Embed Size (px)
Citation preview

A High Performance Multi-layer Reversible Data Hiding Scheme Using
Two-Step Embedding
Authors: Jinxiang Wang Jiangqun Ni Jinwei Pan

Outline
Histogram Shifting on Pixel Differences HS for single layer embedding HS for multi-layer embedding
Two-Step Embedding Framework (TSE) Improvement for Reduction the Location Map Traditional location map generation The improvement scheme for reduction location map size
Embedding Process Extraction Process Experimental Results

Histogram shifting algorithm
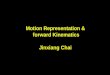
Traditional histogram shifting algorithm (HS) Traditional histogram shifting algorithm is based on the pixel values,
which utilizes the redundancy of the host image statistical information to
hide secret data, the sketch map is shown as follows.
Grayscale value
Fre
quen
cy
Peak point
Lowest point
non-zero point situation
Zero point Grayscale value
Grayscale value
Fre
quen
cy
Grayscale value
Fre
quen
cy
Peak point
zero point situationF
requ
ency
Zero point
Peak point
wEmbedding

Note:1) The extraction is performed in the reverse
order as the embedding process. 2) The side information (peak/zero points) should
be additionally transmitted to the receiver for reversible recovery.——No blind
3) The histogram shifting is extended to the pixel differences or predictive errors to improve the performance

Histogram shifting on the pixel differences
1| |i i id x x
d
FrequencyHistogram shifting
d’
Pixel differences calculation ‘d’
Generate the histogram of pixel differences
Generate the marked pixel differences ‘d’’
1 1
1 1
,
,i i i i
ii i i i
x d x xy
x d x x
Generate the marked pixel values ‘y’
'
1, ,
,
,
i i
i i i
i
d d U P Z
d d w d P
d otherwise
Note:1) P and Z should be additional
transmitted to the receiver.2) The process represents the
single layer embedding

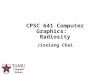
Multi-layer embedding When the size of secret data is large, the generated stego-image (stego-differences) is repeatedly considered as a new cover image (cover differences) to perform a new round histogram shifting to
hide more message. The multi-layer embedding is described as follows.
Stego- image
Pixel differences
Original
image
1th layer …… mth layerMarked pixel differences
P1,Z1 Pm,Zm
Note: the side information {Pi,Zi | 1≤i ≤m} should be additional transmitted

Two-Step Embedding Framework
Purpose: 1) To solve the issue of needing to transmit the side information
additionally. —— No blind
2) To ensure the optimal peak/zero points selection among HS to
improve the performance. TSE for single layer embedding
A1
optimal selectionhistogram peak / zero points
first
LSB replacement
Replaced LSBs
Stego Image
pixel differences
Originalimage
second
StegoA2
Stego

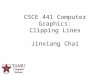
TSE for multi-layer embeddingNote: 1) TSE is employed in the final layer embedding;2) The LSB substitution is performed on the stego-pixels.
mth layer (TSE)
A1
A2
Stego- image
Pixel differences
Original
image
1th layer …… (m-1)th layer
Framework of two-step embedding for multi-layer embedding

The characteristic of TSE:1) TSE is an improved LSB based scheme, which hides the side
information in the LSBs of the chosen stego-pixels in A1 to achieve the blind requirement.
2) Without consuming some intact fixed area to hide side information in the traditional schemes, our scheme utilizes the LSB in the stego-pixels.
3) The flexible optimal peak/zero point ensures the better performance.

Improvement for Reduction the size of Location Map
Location map: Due to the modification on the pixel differences to hide
secret data, the marked differences may be not in the normal range [0, 255] for a 8-bit grayscale image.
Thus the location map is needed to record the special overflow/underflowed pixels and embedded in the cover image together with the secret message.
The location map can be recovered by the receiver to lossless restore the original image.

Traditional method for the location map generation
1 1( ') ( ) 'i i i i i i i iy x x d x d d d m
Each layer HS embedding leads to at most 1 unit distortion between marked difference di’ and original difference di. Thus, the difference between the stego-pixel and original pixel via m - layer embedding is
The potentially overflowed/underflowed pixels (POPs) is in the range and should be specially handled as follows.
0, 1 255 1,255m m

:POPs
Cover image
1) Locate all the POPs in the interval 0, 1 255 1,255m m
2) Use histogram narrowing technique (HN) to narrow the POPs to the middle grayscale value and generate a new narrowed cover image I’
'
( ) [0, 1]
( ) [255 1,255]i
i i
i
x m I i m
x x m I i m
x otherwise
3) After m-layer embedding on the narrowed image I’, no overflow/underfow occurs. 4) Generate a same sized location map with ‘1’ and ‘0’ to indicate the narrowed pixels and non-narrowed pixels. 5) Compress the location map and hide the compressed version in the cover image.

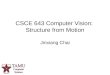
General idea: we exchange the histogram narrowing technique int
o the final layer embedding process and only indicate the actually overflowed/underflowed pixels (AOPs), which is a subset of the POPs.
Thus the improved location map with less ‘1’ in it will be easier to be compressed. The detailed TSE for the reduction of the location map is described as follows.
Improvement for Reduction the size of Location Map

R_POPs in A2
w={w(1), w(2), w(3)}
w(1)
w(2)
LM + SI
POPs
R_POPs in A1
A1
HS embedding
LSB replacement
HS embedding
LM
LSBs
AOPs
:POPs
A1
A2
Cover image Pixel differences
HS embeddingA1
A2
w(3)+LSBs
The sketch map of TSE for location map reduction

Embedding Process
1) Calculate the pixel differences
2) Determine the embedding layer ‘m’
3) Identify the POPs in cover image with gray value in the range
4) Perform the front (m-1)-layer embedding
5) Implement the TSE in the final layer embedding.
0, 1 255 1,255m m
Note: Among the process, the compressed location map and side information for each layer are together hidden in the image in step 5. Moreover, the histogram narrowing technique is utilized in the same step.

Extraction Process
1) Divide the stego-image into A1 and A2 as did in embedding side, and collect the side information from the LSBs of the marked pixels in A1.
2) Decompress and generate the location map to indicate the actually overflowed/underflowed pixels (AOPs). Perform the inverse HN operation on the AOPs.
3) Perform the m-layer extraction operation in the inverse order and recover the original cover image.

The TSE framework extended to other prediction errors
One prediction model:
X O X O X
O X O X O
X O X O X
O X O X O
X O X O X
(1)(2) (4)
(3)
xx x x
x
(a) (b)
1 2 3 4
4
x x x xx
%
~
( )d x x
The multilayer embedding is iteratively performed between the ‘cross’ set and ‘round’ set . And the successive prediction utilizes the generated stego-pixels in opposite set. The (i+1) th layer embedding process is illustrated.
' 1 ' 1O O OO (1) (2) (3) (4) 4 O O ( ) O O ( ) Oi i i i i i i i i i i i i iX X X X X d d d
% % %( )

Experimental Results
The Efficiency for Location Map Reduction between the traditional method and our improved scheme
| |_ 100%t i
i
LM LME Map
LM
Where LMt and LMi denote the size of traditional and improved location map, respectively.

mCover image(512×512)
chosen schemes1 2 3 4 5
Lena
Traditional location map [18] 20 20 20 20 20
Improved location map 20 20 20 20 20
Overflow/Underflow N N N N N
E_Map -- -- -- -- --
Peppers
Traditional location map [18] 100 240 740 2160 4380
Improved location map 100 220 620 1320 2100
Overflow/Underflow Y Y Y Y Y
E_Map 0% 9.1% 19.4% 63.6% 108.6%
Baboon
Traditional location map [18] 1120 1760 2480 3080 3520
Improved location map 160 240 280 360 340
Overflow/Underflow Y Y Y Y Y
E_Map 600% 633.3% 785.7% 755.6% 935.3%
F16
Traditional location map [18] 20 20 20 20 20
Improved location map 20 20 20 20 20
Overflow/Underflow N N N N N
E_Map -- -- -- -- --
Goldhill
Traditional location map [18] 20 20 20 20 20
Improved location map 20 20 20 20 20
Overflow/Underflow N N N N N
E_Map -- -- -- -- --
Boat
Traditional location map [18] 200 480 800 1320 2980
Improved location map 180 320 460 620 780
Overflow/Underflow Y Y Y Y Y
E_Map 11.1% 50% 73.9% 112.9% 282.1%

Comparison Between the TSE in Pixel Differences, in Predictive Errors and Other Schemes
TSE_PD_TM: TSE + Pixel differences + traditional location map TSE_PD_IM: TSE + Pixel differences + improved location map TSE_PE_IM: TSE + prediction errors + improved location map
[18] Tai W. L., Yeh C. M., Chang C. C.: Reversible Data Hiding Based on Histogram Modification of Pixel Differences. IEEE Trans. Circuits Syst. Video Technol., vol. 19, no. 6, pp. 906-910 (2009)[19] Luo L., Chen Z., Chen M., Zeng X., Xiong Z.: Reversible Image Watermarking Using Interpolation Technique. IEEE Trans. Inf. Forensics Security, vol. 5, no. 1, pp.187–193 (2010)[13] Hwang J., Kim J., Choi J.: A Reversible Watermarking Based on Histogram Shifting. In: Proc. International Workshop on Digital Watermarking. pp. 348-361. Jeju Island, Korea (2006)


Conclusion
1) The proposed scheme exploits TSE to solve the problem of communicating side information. The TSE framework also ensures the adoption of optimal peak and zero point pair in each layer for high performance reversible data hiding.
2) An improved location map, which indicates only the actual overflow/underflow pixels, is constructed to facilitate the compression of location map and further increase the embedding capacity.

Thank you!