration which drive basic processes such as gene
flow and recolonization after disturbances and are critical to the maintenance of population
stability.
In this study, the focus shifts to estimating movement potential of Blanding’s turtle (Emydoidea
blandingii) in the fragmented agricultural study area which represents the dominant landscape of
southern Ontario. Extensive drainage of wetlands for agricultural purposes has occurred
historically with an estimated minimum of 80% of wetlands lost since European settlement
(Bardecki, 1982). This region is also considered a significant “hotspot” of herpetofaunal
diversity and species at risk (Lesbarrères et al., 2014) and represent a much understudied taxa in
the field of urban wildlife research (Magle et al., 2012). As wetlands typically occur in discrete
patches surrounded by a varying matrix of upland habitat, many wetland-dependent organisms
consequently live in multiple local populations sustained through movement of individuals
among patches (Gibbs, 2001). Reptiles and amphibians represent a unique taxa in this regard as
they are limited in their ability to disperse or migrate to more suitable environs compared to birds
and mammals. Turtles exhibit habits that make them especially sensitive to landscape
modification (Fahrig & Rytwinski, 2009; Gibbs & Shriver, 2002) including delayed sexual
maturity, extreme longevity, and low annual fecundity (Congdon et al., 2008; Marchand &
Litvaitis, 2004). The Committee on the Status of Endangered Wildlife in Canada (COSEWIC)
has given a designation of at-risk to seven of eight native Ontario turtles with some form of
habitat fragmentation and development identified as a primary cause of decline for every species.
Past work on Blanding’s turtle habitat use and ecology has found they can utilise as many as 20
unique wetlands annually, and as few as one (Beaudry et al., 2009), and travel extensively across
the landscape where they frequently overlap with areas of human activity (Congdon et al., 2011),
making them an appropriate model for examining landscape connectivity.

109
The goal of this study is to examine the seasonal change in landscape connectivity for Blanding’s
turtles in a typical southern Ontario landscape to better understand how freshwater turtles move
in heavily disturbed environments. To achieve this objective, predictive models are developed
across two biologically meaningful periods during the active (non-hibernating) season. Three
different measures of connectivity are applied to characterize the connectivity of the landscape,
and to compare results amongst different approaches. Finally, a set of recommendations for
improving connectivity for turtles in the study area are compiled, taking into account shifting
core habitat, and behavioural and physiological drivers of movement.
Methods
4.2.1 Study Area and Blanding’s Turtle Population
This study focused on the connectivity of remnant wetlands located in my agricultural study site,
which represents the dominant landscape type overlapping with the Blanding’s turtle range in
Ontario (Figure 4-1). Along with the provincially significant Oakland Swamp, several smaller
wetlands of variable size and shape were also distributed throughout the study area including
marshes, swamps, and shallow open water surrounded by varying configurations of upland
matrix (Figure 4-2).
Figure 4-1. Map depicting Blanding’s turtle range in North
America, and study site in southern Ontario. Map image licensed
under Creative Commons 3.0.

110
The study area was dominated by active agricultural crops such as corn, soy, tobacco, ginseng
and millet embedded in a matrix of semi-natural cover types such as mixed forest buffers,
hedgerows, mixed meadows, riparian vegetation, and aquatic features, including remnant natural
wetland (ponds, emergent, sedge and wet meadow marshes, scrub-shrub and willow swamps),
and man-made irrigation ponds. Roads bisect the entire study area which encompassed 90 km2.
A population of Blanding’s turtles persists in the landscape, though road mortality has been
reported in the study region. Total population size and status are unknown, but estimated at over
100 individuals including over 30 reproductive females which makes this one of the larger
documented populations in the province. Paved and unpaved roads bisect the entire study area,
including the 840 ha wetland, and high traffic volumes (>400 vehicles per hour during peak
daylight hours) have been documented across the main provincial highway that bisects the study
region.
Figure 4-2. Examples of wetland habitat found in the agriculturally-modified landscape
depicting habitat patches bisected by roads (A), isolated wetlands surrounded by
farmland (B), man-made irrigation ponds serving as temporary refuge (C), and natural
corridors bisected by multiple roads (D). Imagery: © Digital Globe 2015, Google Map
data 2015.

111
4.2.2 Seasonal Land cover Maps and Habitat Nodes
Seasonal land cover maps over the agricultural site were developed using the GEOBIA approach
from Chapter Two and are shown in Figure 4-3. Major changes from spring to late summer
include a reduction in wetland habitat, particularly emergent marsh and open water habitats as
well as a rapid increase in crop growth from barren soil in the spring (yellow) to closed canopy
plots of land by the late summer (orange). Some misclassification occurred in the late spring
landcover map (Figure 4-3, right) between the grown crop field and forest classes (white arrows).
Figure 4-3. Seasonal landcover maps over the agricultural site developed from multispectral
satellite imagery acquired in the spring (left) by GeoEye1 (April 2012) and late summer (right)
by WorldView2 (September 2013). Images were classified using a multi-scale geographic
object-based image analysis (GEOBIA) approach, and the nearest neighbour classifier.

112
Habitat nodes (or patches) were identified in Chapter Two using a boosted regression tree
approach to model species occupancy across the spring (April-June) and late summer (July-
September) periods defined in this study. Species presence was identified through radio-
telemetry observations, and environmental variables were derived from high spatial resolution
satellite-data, seasonal land cover maps and a provincial digital elevation model. Habitat nodes
were defined by setting a thresholds of estimated probability of occurrence (≥ 0.6) following a
sensitivity analysis conducted in the previous chapter (Figure 4-4, pink polygons). Wetlands
below an area threshold of 25 m2 were filtered out of the map as they generally represented
mapping error and did not constitute actual wetland habitat. The amount of available habitat
decreased by the late summer predominantly due to loss of available standing water as well as
significant changes in wetland vegetation that closed off early spring aquatic passages.
4.2.3 Resistance Layers
In the context of animal movement, the term ‘resistance’ characterizes the willingness of an
organism to cross a particular environment, and ideally should incorporate contributing factors
such as physiological costs, and features that reduce survival (Zeller et al., 2012). The basic
assumption is that species will move across the path of least resistance (Beier et al., 2009) , and
that this selection can be accurately estimated and modelled. Methods of estimating resistance
surfaces include expert-based approaches (Chardon et al., 2003; Moore et al., 2011), empirical
methods such as detection (Bartelt et al., 2010; Wang et al., 2008), and genetic routes (Epps et
al., 2007; Castilho et al., 2011). Empirical methods of estimation can be challenging because
animal movement is one of the most difficult behaviours to quantify (Zeller et al., 2012). While
genetic data has been used for investigating mobile species such as wolverines (McRae & Beier,
2007) and, also for species with low vagility, but with a high generational turnover time such as
amphibians (Moore et al., 2011), the life history characteristics of freshwater turtles are not well-
suited to this approach. Traits such as delayed sexual maturity, high nest mortality, and extreme
longevity (Congdon et al., 2008; Marchand & Livaitis, 2004) make them poor candidates for
understanding connectivity through gene flow. In this study resistance surface parameters were
estimated using an expert-literature based approach. Three experts from the Toronto Zoo and
Acadia University were presented with data on landscape features encountered in the non-habitat

113
matrix in the study area, and were asked to assign a value between 0 and 100 relating to two
aspects of Blanding’s turtle movement.
behaviour (see Appendix B2). First, the likelihood of travel or the animals’ willingness to cross
through a landscape feature. This category addressed the seasonal aspect of the species’
behaviour by considering the likelihood of whether an individual would traverse a region given
its behavioural and physiological needs of that period of the active season. Secondly, the
probability of success or the turtle’s physical ability to successfully cross the landscape feature
was estimated. For example, if a turtle has prior knowledge of a habitat patch that it wants to
access, it will willingly cross a road barrier in a relatively straight line trajectory to access said
patch. While the willingness to travel may be high, the ability to physically cross this road
feature would be low as road mortality is very probable for slow-moving turtles.
Final resistance values were averaged across all respondents for each land cover type. Land
cover maps were reclassified according to resistance values to produce new base maps for each
season (Figure 4-4).
Figure 4-4. Resistance maps developed from expert-based knowledge. Habitat nodes shown
in pink for the early spring (left) and late summer (right). Higher resistance is shown in
lighter colours, and lower resistance in darker colours.

114
4.2.4 Connectivity Modelling Overview
Three metrics to quantify, predict and visualize ecological connectivity for turtles in this
landscape are employed. No single measure of connectivity can reliably reflect all dispersal
characteristics of the species, which may vary by age cohort, gender, and prior experience
(knowledge of the landscape). Older individuals with prior knowledge of alternate habitat
patches may follow a direct pathway towards that patch, which relates to models based on
Euclidean distances (e.g., least cost paths). On the other hand, juveniles which do not emerge
from the shelter of aquatic habitats until much later in life, would follow a less purposeful and
meandering path before encountering a favourable patch. Even if environmental cues such as
water orienting (McNeil et al., 2000) were used, animals would still need to reach a location in
the landscape (e.g., higher elevation, or reduced cover) in order to use such signals. Moreover,
from an application perspective, there is a relatively poor ability to compare between different
metrics (Kindlmann & Burel, 2008), therefore a multi-technique approach can provide more
information to allow for comparison with other studies and landscapes. Nesting females require
special considerations as a result of extended searching behaviour and selection of terrestrial
oviposition sites. As nesting site selection is dictated by habitat characteristics other than those
governing core wetland selection, the movements of nesting females were not considered in this
study.
Functional connectivity was mapped using the graph theory approach to predict least-cost
pathways, general corridors across the study site, and patch-based indices to assess the relative
influence of specific nodes and links. Functional spatial graphs consider both the structural
characteristics (e.g. distance) and quality of the intervening non-habitat matrix (e.g. road barriers
) that may impede movement for a species (Fortin et al., 2012). Connectivity was analysed over
two periods corresponding with early active season emergence from hibernation, foraging, and
mating (April-June), and later season aestivation and migration to deeper pools for
thermoregulation and preparation for hibernation (July-Sept). The ability to move across the
landscape is important for short-term needs such as finding food, in response to inter annual
variation in precipitation (e.g., drought years), and as a result of long-term climate change
forecasts which may drive populations slowly northwards. As all types of movements were being
evaluated, a threshold of maximum distance beyond which the turtles would not disperse, was
not set. Long distance (> 1 km) movements by Blanding’s turtles have been documented in the

115
literature, yet are not a common occurrence. Instead turtles will often use small patches of water
(e.g. irrigation ponds) as ‘stepping stones’ which increase the overall distance they can travel,
allowing connectivity to be assessed across our entire study area.
Least-Cost Modelling. In least-cost modelling, a single path of least resistance between two
nodes, or habitat patches was identified based on an underlying resistance surface which
characterizes the non-habitat areas (Adriaensen et al., 2003). This approach assumes an
individual has prior knowledge of the landscape being traversed (McRae et al., 2008), which
characterizes the behaviour of older adults Blanding’s turtles in the study area who have
accumulated a greater familiarity with the landscape. This allows the selection of the shortest
(based on Euclidean distance) path of least resistance towards a chosen destination. Identification
and mapping of LCPs was implemented in Linkage Mapper 1.0.8 (McRae & Kavanagh, 2011)
through ArcGIS 10.2. A resistance raster was developed from land cover maps at a spatial
resolution of 2.0 m which characterized the landscape in early spring (April, 2012) and late
summer (September, 2013). Land cover maps were developed in Chapter Two, using a
geographic object-based image analysis (GEOBIA) approach to segmenting and classifying
multispectral imagery. While the LCP method has been used often, it is generally accepted that
individuals may not travel through a single pathway, nor would they always traverse the shortest
direct route possible. Therefore, a complementary alternative to the single pathway approach, is
the modelling of multiple corridors using circuit theory.
Circuit Theory Corridor Modelling. Circuit theory is based in Markovian random walk theory
which describes every movement as a random choice with an equal probability of moving in any
direction (McRae et al., 2008) and is particularly suited to species with random dispersal patterns
(Rayfield et al., 2011). With this approach, total resistance or conductance across the landscape
is characterized, as opposed to single linear pathways. Within this framework, an individual is
not assumed to have prior knowledge of the landscape, which appropriately models the
behaviour of both inexperienced juvenile Blanding’s turtles, immigrants into the study area, and
long-distance dispersers in response to stochastic events. Similar to LCP modelling, this
approach maintains the premise that movement can be impeded by various landscape factors, but
it also considers characteristics that may facilitate or conduct movement (Howey, 2011). Thus, a
circuit theory model predicts an array of circuits, or corridors that facilitate movement, which
incorporates additional spatial information about the non-habitat matrix (Rayfield et al., 2011)

116
while not requiring adherence to the shortest Euclidean distance (McRae et al., 2008). Circuit
modelling was implemented through Circuitscape 4.0.5 (McRae & Shah, 2009) using the
pairwise mode which considers conductance across all pairs of nodes in the study area.
Resistance-conductance surface layers were resampled to 10 m due to processing constraints,
though all relevant landscape elements were maintained.
Patch-based Indices. In patch-based models, it is the relationship among patches of habitats or
nodes, that is modelled (Galpern et al., 2011) and not the composition or structure of the non-
habitat matrix. In patch-centric approaches, links between habitat patches commonly represent
geographic distance with the probability of connection decreasing or disappearing below a
movement threshold relevant to the target species (Galpern et al., 2011). Previous applications
of this approach include the identification of patches which play a higher role in connectivity,
which can be used to assign conservation priority for a declining species (Pascual-Hortal &
Saura, 2008). In this study the importance of each wetland habitat patch in the network was
assessed using a measure of the relative change in the Integral Index of Connectivity (dIIC:
Pascual-Hortal and Saura, 2006) given by the equations:
�� =
∑ ∑ "# × "%&%'(
&#'(
(()&*#%)
+,-
.�� / (%) = �� − �� 123452,/
�� × 100
In equation (1), n is the total number of nodes in the landscape, ai and aj represent the area of
the wetlands i and j, nlij is a measure of the number of shortest connecting links between
wetlands, and AL is the total size of the landscape. If two wetlands are not connected, then nlij =
∞, and IIC = 1 if the entire landscape is occupied by habitat. In Equation (2), IICremove,k
represents the IIC value when wetland k is lost from the habitat network. The value of dIICk is
the percent reduction in IIC that occurs when wetland k is lost (i.e., the importance of wetland k
in the network). The dIIC model is a binary connection model which considers two nodes as
connected or not, based on a specified threshold dispersal distance (Saura & Torné, 2009). The
threshold was set to the maximum length of the study area to allow all connections to be
considered since turtles generally do not disperse according to a one time long-distance event for
which a threshold can be clearly identified, but rather move shorter distances among patches
(2)
(1)

117
which are used as stepping stones. The binary approach was chosen over the probabilistic
version of the connection model as the use of interpatch distance as a decreasing exponential
function did not appear to emulate the behaviour of our study species, for which distance is not
necessarily a limiting factor to movement. IIC and dIIC values were calculated using Conefor 2.6
software (Saura & Torné, 2009). These indices represent the importance of each individual
habitat patch for maintaining overall landscape connectivity, which allows the ranking of patches
according to their contribution.
An overall index of connectivity was also calculated to compare between seasons over the study
site using an Equivalent Connectivity value of the dIIC (Saura et al., 2011). In this metric, the
area of the patch was used as the node attribute, and was calculated as the square root of the
numerator of the IIC index (equation 1, above). The EC(IIC) metric is defined as the size of a
single habitat patch that would provide the same value of the IIC metric corresponding to the
actual habitat pattern in the landscape (Saura & Torné, 2009).
4.2.5 Evaluation
Animal movement is one of the most difficult behaviours to quantify and observe (Zeller et al.,
2012), therefore evaluating the accuracy of connectivity models can be challenging. Due to their
cryptic nature and low vagility compared to more mobile taxa, empirical data on movement
selection can be difficult to assemble for turtles. Moreover, the longevity of many turtle species
means that long-distance movements may occur only a few times in the animals’ lifetime; an
infrequent event which radio-telemetry studies of typically one or two active seasons will likely
not be able to capture. In this study, site specific findings pertaining to known barriers, field
survey sightings, and radio-telemetry data are used to provide support or contrast results of
connectivity models and indices.
Results and Discussion
4.3.1 Least-Cost Pathways & Patch-based Indices
Overall, the number of habitat patches and links (LCPs) was higher during the spring compared
to late summer (Table 4-1). Average patch area was 2.28 ha for the spring, and decreased to 1.20

118
ha in the late summer (p < 0.05), while average spring LCP length (998 m) increased by late
summer (1185 m; p < 0.05). LCPs differed in the number, length, and directionality of links
with the spring model demonstrating a more complex network (Figure 4-6).
Table 4-1. Summary of habitat patch, LCPs and overall landscape indices for
the spring and late summer connectivity models († p < 0.05)
Spring Late Summer
Number of Patches 101 56
Average Patch Area 2.28 ha (SE±0.44) 1.20 ha (SE±0.29) †
Number of LCPs 209 119
Average LCP Length 998 m (SE±61.5) 1185 m (SE±84.9) †
Overall Index of
Connectivity (EC[dIIC])
130.59
37.15
This change in seasonal LCP network complexity is partly a logical consequence of the greater
number of habitat patches existing during the early season, since ephemeral wetlands are most
abundant during this time of year (Zedler, 2003), and Blanding’s turtles are known to exploit this
resource for mating and foraging (Beaudry et al., 2009). Behavioural drivers of movement
across the landscape are also higher in the spring due to the turtles’ physiological requirement of
quickly increasing body mass through consumption after long months spent in hibernation. As
the season progresses, and temperatures increase, food requirements of ectothermic turtles will
decrease along with activity and these physiological and behavioural aspects were incorporated
into resistance surfaces from which final LCP models were derived.
Patch-based indices were determined using the overall index of connectivity (EC[dIIC]), which
was higher in the spring season (130.59) indicating a higher level of connectivity compared to
the late summer (37.15). Interestingly, dIIC values identified two different habitat patches from
each season, as contributing the highest to overall network connectivity. During the spring, a
patch in the northern region was identified (Figure 4-5; left (a)), while influence shifts
dramatically to the far south of the study area by late summer (Figure 4-5: right (c)). This
southern node is known to support open marsh habitat and permanent deeper water throughout
the active season. It is also the only other patch where consistent observations of a smaller
population of Blanding’s turtles have been confirmed.

119
In both seasons, the primary habitat patch known to support the source population in this study
area was identified as one of the top three patches positively influencing connectivity (Figure 4-
5: left and right (a)). This is likely a result of the larger size of this patch compared to others as
well as its close proximity to many other identified patches. Preferred habitat of open shallow
water, and marsh habitat with abundant aquatic vegetation as well as standing water throughout
the active season were characteristic of this node.
Figure 4-5. Predicted least-cost pathways (dashed lines) connecting spatially shifting
seasonal habitat nodes during the spring (left) and late summer (right) season. Nodes
coloured according to relative contribution to connectivity of the network (more
important nodes are red, least important nodes are blue. Top three nodes with highest
dIIC scores (∆ Integral Index of Connectivity; nodes for which removal would most
strongly reduce connectivity) are labelled. Higher dIIC scores indicate higher
importance.

120
A puzzling finding from the dIIC analysis was that two spatially disparate habitat nodes were
found to contribute the strongest to connectivity across each season. This discrepancy cannot be
easily explained however, it could be postulated that the change in spatial configuration of nodes
between seasons contributed to this result. The dIIC values utilise a measure of Euclidean
distance between nodes in the analysis, therefore a change in distance, and quantity of links
between nodes, would result in different nodes becoming central to the network. The circuit-
based model may elucidate some possibilities for this result, as the early season model
demonstrated a marked increase in conductance in the north western quadrant of the study area
which decreased by late summer and shifted instead towards the southern region. These
complementary findings highlight the advantage employing multiple metrics to assess
connectivity.
If connectivity potential was higher in the southern patch during the late summer, this would
explain the shift in importance. Another possible explanation is the acquisition of satellite
imagery during different years. The spring image was acquired in April of 2012 while the late
summer image was taken in September 2013, allowing for either further human or climate-
mediated changes to the landscape, to alter the character of resistance surfaces or habitat nodes.
Regardless of the underlying cause, this finding does lend support to the notion that landscapes
are highly dynamic in nature.
4.3.2 Circuit-based corridors
Current maps show several corridors of high conductance (red areas) that represent potential
movement routes for Blanding’s turtles (Figure 4-6). The spring corridors closely match the
shape of both the Oakland swamp, and the creek systems that sustain this wetland, indicating
primary routes that may facilitate movement. In this context, roads that bisect these natural areas
are highlighted as linear features of lower conductance (yellow or blue linear features). Circuit-
based corridors paralleled least-cost paths in relation to natural areas, but there was less
agreement between paths and corridors crossing the upland matrix.
Overall, the spring circuit model displays a greater proportion of the landscape categorized as
high conductance, particularly in two regions to the northwest and southeast of the study regions
(Figure 4-6, boxed regions a and b) while the late summer model identifies one region of higher

121
conductance in the southwest quadrant of the map (Figure 4-6, boxed region c). The majority of
the disturbed (or altered) portions of landscape are categorized as moderate to low conductance
while sections of semi-natural features (e.g., creeks, riparian vegetation) are depicted as having
high conductivity.
These results appear to more closely approximate what are believed to be actual corridors
through natural landscape features bordering waterways. Notably, there were no clear corridors
defined through the patchwork of agricultural crops, indicating poor selection of cover types for
movement. Paths of high conductance suggest a central artery running through the Oakland
swamp and southwards into the tributary and larger ponds. A secondary corridor can be
visualized following the creek system across the eastern half of the study area and southwards to
connect with the same ponds in that region. Circuit-based current maps have been used
frequently in mapping gene flow for large mammals across large regions such as mountain lions
in southern Brazil (Castilho, Marins-Sá, Benedet, & Freitas, 2011), and wolverines across the
northern U.S. Rockies (Schwartz et al., 2009), however these results demonstrate that this
approach can have equal value when applied across the landscape scale, and for species that
demonstrate a year-round close association to the landscape.

122
Figure 4-6. Results of circuit-based models showing corridors of highest conductance
during the spring (left) and late summer (right). Areas of higher conductance are shown in
red, which denote predicted corridors for Blanding’s turtles. Boxed regions (a, b, c) show
areas of significant change in conductance between maps.
4.3.3 Barrier Mapping
143 instances were identified where LCPs crossed over a paved road in the spring connectivity
model, and 111 instances in the late summer model (Figure 4-7) using the Intersect tool (ArcMap
10.2). Spring LCPs also crossed through 82 residential/suburban parcels with an average overlap
length of 12 m (SE±1.5m). Late summer LCPs crossed through 158 parcels with a greater
average overlap length of 30.9 m (SE±4.09 m). There were an average of 143 intersections with
LCPs per road during the early season period, and 111 by the end of the season. Roads represent
a significant barrier for turtles (Gibbs & Shriver, 2002), particularly for gravid (nesting) females

123
(Steen et al., 2006; Gibbs & Steen, 2005), which also represent the most important cohort for
maintaining population stability (Congdon et al., 1993).
Data obtained from radio-telemetry plotted over spring circuit-based corridors shows a direct
intersection of a major highway with a correctly identified corridor as well as confirmation of
road crossing through analysis of individual movement based on telemetry data (Figure 4-8).
This intersection of road, corridor, and significant habitat nodes (as identified through patch-
based indices and field-telemetry data) was the site of multiple road mortality incidences prior to
the initiation of an ecopassage project which resulted in the installation of exclusion fencing in
2011. The fencing effectively acted as a funnel to coerce turtles through the existing aquatic
culver to prevent futher road mortality. Although public awareness and scientific research on the
Figure 4-7. Barrier map depicting intersect points between LCPs and paved roads in the
spring (left) and late summer (right) connectivity models.

124
effect of roads on wildlife has increased, proven methods for identifying target locations for
mitigation (e.g., ecopassage or exclusion fencing installation) are still lacking.
Overall, the utility of the LCP approach in identifying locations where a road segment presented
a significant barrier was limited, its production of discrete linear pathways allowed the
calculation of supporting metrics such as average path length, and the intersection with built
features. The actual location of intersections provided little usable information but the quantity of
intersect points illustrated on a larger scale that access to all habitat patches in this landscape
would require the crossing of numerous roads. Data from field surveys and local residents
support the observations of numerous road mortality incidences in the study site. Moreover, data
from radio-telemetry also identified multiple road crossings from tagged individuals, including
Figure 4-8. Spring Circuitscape map combined with road network (a) and spring (April-June)
Blanding’s turtle telemetry points (b) showing turtle locations on either side of the road. The
image in (c) depicts the estimated movement pathway for a single adult Blanding’s turtle
demonstrating that turtles must cross roads to access preferred habitat.

125
one adult male who crossed a road at least thirteen times within one active season. Other
freshwater species such as the Painted turtle (Chrysemys picta) have also demonstrated a
propensity for crossing roads, and in straight-line trajectories towards known habitat patches,
which has been found to negatively affect connectivity for this species (Bowne, Bowers, &
Hines, 2006).
Conclusions
In this study, three methods to quantify and visualize connectivity potential for Blanding’s turtles
were used across two seasons to provide a better understanding of how turtles may move through
an agriculturally modified landscape. Circuit theory, least-cost modelling, and patch-based
indices each provided different yet complementary information towards this understanding.
Results indicate that that connectivity changed temporally and spatially across the two time
periods examined, and most likely this change in movement potential occurred along a gradient
rather than across a clear threshold.
Overall, the least-cost approach had limited general applicability as there was no empirical
evidence to support the use of such extensive networks of LCPs. In addition, the multitude of
intersections with barriers would point towards a requirement for an equally numerous quantity
of ecopassage structures, which is an infeasible approach. The least-cost approach has been
criticised for incorrectly assuming that animals will always make movement choices that are the
most optimal, and for indirectly suggesting that if optimal routes are protected, development may
continue elsewhere (Fahrig, 2007). Moreover, various factors such as temporary blockages,
presence of predators, or individual plasticity in travel preferences can cause divergences from
optimal path selection (Howey, 2011). Other studies comparing connectivity measures have
converged upon a similar conclusion when modelling movement for amphibians (Moore,
Tallmon, Nielsen, & Pyare, 2011) and wolverines (McRae & Beier, 2007), although in
circumstances where species’ are naturally distributed along narrow linear stretches of habitat,
they may exhibit movement characteristics more suited to this single pathway LCP approach
(Schwartz et al., 2009). However, used in conjunction with patch-based indices and barrier
mapping, LCPs can expose general trends towards characterizing the landscape. The circuit-
based approach appeared to best model the potential routes that turtles might traverse, and
provided a better overall characterization of the entire study area. The use of multiple approaches

126
to understanding landscape connectivity for Blanding’s turtles is strongly supported by this
study, though accurately capturing the processes that affect movement selection in such a
dynamic landscape, remain challenging.
Despite achieving support for connectivity measures applied in this study, the larger goal of
deriving accurate spatial information to inform actual ground level mitigation actions will be
challenging in this type of landscape. Human-modified landscapes tend to undergo continual
modifications, which can rarely be predicted. This is certainly true of agricultural landscapes
where land use decisions rest primarily on the shoulders of farmers and landowners (Burel &
Baudry, 1995). The rate at which human-related modification occurs is often at a speed and
frequency too great for animals to adapt behaviourally to select the safest paths (Fahrig, 2007).
This may result in the opposite effect whereby a mismatch in cues results in the animal selecting
non-optimal human-altered cover types, and falling victim to an ecological trap (Robertson &
Hutto, 2006). Turtles in fragmented landscapes already demonstrate this behavioural
characteristic when gravid females choose to nest along roadside shoulders, resulting in high
mortality for both the female, and her offspring (Steen et al., 2006). Challenges related to
methods of connectivity analysis include the need for more information on the selection of an
appropriate scale for modelling turtle movements.
From a management perspective, the baseline action that must first occur is the enforcement of
biologically relevant wetland-protection laws that conserve wetland mosaics and facilitate
movement between them. Protection must include small and ephemeral wetlands which represent
critical early spring foraging and breeding habitat for many reptiles and amphibians, and for
which a current weakness in the Ontario Wetland Evaluation System (OWES) is the exclusion of
wetlands < 2 ha from evaluation, regular monitoring, and hence protection (Schulte-Hostedde et
al., 2007). Roads should not be constructed across larger habitat patches which tend to support
the larger source populations of wetland-associated species such as Blanding’s turtles. Where
roads already exist, ecopassages should be installed along with exclusion fencing to funnel
turtles into these structures and increase their effectiveness. Concurrently, natural corridor
enhancement and creation should be planned to connect patches at multiple spatial scales
ensuring animals have the ability to disperse across a larger area as needed.

127
References
Adriaensen, F., Chardon, J. P., De Blust, G., Swinnen, E., Villalba, S., Gulinck, H., &
Matthysen, E. (2003). The application of “least-cost” modelling as a functional landscape
model. Landscape and Urban Planning, 64(4), 233–247.
Baillie, J.E., Griffiths, M., Turvey, J., Loh, S.T., Collen, B., (2010). Evolution lost: Status and
trends of the world’s vertebrates. Zoological Society of London, London.
Bardecki, M. J. (1982). The status of wetlands in southern Ontario. Wetlands, 2, 262–270.
Barker, R., & King, D. J. (2012). Blanding’s turtle (Emydoidea blandingii) potential habitat
mapping using aerial orthophotographic imagery and object based classification. Remote
Sensing, 4(1), 194–219.
Bartelt PE, Klaver RW, & W.P. Porter (2010). Modelling amphibian energetics, habitat
suitability, and movements of western toads, Anaxyrus ( Bufo) boreas, across present and
future landscapes. Ecological Modelling, 221:2675–2686.
Beaudry, F., deMaynadier, P. G., & Hunter, M. L. (2009). Seasonally dynamic habitat use by
Spotted (Clemmys guttata) and Blanding’s Turtles (Emydoidea blandingii) in Maine.
Journal of Herpetology, 43(4), 636–645
Beier, P., Majka, D.R., Newell, S.L. (2009). Uncertainty analysis of least-cost modelling for
designing wildlife linkages. Ecological Applications, 19: 2067-2077.
Bender, DJ, Tischendorf, L. & Fahrig, L. (2003). Using patch isolation metrics to predict animal
movement in binary landscapes. Landscape Ecology, 1,17–39.
Bowne, D. R., Bowers, M.A., & Hines, J. E. (2006). Connectivity in an agricultural landscape as
reflected by interpond movements of a freshwater turtle. Conservation Biology, 20(3),
780–791.
Burel, F., & Baudry, J. (1995). Species biodiversity in changing agricultural landscapes: A case
study in the Pays d’Auge, France. Agriculture, Ecosystems and Environment, 55(3), 193–
200.
Burel, F., & Baudry, J. (2005). Habitat quality and connectivity in agricultural landscapes: The
role of land use systems at various scales in time. Ecological Indicators, 5, 305–313.
Calabrese, J. M., & Fagan, W. F. (2004). A comparison-shopper’s guide to connectivity metrics.
Frontiers in Ecology and the Environment, 2(10), 529–536.
Castilho, C. S., Marins-Sá, L. G., Benedet, R. C., & Freitas, T. O. (2011). Landscape genetics of
mountain lions (Puma concolor) in southern Brazil. Mammalian Biology, 76(4), 476–483.
Chardon, J. P., Adriaensen, F., & Matthysen, E. (2003). Incorporating landscape elements into a
connectivity measure: a case study for the Speckled wood butterfly (Pararge aegeria L.).
Landscape Ecology, 18(6), 561-573.

128
Clay, J. (2004). World Agriculture and the Environment: A Commodity-by-Commodity Guide to
Impacts and Practices. Island Press, Washington, DC.
Coffin, A. (2007). From roadkill to road ecology: A review of the ecological effects of roads.
Journal of Transport Geography, 15(5), 396–406.
Congdon, J. D., Dunham, A. E., & van Loben Sels, R. C. (1993). Delayed sexual maturity and
demographics of Blanding’s Turtles (Emydoidea blandingii): Implications for conservation
and management of long-lived organisms. Conservation Biology, 7(4), 826–833.
Congdon, J. D., Graham, T. E., Herman, T. G., Lang, J. W., Pappas, M. J., & Brecke, B. J.
(2008). Conservation biology of freshwater turtles and tortoises. Conservation Biology of
Freshwater Turtles and Tortoises, No.5(IUCN Chelonian Research Foundation), 015.2–
015.12.
Congdon, J. D., Kinney, O. M., & Nagle, R. D. (2011). Spatial ecology and core-area protection
of Blanding’s Turtle (Emydoidea blandingii). Canadian Journal of Zoology, 89(11), 1098–
1106.
Edge, C. B., Steinberg, B. D., Brooks, R. J., & Litzgus, J. D. (2010). Habitat selection by
Blanding’s turtles (Emydoidea blandingii) in a relatively pristine landscape. Ecoscience,
17(1), 90–99.
Epps, C. W. (2007). Optimizing dispersal and corridor models using landscape genetics. Journal
of Applied Ecology, 44: 714 – 724.
Fahrig, L. (2007). Non-optimal animal movement in human-altered landscapes. Functional
Ecology, 21(6), 1003–1015.
Fahrig, L., & Merriam, G. (1994). Conservation of fragmented populations. Conservation
Biology, 8(1), 50-59.
Fahrig, L., & Rytwinski, T. (2009). Effects of roads on animal abundance : an empirical review
and synthesis. Ecology And Society, 14(1).
Forman, R. T. T. (1998). Road ecology: A solution for the giant embracing us. Landscape
Ecology, 13(4), iii–v.
Fortin, M. J., James, P. M., MacKenzie, A., Melles, S. J., & Rayfield, B. (2012). Spatial
statistics, spatial regression, and graph theory in ecology. Spatial Statistics, 1, 100–109.
Fortin, M.J., & Agrawal, A.A. (2005). Landscape Ecology Comes of Age. Ecology, 86:8, 1965-
1966.
Galpern, P., Manseau, M., & Fall, A. (2011). Patch-based graphs of landscape connectivity: A
guide to construction, analysis and application for conservation. Biological Conservation,
144(1), 44–55.
Gibbs, J. P., & Shriver, W. G. (2002). Estimating the Effects of Road Mortality on Turtle
Populations. Conservation Biology, 16(6), 1647–1652.

129
Grant, S.B., Rekhi, N.V., Pise, N.R., Reeves, R.L., Matsumoto, M., Wistrom, A., Moussa, L.,
Bay, S., Kayhanian, M.A., (2003). Review of the contaminants and toxicity associated with
particles in stormwater runoff. CTSW-RT-03-059.73.15. Caltrans, California Department
of Transportation, Sacramento, CA.
Hamernick, M. (2000). Home ranges and habitat selection of Blanding’s Turtles (Emydoidea
blandingii) at the Weaver Dunes, Minnesota. Chelonian Conservation and Biology, 3(4),
557–568.
Herman, T. B., J. S. Boates, D. C.;, S. Eaton, J. McNeil, S. Mockford, E. Alcorn, S. Bleakney,
M. Elderkin, J. Gilhen, C. Jones, J. Kierstead, J. Mills, I. Morrison, S. O'Grady, and D.
Smith. (2003). National Recovery Plan for the Blanding's turtle (Emydoidea blandingii)
Nova Scotia Population.
Howey, M. C. L. (2011). Multiple pathways across past landscapes: Circuit theory as a
complementary geospatial method to least cost path for modelling past movement. Journal
of Archaeological Science, 38(10), 2523–2535.
Jones, J.A., F.J. Swanson, B.C. Wemple, K.U. (2000). Snyder Effects of roads on hydrology,
geomorphology, and disturbance patches in stream networks. Conservation Biology,
14:76–85
Joyal, L. a., McCollough, M., & Hunter, M. L. (2001). Landscape Ecology Approaches to
Wetland Species Conservation: a Case Study of Two Turtle Species in Southern Maine.
Conservation Biology, 15(6), 1755–1762.
Kindlmann, P., & Burel, F. (2008). Connectivity measures: a review. Landscape Ecology,
23(September 2007), 879–890.
Lesbarrères, D., Ashpole, S. L., Bishop, C. a., Blouin-Demers, G., Brooks, R. J., Echaubard, P.,
… Lougheed, S. C. (2014). Conservation of herpetofauna in northern landscapes: Threats
and challenges from a Canadian perspective. Biological Conservation, 170, 48–55.
Magle, S. B., Hunt, V. M., Vernon, M., & Crooks, K. R. (2012). Urban wildlife research: Past,
present, and future. Biological Conservation, 155, 23–32.
Marchand, M. N., & Litvaitis, J. a. (2004). Effects of Habitat Features and Landscape
Composition on the Population Structure of a Common Aquatic Turtle in a Region
Undergoing Rapid Development. Conservation Biology, 18(3), 758–767.
McNeil, J. A., T. B. Herman, and K. L. Standing. (2000). Movement of hatchling Blanding's
Turtles (Emydoidea blandingii) in Nova Scotia in response to proximity to open water: A
manipulative experiment. Chelonian Conservation and Biology, 3:611–617.
McRae BH, Dickson BG, Keitt TH, Shah VB (2008). Using circuit theory to model connectivity
in ecology, evolution, and conservation. Ecology, 89: 2712–2724.
McRae, B. H., & Beier, P. (2007). Circuit theory predicts gene flow in plant and animal
populations. Proceedings of the National Academy of Sciences, 104(50), 19885-19890

130
McRae, B. H., Dickson, B. G., Keitt, T. H., & Shah, V. B. (2008). Using circuit theory to model
connectivity in ecology, evolution, and conservation. Ecology, 89(10), 2712–2724.
McRae, B.H. and D.M. Kavanagh. (2011). Linkage Mapper Connectivity Analysis Software.
The Nature Conservancy, Seattle WA. Available at:
http://www.circuitscape.org/linkagemapper.
Merriam, G. (1984). Connectivity: a fundamental ecological characteristic of landscape pattern.
In Methodology in landscape ecological research and planning: proceedings, 1st seminar,
International Association of Landscape Ecology, Roskilde, Denmark, Oct 15-19, 1984/eds.
J. Brandt, P. Agger.
Millar, C. S., & Blouin-Demers, G. (2011). Spatial Ecology and Seasonal Activity of Blanding’s
Turtles (Emydoidea blandingii) in Ontario, Canada. Journal of Herpetology, 45(3), 370–
378.
Moore, J. a., Tallmon, D. a., Nielsen, J., & Pyare, S. (2011). Effects of the landscape on boreal
toad gene flow: Does the pattern-process relationship hold true across distinct landscapes
at the northern range margin? Molecular Ecology, 20(23), 4858–4869.
Nuñez, T. a., Lawler, J. J., McRae, B. H., Pierce, D. J., Krosby, M. B., Kavanagh, D. M., …
Tewksbury, J. J. (2013). Connectivity Planning to Address Climate Change. Conservation
Biology, 27(2), 407–416.
Pascual-Hortal, L. & Saura, S. (2006). Comparison and development of new graph-based
landscape connectivity indices: towards the priorization of habitat patches and corridors for
conservation. Landscape Ecology, 21 (7): 959-967
Pascual-Hortal, L., Saura, S., (2008). Integrating landscape connectivity in broad-scale forest
planning through a new graph-based habitat availability methodology: application to
capercaillie (Tetrao urogallus) in Catalonia (NE Spain). European Journal of Forest
Research, 127, 23–31.
Paterson, J. E., Steinberg, B. D., & Litzgus, J. D. (2014). Effects of body size, habitat selection
and exposure on hatchling turtle survival. Journal of Zoology, 294(4), 278–285.
Pearson, R. G., Raxworthy, C. J., Nakamura, M., & Townsend Peterson, A. (2007). Predicting
species distributions from small numbers of occurrence records: a test case using cryptic
geckos in Madagascar. Journal of Biogeography, 34(1), 102-117.
R.A. Reed, J. Johnson Barnard, W.L. (1996). Baker Contribution of roads to forest fragmentation
in the rocky mountains Conservation Biology, 10, 1098–1106
Rayfield, B., Fortin, M.-J., & Fall, A. (2011). Connectivity for conservation: a framework to
classify network measures. Ecology, 92(4), 847–858.
Robertson, B.A. & Hutto, R.L. (2006) A framework for understanding ecological traps and an
evaluation of existing evidence. Ecology, 87, 1075–1085.

131
Ross, D. A., Anderson, R. K., Journal, S., & Mar, N. (1990). Habitat Use , Movements , and
Nesting of Emydoidea blandingi in Central Wisconsin. Journal of Herpetology, 24(1), 6–
12.
Saura, S. & Torné, J. (2009). Conefor Sensinode 2.2: a software package for quantifying the
importance of habitat patches for landscape connectivity. Environmental Modelling &
Software, 24: 135-139.
Saura, S., Estreguil, C., Mouton, C. & Rodríguez-Freire, M. (2011). Network analysis to assess
landscape connectivity trends: application to European forests (1990-2000). Ecological
Indicators, 11: 407-416.
Schumaker, N. H. (1996). Using Landscape Indices to Predict Habitat Connectivity. Ecology,
77(4), 1210–1225.
Schulte-Hostedde, G., Walters, D., Powell, C. & Shrubsole, D. (2007) Wetland management: An
analysis of past practice and recent policy change in Ontario. Journal of Environmental
Management, 82, 83-94).
Schwartz MK, Copeland JP, Anderson NJ et al. (2009) Wolverine gene flow across a narrow
climatic niche. Ecology, 90, 3222–3232.
Steen, D. A., Aresco, M. J., Beilke, S. G., Compton, B. W., Condon, E. P., Kenneth Dodd, C.,&
Gibbs, J. P. (2006). Relative vulnerability of female turtles to road mortality. Animal
Conservation, 9(3), 269-273.
Tischendorf, L., & Fahrig, L. (2000). On the usage and measurement of landscape connectivity.
OIKOS, 90(1), 7–19.
Van der Ree, R., Jaeger, J. a G., van der Grift, E. a., & Clevenger, A. P. (2011). Effects of roads
and traffic on wildlife populations and landscape function: Road ecology is moving toward
larger scales. Ecology and Society, 16(1).
Wang, I.J, Savage, WK, Shaffer, B (2009). Landscape genetics and least-cost path analysis
reveal unexpected dispersal routes in the California tiger salamander (Ambystoma
californiense). Molecular Ecology, 18:1365–1374
Zedler, J. B. (2003). Wetlands at your service: reducing impacts of agriculture at the watershed
scale. Frontiers in Ecology and Environment, 1(2), 65–72.
Zeller, K.A., McGarigal, K., & Whiteley, A. R. (2012). Estimating landscape resistance to
movement: a review. Landscape Ecology, 27(6), 777–797.

132
Chapter 5
Thesis Summary and Conclusion
Chapter Synthesis
A central objective of this dissertation was to unify the strengths of remote sensing science with
knowledge of species biology to obtain information on the population status of a declining and
data deficient species. Baseline information such as this has never been more important as
Earth’s surface is being increasingly altered and stressed by anthropogenic activities. Continual
modifications to the environment ensure that the relationship between organisms and their
surroundings will also be modified, and thus novel approaches are needed to model these
changes.
In Chapter Two I described a simple yet efficient methodology for mapping wetlands across
landscapes of varied heterogeneity. High spatial resolution satellite data and the GEOBIA
approach can be combined to provide a sound methodology for characterizing whole wetlands
and individual wetland classes. The GEOBIA approach specifically, was very appropriate for
wetland detection as it allowed for a nested multi-scale approach to constrain classification of
wetland components to within defined wetland boundaries. In regards to landscape variations, a
more heterogeneous landscape may negatively affect accurate wetland classification due to
increased spatial and compositional complexity. Specifically, rural landscapes presented
challenges due to the large proportion of vegetated upland classes of both anthropogenic and
natural origin that reduced segmentation accuracy and resulted in greater spectral overlap during
the classification. Multi-temporal data may be able to improve identification of spectrally similar
classes such as crops and wetland vegetation. As the science and value of wetland restoration
continues to grow, an effective method of delineating small wetlands from heterogeneous
landscapes is a necessity, particularly as wetland loss continues despite our increased
understanding of their ecological and societal importance.
With the ongoing global loss of habitat and continuing trend of species decline, novel methods of
obtaining information on species’ habitat requirements is warranted. Chapter Three evaluated the
statistical strength and usefulness of seasonal predictive habitat models, and found a high degree

133
of accuracy using the boosted regression tree approach and predictors derived from satellite-
imagery. Results further demonstrated that Blanding’s turtles exhibit a distinct shift in preferred
habitat over seasons and across both natural and altered landscapes, likely related to
physiological requirements and behavioural traits. Habitat associated with emergent and wet
meadow wetlands, as well as lower elevation was consistently selected across all models and
seasons. Biophysical characteristics related to microhabitat included selection of regions of high
vegetation cover and height during the early season and a closer association with standing water
and deeper waters during the late summer period. Overall findings from this study highlight the
dynamic choices that species make when selecting habitat locations that meet their needs, and
further draw attention to the dangers of assuming a static environment when modelling species
distribution.
Movement potential represents another aspect of species persistence on the landscape that is
affected by both intra-annual variation in land cover, and heterogeneity from human-oriented
disturbances. Chapter Four demonstrates that there are many dynamic variables and processes
that affect connectivity for Blanding’s turtles in fragmented landscapes. These changes in
movement potential and habitat importance are likely a consequence of shifting habitat and
changing behavioural drivers that are especially noticeable in altered landscapes, and for species
who are tied to dynamic ecosystems such as wetlands. This study supports the application of
multiple approaches to visualizing and quantifying connectivity to produce results that can
address different aspects of a species’ behavioural, and physiological needs including individual
plasticity, and age-specific and gender specific traits. Regardless of season, roads bisected a large
proportion of estimated least-cost pathways and circuit-based corridors. Roads represent a major
barrier to wildlife movement (Coffin, 2007) which greatly reduce the permeability of any
landscape where they are found. While Blanding’s turtles exhibit a relatively tolerant range to a
variety of environmental conditions, suggesting they could be resilient in the face of a warming
trend, the extensive modification of the landscape that has occurred and continues to occur
across much of southern Ontario indicates that dispersal events may be highly restrictive and
generally unsuccessful.

134
Management Applications and Future Direction
There is little doubt that organisms on this planet are declining at a rate faster than we are able to
detect, and results from this work substantiates the capability of remote sensing technology for
contributing information needed to assess data deficient and declining species. A major gap
exists however, in linking the results of research such as this with conservation practitioners and
government and non-government stakeholders who are responsible for managing landscape level
policy that will ultimately decide the fate of species such as Blanding’s turtles. To that end, I
have attempted to bridge this divide through collaboration with relevant organizations in need of
results from work such as this, however challenges still remain in reconciling conflicting agendas
and lack of funds for conservation work. While all efforts were made to use tools that are
publically available, the nature of remote sensing and GIS research is that numerous programs
are often employed to complete various tasks, and some of these will be proprietary (e.g.,
ArcMap, ENVI). While this may be daunting, the increasing availability of open source software
means that conservation practitioners can gain access to an increasing array of tools to apply to
their work.
Overall, several general conclusions and recommendations can be derived from results of this
work and applied to land management decisions and conservation strategies. In areas where a
wetland inventory does not previously exist, a GEOBIA approach to mapping these ecosystems
is recommended to provide baseline information from which to answer basic land management
questions. The ability to detect small and ephemeral wetlands through this approach may provide
an avenue for the inclusion of wetlands < 2 ha into the Ontario Wetland Evaluation System
(OWES) which is the first step in assigning protection to these currently unprotected wetlands.
From an even broader perspective, land cover mapping is not limited to wetlands, and this
approach can be applied to virtually any type of key habitat and using any type of digital
imagery. The key is to employ a species-centred approach to land cover mapping such that
appropriate landscape features are captured, and that scale of the map matches that of the species
in question. This base information can be used to derive a whole suite of complementary
information needed to adequately address issues of threatened species decline.
The habitat identified in Chapter Three represents an effective method of providing baseline
information on species occupancy, and for monitoring changes to available habitat. But

135
identification of habitat is only the first, though critical, step in managing wildlife populations.
Greater protection of preferred habitat is required along with an understanding of the importance
of the surrounding landscape. The use of the term buffers, or strips of land surrounding a target
habitat such as wetlands, may be misleading as these areas can actually represent locations of
biological importance for semi-aquatic species which carry out critical life-history functions such
as nesting, overwintering or foraging. Similarly, upland linkages between wetland mosaics
characterize equally important habitat needed for dispersal, immigration, recolonization and gene
flow, without which many meta populations would be doomed to isolation and eventual local
extinction.
The general trend in connectivity-related mitigation is the construction of an ecopassage after
high incidences of animal mortality are noted along a particular area, most often a road. While
the installation of the ecopassage and associated structures such as exclusion fencing fulfil a
necessary action to mitigate further mortality, we need to shift our policy to either (i) install the
ecopassage structure before high incidences of mortality occur, and for which species occupancy
models and patch-based connectivity indices can help identify such locations, or (ii) to divert
transportation networks away from critical habitat, as road mortality is only one of a series of
negative consequences of roads. In order to drive this shift in policy, road planning agencies
should place a higher priority on maintaining natural landscape connectivity, and ecologists need
to work more closely with planners to provide the necessary scientific information (e.g.,
developing habitat maps, modelling movement, estimating population viability) to guide road-
construction. Furthermore, landowners need to better understand how their properties can play a
larger role in providing critical habitat and linking corridors for an array of wildlife species in all
types of landscapes. These are daunting tasks, as conflicting priorities, lack of funds, and
understanding can generally impede successful collaboration. Fortunately, awareness of the
importance and inherent value of biodiversity and green spaces in our society continues to rise,
and we can only hope that public perspectives and government attitudes can shift in time to
prevent the loss of further species.
Future work building on results of this dissertation include the estimation of population viability
analysis for turtle populations in my fragmented study sites. A logical next step after identifying
habitat and landscape connectivity potential is to predict population stability and time to
extinction under different management scenarios. The ability to simulate different changes to

136
landscapes (both positive and negative) and the resulting effect on turtle populations can provide
further science-based information for setting conservation priorities.
So, does slow and steady win the race?
It may be too early to tell, but turtles have lumbered across this planet for almost 300 million
years proving they are far more resourceful than their cumbersome shell may imply. With just a
little bit of help, they may persist long into the future.

137
APPENDIX
Figure A1. Continuous % vegetation cover raster map derived from high spatial
resolution GeoEye1 imagery (NDVI) and field-based measurements over the spring
Algonquin park study site (a) and subset in white square and (b).
Figure A2. Continuous % vegetation cover raster map derived from high spatial
resolution GeoEye1 imagery (NDVI) and field-based measurements over the spring
Algonquin park study site (a) and subset in white square and (b).

138
Figure A3. Continuous water depth raster map derived from high spatial resolution
GeoEye1-imagery (relative water depth algorithm) and field-based measurements. Late
summer Algonquin Provincial Park study area (left) and subset locations shown in white
squares, and boxes (a) and (b).
Figure A4. Continuous water depth raster map derived from high spatial resolution
GeoEye1-imagery and field-based measurements. Algonquin Provincial Park study
area, late summer.

139
Table B1. Sensitivity Analysis on map accuracy of habitat suitability maps set at
threshold values of 0.4 - 0.8
Binary
Threshold
Spring Map
Accuracy (%)
Summer Map
Accuracy (%)
Park site (Algonquin
Park)
0.4 95.97 78.17
0.5 93.08 72.56
0.6 90.78 65.49
0.7 85.01 50.73
0.8 78.67 36.38
Agricultural site (Brant
County)
0.4 98.74 88.11
0.5 98.74 88.11
0.6 97.49 87.80
0.7 95.73 87.80
0.8 91.46 86.89
Figure A5. Continuous map of percent vegetation cover estimated from high spatial
resolution GeoEye1-derived NDVI over the Brant County agricultural study area during the
spring season.

140
Table B2. Expert-based resistance values for the spring and late summer season used in least-cost
and circuit theory models.
Land cover Expert
1
Expert
2
Expert
3
Spring
Average
Expert
1
Expert
2
Expert
3
Summer
Average
Wetland
(emergent marsh 0 0 0 0 0 50 40 30
Wetland (wet
meadow marsh) 30 2.5 15 16 50 45 50 48
Wetland
(swamp) 2.5 2.5 15 7 20 26 20 22
Open water 0 0 0 0 0 0 0 0
Mixed forest 35 60 40 45 57.5 60 40 52
Mixed meadow 40 53 35 42 57.5 52.5 40 50
Crop field
(closed canopy) 40 40 30 36 84.5 49 65 66
Crop field
(barren) 20 100 30 50 52.5 100 30 61
Road 75 94 58 76 90 96.5 90 92
Residential
parcel 63 58 93 71 64.5 62 75 67



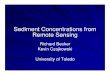























![[REMOTE SENSING] 3-PM Remote Sensing](https://img.pdfslide.us/doc/110x75/61f2bbb282fa78206228d9e2/remote-sensing-3-pm-remote-sensing.jpg)

