Embed Size (px)
Citation preview

Defence Research and Development CanadaScientific ReportDRDC-RDDC-2019-R027March 2019
CAN UNCLASSIFIED
CAN UNCLASSIFIED
A hybrid active-passive radar system concept for extending target detection range
D. Brookes, S. Wong, R. Jassemi-Zargani, B. KimDRDC – Ottawa Research Centre

CAN UNCLASSIFIED
Template in use: EO Publishing App for SR-RD-EC Eng 2018-12-19_v1.dotm
© Her Majesty the Queen in Right of Canada (Department of National Defence), 2019© Sa Majesté la Reine en droit du Canada (Ministère de la Défense nationale), 2019
CAN UNCLASSIFIED
IMPORTANT INFORMATIVE STATEMENTS
This document was reviewed for Controlled Goods by Defence Research and Development Canada (DRDC) using the Schedule to the Defence Production Act.
Disclaimer: Her Majesty the Queen in right of Canada, as represented by the Minister of National Defence ("Canada"), makes no representations or warranties, express or implied, of any kind whatsoever, and assumes no liability for the accuracy, reliability, completeness, currency or usefulness of any information, product, process or material included in this document. Nothing in this document should be interpreted as an endorsement for the specific use of any tool, technique or process examined in it. Any reliance on, or use of, any information, product, process or material included in this document is at the sole risk of the person so using it or relying on it. Canada does not assume any liability in respect of any damages or losses arising out of or in connection with the use of, or reliance on, any information, product, process or material included in this document.
Endorsement statement: This publication has been peer-reviewed and published by the Editorial Office of Defence Research and Development Canada, an agency of the Department of National Defence of Canada. Inquiries can be sent to: [email protected].

DRDC-RDDC-2019-R027 i
Abstract
A hybrid active-passive radar system is proposed to extend the target detection range of an air surveillance system. Passive sensing is employed to exploit the illumination power of the radar system. This scheme makes use of the radar’s illumination power propagating to the maximum Line-Of-Sight (LOS) distance to monitor the target echoes reflected at this extended range by the passive sensors. In effect, the passive receivers are tasked to pick up the target echoes well before the primary active radarsystem. A particular application of this system concept is point defence against cruise missiles threatening the critical infrastructure assets of urban areas.
The line-of-sight distance that the radar’s illuminating power can reach is often substantially greater than the radar’s designed detection range. A passive sensor system can be placed farther forward, near the radar’s LOS illumination range, to provide a “trip-wire” warning which can also be used to cue the radar where to focus the search, and to point a defensive weapon system in the direction of the incoming target is incoming to provide a better chance of success in mitigating the threat.
A model of a passive sensing system working in conjunction with an air-surveillance radar system has been developed. Results indicate that the add-on passive system can work effectively to extend the target detection range, augmenting the capability of the radar system against targets with very low radar cross sections such as cruise missiles.
Significance to defence and security
The hybrid active-passive radar concept presented in this report may be a cost-effective method to extend the detection and tracking range of an active radar system without requiring any physical modifications to that radar. Depending on the speed of the threat and the location of the passive receivers, and as long as the threat is sub-sonic, the advanced warning provided by this hybrid system could amount to several minutes, which may be crucial to identifying the threat and mitigating its effects. Also, depending on the range of the passive “trip-wire” network of receivers, this concept could significantly increase the surveillance coverage of the primary radar system.
Although this study only looked at extending the detection range of the short range mode of the Multifunction Phased Array Radar (MPAR) system, the hybrid concept might also be used to extend the capability of the radar to detect and track more stealthy targets using the pulse compression waveforms of the MPAR system’s long range mode. This could be the subject of future study.
Future work might also investigate how this concept might be used to augment and extend the capabilities of the current long-range and short-range radars of the North Warning System. One of the most challenging issues in this example would probably be that the much lower operational frequencies of this system would require passive receiver antennas with footprints of twice the size required for MPAR.

ii DRDC-RDDC-2019-R027
Résumé
Un système radar actif-passif hybride est proposé pour étendre la portée de détection des cibles d’un système de surveillance aérienne. La détection passive est utilisée pour exploiter la puissance d’illumination du système radar. Cette méthode exploite la puissance d’illumination du radar qui se propage vers la distance maximale en visibilité directe (LOS) pour que les capteurs passifs puissent surveiller les échos réfléchis par les cibles à cette distance accrue. En fait, les récepteurs passifs doivent capter les échos des cibles bien avant le système radar actif primaire. Une application particulière de cemodèle de système est la défense au but contre des missiles de croisière qui menacent les infrastructures essentielles des zones urbaines.
La distance en visibilité directe que la puissance d’illumination du radar peut atteindre est souvent beaucoup plus grande que la portée de détection prévue du radar. On peut placer un système de capteurs passifs plus vers l’avant, près de la portée d’illumination en LOS du radar, pour fournir un avertissement de type « fil-piège » qu’on peut également utilisé afin d’indiquer au radar où concentrer la recherche, et pour pointer un système d’armes défensives dans la direction de la cible en rapprochement en vue d’améliorer les chances de réussir à réduire la menace.
On a développé un modèle de système de détection passive fonctionnant en conjonction avec un système de radar de surveillance aérienne. Selon les résultats, le système passif supplémentaire peut fonctionner efficacement pour étendre la portée de détection de la cible, augmentant ainsi la capacité du système radar contre les cibles à très faible surface équivalente radar, comme les missiles de croisière.
Importance pour la défense et la sécurité
Le modèle de radar actif-passif hybride présenté dans le présent rapport peut être une méthode rentable pour accroître la portée de détection et de poursuite d’un système radar actif sans devoir le modifier physiquement. Selon la vitesse de la menace et l’emplacement des récepteurs passifs, et tant que la menace est sous-sonique, l’avertissement avancé fourni par ce système hybride pourrait durer plusieurs minutes, ce qui peut être crucial pour déceler la menace et limiter ses effets. De plus, selon la portée du réseau passif de récepteurs de type « fil-piège », ce modèle pourrait accroître considérablement la couverture de surveillance du système radar primaire.
Bien que cette étude porte seulement sur l’augmentation de la portée de détection du mode courte portée du système radar polyvalent à éléments en phase (MPAR), on pourrait aussi utiliser le modèle hybride pour étendre la capacité du radar à détecter et suivre des cibles plus furtives en utilisant les formes d’onde de compression des impulsions du mode longue portée du système MPAR. Cela pourrait faire l’objet d’une étude ultérieure.
Les travaux futurs pourraient également porter sur la façon d’utiliser ce modèle pour accroître et étendre les capacités des radars à longue portée et à courte portée actuels du Système d’alerte du Nord. De plus, un des problèmes les plus complexes dans cet exemple serait probablement que les fréquences opérationnelles beaucoup plus basses de ce système nécessiteraient des antennes de réception passivesayant des empreintes deux fois plus grandes que celles requises pour le système MPAR.

DRDC-RDDC-2019-R027 iii
Table of contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i Significance to defence and security . . . . . . . . . . . . . . . . . . . . . . . . . i Résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii Importance pour la défense et la sécurité . . . . . . . . . . . . . . . . . . . . . . . ii Table of contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii List of figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv List of tables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2 Active-passive hybrid system . . . . . . . . . . . . . . . . . . . . . . . . . . 5 3 Passive sensing system . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1 Passive detection cell . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 3.2 Receiver antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 3.3 Detected signal requirement and passive detection cell size . . . . . . . . . . . . 15
4 Coherent integration and signal-to-noise ratio . . . . . . . . . . . . . . . . . . . 17 4.1 Signal-to-noise ratio . . . . . . . . . . . . . . . . . . . . . . . . . . 17 4.2 Moving target signals. . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Point defence application . . . . . . . . . . . . . . . . . . . . . . . . . . 24 6 Reducing the passive system’s complexity . . . . . . . . . . . . . . . . . . . . 27 7 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 Annex A TDOA for analyzing reflected signal from a target. . . . . . . . . . . . . . . 35 List of symbols/abbreviations/acronyms/initialisms . . . . . . . . . . . . . . . . . . 39

iv DRDC-RDDC-2019-R027
List of figures
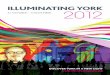
Figure 1: Extent of coverage by land-based FM broadcasting (upper map) and TV broadcasting stations (bottom map) in Canada as in 2010 [1]. . . . . . . . . . . . . . . . . 2
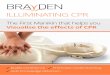
Figure 2: “Map showing geographic concentration of radiolocation stations along the north and east coasts of Canada operated by the North Warning System in the band 1215–1390 MHzand aeronautical radionavigation stations” from [1]. . . . . . . . . . . . . . . . 3
Figure 3: Schematic of the add-on passive detection concept. . . . . . . . . . . . . . . . 5
Figure 4: Sensor configuration in a passive detection cell defined conceptually by the area shaded yellow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Figure 5: Passive range extension for MPAR. . . . . . . . . . . . . . . . . . . . . . 9
Figure 6: Two receiver array antenna options that would meet the gain and FOV requirements of the passive receiver antennas. For these simple arrays, each element would be physically aimed in a different direction such that the total FOV would be as required, i.e., there would not be any electronic beamforming.. . . . . . . . . . . . . . 10
Figure 7: Approximate appearance of a receiving array constructed from 4 MPAR sub-array panels of 64 elements each. The dimensions are based on the assumption that the centre of the operating frequency band will be 2.8 GHz (i.e., in the middle of the operational band of 2.7 GHz to 2.9 GHz). . . . . . . . . . . . . . . . . . . 11
Figure 8: Simultaneous planar array receiver patterns based on a 16 x 16 element array (upper row) and a 14 x 14 element array (bottom row) using identical sets of Taylor weights along each row or column of the array to obtain a peak to sidelobe ratio of at least 26 dB. 12
Figure 9: Four different perspectives for two beams (beam1 and beam27) that contribute to the overall FOV picture shown in for the 16 x 16 array of Figure 8. . . . . . . . . . 14
Figure 10: Dimensions and area of coverage of a passive detection cell located at RLOS = 190 km. 16
Figure 11: A passive detection cell at RLOS = 190 km under the MPAR illumination. . . . . 16
Figure 12: A detected stationary target signal (a): without added noise; and (b) with SNRREC = 40. 19
Figure 13: Samples of 20 noisy signals each with SNRREC = 2 from a stationary target, and each represented by a different colour. . . . . . . . . . . . . . . . . . . . . . 19
Figure 14: Coherent integration: (a) of 20 noisy signals from a stationary target; (b) processing via the range-Doppler method (stationary target). . . . . . . . . . . . . . . . 20
Figure 15: Samples of 20 individual noisy signals each with SNRREC = 2 from a moving target. . 22
Figure 16: Coherent integration (a) of 20 noisy signals from a moving target; and (b) processing via the range-Doppler method (moving target). . . . . . . . . . . . . . . . . 22
Figure 17: A range-Doppler diagram for the moving target. . . . . . . . . . . . . . . . 23
Figure 18: A scenario of MPAR with an extended range provided by a passive cell for point defence against cruise missile.. . . . . . . . . . . . . . . . . . . . . . . 24

DRDC-RDDC-2019-R027 v
Figure 19: An enlarged view of the surveillance area of the passive system. . . . . . . . . . 25
Figure 20: Passive detection and localization of multiple targets. . . . . . . . . . . . . . 26
Figure 21: Extended-range detection coverage at 190 km by 33 passive detection cell units. . . 27
Figure 22: A bigger “trip-wire” detection cell unit at RLOS = 126 km. . . . . . . . . . . . 29
Figure 23: Extended range detection coverage at 126 km with fewer passive cells. . . . . . . 29
Figure 24: (a) all possible target locations, (b) estimated initial target location at t1, (c) estimated last target location at tL, (d) likely target trajectory. . . . . . . . . . . . . . . 30
Figure A.1: Detecting an illuminated target using the TDOA mode. . . . . . . . . . . . . 35

vi DRDC-RDDC-2019-R027
List of tables
Table 1: MPAR parameters and specifications [1]. . . . . . . . . . . . . . . . . . . . 6
Table 2: Additional MPAR system information. . . . . . . . . . . . . . . . . . . . . 7
Table 3: List of azimuth and elevation directions for each of the 84 sub-beams for the array FOV depicted in Figure 8:. . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 4: Passive surveillance options, benefits and antenna requirements for 360° azimuthcoverage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31

DRDC-RDDC-2019-R027 1
1 Introduction
Often, an improvement in the radar’s operational capability is desired, as in air surveillance, where an extended target detection range would be highly advantageous. The North Warning System for air surveillance, and point defence against cruise missiles targeting urban areas are two examples in which a longer detection range is sought to provide better situational awareness and extra warning time of the incoming threats. However, making design changes and upgrading existing operational radars can be avery complex and costly process, since they are designed for specific applications with specifications andoperating parameters carefully selected to meet the capability required. For example, the operating performance of an air surveillance radar system is defined by a number of considerations such as effective transmitted power, detection range, and minimum detectable target size. The radar system’s operational functions are optimized for a given set of requirements, and so the radar performance specifications are fixed within a design envelope.
Therefore, instead of physically altering an existing air-surveillance radar system, this report proposes and investigates an alternative approach to extending a radar’s detection range by using an add-on passive receiver system that exploits the transmitted power of an active radar indirectly. The proposed add-on system operates independently to augment the primary system’s air surveillance detection range capability so that it does not perturb nor interfere with the primary radar’s operation (except possibly at a very high level).
Although there may be advantages to having a real-time, direct two-way communications link between each passive sensor “node” and the primary active radar system, they may be outweighed by the disadvantages resulting from the increased cost and complexity introduced to the hybrid system. One such advantage might be achieved—if the receiver antennas are phased arrays—by synchronizing the primary radar beam with active scanning of the passive receiver beams. This could be used to improve thepointing direction of the passive beams to improve the Signal-to-Noise-Ratio (SNR) over what might be obtained by using a predetermined set of simultaneous receive beams (as proposed in Section 3.2). However, in order to directly link the passive sensor nodes to the primary radar may require invasiveupgrades to the primary radar’s electronics which could be prohibitively expensive. Part of this cost would be due to the fact that the passive receiver network might span hundreds of kilometres, and consist of dozens of passive nodes with each node requiring a link to cover more than 100 km. A less invasive approach might be to have all of the passive radar nodes provide a collective cue to the primary radar (requiring only a single unidirectional, low bandwidth link), or to a command centre, which could be used to remotely direct the primary radar to devote more resources toward scanning for threats along bearings implied by the passive system.
One of the objectives of this investigation is to consider design concepts that might be built at a reasonable cost and would be feasible to implement in both southern and arctic environments. Making the passive receivers capable of operating over a very wide range of frequencies (e.g., spanning FM radio to microwave radar frequencies, i.e., 88 MHz to over 3 GHz) to take advantage of as many emitters of opportunity as possible might seem like a good idea, but it would undoubtedly add a level of complexity to these systems that would make them prohibitively expensive, not to mention the larger physical footprint, and power requirements. In the Arctic, most of this ultra-wideband capability could not even be used due to the lack of existing infrastructure. For example, as implied by Figure 1 the available coverage of land-based FM radio and TV broadcast stations in the Canadian Arctic is virtually non-existent due to

2 DRDC-RDDC-2019-R027
the area’s very sparse population [1]. The same can be said about most other land-based communications systems in the Canadian Arctic, such as cell-phone and Wi-Fi networks [1]. Currently, the only land-based transmitters in the Canadian Arctic with any significant footprint are the radar systems of the North Warning System (1215–1390 MHz), and their associated Secondary Surveillance Radar (SSR) systems (1030 and 1090 MHz)—also known as Identification Friend or Foe (IFF). The approximatecoverage by these systems is shown in Figure 2 [1]. Mobile emitters of opportunity, such as ship-borne navigation radars, might also provide some utility, but again, they would be sparsely located in the Arctic and only available during the main shipping season (which varies annually by region and ship type, but is now usually only from mid-July to mid-November).
Figure 1: Extent of coverage by land-based FM broadcasting (upper map) and TV broadcasting stations (bottom map) in Canada as in 2010 [1].

DRDC-RDDC-2019-R027 3
Figure 2: “Map showing geographic concentration of radiolocation stations along the north and east coasts of Canada operated by the North Warning System in the
band 1215–1390 MHz and aeronautical radionavigation stations” from [1].
These reasons are sufficient that such ultra-wideband contributions will not be considered as part of this report; however, other emitter sources at different frequencies are considered in separate reports such as [2], [3], and may be the subject of future investigations.
Another way to keep system costs to a reasonable level is by designing and building the passive sensor systems using Commercially-Off-The-Shelf (COTS) technologies with solid-state electronics which would operate without any moving parts, thereby minimizing maintenance requirements and costs. Also, since only receivers are employed in the passive system, power consumption would be modest; hence operating costs can be kept low.
Often, as the complexity of a system increases it is generally accompanied by an increased developmental and capital cost along with an increase in the number of potential means of failure, which can also lead to increased maintenance costs. With all of the above arguments in mind, and applying the philosophy of “keep-it-simple,” this report therefore only considers the situation in which the following conditions apply:
1. No direct communication links exist between the active primary radar and the passive receiver nodes; and
2. The combined operational frequency range and instantaneous bandwidth of the passive system is the same, or very similar to, that of the active radar system. For example, the operational frequency of the active radar may be 2.9 GHz with a bandwidth of 2 MHz, but if the instantaneous bandwidth of the

4 DRDC-RDDC-2019-R027
passive system is also 2 MHz, while the operational frequency of the passive system spans a range of 110 MHz, then signals from ship’s S-Band navigational radar’s (at 3.05 GHz) could also be used as emitters of opportunity.
In this paper, a hybrid active-passive concept is assessed by exploring two passive detection architectures. A 4-receiver passive unit to provide 3D target detection and localization, and a 2-receiver unit to provide a “trip-wire” warning function will be discussed. These discussions will help to facilitate a better understanding of how the hybrid concept can help to improve the effectiveness of point-defence against missile threats.
The emphasis will be on assessing the use of this passive sensing technique for point defence against targets with a very low radar cross section (RCS), such as cruise missiles, which could present a serious threat to critical infrastructure assets such as in urban areas.
As outlined in Annex A, a Time-Difference-Of-Arrival (TDOA) technique will be used for target detection signal processing that does not require the use of a direct line-of-sight (LOS) signal from the illumination source as a reference needed to generate the ambiguity function. Instead, the ambiguity function is generated by cross-correlating the signals from pairs of receivers that are time-synchronized.Although the amplitude of the ambiguity function may suffer somewhat by not using the illumination signal as a reference, and the time-synchronization between receivers must be provided from elsewhere, this technique has the following main advantage: it only requires that a direct LOS exists between the illumination source (primary active radar), and the target, followed by a direct LOS between the target and each of the receivers, but not a direct LOS between the illumination source and each of the receivers. A direct LOS between the transmitter and receivers may be very challenging, especially in remote and rough terrain, such as might be found in Canada’s Arctic. For example, in the scenario discussed later, in Section 3.1, where the target is at an altitude of 1 km Above mean Sea Level (ASL) at a slant range of 190 km, with the transmitter at an altitude of 210 m ASL, then simple geometry dictates that the altitude of the receivers would also need to be at a minimum altitude of about 900 m ASL (assuming standard atmospheric propagation).
For this report the source of illumination for the passive sensors is modelled on the short range mode of the Multifunction Phased Array Radar (MPAR) system [4]. MPAR is an S-band Active Electronically Scanned (planar) Array (AESA) radar system, based on cell-phone technology, that is currently being developed in the U.S. as a potential replacement for over five hundred aging Air Traffic Control (ATC) and weather radars with about 330 of the new systems.
This hybrid active-passive concept can provide an improvement to defence against very low RCS threats by extending the target detection and tracking range. For example, in the case of a typical sub-sonic cruise missile, such as the Russian KH101, with a maximum speed of about 280 m/s (MACH 0.85) this hybrid sensing system might provide an extra 20 km of detection range which will allow an extra 70s of warning time of the incoming missile. This extra time can be crucial and very useful in providing an effective response to the threat.
A possible additional advantage of the hybrid system is that it is a bi-static system which may benefit from a bi-static RCS for the target that could be higher than the monostatic RCS associated with the active radar.

DRDC-RDDC-2019-R027 5
2 Active-passive hybrid system
A radar usually has a defined operational range for a given target radar cross-section. This range is determined predominantly by the radar’s transmitted power. However, the transmitted radar power propagates way beyond the designed radar detection range, and this “residual” power is essentially lost. A passive system can be deployed to exploit this unused illumination radar power to extend the detection range of the air surveillance system.
The transmitted radar illumination has an idealized line-of-sight (LOS) range that can be significantly farther out than the active radar’s detection range. This idealized LOS range depends on the target’s flight altitude and the terrain height where the radar is situated. Further elaboration will be given in Section 3.1.
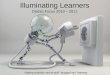
The concept of passive sensing to extend the detection range is to exploit the radar illumination at the idealized LOS distance. A network of passive sensors can be installed near the idealized illumination range. Scattered radar illumination power from the target can then be detected by the passive sensors. A schematic of the active-passive hybrid system composed of an active radar transmitter and passive sensors placed near the idealized LOS radar range is shown in Figure 3.
Figure 3: Schematic of the add-on passive detection concept.
In order to conduct an analysis of the performance of the passive detection system, specifications of the operational characteristics of the active radar system are required. This will enable a proper assessment of the passive system’s capability. Although MPAR is currently being developed to perform the dual function of ATC and weather monitoring, it could also act in a point defence role for detecting and tracking cruise missiles. In its initial development stages it used a single face of an AN/SPY-1 radar system. The AN/SPY-1 is already in service for defending the Aegis-class naval vessels against sea-skimming anti-ship missiles. Some of MPAR’s basic radar parameters and their values for its short-range mode are listed in Table 1.

6 DRDC-RDDC-2019-R027
Table 1: MPAR parameters and specifications [1].
Radar frequency, fR 3 GHzPeak power, PT 158 kWAntenna gain, G 46 dB (39800)Pulse length, p 1 μsPulse duty cycle, C 0.2%Receiver filter bandwidth, r 1.1 MHzReceiver noise density, -140 dBW/MHz
p and pulse C, the radar’s pulse repetition frequency PRF can be determined as,
6
0.002 21x10
C
p
PRF kHz (1)
And the maximum unambiguous radar detection range is given by,
752u
cR kmPRF (2)
where c is the speed of light. Another radar parameter value that is needed in this analysis is the radar B; it can be estimated from the radar antenna gain,
2
2 2
4 4 ( / 4)A DG (3)
R is the radar signal’s wavelength. MPAR has an approximately circular phased array face with diameter D [1] 2/4. The radar antenna diameter D in Equation (3) can be re-expressed as,
D G (4)
The MPAR radar’s beam width, assuming a diffraction-limited beam pattern, is given by,
1deg.B D G(5)

DRDC-RDDC-2019-R027 7
Table 2 summarizes these additional MPAR parametric values; they will be used in the passive sensing analysis. A full MPAR system has 4 phased array faces in a square perimeter to provide a full 360-degrees of surveillance coverage [1]. Each phased array face is capable of providing a 100-degree azimuth FOV coverage through electronic scanning.
Table 2: Additional MPAR system information.
Pulse repetition frequency, PRF 2 kHzMaximum unambiguous detection range, Ru 75 kmRadar beam width, B 1 degreeAzimuth field-of-view, FOVaz 100 degrees
Using the standard mono-static radar equation [5], the signal-to-noise ratio of a detected target echo is given by,
2 2
3 4 16(4 )
T
u r
P GSNR dBR L
(6)
where PT, G, , Ru, , r are defined and their values are listed in Tables 1 and 2. For the purposes of these analyses, the cruise missile radar cross-section (RCS) is assumed to be = 0.01 m2 (e.g., such as reported for the Russian KH101 air-launched cruise missile [6]–[11]), and a system loss L = 1 is assumed (i.e., 0 dB, a lossless system); thus a SNR value of 16 dB (or 40) is obtained. This SNR value can be considered as a nominal value for robust single-pulse signal detection [12]. In a wide variety of signal processing applications, the nominal detection threshold SNR is in the range of 12 to 16 dB [13], [14].Thus, the MPAR parametric values in Tables 1 and 2 appear to be self-consistent and reasonable. In particular, a radar detection range of 75 km against a 0.01 m2 RCS target is consistent with a comparable radar system for similar application; for example, the AN/SPY-1 radar of the Aegis-class destroyers has a stated detection range of 83 km against sea-skimming missiles [15]. Moreover, a single-pulse-mode radarwith a detection SNR of 16 dB, and operating at a PRF of 2 kHz can be considered as desirable for tracking cruise missiles and fire-control applications in point defence. Thus, the MPAR parameters presented in Tables 1 and 2 will be used as a realistic basis for the numerical analysis conducted in this report.

8 DRDC-RDDC-2019-R027
3 Passive sensing system
3.1 Passive detection cell
The passive sensing system, that is to be integrated with the radar system as a hybrid, is composed of a network of passive detection units. They are placed near the idealized LOS range of the active radar’s illumination to fully maximize the detection range extension as depicted in Figure 3. Each passive unit is made up of 4 receivers. They are placed in a quadrilateral configuration, providing a forward looking surveillance function as seen in Figure 4. Scattered signals from a target entering the surveillance area (yellow shaded area) are detected by 4 passive receivers.
Figure 4: Sensor configuration in a passive detection cell defined conceptually by the area shaded yellow.
Three TDOA measurements are obtained from the 4 receivers grouping into three independent pairs of receiving sensors, S1–S2, S3–S4 and S1–S4 as seen in Figure 4. The 3 TDOA measurements are then converted into 3 geometric surfaces known as hyperboloids. A hyperboloid is a 3D surface that represents all possible locations of the target. The intersection of 3 hyperboloid surfaces will ideally produce a point corresponding to the detected target’s location in (x, y, z), and can be translated to longitude, latitude and altitude [2]. Although the TDOA method is developed based on an emitting target, it can be shown that the scattered signal from a target illuminated by a radar source can be treated as if the target is an emitter. This is discussed in Annex A.
Target information from the passive sensing system can be passed on to the primary surveillance system (e.g., MPAR) as a “trip-wire” warning; the extra time provided to the primary radar could be critical in

DRDC-RDDC-2019-R027 9
providing an effective response against the threat. It should be emphasized that the passive system does not need any physical connection to the active radar, and therefore, aside from providing an actionable cue, does not directly interfere with the active radar’s operation; it merely exploits the active transmitter’s illumination power at a distance.
To analyze and assess the performance of the passive concept, a scenario in which an idealized LOS illumination range of 190 km by the active radar is employed. This is shown in Figure 5. A cruise missile has a typical cruise altitude around 1 km relative to the sea level. For a radar transmitter located above the sea level, the radar LOS distance (RLOS) between the radar and a target over a curved segment of the earth’s surface is given, to a good approximation, by:
4 42 23 3T E R ERLOS h R h R (7)
where hT is the height of the target relative to the sea level (m), hR is the height of the radar relative to mean sea level (m), RE is the Earth’s radius (m) and it is assumed that the terrain is relatively smooth and close to mean sea level. The factor of 4/3 is based on the so-called “standard refraction” model [16] of RF propagation for a horizontally stratified troposphere. For hT = 1000 m, hR = 210 m, and RE = 6.375x106 m, the transmitter-to-target distance RLOS = 190 km. This distance is referred to as the idealized LOS range of the radar’s illumination.
Figure 5: Passive range extension for MPAR.
3.2 Receiver antenna
Within each passive unit, each receiver must have an antenna that is capable of providing a Field Of View (FOV) of 100 degrees in azimuth, allowing the detection cell to monitor the air space as indicated in Figure 4 (yellow area). It is much simpler and more practical to have stationary antennas with wide FOV than steerable antennas that have to be synchronized to overlap the 4 receiver beam spots.
The receiver antenna is required to have a large FOV and a reasonably large antenna gain. Figure 6 shows two potential options to meet the requirement; both options, (a) and (b), use a rudimentary receiver

10 DRDC-RDDC-2019-R027
antenna array composed of multiple antennas. For each individual antenna, the gain is set at Gr = 400 (26 dB) at a radar frequency fR = 3 GHz. The receiver antenna dish will have a diameter D = 0.64 m (Equation (4)), and a FOV beamwidth of r = 9 degrees (Equation (5)). To cover a FOV of 100 degrees in azimuth and 90 degrees in elevation, a receiver antenna system will then be composed of 11 x 10 = 110 antenna dishes with each antenna physically oriented in the azimuth and elevation directions required for the full FOV. If, like option (a), the array is constructed as a planar system, then it will have dimensions of 7m x 6.4m which is a fairly large visible cross-section. However, by choosing something like option (b) where the array is either singly curved like a partial cylinder, or doubly curved like a partial spheroid, then the visible cross-section can be reduced to 4.24 m x 6.4 m, or 4.24 m x 3.84 m respectively. Aside from the reduction in visible cross section, option (b) will also reduce the maximum wind load on the array for a wind direction parallel to the surface normal at the centre of the array.
Regardless of which option (a) or (b) is chosen, this is still a reasonable size for a field antenna and can probably be built relatively economically using COTS components. The physical dimensions of option (a) would be very similar to those of the antenna for the AN/FPS-117 long range radar of the North Warning System.
Figure 6: Two receiver array antenna options that would meet the gain and FOV requirements of the passive receiver antennas. For these simple arrays, each element would be physically aimed
in a different direction such that the total FOV would be as required, i.e., there would not be any electronic beamforming.
There is also a third option that should be considered which, although much more electronically complex, could provide significant advantages by greatly reducing the physical size of the array, while also providing a high directional gain and the required FOV in both azimuth and elevation. This option involves combining at least four 8 element by 8 element MPAR panels, operating in receive mode only, to construct a receiving array of 16 x 16 elements (approx. 0.83 m x 0.83 m) as shown in Figure 7. The array’s beamforming architecture would be constructed such that simultaneous beams would be generated in both the azimuth and elevation directions in order to achieve an overall FOV of between 90 and 100 degrees in both directions. In order to generate each individual beam pattern a different set of complex weights would be applied to the outputs of all of the elements of the 16 x 16 element array.

DRDC-RDDC-2019-R027 11
Figure 8 shows the simultaneous beam patterns that would result from two similar examples of a specific implementation of this concept. The top row of Figure 8 shows two perspectives of the output receiver array response for a 16x16 element array, and the bottom row shows what would result from a 14 x 14 element array. In both examples 84 different, but simultaneous, beams were generated by applying a different set of complex weights to each element of the array in order to point a beam at a specific direction while maintaining a peak to side-lobe ratio of at least 26 dB. The peak to side-lobe ratio for each sub-beam was accomplished by using a single set of (linear) Taylor tapering [5], [17] on the amplitudes of the complex element weights.
Figure 7: Approximate appearance of a receiving array constructed from 4 MPAR sub-array panels of 64 elements each. The dimensions are based on the assumption that the centre of the operating
frequency band will be 2.8 GHz (i.e., in the middle of the operational band of 2.7 GHz to 2.9 GHz).
The array beamforming architecture should also be built such that any gaps between beams (i.e., directions in which the antenna gain between adjacent overlapping beams is more than 3 dB below the maximum) is minimized. Figure 8 shows how this was mostly accomplished by using a staggered offset approach resulting in a close-packed beam arrangement; i.e., for each adjacent azimuth direction, the set of elevation beams was offset by approximately a half of one 3dB beam width. However, as indicated in the top row of the figure, where portions of the grey-shaded -3dB “slice” show through, there are still a few small gaps between some of the adjacent beams toward the centre of the FOV. If only a 14 x 14 element array is used then each individual sub-beam becomes slightly wider and, as shown in the bottom half of the figure, the gaps on the coverage become negligible. The main point that we wish to

12 DRDC-RDDC-2019-R027
make here is that with a few minor “tweaks” to the element weighting scheme (e.g., such as using slightly different Taylor window for each azimuth and elevation plane of each beam) it should easily be possible to maintain a high overall gain while eliminating any coverage gaps.
Figure 9 shows four different perspectives for two beams (beam1 and beam27) that contribute to the overall FOV picture shown in for the 16 x 16 array of Figure 8. As indicated, the peak to side-lobe ratio for the 16 x 16 element array is 26.5 dB. The directions of each sub-beam contributing to the overall FOV are provided in Table 3.
Figures 8 and 9 also show a well-known feature of planar array beampatterns: i.e., that as the direction of the beam deviates farther from the broadside direction of the planar array the beam becomes wider and more asymmetrical. However, as implied earlier, this might be mitigated to some degree by adjusting the Taylor tapering for different array planes (i.e., rows and columns). For example, for the beams at the outer edge of the FOV, they could be made narrower to reduce the beamwidth and asymmetry as well as the potential for aliasing, although this might be accomplished at the expense of a lower peak to sidelobe ratio.
Figure 8: Simultaneous planar array receiver patterns based on a 16 x 16 element array (upper row) and a 14 x 14 element array (bottom row) using identical sets of Taylor weights along each row or
column of the array to obtain a peak to sidelobe ratio of at least 26 dB.

DRDC-RDDC-2019-R027 13
Table 3: List of azimuth and elevation directions for each of the 84 sub-beams for the array FOV depicted in Figure 8.
Beam #
Azimuth(deg.)
Elevation(deg.)
Beam #
Azimuth(deg.)
Elevation(deg.)
Beam #
Azimuth(deg.)
Elevation(deg.)
1 -50 -42 29 -16.66 22 57 16.68 382 -50 -26 30 -24.995 30 58 8.345 463 -50 -10 31 -16.66 38 59 25.015 -504 -50 6 32 -24.995 46 60 33.35 -425 -50 22 33 -8.325 -50 61 25.015 -346 -50 38 34 0.01 -42 62 33.35 -267 -41.665 -50 35 -8.325 -34 63 25.015 -188 -33.33 -42 36 0.01 -26 64 33.35 -109 -41.665 -34 37 -8.325 -18 65 25.015 -2
10 -33.33 -26 38 0.01 -10 66 33.35 611 -41.665 -18 39 -8.325 -2 67 25.015 1412 -33.33 -10 40 0.01 6 68 33.35 2213 -41.665 -2 41 -8.325 14 69 25.015 3014 -33.33 6 42 0.01 22 70 33.35 3815 -41.665 14 43 -8.325 30 71 25.015 4616 -33.33 22 44 0.01 38 72 41.685 -5017 -41.665 30 45 -8.325 46 73 50.02 -4218 -33.33 38 46 8.345 -50 74 41.685 -3419 -41.665 46 47 16.68 -42 75 50.02 -2620 -24.995 -50 48 8.345 -34 76 41.685 -1821 -16.66 -42 49 16.68 -26 77 50.02 -1022 -24.995 -34 50 8.345 -18 78 41.685 -223 -16.66 -26 51 16.68 -10 79 50.02 624 -24.995 -18 52 8.345 -2 80 41.685 1425 -16.66 -10 53 16.68 6 81 50.02 2226 -24.995 -2 54 8.345 14 82 41.685 3027 -16.66 6 55 16.68 22 83 50.02 3828 -24.995 14 56 8.345 30 84 41.685 46

14 DRDC-RDDC-2019-R027
Figure 9: Four different perspectives for two beams (beam1 and beam27) that contribute to the overall FOV picture shown in for the 16 x 16 array of Figure 8.

DRDC-RDDC-2019-R027 15
3.3 Detected signal requirement and passive detection cell size
To demonstrate passive sensing for a point defence application, a single phased array face of MPAR (consisting of about 312 8 x 8 element panels) is considered for simplicity. It is facing in the direction of the incoming missile approaching from the North. The phased array face is assumed to have a scan rate of 1s over 100 degrees in azimuth. Furthermore, the MPAR is operating at a PRF of 2000 Hz (Equation (1)), and has a radar beamwidth of 1 degree (see Table 2). From the values of these 3 parameters, it can be determined that MPAR can provide 20 radar pulses in a 1-degree azimuth beamwidth during a radar dwell time of 0.01s. This means that there will be 20 radar pulses available from the transmitted radar beam dwelling at each 1-degree azimuth sector. They can be utilized to improve the SNR of the passive detected target signal through coherent integration [18] to provide the required detection threshold signal-to-noise ratio SNRDT = 40 (or 16 dB).
Using a 20-pulse coherent integration scheme, the minimum SNR of the detected signal from any of the passive receivers in the detection cell in a single pulse is,
min 2DT
P
SNRSNRN (8)
where NP =20 is the number of radar echo pulses available for coherent integration during a 0.01s dwell of the radar beam at each 1-degree azimuth sector. Using the bi-static radar equation [2], the target-to receiver distance Rt2r is given by,
1/22
2 3 2min
13.2(4 ) ( )
T rt r
r sys
P GGR kmRLOS SNR L
(9)
where RLOS = 190 km is the idealized transmitter LOS distance, = 0.01 m2 (the missile RCS), Gr = 400 (receiver antenna gain of 26 dB), Lsys = 2 (i.e., 3 dB) is the passive system loss, r = kT = 5 x 10-15
W/MHz is the passive system receiver noise density, k = 1.38x10-23 W/K-Hz is the Boltzmann constant, T = 344° K is the noise temperature (temperature of the receiver front-end), and the values of the other parameters can be found in Table 1. The maximum distance between the target and a receiver in the passive cell cannot be greater than 13.2 km according to Equation (9). This maximum target-to-receiver distance gives an effective surveillance coverage area of 10 km by 6.6 km. This is illustrated in Figure 10.Each of the 4 passive sensors has a 100-degree field of view, providing a simultaneous coverage of the surveillance area defined by the trapezoidal-shaped box. The overlapping of the 100-degree FOV from the 4 receivers is shown by the yellow shaded areas inside the inverted trapezoid.
For a typical cruise missile speed of 280 m/s, a 6.6 km range window offers 24 s of additional detection time to monitor an incoming cruise missile travelling at a speed of 280 m/s; this would offer a maximum of 24 detection hits in confirming the presence of a target from an MPAR scanning at a frequency of 1 Hz. Serving as a “trip-wire” warning function, the passive detection unit provides a 6.5-min advanced warning to the primary radar of an incoming missile threat from 190 km out. This is illustrated in Figure 11.

16 DRDC-RDDC-2019-R027
Figure 10: Dimensions and area of coverage of a passive detection cell located at RLOS = 190 km.
Figure 11: A passive detection cell at RLOS = 190 km under the MPAR illumination.

DRDC-RDDC-2019-R027 17
4 Coherent integration and signal-to-noise ratio
4.1 Signal-to-noise ratio
In this section, a brief analysis will be given to describe the coherent integration process. Signal integration is an essential part of signal processing in the passive sensing scheme for extending the target detection range capability. Hence, a brief discussion on the topic will be helpful.
As discussed in Section 3 above, in order to exploit the MPAR illumination out to a distance of RLOS = 190 km, the detected SNR required is only 2. This has to be increased to a threshold value SNRDTof 40 in order to render a target signal detectable. Multiple-pulse integration is a common technique used to raise the SNR to the desired level necessary to meet the detection threshold. There are two approaches to multi-pulse processing to increase the SNR: a) coherent integration, and b) incoherent integration.
For coherent integration, the output SNRout from NP signal pulses is given by [18],
out P inSNR N SNR (10)
where NP is the number of signal sample pulses integrated, and SNRin is the signal-to-noise from a single detected signal pulse by a passive receiver.
For incoherent integration, the output SNRout is approximately given by,
0.5out P inSNR N SNR (11)
Thus, it is obvious that the coherent integration approach is preferred when a large output SNROUT is sought, but the SNRin is small and a large number of samples NP is required. For this reason, the coherent integration process will be considered here.
For the ranges and frequency under discussion, the radar signal can be treated as a plane wave; therefore, an ideal detected radar signal without noise at a range R and time t is given by [19],
( ) exp 2 ( )fs t A j R tc
(12)
where A is the signal amplitude and f is the radar centre frequency. A real-world detected signal containing noise can be modelled by inserting additive noise,
( ) ( ) ( )x t s t w t (13)

18 DRDC-RDDC-2019-R027
where w is the random noise in complex form with independent zero-mean Gaussian distributed over time for the real and imaginary parts. The SNR of a signal sample is defined as a ratio of the power in the signal component to the mean noise power; that is, SNR is given as [18],
2
2
signal peak power ASNRmean noise power
(14)
where 2 is the noise variance. For zero-mean Gaussian noise, it can be shown that 2 is equivalent to the mean noise power from the definition of variance [20].
As an illustration, a stationary target signal is first generated numerically for a MPAR (active radar) pulse detection; it is then assigned a SNRREC value of 40. Figure 12(a) shows the signal without any noise, and Figure 12(b) shows the same signal containing noise with a SNRREC = 40. Next, 20 noisy signal samples,each with a SNR of 2, are generated; this is shown in Figure 13 where each of the different signals is represented by a different colour and superimposed on the same plot. A general outline of the 20 target signals can be seen located between range bin numbers 7980 and 8000; they are clearly dominated by the noise. These noisy samples are then coherently integrated by summing the signals as described by Equation (13),
1( ) ( ) ( )
PN
n nn
X t s t w t (15)
The output integrated signal X(t) is shown in Figure 14(a). The empirical output SNRout from Figure 14(a) is,
5
5
62x10 41.31.5x10
sigout
noise
PSNR
P(16)
where Psig is the peak signal power, and Pnoise is the mean noise power. This SNROUT value compares quite well with the theoretical value given by Equation (10), SNRout = NP *SNRin = 20*2 = 40.

DRDC-RDDC-2019-R027 19
Figure 12: A detected stationary target signal (a): without added noise; and (b) with SNRREC = 40.
Figure 13: Samples of 20 noisy signals each with SNRREC = 2 from a stationary target, and each represented by a different colour.

20 DRDC-RDDC-2019-R027
Figure 14: Coherent integration: (a) of 20 noisy signals from a stationary target; (b) processing via the range-Doppler method (stationary target).
4.2 Moving target signals
In the detection of a moving target, the detected signal pulse is Doppler modulated in time in the phase of the target signal. This can be seen by re-expressing Equation (12) as,
0( ) exp 2 ( )fs t A j R vtc
(17)
The vt term produces a phase shift in time to the detected signal due to a moving target. This causes a dephasing in the coherent signal integration process given in Equation (15).
As an example, a missile has a cruising speed v = 280 m/s and is assumed approaching the receiver radially along the line of sight. A sequence of 20 detected target signals with a SNR = 2 from a moving target is shown in Figure 15. After applying the integration process in Equation (15) to the moving target signals given by Equation (17), the output X(R(t)) is shown in Figure 16(a). It is seen that there is no signal appearing in the integrated output. The Doppler modulation in the phase of the signals due to a moving target has severely degraded the coherent integration process of Equation (15), causing the signal samples to not add in phase.
One way to correct for the dephasing is to compensate for the Doppler modulation. This requires knowledge of the target’s radial velocity with respect to the receiver. In this passive sensor application with distributed sensors, this information may not be available, or acquiring the target’s velocity information may not be practical.
An alternative approach is the range-Doppler processing that is commonly used in Synthetic Aperture Radar (SAR) imaging. In range-Doppler processing, a sequence of NP radar signal samples are processed through a discrete Fourier transform,

DRDC-RDDC-2019-R027 21
1
, ,0
2 2exp( ( )) ( ) exp( )PN
n i k i i ik k P
fI A j R t w t j nkc N
(18)
where n is the Doppler index along the vertical axis of the range-Doppler diagram; n = 0, …, NP-1indexing the number of signal samples. The index i is indexing the range bin of the radar signal samples as illustrated in Figure 12. Note that (R0-vt) in Equation (17) is replaced by Ri(t) in Equation (18). This notation is used to differentiate between the moving target’s location Ri(t) within a signal sample and the target’s location R(t)n of a given signal sample. The indices n and i are known as the slow-time and fast-time in SAR terminology.
Applying the range-Doppler process of Equation (18) to the same 20 signal samples of Figure 15generates processed output in the form of a range-Doppler diagram as shown in Figure 17. The target image is represented by the dark pixels at the centre of the diagram, and the light grey speckles in the background of the image are the noise from the signal samples. By identifying the signal peak at the Doppler location where it appears, the amplitude profile running along the range direction gives the coherent integration signal of the moving target from the 20 signal samples. This integration signal is shown in Figure 16(b). The empirical SNROUT for the moving target signals is,
5
5
60x10 33.71.6x10
sigout
noise
PSNR
P(19)
This also compares well with the theoretical coherent integrated SNROUT = NP *SNRin = 20*2 = 40. The Fourier transform integrates the signal samples and coalesces the Doppler phase modulated information into the proper Doppler location in the range-Doppler diagram. This is effectively a coherent integration for a sequence of signal samples from a moving target. To verify that the range-Doppler process given in Equation (18) serves as a coherent integrator, the same sequence of 20 signal samples in Figure 13 for a stationary target is applied to Equation (18). The extracted integrated signal is shown in Figure 14(b). It can be seen that the output is identical to that shown in Figure 14(a) computed using the coherent integration given by Equation (15); the 2 outputs are identical in detail down to the floor noise.

22 DRDC-RDDC-2019-R027
Figure 15: Samples of 20 individual noisy signals each with SNRREC = 2 from a moving target.
Figure 16: Coherent integration (a) of 20 noisy signals from a moving target; and (b) processing via the range-Doppler method (moving target).

DRDC-RDDC-2019-R027 23
Figure 17: A range-Doppler diagram for the moving target.

24 DRDC-RDDC-2019-R027
5 Point defence application
Figure 18 depicts a scenario in which an MPAR system employs an add-on passive detection unit for detecting an incoming missile threat to an urban centre. The passive system is placed at a location that exploits the maximum MPAR transmitter line-of-sight distance of 190 km for detecting an incoming missile.
Passive detection of the target is modelled by the TDOA method as described in Section 3. Knowing the location of the sensors in geodetic coordinates (i.e., longitude, latitude), the target’s position in longitude, latitude and altitude can be determined and displayed on a geographical map for the operators to visualize. Figure 19 shows an enlarged view of the passive detection cell and its surveillance coverage area. The yellow line segment shows the simulated missile track as detected by the passive system; the thin white line represents the actual missile flight path (i.e., ground truth). The coloured circles representthe four receivers of the passive detection unit.
Since swarming tactics may become a norm in future warfare tactics, the ability of the passive detection system to detect simultaneous multiple targets entering the surveillance area is valuable. This is depicted in Figure 20 where 4 missiles are detected and localized at various time instants showing that the passive detection system can provide an unambiguous advanced warning of multiple threats.
Figure 18: A scenario of MPAR with an extended range provided by a passive cell for point defence against cruise missile.

DRDC-RDDC-2019-R027 25
Figure 19: An enlarged view of the surveillance area of the passive system.

26 DRDC-RDDC-2019-R027
Figure 20: Passive detection and localization of multiple targets.

DRDC-RDDC-2019-R027 27
6 Reducing the passive system’s complexity
It is shown in Section 4 that the passive detection system can provide early warning of threats to support the point-defence function of the active MPAR radar system. However, to cover the MPAR illumination out to 190 km (see Figure 11), a large number of passive detection cell units would be needed. In Section 3, it is determined that the passive cell size can only be 10 km wide as constrained by the MPAR’s transmitted power (see Figure 10). The arc length of the radar’s illumination front at 190 km covering an azimuth of 100 degrees is about 330 km. This means 33 passive cell units will be required to give a full extended-range coverage; this is illustrated in Figure 21. This requires 132 sets of receiving antennas and 100 units1 of RF signal receivers to form a sensor network to cover the 100-degree azimuth. Moreover, there is a large amount of data that has to be processed from the 33 passive units. This demands significant computing resources, data-link capacity and power consumption. The complexity of such network in terms of hardware and data processing requirements may render the passive range extension concept unfeasible economically.
Figure 21: Extended-range detection coverage at 190 km by 33 passive detection cell units.
If precise target localization is not really required, and only a “trip-wire” warning function is sought, then a big reduction in the number of RF receivers and receiving antennas is possible. Operating as “trip-wire,”only 2 receivers are required per passive cell unit instead of 4. For a network covering a 100-degree
1 This assumes that for each adjacent cell, only one RF processing unit with infrastructure (e.g., shelter, power) is required for 2 antennas.

28 DRDC-RDDC-2019-R027
azimuth, just 35 RF receivers and 66 antennas are needed, down from 100 receivers and 132 antennas for a full 4-receiver cell configuration. These may still be seen as excessively large numbers.
Further reduction can be made if the radar illumination front is moved back to the 126 km mark from the radar transmitter, instead of at 190 km. At a RLOS=126 km, a detected target SNR = 2 can be achieved with a target-to-receiver distance Rt2r ,
1/22
2 3 2min
20(4 ) ( )
T rt r
r sys
P GGR kmRLOS SNR L
(20)
This greater Rt2r distance enables the passive detection cell size to increase to 16 km in width as illustrated in Figure 22. The “trip-wire” alarm from a target travelling at 280 m/s and traversing through the 10km surveillance zone will offer 36s of target detection time, up from 24s in the scenario depicted in Figure 10. This longer monitoring time from the “trip-wire” function improves the target detection reliability.
Furthermore, the arc length of the radar illumination front at RLOS = 126 km covering a 100-degree azimuth is reduced to 220 km. Thus, only 14 passive cells with 2 receivers per unit are required. This works out to 16 RF receivers and 28 sets of antennas needed for the passive network covering the illumination front at RLOS = 126 km. Moreover, the 2-receiver “trip-wire” detection mode requires only 1 TDOA signal processing run instead of 3 for a 4-receiver configuration; this represents a 67% reduction in data processing requirements, allowing much quicker target detection response. Thus, the “trip-wire” may be a more practical set-up as it reduces the network complexity significantly. However, the advanced warning time to the primary radar system is reduced to 2.5 min, comparing to 6.5 min at 190 km. This is illustrated in Figure 23. Even with 2.5 min of warning, this is still a substantial amount of time for cueing the primary point-defence system to provide an effective response.

DRDC-RDDC-2019-R027 29
Figure 22: A bigger “trip-wire” detection cell unit at RLOS = 126 km.
Figure 23: Extended range detection coverage at 126 km with fewer passive cells.
If antenna arrays with directional capability, such as those shown in Figures 6 and 7, are not employed, then precise target localization is not possible with just a 2-receiver passive cell unit; however, an approximate target trajectory through the “trip-wire” zone can still be estimated. An initial target signal is detected by the passive cell with 2 receivers. This signal provides a TDOA measurement. However, no target altitude information is available from this 2-receiver system; 4 receivers are needed if target altitude is sought. But if the detected target can be assumed to cruise at an expected altitude, which is a

30 DRDC-RDDC-2019-R027
reasonable assumption to make when the target is still far from its destination, then the TDOA measurement can be used to generate a 2D hyperbolic curve at the assumed altitude. This curve, which represents all the possible locations (x, y) of the target, is illustrated in Figure 24(a).
When the target is first detected initially, it is assumed that the target is most likely near the top of the surveillance zone. The probable target location is therefore somewhere along the hyperbola, near the top; this is depicted in Figure 24(b). At the last detected target signal, it is reasonable to assume that the target is likely somewhere near the bottom of the surveillance zone. Thus, the probable target location is somewhere near the bottom of the hyperbola curve. This is depicted in Figure 24(c). Piecing the approximate locations from the first and last time instants together, an estimated probable target trajectory can hence be deduced. This is shown in Figure 24(d). This target trajectory information may be useful for the primary active radar to better track the threat as the missile comes into the primary radar’s detection range.
Figure 24: (a) all possible target locations, (b) estimated initial target location at t1,(c) estimated last target location at tL, (d) likely target trajectory.

DRDC-RDDC-2019-R027 31
7 Conclusions
The concept of deploying a passive sensing system as an add-on capability to extend the target detection range of a conventional radar system has been examined and it is found that such a hybrid active-passive combination appears to be feasible. By exploiting the active radar’s illumination at a substantial LOSrange, the passive system can provide advanced warning of incoming threats with low RCS, such as cruise missiles. Results from numerical analysis indicate that advanced warning times of the order of aseveral minutes or longer is possible, depending on the speed of the threat.
In concert with the advanced warning provided by the passive receiver network, this concept can provide a significant increase of available surveillance coverage area in addition to that which the primary radar (MPAR in short range mode) could provide by itself. Table 4 provides a comparison of the additional surveillance capability that might be provided for each of the four possible options noted earlier, along with the antenna resources required for each option.
Table 4: Passive surveillance options, benefits and antenna requirements for 360° azimuth coverage.
Option Active Coverage
Area (km2)
Approx.Passive
CoverageArea (km2)
Approx. Advance Warning
Time Generated
(min.)
No. of Cells
Needed
ReceiverAntennasNeeded
Passive MPAR Panels Needed
Long Range (190 km)
Tracking Option
17671 7742 6.5 119 476
Tripwire Option
17671 7742 6.5 119 238 952
Short Range (126 km)
Tracking Option
17671 7602 2.5 50 200
Trip Wire Option
17671 7602 2.5 50 100 400
Based on results shown in Table 4, then from a purely cost-benefit perspective, while considering only the antenna resources required per unit area of surveillance coverage generated, the last option would appear to be the best. For example, if (passive) MPAR panels were to be used to construct the passive antenna arrays, then the last option would give a metric of only 0.053 panels/km2 compared to the larger 0.07 panels/km2 required for the active MPAR antenna. By comparison, the second option, i.e., long range trip-wire, would require 0.122 panels/km2 which is roughly 75% greater than for the active MPAR system.
Another attribute of the passive sensing system is its reduced vulnerability during operation. It is shown in this study that a passive detection cell unit of 4 receivers can still be functional and offer warning if only 2 receivers continue to work after the other two fail for whatever reason. This built-in reliability and resilience would make passive sensing highly desirable as part of a point defence system.

32 DRDC-RDDC-2019-R027
In summary, passive sensing is a feasible concept for extending the detection range of an active primary surveillance radar to monitor stealthy low-observable threats. Such systems could allow several minutes of advanced warning and could be used to cue primary surveillance radar and weapon systems; this would help to improve the effectiveness of point defence of urban centres against cruise missiles threateningcritical infrastructure assets.

DRDC-RDDC-2019-R027 33
References
[1] Industry Canada, “Radio Spectrum Inventory: A 2010 Snapshot of Canada,” 16 June 2011, 251 pages,available at: https://www.ic.gc.ca/eic/site/smt-gst.nsf/vwapj/Inventory-e.pdf/$FILE/Inventory-e.pdf(accessed 21 January 2017)
[2] Wong, S., Jassemi-Zargani, R., Brookes, D., Kim, B., “Passive target localization using a geometric approach to the time-difference-of-arrival method,” Defence Research and Development Canada, Scientific Report, DRDC-RDDC-2017-R079, 77 pages, June 2017.
[3] Wong, S., Jassemi-Zargani, R., Brookes, D., Kim, B., Kaluzny, B., “Target localization over the Earth’s curved surface,” Defence Research and Development Canada, Scientific Report, DRDC-RDDC-2018-R136, 38 pages, May 2018.
[4] Cho, J. Y. N., Duffy, S.M., and Grappel, R.D. “Multifunction Phased Array Radar (MPAR) Spectral Usage Analysis,” Lincoln Laboratory, project report ATC-395, 24 July 2012.
[5] Skolnik, M.I. (editor), “Radar Handbook,” Third Edition, Editor, McGraw-Hill, New York, 2008.
[6] Wikipedia: “Kh-555,” Updated 27 September 2014, available at: https://en.wikipedia.org/wiki/Kh-555(accessed November 2015).
[7] Wikipedia: “Cruise missile,” available at: https://en.wikipedia.org/wiki/Cruise_missile#Russia(accessed November 2015).
[8] FAS: “Weapons of Mass Destruction: WMD Around the World: Kh-65/Kh-SD, Kh-101,” Updated: 2000, available at: https://fas.org/nuke/guide/russia/bomber/kh-101.htm (accessed November 2015).
[9] Jane’s Missiles and Rockets: Air to Surface, “Russia deploys conventional-warhead cruise missile,” Posted 23 April 2003, available at: https://janes.ihs.com/Janes/Display/jmr00639-jmr-2003 (accessed November 2015).
[10] Jane’s Air Launched Missiles: Air to Surface, “Kh-101, Kh-102,” posted 28 September 2017,available at: https://janes.ihs.com/Janes/Display/jalw3712-jalw (accessed November 2015).
[11] Nuclear Threat Initiative, “Russian Heavy Bomber Force Overview,” posted 11 May 2009,available at: http://www.nti.org/analysis/articles/heavy-bomber-force-overview/, (accessed November 2015).
[12] Motorola Inc. CSG, “Iridium Subscriber License Information,” Rev 1.26b, available at: http://marine.rutgers.edu/~kerfoot/pub/slocum/RELEASE_6_32/src/doco/specifications/iridium-phone/IR_Lband.doc.rtf (accessed June 2014).
[13] Stein, S. “Algorithms for ambiguity function processing,” IEEE Transactions on Acoustics, Speech, and Signal Processing, Vol. ASSP-29, No.3 pp.588–599, June 1981.

34 DRDC-RDDC-2019-R027
[14] Henriksen, S. “Unmanned Aircraft Control and ATC Communications Bandwidth Requirements,”NASA/CR-2008-214841, 2008.
[15] Wikipedia: “AN/SPY-1,” available at: https://en.wikipedia.org/wiki/AN/SPY-1 (accessed November 2015).
[16] Freehafer, J.E, Kerr, D.E. (editor/co-author), “Propagation of Short Radio Waves,” Vol. 13 M.I.T. Radiation Laboratory Series, First Edition, McGraw-Hill Book Co. Inc, p. 53, 1951.
[17] Taylor, T.T., “Design of line source antennas for narrow beamwidth and low sidelobes,”Transactions of the IRE Professional Group on Antennas and Propagation, Vol. 3, Issue 1, pp. 16–28,January 1955.
[18] Richards, M.A., “Fundamentals of Radar Signal Processing,” McGraw-Hill, New York, 2005.
[19] Scheer, J.A., Kurtz, J.L. (editors), “Coherent Radar Performance Estimation,” Artech House, Boston, 1993.
[20] Bracewell, R.N., “The Fourier Transform and its Applications,” McGraw-Hill Book Co. Inc,New York, 1965.
[21] Berkowitz, R.S. “Modern Radar,” John Wiley & Sons Inc., 1965.
[22] Skolnik, M. (editor), “Radar Handbook,” Second Edition, McGraw-Hill, 1990.
[23] Poisel, A.P., “Electronic Warfare Target Location Methods,” Artech House, Boston, 2005.

DRDC-RDDC-2019-R027 35
Annex A TDOA for analyzing reflected signal from a target
Time-Difference-Of-Arrival (TDOA) detection of scattered signal from a target can be treated as if the target is transmitting the signal. That is, the passive RF emitter detection model which is normally used to describe the TDOA process can be applied. The schematic shown in Figure A.1 illustrates the detection of scattered signal from a target by a pair of passive receivers. A radar transmitter is serving as the illumination source. The radar signal scattered off an air target is detected by 2 stationary receivers on the ground. The 2 ground receivers are time synchronized in conducting the TDOA processing.
Figure A.1: Detecting an illuminated target using the TDOA mode.
As seen in Figure A.1, an emission emanated from the radar transmitter T is illuminating an air target a.The signal seen by receiver S1 at time t can be described in 2 separate segments: the first segment describes the transmitter’s signal arriving at the target, and the second segment describes the scattered signal by the target as seen by the receiver. In the first segment, the signal as seen by the target is given by Equation (A.1) [21],
0( )( ) ( )exp( 2 )exp( 2 )Ta
aR ts t a t j f t j f
c(A.1)
where RTa/c is the time delay for the emitting signal to travel from the transmitter to the target, and
( ) | ( ) |Ta a TR t R tv (A.2)
is obtained by expanding the time-varying range RTa(t) using a first-order Taylor series. R is the distance between the transmitter and the target (see Figure A.1) at time t = 0, i.e., at the beginning of the data collection of s1(t). The term |(va)|T is the radial component of the target’s velocity with respect to the transmitter. In the second segment, the signal detected by receiver S1 is given by,

36 DRDC-RDDC-2019-R027
11 1
( )( ) ( )exp( 2 )aa
R ts t s t j fc
(A.3)
where 1 is the scattering coefficient of the radar signal amplitude scattered from the target, as seen by receiver S1, and Ra1(t)/c is the time delay of the scattered signal from the target to receiver S1 with,
1 1 1( ) | ( ) |a aR t d tv (A.4)
where d1 is the distance from the target to receiver S1, and |(va)|1 is the radial component of the target’s velocity with respect to receiver S1.
The signal seen by receiver S1 emanated from the transmitter and scattered off the target can be expressed by substituting Equations (A.1) into (A.3),
11 1 0
1 1 1
1 1 1
1 1 1
( ) ( )( ) ( )exp( 2 )exp( 2 )exp( 2 )
( )exp( 2 )exp 2 ( | | ) ( | | )
( )exp( 2 )exp 2 ( ) (| | | | )
( )exp 2
Ta a
a T a
a T a
D
R t R ts t a t j f t j f j fc c
fA t j f t j R t d tcfA t j f t j R d tc
t j f t
v v
v v
(A.5)
Where,
11
1 1(| | | | )D a T a
R dcffc
v v(A.6)
In Equations (A.5) and (A.6), 1 is the total time delay and fD1 is the Doppler shift of the signal as seen by receiver S1. Similarly, the signal seen by receiver S2 emanated from the transmitter and scattered off the target can be expressed as,

DRDC-RDDC-2019-R027 37
22 2 0
2 2 2
2 2 2
2 2 2
( ) ( )( ) ( )exp( 2 )exp( 2 )exp( 2 )
( )exp( 2 )exp 2 ( | | ) ( | | )
( )exp( 2 )exp 2 ( ) (| | | | )
( )exp 2
Ta a
a T a
a T a
D
R t R ts t a t j f t j f j fc c
fA t j f t j R t d tcfA t j f t j R d tc
t j f t
v v
v v
(A.7)
Where,
22
2 2(| | | | )D a T a
R dc
ffc
v v(A.8)
The distance d2 is from the target to receiver S2, and |va|2 is the radial component of the target’s velocity with respect to receiver S2. A generalized cross-ambiguity function for the signals detected by the 2 time-synchronized receivers is given by Equation (A.9) [22],
*1 2 ,1 ,2 1 1 2 2 ,2 ,1( , , , ) ( ) ( )exp( 2 ( ) )D D D Df f t t j f f t dt (A.9)
By letting t0 = t – 1; then t = t0 + 1. Hence, t – 2 = (t0 + 1) – 2 = t0 – ( 2 – 1). Furthermore, introduce the following:
2 1 2 12 1
2 1
2 1
2 1
( ) ( )
(| | | | ) (| | | | )
(| | | | )
D D D
a T a a T a
a a
R d R d d dc c c
f f ffcfc
v v v v
v v
(A.10)
The variables and fD describe the TDOA process and the FDOA (Frequency Difference Of Arrival) process respectively [23]. By re-defining the variable t0 as t and substituting and fD of Equation (A.10)into Equation (A.9), Equation (A.9) can then be rewritten as,

38 DRDC-RDDC-2019-R027
*1 2( , ) ( ) ( )exp( 2 )D Df t t j f t dt (A.11)
Equation (A.11) gives the conventional form of the ambiguity function, but now with (TDOA) and fD(FDOA) as variables.
From Equation (A.10), it can be seen that the TDOA measurement is made between the target and receivers S1 & S2 only. In addition, the FDOA measurement fD is also a function of the Doppler as seen by receivers S1 & S2 only. In other words, both and fD have no dependence on the radar transmitter. Hence, it is shown in the above analysis that signal processing of the reflected signal off the target can treat the target as if it is the source of the RF emission.

DRDC-RDDC-2019-R027 39
List of symbols/abbreviations/acronyms/initialisms
COTS Commercially-Off-The-Shelf
dBW Decibels relative to 1 Watt
DRDC Defence Research and Development Canada
FDOA Frequency Difference Of Arrival
FOV Field-Of-View
GHz Giga (109) Hz
Hz Hertz (1s-1)
LOS Line-Of-Sight
Microsecond (10-6 seconds)
MHz Mega (106) Hz
MPAR Multifunction Phased Array Radar
PRF Pulse Repetition Frequency
RLOS Radar LOS distance
SNR Signal to Noise Ratio
TDOA Time-Difference-Of-Arrival
W Watt(s)

DOCUMENT CONTROL DATA*Security markings for the title, authors, abstract and keywords must be entered when the document is sensitive
1. ORIGINATOR (Name and address of the organization preparing the document.A DRDC Centre sponsoring a contractor's report, or tasking agency, is entered in Section 8.)
DRDC – Ottawa Research CentreDefence Research and Development Canada, Shirley's Bay3701 Carling AvenueOttawa, Ontario K1A 0Z4Canada
2a. SECURITY MARKING(Overall security marking of the document including special supplemental markings if applicable.)
CAN UNCLASSIFIED
2b. CONTROLLED GOODS
NON-CONTROLLED GOODSDMC A
3. TITLE (The document title and sub-title as indicated on the title page.)
A hybrid active-passive radar system concept for extending target detection range
4. AUTHORS (Last name, followed by initials – ranks, titles, etc., not to be used)
Brookes, D.; Wong, S.; Jassemi-Zargani, R.; Kim, B.
5. DATE OF PUBLICATION(Month and year of publication of document.)
March 2019
6a. NO. OF PAGES(Total pages, including Annexes, excluding DCD, covering and verso pages.)
45
6b. NO. OF REFS(Total references cited.)
23
7. DOCUMENT CATEGORY (e.g., Scientific Report, Contract Report, Scientific Letter.)
Scientific Report
8. SPONSORING CENTRE (The name and address of the department project office or laboratory sponsoring the research and development.)
DRDC – Ottawa Research CentreDefence Research and Development Canada, Shirley's Bay3701 Carling AvenueOttawa, Ontario K1A 0Z4Canada
9a. PROJECT OR GRANT NO. (If appropriate, the applicable research and development project or grant number under which the document was written. Please specify whether project or grant.)
9b. CONTRACT NO. (If appropriate, the applicable number under which the document was written.)
10a. DRDC PUBLICATION NUMBER (The official document number by which the document is identified by the originating activity. This number must be unique to this document.)
DRDC-RDDC-2019-R027
10b. OTHER DOCUMENT NO(s). (Any other numbers which may be assigned this document either by the originator or by the sponsor.)
11a. FUTURE DISTRIBUTION WITHIN CANADA (Approval for further dissemination of the document. Security classification must also be considered.)
Public release
11b. FUTURE DISTRIBUTION OUTSIDE CANADA (Approval for further dissemination of the document. Security classification must also be considered.)
12. KEYWORDS, DESCRIPTORS or IDENTIFIERS (Use semi-colon as a delimiter.)
Radar; multifunction phased array radar; Radar Architecture; radar range extension; Time-Difference-Of-Arrival; TDOA; Frequency Difference of Arrival; FDOA; MPAR; passive receiver system

13. ABSTRACT (When available in the document, the French version of the abstract must be included here.)
A hybrid active-passive radar system is proposed to extend the target detection range of an air surveillance system. Passive sensing is employed to exploit the illumination power of the radar system. This scheme makes use of the radar’s illumination power propagating to the maximum Line-Of-Sight (LOS) distance to monitor the target echoes reflected at this extended range by the passive sensors. In effect, the passive receivers are tasked to pick up the target echoes well before the primary active radar system. A particular application of this system concept is point defence against cruise missiles threatening the critical infrastructure assets of urban areas.
The line-of-sight distance that the radar’s illuminating power can reach is often substantially greater than the radar’s designed detection range. A passive sensor system can be placed farther forward, near the radar’s LOS illumination range, to provide a “trip-wire” warning which can also be used to cue the radar where to focus the search, and to point a defensive weapon system in the direction of the incoming target is incoming to provide a better chance of success in mitigating the threat.
A model of a passive sensing system working in conjunction with an air-surveillance radar system has been developed. Results indicate that the add-on passive system can work effectively to extend the target detection range, augmenting the capability of the radar system against targets with very low radar cross sections such as cruise missiles.
Un système radar actif-passif hybride est proposé pour étendre la portée de détection des cibles d’un système de surveillance aérienne. La détection passive est utilisée pour exploiter la puissance d’illumination du système radar. Cette méthode exploite la puissance d’illumination du radar qui se propage vers la distance maximale en visibilité directe (LOS) pour que les capteurs passifs puissent surveiller les échos réfléchis par les cibles à cette distance accrue. En fait, les récepteurs passifs doivent capter les échos des cibles bien avant le système radar actif primaire. Une application particulière de ce modèle de système est la défense au but contre des missiles de croisière qui menacent les infrastructures essentielles des zones urbaines.
La distance en visibilité directe que la puissance d’illumination du radar peut atteindre est souvent beaucoup plus grande que la portée de détection prévue du radar. On peut placer unsystème de capteurs passifs plus vers l’avant, près de la portée d’illumination en LOS du radar, pour fournir un avertissement de type « fil-piège » qu’on peut également utilisé afin d’indiquer au radar où concentrer la recherche, et pour pointer un système d’armes défensives dans la direction de la cible en rapprochement en vue d’améliorer les chances de réussir à réduire la menace.
On a développé un modèle de système de détection passive fonctionnant en conjonction avec un système de radar de surveillance aérienne. Selon les résultats, le système passif supplémentaire peut fonctionner efficacement pour étendre la portée de détection de la cible, augmentant ainsi la capacité du système radar contre les cibles à très faible surface équivalente radar, comme les missiles de croisière.











![[Luma’tul Itiqadh] The Illuminating Creed](https://img.pdfslide.us/doc/110x75/55527e50b4c905b4598b4cf9/lumatul-itiqadh-the-illuminating-creed.jpg)