Embed Size (px)
Citation preview

Scholars' Mine Scholars' Mine
Doctoral Dissertations Student Theses and Dissertations
1969
A method for determining transient stability in power systems A method for determining transient stability in power systems
Charles A. Gross Missouri University of Science and Technology
Follow this and additional works at: https://scholarsmine.mst.edu/doctoral_dissertations
Part of the Electrical and Computer Engineering Commons
Department: Electrical and Computer Engineering Department: Electrical and Computer Engineering
Recommended Citation Recommended Citation Gross, Charles A., "A method for determining transient stability in power systems" (1969). Doctoral Dissertations. 2105. https://scholarsmine.mst.edu/doctoral_dissertations/2105
This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected].

METHOD FOR DETERMINING
IN POWER SYSTE~~
by
CHARLES ARTHUR 7
A DISSERTATION
Presented the Faculty of the Graduate School of the
UNIVERSITY OF - ROLLA
In Partial Ful llment of for the Degree
DOCTOR PHILOSOPHY
ELECTRICAL

PLEASE NOTE: Appendix pages are not original copy. Print is indistinct on many pages. Filmed in the best possible way.
UNIVERSITY MICROFILMS.

ABSTRACT
Given a three phase ac power system consisting of
synchronous alternators interconnected by transmission
lines and other items of electrical transmission equip
ment, a method is presented which determines the stability
of the system when subjected to a three phase symmetrical
fault, and to the subsequent clearing of the fault. It is
inherent in the method that an estimation of system
stability, assuming an instantaneous clearing of the
fault, is available. The critical clearing time is there
fore determined. The effect of a speed control loop on
the system's largest machine is investigated. The method
is applied to two, three, four, and seven machine examples.
Advantages and disadvantages of the method are discussed.
ii

iii
PREFACE
In the last several years theoretical development of
the powerful methods of modern control mathematics, coupled
with the technological advances of the high speed digital
computer, has stimulated renewed researches into the
problems of power systems. It is difficult to overstate
the importance of investigations in this area; one needs
only to contemplate the consequences of a massive power
failure to appreciate this. It is sincerely hoped that this
work will serve as a small contribution to the overall
research effort currently under way.
Acknowledgement of the help obtained from others in
the preparation of this dissertation is appropriate.
Professor George McPherson, Dr. J. L. Rivers, and
Dr. T. L. Noack supplied invaluable technical assistance.
The Computer Science Department was most cooperative, and
Mrs. Muriel Johnson typed the final draft. Finally, the
author wishes to extend special thanks to his wife Dorothy
for her understanding and moral support during the prepara
tion of this paper.

iv
TABLE OF CONTENTS
Page
ABSTRACT . ..•...•........•.......•..•....•....•••....•.•••• ii
PREFACE ••.•••••••••....••. .••...•.•••.••••.•..•...•..•••. iii
LIST OF ILLUSTRATIONS •...••.......•••.•....•...••....•..•.. v
LIST OF TABLES . .......................•.•............... viii
I. INTRODUCTION . ...............................•..•..... 1
II. REVIEW OF THE LITERATURE ••.••••.•••••..••••••...••••• 8
III. DISCUSSION OF ASSUMPTIONS AND APPROXIMATIONS •••••••• 21
IV. STATEMENT OF THE PROBLEM ••••••••••.••.•••••.•..••••• 35
V. PRESENTATION OF THE SOLUTION •••.•••••••••••••••••••• 38
VI. APPLICATION OF THE METHOD •.••••.••••....••..•••••.•• 53
VII. CONCLUSIONS •••.......••...••.•..••••...•..•.•..••.•• 91
BIBLIOGRAPHY . ......•.....••...••..•••..•••.•••••••.••••••• 9 4
GLOSSARY OF COMPUTER NOTATION ••..•••••.•••.•••••••••.••••• 98
APPENDIX A. DETERMINATION OF THEY MATRIX .•••••••••••••• lOl
APPENDIX B. COMPUTATION OF THE EQUILIBRIUM STATES
USING THE NEWTON-RAPHSON METHOD ••••.••.•...• l06
APPENDIX C. SOLUTION OF THE SWING EQUATION BY THE
RUNGE-KUTTA METHOD ••.•••.••.•.•..•••.••.••.• ll5
VITA . ........••..•..........................•.••......... 137

LIST OF ILLUSTRATIONS
Page
Figure 1-1. Approximate Equivalent Circuit for
Synchronous Machine ....................•.....• l
Figure 1-2. Illustrative Example: Single Machine
Coupled Through x to an Infinite Bus .........• 5
Figure 1-3. Graphical Interpretation of the Problem ....... 5
Figure 3-1. Per-Phase Equivalent Circuit of an
Alternator . .................................. 22
Figure 3-2. Transient Phase Current of a Shorted
Figure 3-3.
Figure 5-l.
Figure 5-2.
Figure 6-1.
Figure 6-2.
Figure 6-3.
Figure 6-4.
Generator with de Component Removed ........•. 24
Speed Control Block Diagrarn .•..•............. 30
The General Power System ..............•...... 38
The Two Equilibria o8 and ou .•..•........•... 47
Single Line Diagram ...•....••...............• 54
Per- Phase Circuit Diagram ....•.........•.•... 54
System for Example I ....•................•.•. 58
Stable Swing Curve for Example I:
No Speed Control .•........................... 61
Figure 6-5. Unstable Swing Curve for Example I:
No Speed Control ............•....••.......... 62
Figure 6-6. Stable Swing Curve for Example I:
Speed Control ..........•.•.....•.•.........•. 63
Figure 6-7. Unstable Swing Curve for Example I:
Speed Control ••..••••••••••••••..••.••••••••. 64
v

Figure 6-8 (a) .
Figure 6-8 (b) .
Figure 6-8 {c).
Figure 6-9.
Figure 6-10.
Figure 6-11.
Figure 6-12.
Figure 6-13.
Figure 6-14.
Figure 6-15.
Figure 6-16.
Figure 6-17.
Figure 6-18.
Figure 6-19.
Figure 6-20.
Figure 6-21.
vi
System for Example II - Pre-Fault •..•••...• 66
System for Example II - Faulted •......•.... 67
System for Example II - Post-Fault ........• 68
Stable Swing Curve for Example II:
No Speed Control •..•.•••••..••••.••••••••.• 72
Unstable Swing Curve for Example II:
No Speed Control ...•...••.•.••••.•..••..••• 73
Stable Swing Curve for Example II:
Speed Control ...••.•.••.•..•.•••..•.•.••..• 74
Unstable Swing Curve for Example II:
Speed Control . ............................. 7 5
System for Example III •.••..••••••••••••••• 78
Stable Swing Curve for Example III:
No Speed Control •..••......••.••.••.•.••••• 79
Unstable Swing Curve for Example III:
No Speed Control (Second Cycle) •••..•.•••.• 80
Unstable Swing Curve for Example III:
No Speed Control {First Cycle) ..•••..•.•••• 81
Stable Swing Curve for Example III:
Speed Control .........•.•.•...•..•..••••.•• 82
Unstable Swing Curve for Example III:
Speed Control ...•.....••.••..•..•....•..... 83
System for Example IV .......•.............. 86
Stable Swing Curve for Example IV:
No Speed Contro1 ........................... 87
Unstable Swing Curve for Example IV:
No Speed Control ••.•..••••••••••••.•••••.•• aa

vii
Figure 6-22. Stable Swing Curve for Example IV:
Speed Control .....••••••••••••.•.•...•.••• 89
Figure 6-23. Unstable Swing Curve for Example IV:
Speed Control .•...•.••.•..•••••••.•••••••• 90

Table 6-1.
Table 6-2.
Table 6-3.
Table 6-4.
Table 6-5.
Table 6-6.
Table 6-7
Table C-1.
viii
LIST OF TABLES
Page
Machine Data for Example I .••.••.•...•.•....• 57
Machine Data for Example II ••.•...••.•.••..•• 69
Results for Example II •..••••••••.•.••••••••• 71
Machine Data for Example III •....•.••...••... 76
Results for Example III ..••••.••••••.•••••••• 77
Machine Data for Example IV .••••••••.•••••••• 84
Results for Example IV •..••••.•••••..•.•.•••• 85
Flow Table for Runge-Kutta Prograrn ••••.••••• ll9

l
CHAPTER :I
INTRODUCTION
The electrical and mechanical dynamic equations of the
synchronous machine lie at the heart of the stability
problem in electrical power systems. Proper discussion
and justification of the assumptions and approximations
that are necessary in the derivation of a mathematical model
for the machine are deferred until Chapter III so that the
essence of the stability problem might be explained at the
outset.
The synchronous machine may be modelled approximately
by the circuit shown in Figure 1;...1.·
+ r
e.LQ.:_ = e
Figure 1-1. Approximate Equivalent Circuit for Synchronous
Machine
The electrical power output of the circuit is:
P = Re [e I'*l
eff.:! - e/0° = Re [e( -)*]
x/90°

2
eef 2 p Re /90°-o e /90°] = [- - -
X X
Re eef
[cos (90°-o) j sin(90°-o)J] = [- + X
eef sin 0 p sin 0 (1-1) = = X max
where
-o = angle by which ef leads e in phase.
ef = ef/o = phasor voltage behind transient
reactance.
e = e/0° = phasor terminal voltage.
X = transient synchronous reactance.
The angle o has a physical significance as well as an
electrical interpretation. It is the spatial angle
between the rotor field and the revolving air-gap field,
ignoring stator leakage flux. A positive value of o means
that the rotor field is leading the air-gap field and power
flow is into the external electrical network, i.e., the
machine is generating. The energy conversion process is
reversible; o may be negative. Then power flow is from the
electrical network to the mechanical load, and the machine
is then motoring. Define the mechanical power into the
machine to be U. Ignoring losses, in the steady state:
u = P = Pmax sin o (1-2)
Now consider the machine operating in the motor mode
(note the U, P, and o are now all negative since they were

defined positive for generator action). Since P is max
constant, an increase in mechanical output power can only
be met by an increase in negative o. Note that the motor
load cannot be increased indefinitely. When o =-goo,
P = -P , further loading will pull the motor out of max
synchronism. When the two fields are not revolving at the
same speed the average torque produced is zero, so the
motor will stop. It is clear then that the limit on o for
stable operation is -goo.
Note that these observations are based on steady
state considerations only. For example, if, when operating
at no load, a mechanical load were suddenly demanded of the
motor, the rotor in hunting.for the new equilibrium value
of o, conceivably could overshoot o = -goo and drop out of
synchronism even though the new equilibrium value of
negative o might be less than -90°. This presents a more
difficult problem, called the transient stability problem.
Consider the synchronous machine operating as a
generator. As long as the rotor is moving at or near the
synchronous angular speed w of the system, the mechanical s
shaft torque is simply U/w ~ U/ws. Summing the torques on
the shaft of the machine:
3
(1-3)
where:
I = moment of inertia of generator and turbine
rotor.

u - p
Defining M = w I s
4
then U - P {1-4)
This equation is known as the "swing equation" and is basic
to stability work.
Consider the following problem which will serve to
illustrate most of the important physical concepts necessary
for understanding the work presented in this paper. A
single machine is coupled to an infinite bus through some
transfer reactance x. An infinite bus is, by definition,
a constant voltage and frequency point in the system. See
Figure 1-2.
A fault in the system which is subsequently cleared,
results in changes in the value of x: in fact, x will take
on three distinct values; the pre-fault value, the faulted
value, and the post-fault value, designated respectively as
x 1 , x 2 , and x 3 •
Before the fault occurs, assume the machine in steady-
state operation:
u - p = 0

X
+
e /0° b-
Figure 1-2. Illustrative Example: Single Machine Coupled
Through x to an Infinite Bus
p
u
x-x - 1
I I I I I J I
I I P2(~)
x=x2
Figure 1-3. Graphical Interpretation of the Problem
5

6
0 -1 - (1-5)
Immediately after the fault occurs, P is given by
efeb P = sin o (see Figure 1-3), where usually x 2 > x 1 • 2 x 2
Now U > P2 so the rotor will accelerate, causing the angle o
to increase. The system is now operating on curve P 2 (o).
The velocity term do/dt may be calculated as follows:
or
do = dt
d do 2 at<at> 2 do
dt
= 2do
2 = M (U - P) do
(1-6)
(1-7)
Note that the velocity do/dt is proportional to the
square root of the area Jo
(U - P2 ) do which, when o = o2 ,
01
is the area A1 , indicated in Figure 1-3. The system will
remain on curve 2 until the fault is cleared. Assume this
event occurs when o = o 2 • Because of the machine's inertia,
the angle o will continue to increase, even though the
system is now operating on curve 3, which shows that

P3 > U. This indicates that a torque is developed which
decelerates the rotor. The expression for {do/dt)2 is now:
2 M { (P - P >do m e 2
CP - P >do} e 3 m
7
(1-8)
where the second integral is represented graphically by the
area A2 • It is clear that do/dt will be zero when o = o 3 ,
if A1 = A2 • Then o3 is the upper limit on o, and the
system is stable. This condition is called the "equal-area
stability criterion".
Investigation of Figure 1-3 will reveal some interest-
ing facts. First, there is a limit to how large o2 can be,
if the system is to remain stable. Note that larger values
of o2 make A1 larger. This means that a larger A2 is
required to satisfy A1 = A2 . Therefore, o 3 must increase.
However, o3 can be no greater than om. The critical value
for 02 that will force 03 equal to om will be referred to
as o . The time at which o = o will be referred to as c c T , the critical clearing time. If the fault is cleared at c
t < Tc' the system will remain, stable. The system will
thereafter oscillate back and forth about the new equilib-
riurn point o4 . Damping has been ignored here; however,
damping is always present in actual systems, assuring that
operation will eventually settle down to the new equilibrium

CHAPTER II
REVIEW OF THE LITERATURE
The history of the power system stability problem is
essentially coincident with the historical development of
the electrical power system. It is nothing short of
remarkable to note that electrical power systems have been
in existence less than a hundred years. Thomas A. Edison's
invention of the electric light in October, 1879, gave one
of the first practical applications to what was largely
regarded as a laboratory curiosity. Edison already
envisaged the construction of a generating station with
wires conducting electricity to a remote load before 1879.
On September 4, 1882, his dream became reality when Pearl
Street Station began operating in New York City delivering
a load of 30 kW. This was a direct-current system.
In these early years ac and de systems were used
indiscriminately; in fact, in England in the period 1885 to
1895, such diverse frequencies as 68, 105, and 83 1/3 Hz
were used. For a short time, when street lighting was the
only significant application of electrical power, there was
an animated controversy as to the question of the superior
ity of ac versus de. Two facts tipped the scales in favor
of alternating current, however: (1) increasing loads made
the losses encountered when transmitting electrical energy
8

9
at low voltages intolerable; ac voltage had the advantage
of readily being stepped up or down by means of transformers,
and (2} Tesla's invention of the induction motor in 1887
eliminated the objection that there was no ac device that
could compete with the de motor. Renewed interest in de
transmission is currently being shown, as testified to by
the fact that HVDC (High Voltage Direct Current) Trans-
mission is used to an increasing extent in the newest power
systems, and a substantial research effort is currently
under way in this area.
In the next thirty years, up to 1910, the only concern
with stability involved the construction of transmission
lines and parallel operation of generators. The following
decade, 1910-1920, saw considerable work done in investiga-
ting the variation of synchronous machine reactance under
fault conditions. Symmetrical components, the two-reaction
theory of synchronous generators, and network analyzers
were developed during the next ten years (1920-1930}, while
the state of the art was such that automatic oscillographs
and reclosing circuit breakers were introduced prior to
1940. It was about this time that the first investigations
into the dynamic stability of the synchronous machine were
begun. A good book on the subject was Power System
Stability (in 2 volumes) by Crary [1]* in 1945. It was
here that this investigator first encountered the equal
*Numbers in brackets refer to corresponding entries in the bibliography.

area criterion used by many authors. Crary credits an
earlier article (1929) by R. H. Park and E. H. Bancker
entitled "System Stability as a Design Problem" with the
original work. Crary discussed such topics as multi
machine steady state stability, long distance power trans
mission, alternator saliency, and the per unit system.
10
A later work was Edward W. Kimbark's Power System
Stability in three volumes [2], [3], and [4]. This work
covers much the same areas as does Crary's, but goes into
considerably more detail on most topics and devotes
substantial discussion to colateral topics such as exciter
response. For example, Kimbark points out that speed of
exciter response definitely affects stability; the faster
response times improving the stability limit, and gives
typical numerical values in the range 100 to 500 volts per
second for a 125 volt exciter. Volume I defines the
stability problem, presents the swing equation and discusses
its solution. The two-machine problem is subjected to an
exhaustive investigation. Faulted networks are analyzed,
and the G.E. and Westinghouse ac calculating boards are
discussed in some detail.
Volume II explains the operation of auxiliary equip
ment important to the stability of power systems; for
example, clearing time, relay time, and interrupting time
for circuit breakers and relays are defined. A wealth of
interesting and valuable information is given on circuit

breakers. Protective relaying is also discussed, including
directional, ground-fault, and distance relaying. The
prevention of breaker tripping during machine swings and
reclosing sequences are other topics considered, which have
direct bearing on the stability problem. Selectivity
co-ordination of protective devices is also studied.
Kimbark's Volume III is concerned with studying
synchronous machine theory in considerable detail in order
to understand the machine's transient performance. Another
text that covers some of the same material and is also
recommended to the reader is Electric Machinery by
Fitzgerald and Kingsley [5]. Of course, scores of books
are available which discuss the synchronous machine. These
are two which the author found helpful and are recommended
to the interested reader. Since Kirnbark's work, there
11
have been many good texts published that cover the same
major topics, although in somewhat lesser detail. Steven
son's book, Power System Analysis, published in 1962, is an
outstanding example [6]. Covering the basics of power
systems, this work explains the R, L, C constants of the
transmission line; skin effect; the per unit system; power
circuit diagrams; symmetrical and unsymmetrical faults;
symmetrical components; transient, sub-transient, and steady
state synchronous impedance; and transient stability. It is
highly recommended by this writer for those who seek a
concise, lucid presentation of background information
necessary for work in this field.

A more modern treatment of power system stability is
found in a book entitled Computer Methods in Power System
Analysis by Glenn W. Stagg and Ahmed H. El-Abiad, 1968 [7].
This text begins with an introduction to matrix algebra, a
proficiency with which is essential to the understanding of
the rest of the book. Network graphs and network topology
are then discussed in some detail. The theory is then
tailored to three-phase power systems. Short circuit
12
studies are made and the details of load flow studies are
explained. More mathematical theory is then presented,
chiefly numerical analysis, discussing numerical solutions
of simultaneous algebraic equations and of differential
equations. Finally, a substantial chapter on transient
stability studies is included. The book's emphasis is an
application of computer techniques to power-system problems,
with some particular attention given to transient stability.
The foregoing discussion was a brief resume of the
more useful books used by the author for background
material and reference work necessary to produce this
dissertation. They are enthusiastically recommended to the
interested reader for similar purposes. Several interesting
articles on transient stability in power systems are to be
found in the literature. The best source of this material
is the I.E.E.E. Transactions on Power Apparatus and Systems.
Discussion of the most important of these papers follows.
An article entitled "A New Approach to the Transient
Stability Problem" by N. Dharma Rao [8] starts by making

what are essentially the standard assumptions (these
assumptions are discussed in detail in Chapter III of this
work) and limits itself to discussing a single machine
coupled to an infinite bus. The major contribution
of the paper is that a modified method of Lalesco is
used to solve the swing equation as opposed to the normal
point-by-point method. Rao also points out that, consider-
ing his approximations, the system is conservative and
that the kinetic energy {T) is proportional to {do/dt) 2
and the potential energy {V) is proportional to f P (o)do, a
where P {o) is the accelerating power. The paper presents a
13
the equal-area criteria and also uses phase-plane techniques
to solve the problem. Rae's work notes that the maximum
and minimum potential energy values can be found from
dV/do = o, (P = 0), and the critical clearing angle can a
be found when the total system energy E = V (o). max
In another paper {9], Rao discusses extending
conventional phase-plane techniques to solve the multi-
machine transient stability problem. A separate phase
plane is constructed for each machine. As Rao points out,
it is interesting to note that the amount of computational
work necessary for a three machine problem is more than
double that required for a two machine problem. The method
appears to be unwieldy for larger systems. Again, the
significance of the system energy is underlined, since
Rao is able to identify the saddle points on the phase
plane with maximum potential energy points. He notes that

the total system energy, i.e., potential plus kinetic,
must never exceed the maximum value if the system is to
remain stable. Rao chooses to neglect system resistances
for the sake of elegance.
J. E. Van Ness [10], in his paper "Root Loci of
Load Frequency Control Systems," discusses the load
frequency control system of a generator and determines
its response by an investigation of the roots of the
characteristic equation of the system. While this article
was not directly involved with the subject of this paper,
it is helpful because it gives valuable background material
on the speed control of prime movers.
"Improved Stability Calculations," by M. A. Laughton
and M. w. Humphrey Davies [11], is really a discussion of
the way a power system is usually ~odelled when a stability
study is to be performed. A rather detailed discussion of
damping power is included. Exciter and governor systems
are explained in some detail. The passive part of the
system is discussed in matrix form. The only actual
application considered is a single machine subjected to a
phase fault at its terminals. Predicted performance is
compared against act~al test results for this case.
G. E. Gless [12], in his article entitled "Direct
Method of Liapunov Applied to Transient Power System
Stability," comments that methods such as the equal-area
criteria and the phase-plane approach are numerically too
complex for systems larger than two machines. His approach
14

15
is to determine stability from the properties of a single
function, that is, a Liapunov function, V, has the follow-
ing three definitive properties: (1) the function is
positive definite, (V > 0). (2) V is a function of time
and of the state variables of the system, (V = V(X,t)).
(3) dV/dt < 0. The Liapunov stability theorem used by
Gless may be summarized as follows.
Given X= F(X,t), where X = [x1 , x 2 ,
F = [f1 , f 2 , •••, fn]T constitute the equations of motion
of the system. The equilibrium state is stable if there
exists a function V(X,t) such that V(X,t) ~ 0 (see page 167,
Gless [12]).
As Gless points out, the difficulty with this
approach is the construction of an appropriate Liapunov
function. There is no general method known for the construe-
tion of such functions. Gless recognizes that this V
function should be related to the total system energy.
(Recall that Rao in an earlier work demonstrated that
system stability could be determined from a total energy
function.) He then investigates the two and three machine
problems. Gless's Liapunov function for the general three
machine problem as given in Equation (37} on page 165 of
his paper is:

+ r-x2
Kl sin (x I + x2 I + a 1 - a 2 )d(x1 1 - X I) 1 2 0
+ r-x3
K2 sin (x2 I - X I + a 2 - a 3 )d(x2 • - X I) 3 3
0
+ r3-xl K3 sin (x3' - xl' + a3- al)d(x3' - xl')
0
16
(2-1)
where = X I = 1
01 = power angle of machine 1 with respect
synchronous revolving reference
al = stable equilibrium value of 01
do 1 dx1 wl = dt = dt
P1 = mechanical input power to machine 1
(constant)
to a
It should be pointed out that the problem of directly
solving for the x's (or 0 1 S) has only been partially
eliminated. To determine the value of V at any particular
value oft, all the 0 1 S must be known at that same t. The
maximum value allowed for V for stable operation is

17
determined from the nearest unstable equilibrium state.
It is therefore evident that the V function may be used as
a sort of index of stability, the larger values corres-
pending to less stable situations. Gless did not attempt
to correlate the stability boundary with clearing times.
An article that is quite similar to the one by Gless
is entitled, "Transient Stability Regions of Multi-Machine
Power Systems" by Ahmed H. El-Abiad and K. Nagappan [13].
The principle difference is that this paper consistently
deals with the n-machine problem throughout, and gives a
four-machine numerical example. El-Abiad also makes use
of a Liapunov function, given in Equation (5), page 172 of
the paper:
••• 0 w ••• w ) = ' n' 1 n
(2-2)
The problem of determining the unstable equilibrium state
is carefully considered; there are many unstable states
and to locate the one toward which the system is moving
takes some thought. El-Abiad, designating the largest
machine as reference, then solves for the initial unstable

state of the ith machine by ignoring all power terms
involving the o's except the one involving oi and oref·
Since sine and cosine functions are involved, this results
in two values for oi' one such that loil < w/2, and one
such that w/2 < jo. I < TI. For the smallest machine the l.
larger value of o. is selected, and the smaller o. value l. l.
is used for all the rest. El-Abiad then asserts that,
having selected starting values in the manner described,
the method of steepest decent is used to converge to the
unstable equilibrium, the unstable state thus computed will
be the first encountered by the physical system. This
method is also used by Kimbark.
A paper entitled, "Nonlinear Power System Stability
18
Study by Liapunov Function and Zubov's Method" by Yao-Nan Yu
and Khien Vongsuriya [14] considers the problem of
constructing a suitable Liapunov function by Zubov's Method.
This approach involves arranging V in the form of an
infinite series which must be truncated if useful numerical
results are to be obtained. Unfortunately, the point at
which the function should be truncated is determined
largely by experience. One example problem was worked
a single machine coupled to an infinite bus. In this
example, good correlation to the true stability limit was
obtained with a V function of order 16. As a demonstration
of the increasing complexity of the method, Dr. J. M.
Undrill, in his comments at the end of the article {page
]485), noted that for a system with only two state

variables, a matrix equation of order 15 was necessary to
generate a V function of order 14. For the same order V
in a 3 variable system, the necessary matrix size increased
to 120, and for an 8 variable system a matrix size of
116,280 is encountered.
A recent paper, published in March, 1968, is
"Dynamic Stability Calculations for an Arbitrary Number of
Interconnected Synchronous Machines" by J. M. Undrill [15]
takes a different approach to the problem. By limiting
19
its approach to a small signal analysis, the paper is able
to use the elegant methods of modern control theory; namely,
to write the system equations in the form:
[}{] = [A] [X]
Then the locus of the eigenvalues of the system are
calculated by computer. The criterion for stability is
that the complex eigenvalues maintain negative real parts.
By defining a sufficiently general [X] vector, governor
and exciter action may also be included. Component vectors
of [X] include the d and q field, armature, and amortis
seur winding flux linkages, speed deviations, excitation
voltages, and the power angles. It should be said that,
while Undrill's paper modifies some of the standard
assumptions, it does not completely eliminate them. In
particular, the transmission lines, transformers and loads
are still modelled as constant resistances and reactances.
Also, the basic complexities of the problem still persist;

20
for example, for a simple two machine problem the [A] matrix
is 16 x 16.
This discussion would be incomplete if mention was
not made of the references used to explain the requisite
background mathematical theory. Material concerning
Liapunov's stability work was taken from La Salle and
Lefschetz [16], and to a lesser extent from Hahn [17] and
from Zubov [18]. For the work done in numerical analysis,
Monroe [19] and Jennings [20] were consulted. Topics in
power system research were discussed in Sporn's brief
book [21].

CHAPTER III
DISCUSSION OF ASSUMPTIONS AND APPROXIMATIONS
Several approximations are necessary in order that
an actual power system may be modelled in a way such that
its performance is mathematically tractable. Most of the
assumptions involve the generators of the system. Also,
alternative models of transmission equipment, electrical
loads, and interconnecting transmission lines should be
examined.
Modeling the Machines
The generators in the power systems are to be treated
as three-phase alternators. In the steady state, the
rotor, which holds de windings designed to create alternate
north and south poles, emanates a constant magnetic field
and revolves at a constant speed. This field sweeps across
the stator conductors; and, by Faraday's Law, generates
voltages in the stator coils which are proportional to the
product of the strength of the field and the rotor speed.
21
It is assumed that these voltages are sinusoidal with time.
Note that the frequency of the generated voltage is directly
related to the rotor speed. In fact, if the rotor has only
two poles, the angular frequencies of the stator voltage
and of the rotor rotation are identical.

22
This close relationship between stator frequency and
rotor velocity inspires the definition of the "electrical"
unit of angular measure:
e in electrical radians
No. of Poles e = 2 x in mechanical (physical)
radians. (3-1)
The advantage to measuring angles, speeds, and accelerations
in electrical radians (elec. rad/s, etc.) is that the
relations are independent of the number of poles. For·
example, a 2-pole 3600 r/min machine and a 4-pole 1800 r/min
machine both generate 60 Hertz voltages and have identical
synchronous speeds of 377 electrical rad/s. This situation
requires that some familiar constants (for example, moment
of inertia) must be modified to take the number of poles
into account.
The per-phase equivalent circuit of the alternator is
shown in Figure 3-1. At steady state operation, e and T . g a
are both sinusiodal and their
frequencies are identical to
the speed of the rotor in
electrical radians per second.
The synchronous inductance L . s
associated with the synchronous Figure 3-1. Per-Phase
reactance x (x = w L ) is a s s s s Equivalent Circuit of
composite inductance due to an Alternator
the self flux linkages of the phase current ia and the

mutual flux linkages produced by the currents flowing in
the other two phases. Because these flux paths are
primarily in iron two points should be noted:
(1) xs is large, typical values being around
1.0 per unit.
(2) x is not strictly constant, its value s
depending on the degree to which the iron
is saturated.
Also note that the effect of the three phase currents,
acting in concert, is to create a revolving magnetic field
of constant magnitude and revolving at speed w . Since s -
under steady-state conditions the rotor speed is also w , s
there is no relative motion between the stator field and
the rotor, and consequently no voltages are induced by
inductive coupling. There is, however, a fixed angle
between the stator and rotor fields which is dependent upon
the external circuit.
When any change in external circuit occurs, the
angle between the two fields will adjust itself to a new
equilibrium value. During this adjustment period there is
relative motion between the revolving stator field and the
rotor. As a result, coupling with the rotor field circuit
and any other rotor circuits must be accounted for. This
is usually done by modifying the value of the synchronous
reactance. Consider a ~phase alternator at no load to
23
whose terminals is suddenly applied a 3-phase short circuit.
In general, there will be a de component in each phase

current. With this de component eliminated, typically the
short circuit current appears as shown in Figure 3-2.
I"
I I
I
\ ' -~'h--._
/1 -r:;-- -I l {'\. ,, ,,
-
~~'~~\~\~t~~~~l~~)-~-..Y--
-~ ~;-.,.,-'-+-----...,.-----~ -f.- ...,.J . / _ trans1.ent steady state - ) 11 subtransient
t
Figure 3-2. Transient Phase Current of a Shorted Generator
Define
Then
with de Component Removed
Eg = Maximum Value of Phase Voltage at No Load
E x 5 = ~ = synchronous reactance
E x' = _9_ = transient synchronous reactance s I'
E x" = -# = subtransient synchronous reactance s
24

Clearly: x > x' > x" s s s
In other words, the decaying current envelope is explained
by allowing the synchronous reactance to increase.
Physically, x' is associated with the stator flux s
linkages defining x and in addition the coupling with s
the rotor field circuit, which, by Lenz's law, in effect
subtracts flux linkages. The subtransient reactance, x" , s
includes all of the flux linkages of x' and in addition s
the negative linkages of the damping windings. Because the
damper windings have a small time constant, influence is
felt only a short time (usually 3 or 4 cycles). The time
constant of the field circuit is larger, extending the
so-called transient interval over 30 or 40 cycles.
Several approximations are evident in this approach,
namely:
(1) If the variation ~n reactance is to account
for the decaying current, the variation
should be continuous.
(2) Dividing the response into three distinct
regions is reasonable but arbitrary.
(3) x , x' , and x" are treated as constants, s s s
ignoring saturation effects.
Taking note of these considerations, it was decided
to model the machine with an equivalent circuit as shown in
Figure 4. The value of x was chosen to be the transient g
synchronous reactance x's' since the inertia of a typical
25

26
machine is such that its period of oscillation is compatible
with the transient interval. The correct value of E is g
that, which acting behind x's and ra' will reproduce the
initial network conditions around the system. It is called,
logically, the "voltage behind transient impedance". This
voltage is taken as being constant throughout the transient
interval. Voltage regulator operation is not considered
in this paper.
Some of the losses of the alternator are ignored.
Practical values for the efficiency of machines of the size
used in a typical power system are above 96 per cent. This
means that the total losses comprise no more than 4 per
cent of the total power involved. Furthermore, since stator
copper losses will not be ignored, only about one-third of
this loss is actually neglected, or about one per cent. The
losses ignored are ventilation losses, plus rotational
losses, which include friction (bearing friction, brush
friction sliding on slip rings, etc.), windage (wind resis-
tance to the revolving rotor) , and the magnetic hysteresis
and eddy current losses.
Also ignored in this paper is the effect of the
saliency of the rotor poles. With salient poles (i.e., the
rotor in cross section is not circular) , another component
of synchronous torque is present, called the reluctance
torque. It exists due to the fact that a magnetic circuit
will tend to arrange itself into a geometry of minimum
reluctance. This same phenomenon explains why a magnet

attracts its keeper so strongly. Both of these observa-
tions are examples of the more general principle that a
system tends to move toward a state of minimum energy.
The effects of this torque may be approximated by consid-
ering two components of x' , one on the direct axis (i.e., s
the axis of minimum reluctance) and one on the quadrature
axis (i.e., the axis of maximum reluctance). This
procedure will effectively double the number of variables
with which one must deal, since the currents must also be
divided into their direct and quadrature-axis components
in order to compute correctly the internal voltage drops.
Generally, high-speed generators which are driven by
steam turbines have cylindrical (non-salient pole) rotors,
while the slower, hydro-turbine driven machines have
salient pole rotors. Machines with salient poles tend to
be stiffer, i.e., more stable, harder to pull out of
synchronism. Therefore, saliency was neglecte~ for the
following reasons:
(1) Since saliency tends to make a machine more
stable, the approximation is a conservative
one.
(2) Most practical systems have a great majority
of cylindrical rotor machines.
(3) Consideration of saliency essentially
doubles the complexity of the equations.
27

Choice of Phase Reference
The phases of all voltages and currents and the
angular positions of all machine rotors must be measured
from a common reference. If an infinite bus were assumed
it would be logical to take that bus phasor voltage,
rotating at a fixed angular speed w , as reference, s because for a stable system the rotor speeds of all
machines would eventually approach equilibrium at ws.
Even in a stable system with the initial speeds of all
machines w , a disturbance would cause the system to settle s
down to a new synchronous speed (ignoring speed control
of the prime movers), if an infinite bus is not assumed.
It is this latter situation that is considered initially
in this paper.
With no infinite bus, one of the machines may be
chosen arbitrarily* as the reference. This results in
the following definition:
o. =the angle measured from the rotor of the ~
reference machine to the rotor of the "ith"
28
machine, considered positive in the direction
of rotation and measured in electrical
radians. Equivalently, oi is the phase
angle by which the voltage behind transient
reactance of the ith machine leads the
*Logically the largest machine should be chosen. Note that in Chapter VI Machine #1 is always the reference.

29
voltage behind transient reactance of the
reference machine.
i = 1, 2, •••, n,
where n is the number of machines in the
system.
Also define:
do. ]_
i 1, 2, a.. = dt = • • • n (3-2) ]_ ' By definition:
0 = 0 and a. = 0 r r
(interpret the subscript "r" as "reference".)
The speed of the ith machine is:
w. ]_
i = 1, 2, • • • , n
Speed Control of the Reference Machine
In an actual power system, the prime mover of each
generator is equipped with a means of automatic. speed
(3-3}
control. Work in power system stability usually neglects
any speed control action. This paper investigates system
behavior with and without a speed control loop placed on
the reference machine. The type of speed control system
used in practice varies considerably. For the investiga-
tive purposes of this paper, a proportional plus integral
type of control system was decided upon. This system was
chosen since it incorporates the advantages of each,
namely, the stability of proportional control and the zero
steady state error feature of integral control. The idea

of proportional plus integral control is apparent in
Equation (3-4). ·
Where:
t
Ur(t) = Ur(O) + K1 J we dt + K2we
0
w = the speed error e
= ws - wr
Kl and K2 are constants
t > 0
The system block diagram is shown in Figure 3-3.
Pr = electrical demanded of machine.
u 1 Kl
r + K2 M s - + r s
Figure 3-3. Speed Control Block Diagram
Now
30
(3-4)
power ref.
oor

31
t t -1 I (U - P )dt 1 I (P - U ) dt we = M = r r Mr r r r
0 0
dw 1 or e (P - U ) dt = M r r r
Now
Using finite differences:
flU r (3-5)
Modelling Transmission Equipment
Computer studies show that, for a system with reason-
able values for all components and speed control ·on the
reference machines, wr stays reasonably close to ws during
the transient interval. For all systems tested in
Chapter VI, the largest value w reached during the r
transient interval was no greater than 390 electrical
radians per second with ws = 377 electrical radians per
second. In view of this result, it seemed reasonable to
model all loads, transmission lines, and transformers in
terms of their equivalent circuits; treating the elements
of these circuits as constant impedances presented to
sinusoidal currents and voltages at the frequency ws. This
is a major assumption, as it dictates the basic approach
to the problem. Other avenues of investigation were

attempted but proved unprofitable, and in the final
analysis, unnecessary, by all workers in the field, as
far as the author could discover.
The Inertia Constant
The rotational Kinetic Energy of the ith machine
rotor is:
where w. = rotor speed in radians per second l.
I. = mass moment of inertia of machine and l.
turbine rotors.
If it is assumed that the rotor speed does not change
appreciably from synchronous speed, the quantity Mi' =
will be approximately equal to Iiwi.
where
Also
Where
1 e: ~-2 M.'w. K. l. l. l.
M. I = I. w l. l. s
G. l.
H. l.
= G.H. l. l.
= MVA Rating of Machine
Stored rotational energy in megajoules = MVA Rat1.ng of Mach1.ne
Equating (3-7) and (3-8),
G. H. l. l.
1 = -2 M. 'w. l. l.
32
(3-6)
I.w l. s
(3-7)
( 3-8)

or
M. I = ~
2G.H. ~ 1
w. 1
Acceleration Mechanical Power developed in megawatts =
where Ta is the torque producing the acceleration.
Converting to per unit:
P = accelerating power in per unit a. ~
p I M. I a.. p a i 1 ~ = = a. 5base s
1 base
or defining
where
M. 1
M. 1
=
p a
M. I
~
5base
= M.a.. 1 ~
Now consider a range on G./Sb to be: 1 ase
G. 0.1 < ~
5base < 1.0
A practical range on Hi is:
1.0 < H. < 10.0 - 1 -
33
{3-9)
p I a •
( 3-10)
(3-11)
{3-12)
If the system frequency is 60 hertz, ws = 377 radians per
second. Therefore applying Equation (3-12)

0.0053 < M. < 0.053 - l -
The larger M. values correspond to the larger machines. l
34

CHAPTER IV
STATEMENT OF THE PROBLEM
It is now appropriate to state the problem precisely.
The power systems considered in this paper are balanced
three phase systems. The term "fault" is understood to
mean reducing all three line voltages instantaneously and
simultaneously to zero at a known point along one of the
transmission lines, which interconnect the system loads
and genera tors!· I' R~moval or clearing of the fault is
accomplished by opening the faulted line at both ends. The
fault is defined to occur at t = 0, and is cleared at
t = T. The problem is to find the maximum value of T such
that the system will remain stable. This value is referred
to as the critical clearing time, and is denoted as T . c
The term stability is defined in "American Standard
Definitions of Electrical Terms" as follows:
"Stability, when used with reference to a power
system, is that attribute of the system, or part of
the system, which enables it to develop restoring
forces between the elements thereof, equal to or
greater than the disturbing forces so as to restore
a state of equilibrium between the elements."*
*See Stevenson [6], page 332.
35

Roughly interpreted this means that although the system
generator rotors are not moving at the same speeds during
the interval 0 < t < T, and for some finite interval
t > T, the system will eventually settle to stable equilib-
rium condition such that all the machines are again
synchronized (i.e., the rotors all have the same speed).
The dynamic equations of the system are second order,
non-linear differential equations. A simultaneous solution
of these equations by numerical techniques is possible.
The difficulty with this approach, however, is that the
process of determining the critical clearing time reduces
to one of trial and error. A value for T is hypothesized,
and a calculation by computer is made, and stability is
determined by examination of the trajectories of o .. Note ~
that computation well past the point t = T is necessary to
determine stability. It is clear then that application of
this direct approach to on-line computer control of power
systems is impossible. An indirect approximate method for
determining the critical clearing time is presented in
this paper.
An outline of the solution is as follows:
(1) Construction of the System Model
(a) the Pre-Fault System
(b) the Faulted System
(c) the Post Fault System
(2) Initialization of the System Parameters
(Pre-Fault Values)
36

(3) The Derivation of electrical power flow
equations
(4) Derivation of the equation of motion
(5) Determination of Stable and Unstable
equilibrium states
(6) Construction of the Stability functions.
37

38
CHAPTER V
PRESENTATION OF THE SOLUTION
The Y Matrix
The n-generator power system may be represented as an
electrical n-port network. Define the ports to be at the
terminals of the ideal voltage generators, which are
internal to the machines of the system.
u n
...
....
• . . ' •
re •
•
System
Network
Figure 5-l. The General Power System

39
where:
e. = ac phasor l.
voltage behind transient synchronous
impedance for the ith machine per phase.
= e./fJ. l.-l.
z. = complex l.
transient synchrc;>nous impedance per
phase of the ith machine.
u. = l. mechanical input turbine power to the ith
machine.
i. = ac phasor current per phase. ~
Note that since the generator sources are all at the
ports, the system network is passive. Writing the node
voltage equations for the system in node voltage form:
....... - I - I - I - I - I
l.l yll yl2 • • • Yln Yl,n+l • Yl,n+m el
....... - I - I - I
1.2 y21 y22 • • • Y2n e2
• • • • • • • • • • • • • • • •
- I -....... I I • • Yn,n+m I e l. Ynl • • • Ynn Yn,n+l •
n _L n = - - - - - - - - - - - - - -
- ' ... - I - I • • • I 0 Yn+l,l Yn+l,n Yn+l,n+l Yn+l,n+m e n+l
0 e n+2
• • • • • • • • • • • • • • • •
- - I - I • • • I
0 Yn+m,l •••• Yn+m,n Yn+m,n+l Yn+m,n+m e n+m
(5-1)

40
where nodes i through n are the ports and nodes n+l through
n+m are all other (internal) nodes, and where
Y ' = Sum of all admittances ii
connected to the ith
node.
y .. ' =Total admittance between 1]
nodes i and j.
Partitioning Equation (5-l):
= 0
where
....... el e 11 n+l
....... e2 en+2 12
IA = EA = EB = • • •
• • • • •
...... en en+m 1 n
and
YAA is n X n
YAB is n X m
YBA is m X n
YBB is m X m
i=l ••• n+m
i=l ••• n+m
j=l ••• n+m
(5-2)

41
From Equation (5-2):
IA = YAAEA + YABEB
0 = YBAEA + YBBEB
EB = -1 -YBB YBAEA
and
IA = -1 YAAEA - YABYBB YBAEA
(Y - -1 = YABYBB YBA)EA AA
Let
IA = YEA (5-3)
where
y = y -1 AA - YABYBB YBA (5-4)
The Y matrix will be used to specify the network and
will be symbolized as:
yll yl2 • • • Yln
y21 • ••• Y2n y = (5-5)
• • ••• • • • • •• • • • • • • •
Ynl • ••• Ynn
Now understanding a "fault" to mean that one of the
system nodes is connected directly through a zero impedance
to the reference node, it is noted that this change in the
system network produces a corresponding change in the
matrix Y. Furthermore when the fault is cleared (i.e., the

42
faulted line removed from the system), again the matrix Y
is re-evaluated. In other words, the stability problem
involves three distinct Y matrices, namely:
(1} the pre-fault Y matrix,
(2} the faulted Y matrix,
(3} the post-fault Y matrix.
See Appendix A for evaluation of these three Y matrices.
No attempt has been made to distinguish these matrices
with a special notation. The reader will be able to
discern which matrix is involved from context. When there
is the possibility of confusion, the proper matrix will
be identified.
The Electrical Power Flow Equation
The real power flowing into the ith port of the
system network is:
Pe . = Re [ e . T. * ] ~ ~ ~
(5-6}
But from Equation (5-3) :
ii = Yilel + Yi2e2 + ••• + Yinen i = 1, 2, ···, n (5-7)
Pei = Re [ei(yilel + yi2e2 + ••• + Yinen}*]
Defining y .. = y .. /<Pij ~] ~]
(5-8)
Pei = Re [eielyil /oi - (ol + <Pil) + eie2yi2 joi - (62 + <Pi2)
+ • • • + e. e y. ;a . - ( o + <P • ) ] ~ n ~n ~ n ~n
(5-9)

or p . = e~
43
(5-10)
The Equations of Motion
The differential equation of motion of the ith machine --
may be written as follows:
where
T . - T . m~ e~
i = 1, 2, • • • ' n (5-11)
T = Mechanical input torque m. ~
p e.
T ~ the electromagnetic counter torque = = e. w.
~ ~
I. =Moment of Intertia of the ith machine and ~
its direct coupled prime mover
w. = angular speed of the ith machine ~
a.. ~
do. ~
= wr + dt =
do. ~ ~
dt
w r + a.. ~
(5-12)
Substituting (5-12) into (5-11) and approximating wi with
ws (see Chapter III):
where
u. - p ~. e.
~
i = 1, 2,
M. = w I. = Inertia Constant .1. s .1.
• • • , n (5-13)

44
u. = T w. = Mechanical Input Power. ~ m. ~
~
Let the subscript "r" designate the machine chosen as the
reference. applying the equation to the reference machine
(i = r):
or dw U - P
r r r =
dt Mr
(a r
= ar = 0 by definition)
( 5-14)
Substituting this expression for dwr/dt into (5-13)
and rearranging:
da. u. - p ur - p ~ 1 ei er i 1, 2, . . .
dt = = n M. M
, ~ r
(5-15)
do. ~
dt = a. l.
(5-16)
Observe that the above equations constitute (n-1)
pairs of independent equations in (n-1) pairs of unknowns
Rewriting:
where
da. ~
dt
deS. ~
dt
fi(ol,
= a. ~
cS2' ... , a.) =
~
···,a); (o =a =0). n n r
(5-17)
i = 1, 2, • • • ' n
i "I r (5-16)
u. - p u - Per ~ ei r (5-18} M. M ~ r

or, from Equation (5-10),
e. l. - [M. l.
u. l.
M. l.
u r
M r
45
er n M- L ekyl..k cos(or- (ok + ¢rk))]
r k=l (5-19)
Note that Equation (5-19) holds throughout the pre
fault, faulted and post-fault intervals if the appropriate
Yij values are inserted for each condition. The pre-fault
values of y .. are used along with the e. values and initial l.J l.
conditions on all the o's (designated as 0. 0 ) to determine l.
the mechanical input powers for each machine. These
values (the U. 's) are thereafter assumed to hold constant l.
throughout the transient interval with one exception: when
the speed of the reference machine is controlled, the
mechanical input power U is adjusted by means of the speed r
control loop as it acts to restore the speed of the
reference machine to w • s
It is possible to solve these equations by numerical
methods, using a digital computer. This was done employing
a Runge-Kutta Method which is presented in Appendix c.
This direct approach, while used in the paper to provide
a check on the system stability, cannot be used to deter
mine the critical clearing time without essentially
reducing the problem to trial and error. Instead, an

indirect approach based on the derivation of a set of
stability functions will be presented.
The Post-Fault System Equilibria
One condition for post-fault stability is that there
exists at least one stable post-fault equilibrium state.
Equilibrium states are defined as values of o for which
and
a. ~
da. ~ = = dt
i = 1, 2, • • • ' n
Such values may be obtained by forcing the above conditions
in Equation (5-13) , obtaining
P. = U. ~ ~
i = 1, 2, • • • , n
i ~ r
46
w = w r s (5-20)
There are two possible types of equilibrium states:
stable and unstable. To demonstrate this, consider again
the single generator coupled to an infinite bus (see
page 4). Note the equilibrium states indicated in
Figure S-2. There are two possible values of o for which
p s u = U: o and o • Suppose a small mechanical disturbance
momentarily increased U to U + ~U, making the rotor move
slightly faster than the revolving field, and therefore
forcing o to increase. If the machine was operating at

s o = o now P > U, and torque
is developed to decelerate
the rotor and restore o to os.
However, if operation was at
o = ou, then P < U and the
rotor continues to accelerate.
It is then clear that sustained
operation at o = ou is
impossible. Other stable
values for o may be obtained
u p
Figure 5-2. The
Two Equilibria
os and ou
by adding multiples of 2n to os but these are identical
physically and should not be considered as different
solutions. Thus in this problem there exists one stable
state o = os and one unstable state o = ou.
47
When the power system contains more than two machines,
a set of (n-1) equations of the form of Equation (5-20)
must be solved in terms of o2 , o3 , •••, on, or (n-1)
unknowns. Since trigonometric functions are involved,
several solutions are possible. These solutions are the
equilibrium states of the system. The equilibrium is
stable if af.jao. < 0, fori= 2, 3, ••• , n (f. is defined ~ ~ ~
in Equation (5-18)). Otherwise, the equilibrium is
unstable. Equation (5-20) is solved using the Newton-I
Raphson technique, detailed in Appendix B. The values of
o. to which the method converges depend on the starting ~
values used. It was found that using the initial pre-fault
machine values, oi 0 ' consistently resulted in rapid

convergence to the stable equilibrium values, o. 5 • For l
each machine, the unstable state at which the stability
function is to be evaluated is the one nearest to the
pre-fault stable equilibrium state.
In his paper, El Abiad [13] outlines a technique
for computing starting values so that his method of
Steepest Descent would converge to this desired unstable
equilibrium state. The author obtained satisfactory
results by obtaining starting values from the following
equations:
o. o. s for 0 . s 0 = ~ - > l l l
or o. o. s for o. s < 0 = -~ -l l l
The Development of the Stability Function
It would be desirable to predict the value of {a.) 2 l
at the maximum swing point for a prescribed clearing time
T. A positive value would indicate the rotor still in
motion at its nearest unstable equilibrium and therefore
that the machine had lost synchronism; a negative value
indicating an imaginary a. meaning that the rotor would l
never reach this point and a zero value indicative that the
boundary between stable and unstable operation was reached
(i.e., the value ofT used was Tc' the critical clearing
time) •
Rewriting Equation (5-16):
48

49
da. l. f • ( 0, I 021 0 n) dt = • • •
l. l. I
Noting that
da. d 2 d(a.) 2 dt a.
l. l. l. dt = = 2a. 2do. (5-21)
since
then
and
l.
a. = do. /dt l. l.
d(a.) 2 = 2fi(o 1 1 l.
2 (a. ) l.
l.
021 ... 0 )do. , n l.
(5-22)
The limits on Equation (5-22) require some comment.
2 The value computed for (ai) will be that at the upper
limit. At the lower limit ai = 0 because just prior to the
disturbance all machine rotors are synchronized and since
all the rotors have some inertia their speeds cannot change
instantaneously. . . . o ) is a discontinuous n
function: for t < T, the y .. and ¢ .. values to be used in l.] l.J
calculating P. must be the faulted values, while for t > T l.
the post-fault values should be used. Therefore, consider
the following function:

50
f. (faulted values)do. 1 1
+ 2 f. (post-fault values)do. 1 1
(5-23)
The first integral is 2 simply (a.) where this function 1
is the value of do. 2
(dt1 (t)) that corresponds to the instan-
taneous value of o . ( t) •
where
and
1
Rewriting:
s • I 1
P. = 1
p = r
2 =(a.) + 2
1 . . . o }do. n 1
= !_ (U. - P.} - Ml (U - P} M. 1 1 r r
n I
j=l
n
I j=l
1 r
e . e . y . . cos ( 8 . - o . - <P • • ) 1 J 1] 1 J 1)
e e.y . cos(o. + <P .) r J rJ J rJ
(5-24)
andy .. and ¢ .. are post-fault values. Some of the terms 1] 1)
of f. are easily integrated. Performing these integrations: 1
s 1 = (a. ) 2 + ~ (U . - e. 2y. . cos ( <P • • } ) ( 8. u - 8. ) i 1 M. 1 1 11 11 1 1
1

2 <u -r
n I e e . y . cos ( o . + ¢ . ) ) ( o . u - o . )
j=l r J rJ J rJ ~ ~
j~i
+ 2 e e.y. [sin(o.u + cf>r;)- sin(o. + 4> .)] Mr r ~ r~ ~ • ~ r~
51
2 M. ~
e . e . y . . cos ( o . - o . - ¢ . . ) do . ~ J ~J ~ J ~J ~
(5-25)
Here U is treated as constant which is not the case if r
speed control of the reference machine is employed. As an
approximation, evaluate the integral in Equation (5-25) by
holding o. constant and performing the integration on the J
single variable o .• Name the function the stability ~
function for the ith machine {S.), where: ~
S. = {ex. ) 2 + ~ {U • - e. 2y. . cos ( ¢ .. ) ) ( o . u - o . ) ~ ~ M . ~ ~ ~~ ~~ ~ ~
~
n (U - I
j=l
u e e.y . cos(o. + ¢ .)) (o. r J r) J rJ ~
- 0.) ~ r
j~i
+ ~ e e.y. [sin{8.u + ¢ .) - sin{8. + cf>r;)] Mr r ~ r~ ~ r~ ~ •
2 - M-:-
~
n I
j=l j~i
u e . e . y. . [sin ( o . - 8 . - ¢ .. ) ~ J ~) ~ J ~J
- sin ( 8. - o . - ¢ .. ) ] ~ J ~J
{5-26)
There is a s. function for each machine in the system. ~
Careful inspection of Equation {5-26) will reveal that
s 1 : 0, and therefore gives no stability information. The

other stability functions start out negative. If the
fault is cleared while all the S. are negative (discarding 1
s 1), the system should be stable. If the fault is
cleared after any one (or more) of the S. become positive, 1
it is anticipated that the system is unstable. The
critical clearing time T is the time at which the first c
S. function reaches zero. 1
52

CHAPTER VI
APPLICATION OF THE METHOD
In presenting how the method may be applied to an
actual power system, some introductory comments are
appropriate. The diagram shown in Figure 6-1 is an
example of a "single line" diagram for a simple power
system. For those unfamiliar with the single line diagram,
the equivalent per-phase circuit is given in Figure 6-2.
53
In these figures, the complex numbers represent admittances.
All three lines of a three phase system are represented by
a single line. Since balanced conditions are assumed
throughout, a circuit diagram of a single phase adequately
represents the entire system.
Note that the numbered busses correspond to nodes in
the circuit diagram. Series elements in Figure 6-2 are
necessary to account for the transient synchronous imped
ances of machines, as well as the series impedances of
transformers, transmission lines and other transmission
equipment. The shunt branches are necessary to represent
electrical loads, and the shunt impedances of transformers
and transmission lines. (Departing from convention, the
loads are given in terms of admittances rather than power.)
Admittances are used consistently throughout this
paper; numerical values for admittance, voltage, current,

2 3 2 - jlO
1 - jS
1.0 - jO.S
1
2 + j0.3
Figure 6-1.
1
-jS
2
Single Line Diagram
- -jlO
j0.3 1
Figure 6-2. Per-Phase Circuit Diagram
3
54
-jo.s

and complex power are all in per unit. Briefly, for the
benefit of those not acquainted with it, the per unit
system is a scaling method wherein values are scaled by
applying the following equation:
per unit value = actual value base value
Although the choices of base values are arbitrary, they are
usually picked such that values of around 1.0 per unit are
encountered when the system is operated at its rated
capacity. Two of the base values are independent; all
others must be calculated from relations which must hold:
for example: if vbase and Ibase are chosen, zbase must be:
v base zbase = Ibase
For more details the reader should consult any text on
power system analysis; for example, see Stevenson's book,
Power System Analysis [6].
Any machine may be considered to be the reference
machine; in the following examples it is always numbered
number one. Also, the point at which the fault is to occur
is designated as a bus, and for convenience is numbered
last. Time is referenced from the instant the fault occurs.
The effect of a speed control loop placed on the reference
machine, which will eventually restore the system frequency
to ws, is considered. ws is taken to be 377 electrical
rad/s which corresponds to a 60 Hertz system. The angle
o. is measured in electrical radians. 1
55

It should be noted that, except for the two machine
problem, Tc' the critical clearing time, cannot be
determined exactly by any method used in this paper. Even
with a numerical solution of the differential equation, all
that can be said is that clearing the fault at t = T1
results in a stable system while clearing the fault at
t = T1 + ~t results in an unstable system, where ~t is
finite (i.e., T1 < T < T1 + ~t). As an approximation, - c -
the correct value of T c is computed from Equation (6-1) :
56
T ::: Tl + ~t
2 (6-1)
c
The optimum value for ~t was investigated and a value
of 0.02 seconds was decided upon, commensurate with the
accuracy of the stability functions. This value was used
in all four examples. The validity of the stability
function developed in Chapter V will be demonstrated by
applying it in four examples.
Initial operating conditions for the system are
required. Normally such results would be obtained from a
load flow study, where the prime mover input powers (Ui's)
and bus voltages around the system would be known, and
the initial values on the oi's (oi 0 's) and the ei's are
calculated. Here the e.'s and the o. 0 's are taken as ~ ~
known and the u. values are calculated as shown: ~
n U. = o.o = L e.eky'k cos(o.o- (oko + ~ik))
1 ~ k=l ~ ~ ~
where the yik and ~ik values used are pre-fault.
(6-2)

Example I. The Two Machine Problem
The system chosen for the first example is the two
machine system shown in Figure 6-3. Table 6-1 lists
pertinent data for each machine.
e. M. 0 . 0 o. s o. u l. l. l. l. l.
Machine 1 1.3 0.05 0 0 0
Machine 2 1.4 0.04 -0.30 -0.330 -3.130
Table 6-1. Machine Data for Example I
The pre-fault Y' Matrix for this system is:
0.3-j4.0 0 +jO -0.3+j 4.0 0 +j 0 0 +j 0
0 +jO 0.4-jS.O 0 +j 0 -0.4+j 5.0 0 +j 0
-0.3+j4.0 0 +jO 5.3-j34.4 -l.O+jlO.O -3.0+j20.0
0 +jO -0.4+j5.0 -l.O+jlO.O 4.4-j32.9 -2.0+jl8.0
0 +jO 0 +jO -3.0+j20.0 -2.0+jl8.0 5.0-j38.0
As expected o 0 = o1s - o u - o ~ 0 since machine one is 1 - 1 - 1
reference. Note that for this example the number of
machines = n = 2 and the number of non-machine busses = m
= 3 requiring the Y' matrix to be 5 x 5, since n + m = 5.
Note that the fault occurs at node 5, i.e., the last.
The three values for the Y matrix are:
b518-j2.150
Ypre-fault = 270+j1.833
0. 270+jl. 8331 0.790-j2.165
57

Fault occurs at bus 5
3
5 3 - j20
2 - jlB
0.3 - j4.0
1 - jlO
1 - j0.4
Figure 6-3. System for Example I
4
1.0 + jO.l
U1 co

Yfaulted = F306-j3.494
~008+j0 .192
Fsl8-jl.995
Ypost-fault = ~273+jl. 657
0.008+j0.1921
0.385+j4.170
0. 273+jl. 6571
0.703-jl.967
These complex entries must be written in polar form
in order to evaluate the arguments of the trigonometric
functions in the stability functions. Converting the
pre-fault values to polar form:
yll = 2.212 <t>ll = -1.334 {radians)
yl2 = 1.852 4>12 = 1.424
y21 = 1.852 4>21 = 1.424
y22 = 2.278 4>22 = -1.254
The pre-fault values are used to compute the
initial prime mover input powers. From Equation {6-2)
59
ul 2
cos{<f>l;L) + Y12e1e2 cos(o 1 ° 0 0 4>12) = Y11e1 - -2
= 2.331
Similarly
u2 = 0.874
The critical clearing time T was determined for two c
cases: (1) without controlling the speed of the reference
machine, and {2) with speed control on the reference
machine.

Case 1. No Speed Control on the Reference Machine
For this case the stability function s 2 should give
exact results. The Runge-Kutta trial and error solution
gave stable results forT = 0.36 and unstable results for
T = 0.38. Therefore, from Equation (6-1):
Tc ~ 0.37 seconds
Stability Function results were as follows:
52 0 t < 0.36 seconds <
52 = -12.614 t = 0.36 seconds
52 = +21.336 t = 0.38 seconds
From Equation (6-1):
Tc ~ 0.37 seconds
It is possible to use phase plane analysis on a
two machine system. This was done, giving a result of
Tc = 0.368. The equal area criterion (which is the
equivalent of using the function 5 2 ) gave a value of
c c ~ 6 2 (o 2 = o2 (Tc)) equal to -2.02.
Extrapolating between o2 (0.36) = -1.931 and 62 (0.38) = -2.099 gives T = 0.371. The system swing curves are
c
shown in Figure 6-4 and 6-5.
Case 2. Speed Control Employed on the Reference
Machine
The problem was solved with a speed control loop
applied to the reference machine, as in Chapter III. It
60

s.o
2.5
2.0
1 ••
(f) I 0 z cr. ~ 0 u.s a: a: z o.o ........ a: -u.s ...... _. LLJ •1.0 0
-1.5
-e.o
-e.s
3.0
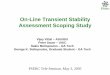
Fault cleared at 0.36 seconds
0.~ O.t& 0.1 1.2 1.1&
TIME TN 02
Figure 6-4. Stable Swing Curve for Example I: No Speed Control
2.0
m ....

3.0
2.5
2.0
l.S
(f) 1 a z a: ~ a o.s a: a:. a.o z ~
a: -o.s ~
_J ~ -1.0
•l.S
-2.0
-2.5
s.o
Fault cleared at 0.38 seconds
0.2 u.' u.s U.l t.o 1.'1 1.1& '·' TIME. IN SEC.
Figure 6-5. Unstable Swing Curve for Example I: No Speed Control
t.a ~0
0'1 N

3.0
z.s
2.0
l.S
(f) t,O z a: 8 o.s a: a: 0.0 z ......
-o.s a: 1-...J -1.0 w c
-1.5
-i.O
~.s
-3.0
Fault cleared at 0.62 seconds
o.z 0.1& . o.e. Cl.l
02
Figure 6-6. Stable Swing Curve for Example I: Speed Control
2.0
(j\
w

s.o
z.s
z.o
l.S
(f) z 1.0
a: ...... Cl o.s a: a: o.o z ..... a: -a.s 1-_J LLJ •1.0 c
•1.5
-2.0
-2.5
-s.a
Fault cleared at 0.64 seconds
o.z . 0.' 0.1 0.1 . 1.0 !.Z l.ll 1.1
TIME IN SEC.
Figure 6-7. Unstable Swing Curve for Example I: Speed Control
, .. l.O
0'\ ~

was necessary to choose the constants K1 and K2 • The
criterion for selection was that the speed control loop
exert a noticable effect on the reference machine speed
and yet not hold it absolutely constant. Satisfactory
values were found to be K1 = K 2 = 0.1. These values
were subsequently used for all examples.
Results are as follows. By trial and error:
Tc ~ 0.63 seconds
Using the stability function:
t < 0.62
t = 0.62 s 2 = -2.364
t = 0.64 s 2 = +4.400
Tc ~ 0.63 seconds
Note that the application of the speed control loop
has made the system considerably more stable. Also note
that s 2 , although giving excellent results, is strictly an
approximation at this point since u1 is not constant. The
swing curves for this system are given in Figures 6-6 and
6-7.
Example II. The Three Hachine Problem
The pre-fault, faulted, and post-fault single line
diagrams for a three machine problem are shown in
Figures 6-8(a), 6-8(b), and 6-8(c), respectively. Refer
to Table 6-2 for pertinent machine data.
65

Fault occurs at bus 7
4 7
3 - j20 6
1.0 + jO.l .. 2 - jl8
1'- j0.4 5 0.4 - j5.0
2 - jl5
1 - jlO
0.2 - j3.0
0.6 - j0.3
Figure 6-S(a). System for Example II (Pre-Fault)
0'\ 0'\

4
3 - j20 6
2 - jl8
1 - j0.4 5
2 - jlS
1 - jlO
0.2 - j3.0
0.6 - j0.3
Figure 6-8 (b) • System for Example II (Faulted}
1.0 + jO.l ..
0.4 - jS.O
0'1 -....1

4
6
1.0 + jO.l ...
1 - j0.4 5 0.4 - jS.O
2 - jlS
1 - · jlO
0.2 - j3.0
0.6 - j0.3
Figure 6-S(c) •. System for Example II (Post-Fault}
0'\ CX)

e. ~
M. ~
o.o ~
u. ~
Machine 1
Machine 2
Machine 3
1.3 0.05 0 0 0 0.542
1.4 0.04 0.20 0.250 2.592 2.259
1.35 0.03 0.20 0.233 2.532 1.284
Table 6-2. Machine Data for Example II
For this example, n=3 and m=4, so that the pre-fault
Y' matrix is 7 x 7. The pre-fault, faulted, and post-
faultY matrices are all 3 x 3. The complete numerical
results for this ex~mple are shown in the appendices. Refer
to Appendix A for a complete list of the pre-fault, faulted,
and post-faulted matrices, and the program which computes
the Y Matrix from Equation (5-4) • s The stable and unstable equilibrium values, o. and
~
o.u in Table 6-2 are computed from Equation (5-20). ~
of the solution are presented in Appendix B.
Details
Equation (5-17} for i=2, with values that hold in
the faulted interval, is:
1 2 M2 [U2 - (e2ely21 cos(o2- ~12) + e2 Y22 cos(~22)
1 + e2e3y23 cos(o2- o3- ~23)}] - Ml [Ul
69
- (el2Yll cos(~ll) + ele2yl2 cos(o2 + ~12}
+ ele3yl3 cos(o3 + ~13))] (6-3)

70
and
do 2 dt = ().2 (6-4)
The faulted y and ¢ values for substitution in the
above equations are:
yl1 = 3.484 ¢11 = -1.482
y12 = 0.117 ¢12 = 1.514
yl3 = 0.177 ¢13 = 1.510
y21 = 0.117 ¢21 = 1.514
y22 = 4.161 ¢22 = -1.477
y23 = 0.303 ¢23 = 1.559
y31 = 0.177 ¢31 = 1.510
y32 = 0.303 ¢32 = 1.559
= 2.549 ¢33 = 1.489
The stability function s 2 is:
Where the y's and ¢'s are the post-fault values:
yll = 2.223 ¢11 = -1.363
yl2 = 1.002 ¢12 = 1.394
y13 = 0.801 ¢13 = 1.417

y21 = 1.002 cp21 = 1.394
y22 = 2.484 cp22 = -1.320
y23 = 1.089 cp23 = 1.444
y31 = 0. 801 cp31 = 1.417
y32 = 1.089 cp32 = •. 444
y33 = 2.153 cp33 = -1.436
A second pair of equations for machine three similar
to Equations ( 6- 3 ) and (6- 4) ' is required as in the
expression for s3. These are sufficient to solve for 02
and o3 since o1 = a 1 = 0 by definition, and s 1 = 0. It is
clear that the solution even for this three machine problem
is quite involved. Consult Appendix C for details.
Table 6-3 summarizes the results.
Trial and Error
Without
Speed
Control
With
Speed
Control
Stability Function
S2(0.36) = -13.1
S2(0.38) = +31.1
s 3 < o, t ~ o.38
Tc ~ 0.37
S2(0.34) = -36.2
S2(0.36) = +11.3
< s 3 < o, t = o.36
Tc ~ 0.35
Table 6-3. Results for Example II
71

Ll
Ll
Ll
••• ~ a.a a: .... 0 ... a: a:
D. I z ..... a: .0,.1
.....
...I LLJ -a.a c
•l.l
-LI
....
... ,
Fault cleared at 0.36 seconds
... .. , ... ... TIME IN SEC •
Figure 6-9. Stable Swing Curve for Example II: No Speed Control
~ I'V

LO
Ll
u
... ~ ..• a: ..... eLl a: a: z .... ..... a: -o.a 1-...J ~ ....
•I .I
-1.1
-LI
....
Fault cleared at 0.38 seconds
... ..., ... .. . ••• ... .., 1.1
TIHE IN SEC.
Figure 6-10. Unstable Swing Curve for Example II: No Speed Control
1.1 Ll
.....J w

3.0
t.S
t.O
t.s
<n z 1.0
a: t-4 CJ o.s a: a:
0.0 z t-4
a: -o.s t-_J w -t.o c
•t.S
-2.0
-2.5
I -1.0 II
0.1 . 0.' '·" TIME IN SEC.
.Fault cleared at 0. 34 seconds
Figure 6-11. Stable Swing Curve for Example II: Speed Control
1.1 t.O
-...! ~

,.o
2.5
2.0
l.S
(/') 1.0 z a: ..._..OS o· a: a: 0..0 z ...... a: -o.s t-..J -1.0 w 0
-l.S
-z.o
~.s
-3.0
Fault cleared at 0.36 seconds
0.2 o.• 0.1 0.1 a.o 1.1 a.• '·' TIME IN SEC.
Figure 6-12. Unstable Swing Curve for Example II: Speed Control
, .. 2.0
--...! U1

Figures 6-9 through 6-12, inclusive, show the system
operating with T < Tc and T > Tc both with and without
speed control on the reference machine.
Example III. The Four Machine Problem
The four machine system selected for study is shown
in Figure 6-13. Note that n=4 and m=6. The machine data
are shown in Table 6-4.
Machine 1
Machine 2
Machine 3
Machine 4
e. ~
M. ~
u. 1
1.30 0.05 0 0 0 0.185
1.40 0.04 0.2 0.214 1.786 1.556
1.35 0.03 0.6 0.661 2.717 2.357
1.20 0.03 0.5 0.529 2.431 1.793
Table 6-4. Machine Data for Example III
Example III has an interesting feature. If a system
is going to be unstable, the machines usually will pull
out of synchronism on the first swing. The reason for this
is that the damping effects of the system usually insure
that the first swing is the most severe. There is no
guarantee, however, that the machine can not drop out of
synchronism during a later swing.
Examine Figures 6-14, 6-15, and 6-16. Note that in
Figure 6-14 the fault is cleared at t = 0.20 and the system
76

is stable. Now in Figure 6-15 the fault is cleared at
t = 0.22 and the system survives the first swing, but
synchronism is lost on the second swing. Clearing at
t = 0.24 produces instability on the first swing, as
shown in Figure 6-16.
Results are presented in Table 6-5.
Trial and Error
Without
Speed
Control
With
Speed
Control
Stability Function
53(0.18) = -4.6
53(0.20) = +22.4
52 < 0, s 4 < 0,
t < 0.22
T ~ 0.19 c
53(0.20) = -7.7
53(0.22) = +3 .0
52 < 0, 54 < 0,
t < 0.24
T ~ 0.21 c
Table 6-5. Results for Example III
77

0.3
-j4
Fault occurs at bus 10
5
I
6
1 - jlO
1 - j0.4 1 + jO.l-~4 9 1 - jlO -j5.0 .
0.5 - j8 I 1 - jl5
1.0
10 ......... -1 - jl5
3 - j30 2 - j20
?_..,.. ...... ....,_ ..... _ a_.......,_..._,... .... _
0.2 - j3.0
0.6 - j0.3
0.2
-j3.0
Figure 6-13. System for Example III
0.5
-..J 00

... ••• ... , .•
I '·' ..... 0 ... a: a: z 0.0 .... a: -o.t .... ~ •1.0
•&.t
.....
.....
....
Fault cleared at 0.20 seconds
Figure 6-14. Stable Swing Curve for Example III: No Speed Control
'-l \0

... 1.1
a.o
l.l
~ t.O
..... 0 0.1 a: a: z 0.0 .... U.t ... , ••• ...... a: -o.s TIME IN SEC. I-..J LtJ •l.O Fault cleared at 0.22 seconds Q
•••• .... 0
..... -a.o
Figure 6-15. Unstable Swing Curve for Example III: No Speed Control (Second Cycle)
-t.O
(X)
0

.. , 1.1
a.o
1.1
t/) s.o z a: ..... 0.1 0 a: a: 0.0 .z ..... a: -o.t .... trl -s.o 0
•1.1
-e.o
.....
.... Figure 6-16.
TlHE TN SEC . Fault cleared at 0.24 seconds
Unstable Swing Curve for Example III: No Speed Control (First Cycle)
(X)
1-'

s.o
2.1
t.O
l.S
(f) a.o z a: 0 o.s a: a: o.o z ..... a: -o.s ...... _, -a.o w 0
-a.s
-e.o
-e.s
•S.O
Cl.2 .... .... .... a.o a.t '·' • •• TTME TN SEC.
Fault cleared at 0.22 seconds
Figure 6-17. Stable Swing Curve for Example III: Speed Control
• •• t.o
co I\)

t.O
••• 1.0
•••
~ a.o cr ~
0 o.• a: a: o.o z ~
a: -o.• t-..J lJJ •t.O c
•t.l
-e.o
.... -a.o
TTHE TN SEC. Fault cleared at 0.24 seconds
Figure 6-18. Unstable Swing Curve for Example III: Speed Control
00 w

Example IV. The Seven Machine Problem
The largest system considered in this paper was the
seven machine system shown in Figure 6-19. Here n=7 and
m=l2. Machine data appears in Table 6-6.
Machine 1
Machine 2
Machine 3
Machine 4
Machine 5
Machine 6
Machine 7
e. 1
M. 1
0 . 1
0
u. 1
1.30 0.05 0 0 0 0.553
1.40 0.04 0.2 0.200 2.442 2.225
1.20 0.03 0.4 0.400 2.767 1.945
1.35 0.03 0.2 0.200 2.459 1.284'
1.30 0.03 0 0.000 2.132 0.405
1.40 0.04 0.5 0.500 2.914 2.642
1.40 0.02 0 0.000 2.209 0.249
Table 6-6. Machine Data for Example IV
The results for this example are shown in Table 6-7.
The swing curves for this example are found in Figure 6-20
through Figure 6-23.
84

85
Trial and Error Stability Function
Without S6(0.46) = -1.0
Speed S6(0.48) = 17.3
T !:! 0.47 c Control
s2 < 01 s3 < 0 1 s4 < 0
ss < 01 s7 < 0 ; t < 0.48 -
With S6{0.38) = -21.6
Speed Tc !:! 0.43 S6{0.40) = +4.02
Control T !:! 0.39 c
s2 < 01 s3 < 0 1 s4 < 01
ss < 0, s7 < 0; t < 0. 40 -
Table 6-7. Results for Example IV

8 1 - j10
9
II 11-j0.4 1 + jO.l1 II
2 - j20
0.2 - j3.0 2 - j20 0.2 - j3.0 2 - j20
10 I I I I p 11 I I I I I
1.0 2 -I 13 j20
2 - j20
1 - jl5
2 - j20
2 - j20 I • 1.5 - j0.3
1 - jl5 5 - j 50 1_8 1 - j10
15_....,_ 1 - il5 1 - jl5 6 17
2 - j20 1 - jl5
1.0 - j0.2
- j3 .1 -
Figure 6-19. System for Example IV
14
Fault occurs at bus 18
1.0 - j0.3
00 0'1

1.0
1.1
LO
1.1
~ '·' 0: ..... c 0..1 a: a: z 0..0 ..... a: -o..l .... ..J laJ -1.0 0
•1.1
-1.0
-1.1
-1.0
Fault cleared at 0.48 seconds
Figure 6-20. Stable Swing Curve for Example IV: No Speed Control
0
00 ......,

Ll
Ll
Ll
1.1
(I) z a.a a: .... c 0.1 a: a: z a.o .... cr. .0.1 .... cd •1.1 Q
•1.1
-e.o
..... -a.o
Fault cleared at 0.50 seconds
Figure 6-21. Unstable Swing Curve for Example IV: No Speed Control
(X) (X)

3.0
2.5
2.0
l.S
en t.o z a: ....... OS o· cr a: 0.0 z .......
-o.s a: t-....J ·1.0 w 0
-1.5
~.0
~.s
·3.0
TIME IN SEC. Fault cleared at 0.42 seconds
Figure 6-22. Stable Swing Curve for Example IV: Speed Control
co 1.0

3.0
2.5
2.0
1.5
(f) 1.0 z cr .- 0 s o· a: cc o.o z to--1
-Q.I) a: t-_J -1.0 w 0
-1.1)
~.0
~.5
3.0
TIME IN SEC. Fault cleared at 0.44 seconds
Figure 6-23. Unstable Swing Curve for Example IV: Speed Control
\0 0

CHAPTER VII
CONCLUSIONS
A method has been developed by which a prediction of
the critical clearing time of a power system containing
n-machines may be made. Application of the method requires
that a stability function denoted in the paper as s. be 1
calculated for each machine. The function s. is given 1
in Equation (5-26). The constants required in S. are the 1
post-fault Y matrix, the voltage behind transient reactance
for each machine, the prime mover input powers, and the
unstable equilibrium states of the system. The variables
are the rotor angles (o.), measured with respect to a 1
reference machine, and their velocities (a1 = doi/dt),
which are parametric in time.
Initially, all the s. functions are negative, unless 1
the system is destined to be unstable for any clearing
91
time. Starting at the instant of the fault, each S function
is evaluated at the end of equal time increments by
substituting current values of the o's and a's. This is
continued until one of the S functions reaches zero. The
time at which this occurs is an approximation of Tc.
The advantages of the method include:
(1) The method predicts the future state of the
system (i.e., stable or unstable) instan
taneously. This means that the method may

be applied to real time control of a power
system.
(2) The method indicates which machine is the
first to lose synchronism.
(3) The magnitude of the S. function can be 1
interpreted as a sort of margin of stability
for its corresponding machine, although care
must be taken here as the Si functions are
quite non-linear and their rate of change
with time can be rather steep as they
approach zero.
(4) The accuracy of the method for all systems
investigated by the author was quite good.
The method has the following disadvantages:
(1) The method, while quite accurate, is not
exact.
(2) The method requires the inputs of the o's
and a's. However, since power systems are
inherently non-linear, it is not clear that
it would ever be possible to avoid using
some sort of parametric variables. However,
it is quite possible to devise a means of
obtaining analog signals from a physical
system to represent these variables.
(3) The method is numerically complicated but no
more so than other approaches to the problem.
92

The following observations could be made concerning
the method. The Si function is most in error initially.
As the critical clearing time is approached, the accuracy
of s. improves. Because of the good results obtained with 1
speed control, in particular in Example I, it is felt that
the method is amenable to modification to include damping
torque and peripheral systems such as exciter control.
Also, a sequence of disturbances, such as breaker openings
and reclosings at various points in the system, could be
considered. For all systems tested, the method, when not
exact, gave conservative results, i.e., the S functions
indicated instability before the system actually became
unstable.
93

BIBLIOGRAPHY
[1] CRARY, SELDON B. (1945), Power System Stability.
Vol. I, John Wiley and Sons, Inc., New York,
284 p.
[2] KIMBARK, EDWARD W. (1948), Power System Stability.
Vol. I, John Wiley and Sons, Inc., New York,
347 p.
[3] KIMBARK, EDWARD W. (1950), Power System Stability.
Vol. II, John Wiley and Sons, Inc., New York,
275 p.
[4] KIMBARK, EDWARD W. (1956), Power System Stability.
Vol. III, John Wiley and Sons, Inc., New York,
315 p.
[5] FITZGERALD, A. E. and CHARLES KINGSLEY, JR. (1961)
Electrical Machinery. 2nd Edition, McGraw-Hill
Book Company, Inc., New York, Toronto, London,
pp. 249-274.
[6] STEVENSON, WILLIAM J. (1962), Elements of Power
System Analysis. 2nd Edition, McGraw-Hill Book
Company, Inc., New York, San Francisco, Toronto,
London, 388 p.
[7] STAGG, GLENN W. and ARMED H. EL-ABIAD (1968),
Computer Methods in Power System Analysis.
McGraw-Hill, Inc., New York, St. Louis, San
Francisco, Toronto, London, Sydney, pp. 365-419.
94

[ 8 l RAO, N. DHARMA (June, 19 62) , "A New Approach to the
Transient Stability Problem". A.I.E.E. Power
Apparatus and Systems No. 60, pp. 186-192.
[9] RAO, N. DHARMA and H. N. RAMACHANDRA RAO, (1963}, "An
Extension of Conventional Phase Plane Techniques
to the Solution of Multimachine Transient
Stability Problems". Special Supplement I.E.E.E • •
Transactions on Power Apparatus and Systems,
pp • 6 9 7-712 •
[10] VAN NESS, J. E. (1963), "Root Loci of Load Frequency
Control Systems". Special Supplement I.E.E.E.
Transactions on Power Apparatus and Systems,
pp. 712-725.
[11] LAUGHTON, M.A. and M. W. HUMPHREY DAVIES (1963),
"Improved Stability Calculations", Special
Supplement I.E.E.E. Transactions on Power
Apparatus and Systems, pp. 727-739.
[12] GLESS, G. E. (February, 1966), "The Direct Method of
Liapunov Applied to Transient Power System
Stability", I.E.E.E. Transactions on Power
Apparatus and Systems, Vol. PAS-85, No. 2,
pp. 159-168.
[13] EL-ABIAD, A. H. and K. HAGAPPAN (February, 1966),
"Transient Stability Regions of Multimachine
Power Systems", I.E.E.E. Transactions on Power
Apparatus and Systems, Vol. PAS-85, No. 2,
pp. 169-179.
95

[14] YU, YAO-NAN and KHIEN VONGSURIYA (December, 1967),
"Non-Linear Power System Stability Study by
Liapunov Function and Zubov's Method", I.E.E.E.
Transactions on Power Apparatus and Systems,
Vol. PAS-86, No. 12, pp. 1480-1485.
[15] UNDRILL, JOHN M. (March, 1968), "Dynamic Stability
Calculations for an Arbitrary Number of Inter
connected Synchronous Machines", I.E.E.E.
Transactions on Power Apparatus and Systems,
Vol. PAS-87, No. 3, pp. 835-844.
[16] LA SALLE, JOSEPH and SOLOMAN LEFSCHETZ {1961),
Stability by Liapunov's Direct Method with
Applications, Academic Press, New York, London,
132 p.
[17] HAHN, WOLFGANG (1963), Theory and Application of
Liapunov's Direct Method. Prentice Hall, Inc.
Englewood Cliffs, New Jersey, pp. 1-82.
[18] ZUBOV, v. I. (1957), Methods of~· M. Lyapunov and
Their Application. Translated from the publish
ing house of Lenningrad University, U. S. Atomic
Energy Commission, Divisions of Technical
Information, pp. 63-148.
[19] MONROE, ALFRED J. (1962), Digital Processes for
sampled Data Systems. John Wiley and Sons, Inc.,
New York, London, pp. 404-449.
96

[20] JENNINGS, WALTER (1964), First Course in Numerical
Methods. The MacMillan Company, New York,
pp. 147-151.
[21] SPORN, PHILIP (1966), Research in Electric Power.
Pergamon Press, Oxford, London, Edinburgh,
New York, Toronto, Paris, Frankfurt, from 3
lectures given at Cornell University in May,
1965, 64 p.
97

GLOSSARY OF COMPUTER NOTATION
Angle measured from the rotor of
Th . th h' e 1 mac 1ne to the rotor of
the reference machine 6. (t.) 1 J
Stable equilibrium value of 6. 1
Unstable equilibrium value of 6. 1
do. 1
dt
Synchronous speed
Speed of the reference machine
Number of machines
Number of machine excluded busses
Number of time increments
Time increment
Number of runs through Runge-
Kutta Program
Clearing Time
rms voltage behind transient
f h . th reactance or t e 1
machine
Dissertation
Symbol
0 . j 1
0 . s 1
0. u l.
a. l.
(jJ s
(jJ r
n
m
Llt
T
e. l.
98
Computer
Symbol
X(I,J)
XS(I)
XUS(I)
D(I)
ws
WR
N
M
M
DT
KL
NC*DT
E (I)

Inertia constant
•••, Q I (l.) n ~
af./ao. ~ J
Runge-Kutta constants
Stability function for the ith
machine
Magnitude of elements of the
Y prime matrix
Angle of elements of the
Y prime matrix
Magnitude of elements of the
pre-fault Y matrix
Angle of elements of the pre-
fault Y matrix
Magnitude of elements of the
faulted Y matrix
Angle of elements of the
faulted Y matrix
M. ~
f. ~
af./ao. ~ J
kli
k2i
k3i
k4i
1li
12i
1 3i
14i
s. ~
y' .. ~]
<I> I • • ~]
y .. ~J
<I> •• ~J
Y·. ~]
<I> •• ~]
XM(I)
F(I)
DF{I,J)
XKl (I)
XK2 (I)
XK3(I)
XK4 (I)
DKl(I)
DK2(I)
DK3(I)
DK4(I)
SF(J)
Y(I,J)
ANG(I,J)
YA(I,J)
ANGA(I,J}
YB(I,J)
ANGB(I,J)
99

Magnitude of elements of the post-
fault Y matrix
Angle of elements of the post-
fault Y matrix
y .. 1)
cp • • 1)
100
YC(I,J)
ANGC(I,J)

APPENDIX A
DETERMINATION OF THE Y MATRIX
The reduced matrix Y, ~hich is n x n, is needed to
represent the passi~e part of the power system. It is
calculated from Equation (5-3), repeated here for
convenience:
The reader will recall that YAA' YBA' and YBB are sections
of the partitioned Y' matrix. !n the pre-fault case, the
Y' matrix is (n+m) x (n+m). The point in the system to be
faulted was given the last bus number, and included in the
"m" count. Since this bus is tied to reference in the
faulted case, and remo~ed in the post-fault case, the Y'
matrices for these cases are (n+m-1) x (n+m-1). A computer
program was written which takes as its input the partitioned
pre-fault Y' matrix, n, and m, and computes the pre-fault,
faulted, and post-fault Y matrices. A list of the program
is given here. Note that data is for Example II.
101

C CO~PlJT~IIDN OF Y MATRIX FROM Y' MATRIX C EX7HW1.~ll
CG~PLEX Y(20,20J,AAClC,lO),AB(lO,lO),BA(l0,10),B8(10tlOJ,SUM,8(10) l,CClQ)
---------~l~~NSION tP(lO),JQ(lOl,RAO(lO,lOJ,ANG(lO,lOJ N=1 M=3 M=4 Dn-?TTI KF = 1 , 3
s J:~~tE~~!~o8l 5 LX=~
-----r:n rn· a--6 WRITE('3,900)
l X= ~~-1 r.o rr. 8
---------r7,W~ITF(3,IOOOJ l X= "'-1 (,0 TO R
8 LY=LY+N ------ -wR T Tf: ( 1, 500 l
{)f"l 10 1=1,LY P F. t\f'1 ( 1, 1 C 0) ( Y f I , J) , J= 1, l Y)
------~1~0~hRtTF(1,?00)(Y(I,J),J=l,LV) .TT7rT=-r-;r.r nn 20 J=l,N
2C t..h(J ,J)=Y( l ,J) 00 •r. 1=1,~
- n 0 3 C J = 1 , L X ----K=N+J
3C 1\R(J,J):Y(I,K)
----------~r.n 40 I=l,L~X~--------------------------------------------------------------------------------0 4t J -T;-K =t,! + l l 40 PI\( I ,J)=Y(K,J) On '>C l=l,LX -- --on so J=l,LX -K=N+I L=''HJ
50 ARC I,J!=YCK,L)
...... 0 1\)

L ttJr1P(Jlct1H 1NVEI<SE,CALL ll BB EPS=l.OE-0'5 C~Ll CINVRT(BB,lO,LX,EPS,OELTA,B,C,IP,IQ,KEYJ JF(l-KEY)60,60,125
ou-cnNTT 1\JUF -----------------------------------------------------C COMPUTE RB*B~,C~LL IT V
CO AC l=l,LX _________ n_n RO J=ltN_.
~\PI= ru~--.--u--.-----------------------------------------on 70 K=l,LX
10 SUM=SUM+R~I I,K)*BA(K,J) 80 Y(J,J)=SIJ'-1
----~c-- --cn~P\JTE A8*Y9CAtt~.-n~----------------------------------------------------------OO 110 I=l,N Of1 110 J=l,N Sll~=lO.O 0.0) DO ':tC: t<=f--,:--f----<~------------------------------------------
qo SU~=SUM+a~(I,Kl*Y(K,J) 110 AA(I,J)=SUM
C SIJ~TPACT [31\ FROM AA,CALL IT Y flO l 7 (; I= 1'"' --- - -------------------------------------------------[)n 120 J=l.,~
120 Y!l,J)=I\A(l,J)-RA(I,J) \\PITEI1,600)
--------no-t~~t-~,~----------------------------------------------------------------130 WRITE(3,200)(Y(l,J) 1 J=l 1 N)
C CONVF.RT THE COMPLEX Y'S TO POLAR FORM WPITE(3,700)
~----no 1 qo 1 = 1, N- ------------------------------------------------=---no too J=l,~ X=REAUY( I,Jl) 7=A }VAG{ Y{ I ,J))
I R-frft·H--,-j-)-=S(~I{T~~~~~""t----------------------------------------------------IF( X) l4C, 150,180
l4C ~NG!I,Jl=ATAN(Z/X)+3.1415q2654 h0 rn 185
t-----tsc-CflNT INUf IF(Z)l60,170,17C
160 ANG{ I,J)=-3.141592654/2.0 r,n TO 1~5
I 170 ANG1~~~+~~-.~t~~~trs~q~2~6~5~4h/M2~.~o~-----------------------------------------------------------------Gn TO lR5
180 ANG(J,J)=ATAN(l/X) 185 OFG=( 1R0.0/3.1415q2654)*ANG(t,J)
...... 0 w

. WRI-TE t 2--,300 )Rf\Ot-1-,.J), ANG ( t ,J) ,OE . lqO WRJTE(3,300lRAO(I,J),ANGCI,J),OEG 125 WPITF(3,400)KEY 21C CONTINUE
----~~c-rn~~r\sr?.Y+~.~~-----------------------------------------------------------------------zcc FORM~T(6(2Fl0.3)) 3GC FOR~AT(4FlA.8J 400 FGP~AT(lJlO)
---50 C FOR~ AT t 2~ X, UH-HHE-y--PR I ME-- f.1A-TRI-x-t-----------------------,--------f.GC F8RMAT(l0X,l2HTHE Y MATRIX) 700 FOP~ATC7X,llHY MAGNTTUDE,7X,7HY ANGLEtllX,l8HY ANGLE IN DEGREES) P-00 rnQMAT(lX,lgHPREFAULT CONOITIONSl
----ooo-rn~M~T-t-txtt--t;HF-tttt~T1D~-t--------------------------------------------------
1
1GOG FOR~AT(lX,21HPOST FAULT CONDITIONS) STOP END
·----- -------·
--- -·------- ------- -------------------------------------------.....-----
1--' 0 ~

PREFAULT CONDITIONS
O.oJO -4.CCC c.o O.G o.o o.o o.o o.o C.4CC -S.OOG o.o o.o o.o o.o o.o c.o C.'l c.: 0.200 -3.GJO o.o c.o
-G.300 4.000 ___ -·· n- r, (,- r o.o o.o -3.0~0 zo.oco o.o o.o o.o o.c O.C G.O
-2.010 l'l.OC'O o.o o.o 5.000 -38.00()
THE Y ~l\TRJY e-;-t!50 2.415 0.194 1.300 0.1?1 G.812
o.c o.o -c.zoo 3.GOO
-C. 4GC ~.coc o.o o.o 0.0 c.o o.c o.o
~ t. ~a a a. t n ---i)--;-ittr 0.1>11 C .14C
-?. 736 C.140 l.C59 1.csg o.z9o -2.1>5
Y A'<GLE -1. 3<iC9Q'J<f8
1.43C53t27 1o42344lfC
Y ANGLE IN DEGRFtS Y MAGNITUDE 2.'H544952 1.31272793 O.R212R042 1. 31?7?9R4 - 1.43053627
-79.69819641 111.96368408 Pl.55720520 81.963684011
-0.3GO 4.000 o.o o.o o.o o.o o.o o.o o.o 0.0 -o. 400 5. 000
a.o o.o -0.200 3.000 o.o o.o
~.300 -34.400 - 1. 00 0 10.000 o.o o.o ~-----~
-1.00 0 10.000 3.800 -28.300 -2.000 15.000
o.o o.o -2.000 15.000 5.400 -37.900
-3. oc 0 20.000 o.o 0.0 -2.000 18.000
~. ~0~2~56() -1. 3511•5•:: -~-=ff;;t,~~~-~--~- -------~-----------~----~---~---------~-
1.06798458 1,4393<J?C'l R2.4 7108459 81.557205?0 82.47108459
0.82128036 1.4?34418S 1.C6798458 1.4393G?(G 2.15455914 -1.43572617 -82. ?610'•736
1 FAULT CONDITIONS
THf Y PR1'1E "'I, T'<l X O.JOO =4.000 0.0 ~e-~-~--~~------tJ-. --it; 30 0 4 ;-oo-tt--------o-.-tr-~~~;tr---~-ttott-~ o.o o.o 0.400 -5. OGU 0.0 0.0 0.0 0.0 0.0 0.0 -0.400 o.o o.c c.c o.o 0.200 -3.000 o.o o.o -0.200 3.000 o.o
-0.380 4.000 o.o o.o o.o o.c Q,O C.C -0.4CG
G.C 0.0 O.C 5.300 -34.400 -1.000 10.000 0.0 o.o -o.zoo 3.ooo -1.ooc 1o.ooo 3.soo -ze.3oo -z.ooo s.cco o.o o.o o.o o.o -2.000 15.ooo 5.400
THEY MATRIX 0.3J9 -3.470 C.OC7 0.116 0.011 0.177 o.oor ----cJ.lttf ___ ~-- 'l.t43 -- o.-ca<r-----~----- ----0.011 0.111 o.oo4 c.101 0.201 -2.o41
Y MAGNITUDE Y ANGLE Y ANGLE IN DEGREES 3.48365784 -1.482C756S -84.9\667175 ~.llli665Gl 1.5l40!32g 86. /41)51)5TT ___________________ _ 0.17691112 1.5097?742 86.50100708 J.11666501 \.51401329 P0.74656677 4.16145229 -1.47703743 -84.62800598 0.30285800 1.55891991 89.319~1904 0.17691112 1.50o7774r R6. 50100708 0.30285776 1.5'891991 89.11951904 2 [54925632 --~- -1.4P'l339P3 -:'l20_lL~Jlii't_
POST FAULT CONO IT IONS THE Y PR I MF
u.u 5.000 o.o o.o
15.0(}{). -37.900
0.300 -4.000 o.n MATRIX
c.o o.o a.o -0.300 4.000 o.o o.o o.o o.o o.o o.o 0.400 o.o o.o o.o
-0.300 4.000 o.o o.o o.o o.o o.o o.o 0.4-uo-~
THEY "1ATRIX 0.459 -2.176 0.176 0.176 0.986 0.616 0.123 0.792 0.13R
Y "1AGNITUDE Y ANGLE
-5.000 c.o 0.0 0.1) 'l.---n::rD
o. 986 -2.407 1.~81
2.22338fl67 -1.36293316 1.00160122 !.393692G7 o:lro095321 --T.41 /1)99'15 1.00160122 1.393692S7 2.4R432541 -1.3?030!65 1,0R936214 1.44411659 C.B0095315 1.417(99'15 1.08936310 !.44411659 2.15309811 -1.4,578720
-----~1---~--~----~--- -~---
0.0 J.C 0.0 C.200 -3.000 0.0 o.o o.o 2.300
-o.2oo 1.coo -t.ooo ~-----u.c;--~--~
0.12~ o. 797 D.l3R !.CAl o. 290 -2. 134
Y ANGLE I'J DEGRFFS -78.09031677
7'l.A5272217 ---,T.1~
79. R527nl 1 -75. 6528f>255 R~. 74177551 R1.1'l383240 R1.7417755l
-R~.26454163
o.o o.o o.o -o.~too -s~ouu o.o -0.200 3.000 o.o o.o
-14.400 -1.000 10.000 0.0 0.0 lO.OOC 3.800 -28.300 -2.000 15.000
• -=-Town- !5.000 3.400 -!9.900
1--' 0 Ul

APPENDIX B
COMPUTATION OF THE EQUILIBRIUM STATES USING
THE NEWTON-RAPHSON METHOD
The equilibrium states are calculated from simul-
taneous solutions of Equation (5-20). Note that the
equations below include an additional term B. (do./dt). l. l.
106
Although the computer program was written so that damping
power could be included, in all the examples studied B. l.
was set to zero.
Recall Equation (5-15) :
da.. l.
dt = U. - P.
l. l.
M. l.
ur - P B. r l. -_,...,M_r_ - Mi a i
At steady-state equilibrium, Ur = Pr and a.i
da.. l. 0 and u. = P.
dt = l. l.
Define h. = u. - P. (i -:j r) l. l. l.
n
= 0. Also
= u . - e . I eky . . cos ( o i - o k - ~ ik) l. l. k=l l.J
ah. __ l. = - e . e . y . . sin { o . - o J. - ~ i j ) ao. 1. J l.J 1.
J
i 1 j
i -:j r
j -:j r
(B-1)
(B-2)

107
and
()h. n l. I sin(o. ~ = e. ekyik - ok - <t>ik) i t j l. l. k=l l.
ktl i t r (B-3)
The method used will be based on the Newton-Raphson
Simultaneous Equations Technique. Define the following:
6. 0 =the starting value chosen for 6 .. Elsewhere l. l.
in the paper 6. 0 is defined as the initial l.
pre-fault value of o .. l.
hiO = hi(010' 620' •••, QnO)
()h. 0
l.
ao. J
ah. = l. (6 0 0 0 • • • 0 0)
~ 1' 2' 'n J
Expanding h. in a Taylor's Series about the known a's and l.
discarding second and higher order terms one obtains the
following approximation at equilibrium:
h. l.
Since or = 0, we need only deal with (n-1) equations in
(n-1) unknowns, removing the rth one since it is known.
Defining
/16. = o. - 0. 0
l. l. l.
(B-4)
(B-5)

108
dh 1 0 dh o dh1
0
<~o 1> + 1 <~o 2> d (51 d<S2 + • • • + <~o > = -h 0
dOn n 1
dh 2 0 ah o
(~o 1> + + 2 (~on) do 1
• • • a<S = -h 0
n 2
•
•
•
dh 0 ah o n
<~ol> + + n (~on> -h .o • • •
dOn = dOl n
(B-6)
dh1 0 dh1
0 dh1 0
do 1 • • •
don do 2
ah2 0
• • • ao 1
~ = • • (B-7)
•
• •
ah 0 ahn 0
n • • • a on ao 1

Using Cramer's Rule:
()h 0
1
( . th 1 column)
• • • - h 0 •••
1
• • • - h 0 •
2
()h 0 1
•
109
• • (B-8)
• •
• •
•• 0 - h 0
n 0 • •
•
()h 0
n ao n
Next replace 6. 0 with 6. 0 + ~6 1. and iterate. A ~ ~
computer program to accomplish these calculations was
written and a list of the program is given here. The
particular equilibrium state to which the program converges
depends upon the starting values used. It was found that
the stable state (o.s) was determined using the initial 1
values of o. (6. 0 ) as starting values. The proper starting 1 ~
values for convergence to an unstable equilibrium state
were computed as follows:
o. 0 . s for 0 . s > 0 = 1T -
~ 1 ~
0 . 0. s for 0 . s < 0 = -1T -
1 ~ 1
Applying the method to Example II, the following
data are inserted:

0 ° = 0.2 3
Two iterations were required to arrive at the following
values of cis for stable equilibrium:
01 s 0.0 =
02 s 0.250 =
03 s 0.233 =
The corresponding starting values of o. for the unstable ~
solutions are:
02 = 1T - 0.2
03 = 1T - 0.2
After two iterations, the o.u's are found to be: ~
olu = 0.0
0 u = 2.592 2
0 u = 2.532 3
These are listed in Table 6-2, and are inserted into the
Runge-Kutta Program of Appendix C as "Stable X" and
11 Unstable X".
110

C ~nt VIN~ FOP THE E0Uil tRRIA OT~~NStnN X(l0),F(l0),Y(l0,10),ANr,(}0,10),E(lQ),X~(lQ),U{lQJ,
tiT F ( 1 t' , 1 C l , ~ (.7 , ;n , " C 2 l , r) E G ( 1 0 J , C ( 1 0 ) ~=7 . N=lt ~l:'l
----· R Fl\!)(! 910~ l (f tJl, X( Jl-, X~(Jl ,UtJ1TJ=1-,-t.t-t------------------------l'n 1(1 1-=l,N nn tr J=l,N
10 Pfl\~(l,lOOl(Y(l,Jl,ANGCt,Jll t:K:::: 5 L1<'=4 Ll(=\4 lK= 7
-----nn 11 ·J=l,N------\I{Jl=O.C' nn 11 K=l,N
11 UfJl=!I(Jl+EfJl*EfK)*Y(J,Kl*COS(X(J)-X(Kl-ANG(J,Kll ----------~J~~t~.~
f) r] 1 ? J = l ' "l 12 WDlT~(~,l00lf(J),XM(J),X(J),U(Jl
nr 1~ t=l,~'-J ----·-· 0n l""-' J=l,N · --------------
13 PfA{)(l,lC~lY(t,J),~Nr,(J,Jl f'n l'>n l''~=l,LI< TTFP=l
----------~~~nt~ic~~~~-,~~rt-------------------------------------------------------------------------5 Xfll=C.r
nn 50 T=?,N F(ll=Ufll
·-----· nn 2n 1< = 1, N - --- --------2C F(ll=FCJl-~lll*E(Kl*Y(I,Kl*COS(X(I)-X(K)-ANG(I,Kll
nn c:;o J=?,N I'F( t,J)=I).O
---------tFfl=-.114~1-n-::-,~r-----------------------------------------------------------
. 10 ("f)t-.'T l f'.!llr nn 3" K = l , "I ll="fK-T Pn9~5,~6
--~~> l)r t l, J l ""'nF t t, J l +E t T) *E( ~ l *Yt"l-,1<. l"*StMtXt·t-r--x-t1<1--ANt'!"G-t-(-t-1~,1t-l(-t-)-t-)-----------------'3':' ("f'!NTPHIF
r.n rn 50 40 {)F(l,Jl=nF(I,Jl-Elll*ElJl*Y(t,Jl*SIN(X(l)-X(Jl-ANG(I,J)) I .r; 11 r n~i?-"!u~---'---------_;_-------.;;__--..;...;....:....;....;....;. _____________________ _
M::~!-1 nn f." T-=1,~
_f'("' ~0 J=l,~
1-' 1-' 1-'

----------K=T+ l ------ -l=J+l A ( T , .JJ =nF ( K, l l
6(1 ~ ( J ) =-F (I<) ----------~~~-~t"~~-.~~~.~K~s~,-------------------------------------------------------------------------------
oFt.=0.c f'n 70 J=l,M
70 DFt=n~l +~{Jl**2 - ------ T J: t c • r c 0 0 s- m= L l ~ o-,~-o;-~
8C TNf"=tr,r.'"l-tTER. T != f l"l F l o '3 , Q c;, R 5
~c; tTrR=!TFR+-1 ------nf)-Qf)- J=h ~----------------------------------------------------------------
T=J+l 90 XC T J='i( T )+R(J)
on 04 J=?,N 7 =occ!. r- ( x c J t *•ll-----------,-------------------------,-.--------t F ( ! ) 91 , 0 l , q4
91 r.n~1 Tl"JIIE yqxc.JJ )o7,o?,o~
-------.:~~2,..___...XL1l=·X(Jt+~r.4+~"""*~------------------------------------r,r Tn q4
0~ "((J):)(( Jl-31.41~9765 ()4 rr~'TT-~J,r
r.o rr' r. QS ~PTT~(~,?01\TTF~
nn q,_, J=l,"' 9A nFr,fJl=fl40.~/3.141~9265l•XCJl
---------\.!.0 l Tl= ( 3, '3()0 t------------------------------------------------------------00 Q7 J=t.~
q7 WPJT~(1,l00)X(J),~EG(J) \1(\\-=C." 0\1 qp J,l,N -----
9j:l llrl J=ff l l*ffJJ*Yfl,J)*COS(X(J)+ANG(l,J) )+Ufl) \.1? l T I= t ~, ~00 PH l l WP{Tt:("l, 9 4('r')()(l
1---------N"~- lr;;':\-l =? fN ·------------------------------------------------------------rt-t.()-=O.C' nn 110 J=?,N
11 ~ f. R Ml = (';P "0 +n F ( I , J ) T I= f r.p ~ n ) 12f', 1 '30, 140- ----------------------------------------------
120 ~PlT~(3,500ll r.n rn 1"0
130 WQTTF(1,~Qn)J I r.n- rn- 150· ---------------------------------------------
140 WPTTFC3,700lT 1 '50 Cl"lNT I NtlF 1-'
1-' N

. lOt FnPM!Tf4~1~.Rl
------,0C FOPM~Tf///~X,•TTERATTO~ = 1 tll0//l~~~~~~--~~--~~~~~~~~~~~~~~~~~~~~-
30C J=nP'1AT(5X,•OflTI\ tN P.AI')tMIS't'3lC, 1 0ELTA IN OEG'/1) 400 FrP~OT(5Y, 'D~l =•,Ft8.qf/) ~00 f~P~AT(5X,•r,Q~OIFNT ~FG~TIVE, t=•,[3J
----1-_f!('-F-f'P""T(s;'l(,-•r.~.-_OfENT-lf.~f),--T-=--t--;-t--~-------------------------------7C~ F~PP~T(~X,•~P\OTE~T POSITIVE, I='ti3J ~OC FnPMAT( IIC:.Y, 1 11 RFF. = 1 Fl2.1-//) qor FPP~hTC///5X,•VOLTAGE•,ltX,•tNFRTtA CO~STANT 1 ,2X,•tNITIAL ANGLE•,
----- -p;v,' INITIAL TUR'\lNE POWER 1 t -----STnP ENO
·-- - -·-----
1-' 1-' w

Vf'ILThr.F l.?t')OQ()0~4 l.3QQQQ<}67
HI F. R T T 1\ C (1 N S T A NT I N t T I ~ l AN G L F. I N I T I h L T II R ~ I N E P 0 W E P 0.05000000 o.o 0.5417~734 0.04000000 0.1qqqqqqq 2.75~7795~
1. ~40QQQ4~ ---- 0.03000000-- 0.}()999999 -----------1.7A3~916q ----- -----
------~t~T~hyfe·H-~----------r--------------------------------------------
Otl.TA TN ~A!HhNS OF.t TA IN OEG
n.~ r.o ~.7402R04~ 14.28~73760
------,:-.--B-T-50-SAA l ~. ~? ft7
lJ Ot:F. = 0.53231R
OEL = O.f'IOCC0217
GR~OlF~T NFGATIVE, I= f.OAOtr~T NFr,ATTVE, T=
TTF.CU\Tlnt-.t = 7
2 3
. -·- -------------------
DELTA IN RADIANS DELTA IN DEG
:).(' ?.5Ci?l0A7~ ~.5~l8A705
o.r. .. ---- -----14P.r;t6R762? 145.0~643677
~~-- -~------=--=-'"'--------------------------
II o.r:F. : -1.408074
... ~ : ~
(;P"'')TF'H Pf)c;JTTVF, T= 2 (,P l\'H PH PnS IT tVF, T= ·:1·------
I-' I-' ~

APPENDIX C
SOLUTION OF THE SWING EQUATION
BY THE RUNGE-KUTTA METHOD
The solution of Equation (5-13) may be done by
numerical methods. First consider eliminating the o r
term. Note the additional term B. (do./dt). Although 1 1
the program was written so that damping power could be
included, in all example cases B. was set to zero. 1
M. 1
For i = r:
U. - P. 1 1
Substituting (C-2) into (C-1):
= u. - p,
1 1
M. 1
i = 1, 2,
B. do. 1 1
- M. dt 1
• • • , n
Defining a. = do./dt and numbering the machines so 1 1
that number one is always reference:
i = 1, 2, 3, ···, n
115
(C-1)
(C-2)
(C-3)
(C-4)

where:
f. (a. ~ ~
= u.
1
M. 1
• •• ) = U. - P.
1 1
M. ~
• • • cS ) ' n
e 1 n B.
- Ml kll ekyik cos(ok + ~ik) - M~ ai
116
(C-5)
(C-6)
E t . (B 4) d (B 5) h t th . th mb qua ~ons - an - eac represen e 1 me er of
sets that contain a total of n equations each. Such
equation sets may be solved by any one of several numerical
methods; the one chosen here is the Runge-Kutta method.
The technique may be found in most books on numerical
analysis; specifically, consult Jennings' [20] book, First
Course in Numerical Methods, page 149.
i.e.,
and
The following notation will be employed:
t = 0 0
tj+l =
o. j = 1
a. 1
j =
f. j = 1
t. + Llt J
0. (t.) 1 J
a. (t.) 1 J
f. (a. j 02 j
03 j . . . , I I
1 1
The initial conditions are known:
0 j) n
0 . 0 fori= 1, 2, 3, ···, n are known. 1
a,. 0 = 0 fori= 1, 2, 3, •••, n. 1

The procedure 1s to calculate four constants for each
variable:
kl' k2' k3' and k4 for each 0
11' 12' 13, and 14 for each a
kli = g. 0 At = a. 0 At .1 1
1 li = f. 0 At .1
Then compute:
k2i (a.o + 1 At = 2 1 li) .1
Next calculate:
13i = fi(aio + ~ 12i' ••• c;jo + ~ k2j' •••) At
Finally compute:
= f, (a. 0 + 1 3 ., •••, 8. 0 + k 3 J., •••) At 1 .1 .1 J
The variables o. and a. are incremented as follows: .1 .1
Therefore:
Ao . .1
A a . .1
6.1 = 6.o + A6. .1 .1 .1
117
(C-7)
(C-8)
(C-9)
(C-10)
(C-11)
(C-12)
(C-13)
(C-14)
(C-15)
(C-16)
(C-17)

118
and
1 0 A a. = a. + ua. 1. 1. 1.
(C-18)
and the entire process is repeated by replacing 6. 0 by 6. 1 1. 1.
and 0 by 1 and recalculating ~6. and f:.a .. a. a. 1. 1. 1. 1.
A computer program which implements this method was
developed. A flow table of this program is presented in
Table C-1. A complete list of the program follows with
data presented for Example II.

No
I Start: . Read in XS, xus, Initial X, Pre-Fault, Faulted, and Post-FaultY matrix - DT, NC, KL, N, M, JC, . Set wR = ws Read in Machine Data .. ~
r'
'( ... ~
Is t = T ? -Set Y matrix to - Compute u. Set Y Matrix Faulted Values - ~ - to Pre-Fault; Write Machine Data
~ .. Set T (1) = 0.0 ~
Yes
I No _ ..
Clear Fault . Calculate DD, DX by Set Y to Post-Fault Value Runge-Kutta Method
I
Is T (I) > M•DT? Write T(I), X(J,I), SF(J) Calculate the Stability Functions
Yes
t [Is KJ ~ KL?I I Set NC = NC + 1~ I Plot Swing Curv~~] • .. No
I Yes I End I ' ~ ----
Table c-1. Flow Table for Runge-Kutta Program I-' I-' 1.0

C r. 4. G-~n SS S I MUL~NON (.IN. OI F. EQUA:---·RUNGE-KUTT A C EX.4MPLE f___ ______ __ _ ______ _
gj~~~~~g~ 6~~(Y~I:~R~l~6~!x~~t~~;~~R~li~J!~~4t~&f!8Kl?t&I!fi~2l~~,, lSr-t 10)
____ 1"1 ~E~Sl 0~ OK3 (1 C),IH 10l 1 XMC\0 l, '\( 10), YA ClOt 10) 1 Yf.\( 10, lOl_; :VC( 10, 10_.._ ___________ _ l.~~GACl~,\O),A~GBClO,lOJ,ANGCllO,lC),XSClO),XUS(lOitWClO ,Z(llO)
N=2 N=4
----~=3 . ---· M:201 1#:)('1 \oiS-=~77.0
________ \o.'t? t TF ( 3, POO) ')n 1r: J=l,N PE~n(l,lOOlXS(J),XUSCJ) WPTTFC3,100lXS(Jl,XUS(J)
--~-QF~D{ l,ton)F(JlJXlJ~llJX~(J) ,8~~~~~~-~~--~~~~~~~~~~--------~ l'T=C.005 OT=O.Cl f)T:('.')2 Kl-=lC '<l=l KL=1 1<l=2 _____ N':=50 ~r=nB Nr=20 "-!(=1'5
________ NC=?P \lr=3r. N~=1q t\'(= <") t-,lt"_: 1 c -----Nf.= 17·-------------------~-----~-~~~~~-~-~--~~----
c Nr:=lR FfltiLT WILL RE CLEAREO AFTER TzNC*OT ~!\.= 'JC + 1 JC= r; JC=l JC=~
_____ Or) 11 _ _I= 1, N_ -----------------------------~------------0') 11 J=l,N 11 RFAOft,lr.OlYACI,Jl,ANGA(t,Jl
nn 17. T=l ,N ('I~ 1 -, J = l , N ~
12 .RFAOC 1, tOO lVf\ C t ,J l, ANGR( t ,J) -·--------------.-----· ------------ --~ . -

00 13 I= 1 ,N f'n 13 J=l,N __ _.1 .... 3.t... R F.A o' 1, 1 r.o 1 vc_LU.JL..A:.uN=G.:.r.t ..... t ..... r.&.., x.Jl....._ ____________________________ - __ nr 333 KJ=t,KL T{ll=O.O 00 14 J=l,N U(Jl=O.IJ -·-·- ----- U l =II ( 1) l'fJl=O.C
------------------------------------------------------· --------- -· ... _. _________ _ ----------·-----. ---on 14 K=l N · ·---
---------YCJ,Kl=YA{J,Kl -----------------------------------------------------------------------------A~G(J,Kl=ANGAfJ,Kl
14 U(Jl=lJ(Jl+FCJl*E(KJ*Y(J,Kl*COS(X(J,lJ-X(K,lJ-ANGCJ,KJ) WP{Tf(3,6110)
--~------ ~PTTf( ":\, lOOHUC JJ ,J:l,N) ----W0=W<\ DWQ=i').O XKl(ll=C'.O
-----'X'< 7 ( 1 ) = c .1 . ----------------------------------------------XK~( 1 )=C.C )(1(4( l )=0.0 fWl(ll=.:.n
- --- f'l( ? ( 1 ) = (). (' nK~( ~ l=~.o ov 4 ( 1 '= o. n WQTTF(3,?00l
. ·--·----------------------------------·
_________ no 5 J=l.~ -----~~~~--~~--~~---------------------------------------w~ITF(3,100lEfJl,X(J,l),XMCJJ,8(J) no c; K=l,N Y(J,Kl=VI)(J,Kl
' --------5 A"Jr.CJ,Kl=ANGRfJ 1K) .. ----------nn 6 J = 1, "l
6 W(Jl=WS WPTTE(1,3Cr.)
~----- nn Rn r:: 1."' -------------------------------------------lFt"lr-I l23, 21,23
~1 r.nNTTNtlr nn 22 J=l,N on 2? K= 1, N Y (.J , !{ ) = YC f ,J , K l
22 ANr.(J,Kl=ANGC(J,Kl 2 3 Cn"-J T I i',!tJE
------------------
----LC=~.!C:+l -------------------------------------------IF(L(:-Tl?6,25,26
25 WPTTf(3 1 400) V=O.O _oo 1'31 J=\.,N
1-' 1\.)
l-o'

-V=V-tJCJl*lXUSCJl-XS(J)) 00 17.1 K=l,N 1F(J-K)111,121,llt
~~~1~1-V~V+F(Jl*~lK)*Y.(J~Kt•StNL~IJ)-XIIS~NG(JrK~~~~~~~~~~~~~~~~~~~~~~ V=V-r(Jl*F(K)*V(J,Kl*Sl~CXS(Jl-XSCKI-ANGCJ,K )
121 r.n~JT I NUE 131 V-=V+(E(.Il**2l*YfJ,Jl*CXUSIJl-XSCJll*COSCANG(J,J))
VMA X=V -- ----------- --- --. -----26 (ONT T ~UE
Oil ?0 J=-l,N ')C'<l ( J l =D L.l l *0 T
-~--V?=nlJl ___ --PCJl=O.n f'('l 15 K=l,N Vl=X(J,tl-X(K,l)
__ -- ___ - 15 ° C J l = P ( J l +E ( J l * F ( K l *COS C Vl-A NG I J, K 1J *Y ( J ,_ K) F = f tl ( J l-P ( J) l /X~ ( J)- ( U ( 1 l -P ( 1 JJ /XM( 1) -B ( J l *V2/X M( J)
7 t' 0 '< 1 ( .J l = f * 0 T
~Q2 (3) ~ t bl J l +0. 5>li0Kli.Jl1.*D --------~V2=ntJl+0.5*n~ttJl ~-------------------------------------------------------------
PCJJ=c.r. l')rJ l~ K=l,N
__ __ __ _ Vl=Xt J, ti-X(K,I l+U.5*XK1 (J)-0.5*XK1 (KL __ -----------------------------· 16 P(Jl=P(Jl+F(Jl*ECKl*COStVl-ANG(J,Kll*Y(J,Kl
f = ( tl ( J ) -P ( J l ) I X M ( J ) - ( U ( 1 ) -P ( 1 ) ) I X M ( 1 ) -R ( J) *V2/X M ( J) 30 OK~( ,J )=F*fH
______ on 4·) J=l,N ____ -------------------------------------------------------------x~<1CJl=(O(Jl+c.~•nK2CJll*OT V2-=DfJl+O.~*OK2(J) P(J)=O.O
-------. U7:~TJ~T}!.~(K,I )+0.5*XK2(Jl-C~5-*XK2CK-,--17 P(Jl=P(J)+~(Jl*E(Kl*COSCVl-~NG(J,Kl)*Y(J,KJ
F = (I I ( J ) - P ( J l ) I X ~ ( J ) - ( U ( U - P ( lJ ) I X "1 C1 ) - B ( J ) *V 2/ X M ( J ) f----'tt' _-"'K 1 ( J ) = F •rn __________________ _
()!) r; 0 J = 1 'I'J XIC4(.1)=(f)(J)+01<.3(J))*OT V?=O(.J)+OK1(J)
_____ P( J)=O.n f)I'J lA K=l,N
18 ~~J~;~(J\~~~~;!J(~~~~~!c~~~1~b(J,K)l*Y(J,KJ 1 __ r=CIJCJ l-PC J 1 J/X~lJJ~tut.lJ=PC.l~~~'l~•~-~B~t~J~J~•~v~z~tx~M~'~J~J~----------~-------~--~~--~
'50 OK'• ( ,J) =f*OT V=O.O I"V=O.O
. ~=0.5C*XM(l)*((WR-WS)**2) tv -------- -------~--......
~-·-- ..... .

rn 130 J=l,N V=V+C.50*X~(Jl*(D(Jl**ZJ V=V-!1 ( J l *('f. ( J, I l-XS( J) l *WS/Wf J) ['(l 1'2("1 K~\,N ___ _
----lF(J-'<l tlO,l20, 11') llC V=V+F(J)*~(Kl*YC(J,Kl*SIN(X(J,IJ-X(K;TJ-ANGC(J,K))*WS/W(J)
v~v-r(Jl*EIY.l*VC(J,Kl*~lN(XS(J)-X~(K -ANGC(J,K) l*WS/WtJ) _120 V=V
-- 1 '3C V-=V + ( F ( J \ * * 2 1 *Y C: ( J, J) * ( XC J, I J- X S ( J J ) •COS ( ANGC ( J, j) ) *W S I W ( Jl n rJ 1 c 1 J = ' , N ~F(Jl=ll(J)*(XUS(JJ-XtJ,IlliXM(J) _S~(Jl=~F(Jl+C.5r:*f!J(Jl**?.J __ -· ___ _
«; F ( J 1 =SF ( J l-U ( l J I X~ ( l l * ( X lJ S ( J)- X ( J, I ) ) ~~(Jl=SF(Jl-(~1 ll*E(Jl*Yf.(l,Jl/XM(lJl*CSIN(X(l,IJ-XUS(JJ-ANGC(l,Jl
ll- S T!'J( X f l ,1 l- X ( J ,I ) - h Nr,C (1 , J 1 ) ) SF ( J l = SF ( J l - ( f ( J 1 * *? ) * Y C ( J , J l * ( 0 S ( A NG C ( J , J J I * ( XU S ( J l- X ( J , I U /_X MJ_J ) ______________ _ on lCl K=l,N lF(J-KllC2,1Gl,l02
lC? Sr(Jl=SF(JJ-~(Jl*~(Kl*YC(J,Kl*CSIN(XUS(JJ-X(K,{I-ANGC(J,K)) -SfN(X ( J, I ) -X ( K , I ) - 1\ N r;c ( J , K ) ) l /X M ( J )
____ _.~F ( J l =SF I J 1 +( E I U "'E I K l *YC ( 1, K l I XM{lTf*COSTXTl-;lf=x ti<-;-fl~NGC ( 1, K) ) l* ( XUC::,( J l-X( J, !l)
1()1 CWHJNtlF nn 1n1 J=2,N
103 ~FfJl=2.C*SF(J) WP!TF(3,20ClT(T ),{)((J,Jl.SF(J).J=?.Nt on 6') J=l,N D X= ( 1 • C' I 6 • 0 ) * ( X K H J l + 2 • 0 *X K2--t_J_l_+ 1--!l.tJ(Jtl-Wl-+XJ<.4L.U-l ----:---nn=(l.OIA.Ol*(0Kl(Jl+2.0*0K2(J)+?.O*OK3(J)+OK4(J)J X(J,T+ll=X(J,Il+OX
1 60 ntJl=O( Jl+~n l _ ~-~----- nwq=(tJ(ll-PIUltOT/X~CU. ·--·-··-----------· I WP=WR.+[)Ir:q . X(l,T+ll=Xt1,Il
{"1{1)=().0 ~--~----SPFEO CONTP.OL-Of-REF--~A~----------------------------------------------------------------
WF-=Wc;-wQ OWE=-OWQ. A'<l=O.l
_ __ _ -· _ ~ _ ~ . A II: 2 = ~ • 1 Al(l=O.O AK2=0.C ntll = h K 1 *WF *OT +A K2*0WE
1----=----U ( 1 l-= U { ll +nUL-·-·-----------------------------------------------------C <\PfFf) (.hlCUU\TTCN
on 7r J-=1 ,N '10 WCJ)=WP+O(Jl
_ __ 80 _T l t + 1 ) = T ( t ) +0 T -.----1--' N __ _ w

c PLOT nF SWTN~ CUPVFS C~Ll P~Nr~s ( 1 GROS~•,5,0) CALL NfWPLT(2.0,4.~,11.0)
----CAL L-CR T G PH Co .0 ,O. 0 )-:--::-:--------..;.....-------------------------r:ALL X~CAI.Et0.0,,.0,8.01 rAtl YSC~tF(-3.15,3.15,5.0) CALL XAXJS( O. 1)
.- . --- - . ----- r: A ll Y A X I S ( 0 • 5 1 ('0 15G J=2,N NP=~
-· -- .... ---------------------------------·
f'n 140 K=l,M trrN~-Kl140,l45,t4~------------~-------------------------------------------------------------
l45 ~~~=ABS(X(J,K)) JF(~.14l6-AG~)l47 9 147 9 146
146 ZIKl=X(J,K) r,n rn 140
147 NO=K 14 0 C 0 'IT I N U F 150 f~ll ~YDLT(T,l,NP,l,-11
______ xn HJ = o. 7 ~ _ __ ----------------------------------------------------------------------------P'!=0.20 no 160 .tN=t,tc CAll NW~(XP.tN,-Q.l';,Q.07,RN,O.O,tl X R 1 N = X~ t N +0 • A 0 .. _ _ _ _________ _
160 P~I=RN+C.?O VP.T~=-2.40 fHj::- ~ • (1
______ f)IJ 1 7 0 J N = 1 ,13--::--:---:---:-:::--:--~~~=--------------------------------------------------------CALL ~U~f-0.35,VRlN,0.07,RN,O.Otll VRTI'J=YntN+<'.3qA
c
17C P~=RN+0.50 CALL SVM(5.0,-0.5,0.14, 1 TtME IN SEC.•,O.O,l2) __ _ CALL SV~f-O.~,-t.O,O.l4, 1 0ELTA IN R~OIANS 1 t90.0tl6) C~l\ ENDPl. T
333- NC=NC+~tr: __ C.M L LSTPl T _ --·-----·----------------------------------
ENn or PLOT lOC FOPM~T(4Ft8.Al 200 ~ORM~T(l3Fq.3)
______ 300 FnR r-AJ\ T ( //5 X,' T' , 1 X, 1 X2 1 , 7X, 1 S2' , 1 X,' X3', 7X, 1 S 3 '-• 7X .__I_X4_•_,_7X, __ 1...S.4~--t---------------------17 X, 1 'lt 5 • , 1 X, ' S 5' , 7 X, ' X6' , 7 X,' S6 • , 7 X, 'X7' , 7 X, t S 7' II I
400 rnoMAT(lX,34HFALLT CLEARFO, FAULTEO LINE OPENED) ~00 e:rHP-1AT(r;X,7HVOl TAGF.,~X,llHJNtTIAL ANGLE,4X,l6HINERTIA CONSTANT,3X,
1 - ... 11 ~ H 0 A~ P 11'1 G C C F F • ) .. . .. . _ _. ____________ -------------------------------------6nO FOQM~T(///~X,'l~lTIAL TURBINE POWFR 1 1 700 ~OQM~T(6X, 1 V~~~; 1 ,Fl7.~l R(j(\ FflR'~I\T(//5X,•STh"LE lt•,7X,•UNSTARLE X•l
STOP nm .. ···--· ---------· ----~--A

STA~LF X UNSTABLE X •1.~ 0.25COCCOO- .. c. 73299998
-· -·~---------
TNITtAt TUQ~lNF. o.c;41?5204
VOLThGF
POWER
o.o 2.59199905--2.5319QQ5q
2.25R77Q53 1.28389168 INITIAL ANGLE INERTIA CONSTANT DAMPING COEF.
1. 7t'JC}99 q :?'• \e100C}OQ~2 1. 3409<)<)4~
- C.O ----- _:_ ___ O. C500COOO-----O•O---------------------O.l9999q9q 0.0400~000 0.0 0.19q99999 0.03000000 0.0
-----. -- ----------T X2 S2 X3 S3 X4 S4 X5 S5 X6 S6
------0.0 --- r. 700 -340.78J ___ Q.2C0-~376.0A8----------0.~?~ 0.207 -140.A~4 0.?05 -376.536 ~.~4~ 0.??7 -~4Q.016 0.??0 -3?7.795 o.n~J o.?~l -34~.Rlt o.?4~ -379.61A
---C.CR~-~- C.10r -34C.172 0.2Al~391.537~~~~~~~~~~~~~~~~~~~~~~~~~~~~-0.ln~ o.~~n _,,~.~?g 0.12A -3~3.147 ~.1?~ 0.440 -~15.114 O.~ao -3R3.AO~ 0.14) 0.5?4 -"l.;>'1.8Q4 0.4'•3 ·-v:~?.t7n 0.16') C.61Q -321.604 .0.515 -177.9q0 ---- --- _______ , C.1P~ 0.72~ -~CC.801 0.5Q6 -370.?11 n.?0J f.R42 -2Q3.nt7 O.AP4 -35~.040 0.??0 0.c~q -?71.4QQ 0.7R0 -340.8?0-
___ 0.?4:) ___ 1.1Y3 -24?.?S2 __ 0.?83_-31B.l01_~~-~~-~~~~~-~~-~-~~~~--~----r.?A1 l.~4A -?lP.22~ n.qo~ -?~ 0 .7C~ G.?P, 1.1Q7 -lA3.~4D 1.110 -?~~.79Q G.lJ~ t.s~~ -144.716 l.?ll -?16.RQ9 1. ~?Q l. 77(1 -10?. 613 1.16?. -173.ql '> ----------------------------------------r.~4~ l.A~l -S8.?74 1.4~A -12R.l41 O.~A~ ?.~6q -1'.11~ l.h4C -R1.237
FfiiH T CtEhPrfJ, FhllLT~f1 tINE OPF.NFO -~~-O.~q~- ?.23?- -R.046~-1.774 _-S0.615--~~~~~~-~~~~~~~~~~~~-~~--~~-
0 • 4 0 ~ 2 • 3 5 q -A • n c; 1 • ~ p A -4 4. ? 2 c; --0.4'n ?.4S4 -4.A?R t.on) _,4.0S6 0.441 ?.~lR -~.P?l ?.0~1 -27.Q63
____ C.46J~_2.~55_-3.466~_2.l24--24.92Q----~----~-----~---~---~----~ 0.4Q1 ?.~~5 -1.~05 2.172 -24.15~ ~.~00 ?.~51 -l.lR1 ?.2C~ -25.0Ql 0.~?1 ?.512 -3.0~l 2.224 -27.40~ c • 54~ 2 • 4 4 ~ - l • 0 r; Cl - . 2 • 2 2 6 . - 1 0 • 9 91 . ---- - . .. -. 1-'
tv Ul

0.~61 2.~60 -3.48R ?.207 -lS.9~5 O.~AO 2.'-46 -4.Ql7 2.167 -42.728 ~.600 2.106 -P..lq5 2.1CO -~1.713 ______ Q.62D---l.937.--~l4.413 ____ 2.0C3 __ -63.409 ____________________________________________________ ___ 0.641 1.11q -?4.711 1.A7? -77.A87 n.6~0 1.510 -~q.~l7 1.704 -94.,01 o.~~c 1.2s' -~Q.257 1.496 -109.651
·--- f'.7')~ C·.96~ -80.3q5 _ 1.247 -119.377---------------------------0.72} o.~62 -q7.~41 o.9Al -ll7.r45 o.740 r.343 -104.4~2 o.~44 -97.744 0.7A) 0.024 -Q4.0RA 0.307 -~8.742 ______ Q.7~0 ___ -0.292 __ -65.120.__:0.036 ___ -6.36Q ______________________________________________________ __ O.PQO -0.~~4 -23.0~3 -G.l72 50.~34 o.q,~ -o.~o~ 23.704 -0.684 102.~11 O.A41 -1.012 66.47? -O.QA2 142.S74
------· ('. 0 6') ·- -1.16A. 9(').f374 __ -l.1of:l. p,fl.724 __________ _ ·----------------------------------------o.~qn -1.?71 122. 0 r1 -1.179 lq5.14~ c.a~~ -1.327 136.95R -1.5n~ lq?.12S (.9?~ -1.314 14~.qq4 -1.579 1~3.139
___ ('. Q 4 ':' -- 1. ? , 4 - 14 '5. 1 2 6 --- 1. 5° 1 _l q 8. ') 3 ~ -----------------------------------c.q~~ -l.20A t1Q.o41 -1.'>47 179.312 n.oq~ -l.C77 1~6.461 -1.43~ 162.A~1 t.r~o -r. 0 05 101.104 -1.261 137.634 t.r?~ -~.tq4 61.~7~ ·- -1.,~n 10~. V)i! -------------------·-------------------1.04, -0.449 12.P?l -n.747 6?.241 1.r~, -~.l7Q -44.~~' -C.4?0 1Q.799 1.0q~ r.1~q -oR.R6~ -o.r~1 -1~.~?4
·--- ! • 101 __ n • 4 00 _:-1 37.4 2 Fl _ 0 • ::-1 2_-MI. 442--------------------------..--1.1?0 ~.~q5 -~~~.836 0.6R~ -4q.706 1.140 ~.o~1 -14Q.GR~ 1.0.~5 -4~.A6Q 1.1~1 1.1q7 -l10.C67 1.350 -~6.355 1 • ! p .) 1 • 4 14 - H' 5 • 1 "- c --- 1 • fA 5 - ' 1. R? 6 -----------------·----1.~0~ 1.~1~ -r0.6A7. l.~oo -17.~14 1.?21 1.76~ -60.154 2.~0') -4.0~Q 1.?41 }.P.OQ -44.~76 2.?5Q 1.426
___ l • 2 6 t) -- 2. (' 11 - -31. Q4? -- (!. 3 ~,- 4. 41 ~ -----------------------------1.7~0 z.tJ1 -77.11' 2.47A 5.o70 1.110 ?.177 -?~.?60 ?.53A ~.qta 1.1?n ?.?14 -?l.~~q ?.5AR 5.7~6 1.341) ?.?75 -?.1.501 -- 7.'510 c;.44q -···--------------------1.361 7.1~0 -z?.AO~ ?.544 5.1~0 1.3QO 2.31Q -24.7'1~ 7.4o3 5.111
~ 1.4r0 2.?QQ -21.105 ?.415 5.191 ___ 1. 4 2·) _ 2. 21r __ - ~?.. r :q __ ?.. 11? __ 4. 1? 6----------------------------
1.441 2.?11 -17.706 2.1R? l.~C) l.4A1 ?.11~ -45.124 2.C25 -1.711 1.4~~ 2.~2~ -~4.410 l.A40 -11.~~1 1.5~1 }.Pq') -A5.173 1.6?f -10.155
f-.' N ~--

1.526 1.705 -75.q44 1.3R5 -53.571 1.~4n 1.4~6 -A1.A48 1.116 -91.177 1.s~n 1.?29 -n4.657 o.A26 -115.063
__ -.~.1 • '5 q J __ C • ? V' __ -7'3 • R ~ 1 0 ._ 5 19---=.141 • .9) 9--------...--::--------:----------"""""'-=~ 1.600 r.Al5 -4B.942 0.201 -154.157 • l.A2~ C.?76 -11.179 -0.099 -144.577 1.640 -0.0~7 ~3.~50 -0.3~5 -117.007
------l.A6J----0.399 __ . 7A.542---~0.642~~67.990--------------------------------------------------1.6RQ -0.707 116.440 -0.859 -8.56~ 1.7~0 -~.077 144.778 -1.030 41.131 1.72~ -1.?13 l6l.07A -1.1~1 ~0.109 !.740 _,.377 171.3?6 -----1.??9 _lJ7.719 ____________________________ _ 1.7~0 -1.496 l74.4PO -l.?5R 124.6P9 1.780 -1.557 172.977 -1.243 13?..9?9 l.A00 -1.558 167.~33 -l.lRS 133.QR2
---1 • ~ :>() --1 •'+9<1 - 1 '> 7. 1 2 C --1. r.A 7-12'te 112--------------------------------1.040 -1.379 141.404 -0.951 10~.46~ 1.8~1 -l.lQ9 119.475 -0.779 6~.067 1.~R~ -0.9~2 91.7?2 -0.~76 l6.35Q 1.00') -0.674 60.32'1 ·-·~ -0.346. -48.9<;6 ----------1.070 -0.145 20.?25 -0.096 -119.100 1.94) n.Cl2 3.015 0.164 -lq~.57R l.o~n 0.~81 -14.~61 0.4?6 -710.031
~---l.qR) -~--0.745-~23.501~- 0.678~231.30b~~~~~~~~~~~~~~~~~~~~~~~~-~~ 7.0oJ 1.cqo -?4.~13 o.q14 -217.348
-------·--·-·"·· ---
..... 1\.)
-...I

INITl}L__ll!3.Blt1[ "CWfP ------~~).~4l75~7c~.~--~~~l-.~z~~~o~7~F~z~c~·o~------~r.-2~_=~~3A'J4~~.~--------------------------------------------------
vnLTAG~ INITIAL ~~~LE IN~PTIA CONSThNT DAMPING COEF. l.1r:CGCCCC ~~.(,j.JC.i)CJJO O.G50GG(,CJ0 tJeCCOOJCO.)
. ___ l .... gqqo o~·..: _____ _ _ ___ -~ • L9t:ll)<)CJoc _______ o. Q'tJc:~;oQ n c. oo oc0 coo ______ _ l.l~C0CCQC J,tngqcgqo ~.03tCCUC0 U.OCUUOOOO
I X? 52 X3 S3 X4 54 X5 $5 X6 56 )
o.r~~ c.zJr -~40.7~~ J.zco -376.037 ___ c. c ~ J _____ c. z J 7 _-:'+c. P., "---·~. ~" 5 __ -:-·:n r,. "1 "' ____________________ _ 0,[.4,1 ~~.7?7 -3'tL',Cl1) 0,72•J -~77,7q') 0.~6] C.'~l -34(,Ql2 ~.?4S -l7l),6lS o.cs1 c.~1c -34~.17, Q.21l -~~l.5R~
-----.~',...._,_h - r <. AP - 1 'q, ~ ~~' •:, ~? h -1 ,~J_J!t 7 G. l ~! ) G. 1t 1ti - ") 1 ':-. '=< 1 ~ ~ • 'P : -1 :n. h 0--;.~--------------------------------~.14) L.5?4 -3? 0 .~q4 0.443 -~~7.l7J C,\hJ r.~lc -1?1.~~~ J.51') -177,qq)
____ C.l ~, ____ ·~. 7~t, .:--3,-,'4, r.rtt __ :j, '1"?A .. -:-l7:,, (ll _____________________________ _ t.. , ? , , .~, '- • 'i t+ 2 - .? Y l • c, 1 7 C· • f, P 4 - 3 5 S • C !t 1 c • 2 r1 c, • ') s o - ? 1 "1_, • ~ , : '· .: •• 1 o. ~- - 3 4 :\ • ~ ? 1 C,~t+') l,lJ3 -24P,2°3 ~.Rq~ -llfl,lC.l Q,?h~ 1.2~6 -21P.?Z4 ~,gq~ -~~n.7Qq U t 2 ~i :) l t '3 g 7 - 1 f\ 3 t IC 4 1 1 t l l C -? 'j ') t ~ (' J 0.'00 t.S5c:; -144.7~7 1.73~ -?l~.QOJ 0 • 1 'UI 1 • 7 2 0 - Fl 2 • (, l 5 1 • 3 t, 2 -1 71 • q 1 )j
___ c. '34 ':' ____ 1. P.lL_=5 R.? l'? ___ l. 49B-=l, q ,J 4 "c-------------------------------G.1AJ ?,0S~ -11.12( 1,640 -0.1,239 0,,A1 2.?S3 31.15S 1.780 -1S,l9l
FMILT CLEARF!J, f-AIJLTr-f' I INF rJPtN!O r.!tSQ __ 2.'i~4 3't.l62 t.n~? -15.YJ9 C.42) 7.~A4 3~.~12 ?,fSA -1.?7~ 0,44) 2.~76 34,C6G 2.171 7.631 0,460 2.7G4 3',4S4 2.771 l2,Q41
~ .0.4q0~-~-2,0.32_~l.(G0 __ J.~A7 __ l~.7R~~-----------------------------I 0, 5 ')'I ? • ~ ~ 7 2 0. • ~~ "i I) 7 , 4 ') ') 1 7, .) ·J 7
0,521 ?.01~ 24.~42 ?.54G 17,?61 Q,S41 2,G42 7S.~~7 ?.b?~ 17.)47
.---__.,."_.__sr,:- 2,0')1 lF--.'31 2.7Cl 16,f.7'J Q,5R1 ?.G~5 1?.223 7,7f~ 16,341 o.t,-:1 ?.(')ss 1,'\l'• ?,'157 1S.1?~ r.~?J 2.(')~0 3.?~ 0 2.034 1~.011 C.64J_ 2,97C __ -l.Ll7 ___ ~.GlQ_l5,44Q ____________________________ _ c • 6 6.) ? I g 7 4 - 5 • (, l't 3. 'J A 6 1 5. 52 Fl 0.6~0 2,CRl -10.177 3.162 14,439 0.100 ~.00C -l4.Pgl 1,239 12.1R3 1-'
1\J (X)

-----~· ._7 ,., r, 1_.!::. ) r - 1 ~~ Q ) () '1. ._21 7 g • 121 C.741 1.~h'- -~~.4'7 J.~~y 1.45~~~------------~-------------~--~~
0 • 7 t., I l • l 2 ? - l l • ..., 1 1 -~ • 4 (' 4 - Q • ~ S f.., C.7q) 3.l<l7 -1n.221 ..3.57~ -24.117 C 0 ~' • I ~ 0 ;:HJ !:i - 4 <; 0 r ) ~ ___ "3 • •, '<? -4 f, • ~~ ·_-;t) C.'~?C- ,.4?·- -f,r~.~'l? -"3. 1':", -7~-o.sqJ ---------------------C.P-4:., '3.5r" -75.7'-t'l 3.11.7 -11P.Z4A (.Qt.,~ 3.77S -n~.~-.~1 ~.10~ -173.~13 C.AR~ 4.L1S -12~.757 4.? 0 ~ -742.411
---r•·~CJ_..,·· ~ ~L-::..l.') ,- • I• -~ Q ft • 'i.., 5 -3.., 2 •' 0.'121 '•·"'"1 -1Q:.P7il 4.:J.;,l - 1w4.2~ll ('.04) s.r;? -?r1.?17 ').124 -4':-J4 •. ~2!-J C.G(J'J ').';r~'4 -{27.f-:~7 '1.4C~It -4hCJ.hC7
_____ L:. <:? q .J ____ 5 • r, (17 ....= 1 t: 2. 'J 3 L ___ 5. ":. 5 ~3 'J 2. J 4 2 __ _ _________ _ 1 • (.; :: ) ,, • ') l ? - 7 7 • f, .? 'I h • 3 4 "1 -? "3 J • ' 'i !t
l.C.?J 7.-~27 4C.27f, -':J.Fitl -~SJ,ll 1 • C 4 ~ ' • "· 2 ; • l r, ( • 1 '• 4 7 • ? ? -l 1 A ') • 2 7 5
~~~~-L6" J.a~r 11 £o..,l5 7.~~P 27~J~'"'~~------------------------~-----~ 1 • i u .I o, o '~ 1 ,2 2 q 7 • l ) t, K • '- 4 l 3 :'- :~ • 1 :: 7 1.L-, A.7Q 0 ;~(-'.J.r:.,'--. 7 r.4ll ?41).54A l • 1 ? l 'i • l 4 ~ 1 (") 6 • l l, '· p • 7 1-, 5 l ? r; • ? 1 '5 lo 1 !t .- ----- '] • ltl4- - 75 o ~ C Lt ~- '? • ll't __ - ~ j • :-3l.J l • 11) -, q • p 1+ c - ~ r. 0 ( K p q • It 7 7 -2 l (1 • C) ? 2 1.lq~ l(.o?:l -?Qn.PA7 a.S5') -472.56~ l • 2 ·; ') 1 L o ') 'l} - ~ r q o J 1 'l 1 =· o ? 7 7 -I; l 1 • ')It?
~~-~~22' 1]~' 1 -7u~.5Q4 11.751 -74~~~~{~--------~~~---------------~--~~-1.24~ 11.400 -PG7.1~7 ll.?r4 -7~2.llJ
l.?P0 J?.57j -4~~.l~') l?.4CQ -?31.977 _______ 1 • 3: :L ___ 13. 1 3 2 . - b 3 • -:;_ 2 ° __ 13 • 13 c ... 2 2 ':l. 51 oJ __ ~~~~~~~~--~--~~~~~~~~~--~~-~~---~
l.2h':· 12.: tn -rl?. nn ll. 0 72 -t:;"2.125
1 • 3? ! 1 3 • f, :q ?. 7C: • ~ ? '- 1 3 • 7 f- 7 h ? 5 • '5 G 'l 1 • 3 4 : l 4 • 7 ~· '• L, 1 ( • ; •.: l !. 1t • -~ r_, 1 p 1 ) • 8 7 l
' 1 • 16 '! l 1t • ,'--. "l p 3 2 1 • q l ; l'~ • () l p 7 ·~ q • l 1 q ~~~-.... ...3~' 1 5--l.F '-2 o 7C'2 J 5. !t.~'t-:;5-~5c:'*~~~~--------------~-~-----~------~-~-
1.4u: 15.'--.~Q -3lG.'?'J 15.0')7 129.~~) l • t.. 2 I 1 f:- • 1 ? 1 - 7 ·} ~ .f 1 7 l f_) • 4 7 1t - 4 1 7 • ') 91 1.4t+) lf,.','+2-l\l2.F,':J'' 17.:14-l-1.:.4.177 la 4 6 J _ 1 7 a 2 1 ')- ll •.:. C• o 3 21 __ .l 7 o r; O l_- 14 '?_Ito 6 g 5. l.4qr 17.~4° -P04.7f-2 l~.ZLR-1475.111 1. 5" -, l R • ') 31 - ·q R • J "> l 1 S. F '"; )- 1 ~ _: q • S c; I) 1.G~) ]G.24? ?~4.?1~ 11.~:4 -1~4.f97
~~~~.._a5..4."' 1 c • ..<::0 ~· 12 a.. r q t ~~-;-1 ~-3~5'---;6~?:--,l;;----~~?-------~~-~--~-~-~-----------~--l."~.~) ?~~.fd4 Pf."-.. 0 7'_ ?.~.7l( 114o.~g':i 1 • I) '3 ; ? l • 2 Q 9 6 4 Q • '• 4 ? ?_ 1 • / 0 r: 6 7 J • 4 1 ,) l.fJ~ 21.'l2S 164.222 21.~10 -3~.A12 1.62; 22. 56 1i -412.23.5 ___ 22....3~4:-_l_Q3_L_4_72 __ ~--
I-' N \0

l.n4) 23.ZV:-1107.n•)f- ?;>.G5J-l'"P3.14~ l.~A0 ?3.G~7-151A.00S ?1.57,-204R.61J 1.6~~ ?4.5R&-l41C.367 24.2&h-14~4.S9~
__ --~,...Jij ,-, 2 I; o It 59 - 7 5 } o R !') 6 2 5 o I' I 3 - J ] 8 o 2 4 9 1.7?1 26.?2~ 21~.21~ 2~.7~1 10?~.915 1.74~ ?6.9~~ pqq.l42 76.~1? 1417.076 1 • 1 h •l 7 7. ~ t) 7 Q 'I c. 4 "l, l 2 7. ? 4 l 1 ~) ~". c 3 2
------1 • 7 8 ·) -- ? 8 • 3 2 7 - 2 u 4 • 2 8 2_2 1. 9 56- - - 7. 2 0::, -----------1.8~1 2A,OJ7 -P~5.12l 2R.hel-l?A5,773 1.821 29.6~5-lP97.7~5 2°.44'-2l7G.OA9 l.R4.j 3('.4'3P-2H1 C.l 1~':> 3C.?'J8-217C.lAl 1. f>f,:j __ 3l~2/L..,_l__3.lS. 361-., __ ~ 1. 1? l)_...__lQ·.+It. 3._33 l.RW~ ~~2.G2"3 6Z.rl!fl 37.nJ5 6A6.F,R9 1.9~J 3?.81? lC4l.395 ~?.Hq2 18qC.24R 1.92~ "l,1."71 R~~.f44 33.7~4 l"l4.5CJ
--- -- -- 1. 94 J- -- ? 4. 31 u -.? lC • 2 6 5 __ __3 4. 5 47 __ 7') 7 ._6 3!--------------------------------1 • ':) h 0 V>. c; "lit- l 7 'l, P • r ) A 3 5. 1 I) R- 1 LJ (). 1 3 3
- -t .9 R u '3?. P. v)-? '1 :> q. 11.: A--- 3 6 .-1 c '?- u) ~.,. 3 A q ----z.c~0 "l,6.675-7(04.5R7 37.071-29JO.l2S
Qtl.IECT r.noE- 12~~~4 BYTES.APRAY AREt.- 15360 BYJES,lJ~USED= 22336 BYTES
,_. w 0

WITH SPEED CONTROL
/r'!ATA
~T~Rlf ~ UN~TAALF ~ ----- - 'J. c r;ccc N)O-- ·· · ------o. -ccnociJCiO
c.?~rcc~oc ?.~q?ococo 0.2179onqr; ?.53lqoqr,o
J~ITTAL TUPqTN~ PnWER ~.~417SS7~ ?.2SR78?00 1.2A1Aq40Q
---- --Vf'L Tt-,r.~ - TN ITt AL ANGL~ IR~lfTTk- C:nN-ST~'J"T----oA1-TPTif\.-COfF. - --------------- ·-· ·- -----------
T
t. ~c·rr.c '!80 1. -,ooggo')(' t.~5CC'CCC'0
X? S?
c,. 0~0 r:c 000 o.lqgqqqqc O.lCJQ~OCJQO
X ":I
O.OSOOOC00 O.OOUOOOOO n.0400GOOO 0.0COOGOOO 0.C3000000 C.OOOCOOOO
53 X4 S4 X5
C.001 C.22G -340.7R3 O.?OC -376.0~7 C.C?0 C.?~7 -34~.450 0.?05 -l7A.160 r.04~ G.2?7 -~4C.142 O.??C -~77.040
S5 X6 S6
------~~5~ 1.261-=~3~50? 0~~6 -37~~~0·---------------------------------------------------------------c.rqo G.~1P -33R.46~ C.2Rl -37~.o1z 0.10~ C.36q -33f.?10 0.3?6 -~P~.ors 0.t~J 0.441 -~32.,~1 o.~Rt -~RJ.6"6
~~~0.140 ____ C.525.-3~6.142_~0•445.~37P.471_~~------~--------~----------~-~--------~ c.1~0 c.&72 -~16.czp 0.51R -37~.~~1 ~ • l 0.1 (' • 71·') - 3 L 4 • (14 l 0 • ~ 0 q - 3 f., It • 4 4 h n.?"1 C.P4~ -286.PR? J.AGC -~~~.q?q
----'-i-11.22" (,._<]7.6-=2.64 •. ~1~- ,, 11~332 ... l.C.~--------------------------------------C.i'4" 1.114 -2"),~.r":\? O.R 0 4 -1!)7,47() 0.2AO 1.261 -?C~.9Ql t.nCR -?7~.860 0.2Qn l.LlA -}/..C.(7h 1.17~ -?40.401 _______ o.~r:a _____ t.579_:-J27.823 ____ .1.257. -ts8.674_ ______ _
I-' w I-'

~.12~ 1.751 _q3.117 1.393 -152.~8, r.~4" 1.930 -36.20.9 1.5~7 -1o~.Q12
FA!Jl T Ct FARI:n, F~lll TFr'l lINE OP'=~IEO __ _.....a. ~6" -2 .. c._95---2.9 .. 02t __ l ... .61~3L-..;:-~7~7~·~2..L.r.~--------------------------------
r.3q~ ?.??~ -?~.Rqq 1.7AA -~7.14A C.40~ 2.1'1 -20.?Ph l.Bq4 -4?.q24 0.420 ?.~Ql -17.q16 1.~6, -33.4?.,
-~~--~.440-~--2.433 -~16.C98 __ ~_2.C31~-27.5e3~~~~~~~~~~~~~~~~~~~~~~~~~-C.4~~ 2.4,1 -14.79~ 2.~~5 -?4.40Q 0.4~r, 7.447 -11.~~1 ?.l2A -?1.417 o.~o: ?.47' -1?.502 ?.t~~ -~4.oto
---..C .• 5.20 2. 318 -1 L.5 3.~ 2 .l 7.3--=.2.5..25-::---------------------------------C.S40 2.316 -1r.~4P 7.177 -~q.52~ ~-~~0 ?.'1~ -~.Q31 ?.165 -3?.7~6 o.~qc_ ?.117 -q.7tA ?.ll~ -~A.Q71
____ c.6·J~.-~ 2. cr> __ _.~ 1c. 6c:'1. ___ 2. OP7 _-42. 757 __________________ _ G.A20 ' l.q~o -1~.~~5 ?.fl7 -4q.~7, r.~4n 1.111 -1R.~~3 1."72 -~7.~3q Q.A~J 1.5~Q -2~.3?4 l.RCO -~h.?~9 G.~? 2._ __ 1 • ...3 ~5--=-.31 .. 3 3 ~- 1...h'5 L-=-1A .•. ~1-~-------------------------------0.7r1 t.lR~ -~c.ar~ 1.471 -ql.~C3 0.7?1 r.~7~ -6~.~o~ l.?~P - 0 4."47 C.~4n n.7sn -7P.5l~ l.ClO -~l.?P~
--- -- .0.76~---· t.539 ___ q~.~~8. __ c.~o, __ -7~.~~~~--~~~~-~~~~~~~-~---~~~--~-~--~~ 0.7~) 0.~?7 -Rr.~rq r..~?5 -~?.~G4 0.~0~ r.1~n -?l.C47 ~.?77 -4~.~70 r.P'0 -0.~~~ -~7.~0R C.C~G -2~.71~
____ n.~4') -n.__~_:~L_-_st.2.4!1 __ -~ • .lf2~--l1.2~t~------------------------------~ ~.Q~~ -0.11Q -~A.?7C -0.1q1 -11.14~ 0.~~0 -(.401 -?~.~lA -0.54~ -l2.7L~ c.o~1 -0.44A -?~.7r7 -C.~56 -?l.~~A
·----~- ~.o2J ~-C.454 -?o.~84 --~8.715 __ -37.972_~~~~-~~~~~~~~-~~-~~~~---~--~~ ~ r • "4 rl -,.. • 4 7 h - 4 ~ • "7 q q - 0 • 7 7 1 - ~ q • c; ? a------1 ---- ----r • () ~ 0 -- - () • ~ t.. '· - ,... ,.. • 1 f) 1 -- - r • A 1 ll - ·1 'J • n c:; 2
G.qqa -0.771 -q5.~~6 -o.5A6 -lt2.R'' l.C~1 -0.157 -13C.Cbl -0.4~~ -14t.~ll
---~·· ':'_, 1 -:.~_: 2 ::--=:..1 ~c.~~ 1 ~---~._212._::_1_'-'_~ .. -~f-, 77 ______________________________ _ 1.040 0.11~ -20l.l~R -0.067 -lqR.7J~ 1.0~0 G.?~Q -?~o.~qq 0.15R -2n4.q?7 l.0R0 0.44q -?4"7.oho O.~r.2 -?14.7C4 1.101 c.f.'? ·-?c;r-.• r;rc; C.'-'71 -nn.(·QR
--- 1. 1 ?') ---- (;. 7 4 7 . -7 'i 7. a 7 7 ----- r. (l/+ 7 --? 1 7. p? 11~~-~-~-~~-~~-----1.140 (.P7P -?42.~6A 1.040 -?1~.7~4 1.161 0.qq4 -??P.A3~ 1.211 -2J7.qnq
_______ l .. LA..·J 1. UL. -111. 2.~1 1._3.5.L.::2:U.. 4 72 -----·
I-' w 1\J

--1;:"'0 l.l7C -}aq.145 1.4h0 -1q5.1~ 1.?20 1.?1C -1~7.~44 1.513 -l~q.474 1.240 1.211 -11q.sc~ 1.~11 -tq4.4A~
___ l. ?~1 ____ 1. ?q4_-l74._t'll R ___ l._574 _ _::l ~n._?'lq'----------------· t.zqc 1.71e -17~.~~a !.~45 -176.066 1.3J~ 1.2~4 -175.?h0 l.4P4 -174.~70 1.3~0 1.7~1 -17P.aG7 1.~ 0 ? -173.??7
~~~~.~~'-~~??~~1?~.~~7~_1,_~l~lJ~~f~7~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~-1.3~) 1.1~~ -1P7.q~? 1.1~1 -174.1h3 1.1q0 l.r4? -100.~40 o.n~q -176.441 1.4~1 (.01~ -lR~.~~q 0.7o~ -17Q.~l? 1.42J G.Ata -lP4.aca 0.61~ -1q~.1?4
---~. 44" o. 6 '}f)-~ 1.1 t-. f)()a--c,. 41 ~--=t i:\A.-?,., r-~~~~~~~------------------------1.~~, 0.551 -1~1.052 C.250 -tqq.317 1.4~1 J.411 -150.~~4 o.G~A -tRn.A34
-~~-~~- t; (\ ') ('\ _._2 7 6.-=..1_3 ?-_._'i2 C - ') ---~ ~ 2 - 1._3] Ll9 .?::--~~~~~~--~~-~---~~~~~~~~~~~~~~--1.520 r.t~~ -11q.c17 -0.164 -l~5.h57 1.54~ G.C?O -12f.~7h -0.?44 -1~~.?77 l.~A~ -r.~7l -1'"•4~P -0.20f" -1Rl.hR3
_ 1.'1 Q }_-~,.'. 1 c;r _ -} "l_q ·'' ~4~--~• 1n:> __ -:J q 1. pr::'-------------------------------l.~n' -r.?~4 -l~?.Ac;q -0.?7q -l 0 4.7A) 1.";:>(' -".2~1 -171.?"0 -').??6 -lc;!l.QQ7 1 • ~ '• " -' • ., 11 - l 1 2 • 1 7 5 - 0 • l 4 1 - ? :., C· • h 1 1-.
____ 1 •. 6~_"\ _r ·-~~ 2..__-::.:? l "l '2 t;, -o~-0~~~1.3..~-~~~~~~~-~~--~----~-~-~~---~~~~~--l.A"~ -~.147 -?1?.a~l 0.C71 - 7 3J.1J' 1.7~~ -(.("1 -?40.47A O.lq7 -~~q.l7l l • 7 2 •) (). (' 1? -? 11 1 • 7 41 0. 1 7 5 -?.A 7. ?. r; 1 1.741 J.l49 -?~~.6?CJ 0.4'i(' -?q5.10A t.7A~--~ r.?7f-l--?7?.~7~--~-~.~67~1QJ. ~,,~---------~-~------------------~ 1.1qo r.40a -?7?.Qt~ 0.~"q -311.6~1 1.n~1 r.5~3 -?7G.674 0.75'i -118.416
---~·~_,] ·-'_._6_11_:-_?~7. • .15.1 ,_,..?_2._1._::_3_?-c .• _~ot.,:--~~-~-----~-~~----~~~~~~~~--~~-l.a4:; C.7Cl.n -2A~. ?G1 0. P-~6 -·:q 0 • 7C:.,1 l.oAf) 0.0111 -?c;a.47a ~.Qal -·n3.CJQ<.J l.AQ1 C.Q7f, -?~~.9?7 O.ea~ -l~7.?P4 1.000 1.04( -?~2.A0(' C.RQ1 -l~~.l'i1
-~---~1.~?~~-l.f1C--?4~.l~!j·~-~.P~4~?n~.7~1---------------~----------------
1.o41 l.C16 -?45.0l3 O.Pll -?RR.~3~ 1.~60 1.~~7 -?47.171 0.7r;7 -~RA.l67 ..1.oqn L .. ~'i1 -?lA._('·rz '1.6ar; _,nr;.cnq
---~?.Ci(j n.·-cfq'\--=-:r:n.4b4 o·~6-;')~-=.-~7 ....... ....,;--r-----------------------------
..... w w

·-·-·--p.JfT rAL-IHD n, t NF- PO\JFR ----- .. , . - --------·----- ---------- ----- - _ .. --~-·---·--
0.~~17~570 2.?5A7A200 1.~AlAQ400 VOLTaGE tNtTlAL A~~LF TNERTtA CnNSTA~T DAMPING COEF.
t.~c~noooo o.0oooo000 o.osocoooo o.ooooooco 1. 3009091)0 o .1 sQoqqqo o. Q4arca?a a .r"waoooa 1.~5cccroo c.1~9999QG o.o,occooo o.~oooaooo
___ r_ ____ Xl ____ ___s2_ _____ '0 ____ ___5_3 X4 54 XS 55 X.6 56
o.oo1 o.~~o -34C.7A3 c.2co -~1~.oe1 ------~n •• ~o.?~ c,~2a~4~~5~9~---o~·~?_n~~~~-~3~7~6·-~l~S~9~--------------------------------------------------------------
~.~40 0.227 -~40.142 ~.?70 -177.040 C.C61) 0.261 -3~0.~QP 0.246 -~7R.430 o.r~~ 1.30~ -~3A.460 o.~~~ -370.91~
______ c .1 ~·0 __ 0. 36° ~ 3 3 6. 2 39 ___ Q. 32 6 _:-3 8C. 9C5-------------------------------C.l2~ 0.4~1 -~3?.,~1 0.1Pl -1,C.AQA 0.141 ~.~?~ -~?A.l47 C.445 -37~.471 r.1~r "·~~~ -11~.Q'~ o.~lq -37~.~51
---~. lE J i' • 1..3 C. ... .::2 .:.;'t_. c 4 1 ~. 5 ~ ~-=..3 1.: 't.a !t. (t~------------------------------r.?~) J."4° -2Q~.~G? ).6c~ -3~~.n7~ ~.??J C.q1~ -?~4.07~ }.7RR -11'.1~3 n.?4) 1.114 -?, 0 .~1? C.qq4 -~J7.47q _____ c.~e~ __ 1.2~1 _-2')'3. 0 ':'l _____ l.C··='" -?1~.?-t-111 0.?A~ 1.41~ -l~o.~7A 1.1'q -?~1.40~ n.~0~ 1.~7q -}?7.a?~ 1.?~7 -1~ 0 .~74 r.3.,) 1.7t;l -R~.ll7 1.311 -152.685
----!::..3 4~ ---1 • '? .3·:L--=2 6. 2 (! r:l ___ l. 53 7-=-lC..l.-~~"-----------------------------------~.~~~ 2.11H 11.?6~ t.6P3 -54.30?
t=\~JlT r.LFI\Pf'"', f".\llt.Tr.n l.lNE ,.,PPJEI) n.~~r 7.?~7 lA.777 1.~14 -?q.0ol
------- C.40} 2.41~ 19.~24 ____ 1.~~2--~1C.~8l~~-------~~----~~-~~---~--~~-----n.4?~ ?.~4~ ?,.1~1 ?.0 7 ~ t.5P~ C.44~ 2.~4C ?C.GAP ?.17q a.6Q1 n.4~~ ?.71' 10.~0A 2.274 14.~?4
____ .!l .. !i..£1" 2 .. 1~1____17.6.1'1 __ ..2.._3_(,~ 17.....3 . ..1~------------------------------------o.~oo ?.Q)n 14.~14 ~.451 IR.~47 c.~?" ?..841 11.~ 0 4 ?.~3~ 1~.11~ 0.54" ?.P~7 P.nl~ ?.A?7 1R.~7l
______ 0.560 ____ ?. 81(' ____ 3.?~~---- 2. 715 ___ l7.51JS ____________ , ____ _
o.~,, ?.c~o -11.~~4 ~.Of4 11.411
·Lo.~Rc" 2.01? -c.A 0 7 ~.R()7 ll•.tqr.; I 0.60J 7.Q,7 -~.P?P ?.GC3 14.2P1
C...6{t" .3 .. ~·:'2.--=~!1..32" 3 • .1.1.3 __ _6.._9_f~'-----------------------------------,_. w ol:=o

O.A60 ,.r~4 -?6.191 3.2~0 0.09~ C.ARa 3.1~6 -15.6~~ ~.~5a -1C.~?1 0.700 ~.?1? -47.27q 3.?01 -?~.647
_____ 0. "720 __ . 3. 35(,. _-')l,l:~A ____ 3. 665 ___ ~50. ~?.3 _________ _ ".740 ~.~14 -~".4'' ~.q~1 -q~.3~1 C.7~J ).714 -l~r.7~1 4.Cb~ -111.RQ7 C.7R0 3.0~1 -1?4.A('P 4.11~ -101.?1q
---1• ~ C.0 ---~. 2 ~t.. _:"'! 11t 7. 5 '• 0 -'t. ':l.•J 4-=2..7 6.. 2 4-~-----------------------------------0.Q?J 4.~?7 -1~].775 4,Q~R -~~~ 0 041 c.n4! ~.C~' -l~4.~to 5.317 -41".110 ().R'>~ ~.'iV -1ll.A7o 'i.7'~·') -4l't.74S
-----.G.~ qn ___ 6. CS'i -2 6. 117 ____ 6. 1 R 3 _-1~5. "'q ~----------C.QJn 6.~1n qr,741 6.~43 -1')~.1?7
-----0.92': ___ 1.11,o ?oc;.lce<, ----7.ror; 4l.q5q-----------·--·--· n.~4~ 7.~sP ?"'i.P?l 7.5?6 1"1.377 L,G6~ 8.141 ?~~.~11 7. 0 29 2~1.65')
___ t;._o_~_C n • ~.-q __ ?_C~ • ~')rJ ~.3\'. ".\_2:}?_. 2C7;,-----------------------------------l.C~1 G,Ol~ 2~7.143 q,A~7 ~4.G?3 1.C2~ 0 ,4?3 124.6A4 q,CG') -q3.q'i6 1,r4~ c.~7Q -??.Pl~ o.~b~ -?qq,q6l :.r~; H,-,c-;1 -;:(<.'"1'~ 1,71d -C.,Q?.~1?
--~ -- t. C 0 "' --- 1_ ( • 7 ) ~ - L.' ] • "r. ~" ·---1 r .• 1 7'• --..:r) "i P. 1 (' 't 1 • 1 rv" 1 1 • 1 :'\ ::j -" P..,. t. J , 1 f). h IJ c -7 r 7. , ,) 1 1.1?1 11.71° -(7h,?~~ 11.711 -5~S.71S
__ _..1 • 14J --~ 7 • 2 q L_..= r (' o • ? r':o ___ ll , P :-o ~ :. , _ _._a ('1!...-----------------------------------1 • 1 f) J 1 ? • () ~ 1 - '3 ? (' • 7 ° 7 1 ? • 4 li l 1 'i ~( • 1 2 6 1.1~~ 13,414 S4.~4P 13.1~4 ~45.12"' 1.?0,~ 13,Gq~ ~~R.1Jr, 13.H17 °"'1.4'~ 1.''~ 14,4~4 <~o.l/4 14.4"1 0~1.o~s
--· ---- 1 0 ? It')-- . li. o q 7 4 1 <:'"' • 'l l q-· -- 1 'i • .) C, 1 -- 7 C., Po '/ 'i 4 ----------------------------· l,?b~ l~.t.~'J -lqf,7h') 1'i.~<~ l~1.S40 1 • 7 ~ ') 1 5. c: ~ - H;". 1 ~ c1 1 6. '1 4 - ~ (\. 1 r t 1.~1~ 1f.4J~ -n~r.?~? lh.A10 -S'J?.~a4~-------~----------------------~ ----1 • 3 ? ,-. --~ f: • r; S :;>.: 1' S 0 • ~ 1 O--~ 1 o 4 < 0 =1 r_ J ·1., • I) ( <"i 1 • ~ 4 ·1 1 7 • 'i s o - r 1 f: • "i n o 1 ~ • l 0 '•- l ? '"' " • ~ a 1 1.~.'-,'i }q.27? -?4?,1')() 1fi.70') -Q"'l.].3' .. 1 1 • 'l, 0 ~ l R • <) ? r, l. '3 1 , ? c::.,? 1 o o 4 P 'l -? 11 o It 7 S -----------
--~-- 1 • 4 ~ ') -- - l o • A 1 q . f ~' <; • "' :> ~ - ? (: • 1 , f1 . 'i 7 ~ • 4 q q ----
1,4?' ?~.11P r~a.~"7 ?".7°6 l(~h.791 1.44' ?1.014 f?0.000 ?1.160 01?.141
I 1.!1."~ 2 1 .. 1--7 3 _l ) ~ • 0 1 'l__ll , .C:? Z_?_ft ~-, ~ ?~"----------.-------------------------1 • 1t Q 'i ? ?. • 1 -~ 6 - '• ') r • 7 1 )1 ? ') • 1+ 7 c - 7.) r • l "' 3 1.c~1 7'l,.~?7 -ch4.,?5 ?1.r4~-1'iq7.P7~ 1,~2~ ''·7~'-11AQ,7lr ?~.~54-1~'~.~?6
_. 1 , 'i 4 0 ' 4 • ., ~. ~ - c; ) ~ • ~ 2 7 2 '• • 1 ' r- 14: f. • 4 1 o --------- ·----
..... w VI

t t:s~a 25.v11, -22CJ.C47 zc:;.C1?e -149.6R4---· 1.~~0 ?h.163 t?4.?~7 ?~.751 1(7~.0?1 l.~n~ ?~.n~~ 1176.?4~ ?~.464 l512.7R~
___ lL~?" (2_~_f'lJ_Ll_~_n_.3._!:l') ?7. !_~4 q]_2.3_5 ~-------------------------------1 • h '• ,., ? q • ., 7 7 t) ? 7 • Sl 4 ') ? 7 • c, :rr-=-t q "). • ~ :::) ') l.A~') ?0.070 -414.?7., ?D.51P-ll14.??3 t.~P0 2°.R~4-1~7~."l.~C ?0.244-?0~?.37~
___ 1.7~') ':l.':·.t;.~"-1776.P47 ~0.(11(-17')~.01~ le 7?1 --~1. ~')Q-} {?Q .QO(f-"l•J. ? 7 6 -~'>R. 1'11+-------------1.74" 1?.156 47.2~1 31.7'16 13'A.0:7 1.1~n ~2.Q2° 11~?.~?~ 12.~~'1 2?~~.5~7
-----:-1 .1~n ~:_._6_~l._lil_r._._I~.l--~3._!t_f_~0_:~~~'~-------------------------------~.RC0 ":1.4.171 7P.~oa 14.117 740.140 l.A~J ~5.r76-1354.74? ~5.144 -Qt,~.1"5 1.041 ~S.Pl1-??6~.74~ 1r,.nn8-?l~O.l63 l.R~n. l6.51P-lPR4.~05 3A.IlQ~-2?76.R"l.Q
---1 • ~ Q ') ---, 7. 4 3't --2 f 5. (' 7 '--, 7. '? 1 g -~ 9 ') -~. i) ~ -~--------------------------------
1.00~ 3Q.2Ql 1~1c.n77 ~P.747 111~.4Rq l.Q2) 10.110 1~~C.h~n 39.~? 0 2441.5C4 j 0 C4~ "l.O•C~' ~C?.?6D 40.470 2~G0.7R7
--- 1 .-G-, 7'1 4 ~ .-11s- rc 1c: .-11 P.--zt 1; 1 o ~-s-,-.--r.-~.-------------------------------l.QqJ 41.61~-2/PA.n?~ 42.\04-?2~7.q~~ 2.G0n 42.497-?1QA.~63 42.9~2-?247.1Aq
. ---. --· -----·----------------------------------------
!
1-' w 0'1

VITA
Charles Arthur Gross was born on April 14, 1937, in
Mobile, Alabama. After completing his elementary and
secondary education there, he enrolled in the University
of Alabama in 1955 at Tuscaloosa, Alabama. From this
institution he received a Bachelor of Science Degree in
Physics and a Bachelor of Science Degree in Electrical
Engineering in January,l960 and 1961, respectively. After
a period divided between active military service and
industrial experience, he came to the University of
Missouri -- Rolla.
From September, 1962, to the time of this writing,
the author has been an instructor and has been engaged in
graduate work at the University of Missouri -- Rolla,
receiving his Master of Science Degree in Electrical Engin
eering in June, 1966.
His society memberships include Tau Beta Pi, Eta
Kappa Nu, and Pi Mu Epsilon honor societies and I.E.E.E.
and A.S.E.E. professional societies. He was the recipient
of an Outstanding Teacher Award in 1966.
He is married and has three sons.
137