-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
1/161
A LOW POWER DESIGN METHODOLOGY FOR TURBO
ENCODER AND DECODER
RAJESHWARI. M. BANAKAR
DEPARTMENT OF ELECTRICAL ENGINEERING
INDIAN INSTITUTE OF TECHNOLOGY, DELHI
INDIA
JULY 2004
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
2/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
3/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
4/161
Intellectual Property Rights (IPRs) notice
Part of this thesis may be protected by one or more of Indian
Copyright Registrations (Pend-
ing) and/or Indian Patent/Design (Pending) by Dean, Industrial
Research & Development
(IRD) unit, Indian Institute of Technology Delhi (IITD) New
Delhi-110016, India. IITD
restricts the use, in any form, of the information, in part or
full, contained in this thesis
ONLY on written permission of the competent Authority: Dean,
IRD, IIT Delhi OR MD,
FITT, IIT Delhi.
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
5/161
A LOW POWER DESIGN METHODOLOGY FOR TURBO
ENCODER AND DECODER
by
RAJESHWARI M. BANAKAR
DEPARTMENT OF ELECTRICAL ENGINEERING
Submitted
in fulfillment of the requirements of the degree of
Doctor of Philosophy
to the
INDIAN INSTITUTE OF TECHNOLOGY, DELHI
INDIA
July 2004
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
6/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
7/161
Certificate
This is to certify that the thesis titled A Low Power Design
Methodology for Turbo
Encoder and Decoder being submitted by Rajeshwari M. Banakar in
the Department of
Electrical Engineering, Indian Institute of Technology, Delhi,
for the award of the degree
of Doctor of Philosophy, is a record of bona-fide research work
carried out by her under
our guidance and supervision. In our opinion, the thesis has
reached the standards fulfilling
the requirements of the regulations relating to the degree.
The results contained in this thesis have not been submitted to
any other university or
institute for the award of any degree or diploma.
Dr. M Balakrishnan Dr. Ranjan Bose
Head Associate Professor
Department of Department of
Computer Science & Engineering Electrical Engineering
Indian Institute of Technology Indian Institute of
Technology
New Delhi - 110 016 New Delhi - 110 016
i
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
8/161
ii
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
9/161
Acknowledgments
I would like to express my profound gratitudes to my Ph.D
advisors Prof M Balakrishnan
and Prof Ranjan Bose for their invaluable guidance and
continuous encouragement during
the entire period of this research work. Their technical acumen,
precise suggestions and
timely discussions whenever I was in some problem is whole
heartily appreciated.
I wish to express my indebtedness to SRC/DRC members Prof Anshul
Kumar, Prof
Patney and Prof Shankar Prakriya for their helpful suggestions
and lively discussions dur-
ing the research work. I am grateful to Prof Preeti Panda and
Prof G.S.Visweswaran for
their useful discussions.
I would like to thank Prof Surendra Prasad and Prof S.C.Dutta
Roy who were the key
persons in the phase of choosing this premier institute for my
research activity.
Part of this research work was carried out at the Universitat of
Dortmund Germany
under DSD/DAAD project. My sincere thanks to Prof Peter Marwedel
for his valuable
guidance and pleasant gesture during my stay there. Thanks to
the research scholars Lars
Wehmeyer, Stefan Steinke and a graduate student Bosik Lee of the
embedded systems
design group for the help and support.
I am thankful to the Director of Technical Education, Karnataka
and management B.V
Bhoomaraddi Engineering College Hubli, Karnataka for granting
leave and giving me this
opportunity to do my research.
My thanks are due, to my friends B. G. Prasad, S. C. Jain,
Manoj, Basant, Bhuvan,
Satyakiran, Anup, Viswanath, Vishal, C. P. Joshi, Uma and the
other enthusiastic embedded
system team members at the Philips VLSI Design Lab for their
lively discussions. It was an
iii
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
10/161
enjoyable period and great experience to work as a team member
in the energetic embedded
systems group IIT Delhi.
I would also like to thank all other faculties, laboratory and
administrative staff of De-
partment of Computer Science and Engineering and Department of
Electrical Engineering
for their help. A special mention deserves to Ms Vandana
Ahluwalia for her helping attitude
accompanied with pleasure during the research period.
Thanks to my brothers, sisters, friends and other family members
for their support. I
wish to accord my special thanks to my husband Dr Chidanand
Mansur for his moral and
emotional support throughout the deputation period for the
research work. With highest
and fond remembrance I recollect each day of this research work,
which turned to be an
enjoyable, comfortable and cherished moment due to my caring
kids Namrata and Vidya.
Their helping little hands, lovely painted greeting cards and
smiling faces at home front
in IIT Delhi needs a special appreciation. This thesis is
dedicated to my parents late Shri
Mahalingappa Banakar and late Smt Vinoda Banakar who were a
source of inspiration
during their life period.
New Delhi Rajeshwari Banakar
iv
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
11/161
Abstract
The focus of this work is towards developing an application
specific design methodology
for low power solutions. The methodology starts from high level
models which can be used
for software solution and proceeds towards high performance
hardware solutions. Turbo
encoder/decoder, a key component of the emerging 3G mobile
communication is used as
our case study. The application performance measure, namely
bit-error rate (BER) is used
as a design constraint while optimizing for power and/or
area.
The methodology starts from algorithmic level, concentrating on
the functional correct-
ness rather than on implementation architecture. The effect on
performance due to variation
in parameters like frame length, number of iterations, type of
encoding scheme and type of
the interleaver in the presence of additive white Gaussian noise
is studied with the floating
point C model. In order to obtain the effect of quantization and
word length variation, a
fixed point model of the application is also developed.
First, we conducted a motivational study on some benchmarks from
DSP domain to
evaluate the benefit of custom memory architecture like the
scratch pad memory (SPM).
The results indicate that SPM is energy efficient solution when
compared to conventional
cache as on-chip memory. Motivated by this we have developed a
framework to study
the benefits of adding small SPM to the on-chip cache. To
illustrate our methodology we
have used ARM7TDMI as the target processor. In this application
cache size of 2k or 4k
combined with a SPM of size 8k is shown to be optimal.
Incorporating SPM results in an
energy improvement of 51.3
.
Data access pattern analysis is performed to see whether
specific storage modules like
v
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
12/161
FIFO/LIFO can be used. We identify FIFO/LIFO to be an
appropriate choice due to the
regular access pattern. A SystemC model of the application is
developed starting from the
C model used for software. The functional correctness of SystemC
model is verified by
generating a test bench using the same inputs and intermediate
results used in the C model.
One of the computation unit, namely the backward metric
computation unit is modified to
reduce the memory accesses.
The HDL design of the 3GPP turbo encoder and decoder is used to
perform bit-width
optimization. Effect of bit width optimization on power and area
is observed. This is
achieved without unduly compromising on BER. Overall area and
power reduction achieved
in one decoder due to bit width optimization is 46
and 35.6
respectively.
At the system level, power optimization can be done using power
shut-down of unused
modules. This is based on the timing details of the turbo
decoder in the VHDL model. To
achieve this a power manager is proposed. The average power
saving obtained is around
55.5% for the 3GPP turbo decoder.
vi
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
13/161
Contents
1 Introduction 1
1.1 The system design problem . . . . . . . . . . . . . . . . .
. . . . . . . . . 2
1.2 Turbo Encoder and Decoder . . . . . . . . . . . . . . . . .
. . . . . . . . 4
1.3 Thesis Organization . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 5
2 Turbo coding application 7
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 7
2.1.1 Applications of turbo codes - A scenario in one decade
(1993-2003) 9
2.2 Turbo Encoder . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 12
2.2.1 Four state turbo encoder . . . . . . . . . . . . . . . . .
. . . . . . 12
2.2.2 Eight state turbo encoder - 3GPP version . . . . . . . . .
. . . . . 14
2.3 Turbo Decoder . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 15
2.3.1 Decoding Algorithm . . . . . . . . . . . . . . . . . . . .
. . . . . 16
2.4 Experimental set up . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 21
2.5 Simulation Results . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 22
2.5.1 Effect of varying frame-length on code performance . . . .
. . . . 24
2.5.2 Effect of varying number of iterations on performance . .
. . . . . 24
2.5.3 4 state vs 8 state (3GPP) turbo decoder performance . . .
. . . . . 26
2.5.4 Interleaver design considerations . . . . . . . . . . . .
. . . . . . . 26
2.5.5 Effect of Quantization . . . . . . . . . . . . . . . . . .
. . . . . . 31
2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 34
vii
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
14/161
3 On chip Memory Exploration 35
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 35
3.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 37
3.3 Scratch pad memory as a design alternative to cache memory .
. . . . . . . 37
3.3.1 Cache memory . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 38
3.3.2 Scratch pad memory . . . . . . . . . . . . . . . . . . . .
. . . . . 40
3.3.3 Estimation of Energy and Performance . . . . . . . . . . .
. . . . 44
3.3.4 Overview of the methodology . . . . . . . . . . . . . . .
. . . . . 45
3.3.5 Results and discussion . . . . . . . . . . . . . . . . . .
. . . . . . 47
3.4 Turbo decoder : Exploring on-chip design space . . . . . . .
. . . . . . . . 51
3.4.1 Overview of the approach . . . . . . . . . . . . . . . . .
. . . . . 51
3.4.2 Experimental setup . . . . . . . . . . . . . . . . . . . .
. . . . . . 53
3.4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 54
3.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 61
4 System Level Modeling 63
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 63
4.2 Related work . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 64
4.3 Work flow description . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 65
4.4 Functionality of turbo codes . . . . . . . . . . . . . . . .
. . . . . . . . . 65
4.5 Design and Analysis using SystemC specification . . . . . .
. . . . . . . . 67
4.5.1 Turbo decoder : Data access analysis . . . . . . . . . . .
. . . . . 68
4.5.2 Decoder : Synchronization . . . . . . . . . . . . . . . .
. . . . . . 70
4.6 Choice of on-chip memory for the application . . . . . . . .
. . . . . . . . 71
4.7 On-chip memory evaluation . . . . . . . . . . . . . . . . .
. . . . . . . . 74
4.7.1 Reducing the memory accesses in decoding process . . . . .
. . . . 75
4.8 Synthesis Observations . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 78
4.9 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 79
viii
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
15/161
5 Architectural optimization 81
5.1 Objectives . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 81
5.2 Related work . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 82
5.3 Bit-width precision . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 83
5.4 Design modules . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 84
5.4.1 Selector module . . . . . . . . . . . . . . . . . . . . .
. . . . . . 84
5.4.2 Top level FSM controller unit . . . . . . . . . . . . . .
. . . . . . 85
5.5 Design flow . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 87
5.5.1 Power estimation using XPower . . . . . . . . . . . . . .
. . . . . 88
5.6 Experimental Observations . . . . . . . . . . . . . . . . .
. . . . . . . . . 89
5.6.1 Impact of bit optimal design on area estimates . . . . . .
. . . . . . 89
5.6.2 Power reduction due to bit-width optimization . . . . . .
. . . . . 94
5.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 96
6 System Level Power Optimization 101
6.1 Objectives . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 101
6.2 Related work . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 102
6.3 General design issues - Power Shut-Down Technique . . . . .
. . . . . . . 103
6.4 Turbo Decoder : System level power optimization . . . . . .
. . . . . . . . 104
6.5 Experimental setup . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 106
6.5.1 Experimental results . . . . . . . . . . . . . . . . . . .
. . . . . . 108
6.5.2 Power optimization . . . . . . . . . . . . . . . . . . . .
. . . . . . 112
6.5.3 Branch metric simplification . . . . . . . . . . . . . . .
. . . . . . 116
6.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 116
7 Conclusion 119
7.1 Our design methodology . . . . . . . . . . . . . . . . . . .
. . . . . . . . 119
7.2 Results summary . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 123
7.3 Future directions . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 125
ix
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
16/161
x
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
17/161
List of Figures
2.1 (a) The encoder block schematic (b) 4 state encoder details
(Encoder 1
and Encoder 2 are identical in nature) (c) State diagram
representation (d)
Trellis diagram . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 13
2.2 The 8 state encoder 3GPP version . . . . . . . . . . . . . .
. . . . . . . 15
2.3 Decoder schematic diagram . . . . . . . . . . . . . . . . .
. . . . . . . . . 17
2.4 Impact on performance for different frame-length used,
simulated for six
iterations varying the SNR. . . . . . . . . . . . . . . . . . .
. . . . . . . . 23
2.5 Impact on performance for varying number of iterations, N
=1024, 8 state
turbo code . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 25
2.6 Comparing 4 state and the 8 state turbo code (floating point
version), N =
1024, RC symmetric interleaver, six iterations. . . . . . . . .
. . . . . . . . 27
2.7 Random interleaver design - Our work with Bruces 4 state
turbo code [61] 29
2.8 Illustration of interleaving the data elements . . . . . . .
. . . . . . . . . . 30
2.9 Comparing our work with Mark Hos [41] using a symmetric
interleaver . . 32
2.10 Impact of word length variation on bit error rate of the
turbo codes . . . . . 33
3.1 Cache Memory organization [75] . . . . . . . . . . . . . . .
. . . . . . . . 38
3.2 Scratch pad memory array . . . . . . . . . . . . . . . . . .
. . . . . . . . 41
3.3 Scratch pad memory organization . . . . . . . . . . . . . .
. . . . . . . . 42
3.4 Flow diagram for on-chip memory evaluation . . . . . . . . .
. . . . . . . 46
3.5 Comparison of cache and scratch pad memory area . . . . . .
. . . . . . . 48
3.6 Energy consumed by the memory system . . . . . . . . . . . .
. . . . . . 50
xi
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
18/161
3.7 Framework of the design space exploration . . . . . . . . .
. . . . . . . . 52
3.8 Energy estimates for the turbo decoder with N = 128 . . . .
. . . . . . . . 57
3.9 Energy estimates for the turbo decoder with N =256 . . . . .
. . . . . . . . 58
3.10 Performance estimates for Turbo decoder . . . . . . . . . .
. . . . . . . . 60
4.1 The turbo coding system . . . . . . . . . . . . . . . . . .
. . . . . . . . . 66
4.2 Input data with the index value . . . . . . . . . . . . . .
. . . . . . . . . . 68
4.3 Code segment to compute llr . . . . . . . . . . . . . . . .
. . . . . . . . . 69
4.4 Synchronization signals illustrating the parallel events . .
. . . . . . . . . . 71
4.5 Data flow and request signals . . . . . . . . . . . . . . .
. . . . . . . . . . 73
4.6 (a) Unmodified
unit (b) Modified
unit . . . . . . . . . . . . . . . . . . 77
4.7 Area distribution pie chart representation . . . . . . . . .
. . . . . . . . . . 78
5.1 State diagram representation of FSM used in the turbo
decoder design . . . 86
5.2 Design flow showing the various steps used in the bit-width
analysis . . . . 87
5.3 Depicting the area for 32 bit design vs bit optimal design .
. . . . . . . . . 97
5.4 Power estimates of turbo decoder design . . . . . . . . . .
. . . . . . . . . 98
5.5 Area and Power reduction due to bit-width optimization turbo
decoder design 99
6.1 Illustrating the turbo decoder timing slots which helps to
define the sleep
time and the wake time of the on chip memory modules (
= time slot) . . . 105
6.2 Tasks in the decoder vs the time slot (Task graph). . . . .
. . . . . . . . . . 107
6.3 Block diagram schematic of the power manager unit . . . . .
. . . . . . . . 115
7.1 Turbo Decoder : Low power application specific design
methodology . . . 121
xii
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
19/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
20/161
6.4 Power estimates in the individual decoder, active time slot
information with
the associated power saving due to sleep and wake time analysis.
. . . . . . 112
6.5 Database to design the power manager for the 8 state turbo
decoder (1 =
Active, 0 = Doze) . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 114
6.6 Power and area saving due to the branch metric
simplification . . . . . . . 116
xiv
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
21/161
Chapter 1
Introduction
Application specific design is a process of alternative design
evaluations and refined im-
plementations at various abstraction levels to provide efficient
and cost effective solutions.
The key issues in an application specific design are the cost
and performance as per the
application requirement with power consumption being the other
major issue. In hand held
and portable applications like cellular phones, modems, video
phones and laptops, batteries
contribute a significant fraction of its total volume and weight
[1, 2]. These applications
demand low power solutions to increase the battery life.
The growing concern for early time to market coupled with the
complexity of the sys-
tems have led to the research and development of efficient
design methodologies. Tra-
ditionally, handing over of manually prepared RTL design
documents to the application
developer have been used for the implementation. Since the
introduction of hardware-
software codesign concepts in this decade (1993 to 2003),
suitable frameworks are being
favored due to their overall operational advantages when details
of performance, energy
and area costs are captured during the system level design
stage.
To define application specific methodology, it is essential to
specify steps to come up
with a suitable design while ensuring the application
functionality and features. As the
design methodology progresses, detailed functional assessment
continues to provide valu-
able input for analyzing initial design concepts and in later
stages of application constraints
1
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
22/161
and quality of implementation. The design methodology can be
used to make significant
changes during early stages which results in a wide design space
exploration. A key con-
cern is the design turnaround time. Common test bench across
various levels of design
abstraction is one approach which is effective in reducing
development time.
1.1 The system design problem
The design space including memory design issues of power
efficient architectures are dif-
ferent than the design space of a general-purpose processors. In
particular when the ap-
plication specific design space is considered, the application
parameters which impact the
quality should be taken into account and these are quite
application specific. The system
design problem is to identify the application parameters which
will have an impact on the
overall architecture. Increasingly, today system design
approaches tries to address these
issues at a high level of design abstraction while providing a
structured methodology for
refinement of the design.
Low power design of digital integrated circuits has emerged as a
very active and rapidly
developing field. Power estimation can be done at different
stages of system design as
illustrated in [3 - 29]. These estimations can drive the
transformations to choose low power
solutions. Transformations done at the higher level of
abstraction namely the system level
have a greater impact, whereas estimations are generally more
accurate at the lower levels
of abstractions like the transistor level and the circuit level
[30].
Klaus et al. [31] present high level DSP design methodology
raising the design entry
to algorithmic and behavioral level instead of specifying a
detailed architecture on reg-
ister transfer level. They concentrate mainly on the issues of
functional correctness and
verification. No optimization techniques are considered in their
work.
Another design methodology example is the work of Zervas et al.
[32]. They pro-
pose a design methodology using communication applications for
performance analysis.
Power savings through various level of design flow are
considered and examined for their
2
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
23/161
efficiency in the digital receiver context. The authors deal
mainly with the data path opti-
mization issues for low power implementation.
In our approach, architecture exploration using SystemC is
performed, quantifying the
power savings using bit-width optimization and the power shut
down technique for the
application using control flow diagram. The application
parameters like the information
length and its performance parameter namely the bit error rate
to the power consumption
during the bit-width optimization are correlated.
Memory units represent a substantial portion of the power as
well as area and form
an important constituent of such applications. Typically power
consumed by memory is
distributed across on-chip as well as off-chip memory. A large
memory implies slower
access time to a given memory element and also increases the
power consumption. Memory
dominates in terms of the three cost functions viz area,
performance and power. On-chip
caches using static RAM consume power in the range of 25
to 45
of the total chip
power [33]. For example, in the Strong ARM 110, the cache
consumes 43
[34] of total
power.
Cathoor et al. [35, 36] describe the custom memory design
issues. Their research fo-
cuses on the development of methodologies and supporting tools
to enable the modeling
of future heterogeneous reconfigurable platform architectures
and the mapping of applica-
tions onto these architectures. They analyse the memory
dominated media applications for
data transfer and storage issues. Although they concentrate on a
number of issues related
to reducing memory power, custom memory option like the scratch
pad memory is not
studied.
When considering power efficient architectures, along with
performance and cost, on-
chip memory issues are also included as an important dimension
of the design space to
be explored. The application algorithmic behavior in terms of
its data access pattern is an
additional feature to be included in the design space
exploration to take a decision on the
type of on-chip memory.
One of our research goals is to provide a suitable methodology
for on-chip memory
3
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
24/161
exploration issues in power efficient application specific
architectures. In our solution,
scratch pad memory as an attractive design alternative is
proposed. At the system level
the energy and performance gain by adding a small scratch pad
memory to on-chip cache
configuration is evaluated. Further, in a situation of
distributed memory, shut-down of
unused memory blocks in a systematic manner is proposed.
1.2 Turbo Encoder and Decoder
Turbo codes were presented in 1993, by Berrou et al. [37] and
since then these codes have
received a lot of interest from the research community as they
offer better performance than
any of the other codes at very low signal to noise ratio. Turbo
codes achieve near Shannon
limit error correction performance with relatively simple
component codes. A BER of
is reported for a signal to noise ratio of 0.7 dB [37].
Advances in third generation (3G) systems and beyond will cause
a tremendous pres-
sure on the underlying implementation technologies. The main
challenge is to implement
these complex algorithms with strict power consumption
constraint. Improvement in the
semiconductor fabrication and the growing popularity of hand
held devices are resulting
in computation intensive portable devices. Exploration of novel
low power application
specific architectures and methodologies which address power
efficient design capable of
supporting such computing requirement is critical.
In communication systems specifically wireless mobile
communication applications,
power and size are dominant factors while meeting the
performance requirements. Perfor-
mance being measured not only by data rate but also by the the
corresponding bit error
rate (BER). In this one decade (1993 - 2003) turbo codes have
been used in a number
of applications like Long-haul terrestrial wireless systems, 3G
systems, WLAN, Satellite
communication, Orthogonal frequency division multiplexing
etc.
The algorithmic specifications and the performance
characterization of the turbo codes
form a pre-requisite study to develop a low power solution.
Functional analysis of turbo
4
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
25/161
decoder with simplified computation metric to save on power as
well as the architectural
features like bit-width are closely related to the application
parameter like bit-error rate
(BER).
1.3 Thesis Organization
The thesis is organized as follows :
Chapter 2 deals with the algorithmic details of the specific
application under consider-
ation namely the turbo coding system. The effect of varying
various parameters like the
frame length, number of iterations, type of encoder, type of
interleaver and quantization is
presented. The main focus of this chapter being the development
of various C models of
the application, which is the first step in our application
specific design methodology.
In Chapter 3, a motivational study for the evaluation of energy
efficient on-chip memory
is conducted. A design methodology to show that scratch pad
memory is an energy efficient
on-chip memory option in embedded systems vis-a-vis cache is
developed. For the specific
turbo decoder, which is memory intensive, we demonstrate that
suitable combination of
cache and scratch pad memory proves beneficial in terms of
energy consumption, area
occupied and performance.
In Chapter 4, the data access analysis to see if any other
custom memory is suitable
for the specific application is done. It is concluded that
FIFO/LIFO on-chip memory is
appropriate. The architecture at the system level using SystemC
is explored for functional
verification of the design and show the benefit of modifying one
of the computational unit
to reduce the memory accesses.
In Chapter 5, the architecture optimization namely the bit width
optimization is consid-ered as a low power design issue. A VHDL
model for the 3G turbo decoder to estimate the
power and area occupied by the design is developed.
In Chapter 6, system level power optimization technique is
studied. More specifically,
the power shut-down method is considered. The sleep time and the
wake-up time of the
5
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
26/161
design modules is derived from the timing details available from
the HDL model. As a
system level power optimization option, the power shutdown
technique for the turbo codes
is applied to quantify the power savings. Design of a suitable
power manager is proposed.
In Chapter 7, the application specific flow methodology is
summarized with focus on
low power. The results of our work on low power turbo encoder
and decoder are also
summarized with future directions in this area.
6
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
27/161
Chapter 2
Turbo coding application
2.1 Introduction
Efficient methodology for the application specific design
reduces the time and effort spent
during design space exploration. The turbo code application from
the area of wireless
communications is chosen as the key application for which an
application specific design
methodology is developed. The functionality and specific
characteristics of the application
are needed to carry out the design space exploration. The
application characteristics studied
are, the impact on the performance of the turbo codes with
variation in the size of the input
message (frame-length), type of the interleaver and the number
of decoding iterations.
Turbo coding is a forward error correction (FEC) scheme.
Iterative decoding is the key
feature of turbo codes [37, 38]. Turbo codes consist of
concatenation of two convolution
codes. Turbo codes give better performance at low SNRs (signal
to noise ratio) [39, 40].
Interestingly, the name Turbo was given to this codes because of
the cyclic feedback mech-
anism (as in Turbo machines) to the decoders in an iterative
manner.
The turbo encoder transmits the encoded bits which form inputs
to the turbo decoder.
The turbo decoder decodes the information iteratively. Turbo
codes can be concatenated in
series, parallel or in a hybrid manner. Concatenated codes can
be classified as parallel con-
catenated convolution codes (PCCC) or serial concatenated
convolutional codes (SCCC).
7
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
28/161
In PCCC two encoders operate on the same information bits. In
SCCC, one encoder en-
codes the output of another encoder. The hybrid concatenation
scheme consists of the
combination of both parallel and serial concatenated
convolutional codes. The turbo de-
coder has two decoders that perform iterative decoding.
Convolutional codes can be viewed
in different ways. Convolutional codes can be represented by
state diagrams. The state of
the convolutional encoder is determined by its contents.
Two versions of the turbo codes are studied in detail. One is
the four state turbo code
and the other is 3GPP (third generation partnership project)
version which has eight states.
BER in case of 3GPP turbo code shows significant improvement
over the four state version,
although the computational complexity of the decoder is high
when compared to the four
state turbo code system. The impact of quantization on the BER
at the algorithmic level is
studied.
In this chapter, the impact of different frame lengths of the
message on the bit error rate
(BER) is analyzed. The impact of varying the number of
iterations on the BER is stud-
ied. The model developed is compared to Mark Hos model [41, 42]
and the results have
been found to closely tally. A comparison of the performance of
the random interleaver
implementation and the symmetric interleaver is done.
The rest of the chapter is organized as follows. The various
application areas of turbo
codes are described in subsection 2.1.1. Section 2.2 describes
the details of the encoder
schematic. Section 2.3 discusses the turbo decoder and its
performance issues. Section 2.4
gives the experimental set up. Section 2.5 presents the results
of various experiments. The
interleaver design considerations are discussed followed by the
explanation of the effect of
quantization. Finally section 2.6 summarizes the chapter.
8
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
29/161
2.1.1 Applications of turbo codes - A scenario in one decade
(1993-
2003)
The following paragraphs briefly discuss several application
areas where turbo codes are
used.
Mobile radio :
Few environments require more immunity to fading than those
found in mobile com-
munications. For applications where delay vs performance is
crucial, turbo codes
offer a wide trade-off space at decoder complexities equal to or
better than conven-
tional concatenated code performance. The major benefit is that
such systems can
work with smaller constraint-length convolutional encoders. The
major drawback isdecoder latency. Turbo codes with short delay are
being heavily researched. Turbo
codes generally outperform convolutional and block codes when
interleavers exceed
200 bits in length [43].
Digital video :
Turbo codes are used as part of the Digital Video Broadcasting
(DVB) standards.
ComAtlas, a French subsidiary of VLSI Inc, has developed a
single-chip turbo code
codec that operates at rates to 40M bps. The device integrates a
32x32-bit interleaver
and performance is reportedly at least as good as with
conventional concatenated
codes using a Reed-Solomon outer code and convolutional inner
code [44].
Long-haul terrestrial wireless :
Microwave towers are spread across and communications between
them is subjected
to weather induced fading. Since these links utilize high data
rates, turbo codes with
large interleavers effectively combat fading, while adding only
insignificant delay.
Furthermore, power savings could be important for towers in
especially remote areas,
where turbo codes are used. [45].
9
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
30/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
31/161
Oceanographic Data-Link :
This data-link is based on the Remote Environmental Data-Link
(REDL) design.
ViaSat is a company offering satellite networking products.
ViaSat offers a modem
with turbo encoding and decoding. It is reported that turbo
coding increases the
throughput and decreases the bandwidth requirement. [50].
Image processing :
Embedded image codes are very sensitive to channel noise because
a single bit er-
ror can lead to irreversible loss of synchronization between the
encoder and the de-
coder. Turbo codes are used for forward error correction in
robust image transmis-
sion. Turbo codes are suited in protecting visual signals, since
these signals are
typically represented by a large amount of data even after
compression. [51, 52, 53].
WLAN (Wireless LAN) :
Turbo codes can increase the performance of a WLAN over
traditional convolutional
coding techniques. Using turbo codes, an 802.11a system can be
configured for high
performance. The resulting benefits to the WLAN system are that
it requires less
power, or it can transmit over a greater coverage area. Turbo
code solution is used to
reduce power and boost performance in the transmit portion of
mobile devices in a
wireless local area network (WLAN). [54]
OFDM :
The principles of orthogonal frequency division multiplexing
(OFDM) modulation
have been around for several decades. The FEC block of an OFDM
system can be
realizes by either a block-based coding scheme (Reed-Solomon) or
turbo codes [55].
xDSL modems :
Turbo codes present a new and very powerful error control
technique which allows
communication very close to the channel capacity. Turbo codes
have outperformed
11
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
32/161
all previously known coding schemes regardless of the targeted
channel. Standards
based on turbo codes have been defined. [56].
These applications indicate that turbo codes can play a vital
role in many of the commu-
nications systems which are being designed. Low power, memory
efficient implementation
of turbo codes is thus an important research area.
2.2 Turbo Encoder
Turbo coding system consists of the turbo encoder and the turbo
decoder. The description
of the four state and eight state (3GPP), turbo encoder used in
our design is discussed.
2.2.1 Four state turbo encoder
The general structure of a turbo encoder architecture consists
of two Recursive Systematic
Convolutional (RSC) encoders Encoder 1 and Encoder 2. The
constituent codes are RSCs
because they combine the properties of non-systematic codes and
systematic codes [40, 38].
In the encoder architecture displayed in Figure 2.1 the two RSCs
are identical. The N bit
data block is first encoded by Encoder 1. The same data block is
also interleaved and
encoded by Encoder 2. The main purpose of the interleaver is to
randomize burst error
patterns so that it can be correctly decoded. It also helps to
increase the minimum distance
of the turbo code [57]. Input data blocks for a turbo encoder
consist of the user data and
possible extra data being appended to the user data before turbo
encoding.
The encoder consists of a shift register and adders as shown in
Fig. 2.1 (b). The struc-
ture of the RSC encoder is fixed for the design because enabling
varying encoder structures
would significantly increase the complexity of the decoder by
requiring to adapt to the new
trellis structure and computation of the different metrics in
the individual decoders.
The input bits are fed into the left end of the register and for
each new input bit two
output bits are transmitted over the channel. These bits depend
not only on the present
input bit, but also on the two previous input bits, stored in
the shift register.
forms
12
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
33/161
Encoder 1
Encoder 2
Encoded
message
xs
xp1
xp2uk_int
ukInput message
Interleaver
Concatenate
Notation used in trellis diagram
11
10
01
00 0./00
1/11
1/01
0/10
1/11
0/00
1/01
0/10
0./00
1/11 1/11 1/11 1/11
1/01 1/01 1/01
0/10 0/10
1/01 1/01
0/10 0/10
0/00
uk=0 uk=1
S0=
S1=
0./00 0./00 0./00
1/11 1/11
0/00
0/10
D D
u(k)
parity bits xp1[k]
S311
S210
S101
So
00
0/00
1/111/11
0/00
1/01
0/100/10
1/01
STATE Diagram
systematic bits
(b)(a)
(c) (d)
Figure 2.1: (a) The encoder block schematic (b) 4 state encoder
details (Encoder 1 andEncoder 2 are identical in nature) (c) State
diagram representation (d) Trellis diagram
13
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
34/161
the systematic bit stream, for the input message of frame length
N. The parity bit stream
depends on the state of the encoder. For a given information
vector (input message)
of frame-length
, the code word (encoded message) consists of concatenation of
two
constituent convolutional code words, each which is based on a
different permutation in
the order of the information bits. The working of the encoder
can be understood using a
state diagram given in Fig. 2.1 (c). In an encoder with two
memory elements, there are four
states
,
,
and
. At each incoming bit, the encoder goes from one state to
another.
For the encoder shown in Fig 2.1 (b), there are two encoded bits
corresponding to input bit
0 and 1.
Another way to represent the state diagram is the trellis
diagram [58]. A trellis is a
graph whose nodes are in a rectangular grid semi infinite to the
right as shown in Fig. 2.1
(d). Trellis diagram represents the time evolution of the coded
sequences, which can be
obtained from the state diagram. A trellis diagram is thus an
extension of a state diagram
that explicitly shows passage of time [58]. The nodes in the
trellis diagram correspond to
the state of the encoder. From an initial state (
) the trellis records the possible transitions
to the next states for each possible input pattern. In the
trellis diagram Fig 2.1 (d) at stage
t=1 there are two states
and
and each state has two transitions corresponding to the
input bit 0 and 1. Hence the number of nodes are fixed in a
trellis, which is decided
by the number of memory elements in the encoder. In drawing the
trellis diagram the
convention in specifying the branches introduced by a 0 input
bit as a solid line and the
branches introduced by a 1 input as a dashed line is used.
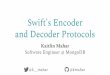
2.2.2 Eight state turbo encoder - 3GPP version
In order to compare and study the characteristics in terms of
the performance, both the four
state and the eight state encoders are implemented. The
difference essentially lies in the
number of memory element that each encoder uses. In contrast to
the two memory element
as in four state encoder, there are three memory elements in an
eight state encoder. This is
the encoder that is specified in the 3GPP standards [38].
14
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
35/161
Parity bits
Systematic bits
+
+ +
+
D D D
+
+ +
+
D D DInputdata
Parity bits
Encoder 1
Encoder 2
Interleaver
8 state encoder schematic
Figure 2.2: The 8 state encoder 3GPP version
The schematic diagram of the 3GPP encoder is shown in Figure
2.2. It consists of two
eight state constituent encoders. The data bit stream goes into
the first constituent encoder
that produces a parity for each input bit. The data bit stream
is scrambled by the interleaver
and fed to the encoder 2. For 3GPP, the interleaver can be
anywhere from 40 bits to 5114
bits long. The data sent across the channel is the original bit
stream, parity bit of the
encoder 1 and the parity bits of the second encoder. So the
entire turbo encoder is a rate
1/3 encoder.
2.3 Turbo Decoder
In this section the iterative decoding process of the turbo
decoder is described. The maxi-
mum a posteriori algorithm (MAP) is used in the turbo decoder.
There are three types of
algorithms used in turbo decoder namely MAP, Max-Log-MAP and
Log-MAP. The MAP
algorithm is a forward-backward recursion algorithm, which
minimizes the probability of
15
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
36/161
bit error, has a high computational complexity and numerical
instability. The solution to
these problems is to operate in the log-domain. One advantage of
operating in log-domain
is that multiplication becomes addition. Addition, however is
not straight forward. Addi-
tion is a maximization function plus a correction term in the
log domain. The Max-Log-
MAP algorithm approximates addition solely as a maximization.
Max-Log-MAP algorithm
in turbo decoder is used in our work [38].
2.3.1 Decoding Algorithm
The block diagram of the turbo decoder is shown in Figure 2.3.
There are two decoders cor-
responding to the two encoders. The inputs to the first decoder
are the observed systematic
bits, the parity bit stream from the first encoder and the
deinterleaved extrinsic information
from the second decoder. The inputs to the second decoder are
the interleaved systematic
bit stream, the observed parity bit stream from the second RSC
and the interleaved extrinsic
information from the first decoder. The main task of the
iterative decoding procedure, in
each component decoder is an algorithm that computes the a
posteriori probability (APP)
of the information symbols which is the reliability value for
each information symbol. The
sequence of reliability values generated by a decoder is passed
to the other one. In this way,
each decoder takes advantage of the suggestions of the other
one. To improve the correct-
ness of its decisions, each decoder has to be fed with
information that does not originate
from itself. The concept of extrinsic information was introduced
to identify the component
of the general reliability value, which depends on redundant
information introduced by the
considered constituent code. A natural reliability value, in the
binary case, is the logarithm
likelihood ratio (llr).
Each decoder has a number of compute intensive tasks to be done
during decoding.
There are five main computations to be performed during each
iteration in the decoding
stage as shown in Figure 2.3. Detailed derivations of the
algorithm can be found in [59, 60,
38]. The computations are as follows (computations in one
decoder per iteration):
16
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
37/161
Deinterleaver Decoder 2
Decoder 1 Interleaver
Interleaver
Iterative Decoding
1. Branch Metric Computation
2. Forward Recursion
3. Backward Recursion
4. Log likelihood Computation
5. Extrinsic Computation
encoder 2 parity bits
encoder 1parity bits
systematicbits
extrinsic
information
InterleaverFinal
estimate
Retrieved message
LLR
Figure 2.3: Decoder schematic diagram
17
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
38/161
Branch metric computation - unit
In the algorithm for turbo decoding the first computational
block is the branch metric
computation. The branch metrics is computed based on the
knowledge of input and
output associated with the branch during the transition from one
state to another (Fig.
2.1 (d)). There are four states and each state has two branches,
which gives a total of
eight branch metrics. The computation of branch metric is done
using (2.1). Upon
simplifying this equation as shown in [61, 62], it is observed
that only two values are
sufficient to derive branch metrics for all the state
transitions.
(2.1)
where
is the branch metric at time k,
are the systematic bits of information
with frame-length N,
is the information that is fed back from one decoder to the
other decoder, is the channel estimate which corresponds to the
maximum signal
to distortion ratio,
is the encoded parity bits of the encoder,
is the noisy
observed values of the encoded parity bits and
is the observed values of the
encoded systematic bits.
The
unit takes the noisy systematic bit stream, the parity bits from
encoder1 and
encoder2 to decoder1 and decoder2 respectively and the apriori
information to com-
pute the branch metrics. The branch metrics
for all branches in the trellis are
computed and stored.
Forward metric computation - unit
The forward metric is the next computation in the algorithm,
which represents
the probability of a state at time k, given the probabilities of
states at previous time
instance.
is calculated using equation (2.2).
18
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
39/161
(2.2)
where the summation is over all the state transitions to . is
computed at each
node at a time instance k in the forward direction traversing
through the trellis. is
computed for states 00, 01, 10 and 11 (refer Fig 2.1 (d) ). In
an 8 state decoder -
3GPP version,
is computed for states 000, 001, 010, 011, 100, 101, 110 and
111
respectively.
Observing a section of the trellis diagram in Figure 2.1 four
metrics are to be
computed, namely
,
,
,
, where k ranges from [0, 1, 2, ...,
N-1]. This metric is termed as forward metric because the
computation order is from
0,1,2,... N-1 and the value for index
is initialized to zero. The
unit recursively
computes the metric using
values computed in the above step. A forward recursion
on the trellis is performed by computing
for each node in the trellis.
is the sum of
the previous alpha times the branch metric along each branch
from the two previous
nodes to the current node.
Backward metric unit- unit
The backward state probability being in each state of the
trellis at each time k, given
the knowledge of all the future received symbols, is recursively
calculated and stored.
The backward metric
is computed using equation 2.3 in the backward direction,
going from the end to the beginning of the trellis at time
instance k-1, given the
probabilities at time instance k.
(2.3)
where the state transition is from
. is computed for states 00, 01, 10 and 11 (refer
Fig 2.1 (d) ) in a 4 state decoder. In an 8 state decoder - 3GPP
version,
is computed
for states 000, 001, 010, 011, 100, 101, 110 and 111.
19
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
40/161
Backward metric computation can start only after the completion
of the computation
by the
unit. Observing the trellis diagram, there are four
values to be computed,
but now in backward order, from [N-1 down to 0]. The four
values are
,
,
,
utilizing
values and the initialized
values for index k equal
to N-1. A backward recursion on the trellis is performed by
computing
for each
node in the trellis. The computation is the same as for
, but starting at the end of
the trellis and going in the reverse direction.
Log likelihood ratio llr unit
Log likelihood ratio llr is the output of the turbo decoder.
This output llr for each
symbol at time k is calculated as
llr[k-1]
(2.4)
where numerator is summation over all the states
to
in
and input message bit
= 1. The denominator is summation over all the states to in
and input
message bit
= 0.
The
values,
unit output and the
values obtained from the above steps are used
to compute the llr values. The main operations are comparison,
addition and sub-
traction. Finally, these values are de-interleaved at the second
decoder output, after
the required number of iterations to make the hard decision, in
order to retrieve the
information that is transmitted. The log likelihood ratio llr[k]
for each kis computed.
The llr is a convenient measure since it encapsulates both the
soft and hard bit in-
formation in one number. The sign of the number corresponds to
the hard decision
while the magnitude gives a reliability estimate.
Extrinsic unit
Compute the extrinsic information that is to be fed to the next
decoder in the iteration
20
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
41/161
sequence. This is the llr minus the input probability estimate.
Extrinsic informa-
tion
is obtained from the log likelihood ratio llr[k-1] by
subtracting the
weighted channel systematic bits and the information fed from
the other decoder.
Extrinsic information computation uses the llr outputs, the
systematic bits and the
apriori information to compute the extrinsic value. This is the
value that is fed back
to the other decoder as the apriori information.
This sequence of computations is repeated for each iteration by
each of the two de-
coders. After all iterations are complete, the decoded
information bits can be retrieved by
simply looking at the sign bit of the llr: if it is positive the
bit is a one, if it is negative
the bit is a zero. This is because the llr is defined to be the
logarithm of the ratio of the
probability that the bit is a one to the probability that the
bit is a zero. There are a number
of references in which one can find the complete derivations
equations for the MAP turbo
decoding algorithm [38, 61, 40, 39].
2.4 Experimental set up
To study the effects of varying various parameters on the BER,
the C version of the appli-
cation is developed during the SW solution of the
application.
To compare the performance of four state turbo code and eight
state (3GPP) turbo
code, the floating point version of 3GPP turbo code is
developed. It assists in observ-
ing the effect of the type of encoder design used in each
case.
A floating point version of the four state turbo encoder and the
decoder is developed.
This helps us to obtain the BER for various signal to noise
ratio and test its function-
ality. The test bench modeled during the application
characterization is used during
hardware solution of the design later.
Effects of varying application parameters (frame length and
iterations) are assessed
21
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
42/161
using the developed C model. These are used later to correlate
BER vs area/power
due to architectural optimization.
To study the effect of quantization, the fixed point version of
the four state and the
eight state turbo code is developed. The word length effects of
various data elements
in the design on BER can be observed using the fixed point
model. This helps in
fixing the bit-width of the input parameters of the decoder to
be used during the
architectural optimization (bit-width analysis).
To compare the results of different interleaver designs, a
module for the random
interleaver and the RC symmetric interleaver was developed.
These versions were
used to compare our result with the work of other researchers in
the turbo coding
area.
2.5 Simulation Results
Different parameters which affect the performance of turbo codes
are considered. Some of
these parameters are:
The size of the input message (Frame-length).
The number of decoding iterations.
The type of the encoder used (4 state vs 8 state encoder).
Effect of interleaver design.
Word-length optimization (Quantization effects).
All our results presented in this section consider turbo codes
over the additive white
Gaussian noise (AWGN) channel.
22
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
43/161
10-5
10-4
10-3
10-2
10-1
100
0 0.5 1 1.5 2 2.5
BER
SNR Eb/No
Effects of varying the framesize on BER (eight state)
N = 128N = 256
N = 1024N = 2048N = 4096
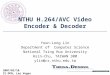
Figure 2.4: Impact on performance for different frame-length
used, simulated for six itera-tions varying the SNR.
23
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
44/161
2.5.1 Effect of varying frame-length on code performance
The increase in the size of the input frame length has an impact
on the interleaver size.
When the size of the interleaver increases it adds to the
complexity of the design. It in-
creases the decoding latency and the power consumption.
Figure 2.4 depicts how the performance of the turbo codes
depends on the frame-length
N used in the encoder. It can be seen that, there is a clear
trend in the performance of the
turbo codes when the frame-length increases. The codes exhibit a
better performance for
increase in the frame-length. This is in accordance with various
other published literature.
Since our goal is to develop a low power framework for this
application specific design,
the algorithmic study on the impact of vary N is essential. This
assists in the power per-
formance trade-off studies, when the design is ported to ASIC or
FPGA solution. Next the
effect of varying the number of iterations in the turbo codes is
considered.
2.5.2 Effect of varying number of iterations on performance
Effect of varying the number of iterations during the decoding
process is an interesting
observation in system level studies. Increasing the number of
iterations should give a per-
formance improvement, but at the expense of added complexity.
The latency of obtaining
the decision output after completion of the decoding will
increase. This will also have an
impact on the power consumption when the design is considered at
the implementation
level. As seen from Figure 2.5, going from one iteration, which
was the case of no feed-
back, to the case of 3 iterations, a substantial gain in SNR for
a given BER was obtained.
In our study it is inferred that around four to six iterations
are sufficient in most cases. The
number of iterations have been fixed as six in our all our
experiments, unless otherwise
stated. These observations agree with the results from [63].
Feedback drives the decision
progressively further in one particular direction, which is an
improvement over the previous
iteration. The extent of growth slows down as iterations
increase.
24
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
45/161
10-5
10-4
10-3
10-2
10-1
100
0 0.5 1 1.5 2 2.5
BER
SNR Eb/No (1024 bit interleaver)
3GPP N=1024 Varying the number of iterations
6 iterations5 iterations1 iteration
Figure 2.5: Impact on performance for varying number of
iterations, N =1024, 8 state turbocode
25
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
46/161
2.5.3 4 state vs 8 state (3GPP) turbo decoder performance
Figure 2.6 shows the performance of the turbo decoder using 4
state version and the 8 state
(3GPP) version. For comparison, the 4 state floating point model
and the 3GPP floating
point model was used, simulated under the same conditions of
AWGN channel. Third gen-
eration partnership project (3GPP) has recommended turbo coding
as the defacto standard
in the 3G standards due to its better performance.
The performance of the four state vs the eight state turbo codes
is compared. In all of
the simulated cases, 8-state (3GPP) outperforms 4-state turbo
codes. The gains obtained by
8-state with 6 iterations with respect to 4-state with 6
iterations show a difference of almost
one order of magnitude for a 1024 bit interleaver. The
performance of the 8 state turbo
codes is better than the 4 state, primarily as a result of
superior weight distribution of the 8
state turbo codes. Furthermore 8-state PCCC with i iterations is
approximately equivalent
to 4-state SCCC with 3i/2 iterations in terms of computational
cost, gate count and power
consumption [64].
2.5.4 Interleaver design considerations
The performance of the turbo codes is dependent on different
parameters like the frame-
length, number of iterations, selection of different encoders
and use of different inter-
leavers. Interleaving is basically the rearrangement of the
incoming bit stream in some
order specified by the interleaver module.
Random interleavers
A random interleaver is based on random permutation . For large
values of N, most
random interleavers utilized in turbo codes perform well. As the
interleaver block size
increases, the performance of a turbo code improves
substantially. The method to generate
a random interleaver is as follows:
Generate an interleaver array of size N. Input to this array is
the information bit
stream of frame-length N.
26
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
47/161
10-5
10-4
10-3
10-2
10-1
100
0 0.5 1 1.5 2 2.5
BER
SNR Eb/No (4 state vs 3GPP 1024 bit six iterations)
Comparison of 8 state(3GPP) and 4 state Turbo code
3GPP - 8 state4state
Figure 2.6: Comparing 4 state and the 8 state turbo code
(floating point version), N = 1024,RC symmetric interleaver, six
iterations.
27
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
48/161
Generate a random number array of size N.
Use the random number array as the index to rearrange the
position of the bits in the
interleaver array to obtain the new interleaved array.
To verify the turbo code functionality and to compare it with
similar work conducted
by other researchers, a turbo coding system using a random
interleaver was also developed.
This model forms the basis for comparison with the simulated
performance of Bruces work
[61]. Interleaver size N = 1024, 4 state turbo coding and six
iterations are used in both the
cases in order to have a fair comparison. Our results tally with
their model. The results are
shown in Figure 2.7 with bit error rate (BER) on the y axis and
signal-to-noise in dB on the
x axis.
RC symmetric interleaver
A symmetric interleaver is used in the remaining experiments of
our work. The interleaver
size is N, which is also the frame-length size of the
information that is handled. The inter-
leaver is arranged in the form of a matrix with specified rows
and columns. The possible
interleaver configuration can be N = 128 with 4 rows and 32
columns, or N = 32 with 4
rows and 8 columns. The scrambling of the bit positions is done
as follows and the diagram
is shown in Fig 2.8
Conceptually bits are written into a two dimensional matrix
row-wise. The row inter-
leaving is done first followed by the column interleaving to
obtain the intereaved data. The
rows are shuffled according to a bit-reversal rule and the
elements within each row are per-
muted according to the bit-reversal procedure again.The
deinterleaving is also done in the
same way, since this is a symmetric interleaver. Consider the
row interleaving where num-
ber of rows is 4. The row numbers areR[0,1,2,3]. Its binary
equivalent
.
After bit reversal binary
which is R[0,2,1,3]. Elements in row zero
and three are kept as it is, the elements in rows one and two
are interchanged.
Before interleaving can commence it is essential that all the
data elements are present.
The advantage of using symmetric interleaver is that the same
interleaver can be used for
28
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
49/161
10-4
10-3
10-2
10-1
100
0 0.5 1 1.5 2 2.5
BER
SNR Eb/No (1024 bit random interleaver design and six
iterations)
Comparison of Our work and Bruce 4 state Turbo code
Our workBruce
Figure 2.7: Random interleaver design - Our work with Bruces 4
state turbo code [61]
29
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
50/161
...............
elements arranged
in the matrix form.
Row 0
Row 1Row 2
Row 3
Col0
Col31
Step1 : Take the input message of 128 and arrange it in 4 rows
and 32 columns.
Step 2 : Perform Row interchange. Use bit reversal algorithm to
get the pattern
of the row interchanging. Eg Row 1 means binary 01 . Its bit
reversal is
10 which is Row 2. Interchange the row elements.Step 3 : Column
Interleaving. Bit reversal algorithm is used for the column
numbers also. After row interleaving, column interleaving is
done.
Figure 2.8: Illustration of interleaving the data elements
30
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
51/161
deinterleaving also. A disadvantage of random interleavers is
that it requires different in-
terleave and deinterleave unit with separate hardware and lookup
tables. It is shown in [41]
that although the random interleavers give good performance,
symmetric interleavers in no
way degrade the performance of the turbo coding system.
Our turbo encoder/decoder simulation is compared with the
results published by other
independent researchers. Our simulation results after six
iterations are shown in Figure
2.9, together with the results simulated by Mark Ho et al. [41].
There is some difference
in BER and it can be attributed due to the different symmetric
interleavers used in both the
cases. In [41] S-symmetric interleaver is used. RC-symmetric
interleaver is used in our
simulations.
2.5.5 Effect of Quantization
Next, the effect of quantization on the performance of the turbo
decoder is studied. Floating
point computations are first converted to fixed point
computations by the use of quantizers.
Experiments are conducted to compare the impact on performance
using floating point
version of the turbo code and the fixed point version of the
turbo code. Since it is planned
to use this application further for architectural analysis, on
chip memory exploration and
the FPGA implementation study, this step is a pre-requisite.
Further, to investigate the word
length effects on power consumption the fixed point
implementation study is needed. The
performance of the turbo code for bit width of 32 (integer), 6
bit and 4 bit quantization is
simulated.
Numerical precision has an impact on the performance in terms of
the bit error rate
of the turbo codes which is shown in Fig 2.10. It can be
observed that the floating point
implementation would have better performance than the fixed
point implementation. How-
ever, this will increase the complexity of the implementation
for floating point case, when
compared to the fixed point case. Hence, fixed point precision
is a preferred choice. Now,
in fixed point implementation, it is interesting to observe the
word length requirement of
the input data to the decoder (output of the channel estimates).
In the same Figure 2.10,
31
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
52/161
10-3
10-2
10-1
100
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
BER
SNR Eb/No (4state N=1024 bit, six iterations)
Comparison using symmteric interleaver, N=1024
Our WorkMark Ho
Figure 2.9: Comparing our work with Mark Hos [41] using a
symmetric interleaver
32
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
53/161
10-5
10-4
10-3
10-2
10-1
100
0 0.5 1 1.5 2 2.5
BER
SNR Eb/No (dB) (Varying the quantization bits)
Effects of Quantization on BER N = 4096
floating pointfixed point
6 bit quantization4 bit quantization
Figure 2.10: Impact of word length variation on bit error rate
of the turbo codes
33
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
54/161
comparison of various bit width is depicted. Observing the
performance of the turbo codes
with bit width six, the performance is very close to the fixed
point (32 bit width) perfor-
mance. Hence bit width of six could be an appropriate choice for
the input data bit width.
Coming to the comparison of bit width variation from six to
four, it is observed that the
there is a degradation of performance of the turbo codes,
indicating that four bit width is
not a good choice. These observations tally with other published
literature on quantization
effects [65].
2.6 Summary
In this chapter, some applications of turbo codes are discussed
in the beginning to get an
insight into the different areas of its utility. The
applications are characterized and the
operational details of the turbo coding application are studied.
The algorithmic details of
the turbo encoder and the decoder are presented next, which
enables one to understand the
operational flow of the application. BER is a measure of the
performance of the turbo codes
for different signal to noise ratios. The impact on the BER for
the varying parameters are
studied. Experimental set up and the results are presented for
effect of number of iterations
and effect of the frame length. The study on the effect of type
of encoder (4 state vs 8
state(3GPP)) shows that the 3GPP version has better performance
than the four state turbo
decoder as expected. Our results are compared with those
published in literature. The
effect of quantization on the BER is also studied. The C
simulation models constructed are
used to test the functional correctness.
34
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
55/161
Chapter 3
On chip Memory Exploration
3.1 Introduction
Processor-based information processing can be used conveniently
in many embedded sys-
tems. Embedded systems themselves have been evolving in
complexity over the years.
From simple 4-bit and 8-bit processors in the 70s and 80s for
simple controller appli-
cations, the trend is towards use of 16-bit as well as 32-bit
processors for more complex
applications involving audio and video processing. The detailed
architecture of such sys-
tems is very much application driven to meet power and
performance requirements. In
particular, this applies to the memory architecture, since
memory does have a major impact
on the overall performance and the power consumption.
In this chapter the effect of different options that exist for
the implementation of mem-
ory architectures is analyzed and alternatives to on-chip cache
realization explored. The
performance and energy consumption when using scratch pad memory
(SPM) vis-a-vis
cache as on-chip memory alternatives is compared. This is
because memory requirements
in the application programs have increased. This is specially
true in digital signal pro-
cessing, multimedia applications and wireless mobile
applications. This also happens to
be a major bottleneck, since a large memory implies slower
access time to a given mem-
ory element, higher power dissipation and more silicon area.
Memory hierarchy consists
35
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
56/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
57/161
3.2 Related Work
Recently, interest has been focused on having on-chip scratch
pad memory to reduce power
consumption and improve performance. Scratch pad memories are
considerably more en-
ergy and area efficient than caches. On the other hand, they can
replace caches only if
they are supported by an effective compiler. The mapping of
memory elements of the ap-
plication benchmarks to the scratch pad memory can be done only
for data [70], only for
instructions [71] or for both data and instructions [72, 73].
Current embedded processors
particularly in the area of multimedia applications and graphics
controllers have on-chip
scratch pad memories. Panda et.al [70] associate the use of
scratch pad memory with data
organization and demonstrate its effectiveness. Benini et.al
[74] focus on memory synthe-
sis for low power embedded systems. They map the frequently
accessed locations onto
a small application specific memory. Most of these works address
only the performance
issues.
Focusing on energy consumption it is shown that scratch pad
memory can be used as
a preferable design alternative to the cache for on-chip memory.
To complete the trade-off
area model for the cache and scratch pad memory is developed. It
is concluded that scratch
pad memory occupies less silicon area.
3.3 Scratch pad memory as a design alternative to cache
memory
In this section experiments on DSPstone benchmarks using the
methodology developed
to show that SPM is more energy efficient than the traditional
on-chip cache memory are
conducted.
37
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
58/161
Address
Word lines
Column Muxes
OutputDrivers
Comparators
Sense amplifiers
Output OutputDriver Driver
Data Output
DriversMux
Input
Decoder
Valid output
Tagarray
Dataarra
y
Bitlines
Word lines
Bitlines
Sense amplifiers
Column Muxes
Figure 3.1: Cache Memory organization [75]
3.3.1 Cache memory
The basic organization of the cache is taken from [75] and is
shown in Fig. 3.1. The
decoder first decodes the address and selects the appropriate
row by driving one wordline
in the data array and one wordline in the tag array. The
information read from the tag array
is compared to the tag bits of the address. The results of
comparisons are used to drive a
valid (hit/miss) output as well as to drive the output
multiplexers. These output multiplexers
select the proper data from the data array and drive the
selected data out of the cache.
The area model used in our work is based on the transistor count
in the circuitry. All
38
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
59/161
transistor counts are computed from the designs of circuits.
From the organization shown
in Fig. 3.1, the area of the cache (Ac) is the sum of the area
occupied by the tag array (
)
and data array (
).
(3.1)
and
is computed using the area of its components.
(3.2)
where , , , , , and is the area of the tag decoder unit, tag
ar-
ray, column multiplexer, the pre-charge, sense amplifiers, tag
comparators and multiplexer
driver units respectively.
(3.3)
where , ,
, ,
,
is the area of the data decoder unit, data array,
column multiplexer, pre-charge, data sense amplifiers and the
output driver units respec-
tively. The estimation of power can be done at different levels,
from the transistor level
to the architectural level [30]. In CACTI [75], transistor level
power estimation is done.
The energy consumption per access in a cache is the sum of
energy consumptions of all the
components identified above. It is assumed that the cache is a
write through cache. There
are four cases of cache access that are considered in our model.
Table 3.1 lists the accesses
required in each of four possible cases i.e. read hit, read
miss, write hit and write miss.
Access type ! % & % & !
Read hit 1 0 0 0
Read miss 1 L L 0
Write hit 0 1 0 1
Write miss 1 0 0 1
Table 3.1: Cache memory interaction model
39
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
60/161
Cache read hit : When the CPU requires some data, the tag array
of the cache is
accessed. If there is a cache read hit, then data is read from
the cache. No write to
the cache is done and main memory is not accessed for a read or
write. (row 2 - table
3.1)
Cache read miss : When there is a cache read miss, it implies
that the data is not in
the cache and the line has to be brought from main memory to
cache. In this case,
there is a cache read operation, followed by L words to be
written in the cache, where
L is the line size. Hence there will be a main memory read event
of size L with no
main memory write. (row 3 - table 3.1)
Cache write hit : If there is a cache write hit, there is a
cache write followed by a
main memory write as this is a write through cache. (row 4 -
table 3.1)
Cache write miss : In case of a cache write miss, a cache tag
read (to establish the
miss) is followed by the main memory write. There is no cache
update in this case.
For simplicity, tag read access from cache read of tag and data
are not distinguished.
The cache is a write through cache. (row 5 - table 3.1)
Using this model the cache energy equation is derived as
!
(3.4)
Where
is the energy spent in cache.
is the number of cache read accesses
and
!
is the number of cache write accesses. Energy E is computed
using equation
(3.7).
3.3.2 Scratch pad memory
The scratch pad is a memory array with the decoding and the
column circuitry logic. This
model is designed keeping in view that the memory objects are
mapped to the scratch pad
in the last stage of the compiler. The assumption here is that
the scratch pad memory
40
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
61/161
oVdd Vdd
Word select
bit bit_bar
(c)
(a)
(b) Six Transistor Static RAM
Memory array
Memory Cell
Word Select
bit_barbit
Figure 3.2: Scratch pad memory array
occupies one distinct part of the memory address space with the
rest of the space occupied
by main memory. Thus, the availability of the data/instruction
in the scratch pad need not
be checked. It reduces the comparator and the signal miss/hit
acknowledging circuitry.
This contributes to the energy as well as area reduction.
The scratch pad memory array cell is shown in Fig. 3.2(a) and
the memory cell in 3.2(b).
The 6 transistor static RAM cell [75, 2] is shown in Fig 3.2(c).
The cell has one R/W
port. Each cell has two bit-lines, bit and bit bar, and one
word-line.The complete scratch
pad organization is as shown in Fig. 3.3. From the organization
shown in Fig. 3.3, the area
of the scratch pad is the sum of the area occupied by the
decoder, data array and the column
circuit. Let
be the area of the scratch pad memory.
(3.5)
where
,
,
,
,
and
is the area of the data decoder, data array
area, column multiplexer, pre-charge, data sense amplifiers and
the output driver units re-
spectively. The scratch pad memory energy consumption can be
estimated from the energy
consumption of its components i.e. decoder
and memory columns
.
41
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
62/161
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
63/161
cycle[124].
! (3.8)
is computed from equation (3.8). It is the sum of the
capacitances due to pre-
charge and read access to the scratch pad memory. is the
effective load capacitance of
the bit-lines during pre-charging and ! is the effective load
capacitance of the cell
read/write.
is the number of columns in the memory.
In the preparation for an access, bit-lines are pre-charged and
during actual read/write,
one side of the bit lines are pulled down. Energy is therefore
dissipated in the bit-lines due
to pre-charging and the read/write access. When the scratch pad
memory is accessed, the
address decoder first decodes the address bits to find the
desired row. The transition in the
address bits causes the charging and discharging of capacitances
in the decoder path. This
brings about energy dissipation in the decoder path. The
transition in the last stage, that is
the word-line driver stage triggers the switching in the
word-line. Regardless of how many
address bits change, only two word-lines among all will be
switched. One will be logic 0
and the other will be logic 1. The equations are derived based
on [75].
(3.9)
where
is the total energy spent in the scratch pad memory. In case of
a scratch
pad as contrast to cache, events due to write miss and read miss
are not there. The only
possible case that holds good is the read or write access.
is the number of accesses
to the scratch pad memory.
is the energy per access obtained from our analytical
scratch pad model.
43
-
8/14/2019 A LOWPOWER DESIGN METHODOLOGY FOR TURBO ENCODER AND
DECODER
64/161
3.3.3 Estimation of Energy and Performance
As the scratch pad is assumed to occupy part of the total memory
address space, from the
address values obtained by the trace analyzer, the access is
classified as going to scratch
pad or main memory and an appropriate latency is added to the
overall program delay. One
cycle is assumed if it is a scratch pad read or write access.
For main memory, two modes of
access - 16 bits and 32 bits are considered. The modes and
latencies are based on an ARM
processor with thumb instruction set which has been used for our
experimentation. This is
because for processors designed for energy sensitive
applications, multiple access modes
are provided. If it is a main memory 16 bit access is one cycle
plus 1 wait state (refer to
Table 3.2 ). If it is a main memory 32 bit access then, it is
one cycle plus 3 wait states.
The total time in number of clock cycles is used to determine
the performance. The scratch
pad energy consumption is the number of accesses multiplied by
the energy per access as
described in equation 3.9.
Access Number of cycles
Cache Using Table 3.1
Scratch pad 1 cycle
Main Memory 16 bit 1 cycle + 1 wait stateMain Memory 32 bit 1
cycle + 3 wait states
Table 3.2: Memory access cycles
The special compiler support required in SPM address space
allocation is to identify
the data