Embed Size (px)
Citation preview
A Multi-Agent Systems Based Conceptual Ship Design Decision Support System
The Ship Stability Research Centre
Department of Naval Architecture and Marine Engineering Universities of Glasgow and Strathclyde
Bekir S. Türkmen
• Design Exploration and Support
• Distributed Architecture
• Encapsulation of Design Experience
Motivations
What is an agent?
An Agent : one that acts or has the power or authority to act or represent another.
An Intelligent Agent is the agent does the things rationally in a given situation (Russell 1995)

Intelligent Agents
• Autonomy• Collaborative Behaviour • Adaptivity • Mobility• Proactivity• Reactivity

Multi-Agent Systems

MAS- Three Important Questions
• Communication
• Control
• Co-ordination, Collaboration, Negotiation
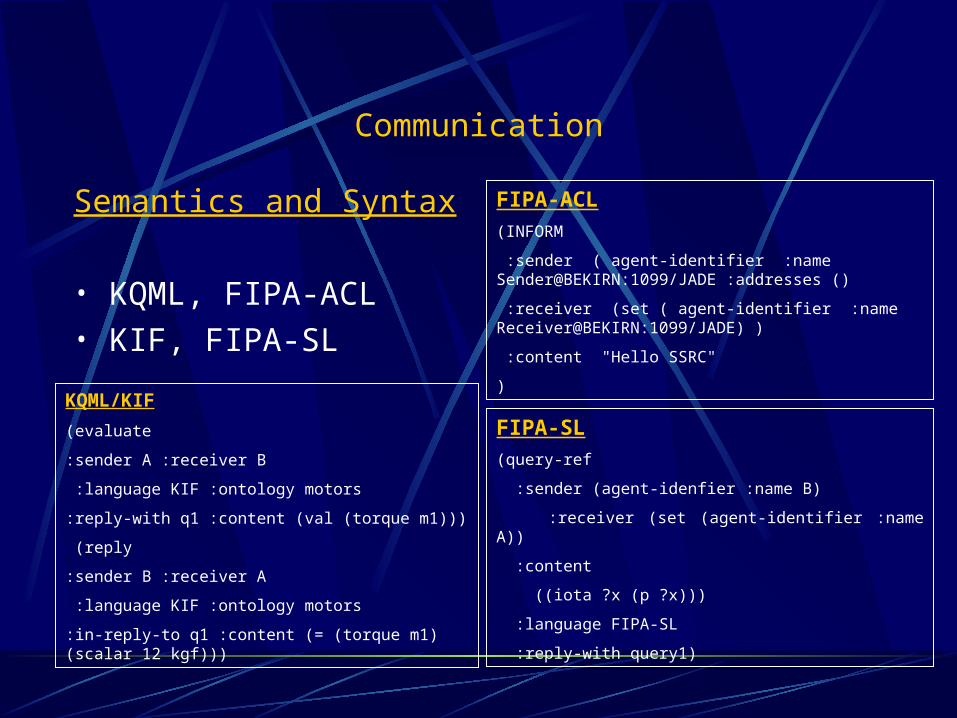
Communication
Semantics and Syntax
• KQML, FIPA-ACL• KIF, FIPA-SL
FIPA-ACL
(INFORM
:sender ( agent-identifier :name Sender@BEKIRN:1099/JADE :addresses ()
:receiver (set ( agent-identifier :name Receiver@BEKIRN:1099/JADE) )
:content "Hello SSRC"
)
FIPA-SL
(query‑ref
:sender (agent-idenfier :name B)
:receiver (set (agent-identifier :name A))
:content
((iota ?x (p ?x)))
:language FIPA-SL
:reply‑with query1)
KQML/KIF
(evaluate
:sender A :receiver B
:language KIF :ontology motors
:reply-with q1 :content (val (torque m1)))
(reply
:sender B :receiver A
:language KIF :ontology motors
:in-reply-to q1 :content (= (torque m1) (scalar 12 kgf)))
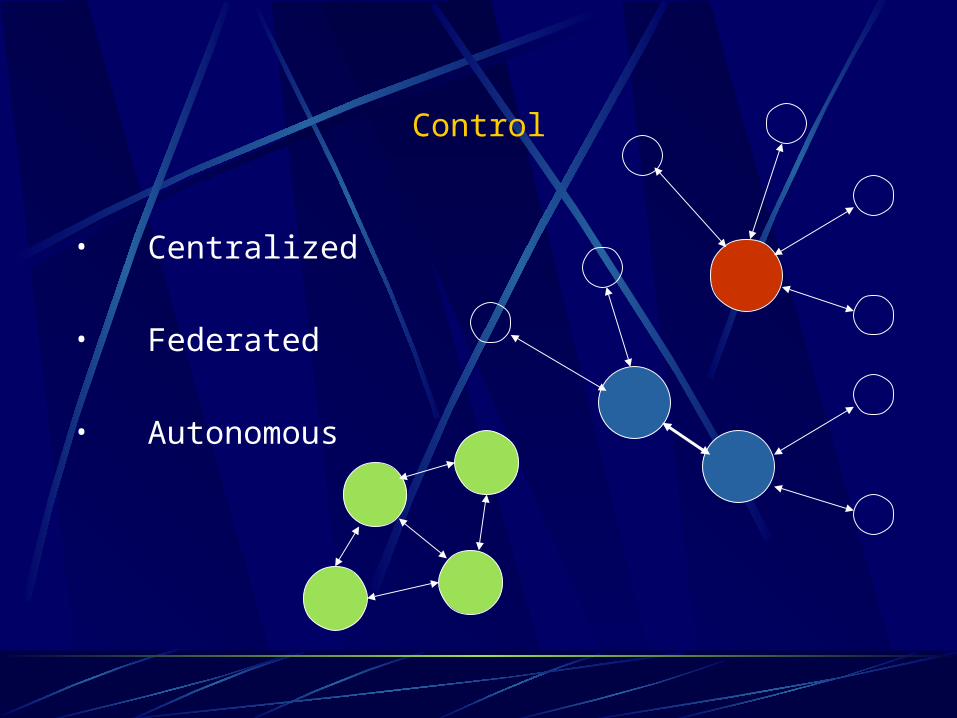
Control
• Centralized
• Federated
• Autonomous
Co-ordination
Auctions
Contract-Net (Task Sharing)
Planning
Game Theory
Argumentation
Catalogue of Conflicts
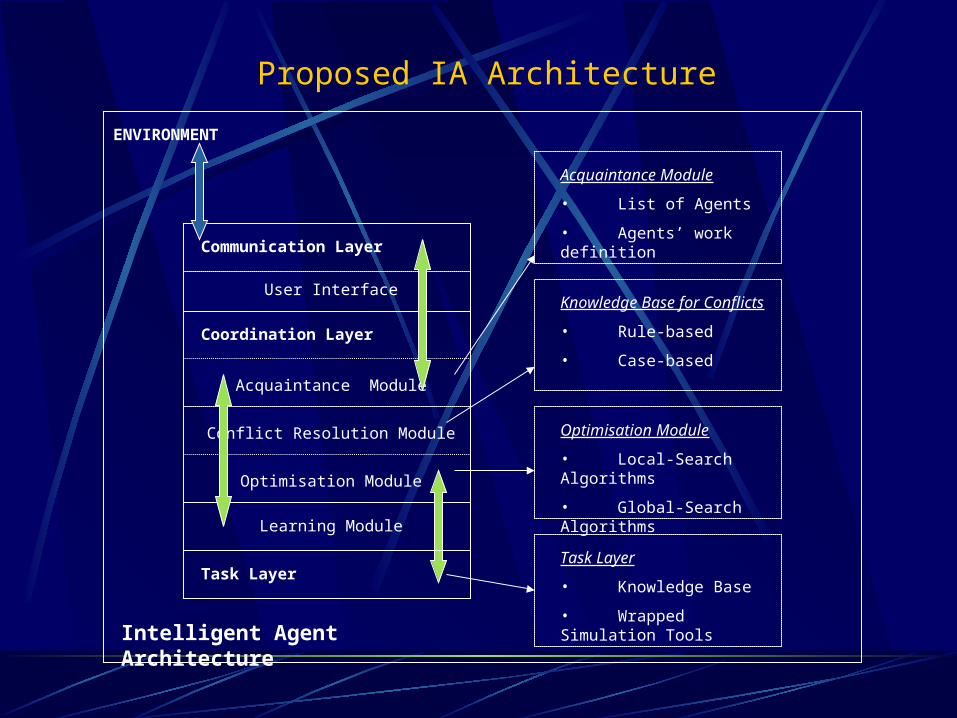
Proposed IA Architecture
Communication Layer
Coordination Layer
Conflict Resolution Module
Optimisation Module
Knowledge Base for Conflicts
• Rule-based
• Case-based
Optimisation Module
• Local-Search Algorithms
• Global-Search Algorithms
Learning Module
Task Layer
ENVIRONMENT
Acquaintance Module
Task Layer
• Knowledge Base
• Wrapped Simulation Tools
Acquaintance Module
• List of Agents
• Agents’ work definition
Intelligent Agent Architecture
User Interface
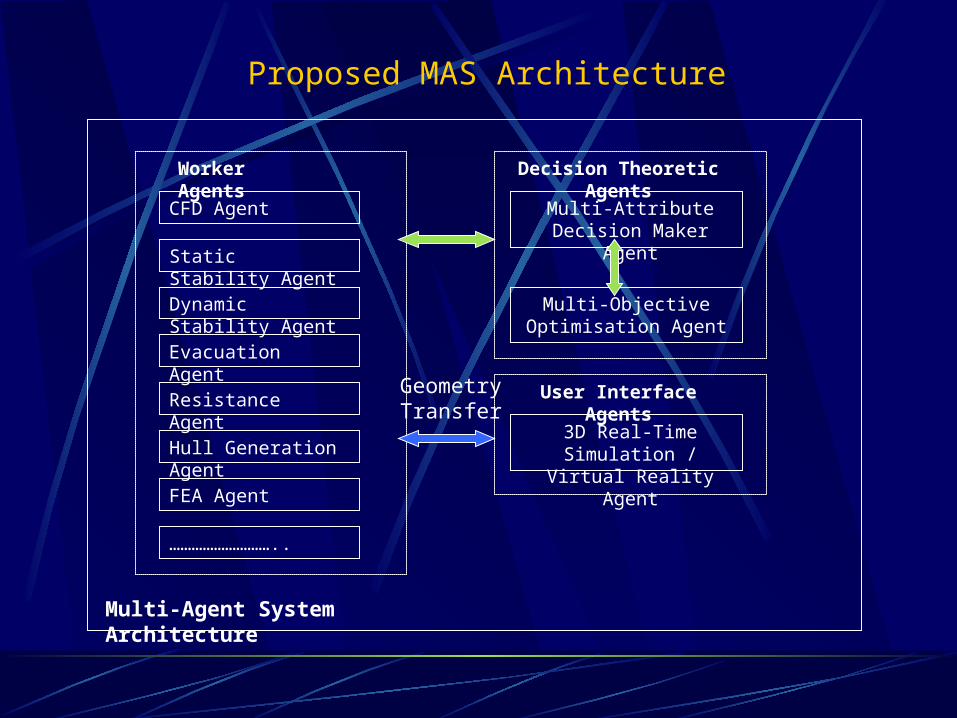
Proposed MAS Architecture
Static Stability Agent
Dynamic Stability Agent
Evacuation Agent
Resistance Agent
Hull Generation Agent
CFD Agent
FEA Agent
Worker Agents
Multi-Objective Optimisation Agent
Multi-Attribute Decision Maker Agent
Decision Theoretic Agents
3D Real-Time Simulation / Virtual Reality Agent
User Interface AgentsGeometry Transfer
Multi-Agent System Architecture
………………………..
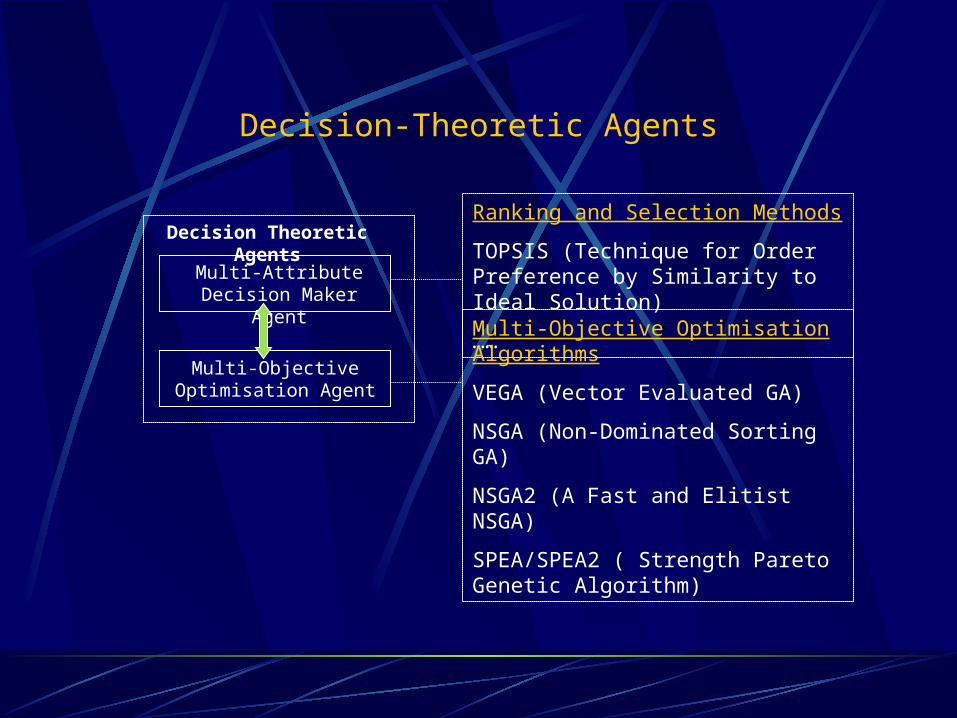
Decision-Theoretic Agents
Multi-Objective Optimisation Agent
Multi-Attribute Decision Maker Agent
Decision Theoretic Agents Ranking and Selection Methods
TOPSIS (Technique for Order Preference by Similarity to Ideal Solution)
……
Multi-Objective Optimisation Algorithms
VEGA (Vector Evaluated GA)
NSGA (Non-Dominated Sorting GA)
NSGA2 (A Fast and Elitist NSGA)
SPEA/SPEA2 ( Strength Pareto Genetic Algorithm)
Multi-Objective Optimisation
• Decision-Making Before Search
• Decision-Making After Search
• Decision-Making during Search
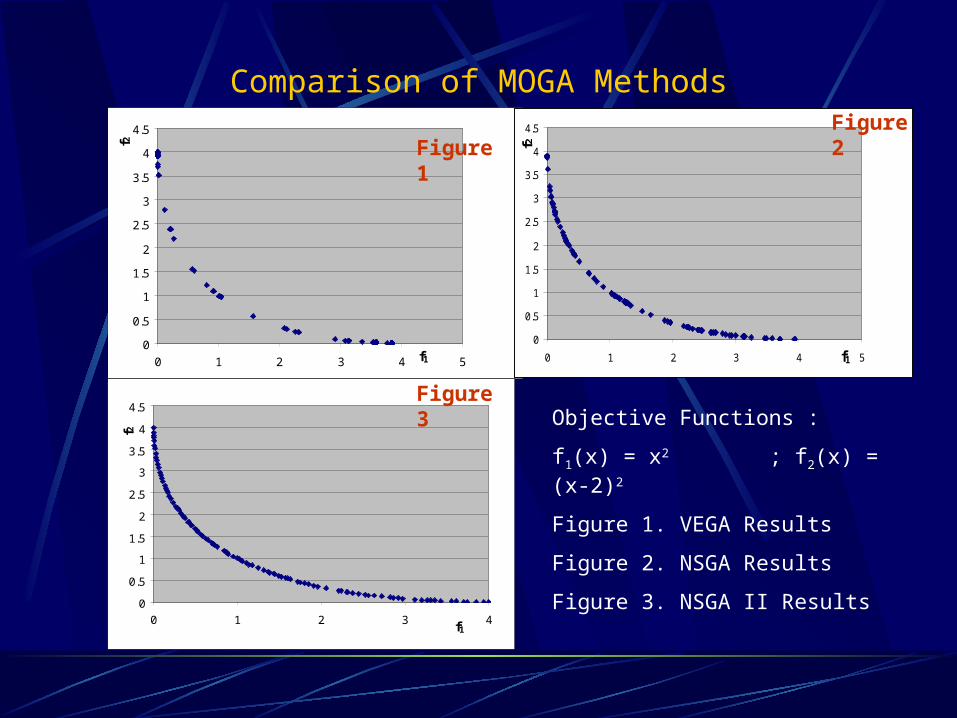
Comparison of MOGA Methods
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1 2 3 4 5f1
f 2
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1 2 3 4 5f1
f 2
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1 2 3 4f1
f 2
Objective Functions :
f1(x) = x2 ; f2(x) = (x-2)2
Figure 1. VEGA Results
Figure 2. NSGA Results
Figure 3. NSGA II Results
Figure 1
Figure 3
Figure 2
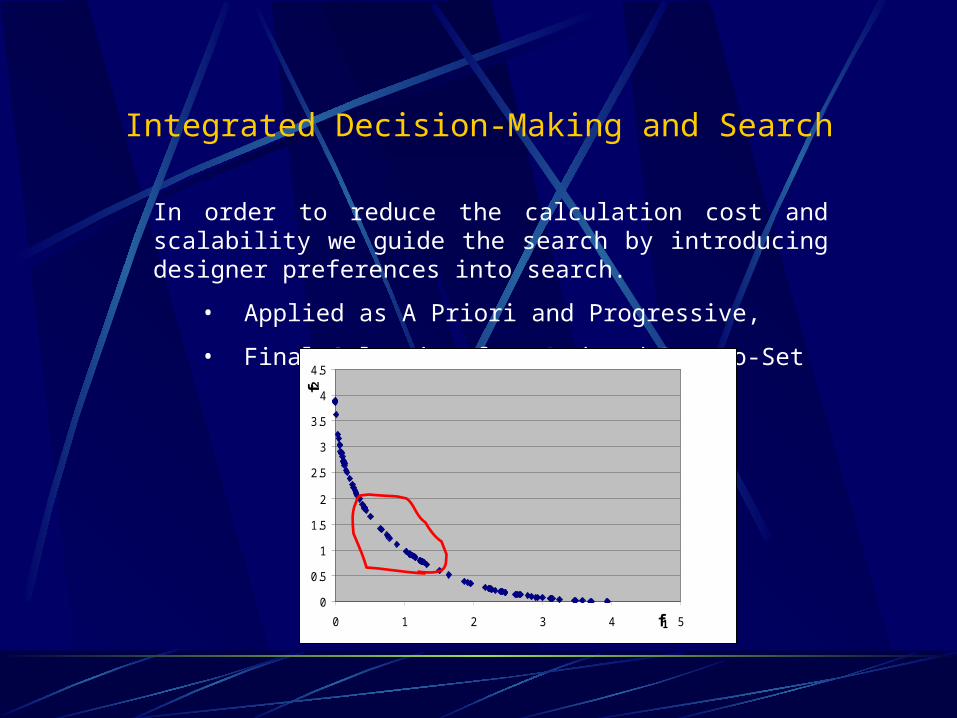
Integrated Decision-Making and Search
In order to reduce the calculation cost and scalability we guide the search by introducing designer preferences into search.
• Applied as A Priori and Progressive,
• Final Selection from Reduced Pareto-Set
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1 2 3 4 5f1
f 2
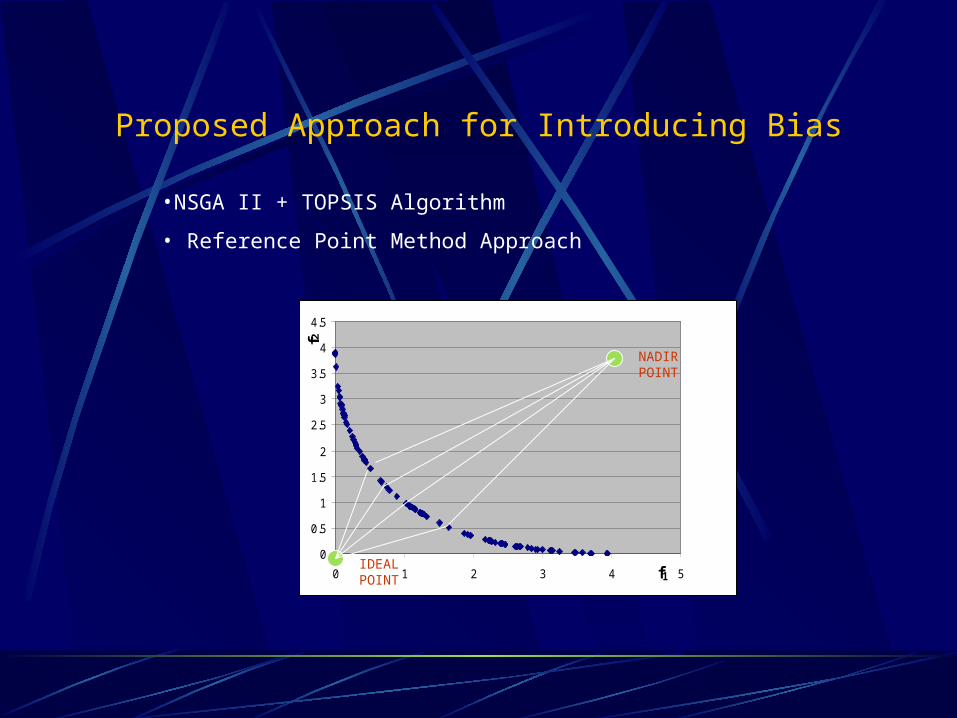
Proposed Approach for Introducing Bias
•NSGA II + TOPSIS Algorithm
• Reference Point Method Approach
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1 2 3 4 5f1
f 2
NADIR POINT
IDEAL POINT
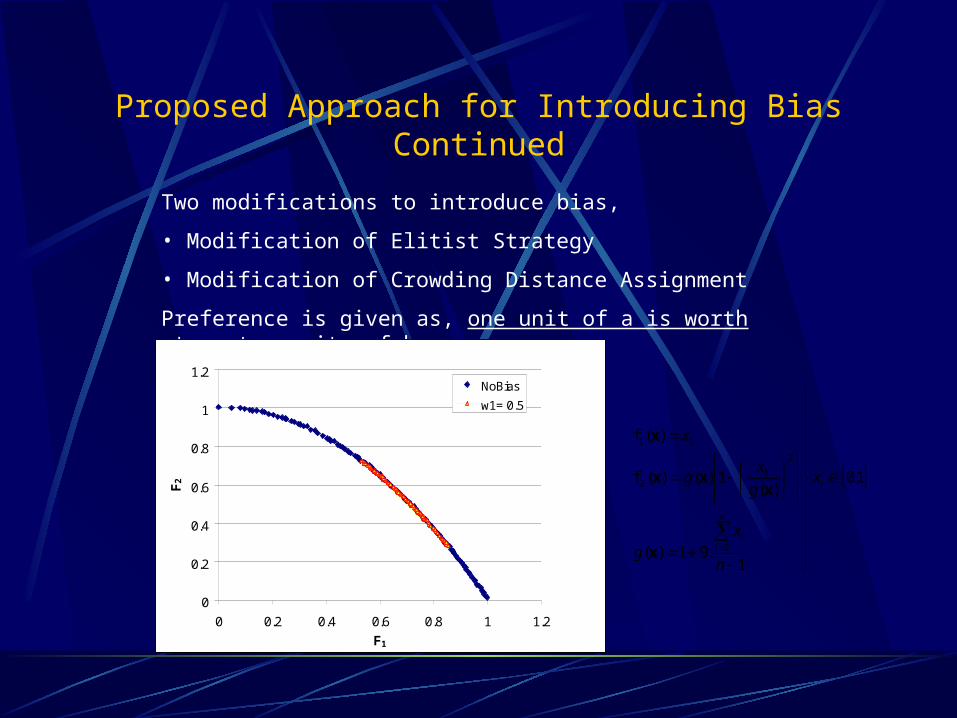
Proposed Approach for Introducing Bias Continued
Two modifications to introduce bias,
• Modification of Elitist Strategy
• Modification of Crowding Distance Assignment
Preference is given as, one unit of a is worth at most x units of b
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1 1.2
F1
F2
NoBias
w1= 0.5
1,0
1.91)(
)(1)()(f
)(f
2
2
12
11
i
n
ii
x
n
xg
g
xg
x
x
xxx
x
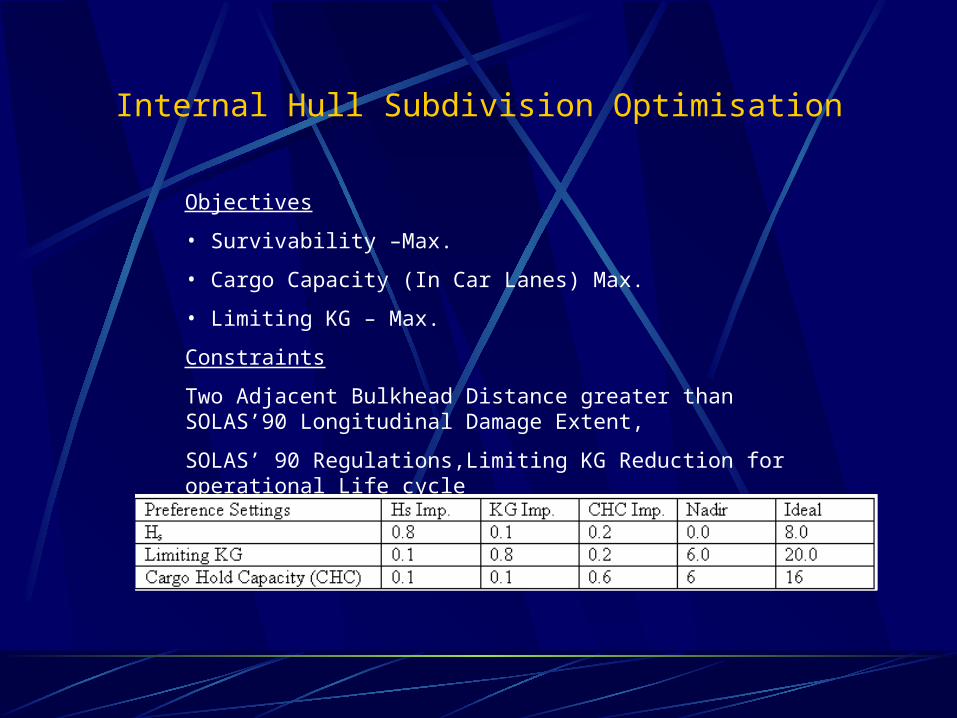
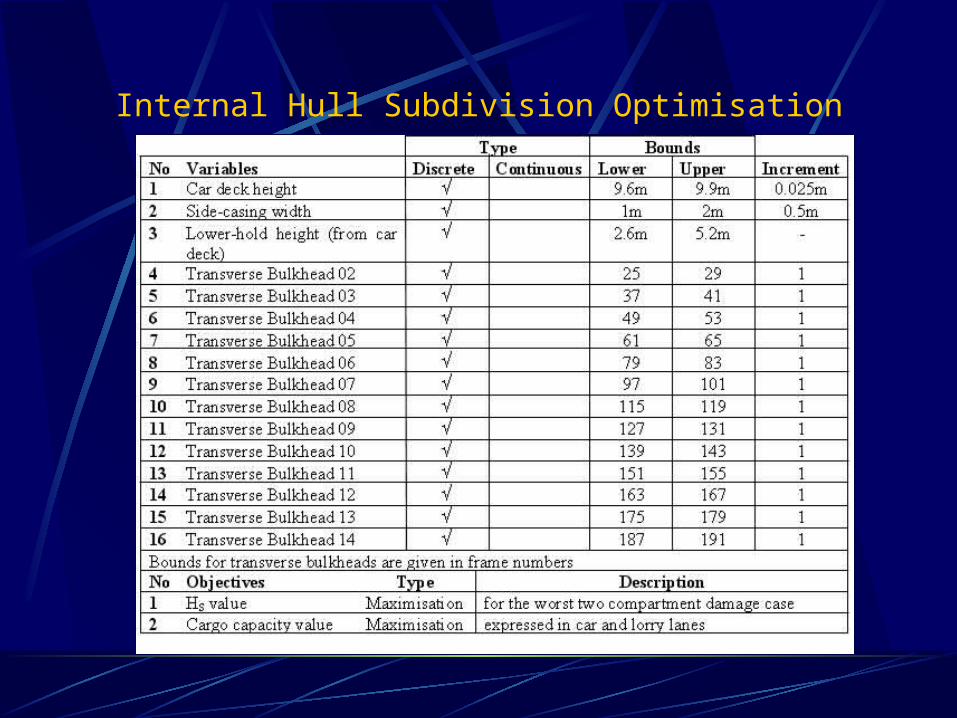
Internal Hull Subdivision Optimisation
Objectives
• Survivability –Max.
• Cargo Capacity (In Car Lanes) Max.
• Limiting KG – Max.
Constraints
Two Adjacent Bulkhead Distance greater than SOLAS’90 Longitudinal Damage Extent,
SOLAS’ 90 Regulations,Limiting KG Reduction for operational Life cycle
Internal Hull Subdivision Optimisation
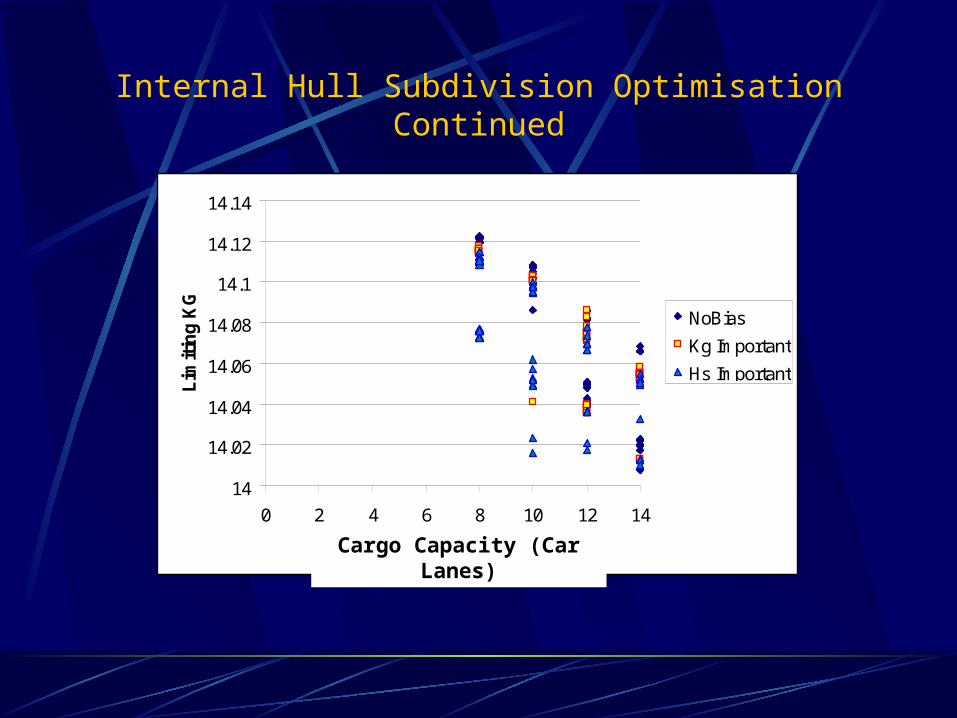
Internal Hull Subdivision Optimisation Continued
14
14.02
14.04
14.06
14.08
14.1
14.12
14.14
0 2 4 6 8 10 12 14
Cargo Hold Capacity
Lim
itin
g K
G
NoBias
Kg Important
Hs Important
Cargo Capacity (Car Lanes)
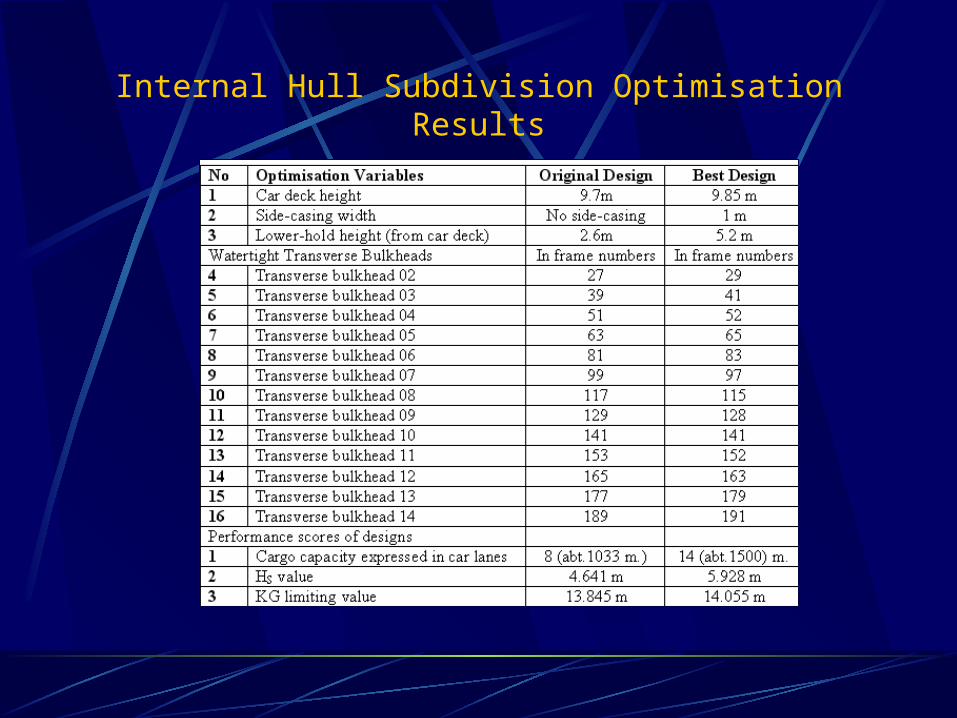
Internal Hull Subdivision Optimisation Results

Distributed Optimisation Test Problem in A Multi-Agent Systems
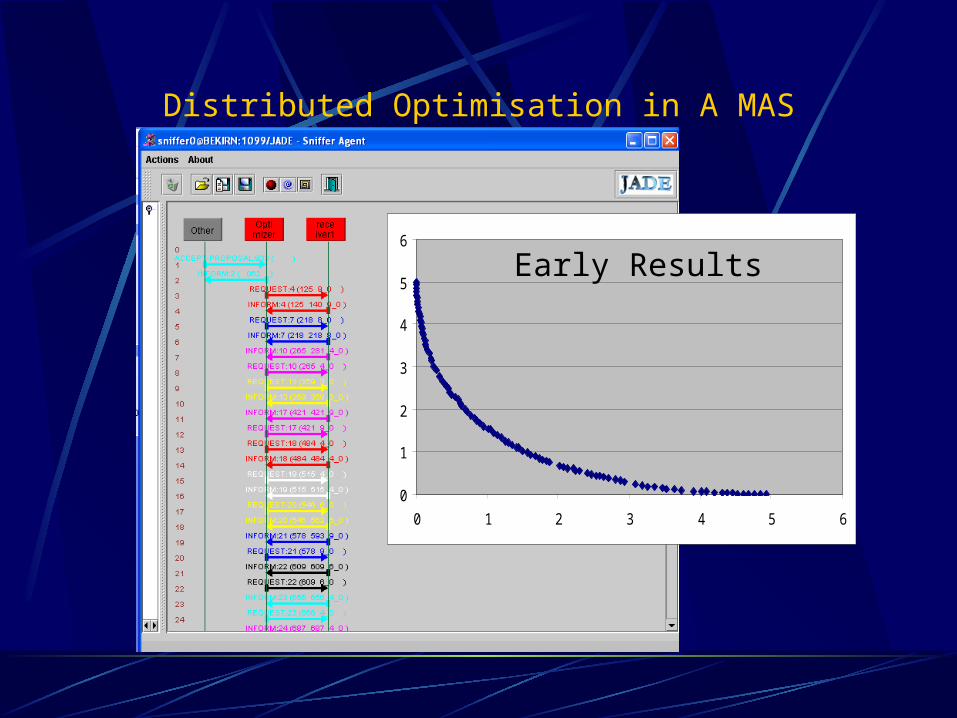
Distributed Optimisation in A MAS
0
1
2
3
4
5
6
0 1 2 3 4 5 6
Early Results
Conclusions and Future Development
Advantages of proposed approach
• Distributed Computation (Less computation time)
• Distribution of Expertise (Intelligent Agent Architecture)
• Integrated Multi-Criteria Decision-Making and Decision Support Environment.
Future Research
Integration with CAD Environment
Case Study for Intelligent Agents in Multi-Agent Systems
Questions