Embed Size (px)
Citation preview

ARTICLE IN PRESS
Contents lists available at ScienceDirect
Int. J. Production Economics
Int. J. Production Economics 122 (2009) 703–713
0925-52
doi:10.1
� Cor
E-m
rabinjan
journal homepage: www.elsevier.com/locate/ijpe
A hybrid genetic algorithm model for transshipmentmanagement decisions
Dinesh K. Sharma a,�, R.K. Jana b
a Department of Business, Management and Accounting, University of Maryland Eastern Shore, Princess Anne, MD 21853, USAb Indian Institute of Social Welfare and Business Management, Kolkata, India
a r t i c l e i n f o
Article history:
Received 18 September 2008
Accepted 26 June 2009Available online 8 July 2009
Keywords:
Transshipment planning
Genetic algorithm
Multiobjective programming
Fuzzy goal programming
73/$ - see front matter & 2009 Elsevier B.V. A
016/j.ijpe.2009.06.036
responding author. Tel.: +1410 6516528; fax:
ail addresses: [email protected] (D.K. Shar
[email protected] (R.K. Jana).
a b s t r a c t
Transshipment is a critical area of supply chain management that may lead to cost
reductions and improved services for companies to make greater profits and to become
more competitive. In this study, we present a transshipment planning model for the
petroleum refinery industry. The main objective of the model is to minimize the total
transshipment cost, maximize production, satisfy storage requirements at depots and
meet the demand for oil in these sales areas. To accommodate imprecision, the goals are
defined in a fuzzy sense and a fuzzy goal programming (FGP) model is developed. To
provide flexibility to the decision-maker, we integrate a genetic algorithm (GA) within
the FGP framework in such a way that it can find solutions for different sets of target and
tolerance values of the goals in a single run. A case example is presented to demonstrate
the usefulness of the integrated technique.
& 2009 Elsevier B.V. All rights reserved.
1. Introduction
In recent years, with globalization, increasing competi-tiveness, and ever-increasing customer expectations,organizations have recognized that supply chain manage-ment (SCM) is vital for improving performance in today’sbusiness environment. Consequently, management faceschallenges to find better ways to deliver products tocustomers in a cost-effective manner. To remain compe-titive and enhance firms’ profitability, respective supplychains or networks must be effectively managed. Trans-shipment is one of the critical areas of SCM that has greatpotential for reducing total transportation costs andimproving services. It deals with the problem of supplyinggoods or products through intermediate points whilegoing from original sources to final destinations. Thesources may include plants and warehouses, and destina-
ll rights reserved.
+1410 6516529.
ma),
tions may include sales outlets and customers. Severaltechniques have been reported in the operations researchliterature for solving transshipment problems. Amongthem, transportation algorithms, linear programming andgeneralized minimum cost networks (Hemaida and Kwak,1994) were very popular in the earlier days. The objectiveof all these techniques is to minimize the total transporta-tion cost. The main disadvantage of these techniques isthat they can only handle one objective function. Inpractice, cost optimization cannot be the only objective ofmanagement. Businesses are faced with problems otherthan economic optimization where management has toplace high priority on noneconomic items that are vital tothe existence of their firms (Lee and Moore, 1973).
Goal programming (GP) techniques provide an analyticalframework for dealing with problems involving multiple andconflicting objectives within the linear programming frame-work. GP provides a satisfactory solution which comes closestto meet the stated goals while satisfying the constraints ofthe problem. Charnes and Cooper (1961) proposed thistechnique. GP and its variants have been applied to solvedifferent types of multiobjective programming problems

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713704
(Tamiz et al., 1998). It has also been applied to a number oftransshipment decision problems. Lee and Moore (1973) useda GP model for solving transportation problem with multipleand conflicting objectives. Moore et al. (1978) presented ananalysis of a transshipment problem with multiple conflictingobjectives. Hemaida and Kwak (1994) used a linear GP modelwith flexible supply and demand constraints for solvingtransshipment problems. Sharma et al. (2003) developed aGP model with three sided penalty functions for managementdecision-making for transshipment problems. They demon-strated the model by applying it to the problem of petroleumrefinery industry.
The conventional GP techniques mentioned earlier areapplicable for solving deterministic multiobjective pro-blems in which the parameter values are definedprecisely. Unfortunately, these techniques are not suitablefor solving many real-world transshipment planningproblems in which uncertainty is an inherent character-istic. Therefore, the values of some parameters of theseproblems may not be known precisely. For successfullyhandling such problems, the objectives and/or constraintsare defined in a ‘fuzzy’ sense. In the literature, severalauthors have applied fuzzy programming (FP) techniquesto solve multiobjective transportation problems (Bit et al.,1992; Li and Lai, 2000; Abd El-Wahed, 2001; Liu and Kao2004).
Tamiz et al. (1998) identified certain disadvantages ofGP techniques while Li and Lai (2000) and Abd El-Wahed(2001) identified others for FP techniques. Narasimhan(1980) pioneered the work on fuzzy goal programming(FGP) to overcome these shortcomings. This field wasfurther enriched by Rubin and Narasimhan (1984), Tiwariet al. (1987), Chen and Tsai (2001), and others. FGP hasbeen applied successfully to different real-world decision-making problems. Unfortunately, it has not been exploredmuch in the field of transshipment planning problems. Inthe recent years, Abd El-Wahed and Lee (2006) developedan interactive FGP approach to obtain a compromisesolution to multiobjective transportation problems. Theyconsidered the imprecise nature of the input data byimplementing the minimum operator and also assumedthat each objective function has a fuzzy goal. In thisinteractive approach, the problem needs to be evaluatediteratively until the decision-maker is satisfied.
It is well known in FGP that the decision-maker maynot always have high confidence in setting the target andtolerance values of goals. Therefore, to allow flexibility inthe decision-making process, it may be better to havemore than one set of target and tolerance values of goals.The existing FGP approaches can find solutions for a singleset of values of the target and tolerance of goals. If thedecision-maker wishes to find the solution for a differentset, then the FGP model must be reformulated andevaluated repeatedly for each set of target and tolerancevalues of the goals. For example, assume that the decision-maker has 10 sets of values of target and tolerance for his/her goals and wants to select his/her most preferredsolution(s). In this case, the model needs to be evaluatedten times separately. This leads to a huge computationalburden and requires a long time. To the best of ourknowledge, this issue is missing from the current FGP
literature. In this study, we focus on this particular issue offlexibility of the decision-making process.
To successfully implement the flexibility feature of thedecision-making process, an appropriate iterative searchscheme such as genetic algorithms (GA) is essential. GA isa population based iterative search technique, which iscapable of finding optimal or near optimal solutionsefficiently, and can be applied to a wide range ofdecision-making problems (Goldberg, 1989). In the litera-ture, Vignaux and Michalewicz (1991) used GA for a lineartransportation problem. Michalewicz et al. (1991) appliedGA to nonlinear transportation problems. Li et al. (1998)also proposed GA approach for solving solid TP. Recently,Sharma and Jana (2007) integrated GA and FGP technique,without the flexibility feature, for solving a nutrientmanagement problem. This motivates us to integrate GAand FGP technique for flexible decision-making. Thecombined mechanism is classified as a soft computingtechnique for flexible decision-making using the FGPframework.
In this study, a transshipment planning model isdeveloped for a petroleum refinery industry. The objectiveis to minimize the total transshipment costs, maximizeproduction of refined oil, satisfy storage requirements atdepots and meet demand of refined oil at the sales area. Toaccommodate the imprecision of the model, each objec-tive function is expressed as a fuzzy goal. Fuzzy goals arethen converted to their deterministic forms using thecorresponding membership functions and a deterministicmodel is obtained. We propose a hybrid genetic algorithm(GA). We integrate the GA within the FGP framework insuch a way that it can find solutions for different sets oftarget and tolerance values of the goals in a single run. Inother words, the decision-maker can specify differenttarget and tolerance values for different goals and findindependent decisions simultaneously. A case example ispresented to demonstrate the usefulness of the proposedtechnique.
The rest of the paper is organized as follows: Section 2describes a general FGP model. Section 3 introduces atransshipment planning model for the petroleum refineryindustry. Section 4 proposes a hybrid genetic algorithmapproach. Section 5 demonstrates a case study of theproposed technique. Section 6 presents results and relateddiscussions. Section 7 concludes the paper.
2. A FGP model
The general FGP model (Yaghoobi and Tamiz, 2007) canbe presented as follows:
Find x so as to satisfy
zkðxÞ\bk; k ¼ 1;2; . . . ; k1
zkðxÞtbk; k ¼ k1 þ 1; k1 þ 2; . . . ;K (2.1)
subject to
Ax � B
x � 0
where x is the vector of decision variables, bk is theaspiration level of the k-th goal constraint zkðxÞ ðk ¼

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713 705
1;2; . . . ;KÞ, ‘‘\’’ is the fuzzified version of ‘‘Z’’ and ‘‘t’’ isthe fuzzified version of ‘‘r’’. The k-th fuzzy goal of typezkðxÞ\bk indicates that the decision-maker will besatisfied for values slightly less than bk up to a giventolerance limit. Similarly, k-th fuzzy goal of type zkðxÞtbk
indicates that the decision-maker will be satisfied forvalues slightly over bk up to a given tolerance limit(Zimmermann, 1987).
Fuzzy goals are characterized by their membershipfunctions. They depend on the lower or upper tolerancelimit of the desired value of the goal. If tl
k be the lowertolerance limit for the achievement of the desired value bk
of zkðxÞ\bk then the corresponding membership functioncan be expressed as
mzkðxÞ ¼
1 if zkðxÞ � bk
zkðxÞ � ðbk � tlkÞ
tlk
if bk � tlk � zkðxÞobk
0 if zkðxÞobk � tlk
8>>>><>>>>:
(2.2)
Similarly, for the fuzzy goal zkðxÞtbk, if tuk be the upper
tolerance limit for the achievement of the desired value bk
then the corresponding membership function can beexpressed as
mzkðxÞ ¼
1 if zkðxÞ � bk
ðbk þ tuk Þ � zkðxÞ
tuk
if bkozkðxÞ � bk þ tuk
0 if zkðxÞ4bk þ tuk
8>>><>>>:
(2.3)
Figs. 1a and b demonstrate the membership functionscorresponding to two types of fuzzy goals.
If the fuzzy goal zkðxÞ\bk is completely satisfied thenthe membership value is unity and tolerance is zero.Otherwise, the tolerance will have a nonzero value andthe membership function value will belong to [0, 1]
1
1
bk
bk
(bk + tk )
(bk - tk)
zk (x)
zk (x)
�zk
�zk
u
l
Fig. 1. (a) Membership function of zk(x)tbk and (b) membership
function of zk(x)\bk.
(Narasimhan, 1980). If l�k ; k ¼ 1;2; . . . ; k1 is the member-ship function value, then following (2.2) we write
l�k �zkðxÞ � ðbk � tl
kÞ
tlk
; k ¼ 1;2; . . . ; k1 (2.4)
Following similar arguments, we get for the fuzzy goalzkðxÞtbk:
lþk �ðbk þ tu
kÞ � zkðxÞ
tuk
; k ¼ k1 þ 1; k1 þ 2; . . . ;K (2.5)
where lþk ; ðk ¼ k1 þ 1; k1 þ 2; . . . ;KÞ is the membershipfunction value. Then the FGP model can be defined as
max :Xk1
k¼1
l�k þXK
k¼k1þ1
lþk
subject to
l�k �zkðxÞ � ðbk � tl
kÞ
tlk
; k ¼ 1;2; . . . ; k1
lþk �ðbk þ tu
kÞ � zkðxÞ
tuk
; k ¼ k1 þ 1; k1 þ 2; . . . ;K
Ax � B; 0 � lþk ; l�k � 1; x � 0 (2.6)
where ftl1; t
l2; . . . ; t
lk1; tu
k1þ1; tuk1þ2; . . . ; t
uKg has different set of
values depending on the decision-maker’s preferences.
3. Transshipment planning model for the petroleumrefinery industry
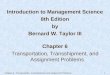
In this section, we develop a transshipment planningmodel for the petroleum refinery industry. For such aproblem, the refined oil is first transported from differentrefinery locations to depots. This is generally done byusing pipelines. Then, using rail and over-the-roadtankers, the oil is transported from the depots to differentsales areas (Fig. 2).
3.1. Notations
The notations used to formulate the transshipmentplanning model for the petroleum refinery industry isdefined below:
xr amount of refined oil produced at refineryr ðr ¼ 1;2; . . . ;RÞ, a decision variable
yrd amount of refined oil shipped from refineryr ðr ¼ 1;2; . . . ;RÞ to depot d ðd ¼ 1;2; . . . ;DÞ, adecision variable
zds amount of refined oil received at sales area s ðs ¼
1;2; . . . ; SÞ from depot d ðd ¼ 1;2; . . . ;DÞ, a deci-sion variable
Pr production capacity of refinery r ðr ¼ 1;2; . . . ;RÞCrd unit shipping cost of refined oil from refinery
r ðr ¼ 1;2; . . . ;RÞ to depot d ðd ¼ 1;2; . . . ;DÞC̄ds unit shipping cost of refined oil from depot
d ðd ¼ 1;2; . . . ;DÞ to sales area s ðs ¼ 1;2; . . . ; SÞLD
d minimum amount of refined oil stored at depotd ðd ¼ 1;2; . . . ;DÞ
Lld tolerance of LD
d , ðd ¼ 1;2; . . . ;DÞ

ARTICLE IN PRESS
REFINERIES
PIPE LINES
DEPOTS
RAIL & OVER-THE-ROAD TANKERS
SALES AREAS
Fig. 2. A general transshipment model for petroleum refinery industry.
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713706
C total costs of refined oil shipped from refineriesto depots
Cu tolerance limit of C
SDd maximum storage capacity of depot d ðd ¼
1;2; . . . ;DÞDD
d demand of refined oil at depot d ðd ¼ 1;2; . . . ;DÞDl tolerance of sum of demand of refined oil from
all depotsLS
s lower limit of demand of refined oil at sales areas ðs ¼ 1;2; . . . ; SÞ
Lus tolerance of LS
s ðs ¼ 1;2; . . . ; SÞUS
s upper limit of demand of refined oil at sales areas ðs ¼ 1;2; . . . ; SÞ
Uus tolerance of US
s ðs ¼ 1;2; . . . ; SÞ
3.2. Goals of the model
For developing the transshipment planning model forthe petroleum refinery industry, the following goals areconsidered:
(i)
Transshipment costs: Total transshipment costs for thewhole process must be minimized. This includes theshipping cost of refined oil from refineries to depotsand from depots to sales areas. This goal can beexpressed as follows:XR
r¼1
XD
d¼1
Crdyrd þXD
d¼1
XS
s¼1
C̄dszdstC (3.1)
(ii)
Production limit: This goal is concerned with theproduction capacity of the refineries which is gen-erally maximized. To avoid the uncertainty in avail-ability of refined oil and meet the demand, asufficient amount of refined oil must be produced.An approximate estimate of this production limit canbe made from the demands of all the depots. From thisview point, the production goal can be presented as
XR
r¼1
xr\
XD
d¼1
DDd (3.2)
(iii)
Oil storage at depots: At each sales area, there is somedemand of refined oil. This demand depends on therequirements of customers of that area. If there is norefined oil stored in the depots then there may be apossibility of crises of refined oil in some sales areas.To avoid this uncertainty, a minimum amount ofrefined oil must be stored in each depot. The goal canbe expressed asXR
r¼1
yrd �XS
s¼1
zds
!\LD
d ; d ¼ 1;2; . . . ;D (3.3)
(iv)
Demand of oil at sales area: The oil supplied fromdepots should meet the demand of refined oil at thesales area. The goal for maximum demand can bepresented asXD
d¼1
zdstUSs ; s ¼ 1;2; . . . ; S (3.4a)
Similarly, the goal for minimum demand can bepresented as
XD
d¼1
zds\LSs ; s ¼ 1;2; . . . ; S (3.4b)
3.3. Constraints
(a)
Production capacity: The amount of refined oil pro-duced at the refinery must be less than or equal to the
ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713 707
maximum production capacity of the refinery. So,
xr � Pr ; r ¼ 1;2; . . . ;R (3.5)
(b)
Capacity of depots: Each depot has some specificcapacity. The refined oil supplied from refineries tothe depot and the minimum amount of oil stored inthe depots must be less than their desired capacities.As a result,XR
r¼1
yrd þ LDd � SD
d ; d ¼ 1;2; . . . ;D (3.6)
(c)
Supply of refined oil from refineries to depots: The oilrefined at the refineries must be shipped to thedepots.XD
d¼1
yrd ¼ xr ; r ¼ 1;2; . . . ;R (3.7)
3.4. FGP model
Following the FGP model (2.6), the transshipmentplanning model for the petroleum industry can beformulated as
max : lCþ lP
þXD
d¼1
lDd þ
XS
s¼1
lþs þXS
s¼1
l�s
!(3.8)
subject to
lC�ðC þ Cu
Þ � ðPR
r¼1
PDd¼1Crdyrd þ
PDd¼1
PSs¼1C̄dszdsÞ
Cu
(3.9)
lP�
PRr¼1xr � ð
PDd¼1DD
d � DlÞ
Dl(3.10)
lDd �ðPR
r¼1yrd �PS
s¼1zdsÞ � ðLDd � Ll
dÞ
Lld
; d ¼ 1;2; . . . ;D
(3.11)
lþs �ðUS
s þ Uus Þ �
PDd¼1zds
Uus
; s ¼ 1;2; . . . ; S (3.12)
l�s �PD
d¼1zds � ðLSs � Lu
s Þ
Lus
; s ¼ 1;2; . . . ; S (3.13)
xr � Pr ; r ¼ 1;2; . . . ;R (3.14)
XR
r¼1
yrd þ LDd � SD
d ; d ¼ 1;2; . . . ;D (3.15)
XD
d¼1
yrd ¼ xr ; r ¼ 1;2; . . . ;R (3.16)
0 � lC� 1; 0 � lP
� 1; 0 � lDd � 1; d ¼ 1;2; . . . ;D
(3.17)
0 � lþs ; l�s � 1; s ¼ 1;2; . . . ; S (3.18)
where for the decision-maker’s flexibility, the target andtolerance parameters of the above model have more thanone set of values. The goal here is to solve the FGP model(3.8)–(3.18) for different set of values of target andtolerance parameters simultaneously. For this purpose,we propose to use a hybrid GA. In the next section, theapproach is briefly described.
4. Proposed solution procedure
In this section, we describe the steps of the hybrid GAto solve the transshipment planning model (3.8)–(3.18)for the petroleum industry. The difference between theproposed procedure and the conventional GA is thatproposed procedure can solve the FGP model with multi-ple priorities in a single run while traditional modelcannot. In the hybrid GA, real coded chromosomes areused. Before going to the details of the GA, let us definethe important parameters as follows:
POPSIZE population sizei index for population sizeVi i-th set of individuals in the populationGEN number of generationsN number of decision variablespc probability of crossoverPm probability of mutationNext we describe the GA.
4.1. GA description
The steps of the GA are briefly described as follows:
4.1.1. Chromosome representation
According to our notations:
Vi ¼ fx1; . . . ; xR; y11; . . . ; yRD; z11; . . . ; zDS; lC ,
lP ; lD1 ; . . . ; l
DD; lþ
1 ; . . . ; lþ
S ;l�
1 ; . . . ; l�
S gi
is considered as the i-th chromosome. We use real codedrepresentation of the chromosomes. A chromosomerepresents a solution of the FGP model (3.8)–(3.18).Therefore, it satisfies the constraints of the model(3.9)–(3.18). If a chromosome does not satisfy theconstraints, then it is denoted as an ‘‘infeasible chromo-some’’. In the remaining part of the paper, we use the term‘‘chromosome’’ to represent a ‘‘feasible chromosome’’.
4.1.2. Initialization of population of chromosomes
The initial POPSIZE number of chromosomes in thepopulation is initialized by generating uniform randomnumbers. Corresponding to each decision variable, a pre-specified interval is defined and a uniform randomnumber is generated. The process continues until allchromosomes are feasible. The details of generatinguniform and other random numbers can be found inGentle (2004).

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713708
4.1.3. Evaluation function definition
Let f i ¼ evalðViÞ; i ¼ 1;2; . . . ; POPSIZE is the evaluationfunction corresponding to the i-th chromosome. In thisstudy, we use the objective function value as the measureof fitness of chromosomes in the population. Thechromosome (potential solution) having largest objectivefunction value is the fittest one in the population. This is agood choice as we are maximizing the objective functionin the FGP model of the transshipment planning problem.Therefore, we define the evaluation function as
f i ¼ evalðViÞ ¼ lCþ lP
þXD
d¼1
lDd þ
XS
s¼1
lþs þXS
s¼1
l�s
!i
,
i ¼ 1;2; . . . ; POPSIZE (3.19)
4.1.4. Selection procedure
The selection procedure of the new chromosomes inthe population is based on spinning the Roulette-wheel.For this purpose, we first calculate the fitness of eachchromosome of the population using (3.19). Then wecalculate the total fitness of all the chromosomes in thepopulation as F ¼
PPOPSIZEi¼1 f i. Finally, the fitness proportion
of each chromosome is calculated as (fi/F). According tothe Roulette-wheel selection process, the chromosomehaving greater (fi/F) ratio has more chance to be selectedin the new population.
Formulate the FGP Model (3.8)-(3.18)
Construct membership functions
Input K, P, target & tolerance of goals
k = 1
START
4.1.5. Crossover operation
In this study, we use arithmetic crossover operation.The crossover probability is defined before starting theexecution pc. We generate a uniform random numberrA[0, 1] and select a chromosome for crossover if r4pc. Fortwo selected chromosomes, the arithmetic crossoveroperation is applied. We repeat the process until all newchromosomes are feasible.
NO
YES
initialize()
evaluation (0)
i ≤ GEN?
Report the Solution
selection()
crossover ()k ≤ P?
k = k + 1
i = 1
i = i + 1
4.1.6. Mutation operation
The mutation operation helps to better explore thesearch domain by introducing random variations into thepopulation. Let the crossover probability be pm. Wegenerate a uniform random number rA[0, 1] and select achromosome for mutation if r4pm. We then generateanother uniform random number s within (0, 1). If so0.5,we generate a number d within (�1, 1). If s40.5, we setd ¼ 0 and generate a uniform random number t within (0,10). If t40.0001, we add t � d to the selected chromosomeand obtain the new chromosome. We then check thefeasibility of the obtained chromosome and repeat thewhole process until it is feasible.
YES
NO mutation()
evaluation(i)STOP
Fig. 3. Flowchart of proposed procedure.
4.1.7. Termination
The execution of the whole process terminates whenthe number of iterations reach the number of generationsGEN, specified in the process.
4.2. GA to solve FGP model with different set of target and
tolerance values of goals
Here, we briefly describe the proposed hybrid GAprocedure for solving FGP model with different set oftolerance values.
input K; // number of goalsP; // number of priority preferencesT[P][K]; // target values of goalst[P][K]; // tolerance values of goals
for k ¼ 1 to P do // priority loopfor g ¼ 1 to G do // goal loop
T[g] ¼ T[k][g];t[g] ¼ t[k][g];
endfor // end of goal loopinitialization();evaluation(0);
for i ¼ 1 to GEN do // generation loopselection();crossover();mutation();evaluation(i);
endfor // end of generation loopendfor // end of priority loop
The flowchart of the proposed procedure is presented inFig. 3.

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713 709
To demonstrate the use of proposed hybrid GA, thefollowing application of petroleum refinery industry isconsidered.
5. A case study
This study is based on a petroleum refinery company inIndia. The company is one of the leading companies inpetroleum refining and marketing, which processes crudeoil to produce petroleum products such as petrol, diesel,LPG, and kerosene. The company has two oil refinerieswith maximum production capacities of 50,000 metricton (MT) and 65,000 MT, respectively. The companytransports refined oil to 26 cities/locations (sales areas)in a region. The refined oil is transported from therefineries to the depots via pipelines and from the depotsto sales area via tankers over the highways and railways.
We considered three sets of target and tolerance values(preferences) for each goal of the model. The annual totalcost to transport oil from refineries to depots, and fromdepots to sales areas, and production target preferencesare presented in Table 1.
The cost involved in transporting refined oil from eachrefinery to different depots and consequently to differentsales areas, capacity of depots, minimum amount storageof refined oil and their respective tolerances are defined inTables (2–4).
6. Results and discussions
Using the data presented in the previous section, wesolve the FGP model (3.8)–(3.18) using the proposedhybrid GA. The GA is coded in C++. The parameter valuesare used as follows: POPSIZE ¼ 30, pc ¼ 0:3, pm ¼ 0:2,GEN ¼ 100,000. The solutions are obtained for all three
Table 1Target and tolerance values of cost (Rs. crorea) and production (MT).
Preference Target cost Cost
tolerance
Target
production
Production
tolerance
1 1.68 0.15 85,000 5000
2 1.80 0.18 96,000 5000
3 1.85 0.17 98,000 9000
a 1 crore rupees (Rs.) is equivalent to 10 millions.
Table 2Transportation cost (Rs.) from refineries (1–2) to depots (D1–D10), demands (M
(MT) of refined oil at depots, tolerances (1–3) for minimum storage (MT) at de
Refineries Depots
D1 D2 D3 D4 D5
1 41.00 145.10 147.90 124.00 272.
2 – 58.80 247.30 140.90 365
Demand 2267 270 5352 6533 11,8
Capacity 16,140 324 24,326 12,427 32,8
Min. Storage 112 15 280 332 595
Tolerance 1 10 2 20 28 42
Tolerance 2 20 5 25 30 45
Tolerance 3 15 3 18 25 40
sets of target and tolerance values of the goals in a singlerun of the proposed approach. All the inputs are simplyprovided in the form of a data file. We list solutionsseparately for each set of values of target and tolerance ofgoals.
6.1. Solution for target and tolerance set 1
By solving the model (3.8)–(3.18) based on data givenin Tables 1–4, the supplies of refined oil (MT) fromrefineries (xr , r ¼ 1, 2) to depots (yrd, r ¼ 1, 2;d ¼ 1;2; . . . ;10) and from depots to sales areas (zds,d ¼ 1;2; . . .10; s ¼ 1;2; . . .26) are obtained as follows forthe target and tolerance set 1:
x1 ¼ 50;000; x2 ¼ 41;881
y11 ¼ 16;028; y12 ¼ 0; y13 ¼ 15;037; y14 ¼ 0; y15 ¼ 0,
y16 ¼ 0; y17 ¼ 3990; y18 ¼ 0; y19 ¼ 14;945; y10 ¼ 0
y22 ¼ 309; y23 ¼ 496; y24 ¼ 12;095; y25 ¼ 751,
y26 ¼ 6838; y28 ¼ 9094; y2;10 ¼ 12;298
z11 ¼ 2925; z12 ¼ 7150; z13 ¼ 2280; z14 ¼ 0;
z15 ¼ 3561; z16 ¼ 0; z17 ¼ 0; z18 ¼ 0; z19 ¼ 0
z21 ¼ 0; z22 ¼ 0; z23 ¼ 0; z24 ¼ 0; z25 ¼ 295,
z26 ¼ 0; z27 ¼ 0; z28 ¼ 0; z29 ¼ 0
z31 ¼ 0; z32 ¼ 0; z33 ¼ 0; z34 ¼ 3420; z35 ¼ 545,
z36 ¼ 4500; z37 ¼ 1280; z38 ¼ 2068; z39 ¼ 3440
z4;10 ¼ 3342; z4;11 ¼ 4008; z4;12 ¼ 0; z4;13 ¼ 613,
z4;14 ¼ 2300; z4;15 ¼ 1500; z4;16 ¼ 0
z5;10 ¼ 0; z5;11 ¼ 0; z5;12 ¼ 0; z5;13 ¼ 156; z5;14 ¼ 0,
z5;15 ¼ 0; z5;16 ¼ 0
z6;10 ¼ 0; z6;11 ¼ 0; z6;12 ¼ 4000; z6;13 ¼ 2531,
z6;14 ¼ 0; z6;15 ¼ 0; z6;16 ¼ 0
Z7;10 ¼ 0; Z7;11 ¼ 0; Z7;12 ¼ 0; Z7;13 ¼ 0; Z7;14 ¼ 0; Z7;15 ¼ 0,
Z7;16 ¼ 0; 3150
T) of refined oil at depots, capacities (MT) of depots, minimum storage
pots.
D6 D7 D8 D9 D10
30 196.40 255.80 153.80 46.10 107.60
.50 276.40 – 175.10 – 182.35
95 6140 16,724 7705 6588 6643
32 7145 46,611 15,660 15,286 12,643
307 840 386 341 345
23 56 35 30 32
18 60 40 24 39
24 50 42 28 35

ARTICLE IN PRESS
Table 3Transportation cost (Rs.) of oil from depots (D1–D7) to sales areas (S1–S16) and monthly demand of refined oil (MT) at sales areas.
Depots Sales areas
S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 S13 S14 S15 S16
D1 40.00 40.00 40.00 85.00 86.00 90.00 98.00 95.00 96.00
D2 85.00 84.00 80.00 40.00 40.00 42.00 60.00 59.00 61.00
D3 65.00 69.00 67.00 95.00 97.00 98.00 39.00 38.00 41.00
D4 36.00 38.00 41.00 56.00 58.00 54.00 62.00
D5 45.00 42.00 39.00 35.00 37.00 65.00 67.00
D6 43.00 45.00 45.00 61.00 65.00 66.00 70.00
D7 51.00 55.00 52.00 71.00 67.00 69.00 42.00
Demand
Maximum 3050 7760 2610 3690 4850 5100 1560 2305 3920 3762 4500 4320 4100 2840 1760 4000
Tolerance 1 38 360 210 190 244 298 104 105 296 250 348 120 442 272 140 400
Tolerance 2 90 400 250 240 200 350 85 130 340 140 250 160 400 180 70 250
Tolerance 3 60 450 180 120 210 310 120 74 160 270 100 250 230 130 100 120
Minimum 2925 7150 2280 3420 4400 4500 1280 2068 3440 3342 4008 4000 3300 2300 1500 3150
Tolerance 1 87 250 120 80 206 302 176 132 184 170 144 200 358 268 120 250
Tolerance 2 30 300 90 100 170 120 70 150 300 100 180 100 250 200 100 100
Tolerance 3 50 200 50 56 250 180 58 110 250 180 200 150 140 130 150 160
Table 4Transportation cost (Rs.) of oil from depots (D8–D10) to sales areas (S17–S26) and monthly demand of refined oil (MT) at sales areas.
Depots Sales areas
S17 S18 S19 S20 S21 S22 S23 S24 S25 S26
D8 36.00 35.00 44.00 52.00 56.00 72.00 78.00 80.00 62.00 65.00
D9 54.00 55.00 52.00 45.00 59.00 65.00 60.00 74.00 78.00 82.00
D10 75.00 78.00 74.00 62.00 66.00 45.00 42.00 44.00 36.00 38.00
Demand
Maximum 2340 4800 8800 4200 3500 3400 7600 1600 1190 1865
Tolerance 1 120 188 348 168 390 194 400 150 90 165
Tolerance 2 100 105 200 130 300 350 200 80 50 60
Tolerance 3 210 150 250 150 350 320 100 30 80 85
Minimum 2110 4400 8200 3900 3000 2885 6850 1400 950 1570
Tolerance 1 110 212 252 132 110 321 350 100 150 130
Tolerance 2 200 200 100 145 300 250 135 75 100 80
Tolerance 3 90 170 160 170 250 280 180 40 90 120
1
0.917
�c
1.68 1.69 1.73 Cost
Fig. 4. Cost (in Rs. crore) goal and satisfaction level for target and
tolerance set 1.
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713710
z8;17 ¼ 2110; z8;18 ¼ 4400; z8;19 ¼ 2198; z8;20 ¼ 0,
z8;21 ¼ 0; z8;22 ¼ 0; z8;23 ¼ 0; z8;24 ¼ 0; z8;25 ¼ 0,
z8;26 ¼ 0
z9;17 ¼ 0; z9;18 ¼ 0; z9;19 ¼ 6002; z9;20 ¼ 3900,
z9;21 ¼ 3000; z9;22 ¼ 0; z9;23 ¼ 1702; z9;24 ¼ 0,
z9;25 ¼ 0; z9;26 ¼ 0
Z10;17 ¼ 0; Z10;18 ¼ 0; Z10;19 ¼ 0; Z10;20 ¼ 0; Z10;21 ¼ 0,
Z10;22 ¼ 2885; Z10;23 ¼ 5148; Z10;24 ¼ 1400; Z10;25 ¼ 950,
Z10;26 ¼ 1570,
lC ¼ 0:917291; lP¼ 1; lD
d ¼ 1 ðd ¼ 1;2; . . . ;10Þ,
lþs ; l�
s ¼ 1 ðs ¼ 1;2; . . . ;26Þ
Using the above solution, we calculate the totalproduction of refined oil at refineries as 91,881 MT. Alsothe total transshipment cost of the petroleum refinerycompany is calculated from the cost goal (3.1) as Rs.1.6924 crore. This cost is higher than the initial target cost
of the company (Rs. 1.68 crore). As a result, the member-ship function value of the cost goal is obtained aslC¼ 0:917291. Clearly, the cost goal is not completely
satisfied and hence the company has to spend 0.0124crore more to fulfill the demand of refined oil completelyat destinations (using the constraint (3.9) corresponding

ARTICLE IN PRESS
1
�c
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713 711
to the cost goal in the FGP model). The cost goal andsatisfaction level is shown in Fig. 4.
The membership function values corresponding toproduction goal ðlP
Þ, storage goals ðlDd ; d ¼ 1;2; . . . ;10Þ,
and demand goals (lþs , l�s , s ¼ 1;2; . . . ;26) are obtained asunity. This indicates that by spending Rs. 1.6924 crore, thecompany can transport the required amount of refined oilto all sales destinations and meet their individualdemands. Also, the minimum storage requirements usedfor emergency purposes at all depots are fulfilled.
1.80 1.98 Cost
Fig. 5. Cost (in Rs. crore) goal and satisfaction level for target and
tolerance set 2.
6.2. Solution for target and tolerance set 2
By solving the model (3.8)–(3.18) based on data givenin Tables 1–4, the supplies of refined oil (MT) fromrefineries (xr , r ¼ 1, 2) to depots (yrd, r ¼ 1, 2;d ¼ 1;2; . . . ;10) and from depots to sales areas (zds,d ¼ 1;2; . . . ;10; s ¼ 1;2; . . . ;26) are obtained as followsfor the target and tolerance set 2:
x1 ¼ 50;000; x2 ¼ 46;000
y11 ¼ 16;028; y12 ¼ 0; y13 ¼ 14;881; y14 ¼ 0,
y15 ¼ 0; y16 ¼ 0; y17 ¼ 4146; y18 ¼ 0; y19 ¼ 14;945,
y10 ¼ 0
y22 ¼ 309; y23 ¼ 2888; y24 ¼ 12;095; y25 ¼ 595,
y26 ¼ 6838; y28 ¼ 10;977; y2;10 ¼ 12;298
z11 ¼ 2925; z12 ¼ 7150; z13 ¼ 2280; z14 ¼ 0,
z15 ¼ 3561; z16 ¼ 0; z17 ¼ 0; z18 ¼ 0; z19 ¼ 0
z21 ¼ 0; z22 ¼ 0; z23 ¼ 0; z24 ¼ 0; z25 ¼ 295,
z26 ¼ 0; z27 ¼ 0; z28 ¼ 0; z29 ¼ 0
z31 ¼ 0; z32 ¼ 0; z33 ¼ 0; z34 ¼ 3420; z35 ¼ 545,
z36 ¼ 4500; z37 ¼ 1280; z38 ¼ 2068; z39 ¼ 3440
z4;10 ¼ 3342; z4;11 ¼ 4008; z4;12 ¼ 0; z4;13 ¼ 613,
z4;14 ¼ 2300; z4;15 ¼ 1500; z4;16 ¼ 0
z5;10 ¼ 0; z5;11 ¼ 0; z5;12 ¼ 0; z5;13 ¼ 156; z5;14 ¼ 0,
z5;15 ¼ 0; z5;16 ¼ 0
z6;10 ¼ 0; z6;11 ¼ 0; z6;12 ¼ 4000; z6;13 ¼ 2531,
z6;14 ¼ 0; z6;15 ¼ 0; z6;16 ¼ 0
z7;10 ¼ 0; z7;11 ¼ 0; z7;12 ¼ 0; z7;13 ¼ 0
z7;14 ¼ 0; z7;15 ¼ 0; z7;16 ¼ 3150
z8;17 ¼ 2110; z8;18 ¼ 0; z8;19 ¼ 8200; z8;20 ¼ 0; z8;21 ¼ 0,
z8;22 ¼ 0; z8;23 ¼ 0; z8;24 ¼ 0; z8;25 ¼ 0; z8;26 ¼ 0
z9;17 ¼ 0; z9;18 ¼ 4400; z9;19 ¼ 0; z9;20 ¼ 3900,
z9;21 ¼ 3000; z9;22 ¼ 2354; z9;23 ¼ 0; z9;24 ¼ 0,
z9;25 ¼ 0; z9;26 ¼ 0
z10;17 ¼ 0; z10;18 ¼ 0; z10;19 ¼ 0; z10;20 ¼ 0; z10;21 ¼ 0,
z10;22 ¼ 531; z10;23 ¼ 6850; z10;24 ¼ 1400; z10;25 ¼ 0,
z10;26 ¼ 1570
lC¼ 1:0; lP
¼ 1; lDd ¼ 1 ðd ¼ 1;2; . . . ;10Þ,
lþs ; l�
s ¼ 1 ðs ¼ 1;2; . . . ;26Þ
For target and tolerance set 2, the cost target is Rs. 1.8crore and the cost tolerance is Rs. 0.18 crore. From theabove solution, the total refined oil produced is calculatedas 96,000 MT and the total cost, from the cost goal (3.1), oftranshipment of oil to depots and sales area as Rs. 1.8crore. This implies that the cost goal is completelysatisfied as shown in Fig. 5. As a result, the companyneeds to spend Rs. 1.8 crore for transporting refined oil todepots and sales areas to satisfy their demands. It is to benoted here that the production of refined oil has increasedby 4119 MT due to the increase in demand of refined oil atsales areas.
6.3. Solution for target and tolerance set 3
By solving the model (3.8)–(3.18) based on data givenin Tables 1–4, the supplies of refined oil (MT) fromrefineries (xr , r ¼ 1, 2) to depots (yrd, r ¼ 1, 2;d ¼ 1;2; . . . ;10) and from depots to sales areas (zds,d ¼ 1;2; . . . ;10; s ¼ 1;2; . . . ;26) are obtained as followsfor the target and tolerance set 3:
x1 ¼ 49;898; x2 ¼ 48;102
y11 ¼ 16;028; y12 ¼ 0; y13 ¼ 14;881; y14 ¼ 0; y15 ¼ 3937,
y16 ¼ 0; y17 ¼ 840; y18 ¼ 0; y19 ¼ 14;250; y10 ¼ 0
y22 ¼ 309; y23 ¼ 2212; y24 ¼ 12;095; y25 ¼ 0,
y26 ¼ 6802; y28 ¼ 15;274; y2;10 ¼ 11;410
z11 ¼ 2925; z12 ¼ 7150; z13 ¼ 2280; z14 ¼ 3420,
z15 ¼ 141; z16 ¼ 0; z17 ¼ 0; z18 ¼ 0; z19 ¼ 0
z21 ¼ 0; z22 ¼ 0; z23 ¼ 0; z24 ¼ 0; z25 ¼ 294,
z26 ¼ 0; z27 ¼ 0; z28 ¼ 0; z29 ¼ 0

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713712
z31 ¼ 0; z32 ¼ 0; z33 ¼ 0; z34 ¼ 0; z35 ¼ 4415,
z36 ¼ 5100; z37 ¼ 1560; z38 ¼ 2305; z39 ¼ 3440
z4;10 ¼ 0; z4;11 ¼ 0; z4;12 ¼ 1513; z4;13 ¼ 3300,
z4;14 ¼ 2300; z4;15 ¼ 1500; z4;16 ¼ 3150
z5;10 ¼ 3342; z5;11 ¼ 0; z5;12 ¼ 0; z5;13 ¼ 156,
z5;14 ¼ 0; z5;15 ¼ 0; z5;16 ¼ 0
z6;10 ¼ 0; z6;11 ¼ 4008; z6;12 ¼ 2487; z6;13 ¼ 0,
z6;14 ¼ 0; z6;15 ¼ 0; z6;16 ¼ 0
z7;10 ¼ 0; z7;11 ¼ 0; z7;12 ¼ 0; z7;13 ¼ 0; z7;14 ¼ 0,
z7;15 ¼ 0; z7;16 ¼ 0
z8;17 ¼ 2110; z8;18 ¼ 4400; z8;19 ¼ 0; z8;20 ¼ 3900,
z8;21 ¼ 3000; z8;22 ¼ 0; z8;23 ¼ 0,
z8;24 ¼ 0; z8;25 ¼ 0; z8;26 ¼ 0
z9;17 ¼ 0; z9;18 ¼ 0; z9;19 ¼ 8200; z9;20 ¼ 0; z9;21 ¼ 0,
z9;22 ¼ 2885; z9;23 ¼ 0; z9;24 ¼ 0; z9;25 ¼ 0; z9;26 ¼ 0
z10;17 ¼ 0; z10;18 ¼ 0; z10;19 ¼ 0; z10;20 ¼ 0; z10;21 ¼ 0,
z10;22 ¼ 0; z10;23 ¼ 6850; z10;24 ¼ 1400; z10;25 ¼ 950,
z10;26 ¼ 1865
lC¼ 1:0; lP
¼ 1; lDd ¼ 1 ðd ¼ 1;2; . . . ;10Þ,
lþs ; l�
s ¼ 1 ðs ¼ 1;2; . . . ;26Þ
For target and tolerance set 3, the cost target is Rs. 1.85crore and the cost tolerance is Rs. 0.17 crore. From theabove solution, the total refined oil produced is calculatedas 98,000 MT and the total cost of transhipment of oil todepots and sales area as Rs. 1.
We have performed some other realistic scenarios andtried to get more insights on the results of the proposedmodel, especially from economic view points. For thispurpose, we have considered the transhipment cost goalas a crisp goal with fixed budget of Rs. 1.68 crores withoutany relaxation. The target and tolerance values of all othergoals are same as that of target and tolerance set 1. Usingthis setting, the total production of refined oil is obtainedas 91,567.57 MT. However, the minimum demand goal forsales area 13 (S13) is not satisfied. The membershipfunction value of the corresponding goal is l�13 ¼ 0:1245.As a result, there will be a shortage of refined oil at S13and it will have adverse impacts on the economy of thearea.
Based on the same setting (crisp transhipment costgoal), if we further reduce the budget to Rs. 1.65, then weobserve more shortage of refined oils at four sales areas,namely, S6, S13, S14, and S16. The corresponding member-ship function values are obtained as l�6 ¼ l�13 ¼ l�14 ¼ 0,l�16 ¼ 0:1245. The total refined oil produced is90,762.17 MT. It is clear from the above two cases thatthe production of refined oil reduces as the totaltranshipment cost reduces. This is an obvious situationin practical decision-making context that is also sup-ported by our results.
While executing the code for different target andtolerance sets and analyzing the obtained results, wefound the following important observations on utilizationof production capacities of the refineries. Total productioncapacity of refineries is 115,000 MT. To fulfill demands atpresent sales areas the company should produce at least98,000 MT refined oil. It indicates that the actual produc-tion capacities of the two refineries are not optimallyutilized. The total unutilized refinery capacity is17,000 MT. Therefore, the company may consider supply-ing refined oil to new sales areas to optimize theutilization of production capacities. By doing this, thecompany may earn more revenue through proper utiliza-tion of its resources.
Overall, the proposed approach offers ample flexibil-ities to the decision-maker. The decision-maker is free tochoose different sets of target and tolerance values ofgoals. A conservative decision-maker may try to specifymore sets of values of target and tolerance of goals andvisualize all the possible alternatives after a single run ofthe approach. Therefore, without any extra computationaleffort, the decision-maker can examine different possiblesituations and take final decisions. For verifying theresults, we solve the model (3.8)–(3.18) by LINGO (version5.0) using the same data set. Since there are three sets ofvalues of target and tolerance of goals, we had to constructthree individual models. We execute the three modelsseparately and obtain same solutions.
7. Conclusions
In this study, we proposed a hybrid GA for solving FGPmodels having more than one set of values of target andtolerance of goals. The proposed technique is able to findcompromise solutions for a finite number of preferencesof the decision-maker in a single run. This brings freedomto the decision-maker to effectively set his/her goals’target and tolerance values while decision-making in anuncertain environment. The conservative decision-makermay opt for more set of values for the goals. Moreover, thedecision-maker may have opportunity of refining thetolerances after examining the solution obtained from theprevious set. If the obtained solution is not satisfactorythen he/she can redefine the target and tolerance of goalsand proceed in this way until desired result is achieved.Thus, the proposed approach can provide a foundation formore flexible decision making in uncertain environments.This approach is applied to a petroleum refinery caseproblem and satisfactory compromise solutions areobtained.
This research offers some future directions. First of all,the proposed approach can be combined with other typesof FGP models. Secondly, apart from using the GA asthe searching tool, some other meta-heuristic techniquesor population based approaches may be used. Finally,a software toolkit can be developed based on the pro-posed approach so that any user can easily use it to solvea FGP model and enjoy the flexibility of decision-making.The current FGP literature does not have such a flexibletool.

ARTICLE IN PRESS
D.K. Sharma, R.K. Jana / Int. J. Production Economics 122 (2009) 703–713 713
Acknowledgment
The authors are thankful to the anonymous referees fortheir insightful comments which have helped to improv-ing the overall presentation and quality of the paper.
References
Abd El-Wahed, W.F., 2001. A multi-objective transportation problemunder fuzziness. Fuzzy Sets and Systems 117, 27–33.
Abd El-Wahed, W.F., Lee, S.M., 2006. Interactive fuzzy goal programmingfor multi-objective transportation problems. Omega 34, 158–166.
Bit, A.K., Biswal, M.P., Alam, S.S., 1992. Fuzzy programming approach tomulticriteria decision making transportation problem. Fuzzy Setsand Systems 50, 35–41.
Charnes, A., Cooper, W.W., 1961. Management Models and IndustrialApplication of Linear Programming. Wiley, New York.
Chen, L.H., Tsai, F.C., 2001. Fuzzy goal programming with differentimportance and priorities. European Journal of Operational Research133, 548–556.
Gentle, J.E., 2004. Random Number Generation and Monte CarloMethods, second ed. Springer, New York.
Goldberg, D.E., 1989. Genetic Algorithms in Search, Optimization andMachine Learning. Addison-Wesley, New York.
Hemaida, R.S., Kwak, N.K., 1994. A linear goal programming model fortransshipment problems with flexible supply and demand con-straints. Journal of Operational Research Society 45 (2), 215–224.
Lee, S.M., Moore, L.J., 1973. Optimizing transportation problems withmultiple objectives. AIEE Transactions 5, 333–338.
Li, Y.Z., Gen, M., Ida, K., 1998. Improved genetic algorithm for solvingmulti-objective solid transportation problem with fuzzy number.Japaneses Journal of Fuzzy Theory Systems 4, 220–229.
Li, L., Lai, K.K., 2000. A fuzzy approach to the multiobjective transporta-tion problem. Computers & Operational Research 27, 43–57.
Liu, S.T., Kao, C., 2004. Solving fuzzy transportation problems based onextension principle. European Journal of Operational Research 153(3), 661–674.
Michalewicz, Z., Vignaux, G.A., Hobbs, M., 1991. A non-standard geneticalgorithm for the nonlinear transportation problem. ORSA Journal onComputing 3 (4), 307–316.
Moore, L.J., Taylor III, B.W., Lee, S.M., 1978. Analysis of a transshipmentproblem with multiple conflicting objectives. Computers & Opera-tions Research 5, 39–46.
Narasimhan, R., 1980. Goal programming in a fuzzy environment.Decision Sciences 11, 325–336.
Rubin, P.A., Narasimhan, R., 1984. Fuzzy goal programming with nestedpriorities. Fuzzy Sets and Systems 14, 115–129.
Sharma, D.K., Jana, R.K., 2007. Application of fuzzy goal programmingand genetic algorithm to nutrient management for rice cropplanning. Global Digital Business Review 2 (1), 103–108.
Sharma, D.K., Ghosh, D., Mattison, D., 2003. An application of goalprogramming with penalty functions to transshipment problems.International Journal of Logistics: Research and Applications 6 (3),125–136.
Tamiz, M., Jones, D.F., Romero, C., 1998. Goal programming for decisionmaking: an overview of the current state-of-the-art. EuropeanJournal of Operational Research 111, 569–581.
Tiwari, R.N., Dharmar, S., Rao, J.R., 1987. Fuzzy goal programming—anadditive model. Fuzzy Sets and Systems 24, 27–34.
Vignaux, G.A., Michalewicz, Z., 1991. A genetic algorithm for the lineartransportation problem. IEEE Transactions on Systems, Man andCybernetics 21 (2), 445–452.
Yaghoobi, M.A., Tamiz, M., 2007. A method for solving fuzzy goalprogramming problems based on MINMAX approach. EuropeanJournal of Operational Research 177, 1580–1590.
Zimmermann, H.-J., 1987. Fuzzy sets, Decision Making and ExpertSystems. Kluwer Academic Publishers, Boston.