Embed Size (px)
Citation preview

Brigham Young University Brigham Young University
BYU ScholarsArchive BYU ScholarsArchive
Theses and Dissertations
2021-12-13
A Geometric Approach to Multiple Target Tracking Using Lie A Geometric Approach to Multiple Target Tracking Using Lie
Groups Groups
Mark E. Petersen Brigham Young University
Follow this and additional works at: https://scholarsarchive.byu.edu/etd
Part of the Engineering Commons
BYU ScholarsArchive Citation BYU ScholarsArchive Citation Petersen, Mark E., "A Geometric Approach to Multiple Target Tracking Using Lie Groups" (2021). Theses and Dissertations. 9354. https://scholarsarchive.byu.edu/etd/9354
This Dissertation is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected].

A Geometric Approach to Multiple Target Tracking
Using Lie Groups
Mark E. Petersen
A dissertation submitted to the faculty ofBrigham Young University
in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
Randal W. Beard, ChairCammy K. PetersonTim W. McLainMarc D. Killpack
Department of Electrical and Computer Engineering
Brigham Young University
Copyright © 2021 Mark E. Petersen
All Rights Reserved

ABSTRACT
A Geometric Approach to Multiple Target TrackingUsing Lie Groups
Mark E. PetersenDepartment of Electrical and Computer Engineering, BYU
Doctor of Philosophy
Multiple target tracking (MTT) is the process of localizing targets in an environmentusing sensors that perceive the environment. MTT has many applications such as wildlifemonitoring, air traffic monitoring, and surveillance. These applications motivate furtherresearch in the different challenging aspects of MTT. One of these challenges that we willfocus on in this dissertation is constructing a high fidelity target model.
A common approach to target modeling is to use linear models or other simplifiedmodels that do not properly describe the target’s pose (position and orientation), motion,and uncertainty. These simplified models are typically used because they are easy to im-plement and computationally efficient. A more accurate approach that improves trackingperformance is to define the target model using a geometric representation of the target’snatural configuration manifold. In essence, this geometric approach seeks to define a tar-get model that can express every pose and motion of the target while preserving geometricproperties such as distances and angles.
We restrict our discussion of MTT to objects that move in physical space and canbe modeled as a rigid body. This restriction allows us to construct generic geometric targetmodels defined on Lie groups. Since not every Lie group has additional structure thatpermits vector space arithmetic like Euclidean space, many components of MTT such asdata association, track initialization, track propagation and updating, track association andfusing, etc, must be adapted to work with Lie groups.
The main contribution of this dissertation is the presentation of a novel MTT algo-rithm that implements the different MTT components to work with target models defined onLie groups. We call this new algorithm, Geometric Multiple Target Tracking (G-MTT). Thisdissertation also serves as a guide on how other MTT algorithms can be modified to workwith geometric target models. As part of the presentation there are various experimentalresults that strengthen the argument that a geometric approach to target modeling improvestracking performance.
Keywords: multiple target tracking, data association, PDA, IPDA, LG-IPDA, Lie group,track fusion, track association, centralized measurement fusion, Recursive RANSAC

ACKNOWLEDGMENTS
I am grateful for the support of the Center for Unmanned Aircraft Systems (C-UAS),
a National Science Foundation Industry/University Cooperative Research Center (I/UCRC)
under NSF award Numbers IIP-1161036 and CNS-1650547, and the support of the C-UAS
industry members who have made possible my research on geometric target tracking.
I am thankful for the mentorship, guidance and support of Dr. Randal Beard, whose
expertise and patience empowered me to become a more competent student and researcher.
His contagious enthusiasm for knowledge and theory inspired me to broaden and deepen
my own understanding, which greatly influenced my research. I am also grateful for the
other professors on my committee who have helped me through their teachings, and have
charitably given of their time and expertise to guide me in my research.
My journey as a researcher would not have been nearly as enriching and rewarding
without my fellow students who have helped and encouraged me immensely throughout
these past few years. Specifically Parker Lusk who helped me immensely with programming
and other theoretical concepts, Devon Morris who I have conversed with numerous times
on mathematical theory and other subjects, Jacob Johnson who was willing to review and
provide feedback on my work, and Jaron Ellingson for collaborating with me on the project
Multiple Target Tracking on SE (3) presented in Chapter 13.
I am grateful for the love and support of my family who have encouraged me during
this undertaking. I am especially grateful for my wife Nicole Petersen, for her patience and
time that she has given me to pursue my PhD, for the love and encouragement she freely
offers me, and for all acts of kindness that I never knew. Above all, I am indebted to God
who has given me all that I have and has helped me accomplish all that I have done.

TABLE OF CONTENTS
Title Page . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
Chapter 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Target Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.1 Why Non-Geometric, Linear Models Sometimes Fail . . . . . . . . . . 41.1.2 Why Non-Geometric Non-Linear Models Sometimes Fail . . . . . . . 101.1.3 Interactive Multiple Models . . . . . . . . . . . . . . . . . . . . . . . 161.1.4 Lie Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2 Tracking Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.1 Nearest Neighbor Filter . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.2 Global Nearest Neighbor Filter . . . . . . . . . . . . . . . . . . . . . 191.2.3 Probabilistic Data Association Filter . . . . . . . . . . . . . . . . . . 201.2.4 Joint Probabilistic Data Association Filter . . . . . . . . . . . . . . . 201.2.5 Multiple Hypothesis Tracking . . . . . . . . . . . . . . . . . . . . . . 211.2.6 Probabilistic Multi-Hypothesis Tracker . . . . . . . . . . . . . . . . . 221.2.7 Probabilistic Hypothesis Density Algorithm . . . . . . . . . . . . . . 221.2.8 KALMANSAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.2.9 R-RANSAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.3 Summary of Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.4 Dissertation Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Chapter 2 Overview of Geometric MTT . . . . . . . . . . . . . . . . . . . . 27
2.1 Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2 Data Management: Items 1-5 in Fig. 2.1 . . . . . . . . . . . . . . . . . . . . 302.3 Track Initialization: Items 6-8 in Fig. 2.1 . . . . . . . . . . . . . . . . . . . . 312.4 Track Management: Items 9-12 in Fig. 2.1 . . . . . . . . . . . . . . . . . . . 322.5 Summary of Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Chapter 3 Lie Group Review . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1 Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
iv

3.1.1 Group Action . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2 Topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3 Riemannian Manifold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4 Lie Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4.1 Adjoints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.4.2 Exponential Map at Identity . . . . . . . . . . . . . . . . . . . . . . . 473.4.3 Jacobians of the Exponential Map . . . . . . . . . . . . . . . . . . . . 503.4.4 Direct Product Group . . . . . . . . . . . . . . . . . . . . . . . . . . 513.4.5 First Order Taylor Series and Partial Derivatives . . . . . . . . . . . 523.4.6 Expressing Uncertainty on Lie Groups . . . . . . . . . . . . . . . . . 53
Chapter 4 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.1 System Affinization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.2 Transforming Measurements and States . . . . . . . . . . . . . . . . . . . . . 614.3 Extending the Observation Function with State Transformations . . . . . . . 64
Chapter 5 Measurement Management . . . . . . . . . . . . . . . . . . . . . . 66
Chapter 6 Lie Group Integrated Probabilistic Data Association Filter . 70
6.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726.2 Prediction Step . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.3 Data Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 786.4 Update Step . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.4.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.5 Experiment and Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 906.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Chapter 7 Centralized Measurement Fusion . . . . . . . . . . . . . . . . . . 95
7.1 Parallel Centralized Measurement Fusion with the LG-IPDAF Overview . . . 977.2 Augmented System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1007.3 MS-LG-IPDAF Update Step . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.3.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1087.4 Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.4.1 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1107.4.2 Simulated Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . 114
7.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Chapter 8 Track Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
8.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1208.2 RANSAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
8.2.1 Generating a State Hypothesis . . . . . . . . . . . . . . . . . . . . . . 1238.2.2 Finding the Inlier Measurements to a State Hypothesis . . . . . . . . 1268.2.3 Computing the Score of a State Hypothesis . . . . . . . . . . . . . . . 1278.2.4 Initializing a New Track . . . . . . . . . . . . . . . . . . . . . . . . . 128
v

Chapter 9 Track-to-Track Association and Fusion . . . . . . . . . . . . . . 129
9.1 Track-to-Track Association . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1309.2 Track-to-Track Fusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Chapter 10 Measurement Latency . . . . . . . . . . . . . . . . . . . . . . . . . 137
10.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13810.2 Updating With a Latent Measurements . . . . . . . . . . . . . . . . . . . . . 141
Chapter 11 End-To-End MTT Framework . . . . . . . . . . . . . . . . . . . . 144
11.1 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14511.2 Visual Front End . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
11.2.1 KLT Feature Tracker . . . . . . . . . . . . . . . . . . . . . . . . . . . 14811.2.2 Estimate Homography . . . . . . . . . . . . . . . . . . . . . . . . . . 14811.2.3 Estimate Essential Matrix . . . . . . . . . . . . . . . . . . . . . . . . 15111.2.4 Moving / Non-moving Segmentation . . . . . . . . . . . . . . . . . . 153
11.3 R-RANSAC Multiple Target Tracker . . . . . . . . . . . . . . . . . . . . . . 15511.3.1 Data Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15611.3.2 Track Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15811.3.3 Track Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
11.4 Track Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16111.5 Target Following Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
11.5.1 Following Multiple Targets . . . . . . . . . . . . . . . . . . . . . . . . 16411.6 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16511.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Chapter 12 Tracking on SE(2) Using a Monocular Camera . . . . . . . . . 167
12.1 Normalized Virtual Image Plane . . . . . . . . . . . . . . . . . . . . . . . . . 16812.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
12.2.1 System Affinization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17112.3 Proving Local Observability . . . . . . . . . . . . . . . . . . . . . . . . . . . 17212.4 Seeding Track Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . 17512.5 Transforming Measurements and Tracks . . . . . . . . . . . . . . . . . . . . 17712.6 Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18212.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Chapter 13 Tracking on SE(3) Using a Monocular Camera . . . . . . . . . 185
13.1 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18613.1.1 System Model SE(3)-CV . . . . . . . . . . . . . . . . . . . . . . . . . 18613.1.2 System Model LTI . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
13.2 Experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18813.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
Chapter 14 Conclusion and Future Research . . . . . . . . . . . . . . . . . . 193
14.1 Future Research . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19514.1.1 Higher Order System Model . . . . . . . . . . . . . . . . . . . . . . . 195
vi

14.1.2 Measurement Management . . . . . . . . . . . . . . . . . . . . . . . . 196
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Appendix A Proofs For The LG-IPDAF . . . . . . . . . . . . . . . . . . . . . . 208
A.1 Proof of Lemma 6.2.2: Prediction Step . . . . . . . . . . . . . . . . . . . . . 208A.2 Proof of Lemma 6.4.1: Association Events . . . . . . . . . . . . . . . . . . . 210A.3 Proof of Lemma 6.4.2: Split Track Update . . . . . . . . . . . . . . . . . . . 213A.4 Proof of Lemma 6.4.3: Track Likelihood . . . . . . . . . . . . . . . . . . . . 217
Appendix B Proofs For The MS-LG-IPDAF . . . . . . . . . . . . . . . . . . . 220
B.1 Proof of Lemma 7.3.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220B.2 Proof of Lemma 7.3.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223B.3 Proof of Lemma 7.3.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Appendix C Common Lie Groups . . . . . . . . . . . . . . . . . . . . . . . . . . 227
C.1 Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227C.1.1 Adjoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228C.1.2 Exponential Map and Jacobians . . . . . . . . . . . . . . . . . . . . . 228
C.2 SO(2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228C.2.1 Adjoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229C.2.2 Exponential Map and Jacobians . . . . . . . . . . . . . . . . . . . . . 230
C.3 SO(3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230C.3.1 Adjoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231C.3.2 Exponential Map and Jacobians . . . . . . . . . . . . . . . . . . . . . 231
C.4 SE(2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232C.4.1 Adjoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233C.4.2 Exponential Map and Jacobians . . . . . . . . . . . . . . . . . . . . . 233
C.5 SE(3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234C.5.1 Adjoint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235C.5.2 Exponential Map and Jacobians . . . . . . . . . . . . . . . . . . . . . 236
Appendix D Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
vii

LIST OF TABLES
6.1 Statistical measures from the experiment . . . . . . . . . . . . . . . . . . . . . . 93
13.1 The performance measures of the experiment . . . . . . . . . . . . . . . . . . . 19013.2 Linear Least Squares Regression Results . . . . . . . . . . . . . . . . . . . . . . 191
viii

LIST OF FIGURES
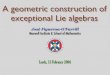
1.1 A depiction showing how a pendulum can be geometrically represented by theunit circle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 A depiction of tracking a car moving in a fairly straight line using the LTI-CVmodel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 A depiction of tracking a car transitioning into a turn using the LTI-CV model. 71.4 A depiction of why the state estimate of the target drifts from the true state when
using the LTI-CV model to track a target that is turning. . . . . . . . . . . . . 71.5 A depiction of how the size of the error covariance (green ellipse) relative to the
measurement noise covariance (red ellipse) affects the update to the state estimatedepicted by the arrow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.6 A depiction of the negative affect of increasing the process noise covariance. Thelarger the process noise is, the more challenging it is to associate the propermeasurement to the target. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7 A depiction of the CTRV model configuration where the yellow arrow denotesthe orientation of the car with respect to the x and y axes. . . . . . . . . . . . . 11
1.8 A depiction showing the relation between the unit circle S1 and the local repre-sentation φ (U). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.9 A depiction of a Gaussian distribution of φ (U) and corresponding Gaussian dis-tribution on S1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.10 A depiction of showing how the CTRV model does not preserve the shape andsize of the the error state’s probability density function. . . . . . . . . . . . . . . 16
2.1 The architecture of the G-MTT algorithm. . . . . . . . . . . . . . . . . . . . . . 29
3.1 A depiction of two compatible charts (φ1, U1) and (φ2, U2) where T is a topologicalmanifold, U1 and U2 are not disjoint sets, and Rn denotes Euclidean space. . . . 39
3.2 A depiction the smooth manifold M and tangent spaces at the points m1, m2,and m3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3 A depiction of the two curves γ1 : [0, 1] → M and γ2 : [0, 1] → M that begin atthe point m1 ∈ M and end at the point m2 ∈ M , and their respective tangentvectors at different points along the curve. . . . . . . . . . . . . . . . . . . . . . 42
3.4 A depiction of the relationship between a Lie group G, its Lie algebra g, and itscorresponding Cartesian algebraic space RG. . . . . . . . . . . . . . . . . . . . . 46
3.5 A depiction of a geodesic from g1 ∈ G to g2 ∈ G in the direction of v ∈ RG usingthe exponential map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.6 A depiction of the Gaussian distribution. . . . . . . . . . . . . . . . . . . . . . . 54
5.1 A depiction of the trajectory of three targets being observed in two dimensionalspace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2 An illustration of possible clusters pertaining to the scenario depicted in Fig. 5.1. 68
6.1 A depiction of the challenge of identifying which track represents the target. . . 716.2 A depiction of a single iteration of the LG-IPDAF . . . . . . . . . . . . . . . . . 756.3 A depiction of geodesic track fusion . . . . . . . . . . . . . . . . . . . . . . . . . 86
ix

6.4 Plots of the zoomed in circular trajectories for the LTI-CV and SE(2)-CV models. 926.5 Plots of the meandering trajectories for the LTI-CV and SE(2)-CV models. . . 926.6 Plots of linear trajectories for the LTI-CV and SE(2)-CV models. . . . . . . . . 93
7.1 A depiction of centralized fusion. . . . . . . . . . . . . . . . . . . . . . . . . . . 967.2 A depiction of the parallel and sequential fusion. . . . . . . . . . . . . . . . . . . 967.3 Illustration of the experiment with the MS-LG-IPDAF . . . . . . . . . . . . . . 1157.4 A comparison between the parallel and sequential fusion. . . . . . . . . . . . . . 1167.5 The average Euclidean error and the probability of detection as a function of the
number of false measurements per sensor scan from each sensor. . . . . . . . . . 1177.6 The average Euclidean error and the probability of detection as a function of the
relative angle variance in the measurement. . . . . . . . . . . . . . . . . . . . . 118
8.1 An overview of the track initialization process. . . . . . . . . . . . . . . . . . . . 1208.2 A depiction of a cluster. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1238.3 An overview of the RANSAC algorithm. . . . . . . . . . . . . . . . . . . . . . . 1248.4 A depiction of the inliers to the current state hypothesis. . . . . . . . . . . . . . 127
9.1 A depiction of two coalescing tracks that represent the same target. . . . . . . . 1299.2 A depiction of the track fusion process. . . . . . . . . . . . . . . . . . . . . . . . 133
10.1 A depiction of measurement latency. . . . . . . . . . . . . . . . . . . . . . . . . 138
11.1 A depiction of the end-to-end MTT tracking scenario. . . . . . . . . . . . . . . . 14411.2 Target tracking and following architecture. . . . . . . . . . . . . . . . . . . . . . 14611.3 A depiction of tracking a car using a monocular camera fixed to a UAV. . . . . 14711.4 A depiction showing how the food features to track and the KLT feature tracker
work to find matching points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14911.5 The geometry for the derivation of the homography matrix between two camera
poses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15011.6 A depiction of applying the homography to the scenario in Fig. 11.4c. . . . . . . 15111.7 Epipolar geometry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15211.8 Motion detection using the homography matrix. Matching features are shown in
red and blue. The set Mink is shown in blue, and the set Mout
k is shown in red. . 15411.9 Motion detection using the essential matrix. Matching pairs in Mout
k are shownin blue and red, where the red features are in Mmoving
k . . . . . . . . . . . . . . . 15511.10A depiction of the first few steps of RANSAC . . . . . . . . . . . . . . . . . . . 15911.11A depiction of generating multiple state hypotheses and their corresponding tra-
jectory hypotheses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.12A notional depiction of the camera frame and the virtual camera frame. . . . . . 16211.13The X and Y errors are in the normalized virtual image plane in units of meters
and the yaw error is in units of radians. . . . . . . . . . . . . . . . . . . . . . . . 165
12.1 A depiction of three targets being tracked by a UAV via a monocular camera. . 16712.2 An illustration of the relationship between the image plane and the virutal image
plane. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
x

12.3 The image shows the number of valid tracks and the number of missed targets ateach time step of the simulation. The x-axis is time in seconds. . . . . . . . . . 183
13.1 A visualization of the experiment tracking targets on SE (3). . . . . . . . . . . . 190
A.1 A depiction of the state estimate update conditioned on θk,j by using µ−k|k,j to
form a geodesic from xk|k− to xk|k,j. . . . . . . . . . . . . . . . . . . . . . . . . . 217
xi

NOMENCLATURE
General ti An instance in time in secondsti:j Time interval from time ti to time tjTW Time window intervalIn×n The n× n identity matrix0m×n The m× n zero matrix1m×n The m× n ones matrixEnd (y) An endomorphism on the space y
Lie groupG A generic Lie groupg A generic Lie algebra corresponding to GR A generic algebraic Cartesian space corresponding to GGy The Lie group of object ygy The Lie algebra of object yRy The algebraic Cartesian space of object y
ExpGy
I : Ry → Gy The exponential map at identity of the Lie group Gy
LogGy
I : Gy → Ry The logarithm map at identity of the Lie group Gy
JGyr : Ry → End (Ry) The right Jacobian corresponding to Gy
JGy
l : Ry → End (Ry) The left Jacobian corresponding to Gy
AdGyg : Ry → Ry The matrix adjoint of g ∈ Gy on Ry
adGyv : Ry → Ry The matrix adjoint of v ∈ Ry on Ry
SensorS =
1, 2, . . . , NS
The indexing set of sensors
Si ⊆ S The indexing set that produced measurements at time tisi ∈ S The ith sensorP siD The probability of detection for sensor siλsi The spacial density of false measurements for sensor siP siG The gate probability for sensor si
Vsii The volume of the validation region at time ti for sensor si
System Model
xi = (gi, vi) ∈ Gx ≜ G×R The target’s state at time tiqi:j =
(qgi:j, q
vi:j
)∈ Rx The process noise during the time interval ti:j
Q (ti:j) Process noise covariance during the time interval ti:jf : Gx ×Rx × R → Gx State transition functionFi:j : Rx → Rx Derivative of f w.r.t. the state over the time interval ti:jGi:j : Rx → Rx Derivative of f w.r.t. the process noise during ti:jzsii ∈ Gsi A measurement from sensor si obtained at time tirsii ∈ Rsi Measurement noise from sensor si at time tiRsi Measurement noise covariance for sensor sihsi : Gx ×Rsi → Gsi Observation function for sensor siHsii : Rx → Rsi Derivative of hsi w.r.t. the state at time ti
xii

V sii : Rsi → Rsi Derivative of hsi w.r.t. the measurement noise at time ti
Measurementsmsii ∈ R Number of track associated measurements from si at time ti
Msii = 1, 2, . . . ,msi
i Indexing set of track associated measurements from sensor siat time ti
zsii,j The jth track associated measurement from si at time ti
Zsii = zi,jm
sii
j=1 The set of track associated measurements from si at time ti
Zsi0:i =
Zsij
i
j=0The set of track associated measurements from sensor si
and from the initial time up to time ti
Metricsdsi,sjCD : Gsi ×Gsj → R Cluster distance metric between measurements from sensors
si and sjdCT : R× R → R Cluster time metricdCV : Gsi ×Gsj × R2 → R Cluster velocity metricdsiV : Gsi ×Gx × Rn×n → R The validation region metric w
dTA : Gx2 × (Rn×n)
2 → R Track association metricdsiRI : Gsi ×Gx RANSAC inlier metric for sensor si
ThresholdsτCD The cluster distance metric thresholdτCT The cluster time metric thresholdτCV The cluster velocity metric thresholdτCM The number of measurements a cluster needs to be
used with RANSACτ siV The validation region metric threshold for siτTA The track association metric thresholdτTR Track rejection thresholdτTC Track confirmation thresholdτRI RANSAC inlier thresholdτRMI RANSAC maximum iterationsτRSS RANSAC score stopping criteriaτRmS RANSAC minimum score criteriaτRSC RANSAC subset cardinality
EstimationN (χ,Σ) Gaussian distribution with mean χ and covariance Σx ∈ Gx Estimated stateP ∈ Rn×n Error covariance of the estimated statex ∼ N (µ, P ) ∈ Rx Error statep (ϵ) The track likelihood
xiii

Subscripts[ ]i The value of an object at time ti[ ]i|j The value of an object at time ti conditioned on
measurements up to time tj[ ]i,j The value of the jth object at time ti[ ]i|j,k The value of the kth object at time ti conditioned on
measurements up to time tj
xiv

CHAPTER 1. INTRODUCTION
Consider a multirotor flying overhead with the objective of identifying, locating, and
tracking objects that are moving below with a camera. We refer to these objects as targets,
which can be people, vehicles, wildlife, etc. The task of tracking the targets is called multiple
target tracking (MTT). While we will mainly focus on using a fixed camera mounted to a
multirotor as our motivating example, there is a wide variety of other MTT applications
such as wildlife monitoring [1], [2], battlefield surveillance, search and rescue operations [3]–
[5], missile defense, traffic and airspace monitoring [6], [7], and many more. These different
applications might require different frameworks: hardware, sensors, etc; however, the core
components of MTT are the same.
To facilitate our discussion of MTT algorithms, we break the algorithm down into
four main components. The first component is composed of the mathematical representation
of the target’s state (e.g. position, orientation, velocity, etc) and dynamics (i.e. motion),
which we refer to as the target model1, and the mathematical representation of the sensor(s)
that observe the target(s), which we refer to as the sensor model . Together, these two models
form the first component called the system model . MTT algorithms store information about
a target such as the state estimate and error covariance in a representation of the target
called a track .
We refer to the second component as data management. Data management consists of
three processes: data association, track propagation, and track updating. Data association
is the process of associating measurements to tracks or a data structure if the measurement
does not belong to a track. Track propagation is the process of propagating the track forward
in time to reflect the progression of time, and track updating is the process of incorporating
1Many of the italicised terms are definitions that can be found in Appendix D
1

track associated measurements to refine the track’s state estimate, error covariance and other
target related information.
The third component of MTT is the process of using non-track associated measure-
ments to create new tracks. This process is called track initialization. The last and forth
component is track management. This component is responsible for merging, confirming,
and rejecting tracks. Merging tracks is the process of combining the information from two or
more tracks deemed to represent the same target into a single track. A confirmed track is a
track with a high probability of representing an actual target, and a rejected track is a track
with a sufficiently low probability of representing a target that it is removed (i.e. deleted).
A target model is used to express the target’s state, motion, and the corresponding
model uncertainty due to inaccuracies in the model. Two challenges in modeling a target are
accounting for the forces acting on the target and capturing the wide variety of the target’s
motions such as straight lines, curvy paths, rotations, or any combination of the three. For
example, consider tracking a car restricted to a plane using a camera. The car can move in a
straight line down the road or a curve as it makes a turn. As the car undergoes these different
motions, forces acting on it cause it to accelerate and decelerate, and these forces cannot be
directly measured by the camera. Since the forces are unknown, they are modeled as input
noise or part of the process noise. Because of the unknown forces acting on the target, the
target model is often designed to be a constant velocity, acceleration, or higher-order model
that is driven by a white, Gaussian process representing the unknown forces.
Many of the common target models used only capture a single motion. For example,
the linear, time-invariant, constant velocity (LTI-CV) model [8] describes linear motion, and
the constant turn rate and velocity model (CTRV) describes turning motions that have a
constant turn rate and velocity [9]. The LTI-CV model works well in tracking a car moving
in a straight line down the road, but it struggles when the car turns. Likewise, the CTRV
model works well in tracking a turning car, but it struggles when a car moves in a straight
line down the road. A more accurate approach would be to use a single target model that
describes all of the target’s motions.
To define a target model that describes all of the target’s motions, we must con-
sider the space that the target naturally resides in and represent it mathematically. The
2

representation of the target’s natural space must be able to represent every possible state
and motion of the target and must maintain all geometric relations between the different
states such as angles and distances. For example, the natural space of a planar pendulum
can be represented geometrically using a circle with a fixed radius where a point on the
circle represents the position of the pendulum as shown in Fig.1.1. The circle preserves
the geometry of the planar pendulum since we can measure angles and distances between
points on a circle. Another example that is harder to visualize is a car, but it too can be
described using a geometric representation which we will discuss later in more detail. We
refer to target models that preserve these geometric properties as geometric target models
and all other target models as non-geometric target models. For a more detailed definition of
geometric target models, we refer the reader to [10], which applies geometric target models
to geometric mechanics.
Figure 1.1: A depiction showing how a pendulum can be geometrically represented by the unitcircle.
We further motivate the use of using geometric target models in Section 1.1. In
Section 1.2 we review several tracking algorithms that can be adapted to geometric target
models, and in Section 1.3 we present the objective of the dissertation and summary of
contributions. There are a lot of technical terms in target tracking literature. When we
introduce one of these terms, we will write the term in bold font. Many of these terms can
be found in the glossary at the end of the document for future reference.
3

1.1 Target Model
There has been an increasing amount of research in modeling targets using a geometric
approach for a significant improvement in both control and estimation since geometric target
models are a more accurate representation than non-geometric target models [11]–[16].
To motivate the use of geometric target models, we will discuss some of the short-
comings and failures of non-geometric target models that are overcome by geometric target
models. We restrict our discussion to discrete, time-invariant target models whose uncer-
tainty in the target’s state estimate and motion is represented using a Gaussian distribution.
The uncertainty in motion is modeled using a white, zero mean, Gaussian distribution called
the process noise, and the uncertainty in the target’s state estimate is modeled using a
white, zero-mean, Gaussian distribution whose covariance is referred to as the error covari-
ance. Even though Gaussian distributions do not always accurately depict the uncertainty,
it is often a good enough assumption provided that the signal-to-noise (SNR) is high enough.
This is the assumption used with the Kalman filter or any of its variations. For an in depth
survey on different target models used for MTT, we refer the reader to the series Survey of
Maneuvering Target Tracking parts I-VI [8], [17]–[21].
We proceed to first discuss several issues with non-geometric, linear models that
cause these target models to sometimes fail, and then we will discuss several issues with
non-geometric, non-linear models that cause these target models to sometimes fail.
1.1.1 Why Non-Geometric, Linear Models Sometimes Fail
To demonstrate several issues with non-geometric, linear, time-invariant models, we
will apply the linear, time-invariant, constant-velocity (LTI-CV) model to our motivating
example of tracking a car. The LTI-CV model assumes that the target’s state can be rep-
resented as position and translational velocity and that the target’s motion is linear. The
LTI-CV model has no notion of orientation or angular velocity. Due to this limitation, it
cannot express every state and motion of the car; hence, it is a non-geometric model in this
case.
4

The LTI-CV model works well when the car moves in a fairly straight line, but
struggles when the car turns. To demonstrate this, we will illustrate tracking a single car in
two scenarios. In the first scenario, the car moves in a straight line. In the second scenario,
the car transitions from moving in a straight line to turning. We will break each scenario
into two steps: the prediction step and the update step. In the prediction step, the target
model is used to propagate the target’s state estimate and error covariance forward in time.
In this step, the volume of the error covariance increases to reflect the inaccuracies in the
target model (e.g. the forces are unknown), and the propagated state estimate drifts farther
away from the target’s true state due to inaccuracies in the target model. In the update
step, sensor measurements, which contain information about the target’s true state, are used
to improve the state estimate and decrease the error covariance.
The first scenario is depicted in Fig 1.2. In this figure, the target is represented by
the car, the measurement is represented by a red circle, the target’s state estimate and error
covariance are represented by the green ellipse with the center of the ellipse denoting the
state estimate and the area of the ellipse representing one standard deviation of the error
covariance. In the top left image, the car is moving down the road in a straight line, and
the state estimate is aligned with the target. In the top right image, the car moves forward,
and the state estimate and error covariance are propagated forward in time according to the
target model. Notice that since the target model captures linear motion well, the center of
the green ellipse drifts only slightly from the target’s true position. The volume of the error
covariance increases to reflect the uncertainty in the target’s motion. In the bottom left
image, a point measurement is received from the camera. In the bottom right image, the
measurement is used to improve the state estimate. This is shown by the ellipse shrinking
and being more centered around the target.
The second scenario is depicted in Fig 1.3. In the top left image the target and state
estimate are aligned. In the top right image, the car begins to turn and the state estimate and
error covariance are propagated forward in time. Notice that the state estimate continues
to move straight according to the LTI-CV model and is starting to drift significantly from
the target. In the bottom left image, the camera observes the car and produces a point
measurement. In the bottom right image, the point measurement is used to update the
5

1) Initial conditions 2) Prediction step
3) Receive measurement 4) Update step
Target State estimate and errorcovariance
Measurement
Figure 1.2: A depiction of tracking a car moving in a fairly straight line using the LTI-CV model.
state estimate. Notice how the center of the state estimate shifts closer to the car but is not
centered nor oriented with the car. In addition, notice that the error covariance shrinks in
volume just as much as it did in the first scenario; implying that the tracking algorithm is just
as certain about the state estimate as in the first scenario even though it is worse. Essentially,
since the LTI-CV model cannot properly express the car’s turning motion, the state estimate
may drift farther and farther away from the target to the point that the tracking algorithm
looses the target. This drifting over several time steps is depicted in Fig. 1.4 where the black
curve represents the turning trajectory of the target, and the disjoint, green, straight arrows
show the trajectory of the state estimate over multiple propagation and update steps. The
green arrows are straight to depict the linear model prediction, and disjoint because the state
estimate jumps when it is updated with new measurements.
There are some common techniques used to improve tracking performance when using
a linear time invariant (LTI) target model to track non-linear, agile motions such as a car
turning. It was reported in [22] and [23] that higher-order, target models such as LTI constant
6

Target State estimate and errorcovariance
Measurement
3) Receive measurement 4) Update step
2) Prediction step1) Initial conditions
Figure 1.3: A depiction of tracking a car transitioning into a turn using the LTI-CV model.
Target's trajectory
Track's trajectory
Figure 1.4: A depiction of why the state estimate of the target drifts from the true state whenusing the LTI-CV model to track a target that is turning.
acceleration and jerk models are able to track agile targets better than the LTI constant
velocity model. One of the reasons for the improved behavior is due to the increased volume
of the error covariance pertaining to the target’s position when using a constant acceleration
and jerk model as opposed to a constant velocity model. The volume of the error covariance
pertaining to the target’s position is greater since the uncertainty in velocity, acceleration,
and jerk are all integrated into the uncertainty in the target’s position. Another reason
is that constant acceleration and jerk models can describe some turning motions, but not
7

constant-turn-rate motions. To clarify, when a target has a constant turn-rate motion and is
being represented in Cartesian coordinates, the magnitude of the translational acceleration
is constant, but the direction of the acceleration in the inertial frame, in which tracking is
done, changes as the target turns; hence, the target’s acceleration from the perspective of
the tracking algorithm is not constant. This is why a constant LTI acceleration model in
Cartesian coordinates cannot model constant-turn-rate motions. An LTI-CV model in polar
coordinates can be used to model constant turn-rate motions; however, it cannot model the
target’s straight motions. In other words, a single LTI-CV model cannot be used to model
both turning and straight motions.
Another common technique used to improve tracking performance when using an LTI-
CV model is to increase the process noise covariance in the target model. To understand this
technique we need to understand the significance of the size of the process noise covariance
relative to the size of the measurement noise covariance. The size of the process noise
covariance directly affects the size of the error covariance. The larger the process noise
covariance is, the larger the error covariance will be after the prediction step and during the
update step. In the update step, the MTT algorithm takes into account the size of the error
covariance relative to the size of the measurement noise covariance in order to determine
how much the associated measurement should influence the state estimate.
A large error covariance relative to the measurement noise covariance tells the MTT
to trust the measurement more than the target model. This will cause the state estimate to
be heavily influenced by the measurement and move more towards the measurement. This
scenario is depicted in the left image of Fig. 1.5, where the error covariance is depicted as a
green ellipse, the measurement noise covariance is depicted as a red ellipse, and the change
in the state estimate is depicted using an arrow. Note that the state estimate will move
greatly towards the measurement, but maybe not all the way to the measurement’s center.
On the other hand, a small error covariance relative to the measurement noise covari-
ance tells the MTT to trust the target model more than the measurement. This will cause
the state estimate to be slightly influenced by the measurement and move slightly towards
the measurement. This scenario is depicted in the right image of Fig. 1.5. Note that the
8

state estimate will move only slightly towards the measurement since the target model is
trusted more than the measurement.
Process noise Measurement noise State update
Figure 1.5: A depiction of how the size of the error covariance (green ellipse) relative to themeasurement noise covariance (red ellipse) affects the update to the state estimate depicted by thearrow.
The technique of increasing the process noise covariance can help, but it has the
disadvantage of the error covariance being larger. This can be an issue when associating
measurements to tracks when tracking multiple targets and when the sensor produces a lot
of measurements that are not target-originated called false measurements or clutter. To
illustrate the issue, we return to the second scenario depicted in Fig. 1.3. Suppose that
there is another car following the first, that both cars are detected by the camera, and that
the camera returns a false measurement as shown in Fig. 1.6. Notice that the green ellipse
corresponding to the state estimate of the turning car is larger since we assume that the
process noise is larger to compensate for the car’s turning motion. Also notice that all three
measurements are within the green ellipse corresponding to the uncertainty of the first car’s
state estimate. In this case, discerning which measurement originated from the turning car
is difficult if not impossible, and associating the wrong measurement can cause the tracking
algorithm to lose the turning car.
We do not wish to discredit the value of LTI models. They have many advantages
including being simple to implement and being computationally efficient. In addition, there
are some cases in which LTI models are appropriate and sufficient. For example, in the
case that the target’s motion is constrained to be linear, using an LTI model is actually a
geometric approach and can be used to track targets with only linear motion well. Also,
in the case that the target’s motion is not constrained to be linear, there is a single or few
9

Figure 1.6: A depiction of the negative affect of increasing the process noise covariance. The largerthe process noise is, the more challenging it is to associate the proper measurement to the target.
targets, and the sensors do not produce a lot of false measurements, the LTI models work
fairly well and may be sufficient. If an LTI model is not sufficient, a non-linear model should
be considered.
1.1.2 Why Non-Geometric Non-Linear Models Sometimes Fail
To demonstrate some of the issues with non-geometric, non-linear models, we will
look at the constant turn rate and velocity (CTRV) model with our motivating example
scenario of tracking a car using a camera. Unlike the LTI-CV model, the CTRV model takes
into account both the position and orientation of the car and their derivatives to express
both rotational and nearly linear motions. The CTRV model is defined as
xk = xi +
viωi(sin (θi + ωti:k)− sin (θi))
viωi(cos (θi)− cos (θi + ωiti:k))
ωδ
0
0
+ qi:k, (1.1)
where xi = [px, py, θ, v, ω]⊤ denotes the state of the target at time ti, px and py are the
components of the position of the target, θ is the heading of the target measured from the
10

x-axis with counter clock-wise rotation being positive rotation , v is the velocity of the target
in the forward direction, ω is the angular velocity, ti:k is the time interval from time ti to time
tk, and qi:k ∼ N (0, Q (ti:k)) denotes the zero-mean, Gaussian process noise with covariance
Q (ti:k) modeled as a Weiner process [24]. A depiction of the CTRV model is shown in
Fig. 1.7.
Figure 1.7: A depiction of the CTRV model configuration where the yellow arrow denotes theorientation of the car with respect to the x and y axes.
From the definition of the CTRV model in equation (1.1), it is apparent that the
target model is not defined if the target’s angular velocity is zero; thus, the target model is
not geometric since it cannot represent every possible configuration of the target. However,
that is a byproduct of the discretization of the model, and is not an issue in the continuous
time version of the CTRV model. That being said, we use the discrete CTRV model to
demonstrate a more subtle issue with some non-geometric, non-linear models regarding the
representation of orientation.
Suppose for a moment that the car can only rotate. The orientation of the car can
then be represented geometrically using the unit circle, denoted S1, where each point on
the circle represents an orientation. The CTRV model in equation (1.1) represents the car’s
orientation using θ ∈ φ (U) = (−π, π) ⊊ R where U ⊊ S1 and φ (U) is a local representation
of S1. The relation between the set φ (U) and the unit circle is shown in Fig. 1.8 where θ1, θ2
and θ3 denote three different orientations, and φ−1 : φ (U) → U ⊊ S1 is a bijection between
11

the open subset φ (U) and the open set U . Since U is a proper subset of S1, the set φ (U)
cannot represent all of S1;thus it is only a local representation of S1.
Figure 1.8: A depiction showing the relation between the unit circle S1 and the local representationφ (U).
To be more precise, the unit circle S1 is a Riemannian manifold that represents the
car’s orientation provided that the car does not translate. A manifold is simply a space
that looks locally Euclidean everywhere (i.e. flat), and a Riemannian manifold is a manifold
with a differentiable inner product defined everywhere [25]. The inner product is a metric
used to measure lengths, distances, and angles. It is the inner product that ensures that
geometric properties are preserved on Riemannian manifolds. We provide more details about
a Riemannian manifold in Chapter 3.
As a local representation of the unit circle, the subset φ (U) maintains the geometric
properties of the unit circle provided that we look in a small enough region, but it does not
maintain the global geometric properties. To help illustrate how φ (U) is a local representa-
tion that preserves local geometric properties, we will look at the two orientations represented
by θ1 and θ3 in Fig. 1.8. According to the local representation φ (U), the shortest path from
θ1 to θ3 corresponds to the car rotating clockwise, and according to the global representation
S1, the shortest path from φ−1 (θ1) to φ−1 (θ3) corresponds to the car rotating clockwise. In
12

this case the local representation φ (U) is able to maintain the geometric relations between
the two orientations represented by θ1 and θ3.
To help illustrate how φ (U) fails to maintain the global geometric properties, we will
look at the two orientations represented by θ1 and θ2 in Fig. 1.8. According to the local
representation φ (U) the orientations represented by θ1 and θ2 are far apart, and the shortest
path from θ1 to θ2 corresponds to a clockwise rotation that passes through the origin. On
the other hand, according to the global representation S1, the two orientations represented
by φ−1 (θ1) and φ−1 (θ2) are close together and the shortest path from φ−1 (θ1) to φ
−1 (θ2)
corresponds to a counter clockwise rotation. Thus, the local representation φ (U) is able to
maintain local geometric properties but not global geometric properties.
The inability of the local representation φ (U) to maintain geometric properties can
be a significant issue when designing controllers and estimators. For example, suppose
that the car’s true orientation is θ = π, the estimated orientation is θ1 = 9π10
radians, and
the sensor measurement is θ2 = −9π10
radians, then the error in the local representation is
e = 9π10
− −9π10
= 18π10
. A naive estimator using the CTRV model would try to reduce the
error by moving the estimated orientation closer to the measurement clockwise through the
origin. If the error covariance is small relative to the measurement noise covariance, the
estimated orientation will only move slightly clockwise towards θ2 possibly resulting in the
new estimated orientation being θ3, which is a worse estimate.
Another issue with the local representation φ (U) is how uncertainty is represented.
Using Fig. 1.9, suppose that the car’s estimated orientation is θ1 and the error covariance is
portrayed by the Gaussian distribution centered at θ1. The obvious issue is that the Gaussian
distribution extends past the point π. The more subtle issue with the Gaussian distribution
defined on φ (U) is that it suggests that the probability of the target’s orientation being
close to θ = −π is several standard deviations away when in reality it is only about two.
Typically, this issue is compensated by extending the space φ (U) beyond π which requires
other methods such as angle wrapping to account for this extension. Angle wrapping is the
mapping of an angle θ to any of its equivalent multiples 2πk + θ where k ∈ R. Returning
to Fig. 1.9, the angle θ = −π is several standard deviations away from θ1, but one of its
multiples , π, is only two standard deviations away. There are many cases in which angle
13

wrapping is sufficient, but it turns a continuous system into a disjoint system, and many
properties are lost.
Figure 1.9: A depiction of a Gaussian distribution of φ (U) and corresponding Gaussian distributionon S1.
Some other common target models that use local representations include models used
to express the target’s orientation in three dimensional space such as Euler angles, axis-angle,
Rodriguez parameters, etc; for a survey of attitude representations, see [26]. All of these
have similar issues as the ones already described. For example, one of the common issues
with Euler angles is gimbal lock. Gimbal lock occurs when the target pitches at an angle of
π/2. At this angle, there is no difference between the yaw and the roll angles. This problem
is a result of the Euler angles being a local representation where the pitch of π/2 is outside
of the local representation.
A challenge with any nonlinear system is preserving the shape and volume of the
estimated state’s Gaussian probability density function. This is because Gaussian density
functions are preserved under affine transformations and not under nonlinear transforma-
tions. To preserve the Gaussian structure when a nonlinear target model is used to propagate
the uncertainty in the state estimate, the target model is made affine about the current state
estimate, and the affine model is used to propagate the uncertainty. This affinization is a
14

first-order approximation and results in information about the true uncertainty distribution
being lost.
To illustrate the challenge of preserving the error state’s probability density func-
tion, we ran three Monte Carlo simulations consisting of 500 iterations each. In each
simulation we used the CTRV model defined in equation (1.1) with an initial state of
x = [0, 0, π/2, 1, 1e−4]⊤, an initial error covariance of zero, and the following different process
noise covariances
Q1 = diag(5e−2, 5e−2, 0, 0, 0
),
Q2 = diag(5e−2, 5e−2, 5e−2, 0, 0
),
Q3 = diag(5e−3, 5e−3, 5e−2, 0, 0
),
for the three simulations.
In each iteration, the target model was propagated forward in time with a time step
of 0.1 seconds for a total of 6 seconds. We then created three plots for each simulation
consisting of the target’s final position at the end of each iteration (depicted as black dots),
a standard deviation of the position portion of the error covariance centered at the mean
position (depicted by a green ellipse), and the trajectory of the target without any process
noise (depicted by a blue dotted line). These plots are shown in Fig. 1.10 where the left
image was generated using Q1, the middle image was generated using Q2, and the right
image was generated using Q3. Notice that when the process noise covariance for θ is small,
the target model can be approximated as affine, and the shape and size of the uncertainty
in the state estimate is preserved. However, when the process noise covariance for θ is large,
the shape and size of the error state’s probability density function are not well preserved due
to propagating the uncertainty using an affinized target model.
The inability to preserve the size and shape of the error covariance can have a negative
impact in estimation depending on the tracking algorithm. This is because some target
tracking algorithms take into account the probability of a measurement given the current
state estimate in order to determine if a measurement should be associated to the track, or
how much a measurement should influence the state estimate during the update step. A given
15

Figure 1.10: A depiction of showing how the CTRV model does not preserve the shape and size ofthe the error state’s probability density function.
measurement might seem unlikely given the approximated error covariance when in reality
it is likely. This could result in the target-originated measurement not being associated to
the track or having little influence in the update step. Fortunately, the geometric approach
is better able to preserve the size and shape of Gaussian probability density functions as
discussed in [27].
There are other problems with non-geometric, non-linear target models that we will
not discuss, but the main idea that we wanted to convey is that many non-geometric, non-
linear target models are only local representations of an underlying Riemannian manifold.
These local representations fail to preserve the global geometric properties which results in
a degradation of tracking performance. These failures can be overcome by modeling the
target from a geometric perspective. That being said, we do not wish to discredit the value
of non-geometric, non-linear target models. They have been used for years because they are
often sufficient and appropriate for certain applications.
1.1.3 Interactive Multiple Models
Before concluding this section, we want to briefly discuss the interactive multiple
model algorithm (IMM) [28], and how it can improve tracking performance. The IMM
algorithm uses multiple target models that describe different modes. These modes can be
different motions such as linear or turning motions, or different levels of process noise.
16

The IMM assigns a probability (i.e. weight) to each target model indicating how
well the target model currently represents the target relative to other target models. As the
target moves, there is a probability that the target transitions from one mode to another.
These probabilities are called transition probabilities. When a target model is propagated
forward in time, its new state estimate and error covariance is a blend of the state estimates
and error covariance of all of the target models according to the target model’s assigned
weight and transitioning probabilities. Measurements are then used to update the target
model’s state estimate, error covariance and weight.
An example application of the IMM algorithm is using the LTI-CV and CTRV models
to track a car. A car exhibits straight and turning motions that can be expressed using the
LTI-CV model and the CTRV model. When the car is moving straight down a road the LTI-
CV model will better express the target’s motion and have a higher weight than the CTRV
model. Similarly, when the car turns the CTRV will better express the turning motion and
have a higher weight than the LTI-CV model. Simply stated, the IMM algorithm switches
between the different target models depending on the motion of the car, ultimately increasing
tracking performance.
The IMM algorithm is only one example of a multiple model algorithm. Another
common multiple model algorithm is the autonomous multiple models algorithm [29], [30].
These algorithms are commonly used when one target model is unable to fully express the
target’s motion. While these algorithms can improve tracking performance and are appropri-
ate and sufficient in some applications, they have several drawbacks. One drawback is that
multiple model algorithms require a bank of filters, one filter for each target model; thus, it
is more computationally demanding. Two other drawbacks, as stated in [20], are selecting
the target models to use to represent the target and the determination of the transition
probabilities. The transition probabilities are determined by the user and require tuning.
Poor transition probabilities might result in the multiple model algorithm not transitioning
from one target model to the other at the proper time resulting in losing the target.
Since geometric target models are able to express the all of the target’s motions, a
single geometric target model is sufficient to track the target making the multiple model
algorithm unnecessary.
17

1.1.4 Lie Groups
In this section we have discussed several shortcomings of non-geometric target models
that are overcome by using geometric target models. Geometric target models are defined
on Riemannian manifolds since Riemannian manifolds preserve geometric properties. The
Riemannian manifolds of particular interest to us are Lie groups [31]. These smooth Rieman-
nian manifolds have the additional structure of a group and are commonly used to model
rigid-body motion, which is typically what targets are assumed to be in target tracking.
An example of a Lie group is the set of complex numbers of unit length with the
group operator being complex multiplication. This set is defined as
S1 = x ∈ C | xx∗ = 1 ,
and is used to represent the unit circle to express orientation. Another representation of the
unit circle is the special orthogonal group of two dimensions defined as the set
SO (2) =R ∈ R2×2 | RR⊤ = I, det (R) = 1
with the group operation being matrix multiplication. This Lie group is not only used to
indicate orientation, but is the set of all rotations in two dimensional space. For more
examples of Lie groups see Appendix C.
Lie groups are a particular interest to us since they have already shown to improve
the accuracy and performance of tracking a single target [32]–[36]. Although literature
regarding tracking multiple targets on Lie groups is sparse, we found one MTT scheme
presented in [37], in which the authors use the joint integrated probabilistic data association
filter (JIPDAF) [38] to track multiple targets. While these authors have contributed much
to the field of target tracking on Lie groups, their works focus on very specific applications.
In this dissertation, we will present MTT on Lie groups generically and with sufficient detail
so that others can easily apply it to different applications and different tracking algorithms.
In the following section, we will discuss some of the more common tracking algorithms that
can be adapted to work with target models defined on Lie groups.
18

1.2 Tracking Algorithms
Selecting the proper tracking algorithm is just as important as selecting the proper
target model. There are many different tracking algorithms that can be adapted to work with
Lie groups. We will restrict our discussion of tracking algorithms that use Bayesian filters to
maximize the a posteriori probability (MAP) of the target’s states given the measurements.
These specific tracking algorithms have propagation and update steps that have traces to
the traditional Kalman filter [39] or its variants [40]. This commonality or similarity is what
allows our approach to target tracking on Lie groups to be generalized to other algorithms.
In this section we present some of the more common Baysian tracking algorithms that
can be adapted to Lie groups. For a good review of target tracking algorithms we refer the
reader to [41].
1.2.1 Nearest Neighbor Filter
The nearest neighbor filter (NNF) is one of the simplest and computationally efficient
target tracking algorithms [42]. It associates the measurement closest to a track and uses
it to update the track’s state estimate. Typically, the update and propagation steps are
done via a Kalman filter or one of its variants. In this method, it is possible for a single
measurement to be used to update multiple tracks especially if a target was not detected
at a certain time step. This method is not robust to outliers and target occlusions. This
method also requires prior knowledge of the number of targets and cannot merge, initialize,
confirm or reject tracks.
1.2.2 Global Nearest Neighbor Filter
The global nearest neighbor filter (GNNF) is similar to the NNF except that it assigns
a measurement at most to one track by assigning the measurements such that distance
between the measurements and the associated tracks are minimized [43], [44]. Like the
NNF, this filter is not very robust, requires prior knowledge of the number of targets, cannot
merge, initialize, confirm or reject tracks.
19

1.2.3 Probabilistic Data Association Filter
The probabilistic data association filter (PDAF) is a soft data association algorithm
designed to track a single target in the presence of clutter [45], [46]. This method assumes
that when a sensor produces measurements, at most one measurement is target originated
and that the rest are false measurements uniformly distributed in the sensor’s measurement
space. The number of false measurements at every time step is modeled by an exponential
probability density function. The PDAF uses a gating technique to improve performance by
requiring measurements to be within some distance of the track in order to be associated
to the track. The associated measurements are assigned a weight according to their relative
probability of being the target-originated measurement and used to update the track.
The PDAF also assumes that the track is already initialized, and that the track
properly represents the target and not clutter. The PDAF was augmented in [47] to be
able to initialize, confirm and reject tracks in order to relax the assumption that the track
represents the target and not clutter. This variation of the PDAF is called the integrated
probabilistic data association filter (IPDAF).
It is common to see the PDAF used to track multiple targets even though it was
originally designed to track a single target. This is done by storing a bank of PDAFs for
each track. All of the measurements that fall inside the validation region are used to update
the track whose validation region they fell into. One issue with this is when a measurement
falls inside the validation region of two or more tracks. The PDAF assigns the measurement
to each track without taking into account the possibility that the measurement belongs to
the other track. This drawback was the motivation for the joint probabilistic data association
filter (JPDAF).
1.2.4 Joint Probabilistic Data Association Filter
The JPDAF is an extension of the probabilistic data association filter (PDAF) to
multiple target tracking. It is a single-scan tracker that uses a soft data association tech-
nique to weigh new measurements inside a track’s validation region based upon the new
measurement’s joint data association probability [46]. The weighted measurements are used
20

to update the tracks. Even though it is a single-scan tracker, calculating the joint prob-
ability of all possible data associations per scan makes it more computationally complex
and demanding. In addition, this method requires an additional scheme to initialize, merge,
confirm, and reject tracks.
Like the PDAF, another shortcoming of the JPDAF is that it assumes that the target
a track represents exists. This shortcoming was addressed in [38] which introduced the joint
integrated probabilistic data association filter (JIPDAF). It is the JPDAF with the additional
piece of calculating the probability that a track represents a target. In [37] the JIPDAF was
modified and adapted for Lie groups.
1.2.5 Multiple Hypothesis Tracking
The multiple hypothesis tracking (MHT) algorithm is an optimal tracking algorithm
in the sense that it considers all possible measurement associations and all possible track
initializations. Each possibility is referred to as a hypothesis. The hypothesis with the
greatest probability is considered the correct one as discussed in [48]. The sheer amount of
possibilities results in it being very computationally expensive and not feasible in real time
unless appropriate simplifying techniques are used to limit the number of hypotheses. Some
of the techniques used to simplify the algorithm are pruning hypotheses with low probability,
merging similar hypotheses, using a sliding window to reduce the number of measurements
to consider, and others described in [49]. When these techniques are used, the algorithm is
suboptimal. Even with these simplifications, the algorithm can be difficult, computationally
expensive and complex to implement.
There are two versions of the MHT algorithm that attempt to mitigate the com-
putational complexity in different ways: measurement-oriented (MO-MHT) [50] and track-
oriented (TO-MHT) [51]. In the measurement oriented approach, a set of hypotheses are
stored that exhaustively enumerate all possible measurement associations. A measurement
is either associated with an existing track, a new track or classified as a false measurement
ensuring that no measurements are shared between any track. The hypothesis that has the
most probable set of tracks is deemed correct. As stated previously, this is very compu-
21

tationally expensive and not feasible unless appropriate simplifying techniques are used to
limit the number of generated hypotheses.
The TO-MHT uses a track tree structure to store all possible track hypotheses with
each leaf denoting a possible state estimate of the target. As new measurements are received,
they are gated and incorporated into the track tree thus extending the tree. Tracks are
defined as compatible if they do not share common observations. A global hypothesis is the
subset of all possible tracks that are compatible. The global hypothesis that maximizes the
a posteriori is considered the correct set of tracks. In addition, leaves with low probability
are pruned at each time step. This method is capable of real time tracking for moderately
simple tracking scenarios. It is also a complex and difficult algorithm to implement.
1.2.6 Probabilistic Multi-Hypothesis Tracker
The probabilistic multi-hypothesis tracker (PMHT) is a batch algorithm that uses
all measurements from a time window to update each track [52]. Unlike the traditional
MHT, the PMHT assigns each measurement to every track with an associated probability
that the measurement originated from a certain track. This probability is estimated using
an empirical Bayesian algorithm. Because of this approach, this algorithm does not require
an enumeration of all possible measurement to track assignments nor pruning because all
measurements are associated to every track. As a result, the computational expense of this
algorithm is much less than the traditional MHT.
In its original form, PMHT was not designed to initialize, merge, confirm and reject.
These issues were addressed and resolved in [53]. However, the algorithm requires using
the expectation-maximization (EM) algorithm [54] to solve the MAP problem which is an
iterative optimizaiton problem that can be slow to converge. For a well written and general
overview of the PMHT algorithm we refer the reader to [55].
1.2.7 Probabilistic Hypothesis Density Algorithm
The probabilistic hypothesis density (PHD) algorithm was first presented in [56]. It
is a multiple target tracking algorithm that recursively estimates the number of targets in a
22

region and their states. It leverages the concept of random finite sets to formulate a multi-
hypothesis Bayes filter without requiring hard data associations. Therefore, it does not
require an enumeration of all possible measurement to track associations. This drastically
reduces the computational complexity of the algorithm.
The PHD algorithm is unique since it does not track targets individually; rather, it
poses the problem as a mixture of densities; typically Poisson or Gaussian that indicates the
number of targets in a certain region [57]. The PHD algorithm can initialize tracks from
measurements or other tracks and remove tracks by adding or removing a distribution either
to or from the mixture.
By definition of the PHD algorithm, the density distribution can be integrated over
a region to calculate the expected number of targets in that region. This is useful for
monitoring traffic congestion on roads or in the air. Since the density distribution is a mixture
of densities, the states of the targets are read from the peaks of the density distribution, i.e.
every node of the distribution represents the state of a target.
This algorithm has shown good results. In [58], it was demonstrated that the PHD
filter has fewer false or dropped tracks than the traditional MHT algorithm. It was also
stated that the Gaussian-mixture of the cardinalized PHD filter can achieve similar tracking
performance as the joint probabilistic data association filter (JPDAF) but at a much smaller
computational expense.
One of the disadvantages of the PHD filter is a lack of track identification, and poor
performance when the signal to noise ratio (SNR) is low. What is meant by lack of track
identification is that the algorithm only specifies where targets are and how many in each
region, but it cannot correlate a track at one time step with a track at another time step.
While this may not be important in some applications, it makes following a specific target
very difficult. As mentioned in [57], [59], there are variations of the PHD that do track
identification at a high computational expense.
1.2.8 KALMANSAC
KALMANSAC is a robust target tracking algorithm that uses RANSAC [60] to filter
out false measurements [61]. At each time step, given a set a measurements containing
23

inliers and outliers, KALMANSAC uses RANSAC to find the data association resulting
in the MAP solution. It does this by repeating the following procedure. KALMANSAC
randomly samples the set of new measurements and estimates a new state for every track
based on the sampled measurements. It then seeks to find all measurements that support the
new state estimates and refines the estimate. This process is repeated up to a predetermined
amount of time. The sample of measurements that result in the best MAP solution is used
in the final state estimate. This target tracking method is robust to outliers; however, it is
only designed to handle one target. In addition, the method is sensitive to the initial guess
of the state estimate, i.e. the track initialization. If the track is initialized far from the truth,
then KALMANSAC may never converge to the true state.
1.2.9 R-RANSAC
Recursive Random Sample Consensus (R-RANSAC) is a recent MTT algorithm that
has been developed in [22], [59], [62]–[73]. It has a modular paradigm that is capable of data
association and initializing, propagating, updating, merging, confirming and rejecting tracks.
Its modular paradigm allows it to use different filtering algorithms such as the nearest neigh-
bor filter, global nearest neighbor filter, probabilistic data association filter, and others. The
novelty of R-RANASAC is in the way it performs track initialization. Many target tracking
algorithms initialize tracks from one or two measurements which results in many false tracks.
R-RANSAC has a more robust track initialization scheme. Using non-track associated mea-
surements, R-RANSAC uses RANSAC [60] to fit a subset of measurements to the target
model in order to create a possible current state estimate of the target. R-RANSAC then
searches for additional measurements that support the possible state estimate. This process
is repeated for a specified number of times creating many different possible current state
estimates, and the state estimate with the largest number of supporting measurements is
used to initialize a track. This track initialization method has proven robust in the presence
of dense clutter, and drastically reduces the number of false tracks created.
R-RANSAC offers a good balance between tracking performance and complexity. It
also incorporates all of the four components of multiple target tracking: system model, data
management, track initialization, and track management.
24

1.3 Summary of Contributions
The main contribution of this dissertation is the development of a novel MTT algo-
rithm that tracks targets whose target model can be defined on any unimodular, geodesically
complete Lie group. We name the algorithm geometric multiple target tracking (G-MTT).
G-MTT is influenced by several existing algorithms: the measurement management algo-
rithm used in density-based R-RANSAC [72]; the track initialization scheme used in R-
RANSAC [63]; data association and track propagation, updating, confirming and rejecting
algorithms used in the integrated probabilistic data association filter (IPDAF) [38]; the par-
allel centralized measurement fusion algorithm from [74] and the track-to-track association
and fusion from [74].
We aim to describe the development of G-MTT in detail, so that this dissertation
can serve as a guide to adapt other MTT algorithms discussed in Section 1.2 to work with
target models defined on Lie groups. As part of the development and testing of G-MTT the
following are the major contributions of this dissertation:
• Design a generic, discrete, constant-velocity target model that evolves on Lie groups
and provide specific examples.
• Develop a measurement management strategy using clusters that are defined on Lie
groups. This method is influenced by density-based R-RANSAC [72].
• Extend the IPDAF presented in [38] to Lie groups. We call this algorithm Lie group
IPDAF (LG-IPDAF).
• Develop a parallel centralized measurement fusion algorithm that works with the LG-
IPDAF algorithm.
• Derive a robust track initialization scheme for targets defined on Lie groups. This
method is based on the track initialization scheme in [63].
• Derive a track-to-track association and fusion algorithm for tracks defined on Lie
groups. This method in based on the track-to-track association and fusion algorithms
presented in [74].
25

• Present a method to deal with measurement latency where the system model is defined
using Lie groups.
• Develop an end-to-end target tracking framework using a monocular camera fixed on
a multirotor.
• Provide several examples of target tracking using G-MTT.
1.4 Dissertation Outline
The outline of the remainder of this dissertation is summarized as follows. Chapter 2
presents an overview of geometric multiple target tracking. Chapter 3 reviews fundamen-
tal theory pertaining to Lie groups that is required to understand the the derivation of
G-MTT. Chapter 4 derives the generic, discrete, time-invariant, constant-velocity, system
model defined on Lie groups. Chapter 5 describes how measurements not associated to
tracks are managed to improve the track initialization process. Chapter 6 derives the Lie
group integrated probabilistic data association filter that is used by G-MTT to perform data
association and to propagate and update tracks. Chapter 7 derives the parallel centralized
measurement fusion that is used with the LG-IPDAF in the case of multiple sensors. Chap-
ter 8 presents the track initialization scheme on generic Lie groups. Chapter 9 presents
the track-to-track association and fusion algorithms used to merge tracks that represent
the same target. Chapter 10 shows how to deal with measurement latency using the LG-
IPDAF. Chapter 11 presents an end-to-end MTT framework using a camera mounted to a
small unmanned air systems (sUAS) to track ground targets. Chapter 12 shows how to use
the end-to-end MTT framework to track targets on a moving image plane where the target
model is defined on SE (2). Chapter 13 presents an example application of tracking multiple
sUAS on SE (3) using a fixed monocular camera. Chapter 14 presents our conclusions and
future research.
26

CHAPTER 2. OVERVIEW OF GEOMETRIC MTT
Geometric multiple target tracking is designed to track multiple dynamic targets. The
targets are modeled using a geometric, constant-velocity, white-noise-driven, system model
as defined in Chapter 4. The targets can be observed by one or more sensors. Each sensor
observes a subset of the measurement space called a sensor surveillance region. The union
of every sensor surveillance region is called the surveillance region. G-MTT tracks targets
without prior knowledge of the number of targets within the surveillance region at any given
time, implying that targets can move in and out of the surveillance region. This is because
G-MTT is capable of initializing, confirming, and rejecting tracks.
To track the targets, G-MTT creates mathematical representations of the targets
called tracks . Formally, a track is a tuple T = (x, P, CS, ϵ, L), where x is the state estimate
of a target, P is the corresponding error covariance, CS is the set of measurements associated
to the track called the consensus set , ϵ denotes the probability that the track represents a
target and is called the track likelihood , and L is the track label, a unique numerical label
used to identify tracks confirmed to represent a target.
G-MTT initializes tracks from the measurements. Since sensors produce both target-
originated measurements, called true measurements , and non-target-originated measure-
ments, called false measurements or clutter, tracks generated by G-MTT can be created
from true measurements and/or false measurements. Therefore, an initialized track can ei-
ther represent a target or clutter. To identify the tracks that represent a target, G-MTT
calculates the track likelihood . The track likelihood is discussed in detail in Chapter 6. A
track with a high track likelihood is confirmed to represent a track and is called a confirmed
track .
G-MTT performs target tracking in the tracking frame. The tracks’ state estimates
and error covariances are expressed in the tracking frame with respect to the tracking frame.
27

The sensors produce measurements in their respective sensor frames . This requires that
all of the measurements from the different sensors are either transformed into the tracking
frame before being given to G-MTT, or that a transformation that transforms a track’s
state estimate and error covariance from the tracking frame to the sensor frame of sensor si
( denoted T si ) is provided to G-MTT to perform data association and update the tracks.
We refer to the first option as sensor mode one and the second option as sensor mode two.
Sensor mode one is used when the measurements can be transformed into the tracking
frame. In the case of sensor mode one, if the tracking frame moves, then a transformation
(denoted T T ) must be provided that can transform the previous measurements and tracks
stored by G-MTT from the previous tracking frame to the current tracking frame. An
example of sensor mode one is tracking targets on the ground using a fixed camera mounted
to a moving multirotor, where tracking is performed on the image plane. As the camera
moves, the tracking frame moves, and so a transformation between the previous and current
tracking frame needs to be provided. This specific example is explored more in Chapter 12.
Sensor mode two is used when the track’s state estimate and error covariance can be
transformed into the tracking frame. Sensor mode two is typically used instead of sensor
mode one when either the measurements cannot be transformed into the tracking frame,
or when transforming the measurement covariance into the tracking frame via Jacobians
results in information being lost. An example of sensor mode two is tracking multirotors
using a network of radar sensors. Some radars measure the change in range in addition to
the target’s relative range and angle to the radar. The change in range may not be able to
be transformed into the tracking frame, and transforming the measurement covariance into
the tracking frame would require Jacobians and results in a first order approximation of the
measurement covariance (i.e. loss of information). Instead of transforming the measurements
from their respective sensor frames, tracks are transformed from the tracking frame to each
sensor frame when performing data association and track updating. This example is explored
more in Chapter 7.
The architecture of G-MTT is depicted in Fig. 2.1. The data flow is as follows. The
sensors observe the targets in their respective sensor surveillance regions. The measurements
are then either transformed to the tracking frame or a transformation from the tracking frame
28

to each sensor frame is provided. The measurements and transformations are then given to
G-MTT. Once G-MTT receives the input, it performs three phases: data management, track
initialization, and track management. We discuss each phase later in Sections 2.2, 2.3 and
2.4. After performing all three phases, G-MTT returns a list of confirmed tracks.
TrackingFrame
Text
1. Remove expired measurements from clusters 2. Propagate tracks 3. Transform tracks and measurements 4. Associate new measurements to tracks or clusters 5. Update tracks
6. Generate state hypotheses from clusters 7. Initialize new tracks using state hypotheses 8. Manage clusters
9. Merge similar tracks 10. Confirm and reject tracks 11. Assign ID to confirmed tracks 12. Prune tracks
Track Management
Track Initialization
Data Management
Measurements,
Confirmed Tracks
Geometric-MTT
SensorSurveillance
RegionSensorFrame
SensorSurveillance
RegionSensorFrame
Measurements,
Measurements,
Figure 2.1: The architecture of the G-MTT algorithm.
2.1 Sensor
To distinguish between different sensors we use the indexing set S =1, 2, . . . , NS
where NS denotes the number of sensors and si ∈ S denotes the ith sensor. When a sensor
produces a measurement it is called a sensor scan. G-MTT assumes that sensor si detects
a target with probability P siD ∈ [0, 1] where P si
D = 0 indicates that the target is not in sensor
surveillance region of sensor si. It is assumed that a sensor produces at most one target
originated measurement for every target per sensor scan, and all other measurements are
false, independent identically distributed (iid) with uniform spatial distribution, and that
29

the number of false measurements per sensor scan from sensor si is modeled by the Poisson
distribution
µF (ϕ) = exp (λsiVsi)(λsiVsi)ϕϕ!
, (2.1)
where λsi is the spatial density of false measurements for sensor si, Vsi is a portion of the
sensor si’s surveillance region to consider, and ϕ is the number of false measurements.
The sensors can produce measurements synchronously or asynchronously at non-fixed
time intervals. The measurements are not required to be given to G-MTT in chronological
order since G-MTT is able to deal with measurement latency as discussed in Chapter 10.
When a sensor scan occurs, the measurements are given to G-MTT with any necessary
transformations.
2.2 Data Management: Items 1-5 in Fig. 2.1
The first phase of G-MTT is data management. Data management begins once new
measurements and transformations are received. G-MTT stores measurements and tracks in
memory. To reduce memory storage requirements G-MTT removes measurements that were
received at a time outside of the sliding time window denoted TW . For example, if the time
window is Tw = 10 seconds, then all measurements with a time stamp older than 10 seconds
are removed. We call these measurements expired measurements.
Once expired measurements are removed, G-MTT propagates tracks to the current
time using the LG-IPDAF derived in Chapter 6. In the case of sensor mode one and provided
that the tracking frame has moved, the tracks and previous measurements are transformed
to the current tracking frame. This ensures that data association is done in the current
tracking frame.
After the tracks have been propagated to the current time and transformed to the
current tracking frame, G-MTT associates the new measurements to tracks or clusters. G-
MTT first tries to associate the new measurements to existing tracks using a validation
region. A validation region is a volume in measurement space centered on a track’s estimated
measurement and serves as a gate during data association as discussed in Chapter 6. The
remaining non-track-associated measurements are then tested to see if they belong to an
30

existing cluster. A cluster is a group of neighboring measurements and is thoroughly defined
in Chapter 5. To associate measurements from different measurement spaces to a cluster,
we require that measurements from different measurement spaces can be compared using
a metric. Measurement spaces that can be compared using a metric are called compatible
measurement spaces. As an example, one sensor might define a measurement using polar
coordinates and another sensor might define a measurement in two dimensional Cartesian
coordinates. Since there exists a map between these two spaces, we can define a metric
between them and the two measurement spaces are compatible. The measurements that do
not belong to a track or an existing cluster are used to create new clusters.
After data association, G-MTT performs the update step. During the update step
G-MTT uses a track’s associated measurements to update the track’s state estimate, error
covariance, and track likelihood according to the LG-IPDAF algorithm discussed in Chap-
ter 6. The new associated measurements are added to the track’s consensus set. The data
management phase is done after the update step.
2.3 Track Initialization: Items 6-8 in Fig. 2.1
G-MTT performs the track initialization phase after the data management phase.
During the track initialization phase G-MTT tries to initialize a new track from each cluster
that has at least τCM measurements with unique time stamps using the robust, regression
algorithm, random sample consensus (RANSAC) [60]. RANSAC seeks to find a state esti-
mate that fits the largest subset of measurements from a cluster according to the system
model defined in Chapter 4. G-MTT then uses the subset of measurements to refine the state
estimate, initialize the error covariance and calculate the initial track likelihood by filtering
in the measurements using the LG-IPDAF. From this process a new track is created. The
measurements used to initialize a new track are taken from the cluster and added to the
track’s consensus set. The track initialization process is discussed in detail in Chapter 8.
31

2.4 Track Management: Items 9-12 in Fig. 2.1
G-MTT performs the track management phase after the track initialization phase.
During this phase G-MTT searches for tracks that represent the same target using a track-
to-track association algorithm discussed in Chapter 9. If tracks are deemed to represent the
same target, they are fused together according to the track-to-track fusion algorithm derived
in Chapter 9. The track-to-track association and fusion algorithms assume that the tracks
are independent.
Next G-MTT looks at the track likelihood of each track. If the track likelihood is
below the threshold τTR, the track is rejected and removed from the algorithm. If the track
likelihood is above the threshold τTC , the track is confirmed to represent a target. When a
track is first confirmed to represent a target it is assigned a unique numerical label to identify
it from other confirmed tracks.
Due to the possibility that a track moves outside the surveillance region of all of the
sensors, G-MTT keeps a record of the last instance in time a measurement is associated to
the track. If no new measurement are associated to the track after a period of time, the
track is assumed far beyond any surveillance region and is removed.
To manage the computational and memory requirements, G-MTT will only store
up to M tracks. In the case that there are more than M tracks after the previous track
management steps, G-MTT will remove the tracks with the lowest track likelihood until
there are only M tracks. Therefore, G-MTT assumes that there are at most M targets in
the surveillance region. This assumption is not a limitation on the algorithm since M can
be arbitrarily large rather a limitation of the processing power. At the end of this phase,
G-MTT provides a list of confirmed tracks to the user.
2.5 Summary of Assumptions
Geometric multiple target tracking makes the following assumptions:
2.1. There are one or more targets that can be observed by the sensors and modeled by a
constant-velocity, white-noise-driven target model.
2.2. The number of targets in the surveillance region is unknown and can change.
32

2.3. A track is a possible representation of a target and may not actually represent a target
when initialized.
2.4. Initially there are no initialized tracks.
2.5. Targets are observable according to the system model.
2.6. Tracks are independent .
2.7. There are one or more sensors, and they may produce measurements synchronously or
asynchronously and out of chronological order.
2.8. The time interval between sensor scans is not fixed.
2.9. Sensor si detects a target with probability P siD ∈ [0, 1], with P si
D = 0 signifying that
the target is not in the sensor surveillance region of sensor si.
2.10. Each sensor produces at most one target originated measurement for each target per
sensor scan.
2.11. The false measurements are modeled as independently identically distributed (iid) with
uniform spatial distribution, and the number of false measurements every time sensor
si produces measurements is modeled using a Poisson distribution defined in equa-
tion (2.1) with spatial density λsi .
2.12. A target originated measurement from sensor si is associated to the track representing
the target with probability P siG provided that the track exists.
2.13. All of the measurement spaces are compatible.
2.14. The sensors’ measurement noises and the system model’s process noise are independent,
and thus uncorrelated.
33

CHAPTER 3. LIE GROUP REVIEW
Lie group theory is an extensive topic that we cannot thoroughly cover in this chapter.
The objective of this chapter is to provide a review of pertinent Lie group theory and to
establish additional notation. The review covers the definition of a group in Section 3.1,
applicable topological definitions in Section 3.2, applicable concepts of Riemannian manifolds
in Section 3.3, and basic theory regarding Lie groups in Section 3.4. We motivate each part
of the review by discussing the significance of each part in regards to Lie groups. This will
facilitate in understanding our approach in deriving the G-MTT algorithm in the subsequent
chapters.
We invite the reader to skim through the chapter and digest only the parts they are
more unfamiliar with. If a more in depth discussion is needed, we recommend the excellent
tutorials for robotics applications given in [14], [75]. We also recommend [10], [13], [31],
[76]–[78] for a more rigorous treatment of Lie group theory.
3.1 Group
In this section we present the definition of a group and a group action to explicitly
state what operations are valid when working with groups, and therefore Lie groups.
Definition 3.1.1. A group is a set G equipped with a binary operation defined on G denoted
• with the following group axioms:
3.1. Closure: For all g1, g2 ∈ G, g1 • g2 ∈ G.
3.2. Associative: For all g1, g2, g3 ∈ G, (g1 • g2) • g3 = g1 • (g2 • g3).
3.3. Identity Element: There exists an element I ∈ G such that for every g1 ∈ G, I • g1 =g1 • I = g1.
34

3.4. Inverse Element: For every g1 ∈ G there exists an element g2 ∈ G such that g1 • g2 =g2 • g1 = I. We denote this relation as g−1
1 = g2, where [·]−1 is the inverse map.
Definition 3.1.2. A commutative group is a group with the additional commutative
property: for every element g1, g2 ∈ G, g1 • g2 = g2 • g1.
An example of a commutative group is the set of all rotations in 2-dimensional space
called the special orthogonal group denoted SO (2). This group is the set
SO (2) ≜R ∈ R2×2 | RR⊤ = I2×2 and det (R) = 1
equipped with matrix multiplication where I2×2 is the 2× 2 identity matrix.
3.1.1 Group Action
Definition 3.1.3. Let S denote a set, s ∈ S be an element of the set S and (G, •) denote a
group. A group action of G on the set S is a map Φ : G× S → S with the properties
Φ (I, s) = s, and Φ (g, s) ∈ S, ∀g ∈ G, ∀s ∈ S.
There are three types of group actions: left group action, right group action, and conjugate
group action. The left group action of G on S is a group action with the additional
property
Φl (g2,Φl (g1, s)) = Φl (g2 • g1, s) .
The right group action of G on S is a group action with the additional property
Φr (g2,Φr (g1, s)) = Φr (g1 • g2, s) .
The conjugate group action of G on S is the composite of the left and right group action
defined as
Φc (g, s) = Φr
(g−1,Φl (g, s)
).
35

To demonstrate the group actions we will use the group SO (2) and the set of skew
symmetric matrices
so (2) ≜Ω ∈ R2×2 | Ω + Ω⊤ = 02×2
,
where 02×2 is the 2 × 2 zero matrix. Let R ∈ SO (2) and Ω ∈ so (2). The left group action
can be defined as Φl (R,Ω) = RΩ, the right group action can be defined as Φr (R,Ω) = ΩR,
and the conjugate group action can be defined as Φc (R,Ω) = RΩR−1.
By the definition of the group action and the properties of a group, any group can
define a group action on itself. In the rest of this dissertation we will drop the • notation
and the explicit group action map and simply use juxtaposition as we did in our example
regarding the group action of SO (2) on so (2).
3.2 Topology
This section defines a topological space and properties of topological spaces that are
relevant to Lie groups. The definitions can be difficult to understand so we give simple
examples and specify how the properties are relevant.
Definition 3.2.1. A topological space is a set S with a collection O of subsets called
open sets such that
3.1. ∅ ∈ O and S ∈ O, where ∅ is the empty set.
3.2. if U1, U2 ∈ O, then U1 ∩ U2 ∈ O.
3.3. the union of any collection of open sets is open.
A basic example is the real line where the collection of open sets is the unions of open
intervals.
Definition 3.2.2. A topological space is called first countable if for each s ∈ S and U1 ∈ Othat contains s, there exists another open set U2 ∈ O such that s ∈ U2 and U2 ⊊ U1, where
we use ⊊ to denote a proper subset. A proper subset is a subset that is not the original space.
This means that U2 = U1
36

An example of a first countable topological space is the real line. Regardless of the real
number a ∈ R, there is always a smaller open interval that contains a. The first countable
property means that the topological space can have a sequence of open sets U1, U2, . . . , Unsuch that Un ⊊ Un−1. However, if the sequence converges it is not guaranteed to converge
to a unique element since it may converge to an open set containing multiple elements.
Definition 3.2.3. A topological space is called Hausdorff if for every two distinct points
s1, s2 ∈ S there exists two disjoint sets U1, U2 ∈ O such that s1 ∈ U1 and s2 ∈ U2.
A basic example of a Hausdorff space is the real line. For any two distinct points
there exists two disjoint open intervals that contain the points. This means that if there
is an open set U containing two points s1, s2 ∈ U , there exists two disjoint open subsets
U1, U2 ⊊ U that contain one of the points each (e.g. s1 ∈ U1 and s2 ∈ U2). Topological
spaces that are both first countable and Hausdorff have sequences that converge to a unique
element in the set. In other words, limits on Hausdorff spaces that converge, converge to a
unique element. This is a necessary but not sufficient condition for defining derivatives and
integrals on a space.
Definition 3.2.4. A subset β ⊂ O is called a basis for the topology if each open set U ∈ Ois a union of elements in β. The topological space is called second countable if it has a
countable basis.
A second countable space is also first countable, but the converse it not necessarily
true.
Definition 3.2.5. Let T1 = (S1,O1) and T2 = (S2,O2) be two topological spaces and φ :
T1 → T2 be a bijective mapping from T1 to T2. If the map φ and its inverse are continuous,
then it is called a homeomorphism and the two topological spaces, T1 and T2, are said to
be homeomorphic.
A homeomorphism preserves the topological properties between homeomorphic spaces.
37

3.3 Riemannian Manifold
Definition 3.3.1. Let T = (S,O) be a topological space. T is called a topological manifold
if it has the following properties:
3.1. T is Hausdorff
3.2. T is second countable, and therefore first countable
3.3. T is locally Euclidean of dimension n. This means that each point of T is an element
of an open set U ∈ O that is homeomorphic to an open subset of the Euclidean space
Rn.
The first two properties mean that converging limits on T converge to a unique point.
The third property means that for each t ∈ T there exists an open subset U ⊆ T that contains
t, an open subset V ⊆ Rn, and a homeomorphism φ : U → V . Since a homeomorphism
preserves topological properties, the topology T must have the same topological properties
as Euclidean space. Since Euclidean space is Hausdorff and second countable, the topological
manifold must also have these properties. This is one of the reasons why these properties
are necessary. The homeomorphism allows us to analyze the local topological properties
of U by looking at V . This is useful because working in Euclidean space may be easier
than working in the original manifold T . In addition, Euclidean space may have additional
structure that the manifold T does not. For example, the manifold T may not have a vector
space structure, and so we cannot scale or add elements of T together, but those operations
are defined in Euclidean space.
Definition 3.3.2. A chart on the topological manifold T is a tuple (φ,U) where φ : U ⊂T → V ⊂ Rn is a homeomorphism and U ∈ O and V are open subsets. The subset V is
called the local representation of U , and for u ∈ U , the element φ (u) ∈ V is called the local
coordinates of u.
Fig. 3.1 shows an example of two charts where T is the topological manifold, (φ1, U1)
and (φ2, U2) are charts defined on T where φ1 : U1 → V1, φ2 : U2 → V2, and V1, V2 ⊆ Rn.
For an example of a chart consider the unit circle defined by the topological manifold
S1 = (x, y) ∈ R2 | x2+y2 = 1. We define the chart (φ,U) where φ ((x, y)) = arctan2 (y, x),
38

Figure 3.1: A depiction of two compatible charts (φ1, U1) and (φ2, U2) where T is a topologicalmanifold, U1 and U2 are not disjoint sets, and Rn denotes Euclidean space.
U = (x, y) ∈ S1 | x = −1 and φ (U) = V = (−π, π). This chart is depicted in Fig. 1.8
which is used to illustrate why defining a system model in local coordinates fails to preserve
global properties. We emphasize that the subset V is homeomorphic to U , and therefore
only preserves the local topological properties of U , and is not guaranteed to preserve global
geometric properties.
Definition 3.3.3. Two charts (φ1, U1) and (φ2, U2) are said to be smoothly compatible if
either U1 and U2 are disjoint or φ1 φ−12 : φ2 (U1 ∩ U2) → φ1 (U1 ∩ U2) is a diffeomorphism
as shown in Fig. 3.1. A maximal smooth atlas A is a collection of all smoothly compatible
charts whose domain covers T .
A diffeomorphism not only preserves the topological properties between the diffeo-
morphic spaces, but also the properties of their tangent spaces. Thus, a maximal smooth
atlas allows us to map open sets of a topological manifold to open sets in Euclidean space
and perform operations defined in Euclidean space that involve the tangent space such as
integration and differentiation. For example, to integrate a curve on the manifold you would
begin integration at the local coordinates at the start of the curve in one chart, and then
move to other charts that cover the other parts of the curve. Similarly we can find the
tangent vectors along a curve by taking the derivative of a curve in a chart.
39

Definition 3.3.4. A smooth manifold M = (T,A) is a topological manifold with a maximal
smooth atlas.
An example of a smooth manifold is Euclidean space where the atlas contains a single
chart where the diffeomorphism is the identity map and the corresponding open set is the
Euclidean space itself. We will provide other examples of smooth manifolds throughout the
dissertation.
Definition 3.3.5. Let M denote an n-dimensional smooth manifold. At each point m ∈M
there is an n-dimensional tangent space (denoted TmM). The collection of tangents spaces
at all the point in M is called the tangent bundle denoted TM = (m,TmM) | m ∈M.
A depiction of different tangent spaces is shown in Fig. 3.2 where M denotes the
n-dimensional smooth manifold, m1,m2,m3 ∈ M and Tm1M , Tm2M and Tm3M are their
corresponding tangent spaces. The tangent spaces are disjoint from each other implying
that a vector v1 ∈ Tm1M cannot be directly compared to a vector in v2 ∈ Tm2M , and
therefore we cannot simply add the two vectors together. In order to compare vectors from
different tangent spaces, the vectors must be mapped to a single tangent space. We often
do not think about the tangent spaces being disjoint since we typically work in Euclidean
space where the mapping between tangent spaces is the identity map. The important thing
for us, is to ensure that vectors are in the same tangent space when we add them together.
This is an important concept when deriving the LG-IPDAF algorithm in Section 6.
Definition 3.3.6. A Riemannian metric of a smooth manifold is an inner product defined
on the tangent space at each point on the manifold that varies differentiably between tangent
spaces. A smooth manifoldM equipped with a Riemannian metric d is called a Riemannian
manifold and denoted R = (M, d).
An inner product measures lengths and angles; thus, a Riemannian metric measures
the length of tangent vectors and angles between tangent vectors. This is beneficial for many
reasons. One of which is to measure the length of curves. For example, let M be a smooth
manifold, γ1 : [0, 1] → M and γ2 : [0, 1] → M be two curves defined on the manifold such
that γ1 (0) = γ2 (0) = m1 and γ1 (1) = γ2 (1) = m2 as shown in Fig. 3.3. Now suppose we
are interested in finding which curve has the shortest path from m1 to m2.
40

Figure 3.2: A depiction the smooth manifold M and tangent spaces at the points m1, m2, and m3.
To calculate the length of the curves, we can map the curves to local coordinates
using its atlas, and calculate the derivative of the curves to compute their tangent vectors
(denoted by blue arrows in Fig. 3.3). Using Proposition 2.10 of [25], that a smooth manifold
has a Riemannian metric, we can then equip the manifold with a Riemannian metric and
calculate the length of each curve by integrating over the length of the tangent vectors that
compose each curve.
Now suppose that we are interested in finding the “straightest curve”. In a similar
way as finding the length of each curve, we can measure how the direction of the tangent
vectors are changing along the curve since the Riemannian metric can measure angles be-
tween tangent vectors. The curve whose tangent vectors change the least in direction is the
“straightest curve.” A smooth manifold can be equipped with different Riemannian met-
rics. For this dissertation we use the induced Riemannian metric obtained by embedding
the manifold in Euclidean space. For the purposes of this dissertation, we do not need to
explicitly define that metric.
Definition 3.3.7. Let I ⊂ R, R denote a Riemannian manifold, TR denote its tangent
bundle and γ : I × TR → R be a parameterized curve such that γ (0, (p, v)) = p where p ∈ R
and v ∈ TpR. The parameterized curve is called a geodesic if it is straight according to the
Riemannian metric.
41

Figure 3.3: A depiction of the two curves γ1 : [0, 1] → M and γ2 : [0, 1] → M that begin at thepoint m1 ∈ M and end at the point m2 ∈ M , and their respective tangent vectors at differentpoints along the curve.
For a more formal definition of a geodesic see Definition 2.1 from [25].
Definition 3.3.8. A Riemannian manifold R is geodesically complete if for all p ∈ R
and for all v ∈ TpR there exists a geodesic γ : I × TR → R starting from p and is defined
for all values of t ∈ I.
The property of a Riemannian manifold being geodesically complete has many use-
ful implications according to the Hopf-Rinow Theorem. It states that if R is geodesically
complete, then for any two points p1, p2 ∈ R, there exists a geodesic between them. In other
words, there is at least one (possibly infinite) number of straight paths between any two
points. It also implies that the manifold is connected.
Definition 3.3.9. Let R be a Riemannian manifold and TR the corresponding tangent
bundle. The exponential map, denoted ExpR : TR → R, is the geodesic curve γ : I×TR →R restricted to the domain 1 × TM . e.g. let (p, v) ∈ TR, then ExpR (p, v) = γ (1, (p, v)).
The exponential map can be thought of as traveling from the point p in the direction of v for
unit length of time.
We denote the restriction of the exponential map at a point p ∈ R as ExpRp : TpR → R.
According to the Hopf-Rinow Theorem, if the Riemannian manifold is geodesically complete,
42

the exponential map ExpRp is a surjection from TpR to R, and there exists an open subset
V ∈ TpR and an open subset U ∈ R containing p with the relation ExpRp (U) = V such that
the exponential map restricted to V (denoted Expp |V ) is a diffeomorphism between V and
U [25]. This property has several important implications for us.
3.1. The map Expp |V has a smooth inverse called the logarithm map and is denoted
Logp |U .
3.2. The tuple(Logp, U
)is a smooth chart.
3.3. For any point q ∈ U , the geodesic from p to q is not only a straight curve, but the
shortest curve between the two points. (Proposition 3.6 from [25])
These properties imply that for a geodesically complete manifold we can find the
shortest path between two points and move from one point towards the other by finding
the vector that points from the first point to the second and moving in the direction of the
vector. An example of where this is applicable is state estimation. Suppose that the state
estimate is at a point p1 and a measurement is at a point p2. Using the logarithm map
we can create a geodesic connecting the two points and move from p1 towards p2 along the
straightest path. How this is precisely done will be shown in Section 6.
3.4 Lie Group
Definition 3.4.1. A Lie group is a Riemannian manifold G that is also a group in the
algebraic sense with the property that its binary operator and inverse map are both smooth.
We restrict our discussion of Lie groups to geodesically-complete, unimodular Lie
groups. A unimodular Lie group, is a Lie group whose group actions have a determinant of
one; i.e. they persevere volume. An example of a Lie group is the Special Euclidean group
of 2-dimensions defined as the set
SE (2) =
R p
01×2 1
∈ R3×3
∣∣∣∣∣∣
R ∈ SO (2) and p ∈ R2
,
43

with the binary operation being matrix multiplication, the inverse operation being the matrix
inverse, and the identity element being I3×3. We use In×n to denote the n×n identity matrix
and 0m×n to denote the m× n zeros matrix.
In this dissertation we do not specify the atlas used by the Lie group since we only
work in a single chart whose diffeomorphism is the exponential map, and the other charts
are unnecessary. We use the exponential map defined by the induced Riemannian metric
obtained by embedding the Lie group in an equal or higher-order Euclidean space. We do
not explicitly specify this metric since we do not use it directly, but we will specify the
exponential maps when we provide examples.
The tangent space of a Lie group G at the identity element is called the Lie algebra
of G and is denoted g ≜ TIG.
Definition 3.4.2. A Lie algebra g on the field of real numbers R is a real vector space
equipped with a binary map called the Lie bracket [·, ·] : g×g → g that satisfies the following
properties for all V1, V2, V3 ∈ g:
3.1. Bilinearity: For a1, a2 ∈ R,
[a1V1 + a2V2, V3] = a1 [V1, V3] + a2 [V2, V3]
[V3, a1V1 + a2V2] = a1 [V3, V1] + a2 [V3, V2] .
3.2. Antisymmetry: [V1, V2] = − [V2, V1]
3.3. Jacobi Identity: [V1, [V2, V3]] + [V2, [V3, V1]] + [V3, [V1, V2]] = 0
As an example, the Lie algebra of SE (2) is defined as the set
se (2) =
[ω]1× ρ
01×2 0
∈ R3×3
∣∣∣∣∣∣
ω ∈ R and ρ ∈ R2
,
where [·]1× is the skew symmetric operator defined in equation (C.3), and the bracket is
defined as [v1,v2] ≜ v1v2 − v2v1 where v1,v2 ∈ se (2).
The Lie algebra can take on various representations; however, by taking advantage of
its algebraic structure, elements of the Lie algebra can be expressed as the linear combination
44

of orthonormal basis elements ei where ei ∈ so (2). For example, let v ∈ se (2), then
v =∑3
i=1 aiei with ai denoting the coefficient associated with ei and where
e1 =
0 −1 0
1 0 0
0 0 0
e2 =
0 0 1
0 0 0
0 0 0
e3 =
0 0 0
0 0 1
0 0 0
.
The coefficients form an algebraic space isomorphic to the Lie algebra that we refer
to as the Cartesian algebraic space denoted RG where the subscript changes based on its
corresponding Lie group. Elements in the Cartesian algebraic space can be represented using
matrix notation as v = [a1, a2, . . .]⊤. Note that we distinguish between elements of the Lie
algebra using the bold font v ∈ g and their corresponding element in the Cartesian algebraic
space using the normal font v ∈ RG.
To map between the Lie algebra and its corresponding Cartesian algebraic space, we
use the the isomorphisms ·∧ : RG → g and ·∨ : g → RG called the wedge and vee maps
respectively. For an example, let v =
[ω]1× ρ
01×2 0
∈ se (2) the vee map for se (2) is defined
as
v∨ =
ρ
ω
= v ∈ RSE(2), (3.1)
and the wedge map is the inverse. Since the vee and wedge maps are linear isomorphisms,
any function and property defined on the Lie algebra can extended to its Cartesian algebraic
space. This permits us to work in the Cartesian algebraic space instead of the Lie algebra.
Fig. 3.4 depicts the relationship between a Lie group G, its Lie algebra g, and its
corresponding Cartesian algebraic space RG. Note that the Lie algebra and the Cartesian
algebraic space are defined as the tangent space of the Lie group at the identity element.
For other examples of common Lie groups in robotics see Appendix C.
3.4.1 Adjoints
Lie groups can perform group actions on itself and on their Lie algebra. We specify
the group actions by juxtaposition of an element of the group g ∈ G with an element of the
45

Figure 3.4: A depiction of the relationship between a Lie group G, its Lie algebra g, and itscorresponding Cartesian algebraic space RG.
Lie algebra v ∈ g such that gv is the left group action of g on v and vg is the right group
action.
The adjoint of g ∈ G is the conjugate group action of G on v ∈ g defined as
AdGg (v) ≜ gvg−1.
Let v ∈ RG with the relation v = v∨. The matrix adjoint of g ∈ G is a matrix representation
of G denoted AdGg such that AdGg v =(AdGg (v)
)∨. As an example, let g ∈ SE (2), v ∈ se (2),
and v ∈ RSE(2). The adjoint of SE (2) on se (2) is
AdSE(2)g (v) = gvg−1
=
R p
01×2 1
[ω]1× ρ
0 0
R p
01×2 1
−1
.
The matrix adjoint of SE (2) on RSE(2) is derived in [79] and is
AdSE(2)g =
R − [p]1×
01×2 1
.
It can be shown that AdSE(2)g v =
(
AdSE(2)g (v)
)∨
.
46

Let v1,v2 ∈ g and v1, v2 ∈ RG with the relations v∨1 = v1 and v∨
2 = v2. Another
adjoint is the adjoint of v1 ∈ g on g denoted adg
v1: g → g and is defined as
adGv1(v2) ≜ [v1,v2] ,
where [·, ·] is the Lie bracket defined in Definition 3.4.2. The matrix adjoint of v1 ∈ RG on
RG is a representation of RG denoted adGv1 such that adGv1v2 =(adG
v1(v2)
)∨. For example
let v1,v2 ∈ se (2) and v1, v2 ∈ RSE(2) with the relations v∨1 = v1 and v∨
2 = v2. The adjoint
of se (2) on se (2) is defined as
adSE(2)v1
(v2) = [v1,v2]
= v1v2 − v2v1,
and the matrix adjoint of v1 ∈ RSE(2) on RSE(2) is derived in [13] and is
adSE(2)v1
=
[ω1]1× − [1]1× ρ1
0 0
.
It can be shown that adSE(2)v1
v2 =(
adSE(2)v1
(v2))∨
. An interesting aside is that the matrix
adjoint of g is the Lie algebra of the matrix adjoint of G.
3.4.2 Exponential Map at Identity
When working with Lie groups we restrict the exponential and logarithm map at the
identity element of the Lie group G and generically define them as
ExpGI : RG → G
LogGI : G→ RG.
Note that we define the exponential map at identity with the domain as the Cartesian
algebraic space instead of the Lie algebra. When working with the logarithm map, it is
implied that its domain is restricted to the subset U ⊂ G such that the exponential map is
47

bijective. This means that there might be a subset V = G/U for which the logarithm map is
not defined. For geodesically-complete Lie groups, the subset V is so small compared to U
and sufficiently far enough from the Group identity element that this technicality is almost
always ignored. In this dissertation we ignore this technicality, but mention it to make you
aware of it. For the rest of this dissertation we will refer to the exponential map on Lie
groups restricted to the Lie group’s identity element as the exponential map.
For matrix Lie groups, the exponential and logarithm maps are the matrix exponential
and logarithm maps composed with the wedge and vee functions. For example, the Lie group
SE (2) is a matrix Lie group and its exponential and logarithm maps are defined as
ExpSE(2)I : RSE(2) → SE (2) ≜ Expm ∧
LogSE(2)I : SE (2) → RSE(2) ≜ ∨ Logm,
where Expm and Logm are the matrix exponential and logarithm. By definition, the matrix
exponential and logarithm are infinite Taylor series; however, there exists closed form solu-
tions for many matrix Lie groups. For example, let g ∈ SE (2) and v ∈ RSE(2), the closed
form solution of exponential and logarithm maps are
ExpSE(2)I (v) = Exp
SE(2)I
ρ
ω
=
Exp
SO(2)I (ω) V (ω) ρ
01×2 1
(3.2)
LogSE(2)I (g) = Log
SE(2)I
R p
01×2 1
=
V(
LogSO(2)I (R)
)−1
p
LogSO(2)I (R)
, (3.3)
where ExpSO(2)I and Log
SO(2)I are defined in equations (C.6) and (C.7) and the function V is
defined in equation (C.23). Unfortunately, not every Lie group is isomorphic to a matrix Lie
group; however, most of the interesting Lie groups are [77]. Thus, the matrix exponential
can serve as the exponential map for the majority of the interesting Lie groups.
Lie groups are able to shift the exponential map from the identity element using the
left and right group actions. To show how this is done, let g1, g2, g3 ∈ G and v ∈ RG with
48

the relation
g2 = g1ExpGI (v) .
This is a geodesic from g1 to g2 in the direction of the tangent vector v formed by using the
exponential map at identity and the left group action. In a way we are shifting the geodesic
from beginning at the identity element to beginning at g1. This concept is shown in Fig. 3.5,
and is referred to as left trivialization. Similarly we can form another geodesic from g1
to g3 in the direction of the tangent vector v using the exponential map at identity and the
right group action such that
g3 = ExpGI (v) g1.
This is referred to as right trivialization. The element g2 = g3 only if v = 0, g1 = I, or
the Lie group is commutative.
Figure 3.5: A depiction of a geodesic from g1 ∈ G to g2 ∈ G in the direction of v ∈ RG using theexponential map.
We can relate the left and right trivializations using the matrix adjoint on G. Let
v1, v2 ∈ RG and g1, g2 ∈ G with the relation g2 = g1ExpGI (v1) = ExpGI (v2) g1. The vectors
v1 and v2 are related by the matrix adjoint as
v2 = AdGg1v1 (3.4)
49

as discussed in [14]. In this dissertation we will primarily use the left trivialization to shift
geodesics from the group identity to other elements of the Lie group.
3.4.3 Jacobians of the Exponential Map
When working with Lie groups we need the partial derivatives of the exponential and
logarithm maps. These differentials are commonly called the right and left Jacobians and
correspond the right and left trivializations. The right and left Jacobians and their inverses
are defined to map elements of RG to the general linear group (set of invertible matrices)
that acts on RG. Let v ∈ RG, they are defined as
JGr (v) =∞∑
n=0
(−adGv
)n
(n+ 1)!, JGl (v) =
∞∑
n=0
(adGv
)n
(n+ 1)!,
JG−1
r (v) =∞∑
n=0
Bn
n!
(−adGv
)n, JG
−1
l (v) =∞∑
n=0
Bn
n!
(adGv
)n,
where Bn denote the Bernoulli numbers. The derivation of the left and right Jacobians
stems from the Baker-Campbell-Hausdorff formula and can be studied in [13], [77]. The
right Jacobian has the properties that for any v ∈ RG and any small v ∈ RG,
ExpGI (v + v) ≈ ExpGI (v) ExpGI(JGr (v) v
)(3.7a)
ExpGI (v) ExpGI (v) ≈ ExpGI
(
v + JG−1
r (v) v)
(3.7b)
Similarly for the left Jacobian,
ExpGI (v + v) ≈ ExpGI(JGl (v) v
)ExpGI (v)
ExpGI (v) ExpGI (v) ≈ ExpGI
(
v + JG−1
l (v) v)
.
50

For SE (2) and many other matrix Lie groups, the Jacobians have closed form solu-
tions. As an example let v ∈ RSE(2), the right Jacobian for SE (2) is
JSE(2)r (v) = JSE(2)
r
ρ
ω
=
Wr (ω) Dr (ω) ρ
01×2 1
(3.8)
where
Wr (ω) =
I if ω = 0
cosω−1ω
[1]× + sinωωI else
Dr (ω) =
I2
if ω = 0
1−cosωω2 [1]× + ω−sinω
ω2 I else
.
3.4.4 Direct Product Group
In this dissertation we occasionally combine a Lie group with another Lie group or
Cartesian algebraic space to form a new Lie group using the direct product. We can use a
Cartesian algebraic space to form a new Lie group since it is a Riemannian manifold and
has a group structure with the binary operator being addition; thus, the Cartesian algebraic
space is a Lie group with additional structure.
To show how we form a new Lie group, we will use the target’s state as an example.
We assume that the target has nearly constant velocity. Its pose is modeled as an element of
the Lie group g ∈ G, and its velocity is modeled as an element of the Cartesian algebraic space
v ∈ RG; thus, the target’s state is the the direct product of the Lie group G and the Cartesian
algebraic spaceRG denoted Gx ≜ G×RG. The operator of this Lie group is inherited from its
subgroups G and RG. Since RG is an algebraic space, it has a commutative group structure
with the group operator being addition. Let x1 = (g1, v1) ∈ Gx and x2 = (g2, v2) denote two
different states, the group operator and inverse of Gx are
x1 • x2 = (g1 • g2, v1 + v2) ,
51

x−11 =
(g−11 ,−v1
),
where the symbol • denotes the binary operator of G, the addition symbol denotes the
binary operator of RG, which is standard addition, and v−11 = −v1 since it is an element of
an algebraic space.
The corresponding Cartesian algebraic space of Gx= G×RG is Rx ≜ RG×RG. Let
u = (ug, uv) ∈ Rx and x = (g, v) ∈ Gx, the exponential and logarithm maps are
ExpGxI (u) =
(ExpGI (ug) , uv
)(3.9a)
LogGxI (x) =
(LogGI (g) , v
), (3.9b)
since the exponential map in Euclidean space is the identity map. The right Jacobian of Gx
is
JGxr (u) =
JGr (ug) 0n×n
0n×n I
. (3.10)
For more information about the direct product group see [80].
3.4.5 First Order Taylor Series and Partial Derivatives
Let g, g ∈ G, and let g ∈ RG be a small perturbation from I ∈ Rg with the relation
g = gExpGI (g). Also let f : G→ G be an arbitrary function. The first order Taylor series of
f evaluated at g is
f (g) ≈ f (g) ExpGI
(
∂f
∂g
∣∣∣∣g=g
g
)
,
where ∂f∂g
∣∣∣g=g
is the partial derivative of f with respect to g evaluated at g = g. Using the
definition and notation shown in [14] the partial derivative of f with respect to g is defined
as∂f
∂g= lim
τ→0
LogGI(f (g)−1 f
(gExpGI (τ)
))
τ(3.11)
where τ ∈ RG.
52

In Equations (3.11), we abuse notation by denoting the vector of the numerator
divided by each element of τ , as the numerator divided by the vector τ . Note that the limit
in equation (3.11) is done in the Cartesian algebraic space instead of the Lie group. This
is because derivatives are defined only on vector spaces. Since not every Lie group has a
vector space structure, we make use of the exponential map to perform the derivative in the
Cartesian algebraic space since it is a vector space.
3.4.6 Expressing Uncertainty on Lie Groups
We use Gaussian distributions to model the uncertainty in the sensor, state estimate,
and system model. As an example, let x ∈ Rx be a zero-mean, Gaussian random variable
with mean µ and covariance P denoted x ∼ N (µ = 0, P ) with the probability density
function defined as
p (x) = η exp
(
−1
2x⊤P−1x
)
(3.12)
with η denoting the normalizing coefficient. Gaussian distributions are defined on vector
spaces. Since not every Lie group has a vector space structure (e.g. SE (2) is not a vector
space since scalar multiplication is not defined on the set) Gaussian distributions cannot
be defined directly on every Lie group. However, they can be defined on the Cartesian
algebraic space at the identity element of the Lie group and extended to the Lie group
using the exponential map. Thus, the probability of an element of the Lie group is the
probability of the corresponding element of the Cartesian algebraic space. For example, let
x1 = ExpGxI (x1) where x1 ∈ Gx and x1 ∈ Rx. The probability of x1 is the probability of
x1 which is p (x = x1) as defined in (3.12). This relation is depicted in Fig 3.6 where the
random variable x is defined on the tangent space with a Gaussian distribution depicted as
a green curve and centered at the origin.
For the uncertainty to be indirectly defined over the entire Lie group, the Lie group
is required to be geodescially complete. This allows the Gaussian distribution to extend to
every element of the Lie group via the exponential map.
Depending on the Lie group, the exponential map may not be injective, which means
that possibly an infinite number of elements of the Cartesian algebraic space will map to the
53

Figure 3.6: A depiction of the Gaussian distribution.
same element of the Lie group. In this case, we require the uncertainty to have a concentrated
Gaussian density (CGD) [81]. The CGD is a zero mean Gaussian distribution that is tightly
focused around the origin of the Cartesian algebraic space, where by tightly focused we mean
that the majority of the probability mass is in a subset U ⊆ Rx centered around the origin
such that the exponential mapping from U to Gx is injective, and that the probability of an
element not being in U is negligible. This property allows us to ignore the probability of an
element being outside of U .
The CGD can be centered at another element other than the group identity element
using the group action provided that the Lie group is unimodular. The unimodular property
ensures that as the Gaussian distribution is moved on the manifold, its probability mass
density does not change. To show how uncertainty is moved around, let the target’s state
be represented as
x = xExpGxI (x) , (3.13)
where x ∈ Gx is the target’s state estimate and x is the error state whose probability density
function is defined in equation (3.12). The exponential function maps the random variable
x to the Lie group, and the state estimate moves the uncertainty to the target’s state while
preserving the distribution of the probability density functions. These properties allow the
probability of the state x to be related to the corresponding probability of the error state x.
54

Thus, the uncertainty distribution of x is defined by the distribution of x as
p (x) = η exp
(
−1
2LogGx
I
(x−1x
)⊤P−1LogGx
I
(x−1x
))
(3.14a)
= η exp
(
−1
2x⊤P−1x
)
= p (x) . (3.14b)
With a slight abuse of notation, we denote the probability density function (PDF) of the
state x as x ∼ N (x, P ) where x is the state estimate and P is the error covariance of the
error state x.
An advantage to representing the uncertainty in the Cartesian algebraic space is
having a minimum representation of the uncertainty. For example, an element of the matrix
group SE (2) has three dimensions but is represented by a 3× 3 matrix with nine elements.
Representing the uncertainty directly on the set of 3× 3 matrices with nine elements would
require the covariance to be 9 × 9; whereas, the corresponding Cartesian algebraic space
only has three components and the corresponding covariance matrix will be 3× 3. For more
information about representing uncertainty on Lie groups see [27], [36], [82], [83].
55

CHAPTER 4. SYSTEM MODEL
We assume that the target can be modeled using a constant-velocity, Gaussian white-
noise driven, time-invariant system model. Under this assumption, the target’s state is the
direct product of the pose (e.g. position and orientation) and the twist (e.g. translational
and angular velocities), where the pose is an element of a Lie group g ∈ G and the twist is an
element of the Cartesian algebraic space v ∈ RG. We denote the target’s state at time tk ∈ R
as xk = (gk, vk) ∈ Gx ≜ G×RG. Let ti:k ∈ R denote the time interval from time ti to time
tk. The system process noise over the time interval ti:k is modeled as a Wiener process as
defined in [24] and is denoted qi:k = (qgi:k, qvi:k) ∼ N (0, Q (ti:k)) ∈ Rx, where q
gi:k ∈ RG is the
process noise that corresponds to the pose, qvi:k ∈ RG is the process noise that corresponds
to the twist, and Rx= RG ×RG is the Cartesian algebraic space of Gx.
We assume that there are one or more sensors that observe the target at fixed or
non-fixed time intervals, and that some or all of the sensors may provide measurements at
the same time. To distinguish between the sensors we use the indexing set S = 1, 2, 3, . . .,where si ∈ S denotes the ith sensor. The measurements from sensor si are elements of sensor’s
measurement space denoted Gsi with corresponding Cartesian algebraic space Rsi . We
denote a measurement from sensor si at time tk as zsik ∈ Gsi , and we denote the measurement
noise from sensor si at time tk as rsik ∼ N (0, Rsi) ∈ Rsi .
Under the specified assumptions, the generic, discrete system model is
xk = f (xi, qi:k, ti:k) (4.1a)
zsik = hsi (xk, rsik ) , (4.1b)
where f : Gx ×Rx × R → Gx is the state transition function defined as
f (xi, qi:k, ti:k) ≜ xiExpGxI ((ti:kvi + qgi:k, q
vi:k)) (4.2a)
56

=(giExp
GI (ti:kvi + qgi:k) , vi + qvi:k
), (4.2b)
and hsi : Gx × Rsi → Gsi is the observation function. We do not explicitly define the
observation function since it is application dependent; however, we will provide examples
of observation functions when we present applications of G-MTT later on. This system
model is similar to the one defined in [84], with the difference being how the process noise
is modeled.
By the definition of the state transition function, the state is propagated forward in
time when tk > ti, backwards in time when tk < ti, and remains unchanged when tk = ti.
4.1 System Affinization
The uncertainty in the system model is represented by Gaussian random variables
defined in the Cartesian algebraic spaces of the state and measurement. Depending on the
system model for a particular Lie group, the propagation of the Gaussian random variables
are either affine or nonaffine. In the affine case, the random variables retain their Gaus-
sian structure, and in the nonaffine case the random variables lose their Gaussian structure
because Gaussian random variables are only preserved under affine transformations.
In the nonaffine case and under the assumption that the signal-to-noise ratio (SNR)
is high, the Gaussian structure of the random variables can be preserved with little loss
of information by approximating their propagation as affine. This does not mean that the
system model is affine, but rather the propagation of the random variables or uncertainty is
affine. For lack of a better term, we refer to this “affinized” form as the affine system model.
The assumption that the signal-to-noise ratio is high comes from the extended Kalman filter.
It means that the zero-mean noise is tightly concentrated about the mean; thus, the majority
of the information about the noise is within a small perturbation of the mean and can be
well approximated by an affine system.
Let xi = xiExpGxI (xi) where xi is the target’s state estimate, and xi ∈ Rx is the error
state and is small. The system model is made “affine” by computing its first order Taylor
57

series at the points
ζfi:k= (xi = xi, qi:k = 0, ti:k) (4.3)
ζhsik= (xk = xk, r
sik = 0) , (4.4)
using the method discussed in Subsection 3.4.5. The affine system model requires calculating
the Jacobians of the state transition function and observation functions with respect to the
state, process noise, and measurement noise.
The Jacobians of the state transition function can be explicitly defined for all Lie
groups and are derived in this section. We generically define the Jacobians of the observation
function in this section, and we explicitly define them when we get to specific examples.
Lemma 4.1.1. Given the discrete, time-invariant model in equations (4.1) and (4.2), the
Jacobians of the state transition function and observation functions evaluated at the points
ζfi:k and ζhsik are
Fi:k=∂f
∂x
∣∣∣∣ζfi:k
=
AdG
ExpGI (ti:k vi)−1 JGr (ti:kvi) ti:k
0n×n In×n
(4.5a)
Gi:k=∂f
∂q
∣∣∣∣ζfi:k
=
JGr (ti:kvi) 0n×n
0n×n In×n
(4.5b)
Hsik
=∂hsi
∂x
∣∣∣∣ζhsik
(4.5c)
V sik
=∂hsi
∂rsi
∣∣∣∣ζhsik
, (4.5d)
where n is the dimension of the target’s pose.
Consequently,if the process noise and measurement noise are concentrated about its
zero-mean and xi ∈ Gx is a state estimate that is close to xi, and if the error state between
xi and xi is defined as xi= LogGx
I
(x−1i xi
)∈ Rx, then the evolution of the system can be
described by the “affinized system”
xk ≈ f (xi, 0, ti:k)ExpGxI (Fi:kxi +Gi:kqi:k) (4.6a)
58

zsik ≈ hsi (xk, 0)ExpGsiI (Hsi
k xk + V sik r
sik ) , (4.6b)
and the propagated error state is xk ≈ Fi:kxi + Gi:kqi:k. Note how the propagation of the
random variables are affine; therefore, preserving the Gaussian structure or the random
variables.
Proof. We begin with deriving Fi:k. The Jacobian Fi:k is evaluated with the process noise
set to zero, so to simplify this derivation we will initially set the process noise to zero as it
will have no impact on the derivation. Let τ = (τ g, τ v) ∈ Rx where τ g, τ v ∈ RG denote the
perturbation of the state when computing the derivative. The derivation of Fi:k is written
as if we are perturbing the state by the vector τ where all of its elements are simultaneously
non-zero; however, we are only perturbing the state by a single element of τ at a time. We
do this to condense notation.
Using the definition of the derivative in equation (3.11)
∂f
∂xi= lim
τ→0
LogGxI
(f (xi, 0, ti:k)
−1 f(xiExp
GxI (τ) , 0, ti:k
))
τ.
Substituting the definition of the state transition function in equation (4.2) yields
∂f
∂xi= lim
τ→0
LogGxI
((giExp
GI (ti:kvi) , vi
)−1 (giExp
GI (τ g) ExpGI (ti:kvi + ti:kτ
v) , vi + τ v))
τ
= limτ→0
LogGxI
((ExpGI (ti:kvi)
−1 g−1i giExp
GI (τ g) ExpGI (ti:kvi + ti:kτ
v) , vi + τ v − vi))
τ
= limτ→0
LogGxI
((ExpGI (ti:kvi)
−1 ExpGI (τ g) ExpGI (ti:kvi + ti:kτv) , τ v
))
τ
Using the property of the adjoint in equation (3.4) and the property of the right
Jacobian in equation (3.7) gives
∂f
∂xi= lim
τ→0
LogGxI
((
ExpGI (ti:kvi)−1 ExpGI (τ g) ExpGI (ti:kvi) Exp
GI
(JGr (ti:kvi) ti:kτ
v), τv))
τ
= limτ→0
LogGxI
((
ExpGI
(
AdGExpGI (ti:kvi)
−1τg)
ExpGI(JGr (ti:kvi) ti:kτ
v), τv))
τ
59

= limτ→0
(
LogGI
(
ExpGI
(
AdGExpGI (ti:kvi)
−1τg)
ExpGI(JGr (ti:kvi) ti:kτ
v))
, τv)
τ
The portion of the derivative corresponding to τ g is computed as
∂f
∂gi= lim
τg→0
(
LogGI
(
ExpGI
(
AdGExpGI (ti:kvi)
−1τ g))
, 0)
τ g(4.7a)
= limτg→0
(
AdGExpGI (ti:kvi)
−1τ g, 0)
τ g=
AdG
ExpGI (ti:kvi)−1
0n×n
, (4.7b)
and the portion of the derivative corresponding to τ v is computed as
∂f
∂vi= lim
τv→0
(LogGI
(ExpGI
(JGr (ti:kvi) ti:kτ
v)), τ v)
τ v(4.8a)
= limτv→0
(JGr (ti:kvi) ti:kτ
v, τ v)
τ v=
JGr (ti:kvi) ti:k
In×n
. (4.8b)
Combining equations (4.7b) and (4.8b) yields (4.5a).
Next we derive the Jacobian Gi:k. This Jacobian is evaluated with the process noise
set to zero, so to simplify the derivation we will initially set the process noise to zero as it
will have no impact on the derivation. Let ξ = (ξg, ξv) ∈ Rx denote the perturbation of the
process noise when computing the derivative where ξg, ξv ∈ RG. From equation (4.1) we
have∂f
∂q= lim
ξ→0
LogGxI
(f (xi, 0, ti:k)
−1 f (xi, ξ, ti:k))
ξ.
Substituting the definition of the state transition function in equation (4.2) yields
∂f
∂q= lim
ξ→0
LogGxI
((giExp
GI (ti:kvi) , vi
)−1 (giExp
GI (ti:kvi + ξg) , vi + ξv
))
ξ
= limξ→0
LogGxI
((ExpGI (ti:kvi)
−1 g−1i giExp
GI (ti:kvi + ξg) , vi + ξv − vi
))
ξ
= limξ→0
LogGxI
((ExpGI (ti:kvi)
−1 ExpGI (ti:kvi + ξg) , ξv))
ξ
Using the property of the right Jacobian in equation (3.7) gives
60

∂f
∂q= lim
ξ→0
LogGxI
((ExpGI (ti:kvi)
−1 ExpGI (ti:kvi) ExpGI
(JGr (ti:kvi) ξ
g), ξv))
ξ
= limξ→0
LogGxI
((ExpGI
(JGr (ti:kvi) ξ
g), ξv))
ξ
= limξ→0
(LogGI
(ExpGI
(JGr (ti:kvi) ξ
g)), ξv)
ξ
= limξ→0
(JGr (ti:kvi) ξ
g, ξv)
ξ
=
JGr (ti:kvi) 0n×n
0n×n In×n
4.2 Transforming Measurements and States
As specified in Chapter 2, geometric multiple target tracking has two sensor modes.
In sensor mode one, it is assumed that the measurements are expressed in and with respect
to the current tracking frame when given to G-MTT, and that the tracking frame can
move. If the tracking frame moves, then information on how to transform the measurements,
measurement covariances, state estimates, and error covariances from the previous tracking
frame to the current tracking frame must be provided to G-MTT. In this section we will
show how to transform the measurement covariances, state estimates and error covariances
provided that the state and measurement transformations are known.
Lemma 4.2.1. In this lemma we drop the dependency on time and assume that the state,
measurement, and error covariance are at the same time. Let T x : Gx → Gx denote the
transformation of the state from the previous tracking frame to the current tracking frame and
T si : Gsi → Gsi denote the transformation of a measurement produced by sensor si from the
previous tracking frame to the current tracking frame. Let Gx ∋ xa ∼ N (xa, Pa) denote the
state expressed in and with respect to the previous tracking frame with state estimate xa ∈ Gx
and error state xa ∼ N (0, Pa) ∈ Rx. Also let zsia ∈ Gsi denote a measurement from sensor si
expressed in and with respect to the previous tracking frame with corresponding measurement
61

noise Rsi ∋ rsia ∼ N (0, Rsia ). We suppose directly that the transformations T x and T si
are known, differentiable and that their derivatives are continuous, then the transformation
of the state estimate, error covariance, measurement and measurement covariance from the
previous tracking frame to the current tracking frame are
xb = T x (xa)
Pb =∂T x
∂x
∣∣∣∣xa
Pa∂T x
∂x
∣∣∣∣
⊤
xa
zsib = T si (zsia )
Rsib =
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
)
Rsia
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
)⊤
,
where xb, Pb, zsib and Rsi
b are the transformed state estimate, error covariance, measurement
and measurement covariance expressed in and with respect to the new tracking frame. ∂Tx
∂x
∣∣xa
denotes the partial derivative of T x with respect to the state and evaluated at xa,∂T si
∂z
∣∣zsia
denotes the partial derivative of T si with respect to the measurement and evaluated at zsia ,
and ∂hsi∂r
∣∣(xa,0)
denotes the partial derivative of the observation function with respect to the
measurement noise and evaluated at the state estimate xa and zero measurement noise as
defined in equation (4.5).
Proof. The transformations T x and T si can be an affine or a non-affine transformation. In
either case we affinize the transformation to preserve the Gaussian structure of the measure-
ment noise and uncertainty in the error state. We begin with the state. The affinization
of the state transform is done using the method in Subsection 3.4.5 by computing the first
order Taylor series. The first order Taylor series of the state transform is
xb = T x (xa)
≈ T x (xa) ExpGxI
(∂T x
∂x
∣∣∣∣xa
xa
)
,
where ∂Tx
∂x
∣∣xa
is calculated using equation (3.11). The transformed state estimate is xb =
T x (xa), and the transformed error state is xb = ∂Tx
∂x
∣∣xaxa. To calculate the transformed
62

error covariance, we calculate the covariance of xb, which is
cov (xb) = E[xbx
⊤b
]
= E
[(∂T x
∂x
∣∣∣∣xa
xa
)(∂T x
∂x
∣∣∣∣xa
xa
)⊤]
=∂T x
∂x
∣∣∣∣xa
E[xax
⊤a
] ∂T x
∂x
∣∣∣∣
⊤
xa
=∂T x
∂x
∣∣∣∣xa
Pa∂T x
∂x
∣∣∣∣
⊤
xa
To transform the measurement covariance we construct a new observation function
using the transform T si and the observation function defined in equation (4.1b) to get
zsib = T si (h (xa, rsia )) .
Using the process in Section 4.1 and method in Subsection 3.4.5 we affinize the new obser-
vation function to get
zsib ≈ T si (h (xa, 0)) ExpGsiI
(
∂T si
∂z
∣∣∣∣hsi (xa,0)
∂h
∂r
∣∣∣∣(xa,0)
rsia
)
,
Since the value of xa and h (xa, 0) are unknown, we approximate these values by
setting xa to xa and h (xa, 0) to zsia to get
zsib ≈ T si (zsia ) ExpGsiI
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
rsia
)
.
Thus, the transformed measurement noise covariance is
cov (rsib ) = E[
rsib (rsib )⊤]
= E
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
rsia
)(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
rsia
)⊤
=
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
)
Rsia
(
∂T si
∂z
∣∣∣∣zsia
∂hsi
∂r
∣∣∣∣(xa,0)
)⊤
63

4.3 Extending the Observation Function with State Transformations
In sensor mode two, the tracks’ state estimates and error covariances are transformed
from the tracking frame to each sensor frame to perform data association and to update
the tracks. This requires adding the transformation into the observation function. In this
section we drop the notation of time and assume that the measurements and states are at
the same time. Let T sit : Gx → Gx denote the state transform from the tracking frame to
the sensor frame of sensor si, zsisidenote a measurement from sensor si expressed in and with
respect to its corresponding sensor frame, Gx ∋ xt ∼ N (xt, Pt) denote the state expressed in
and with respect to the tracking frame with corresponding error state Rx ∋ xt ∼ N (0, Pt),
and let h : Gx×Rsi → Gsi be the observation function defined in equation (4.1b) that maps
the target’s state expressed in and with respect to the sensor frame of si to a measurement
expressed in and with respect to the sensor frame of si. The extended observation function
is
zsisi = hsi (T sit (xt) , rsi) . (4.10)
Using the chain rule and the method in Subsection 3.4.5, the affinized extended
observation function is
zsisi ≈ hsi (T sit (xt) , 0) ExpGsiI (Hsi
t xt + V sirsi) . (4.11)
where
Hsit =
∂hsi
∂x
∣∣∣∣(T si
t (xt),rsi)
∂T sit∂x
∣∣∣∣xt
(4.12)
V si =∂hsi
∂r
∣∣∣∣(xt,0)
, (4.13)
and the Jacobians ∂hsi∂x
and ∂hsi∂r
are defined in equation (4.5).
The rest of this dissertation is presented using the non-extended observation function,
and is easily adapted to the extended observation function by substituting in the definition
64

of the extended observation function and its Jacobians for the non-extended observation
function and its Jacobians.
65

CHAPTER 5. MEASUREMENT MANAGEMENT
In this chapter we will discuss how G-MTT organizes and manages measurements
from sensors. Measurements are stored in either a cluster if they have not been associated
to a track or a track’s consensus set if they have been associated to a track.
To understand the construction of clusters, we must analyze the behavior of constant-
velocity targets being tracked. For a moment, assume that a constant-velocity target in two
dimensional space is being observed by a sensor at a fixed rate, and that the sensor observes
the target’s position. As the target moves and time elapses, the target forms a continuous
trajectory, and the target-originated measurements should be close to the trajectory clustered
together and approximately equidistantly spread along the trajectory. This idea is illustrated
for three targets in Fig. 5.1. The targets’ trajectories are illustrated as the three arrowed
lines. The black dots represent non-target originated measurements. The red dots represent
measurements originated from the first target. The green dots represent measurements
originated from the second target. The orange dots represent measurements originated from
the third target. The fading of the measurement’s color is used to denote time where the
darker color indicates the more recent the measurements.
As illustrated in Fig. 5.1, measurements that are target originated are clustered to-
gether. Measurements from the same time and target are very close together. Measurement
from the same target and different times seem to have a fairly fixed space between them
related by the target’s velocity and the time interval between measurements. We leverage
the target-originated measurements’ relation in space and time by grouping them together
into a cluster.
A cluster is a grouping of neighboring measurements in space and time. An illustra-
tion of possible clusters pertaining to the scenario depicted in Fig. 5.1 is shown in Fig. 5.2.
This figure shows three different clusters. The first cluster C1 contains the measurements
66

Figure 5.1: A depiction of the trajectory of three targets being observed in two dimensional space.The target’s trajectory are illustrated as the three pointed lines. The black dots represent non-target originated measurements. The red dots represent measurements originated from the firsttarget. The green dots represent measurements originated from the second target. The orange dotsrepresent measurements originated from the third target. The fading of the measurement’s color isused to denote time where the darker color indicates the more recent the measurement.
from the first target (red dots) and a few false measurements (black dots). The second cluster
C2 contains the measurements from the second target (green dots) and a few false measure-
ments. The third cluster C3 contains the measurements from the third target (orange dots)
and a false measurement. We want to design the clusters so that ideally a cluster contains
all of the target-originated measurements from a single target and no false measurements.
We do this by defining a cluster using the three metrics: the cluster distance metric, the
cluster time metric, and the cluster velocity metric.
Let zsik,l ∈ Gsi denote the lth measurement from sensor si at the time tk, zsjk,c ∈ Gsj
denote the cth measurement from sensor sj at time tk, φssi: Gsi → Gs and φ
ssj
: Gsj → Gs
denote injective maps from the measurement space Gsi (Gsj respectively) to a common
measurement space Gs. The cluster distance metric between measurements from sensors si
and sj is denoted dsi,sjCD : Gsi ×Gsj → R and is defined as
dsi,sjCD
(zsik,l, z
sjk,c
) =∥∥∥LogGs
I
(
φssi(zsik,l)−1
φssj(zsjk,c
))∥∥∥ . (5.1)
where it maps each measurement from their respective measurement space to a common
measurement space. After being mapped to a common measurement space, the tangent
67

Figure 5.2: An illustration of possible clusters pertaining to the scenario depicted in Fig. 5.1.
vector associated with the geodesic that begins at φssi(zsik,l)and ends at φssj
(zsjk,c
)is computed
using the LogGsI map. The norm of this tangent vector is considered the distance between
the two points, which is consistent with measuring length on a Riemannian manifold.
The map φssi can be the identity map, a projection map, etc. As an example, suppose
that sensor si measures the position and velocity of the target and that sensor sj measures
only the target’s position. The map φsjsi would project the measurement zsik,l onto Gsj by
extracting the position. Now that both measurements are in a common measurement space,
we can calculate the distance between them. If the metric dsi,sjCD
(zsik,l, z
sjk,c
)exists, we say that
the measurement spaces si and sj are compatible. G-MTT assumes that all the measure-
ments spaces are compatible to ensure that target-originated measurements from different
sensors can be compared.
Let zsia,l denote the lth measurement from sensor si at time ta, and let zsjb,c denote the
cth measurement from sensor sj at time tb. We define the cluster time metric as
dCT(zsia,l, z
sjb,c
)= ∥ta:b∥ = ∥ta − tb∥ , (5.2)
which is the norm of the time interval between measurements. We define the cluster velocity
metric as
dsi,sjCV
(zsia,l, z
sjb,c
)=dsi,sjCD
(zsia,l, z
sjb,c
)
dCT(zsia,l, z
sjb,c
) , (5.3)
68

where we calculate the distance between the two measurements and divide by the time
interval between them to estimate the magnitude of the target’s velocity. The intuition
behind this metric is that a constant velocity target should produce measurements consistent
with the target’s velocity.
A non-track associated measurement zsik,l is associated with cluster Cm if there exists
a measurement zsjk,c ∈ Cm from the same time as zsik,l such that d
si,sjCD
(zsik,l, z
sjk,c
)≤ τCD, or
if there exists a measurement zsjb,c from a different time such that dCT
(zsik,l, z
sjb,c
)≤ τCT and
dsi,sjCV
(zsik,l, z
sjb,c
)≤ τCV . The constraint on the time interval is necessary to ensure that
measurements far apart in distance and time are not associated with each other; otherwise,
all the measurements would be in one big cluster.
To keep the memory storage requirements feasible, at the beginning of the data
management phase discussed in Section 2.2, G-MTT removes measurements from clusters
and consensus sets that have a time stamp before the sliding time window TW . In addition,
during the track initialization phase, measurements used to initialize a new track are removed
from the cluster. After this phase G-MTT checks all of the clusters to see if there exists
a measurement in each cluster with a time stamp within the threshold TCT of the current
time. If such a measurement is not found within the cluster, the entire cluster is removed.
It is removed because no new measurement will be associated to the cluster and it does not
contain measurements that G-MTT can use to initialize new tracks. If it did, G-MTT would
have already initialized a track from the cluster.
69

CHAPTER 6. LIE GROUP INTEGRATED PROBABILISTIC DATA AS-SOCIATION FILTER
When tracking a single target whose initial position is unknown using a sensor, the
sensor produces non-target-originated measurements (i.e. false measurements or clutter). In
the presence of dense clutter, it is a challenge to locate and track the target since it is difficult
to distinguish between target-originated measurements and false measurements. The typical
approach to tracking the target is to use new measurements to either improve the estimate
of an existing track (a track is a representation of the target which consists of at least the
state estimate) or initialize new tracks. If the clutter density is high, numerous tracks that
do not represent the target are initialized from clutter.
An example scenario illustrating the challenge of tracking in clutter is depicted in
Fig. 6.1 where the black dots represent measurements, the green car represents the true tar-
get, and the blue cars represent the tracks currently in memory. The left image represents a
time step when measurements are received for the first time. The right image represents a
subsequent time step when previous measurements are used to initialize new tracks and addi-
tional measurements are received. A challenge to solve is identifying which track represents
the target.
Identifying which track best represents the target requires the additional statistical
measure called the track likelihood . Tracks with a low track likelihood are rejected and pruned
from memory, and tracks with a high track likelihood are confirmed and are candidates to
represent the target. The confirmed track with the highest track likelihood is used as the
best estimate of the target.
Different approaches to calculating the track likelihood depend on the data association
algorithm. Data association is the process of assigning new measurements to existing tracks
or a cluster so that the track-associated measurement can be used to improve the estimates
of the tracks. There are two types of data association: hard data association and soft data
70

Figure 6.1: A depiction of the challenge of identifying which track represents the target. The blackdots represents measurements, the green car represents the target, and the blue cars representtracks. The left image represents the first time step when measurements are received for the firsttime. The right image represents a subsequent time step when previous measurements are used toinitialize new tracks and additional measurements are received.
association. Hard data association assigns at most one new measurement to each track, and
soft data association can assign multiple new measurements to each track.
Tracking algorithms that use hard data association, such as the Nearest Neighbor
filter (NNF) [42], the Global Nearest Neighbor filter (GNNF) [43], [44] and track splitting
algorithms, commonly use the likelihood function or the negative log likelihood function
(NLLF) to determine if a track should be rejected [74]. The likelihood function measures the
joint probability density of all of the measurements associated with a track. If the track’s
likelihood function falls below some threshold, the track is rejected. This approach does
not indicate which track best represents the target, only which tracks should be removed;
however, it is common to assume that the track with the highest likelihood best represents
the target.
Another approach to quantify the track likelihood when using hard data association
is based on the sequential probability ratio test (SPRT) [85]. The SPRT uses a sequence
of data to either confirm a null hypothesis or reject the alternate hypothesis by analyzing
the probability ratio of the two hypotheses. In terms of tracking, the SPRT calculates the
joint probability density of the measurements associated to a track for the hypothesis that
all the measurements are target originated and for the hypothesis that all the measurements
are false. It then takes the ratio of the two probability densities and rejects the track if the
ratio is below a threshold, confirms the track if the ratio is above a threshold, or continues to
gather more information as new measurements are received until the track can be confirmed
71

or rejected [86]. The SPRT is used in a variety of tracking algorithms including the Multiple
Hypothesis Tracker (MHT) [48].
The two aforementioned methods of quantifying the track likelihood do not work
for soft data association algorithms, and therefore does not work with the probabilistic
data association filter (PDAF) [45], [46]. For this reason, the PDAF was extended in [47]
to calculate the track likelihood using a novel approach called the Integrated Probabilistic
Data Association Filter (IPDAF).
A nice feature of the IPDAF is that it can be used with many different types of system
models including system models defined on Lie groups. To our knowledge, the IPDAF has not
been adapted to Lie groups; however, the joint integrated probabilistic data association filter
(JIPDAF) was adapted to the Lie group SE (2) in [37]. The JIPDAF is the adaptation of the
IPDAF to tracking multiple targets. When tracking only a single target, the JIPDAF reduces
to the IPDAF. However, the reduction would require understanding the more complicated
JIPDAF instead of the simpler IPDAF. Since the main focus of [37] was not the adaptation
of the JIPDAF to general Lie groups, the algorithm was not derived and explained in detail.
The purpose of this chapter is to present the IPDAF adapted to geodesically complete,
unimodular Lie groups. We refer to the resulting algorithm as the Lie group integrated
probabilistic data association filter (LG-IPDAF).
The rest of this chapter is outlined as follows. In Section 6.1 we provide a brief
overview of the LG-IPDAF algorithm. In Sections 6.2 and 6.4 we present the prediction
and update steps of the LG-IPDAF. In Section 6.3 we present the track data association
algorithm. In Section 6.5 we present experimental results, and finally conclude this chapter
in Section 6.6.
6.1 Overview
The LG-IPDAF is used by G-MTT in the data management phase to associate new
measurements to tracks, propagate tracks, and update tracks with associated measurements
as discussed in Section 2.2. The LG-IPDAF is designed to track a single target using a
single sensor in the presence of clutter. However, it can be easily adapted to work with
multiple targets and multiple sensors. We will discuss this adaptation at different points in
72

the chapter, and proceed under the assumption that we are tracking a single target using a
single sensor unless otherwise mentioned.
At this time we introduce and review notation. Let zk,j denote the jth track-associated
measurement at time tk, and mk denote the number of track-associated measurements at
time tk. The set of measurements associated to the track at time tk is denoted Zk =
zk,jmk
j=1. The cumulative set of track-associated measurements from the initial time to time
tk is denoted Z0:k = Zℓkℓ=0. Note that we have dropped the superscript identifying the
corresponding sensor since we assume a single sensor in this chapter. We denote the Lie
group and corresponding Cartesian algebraic space of the measurements as Gs and Rs.
Let ϵ denote a Bernoulli random variable that represents the probability that the
track represents the target. We refer to the probability that the track represents a target
conditioned on Z0:k as the track likelihood and denote it as p (ϵk | Z0:k). Conversely, we
denote the probability that the track does not represent a target conditioned on Z0:k as
p (ϵk = F | Z0:k) = 1− p (ϵk | Z0:k).
The LG-IPDAF propagates and updates the tracks as time progresses and new mea-
surements are received. This means that the state estimates, error covariances, and track
likelihoods change as they are propagated and updated. Let tk− denote the time previous to
tk. The state estimate and error covariance at time tk− conditioned on track representing a
target and the measurements Z0:k− are denoted xk−|k− and Pk−|k− , and the track likelihood
at time tk− conditioned on the measurements Z0:k− is denoted ϵk−|k− . The first subscript
indicates the time, and the second subscript indicates the measurements the random variable
is conditioned on.
We denote and define the probability of the track’s state conditioned on the previous
track-associated measurements and it representing a target as
p (xk | ϵk, Z0:k−) = η exp
(
−1
2x⊤k|k−P
−1k|k− xk|k−
)
, (6.1)
where xk|k− = LogGxI
(
x−1k|k−xk
)
is the error state, xk|k− is the state estimate and Pk|k− is the
error covariance at time tk conditioned on the measurements Z0:k− .
73

When new measurements are received, the LG-IPADF algorithm performs three steps:
the prediction step, the data association step, and the update step. We describe these steps
for a single initialized track. During the prediction step the track’s state estimate, error
covariance and track likelihood are propagated forward in time using the process described
in Section 6.2. A track’s propagated state estimate, error covariance and track likelihood are
denoted xk|k− , Pk|k− , and ϵk|k− respectively. During the data association step, new measure-
ments are either associated to a track or given to a cluster as described in Section 6.3. The
track associated measurements are denoted zk,jmk
j=1. The data association step is discussed
in detail in Section 6.3. During the update step, the track’s state estimate xk|k− is copied
for every associated measurement and updated using a distinct associated measurement to
produced the split state estimatesxk|k,j
mk
j=0, where xk|k,j is the state estimate after being
updated with measurement zk,j and xk|k,j=0 = xk|k− is the null hypothesis that none of the
measurements originated from the target. The split state estimatesxk|k,j
mk
j=0are then fused
together according to their probability of being the correct state estimate. This way, the
LG-IPDAF is never totally correct but never completely wrong as in the case of hard data
association algorithms. The update step is described in detail in Section 6.4. A depiction of
a single iteration of the LG-IPDAF is shown in Fig. 6.2.
The LG-IPDAF makes the following assumptions:
6.1. There exists a single target that can be observed by a single sensor and modeled by a
constant-velocity, white-noise driven target model defined in equation (4.1).
6.2. A sensor scan occurs whenever the sensor observes the measurement space. At every
sensor scan there are mk validated measurements denoted zk,jmk
j=1 = Zk.
6.3. At every scan there is at most one target originated measurement and all others are
false (i.e. non target-originated measurements).
6.4. The senor detects the target with probability PD ∈ [0, 1].
6.5. The target originated measurement falls within the track’s validation region with prob-
ability PG provided that the track represents the target. The probability PG is discussed
in Section 6.3.
74

Figure 6.2: A depiction of a single iteration of the LG-IPDAF. The large green car representsthe target, the smaller blue cars represent the tracks, the black dots represent measurements,the gray ellipse represents the validation region and the small red cars represent the split stateestimates. The top left image depicts the prediction and data association steps during which newmeasurements are received, the track is propagated in time, the validation region is constructed,and four measurements are associated to the track. The top right image shows the first part of theupdate step where the state estimate is split into five states; one for each associated measurementand one for the null hypothesis that none of the measurements are target originated. The bottomleft shows the rest of the update step where the split state estimates are fused together to form asingle state estimate. The bottom right image shows the last step which initializes new tracks fromnon-track-associated measurements.
6.6. The false measurements are independently identically distributed (iid) with uniform
spatial density λ.
6.7. The expected number of false measurements per sensor scan is modeled using the
density function µF . In this chapter, µF denotes a Poisson distribution defined as
µF (ϕ) = expλVk(λVk)ϕϕ!
, (6.2)
where Vk is the volume of the validation region defined in Section 6.3, λVk is the
expected number of false measurements, and ϕ is the number of false measurements.
6.8. The past information about a track is summarized as(xk−|k− , Pk−|k− , ϵk−|k−
)where
xk−|k− , Pk−|k− , and ϵk−|k− denote the track’s state estimate, error covariance and track
75

likelihood at time previous time and conditioned on the previous track-associated mea-
surements.
6.2 Prediction Step
The prediction step of the LG-IPADF is similar to the prediction step of the indirect
Kalman filter with the addition of propagating the track likelihood [79], [84].
To derive the prediction step, we need to construct the Gaussian approximation of
the probability of the track’s current state conditioned on the track’s previous state, the
track representing the target and the previous measurements denoted p (xk | xk− , ϵk− , Z0:k−).
Lemma 6.2.1. We suppose directly Assumptions 6.1. and 6.8. and that the target’s state
evolves according to the state transition function defined in equation (4.2), then the Gaussian
approximation of p (xk | xk− , ϵk− , Z0:k−) is
p (xk | xk− , ϵk− , Z0:k−) ≈ η exp
(
−1
2
(xk|k− − Fk−:kxk−|k−
)⊤Qk−:k
(xk|k− − Fk−:kxk−|k−
))
,
(6.3)
where
xk|k− = LogGxI
(
x−1k|k−xk
)
, (6.4)
xk|k− = f(xk−|k− , 0, tk−:k
)(6.5)
Qk−:k = Gk−:kQ (tk−:k)G⊤k−:k, (6.6)
f is the state transition function defined in equation (4.2), and the Jacobians Fk−:k and Gk−:k
are defined in equation (4.5) and evaluated at the point ζfk−:k=(xk−|k− , 0, tk−:k
).
Proof. The probability p (xk | xk− , ϵk− , Z0:k−) is approximated as Gaussian using the affinized
system defined in (4.6) and computing the first and second moments of the propagated error
76

state. From equation (4.6) the affinized state transition function is
xk|k− ≈ f(xk−|k− , 0, tk−:k
)
︸ ︷︷ ︸
xk|k−
ExpGxI
Fk−:kxk−|k− +Gk−:kqk−:k︸ ︷︷ ︸
xk|k−
, (6.7)
where xk|k− , xk|k− = f(xk−|k− , 0, tk−:k
), xk|k− = Fk−:kxk−|k− + Gk−:kqk are respectively the
predicted state, predicted state estimate and predicted error state all conditioned on the
previous measurements and the track’s previous state.
Since the probability p (xk | xk− , ϵk− , Z0:k−) is conditioned on a specific value of the
previous state, the previous error state xk−|k− is not a random variable; thus, the first and
second moments of the propagated error state are
E[xk|k−
]= E
[Fk−:kxk−|k− +Gk−:kqk−:k
]
= Fk−:kxk−|k− ,
cov[xk|k−
]= Gk−:kQ (tk−:k)G
⊤k−:k = Qk−:k,
and the approximate Gaussian PDF is given in equation (6.3).
Lemma 6.2.2. We suppose the following: 1) the probability of the track’s previous state
conditioned on the track representing the target and previous measurements is known as
stated by Assumption 6.8.. We denote and define this probability as
p (xk− | ϵk− , Z0:k−) = η exp
(
−1
2x⊤k−|k−P
−1k−|k− xk−|k−
)
, (6.8)
where xk−|k− = LogGxI
(
x−1k−|k−xk−
)
. 2) The target’s state evolves according to the state
transition function defined in equation (4.2) as stated by Assumption 6.1.. 3) The probability
p (xk | xk− , ϵk− , Z0:k−) is known and defined in Lemma 6.2.1. Then the propagation of the
track’s state estimate and error covariance are
xk|k− = f(xk−|k− , 0, tk−:k
), (6.9a)
Pk|k− = Fk−:kPk−|k−F⊤k−:k +Gk−:kQ (tk−:k)G
⊤k−:k (6.9b)
77

and the probability of the track’s current state conditioned on the track representing the target
and the previous measurements is
p (xk | ϵk− , Z0:k−) = η
(
−1
2x⊤k|k−P
−1k|k− xk|k−
)
(6.10)
where xk|k− = LogGxI
(
x−1k|k−xk
)
, xk−|k− and Pk−|k− denote the error state, state estimate and
error covariance at time tk− conditioned on the measurements Z0:k−, and the Jacobians Fk−:k
and Gk−:k are defined in (4.5) evaluated at the point ζfk−:k=(xk−|k− , 0, tk−:k
).
The proof of Lemma 6.2.2 is given in Appendix A.1.
The track likelihood is modeled using a Markov process as described in [47], and its
propagation is
p (ϵk | Z0:k−) = σ (tk−:k) p (ϵk− | Z0:k−) ,
where the probability σ (tk−:k) ∈ [0, 1] is chosen to represent how the track likelihood can
change in time due the target being occluded, leaving the sensor surveillance region, etc.
6.3 Data Association
In this section we derive the data association algorithm that associates new measure-
ments to tracks. Let ψ denote a Bernoulli random variable that the measurement originated
from the target. The estimated measurement of a track with state estimate xk|k− is
zk ≜ h(xk|k− , 0
), (6.11)
where h is the generic observation function defined in equation (4.1).
The validation region is a volume in measurement space centered around the track’s
estimated measurement. The volume is selected such that a target-originated measurement
has probability PG to fall within the track’s validation region provided that the track repre-
sents the target. A measurement that falls within the validation region of a track is called a
validated measurement and is associated to the track; otherwise, the measurement is given
78

to a cluster as discussed in Chapter 5. Computation of the validation region is complicated
by the fact that the measurements and the target’s state are elements of Lie groups and do
not have a vector space structure that the traditional validation region is defined on.
Lemma 6.3.1. Let zk be an arbitrary measurement and let ψ be a Bernoulli random vari-
able that indicates that the measurement is target-originated. We suppose directly that a
target-originated measurement is related to the target’s state according to the observation
function defined in equation (4.1b), then the Gaussian approximation of the probability of
the measurement zk provided that it is target-originated and conditioned on the track’s state,
the track representing the target and the previous measurements is denoted and defined as
p (zk | ψ, xk, ϵk− , Z0:k−) ≈ η exp
(
−1
2
(zk −Hkxk|k−
)⊤Rk
(zk −Hkxk|k−
))
, (6.12)
where
zk = LogGsI
(z−1k zk
)(6.13)
zk = h(xk|k− , 0
)(6.14)
Rk = VkRV⊤k , (6.15)
xk = xk|k−ExpGxI
(xk|k−
), h is the observation function defined in equation (4.1b), R is the
measurement noise covariance, and the Jacobians Hk and Vk are defined in equation (4.5)
and evaluated at the point ζkk =(xk|k− , 0
).
The proof of Lemma 6.3.1 is similar to the provided proof of Lemma 6.2.1 and will
not be given.
Lemma 6.3.2. We suppose directly that the probabilities p (zk | ψ, xk, ϵk− , Z0:k−) defined in
equation (6.12) and p (xk | ϵk− , Z0:k−) defined in equation (6.10) are known, and that a target
originate measurement zk is related to the target’s state by the observation function defined
in equation (4.1), then the Gaussian approximation of the probability of the measurement zk
conditioned on the previous measurements and it being target-originated is
p (zk | ψ, ϵk− , Z0:k−) ≈ η exp
(
−1
2ν⊤k S
−1k νk
)
(6.16)
79

where
zk = h(xk|k− , 0
)(6.17a)
νk = LogGsI
(z−1k zk
), (6.17b)
Sk = VkRV⊤k +HkPk|k−H
⊤k , (6.17c)
zk is the estimated measurement, xk|k− is the state estimate conditioned on the previous
measurements, R is the measurement noise covariance, Pk|k− is the track’s error covari-
ance conditioned on the previous measurements, Sk is the innovation covariance, and the
Jacobians Hk and Vk are defined in (4.5) and evaluated at the point ζhk =(xk|k− , 0
).
The proof of Lemma 6.3.2 is similar to the proof of Lemma 6.2.2 found in Ap-
pendix A.1 and will not be provided. There are similar equations to equation 6.17b through-
out this dissertation. This equation finds the tangent vector corresponding to the geodesic
that starts at zk and ends at zk where zk is the estimated measurement. We find the tangent
vector in order to calculate the probability of the measurement zk since Gaussian distri-
butions are defined on the tangent space, and p (zk | ψ, ϵk− , Z0:k−) = p (νk | ψ, ϵk− , Z0:k−) as
discussed in Subsection 3.4.6.
Using equations (6.16) and (6.17), we define the metric dV : Gs ×Gs → R as
dV (zk, zk) = ν⊤k S−1k νk, (6.18)
where the innovation covariance is used to normalize the metric; thus, the metric dV is the
sum of m squared Gaussian random variables where m is the dimension of the measurement
space, and the values of the metric are distributed according to a chi-square distribution
with m degrees of freedom.
The validation region is defined as the set
val (zk, τG) = z ∈ Gs | dV (z, zk) ≤ τG ,
where the parameter τG is called the gate threshold.
80

Following standard procedure with the Kalman filter, the volume of the validation
region is defined as
Vk = cm |τGSk|1/2 , (6.19)
where cm is the volume of the unit hypersphere of dimension m calculated as
cm =πm/2
Γ (m/2 + 1)
with Γ denoting the gamma function [74]. It is worth noting that the volume of the validation
region is dependent on the error covariance through the innovation covariance Sk. Therefore,
the validation region contains information on the quality of the state estimate. This concept
will be used in Section 6.4.
The gate probability is
PG =
∫
Vk
p (zk | ψ, xk, ϵk, Z0:k−) , (6.20)
and is the value of the chi-square cumulative distribution function (CDF) with parameter
τG [74].
Let θk denote a Bernoulli random variable that the measurement is target originated
and inside the validation region. Using (6.16) and (6.20), the probability of a measurement,
conditioned on the measurement being inside the validation region and target-originated, on
the track representing the target and the previous measurements is
p (zk | θk, ϵk, Z0:k−) = P−1G p (zk | ψ, ϵk, Z0:k−) . (6.21)
The data association step of the LG-IPDAF can be extended to multiple targets and
tracks by assigning a measurement to every track whose validation region the measurement
falls in without taking into account joint associations. This is done by copying the mea-
surement for every track it is associated with and giving each track the measurement is
associated with a copy of the measurement, and treating track associated measurements of
one track independently of track associated measurements of another track.
81

6.4 Update Step
The LG-IPDAF assumes that at most one measurement originates from the target
every sensor scan; thus, given the set of new validated measurements, Zk = zk,jmk
j=1, either
one of the measurements is target originated or none of them are. This leads to different
possibilities. As an example, all of the measurements could be false, the measurement zk,1
could be the target-originated measurement and all others false, zk,2 could be the target-
originated measurement and all other false, etc. These different possibilities are referred to
as association events denoted θk,j where the subscript j > 0 means that the jth validated
measurement is target originated and all others are false, and where j = 0 means that all of
the validated measurements are false. Hence, there are a total of mk + 1 association events.
Lemma 6.4.1. We suppose directly Assumptions 6.1.-6.8. and that Zk = zk,jmk
j=1 is the
set of validated measurements at time tk, then the probability of an association event θk,j
conditioned on the measurements Z0:k and the track representing a target, denoted βk,j ≜
p (θk,j | ϵk, Z0:k), is
βk,j =
Lk,j
1−PDPG+∑mk
i=1 Lk,ij = 1, . . . ,mk
(1−PGPD)
1−PDPG+∑mk
j=i Lk,ij = 0,
(6.22)
where
Lk,j =PDλp (zk,j | ψ, ϵk, Z0:k−) , (6.23)
and p (zk,j | ψ, ϵk, Z0:k−) is defined in equations (6.16) and (6.17).
The proof of Lemma 6.4.1 is in Appendix A.2.
Using the association events, we can update the track’s state estimate and error
covariance conditioned on each association event in order to generate the split tracks. This
update step is similar to the Kalman filter’s update step. The Kalman filter algorithm
updates the state estimate directly using vector space arithmetic; however, since not every
Lie group has a vector space structure, we have to approach the update step differently.
Recall that p (xk | ϵk, Z0:k−) = p (xk | ϵk, Z0:k−) with the relation xk =
xk|k−ExpGxI
(xk|k−
). The error state xk|k− ∼ N
(µk|k− , Pk|k−
)has a vector space structure.
This allows us to update the error state using the a method similar to the Kalman filter. We
82

denote the updated error state and its corresponding mean and error covariance conditioned
on θk,j as x−k|k,j ∼ N(
µ−k|k,j, P
c−
k|k,j
)
. Using the updated error state, the probability of the
track’s state conditioned on the association event θk,j, it representing the target and all the
track associated measurements is p (xk | θk,j, ϵk, Z0:k) = p(x−k | θk,j, ϵk, Z0:k
)with the relation
xk = xk|k−ExpGxI
(
x−k|k
)
.
The updated error state may have a non-zero mean. To reset the error state’s mean
µ−k|k,j to zero we add it to the state estimate xk|k− via the exponential map, and the error
covariance is modified accordingly. We denote the updated and reset error state and its cor-
responding mean and error covariance conditioned on θk,j as xk|k,j ∼ N(
µk|k,j = 0, P ck|k,j
)
.
Using the reset error state, we have p (xk | θk,j, ϵk, Z0:k) = p (xk | θk,j, ϵk, Z0:k) with the rela-
tion xk = xk|kExpGxI
(xk|k). In summary, we update the mean of the error state, and then
reset it to zero by adding it onto the state estimate. This process is the update step of the
indirect Kalman filter and is presented in the following lemma.
Lemma 6.4.2. We suppose directly the following: 1) the Assumptions 6.1.,6.3. and 6.8.. 2)
the probability p (xk | ϵk, Z0:k−) is known and defined in equation (6.10). 3) Zk = zk,jmk
j=1 is
the set of validated measurements at time tk, and 4) the probability p (zk,j | θk,j, xk, ϵk, Z0:k−)
is known and defined in equation (A.9), then the update of the track’s state estimate xk|k−
and error covariance Pk|k− conditioned on the association event θk,j, the measurements Z0:k,
and the track representing the target and provided that j > 0 is
xk|k,j = xk|k−ExpGxI
(
µ−k|k,j
)
(6.24)
P ck|k,j = JGx
r
(
µ−k|k,j
)
P c−
k|kJGxr
(
µ−k|k,j
)⊤
, (6.25)
where
µ−k|k,j = Kkνk,j (6.26a)
νk,j = LogGsI
(
h(xk|k− , 0
)−1zk,j
)
(6.26b)
Kk = Pk|k−H⊤k S
−1k (6.26c)
Sk = HkPk|k−H⊤k + VkRV
⊤k (6.26d)
83

P c−
k|k = (I −KkHk)Pk|k− (6.26e)
and the Jacobians Hk and Vk are defined in (4.5) and evaluated at the point ζhk =(xk|k− , 0
).
Otherwise, j = 0 and
xk|k,j=0 = xk|k− (6.27a)
Pk|k,j=0 = Pk|k− , (6.27b)
since θk,j=0 indicates that all measurements are false; thus, no additional information about
the target was gathered. Equation (6.26a) is the updated mean of the error state before
being reset to zero, equation (6.26b) is the innovation term, equation (6.26c) is the Kalman
gain, equation (6.26d) is the innovation covariance, and equation (6.26e) is the updated error
covariance before the updated mean is reset. Equation (6.24) adds the mean of the error state
to the state estimate essentially resetting the error state’s mean to zero, and equation (6.25)
is the covariance update as a consequence to resetting the error state’s mean to zero.
It follows directly that the Gaussian approximation of the probability of the split track
xk,j conditioned on the track representing the target, the association event θk,j and the mea-
surements Z0:k is
p (xk,j | θk,j, ϵk, Z0:k) = η exp(
x⊤k|k,j(P ck|k
)−1xk|k,j
)
, (6.28)
where xk|k,j = LogGxI
(
x−1k|k,jxk,j
)
.
The proof of Lemma 6.4.2 is in Appendix A.3.
Using the probabilities of the split tracks defined in equation (6.28) and the probabil-
ities of each association event defined in equation (6.22), the probability of the track’s state
conditioned on it representing the target and all track-associated measurements is calculated
using the theorem of total probability
p (xk | ϵk, Z0:k) =
mk∑
j=0
p (xk,j | θk,j, ϵk, Z0:k) βk,j. (6.29)
84

In essence, the probability of the track’s state is the weighted average of the split track’s
state probabilities where the weight is the probability of the corresponding association event.
The process of splitting tracks could be repeated every time new measurements are received
which would lead to an exponential growth of split tracks. This process would quickly
become computationally and memory expensive. To keep the problem manageable, the split
tracks are fused together using the smoothing property of conditional expectations discussed
in [87].
Normally if the track’s state estimate was expressed in Euclidean space, the validated
measurements would be used to calculate the updated state estimates xk|k,j, and then the
state estimates would be be fused together according to the equation
xk|k =
mk∑
j=0
xk|k,jβk,j. (6.30)
However, this approach does not work with arbitrary Lie groups since not every Lie group
has a vector space structure. Instead we have to solve equation (6.29) indirectly by pos-
ing the problem in the Cartesian algebraic space. This is done by using the relation in
equation (3.14a) to note that
p (xk,j | ϵk, Z0:k) = p(x−k,j | ϵk, Z0:k
), (6.31)
where x−k,j is the error state conditioned on θk,j after update but before its mean is reset to
zero as discussed in Lemma 6.4.2. We use this version of the error state since we can fuse
the means µ−k|k,j, defined in equation (6.26a), together in a similar way as in equation (6.30).
Using the relation in equation (6.31), an equivalent expression to equation (6.29) is
p(
x−k|k | ϵk)
=
mk∑
j=0
p(
x−k|k,j | θk,j, ϵk)
βk,j. (6.32)
In essence, the validated measurements are used to update the mean of the error state
for each split track µ−k|k,j according to Lemma 6.4.2. Since the means are elements of the
Cartesian algebraic space (in the same tangent space), they can be added together using a
85

Figure 6.3: The error state means for each split track before reset µ−k|k,j are fused together using
the association event probabilities βk,j in the tangent space to form the error state mean µ−k|k. The
mean is then used to update the track’s state estimate from xk|k− to xk|k.
weighted average to form a single mean µ−k|k. The mean of the error state is then reset to
zero by adding µ−k|k onto the state estimate xk|k− using the exponential map. This process
is depicted in Fig. 6.3.
Using the smoothing property of conditional expectations, the expected value of the
error state x−k|k is
E[
x−k|k
]
= E[
E[
x−k|k,j|θk,j, ϵk]]
(6.33a)
=
mk∑
j=0
E[
x−k|k,j|θk,j, ϵk]
βk,j (6.33b)
=
mk∑
j=0
µ−k|k,jβk,j (6.33c)
= µ−k|k (6.33d)
where βk,j is defined in Lemma 6.4.1 and µ−k|k,j is defined in Lemma 6.4.2.
86

Using the updated mean of the error state, the covariance is
cov[
x−k|k
]
= E
[(
x−k|k − µ−k|k
)(
x−k|k − µ−k|k
)⊤]
.
From this point the derivation follows from [74] and results in
P−k|k = βk,0Pk|k− + (1− βk,0)P
c−
k|k + Pk|k
where
P c−
k|k = (I −KkHk)Pk|k− (6.34a)
Kk = Pk|k−H⊤k S
−1k (6.34b)
Sk = HkPk|k−H⊤k + VkRV
⊤k (6.34c)
Pk|k = Kk
(mk∑
j=1
βk,jνk,jν⊤k,j − νkν
⊤k
)
K⊤k (6.34d)
νk,j = LogGsI
(
h(xk|k− , 0
)−1zk,j
)
(6.34e)
νk =
mk∑
j=1
βk,jνk,j (6.34f)
µ−k|k = Kkνk, (6.34g)
Pk|k− is the error covariance before the update step, P c−
k|k is the error covariance of the error
state x−k|k,j derived in Lemma 6.4.2, Pk|k is the covariance that captures the “spread of
the means”, and the Jacobians Hk and Vk are defined in (4.5) and evaluated at the point
ζhk =(xk|k− , 0
).
To reset the error state’s mean to zero, the mean µ−k|k is added onto the state estimate
xk|k− by forming a geodesic from xk|k− to xk|k in the direction of µ−k|k as depicted in Fig 6.3.
To derive this process, let x−k|k = µ−k|k+ak|k where ak|k ∼ N
(
0, P c−k|k
)
contains the uncertainty
in the error state, then under the assumption that ak|k is small and using the property of
87

the right Jacobian defined in equation (3.7) we add µ−k|k onto xk|k− as follows:
xk|k = xk|k−ExpGxI
(
µ−k|k + ak|k
)
(6.35a)
≈ xk|k−ExpGxI
(
µ−k|k
)
︸ ︷︷ ︸
xk|k
ExpGxI
JGxr
(
µ−k|k
)
ak|k︸ ︷︷ ︸
xk|k
, (6.35b)
where xk|k = xk|k−ExpGxI
(
µ−k|k
)
is the updated state estimate, and xk|k = JGxr
(
µ−k|k
)
ak|k is
the updated and reset error state.
The error covariance of the error state xk|k is
cov(xk|k)= cov
(
JGxr
(
µ−k|k
)
ak|k
)
= JGxr
(
µ−k|k
)
cov(ak|k)JGxr
(
µ−k|k
)⊤
= JGxr
(
µ−k|k
)
P−k|kJ
Gxr
(
µ−k|k
)⊤
= Pk|k;
therefore, xk|k ∼ N(µk|k = 0, Pk|k
).
Lemma 6.4.3. We suppose directly Assumptions 6.1.-6.8., and that Zk is the set of validated
measurements, then the update for the track likelihood is
p (ϵk | Z0:k) =1− αk
1− αkp (ϵk | Z0:k−)p (ϵk | Z0:k−) , (6.36)
where
αk =
PDPG if mk = 0
PDPG −∑mk
j=1 Lk,j else.
. (6.37)
and Lk,j is defined in equation (6.23).
The proof of Lemma 6.4.3 is in Appendix A.4.
Using the track likelihood, a track is either rejected after the update step if the track
likelihood is below the threshold τRT , confirmed to represent a target if the track likelihood is
88

above the threshold τCT , or neither rejected nor confirmed until more information is gathered
with new measurements. In the case of tracking a single target, the track with the best track
likelihood is assumed to represent the target. In the case of tracking multiple targets, every
confirmed track is assumed to represent the target.
6.4.1 Summary
Theorem 6.4.1. Given Assumptions 6.1.-6.8., let Zk = zk,jmk
j=1 denote the set of mk
validated measurements at time k and xk|k−, Pk|k− and p (ϵk | Z0:k−) denote the track’s state
estimate, error covariance and track likelihood at time tk and conditioned on the previous
measurements, then the track’s updated state estimate, error covariance and track likelihood
are
xk|k = xk|k−ExpGxI
(
µ−k|k
)
(6.38)
Pk|k = JGxr
(
µ−k|k
)
P−k|kJ
Gxr
(
µ−k|k
)⊤
(6.39)
p (ϵk | Z0:k) =1− αk
1− αkp (ϵk | Z0:k−)p (ϵk | Z0:k−) (6.40)
where
µ−k|k = Kkνk (6.41a)
νk =
mk∑
j=1
βk,jνk,j (6.41b)
νk,j = LogGsI
(
h(xk|k− , 0
)−1zk,j
)
(6.41c)
Kk = Pk|k−H⊤k S
−1k (6.41d)
Sk = HkPk|k−H⊤k + VkRV
⊤k (6.41e)
P c−
k|k = (I −KkHk)Pk|k− (6.41f)
Pk|k = Kk
(mk∑
j=1
βk,jνk,jν⊤k,j − νkν
⊤k
)
K⊤k (6.41g)
P−k|k = βk,0Pk|k− + (1− βk,0)P
c−
k|k + Pk|k, (6.41h)
89

βk,j is defined in equation (6.22), αk is defined in equation (6.37), νk,j denotes the innovation
term, Sk the innovation covariance, Kk the Kalman gain, P c−
k|k the error covariance after
update but before reset, Pk|k the covariance associated with the spread of the innovation
terms, R the measurement noise covariance, h the observation function, and Hk and Vk are
the Jacobians defined in (4.5) and evaluated at the point ζhk =(xk|k− , 0
).
The proof of the theorem follows directly from Lemmas 4.1.1, 6.3.2, 6.4.1, 6.4.2, and
6.4.3
6.5 Experiment and Results
We demonstrate the LG-IPDAF in simulation by tracking a car restricted to a flat
ground plane. This restriction allows us to model the car using the Lie group SE (2). For
a description of the Lie group SE (2) see Appendix C.4. In the simulation we assume
that the target’s pose is observable by the sensor with measurement noise covariance R =
diag (1e−1, 1e−1, 1e−2) and a surveillance region of 140 by 140 meters. The observation
function for this experiment is
zk = h (xk, rk) (6.42)
= gkExpSE(2)I (rk) , (6.43)
where xk = (gk, vk) ∈ Gx= SE (2)×RSE(2) is the target’s state, rk ∼ N (0, R) ∈ RSE(2) is
the measurement noise, and zk ∈ GSE(2) is the measurement. The complete system model is
defined by equations (4.1), (4.2), and (6.42).
The Jacobians of the observation function evaluated at the point ζhk = (xk, 0) are
Hk=∂h
∂x
∣∣∣∣ζhk
= I (6.44)
Vk=∂h
∂r
∣∣∣∣ζhk
= I. (6.45)
The derivation of these Jacobians are easily derived using the method in Section 4.1. The
Jacobians of the state transition function are derived in Section 4.1.
90

In the experiment, the car is given three trajectories: a circular trajectory with a 10
meter radius, a meandering trajectory consisting of curvy and straight lines, and a straight
trajectory. In the first two trajectories the car is given a translational velocity of 10 meters
per seconds which is about 22 mile per hour. In the third trajectory the car is given a
translational velocity of 7 meters per second.
We set the following LG-IPDAF parameters: the spatial density of false measure-
ments to λ = 0.01 implying that there are 196 false measurements every sensor scan, the
car’s probability of detection to PD = 0.9, gate probability to PG = 0.9, track likelihood
confirmation threshold to τCT = 0.7, and track likelihood rejection threshold to τRT = 0.1.
In this experiment we do not use the track initialization scheme presented in Chapter 8
since this scheme was not developed at the time of the experiment. Instead, we initialize
new tracks from two unassociated neighboring measurements from different times with an
initial error covariance of P = 5 ∗ I and track likelihood of ϵ = 0.2. The process noise of the
initialized tracks is Q = diag (1, 1, 0.1, 1, 1, 0.1) dt, where dt is the time step of the simulation.
The process noise is large enough to account for not knowning the car’s acceleration, but
small enough to prevent many false measurements from being associated with the track.
In our experiment we compare tracking on SE (2) using a constant velocity model to
tracking using a linear, time-invariant, constant-velocity (LTI-CV) model. For each model
and trajectory, we conduct a Monte-Carlo simulation consisting of 100 iterations 30 seconds
long and compute three statistical measures: track probability of detection (TPD), average
Euclidean error (AEE) in position, and average confirmation time (ACT). Track probability
of detection is the probability that the target is being tracked [88]. The average Euclidean
error, is the confirmed track’s average error in position. The average confirmation time is
the average amount of time until the first track is confirmed.
A depiction of the simulation for the circular, meandering and linear trajectories are
shown in Figs. 6.4, 6.5, 6.6. The target’s trajectory is shown as a black line, and the target’s
final pose is represented as the large black arrowhead. The confirmed tracks’ trajectory is
shown as a piece-wise, green line, and the confirmed tracks’ final pose is represented as a
large green arrowhead. The target’s measurements from the initial to the final time are
represented as magenta dots. The red arrowheads represent different unconfirmed and non-
91

rejected track’s at the final time step of the simulation. The blue asterisks represent the false
measurements received at the last time step of the simulation. Note that during non-linear
motions, the LTI-CV model struggles to track the target. This is shown by there not being a
green trajectory (confirmed track’s trajectory) during parts of the target’s non-linear motion,
or the green trajectory drifting from the black trajectory (target’s trajectory) .
-20 -10 0 10 20
X Pos (m)
-20
-10
0
10
20
Y P
os (
m)
(a) LTI-CV model
-20 -10 0 10 20
X Pos (m)
-20
-10
0
10
20
Y P
os (
m)
(b) SE(2)-CV model
Figure 6.4: Plots of the zoomed in circular trajectories for the LTI-CV and SE(2)-CV models.
-50 0 50
X Pos (m)
-60
-40
-20
0
20
40
60
Y P
os (
m)
(a) LTI-CV model
-50 0 50
X Pos (m)
-60
-40
-20
0
20
40
60
Y P
os (
m)
(b) SE(2)-CV model
Figure 6.5: Plots of the meandering trajectories for the LTI-CV and SE(2)-CV models.
92

-50 0 50
X Pos (m)
-60
-40
-20
0
20
40
60
Y P
os (
m)
(a) LTI-CV model
-50 0 50
X Pos (m)
-60
-40
-20
0
20
40
60
Y P
os (
m)
(b) SE(2)-CV model
Figure 6.6: Plots of linear trajectories for the LTI-CV and SE(2)-CV models.
Table 6.1: Statistical measures from the experiment
Circular Meandering LinearTPD AEE ACT TPD AEE ACT TPD AEE ACT
SE(2)-CV 0.96 0.29 0.90 0.96 0.29 0.87 0.96 0.29 0.74LTI-CV 0.54 1.32 0.49 0.88 0.45 0.44 0.97 0.34 0.42
The statistical measures from the experiment are in Table 6.1. As stated in the
table, the constant-velocity, target model on SE (2) tracked the target significantly better
for the circular and meandering trajectories, and about the same as the LTI model for the
linear trajectory. This is because the LTI model struggles to track non-linear motion. In
Subfigure 6.5a you can see that during the straight segments, the LTI model tracks the
target well, but looses the target as it turns. Table 6.1 shows that the target model on
SE (2) had less error than the LTI model; however, on average the LTI model had faster
track confirmation time.
6.6 Conclusion
In this chapter we have shown how to adapt the IPDAF to connected, geodesically
complete, Lie groups in detail. In our experiment, we showed that a constant-velocity target
model on SE (2) is significantly better at tracking non-linear motion than the constant-
93

velocity, LTI model in dense clutter. This is because the LTI model expresses only linear
motion and cannot predict non-linear motion such as curvy and circular trajectories. Since
the SE (2) model expresses non-linear and linear motion, it is able to predict both types of
motion and track them well. We have also shown that the LG-IPDAF is capable of quickly
rejecting and confirming tracks with high fidelity.
94

CHAPTER 7. CENTRALIZED MEASUREMENT FUSION
The Lie group integrated probabilistic data association filter (LG-IPDAF) is designed
to track targets using a single sensor. When tracking with multiple sensors, some or all of the
sensors may produce measurements at the same time. When this occurs, we must consider
how to properly integrate the track-associated measurements from the different sensors to
improve the state estimate, error covariance, and track likelihood of each track. One common
approach that we use is centralized measurement fusion (CMF).
In centralized measurement fusion, the sensors send their data to a single processing
node that runs the MTT algorithm (in this case G-MTT). The MTT algorithm uses the
measurements to update the tracks and then sends confirmed tracks to other consumer
systems. This architecture is depicted in Fig. 7.1. This approach is optimal in the sense
that all of the sensor data from all of the sensors is being used to improve the track, and is
commonly used in small sensor networks since the communication bandwidth is high enough
to send the sensor data from every sensor to the central processor.
Two common approaches to CMF are parallel centralized measurement fusion and
sequential centralized measurement fusion. In parallel fusion, when multiple sensors produce
measurements at the same time, all of the measurements from these sensors are taken into
account simultaneously to update the tracks in a single update. In sequential fusion, when
multiple sensors produce measurements at the same time the measurements are incorporated
sequentially using the standard single-sensor tracking algorithm (in this case the LG-IPDAF).
This is done by propagating the track forward in time to the time stamp of the measurements,
and then updating the tracks using the measurement from the first sensor only, followed by
the second, third, and so on until all of the track-associated measurements have been used
to update the tracks. These two approaches are depicted in Fig. 7.2.
95

Centralized Fusion
Figure 7.1: A depiction of centralized fusion. The circles represent the sensors, the trianglesrepresent the consumer systems, the square represent the processing node, the arrow shows thedirection data travels, Zsℓ denotes the data from sensor sℓ, and T N1 denotes the tracks from theprocessing node.
MultisensorData
Associationand Filtering
SingleSensorData
Associationand
Filtering
SingleSensorData
Associationand
Filtering
Parallel Centralized Fusion Sequential Centralized Fusion
Figure 7.2: A depiction of the parallel and sequential fusion. The current time and previous timeare denoted tk and tk− . The data from sensor sℓ is denoted Z
sℓk , the current jth track conditioned
on previous measurements is T jk|k−
, and the current track conditioned on the previous and new
measurements up to sensor sℓ is T jk|k,sℓ
.
The LG-IPDAF filter is based on the probabilistic data association filter (PDAF).
The PDAF is extended to perform parallel centralized fusion in [89]. Similar algorithms
to the PDAF, the joint probabilistic data association filter (JPDAF) and the interactive
multiple model JPDAF using linear motion models are extended to perform parallel fusion
in [90]–[92]. In addition, the parallel fusion algorithm is compared against the sequential
96

fusion algorithm, and the authors conclude that the sequential fusion approach tracks better
than the parallel fusion approach in dense clutter. This is an interesting result since in [93],
it is stated that for the Kalman filter the sequential and parallel approach are equivalent,
and the Kalman filter is similar to the JPDAF.
The integrated probabilistic data association filter (IPDAF) was extended to perform
parallel centralized fusion and distributed fusion in [94] for two sensors. See [95], [96] for an
overview of distributed sensor fusion. The IPDAF is extended to Lie groups in Chapter 6,
and in this chapter we extend the LG-IPDAF to work with parallel fusion. We refer to
this extension as multi-sensor LG-IPDAF (MS-LG-IPDAF). We also compare the parallel
fusion approach to the sequential fusion approach in simulation by tracking multirotors on
SE (2) using a network of radar sensors. Our comparison differs from [90]–[92], since we do
not assume that the tracks are already initialized, instead we rely on the tracking algorithm
presented in Chapter 8 to initialize the tracks.
The rest of this chapter is organized as follows. In Section 7.1 we provide an overview
of the MS-LG-IPDAF algorithm. In Section 7.2 we present the augmented system model used
to perform parallel centralized measurement fusion. In Section 7.3 we derive the update step
for the MS-LG-IPDAF algorithm. In Section 7.4 we present the experiment and experimental
results. Lastly, in Section 7.5 we conclude.
7.1 Parallel Centralized Measurement Fusion with the LG-IPDAF Overview
The MS-LG-IPDAF is the extension of the LG-IPDAF to work with a network of
sensors using parallel centralized measurement fusion and relies heavily on the assumptions
and theory presented in Chapter 6. We present the MS-LG-IPDAF under the assumption
of a single target and relax this constraint later to accommodate multiple targets.
Let S =1, 2, · · · , NS
denote the indexing set of sensors, and sℓ ∈ S denote the ℓth
sensor. A sensor scan occurs when one or more sensors observe their respective measurement
space and produces measurements. We denote the indexing set of sensors that produced mea-
surements during the sensor scan at time tk as Sk =a1, a2, . . . , aN | ai ∈ N and ai ≤ NS
⊆
S where N ≤ NS is the number of sensors that produced measurements during the sensor
97

scan. We denote sensor aℓ from Sk using bold font as sℓ. Note that sℓ may not be the same
sensor as sℓ.
Let msℓk denote the number of track-associated measurements from sensor sℓ at time
tk and Msℓk = 1, 2, · · · ,msℓ
k denote the indexing set of track-associated measurements. The
set of track-associated measurements from sensor sℓ at time tk is Zsℓk =
zsℓk,jm
sℓk
j=1, where
zsℓk,j is the jth associated measurement from sensor sℓ. The direct product of the associated
measurements from every sensor that produced measurements at time tk is
ZSk = Zs1
k × Zs2k × · · · × ZsN
k , (7.1)
and the set of all associated measurements from the initial time to the current time tk is
ZS0:k =
ZSi
k
i=0.
The MS-LG-IPDAF assumes that a sensor produces at most one target-originated
measurement when it produces measurements. Therefore, for sensor sℓ ∈ Sk, given the set of
new track-associated measurements Zsℓk either one of the measurements is target originated
or none of them are. These possibilities are referred to as association events denoted θsℓk,αℓ
with the subscript αℓ > 0 meaning that the track-associated measurement zsℓk,αℓis the target
originated measurement and all other measurements from sensor sℓ are false, and with αℓ = 0
meaning that all of the track-associated measurements from sensor sℓ are false. This indicates
that for sensor sℓ there are a total of msℓk + 1 association events.
For example, let Zsℓk =
zsℓk,1, z
sℓk,2
, then the three possible association events are:
zsℓk,1 is the target originated measurement and zsℓk,2 is a false measurement, zsℓk,2 is the target
originated measurement and zsℓk,1 is a false measurement, or both measurements are false.
Using the association events from the sensors in Sk, we construct all mutually exclusive
joint association events. Let
A =(α1, α2, . . . , αN) ∈ ZN | 0 ≤ αℓ ≤ msℓ
k + 1, (7.2)
98

denote the indexing set of all mutually exclusive joint association events, then for α ∈ A,
the corresponding joint association event is
θk,α = θs1k,α1∩ θs2k,α2
∩ · · · ∩ θsNk,αN. (7.3)
We use the same subsubscripts for the sensor and measurement to facilitate notation. We
let the joint association event θk,α=0 indicate the event that all of the measurements from all
of the sensors are false measurements.
Let βk,α denote the probability of the joint association event θk,α and βsℓk,αℓ
denote the
probability of an individual association event θsℓαℓ. As discussed in [94] the association events
θsℓk,αℓare not independent. This means that the probability of the joint association event βk,α
is not the product of the probability of each association event βsℓk,αℓ
. However, it is assumed
in [97] and [90] that the association events θsℓk,αℓare independent. It is shown by these authors
that this assumption works well. We use the same assumption in our algorithm.
The MS-LG-IPDAF makes the following assumptions:
7.1. There exists a single target that can be observed by multiple sensors and modeled by
a constant-velocity, white-noise driven target model defined in equation (4.1).
7.2. A sensor scan occurs whenever one or more sensor observes their respective sensor
surveillance regions. Each sensor sℓ ∈ Sℓ that produces measurements at the sensor
scan associated with time tk producesmsℓk validated measurements denoted
zsℓk,jmsℓ
j=1=
Zsℓk .
7.3. At every sensor scan, each sensor produces at most one target originated measurement
and all others are false (i.e. non target-originated measurements).
7.4. The senor sℓ detects the target with probability P sℓD ∈ [0, 1].
7.5. The target-originated measurement from sensor sℓ is associated with a track that rep-
resents the target with probability P sℓG . The probability P sℓ
G is discussed in Section 6.3.
7.6. The false measurements from sensor sℓ are independently identically distributed (iid)
with uniform spatial density λsℓ .
99

7.7. The expected number of false measurements every time sensor sℓ produces measure-
ments is modeled using the density function µsℓF . In this chapter, µsℓF denotes a Poisson
distribution defined as
µsℓF (ϕ) = exp (λsℓVsℓk )(λsℓVsℓk )ϕ
ϕ!, (7.4)
where Vsℓk is the volume of the validation region defined in Section 6.3, λsℓVsℓk is the
expected number of false measurements, and ϕ is the number of false measurements.
7.8. The past information about a track is summarized as(xk−|k− , Pk−|k− , ϵk−|k−
)where
xk−|k− , Pk−|k− , and ϵk−|k− denote the track’s state estimate, error covariance and track
likelihood at the previous time and conditioned on the previous track-associated mea-
surements.
7.9. The sensors are independent.
7.10. The association events θsℓk,αℓare independent.
7.11. The confirmed track with the highest track likelihood represents the target.
When new measurements are received, MS-LG-IPDAF performs three steps: the track
prediction step, the data association step and the update step. In the track prediction step,
the tracks are propagated forward in time using the LG-IPDAF prediction step presented
in Section 6.2. In the data association step, the measurements are associated to tracks as
discussed in the LG-IPDAF data association algorithm in Section 6.3 with the modification
that a validation region is constructed for each sensor. In the update step, the MS-LG-IPDAF
uses an augmented system model presented in Section 7.2 to simultaneously incorporate all
of the measurements to update the tracks using the method presented in Section 7.3.
7.2 Augmented System Model
The augmented system model uses the same state transition function defined in equa-
tion (4.2) with an augmented observation function. Using the system model defined in
equation (4.1), we create an augmented observation function for each joint association event
defined in equation (7.3). Let Sα = sa, sb, . . . ⊆ Sk denote the subset of sensors that
100

produce target originated measurements according to the joint association event θk,α. The
corresponding augmented observation function hSα is defined as
zk,α = hSα(xk, r
Sαk
)= (hsa (xk, r
sak ) , hsb (xk, r
sbk ) , . . .) , (7.5)
where hsℓ is the observation function for sensor sℓ, rsℓk ∼ N (0, Rsℓ) is the measurement
noise for sensor sℓ, xk is the target’s state, zk,α =(zsak,αa
, zsbk,αb, . . .
)∈ GSα
= Gsa ×Gsb
× . . . is
the augmented measurement where zsℓk,αℓis the target-originated measurement from sensor sℓ
according to the joint association event θk,α, and rSαk = (rsak , r
sbk , . . .) ∈ RSα
= Rsa×Rsb
×· · ·is the augmented measurement noise with covariance
RSα = diag (Rsa , Rsb , . . .) , (7.6)
where we used Assumption 7.9. that the sensors are independent to form the block diagonal
measurement noise covariance.
The Lie group of the augmented measurement is denotedGSα and is the direct product
of the sub Lie groups Gsℓ; thus, all of its properties are inherited from the sub Lie groups as
discussed in Section 3.4.4. Using Section 3.4.4, the exponential and logarithm maps of GSα
are
ExpGSαI
(rSαk)=(
ExpGsaI (rsak ) ,Exp
GsbI (rsbk ) , . . .
)
(7.7)
LogGSαI (zk,α) =
(
LogGsaI
(zsak,αa
),Log
GsbI
(zsbk,αb
), . . .
)
. (7.8)
Under the assumption that the sensors are independent, the Jacobians of the aug-
mented observation function are
HSαk
=∂hSα
∂x
∣∣∣∣ζhSαk
=[
Hsa⊤
k , Hsb⊤
k , . . .]⊤
(7.9a)
V Sαk
=∂hSα
∂rSα
∣∣∣∣ζhSαk
= diag (V sak , V sb
k , . . .) , (7.9b)
101

where ζhSαk= (xk, 0) ∈ Gx ×RSα , H
sℓk is the Jacobian of the observation function hsℓ with
respect to the target’s state and evaluated at the point ζhsℓk= (xk, 0), and V
sℓk is the Jacobian
of the observation function hsℓ with respect to the measurement noise rsℓk and evaluated at
the point ζhsℓk= (xk, 0).
The augmented observation function can be thought of as combining all of the sensors
into a single sensor for each joint association event. With that idea in mind, the derivation of
the update step for the MS-LG-IPDAF becomes very similar as the derivation of the update
step for the LG-IPDAF.
7.3 MS-LG-IPDAF Update Step
The prediction step provides us the probability of the track’s state conditioned on
the track representing the target and the previous measurements ZS0:k− defined as
p(xk | ϵk, ZS
0:k−
)= η exp
(
−1
2x⊤k|k−P
−1k|k− xk|k−
)
, (7.10)
where xk|k− = LogGxI
(
x−1k|k−xk
)
is the error state, xk|k− is the state estimate and Pk|k− is the
error covariance at time tk and conditioned on the previous measurements.
The probability of the augmented measurement zk,α conditioned on θk,α, the track’s
state, the track representing the target and the previous measurements ZS0:k− is denoted as
p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)and is approximated as Gaussian using the following lemma.
Lemma 7.3.1. Let zk,α =(zs1k,α1
, zs2k,α2, . . .
)denote the augmented measurement correspond-
ing to the joint association event θk,α = θs1k,α1∩ θs2k,α2
∩ · · · ∩ θsNk,αNwhere α = 0. We suppose
directly that the sensors are independent, that the association events θsℓαℓin θk,α are indepen-
dent, and that a target-originated measurement is related to the target’s state by the observa-
tion function as stated by Assumptions 7.1., 7.9. and 7.10., then the Gaussian approximation
p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)is
p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)=
[∏
sℓ∈Sα
(P sℓG )−1
]
p(zk,α | ψ, xk, ϵk, ZS
0:k−
)
102

=
[∏
sℓ∈Sα
(P sℓG )−1
]
η exp
(
−1
2
(zk,α −HSα xk|k−
)⊤ (RSα
)−1 (zk,α −HSα xk|k−
))
(7.11)
where
zk,α = LogGSαI
(z−1k,αzk,α
)(7.12a)
zk,α = hSα(xk|k− , 0
)(7.12b)
RSαk = V Sα
k RSα(V Sαk
)⊤, (7.12c)
xk|k− and xk|k− are the track’s state estimate and error state at time tk and conditioned on the
track representing the target and the measurements ZS0:k−. The augmented observation func-
tion hSα and the augmented measurement noise covariance RSα are defined in equations (7.5)
and (7.6). The Jacobians HSαk and V Sα
k are defined in equation (7.9) and evaluated at the
point ζhSαk=(xk|k− , 0
).
Proof. The joint association event θk,α in p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)indicates that all of the
measurement in the augmented measurement zk,α are target originated and inside the val-
idation region. According to the definition of the validation region, a target-originated
measurement from sensor sℓ falls within the validation region with probability P sℓG . Using
the assumption that sensors are independent and the relation in equation (6.21),
p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)=
[∏
sℓ∈Sα
(P sℓG )−1
]
p(zk,α | ψ, xk, ϵk, ZS
0:k−
), (7.13)
where ψ is a Bernoulli variable indicating that all of the measurements in the augmented mea-
surement zk,α are target-originated. The rest of the proof follows directly from Lemma 6.3.1
with the exception that we are using the augmented system model.
The probability of the track’s current state conditioned on the joint association event
θk,α, all validated measurements, and the track representing the target is denoted
p(xk,α | θk,α, ϵk, ZS
0:k
),
103

and is defined in the following lemma.
Lemma 7.3.2. Let zk,α =(zs1k,α1
, zs2k,α2, . . .
)denote the augmented measurement correspond-
ing to the joint association event θk,α. We suppose directly the following: 1) Assump-
tions 7.1.-7.10.. 2) The probability p(zk,α | θk,α, xk, ϵk, ZS
0:k−
)is known and defined in equa-
tion (7.11). 3) The probability p(xk | ϵk, ZS
0:k−
)with state estimate xk|k− and error covariance
Pk|k− is known and defined in equation (7.10), then the maximum a posteriori probability of
the updated track’s state estimate and error covariance conditioned on the track being target
originated, all the measurements, and the joint association event θk,α provided that α = 0
are
xk|k,α = xk|k−ExpGxI
(
µ−k|k,α
)
(7.14)
Pk|k,α = JGxr
(
µ−k|k,α
)
P−k|k,αJ
Gxr
(
µ−k|k,α
)⊤
(7.15)
where
µ−k|k,α = Kk,ανk,α (7.16a)
νk,α = LogGSαI
((zk,α)
−1 zk,α)
(7.16b)
zk,α = hSα(xk|k− , 0
)(7.16c)
Kk,α = P−k|k,α
(HSαk
)⊤ (RSαk
)−1(7.16d)
RSαk = V Sα
k RSα(V Sαk
)⊤(7.16e)
P−k|k,α =
((HSαk
)⊤ (RSα
)−1HSαk + P−1
k|k−
)−1
, (7.16f)
µ−k|k,α is the updated error state mean before begin added to the state estimate xk|k− and reset
to zero in equation (7.14), νk,α is the innovation term, Kk,α is the Kalman gain, P−k|k,α is the
updated error covariance before the error state mean is reset to zero, hSα is the augmented
observation function defined in equation (7.5), RSα is the augmented measurement noise
covariance defined in equation (7.6), and HSαk , V Sα
k are the Jacobians of the augmented
observation function defined in equation (7.3) and evaluated at the point ζhSαk=(xk|k− , 0
).
104

In the case that θk,α=0, then all of the track-associated measurements are false and
xk|k,α=0 = xk|k− (7.17)
Pk|k,α=0 = Pk|k− , (7.18)
since no new information was provided to improve the estimates.
Consequently, the probability of the track’s state conditioned on the joint association
event θk,α, it representing the target, and all track-associated measurements is
p(xk,α | θk,α, ϵk, ZS
0:k
)= η exp
(
x⊤k|k,αP−1k|k,αxk|k,α
)
where xk|k,α = ExpGxI
(
x−1k|k,αxk
)
.
The proof of Lemma 7.3.2 is in Appendix B.1.
The probability of a joint association event conditioned on the track representing the
target and all validated measurements is denoted
βk,α ≜ p(θk,α | ϵk, ZS
0:k
).
As previously mentioned, we assume that the probability of the joint association event
βk,α is the product of composing association events βsℓk,αℓ
; therefore,
βk,α ≈ βsak,αa
βsbk,αb
· · · , (7.19)
where
βsℓk,αℓ
=
Lsℓk,αℓ
1−PsℓD P
sℓG +
∑msℓk
j=1 Lsℓk,j
αℓ ∈ Msℓk
(1−P sℓG P
sℓD )
1−PsℓD P
sℓG +
∑msℓk
j=1 Lsℓk,j
αℓ = 0,
(7.20)
Lsℓk,j =
P sℓD
λsℓp(zsℓk,j | ψ, ϵk, ZS
0:k−
), (7.21)
and p(zsℓk,j | ψ, ϵk, ZS
0:k−
)is defined in equations (6.16) and (6.17).
105

According to the law of total probability, the probability of the track’s current state
conditioned on it representing the target and all validated measurements is
p(xk | ϵk, ZS
0:k
)=∑
α∈A
p(xk,α | θk,α, ϵk, ZS
0:k
)βk,α. (7.22)
The expected value and covariance of p(xk | ϵk, ZS
0:k
)are xk|k and Pk|k. These are the track’s
updated state estimate and error covariance. Equation (7.22) is approximated using the
smoothing property of conditional expectations to calculate the mean and the corresponding
covariance as discussed in [87].
If the state estimate were in Euclidean space, the smoothing property of conditional
expectation would use the validated measurements to calculate the updated state estimatesxk|k,α
α∈Aaccording to Lemma 7.3.2, and then fuse these state estimates together according
to the equation
xk|k =∑
α∈A
xk|k,αβk,α.
However, this approach does not work with arbitrary Lie groups since not every Lie group
has a vector space structure. Instead we solve equation (7.22) indirectly by posing the
problem in the Cartesian algebraic space. This is done by noting that p(xk,α | θk,α, ϵk, ZS
0:k
)=
p(x−k,α | θk,α, ϵk, ZS
0:k
)where x−k|k,α ∼ N
(
µ−k|k,α, P
−k|k,α
)
is the error state after being updated
by the measurement zk,α and before its mean µ−k|k,α is added to the state estimate xk|k− with
the relation xk,α = xk|k−ExpGxI
(
x−k|k,α
)
. The mean µ−k|k,α and covariance P−
k|k,α are defined
in Lemma 7.3.2. Using this relationship, an equivalent expression to equation (7.22) is
p(x−k | ϵk, ZS
0:k
)=∑
α∈A
p(x−k,α | θk,α, ϵk, ZS
0:k
)βk,α, (7.23)
where x−k|k ∼ N(
µ−k|k, P
−k|k
)
with the relation xk = xk|k−ExpGxI
(
x−k|k
)
. Since the means of
the error states
µ−k|k,α
α∈Aare in the Cartesian algebraic space they can be scaled, summed
together and then added onto the state estimate xk|k− .
Lemma 7.3.3. We suppose directly that the means of the error states
µ−k|k,α
α∈Aand their
covariances
P−k|k,α
α∈Aare known and defined in Lemma 7.3.2, and that the probabilities
106

of the joint association events βk,αα∈A are known and defined in equation (7.20), then
according to the smoothing property of conditional expectations, the mean and the error
covariance of the error state x−k|k are
µ−k|k =
∑
α∈A
µ−k|k,αβk,α (7.24)
P−k|k =
∑
α∈A
βk,αP−k|k,α +
∑
α∈A
βk,αµ−k|k,α
(
µ−k|k,α
)⊤
− µ−k|k
(
µ−k|k
)⊤
. (7.25)
Proof of Lemma 7.3.3 is in Appendix B.2.
The mean of the error state µ−k|k is reset to zero by adding it onto the state estimate
xk|k− and updating the error covariance accordingly. Using the process derived in the proof
of Lemma 7.3.2, the reset mean and corresponding error covariance are
xk|k = xk|k−ExpGxI
(
µ−k|k
)
(7.26)
Pk|k = JGxr
(
µ−k|k
)
P−k|kJ
Gxr
(
µ−k|k
)⊤
. (7.27)
Therefore, the updated state estimate and error covariance of p(xk | ϵk, ZS
0:k
)are xk|k and
Pk|k.
Lemma 7.3.4. We suppose directly Assumptions 7.1.-7.10.. Given the set of the validated
measurements ZSk and the current track likelihood conditioned on the previous measurements
p(ϵk | ZS
0:k−
), the update for the track likelihood is
p(ϵk | ZS
0:k
)=
p(ϵk | ZS
0:k−
)υk
1 + p(ϵk | ZS
0:k−
)(υk − 1)
, (7.28)
where
υk =∏
sℓ∈sk
msℓk∑
j=1
Lsℓk,j + (1− P sℓ
D PsℓG )
, (7.29)
and Lsℓk,j is defined in equation (7.21).
107

The proof of Lemma 7.3.4 is in Appendix B.3. If the initial error covariance Pk|k−
is used to calculate the term Lsℓk,j for every sensor when performing sequential measurement
fusion, the track likelihood update for parallel and sequential fusion are equivalent.
Using the track likelihood, a track is either rejected after the update step if the track
likelihood is below the threshold τTR, confirmed to be a good, possible representation of the
target if the track likelihood is above the threshold τTC , or neither rejected nor confirmed
until more information is gathered with new measurements. The confirmed track with the
highest track likelihood is assumed to represent the target.
7.3.1 Summary
In this section we summarize all of the lemmas from this chapter into one theorem to
present the update step for the MS-LG-IPDAF.
Theorem 7.3.1. Let ZSk denote the set of track associated measurements at time tk from the
sensors in Sk. We assume directly Assumptions 7.1.-7.10., and that the track’s state estimate
xk|k−, error covariance Pk|k− and track likelihood p(ϵk | ZS
0:k−
)at time tk and conditioned
on the previous measurements are known, then the track’s updated state estimate, error
covariance, and track likelihood are
xk|k = xk|k−ExpGxI
(
µ−k|k
)
(7.30)
Pk|k = JGxr
(
µ−k|k
)
P−k|kJ
Gxr
(
µ−k|k
)⊤
(7.31)
p(ϵk | ZS
0:k
)=
p(ϵk | ZS
0:k−
)υk
1 + p(ϵk | ZS
0:k−
)(υk − 1)
, (7.32)
where
µ−k|k =
∑
α∈A
µ−k|k,αβk,α (7.33a)
P−k|k =
∑
α∈A
βk,αP−k|k,α +
∑
α∈A
βk,αµ−k|k,α
(
µ−k|k,α
)⊤
− µ−k|k
(
µ−k|k
)⊤
(7.33b)
µ−k|k,α = Kk,ανk,α (7.33c)
108

νk,α = LogGSαI
((zk,α)
−1 zk,α)
(7.33d)
zk,α = hSα(xk|k− , 0
)(7.33e)
Kk,α = P−k|k,α
(HSαk
)⊤ (RSαk
)−1(7.33f)
RSαk = V Sα
k RSα(V Sαk
)⊤(7.33g)
P−k|k,α =
((HSαk
)⊤ (RSα
)−1HSαk + P−1
k|k−
)−1
(7.33h)
υk =∏
sℓ∈sk
msℓk∑
j=1
Lsℓk,j + (1− P sℓ
D PsℓG )
. (7.33i)
The term Lsℓk,j is defined in equation (7.21), βk,α is the probability of the joint association
event θk,α defined in equations (7.19) and (7.20), µ−k|k,α is the updated error state mean before
being reset to zero and conditioned on θk,α, νk,α is the innovation term, Kk,α is the Kalman
gain, P−k|k,α is the updated error covariance before the error state mean is reset to zero,
hSα is the augmented observation function defined in equation (7.5), RSα is the augmented
measurement noise covariance defined in equation (7.6), and HSαk , V Sα
k are the Jacobians
of the augmented observation function defined in equation (7.3) and evaluated at the point
ζhSαk=(xk|k− , 0
).
Even though the MS-LG-IPDAF is designed to track a single target we can relax this
constraint by modifying the original assumptions with the following assumptions: there are
multiple targets, a sensor detects the targets with the same probability provided that the
target is in the sensor’s sensor surveillance region, when a sensor produces measurements it
produces at most one target-originated measurement per target, and that the tracks and data
association process are independent. The last revised assumption means that a measurements
is associated to every track whose validation region it falls into, and the tracks are updated
without considering any other track. This allows us to use the normal MS-LG-IPDAF update
step for each track. Lastly, we assume that every confirmed track represents a target.
7.4 Experiment
The simulated experiment consists of tracking multirotors constrained to a plane us-
ing three radar systems that can detect the target’s relative azimuth and depth. The radar
109

systems are aligned in an array on the ground 20 meters apart from each other pointing
straight up. Each radar system has a range of 100 meters and a field of view (FOV) of
90 degrees. The variance of the relative depth and angle is 1e−3 meters and 1e−2 radians
respectively. The spatial density of each radar system is set to 1e−3; unless otherwise spec-
ified. Each radar detects the target with probability PD = 0.95, and the probability that a
target originated measurement is associated to the track is set to PG = 0.9. The three radar
systems simultaneously produce measurements at a rate of 13hz.
7.4.1 System Model
Since the target’s are constrained to a plane and have an orientation and position,
we represent their natural configuration manifold using the special Euclidean group SE (2).
The Lie group SE (2) is defined in Appendix C.4. The target’s state is x = (g, v) ∈ Gx=
SE (2)×RSE(2) where g ∈ SE (2) and v ∈ RSE(2).
We denote the target’s pose as
g =
R p
01×2 1
, (7.34)
where R ∈ SO (2) is the rotation from the target’s body frame to the tracking frame and
p = [px, py]⊤ is the target’s position expressed in the tracking frame and with respect to the
tracking frame. The Lie group SO (2) is defined in Appendix C.2.
We denote the target’s twist as
v =
ρ
ω
(7.35)
where ρ is the target’s translational velocity with respect to the tracking frame and expressed
in the body frame, and ω is the target’s angular velocity with respect to the tracking frame
and expressed in the body frame.
110

The state transition function defined in equation (4.2) and the Jacobians of the state
transition functions defined in equation (4.5) are used for the UAS with the definition and
properties of the Lie group SE (2) in Appendix C.4.
Since a radar measures the target’s relative azimuth and depth, we represents its
measurement manifold as the direct product of SO (2) and R. The special orthogonal group
SO (2) represents the natural configuration manifold of the azimuth since it expresses all
rotations and angles in two dimensions, and the Euclidean space R represents the natural
configuration manifold of the range. For the properties of SO (2) see Appendix C.2, and
for the properties of R see Appendix C.1. The measurement from sensor sℓ is denoted
zsℓ ∈ Gsℓ
= SO (2)× R.
The proposed observation function for sensor sℓ is
hsℓ (xk, rsℓk ) = (d (xk) , φ (xk)) Exp
GsℓI (rsℓk ) (7.36)
where
d (xk) =√
p⊤k pk (7.37a)
φ (xk) = ExpSO(2)I
(
arctan
(pykpxk
))
, (7.37b)
the function d calculates the relative depth, the function φ calculates the relative angle,
the target’s position is pk = [pxk , pyk ]⊤, and rsℓk ∼ N (0, Rsℓ) ∈ Rsℓ
= RSO(2) × RR is the
measurement noise.
Lemma 7.4.1. Given the observation function in equation (7.36), the Jacobians of the
observation function with respect to the state and measurement noise and evaluated at the
point ζhsℓk= (xk, 0) are
Hsℓk =
∂h
∂x
∣∣∣∣ζhsℓk
=
p⊤k Rk/d (xk) 01×4
p⊤k Rk [−1]1× /d (xk)2 01×4
(7.38)
V sℓk =
∂h
∂r
∣∣∣∣ζhsℓk
= I2×2, (7.39)
111

where vk, pk, and Rk are the target’s estimated velocity, position and orientation, [·]1× is the
skew symmetric operator defined in equation (C.3), and the function d : Gx → R is defined
in equation (7.37).
Proof. We begin with solving for Hsℓk . Since the measurement noise is evaluated at zero,
we set it to zero to simplify the derivation. We also drop the dependency on time since it
does not affect the derivation. Let τ = [τ px , τ py , τR, τ vx , τ vy , τω]⊤ ∈ Rx denote the vector we
are perturbing the state by when taking the derivative. Using τ , we condense notation by
writing the derivative as if we are taking the derivative with respect to all of the components
of τ simultaneously, but we are actually computing the derivative one component at a time.
We denote the partial derivative of a generic function Φ(x) w.r.t x as Φ′, and define
the functions
a1 (x) =pxpy
a2 (x) = p⊤p,
where p = [px, py]⊤ is the target’s position. We define the observation function with mea-
surement noise set to r = 0 as the composite function
h (x, 0) ≜(
sqrt (a2 (x)) ,ExpSO(2)I (arctan (a1 (x)))
)
where we dropped the superscript indicating the sensor since all the sensors have the same
observation function.
Using the chain rule we get
h′
(x, 0) =(
sqrt′
(a2 (x)) a′
2 (x) , ExpSO(2)
′
I (arctan (a1 (x))) arctan′
(a1 (x)) a′
1 (x)
)
=
1
2√a2(x)
a′
2 (x)
I1×11
1+a1(x)2a
′
1 (x)
, (7.40)
where we used the definition of the right Jacobian for SO (2) in equation (C.8) to note that
ExpSO(2)
′
I = I1×1, and where we have changed to using matrix notation.
112

Before calculating a′
1 and a′
2 using the definition of the derivative, we explicitly write
the perturbed pose gp = gExpSE(2)I (τ g) as
gp =
RExp
SO(2)I
(τR)
RV (τω) τ p + p
0 1
,
where τ g = [τ px , τ py , τR]⊤, τ p = [τ px , τ py ]⊤, g is the target’s pose, and the function V is
defined in equation (C.23).
Noting that both τ p and τR cannot both be nonzero when taking the derivative we
simplify the perturbed pose to
gp = xExpSE(2)I (τ g) =
RExp
SO(2)I
(τR)
Rτ p + p
0 1
.
We denote the components of the rotation matrix R as
R =
R11 R12
R21 R22
.
Using the definition of the derivative
a′
1 = limτ→0
py+R21τpx+R22τpy
px+R11τpx+R12τpy − py
px
τ
= limτ→0
py+R21τpx+R22τpy
px+R11τpx+R12τpy
px−R11τpx−R12τpy
px−R11τpx−R12τpy − py
px
τ
= limτ→0
pypx+P⊤R[−1]1×ρ−H.O.T.
(px)2−H.O.T
− pypx
τ
=[p⊤R[−1]1×
p2x01×4
]
, (7.41)
where H.O.T. indicate the higher order terms that go to zero, and
a′
2 = limτ→0
(p+Rτ p)⊤ (p+Rτ p)− p⊤p
τ
113

= limτ→0
2p⊤Rτ p
τ(7.42)
=[
2p⊤R 01×4
]
. (7.43)
Substituting equations (7.41) and (7.43) into equation (7.40) yields (7.38). The proof of V sℓk
is trivial and will not be provided.
7.4.2 Simulated Experiments
We test the performance of the parallel and sequential LG-IPDAF algorithms by in-
tegrating them with G-MTT. The parallel LG-IPDAF algorithm is the algorithm we derived
in the chapter called MS-LG-IPDAF.
In the experiment there are three multirotors. The first target moves left to right
with an altitude of 55 meters at 1.5m/s, the second target moves right to left with a relative
altitude of 20 meters at 1.5m/s, and the third target moves in a circle with a radius of 10
meters above the center radar. All of the targets begin and stay in the filed of view (FOV) of
at least one radar during the experiment except for the second target which leaves the FOV
of the radars towards the end of the simulation. A track is confirmed if the track likelihood is
above τTC = 0.7 and is rejected if the track likelihood is below τTR = 0.1. When a track is in
the FOV of a single radar, the sequential and parallel fusion approach for the corresponding
track are equivalent.
The simulation lasts for 60 seconds. At the end of each simulation, the average
Euclidean error (AEE) in position and the target probability of detection (TPD) is calculated
according to the method in [88]. To calculate these metrics, after running the update step
we associate a confirmed track to a target if the track is within 5 meters of the target. If
the track is associated to a target, then the Euclidean error in position is calculated and the
target is assumed to be detected.
A depiction of the simulation is shown in Fig. 7.3, and a video of the simulation can
be seen at https://www.youtube.com/watch?v=3pfLQghovD8&ab channel=MAGICCLab.
Plots of the target’s and track’s trajectories and the norm of the track’s error covariance are
shown in Fig. 7.4 to validate that the algorithms are working properly. Note that the norm
114

Figure 7.3: An instant in time of the simulation. The black lines represent the FOV of each radarsystem. The red, yellow, and magenta dots represent the point measurements from each respectiveradar system. The green squares represent the targets, and the blue and cyan markers representthe tracks from the parallel and sequential algorithms. In this image, the markers for the targetsand the parallel and sequential algorithm are on top of each other.
of the error covariance changes according to the number of radar sensors that detect it at a
given time stamp.
To understand the purpose of our two experiments we will quickly discuss a key
difference between the sequential and parallel fusion approaches. For this discussion we
assume that the measurement noise for all of the sensors are the same and that the current
state estimate for each algorithm is the same. Under these assumptions and according to the
equations in Theorem 7.3.1, in the parallel fusion approach each sensor influences the state
estimate equally since the Kalman gain is the same for each sensor; however, in the sequential
fusion approach the first sensor influences the state estimate more than the others since the
Kalman gain is larger for the first sensor and decreases as the data from the other sensors
are processed sequentially. If the system is linear, the Kalman gain used in the parallel
115

ParallelFusion
0
20
40
60
80
100
-60 -40 -20 0 20 40 60
yp
os
xpos
EstimatedPositions
0.5
1
1.5
2
2.5
3
0 10 20 30 40 50 60err
or
inm
ete
rs
timeinseconds
ErrorCovarianceNorm
(a) Parallel FusionSequentialFusion
0
20
40
60
80
100
-60 -40 -20 0 20 40 60
yp
os
xpos
EstimatedPositions
0
1
2
3
4
5
6
7
0 10 20 30 40 50 60
err
or
inm
ete
rs
timeinseconds
ErrorCovarianceNorm
(b) Sequential Fusion
Figure 7.4: A comparison between the parallel and sequential fusion approach for a single simulationiteration. In the left images, the true positions are drawn in black and the tracks’ estimated positionsare drawn in different colors. In the right images, the norm of the error covariance for each trackare plotted against time.
116

0 50 100
Number of False Measurements
0.3
0.4
0.5
0.6
0.7
Ave
rag
e E
uclid
ea
n E
rro
r Parallel FusionSequential Fusion
0 50 100
Number of False Measurements
0.7
0.75
0.8
0.85
0.9
0.95
Pro
ba
bili
ty o
f D
ete
ctio
n
Parallel FusionSequential Fusion
Figure 7.5: The average Euclidean error and the probability of detection as a function of the numberof false measurements per sensor scan from each sensor.
fusion approach is the same as the Kalman gain used by the last sensor in the sequential
approach. If the system is non-linear, these two Kalman gains are approximately the same.
This means that overall, the measurements in the sequential approach influence the state
estimate more than the measurements in the parallel approach, and that the first sensor
processed in the sequential approach has more influence than the other sensors. This can
improve the performance of the sequential algorithm if the first sensor is very accurate and
has little measurement noise, or can hurt the performance if the first sensor is very inaccurate
and has lots of measurement noise.
In the first experiment, we perform ten simulations with the spacial density of false
measurements being set to increasing values; λ = 1e−3, 2e−3, 5e−3, 7e−3, 1e−2. These valuescorrespond to each sensor producing 9, 19, 49, 69, 99 false measurements per sensor scan.
We then average the average Euclidean error in position and the track probability of detection
over the ten simulations for each value of λ. The results of this experiment are shown in
Fig. 7.5, and show that sequential and parallel fusion have similar performance. This is a
different result than the ones in [90]–[92]. We believe that this is different because we do
not assume that the initial state of the targets is known. This requires the algorithm to
initialize the tracks using noisy measurements and results in there being error in the initial
state estimate. This initial error may nullify any advantage the sequential approach has on
the parallel approach for this experiment.
117

0 0.1 0.2
Relative Angle Variance in rads2
0.1
0.15
0.2
0.25
0.3
0.35
Avera
ge E
uclid
ean E
rror Parallel Fusion
Sequential Fusion
0 0.1 0.2
Relative Angle Variance in rads2
0.2
0.4
0.6
0.8
1
Pro
babili
ty o
f D
ete
ction Parallel Fusion
Sequential Fusion
Figure 7.6: The average Euclidean error and the probability of detection as a function of the relativeangle variance in the measurement.
The second simulated experiment is similar to the first except that the spacial density
of false measurements is fixed at λ = 1e−3 and the variance of the angle measurement is set to
the values var (φ) = 1e−2, 5e−2, 8−2, 1e−1, 1.5e−1, 2e−1. The idea behind this experiment
is that if the measurement from the first sensor has a lot of error, then the tracks from
the sequential approach would be more likely to drift from the target. The results of this
experiment are in Fig. 7.6 and show that the sequential fusion slightly outperforms the
parallel fusion as the measurement noise increases.
Both experiments show that the performance of the parallel and sequential algorithms
are similar with the sequential approach slightly outperforming the parallel approach. Due
to these results, we propose that the sequential algorithm is preferable since it is more
computationally efficient as discussed in [91], [92].
7.5 Conclusion
In this chapter we derived a parallel centralized measurement fusion for the LG-
IPDAF algorithm called multi-sensor Lie group integrated probabilistic data association
filter (MS-LG-IPDAF). We compared the MS-LG-IPDAF algorithm to the sequential ap-
proach in simulation. The experimental results showed that both approaches have about the
same tracking performance with the sequential approach slightly outperforming the paral-
lel approach. Thus, we propose that the sequential approach is favorable since it is more
computationally efficient.
118

CHAPTER 8. TRACK INITIALIZATION
This chapter derives the track initialization phase of G-MTT discussed in Section 2.3.
The objective of the track initialization algorithm is to initialize new tracks from clusters. A
target that is not initialized (not being tracked by G-MTT) produces measurements extracted
by the sensor. Provided that the measurements of the target are not in the validation region
of any initialized track, its measurements are associated to a cluster as described in Chapter 5.
After enough sensor scans, there will be sufficient measurements in a cluster to observe the
target and initialize a new track.
When tracking in the presence of dense clutter, target-originated measurements are
often mixed with non-target-originated measurements in a cluster. To estimate the current
state estimate of the target whose measurements are in the cluster, G-MTT has to filter out
the non-target-originated measurements when estimating the target’s current state estimate.
This is done using the random sample consensus (RANSAC) algorithm. RANSAC is a
robust regression algorithm that filters out gross outliers when estimating the parameters of
a model [60].
In G-MTT, RANSAC takes a cluster that has a least τCM measurements from distinct
times such that the target according to the system model in equation (4.1) is observable.
Using the cluster, RANSAC seeks to find a current state estimate (referred to as a state
hypothesis) that fits the largest subset of measurements from the cluster subject to the
system model. We refer to this subset of measurements as inliers denoted I. The state
hypothesis and inliers are given to the MS-LG-IPDAF algorithm (derived in Chapter 7)
to filter in the inliers and produce a current state estimate, error covariance, and track
likelihood, which compose a new track. In place of the MS-LG-IPDAF, you can also use
sequential, centralized measurement fusion with the LG-IPDAF as discussed in Chapter 7.
119

The outline of the track initialization process is depicted in Fig. 8.1 where three
clusters are given to the RANSAC algorithm. RANSAC calculates a state hypothesis and
inlier set for each cluster. The current state hypotheses and inliers are given to the MS-LG-
IPDAF algorithm to initialize new tracks.
RANSAC MS-LG-IPDAF
Figure 8.1: An overview of the track initialization process.
8.1 Preliminaries
Let ZCm denote the set of measurements in cluster Cm, and zsji,l ∈ ZCm denote the
lth measurement from sensor sj received at time ti that is in the cluster Cm. Let ψ denote
the Bernoulli random variable that a measurement is target originated, and let xk denote
a target’s state at the current time tk. We denote the probability of the measurement zsji,l
conditioned on the target’s state at time tk and the measurement being target originated as
p(zsji,l | xk, ψ
).
Lemma 8.1.1. Given that a target originated measurement is related to the target’s state
according to the system model defined in equations (4.1) and (4.2) and that the measurement
noise and process noise are independent, then the probability of the measurement zsji,l ∈ ZCm
conditioned on the target’s current state and the measurement originating from the target is
denoted p(zsji,l | xk, ψ
)and approximated as Gaussian as
120

p(zsji,l | xk, ψ
)≈ η exp
(
−1
2Log
Gsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
))
, (8.1)
where
zsji = hsj (f (xk, 0, tk:i) , 0) ,
Rsjk:i = H
sji Gk:iQ (tk:i)G
⊤k:i
(Hsji
)⊤+ V
sji Rsj
(Vsji
)⊤,
f is the state transition function defined in equation (4.2), hsj is the observation function for
sensor sj defined in equation (4.1b), Q (tk:i) is the process noise covariance between the time
interval tk:i, and Hsji , V
sji and Gk:i are the system model Jacobians defined in equation (4.5)
and evaluated at the points ζfk:i = (xk, 0, tk:i) and ζhsji= (f (xk, 0, tk:i) , 0).
Proof. According to the system model defined in equation (4.1), the measurement model
that maps the target’s current state xt to a measurement from sensor ssj received at time ti
is
zsji = hsj
(f (xk, qk:i, tk:i) , r
sji
), (8.3)
where qk:i ∼ N (0, Q (tk:i)) is the process noise covariance. Using the chain rule and the
system Jacobians defined in equation (4.5), the affinization of the measurement model defined
in equation (8.3) is
zsji ≈ hsj (f (xk, 0, tk:i) , 0) Exp
Gsj
I
(Hsji Gk:iqk:i + V
sji r
sji
)(8.4a)
= zsji Exp
Gsj
I
(zsjk:i
), (8.4b)
where zsjk:i = H
sji Gk:iqk:i + V
sji r
sji , z
sji = hsj (f (xk, 0, tk:i) , 0), the system model Jacobians
are defined in equation (4.5) and evaluated at the points ζfk:i = (xk, 0, tk:i) and ζhsji
=
(f (xk, 0, tk:i) , 0).
The probability distribution of zsji is defined in its tangent space by the random
variable zsjk:i using the relation z
sjk:i = Log
GsiI
((zsji
)−1zsji
)
. Thus, to find the probability
distribution of zsji , we calculate the expected value and covariance of z
sjk:i. The expected
121

value and covariance of zsjk:i are
E[zsjk:i
]= E
[Hsji Gk:iqk:i + V
sji r
sji
]= 0 (8.5)
cov(zsjk:i
)= cov
(Hsji Gk:iqk:i + V
sji r
sji
)(8.6)
= Hsji Gk:icov (qk:i)
(Hsji Gk:i
)⊤+ V
sji cov
(rsji
) (Vsji
)⊤(8.7)
= Hsji Gk:iQ (tk:i)
(Hsji Gk:i
)⊤+ V
sji Rsj
(Vsji
)⊤(8.8)
= Rsj
k:i. (8.9)
Therefore, the Gaussian approximation of the probability density function of the measure-
ment is zsji ∼ N
(zsji ,R
sjk:i
), and the probability of the measurement z
sji,l is as defined in
equation (8.1).
8.2 RANSAC
In this section we derive the RANSAC algorithm used in G-MTT for a single clus-
ter. Let Cj denote the jth cluster that has at least τCM measurements from distinct times.
RANSAC randomly selects a subset of measurements from Cj, denoted ZCja ⊂ Cj, containing
τRSC measurements such that the system can be observed using the measurements in ZCja
and that at least one of the measurements in ZCja is from the current time. A depiction of
cluster Cj and the subset of measurements is shown in Fig. 8.2. The green dots represent
the measurements in cluster Cj and the blue dots represent the measurements in the random
subset ZCja ⊂ Cj. The fading of the measurement’s color is used to denote time where the
darker the color indicates the more recent the measurement.
122

(a) A depiction of cluster Cj . (b) A depiction of ZCj
a ⊂ Cj .
Figure 8.2: A depiction of the cluster Cj and a random subset of measurements ZCja ⊂ Cj , where
the measurements in the random subset are represented by blue dots.
RANSAC uses the subset ZCja to estimate the current state that maximizes the prob-
ability of the measurements in ZCja conditioned on the measurements being target originated
and the current state; denoted p(
ZCja | xk, ψ
)
. The output of this maximization is the cur-
rent state hypothesis associated with ZCja denoted xhk,a. RANSAC then finds measurements
in cluster Cj that supports xhk,a according to the system model. These measurements form the
inlier set Ia. Using the inlier set, the state hypothesis is given a score. If the score is greater
than the stopping score criteria τRSS, a new track is initialized using xhk,a and Ia; otherwise,RANSAC counts the number of iterations performed. If RANSAC has not performed τRMI
iterations, it randomly selects a new subset of measurements and repeats the previous steps
to form other state hypotheses and corresponding inlier sets; otherwise, it selects the state
hypothesis with the best score. We denote the state hypothesis and its corresponding inlier
set with the best score as(xhk,b, Ib
). If the best state hypothesis has a minimum score of at
least τRmS, it is used to initialize a new track; otherwise, RANSAC does not initialize a new
track from cluster Cj. The RANSAC algorithm is outlined in Fig. 8.3.
8.2.1 Generating a State Hypothesis
The current state hypothesis xhk,a is estimated using the subset of measurements
ZCja ⊂ Cj by finding the current state that maximizes the probability p
(
ZCja | xk, ψ
)
subject
123

Randomly select asubset of
measurements
Find inliermeasurements to Score
Score
Score greater thanstopping criteria
Performedpredetermined
number of iterations
Keep current statehypothesis
Initialize track with
Yes
No
Select statehypothesis with best
score
Yes
No
Score greater than minimum
requirement
Initialize track withYes
Do not initialize atrack
No
Figure 8.3: An overview of the RANSAC algorithm.
to the system model defined in equation (4.1). We write this optimization problem as
argmaxxk
p(ZCja | xk, ψ
)(8.10a)
s.t. equations (4.1) and (4.2). (8.10b)
The state hypothesis xhk,a is set to the current state than maximizes the optimization problem.
Lemma 8.2.1. Let ZCja ⊂ Cj denote a random subset of measurements from cluster Cj with
the condition that the system defined by the system model in equation (4.1) is observable by
the measurements in ZCja . Assuming that the measurements in the cluster are independent
and given the system model, then the Gaussian approximation of the negative log likelihood
maximization (NLLM) of equation (8.10) is
argminxk
∑
zsji,l∈Z
Cja
LogGsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
)
(8.11)
124

where
zsji = hsj (f (xk, 0, tk:i) , 0) ,
Rsjk:i = H
sji Gk:iQ (tk:i)G
⊤k:i
(Hsji
)⊤+ V
sji Rsj
(Vsji
)⊤,
f is the state transition function defined in equation (4.2), hsj is the observation function for
sensor sj defined in equation (4.1b), Q (tk:i) is the process noise covariance between the time
interval tk:i, and Hsji , V
sji and Gk:i are the system model Jacobians defined in equation (4.5)
and evaluated at the points ζfk:i = (xk, 0, tk:i) and ζhsji= (f (xk, 0, tk:i) , 0).
Proof. Using Lemma 8.1.1 and the assumption that the measurements are independent, the
probability p(
ZCja | xk, ψ
)
can be written as
p(ZCja | xk, ψ
)=
∏
zsji,l∈Z
Cja
p(zsji,l | xk, ψ
)
≈∏
zsji,l∈Z
Cja
η exp
(
−1
2Log
Gsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
))
,
where the terms are defined in Lemma 8.1.1. Taking the negative log of the above equation
yields
p(ZCja | xk, ψ
)
≈ − log
∏
zsji,l∈Z
Cja
η exp
(
−1
2Log
Gsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
))
= − log (η)−∑
zsji,l∈Z
Cja
log
(
exp
(
−1
2Log
Gsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
)))
= − log (η) +1
2
∑
zsji,l∈Z
Cja
(
LogGsj
I
((zsji
)−1zsji,l
)⊤ (Rsjk:i
)−1Log
Gsj
I
((zsji
)−1zsji,l
))
,
125

where we lumped all of the normalizing coefficient η’s into a single η. The term η and the
fraction 12has no impact on the optimization and can be removed from the optimization
resulting in equation (8.11).
In our implementation we use Ceres [98] to solve the least square optimization problem
defined in equation (8.11) for non-linear systems, and use the original method proposed in [63]
for linear systems.
8.2.2 Finding the Inlier Measurements to a State Hypothesis
After calculating the current state hypothesis xhk,a from the subset ZCja , RANSAC
finds other measurements in cluster Cj that support (i.e. inliers to) the state hypothesis xhk,a.A measurement zsib,m ∈ Cj is an inlier to the the state hypothesis xhk,a if the probability of
the measurement zsib,m conditioned on the state hypothesis and it being a target-originated
measurement, denoted p(zsib,m | xhk,a, ψ
), is above a specified threshold. From Lemma 8.1.1
the Gaussian approximation of p(zsib,m | xhk,a, ψ
)is
p(zsib,m | xhk,a, ψ
)≈ η exp
(
−1
2Log
GsiI
((zsib )
−1 zsib,m)⊤
(Rsik:b)
−1 LogGsiI
((zsib )
−1 zsib,m))
(8.13)
where
zsib = hsi(f(xhk,a, 0, tk:b
), 0),
Rsik:b = Hsi
b Gk:bQ (tk:b)G⊤k:b (H
sib )
⊤ + V sib R
si (V sib )⊤ ,
and the system model Jacobians are defined in equation (4.5) and evaluated at the points
ζfk:i = (xk, 0, tk:i) and ζhsji= (f (xk, 0, tk:i) , 0).
Using equation (8.13) we define the inlier metric dsiRI : Gx ×Gsi → R as
dsiRI(xhk,a, z
sib,m
)= Log
GsiI
((zsib )
−1 zsib,m)⊤
(Rsik:b)
−1 LogGsiI
((zsib )
−1 zsib,m), (8.15)
which has a chi-squared distribution. A measurement zsib,m ∈ Cj is an inlier to the state
hypothesis xhk,a if dsiRI(xhk,a, z
sib,m
)≤ τRI . The value of τRI can be chosen similarly as τ siV was
126

chosen for the validation region in Section 6.3. A depiction of the inlier metric and the inlier
measurements corresponding to the state hypothesis xhk,a is shown in Fig. 8.4. The blue dots
represent the measurements in the subset ZCja used to calculate the state hypothesis xhk,a.
The red dotted lines represent the boundary of the inlier threshold τRI , and the red and blue
dots represent the the inliers to the state hypothesis xhk,a.
Figure 8.4: A depiction of the inliers to the current state hypothesis xhk,a, where the red and bluedots are the inliers and the red lines are the boundaries of the inlier threshold according to theinlier metric defined in equation (8.15)
8.2.3 Computing the Score of a State Hypothesis
After computing the state hypothesis xhk,a and finding its inliers Ia, RANSAC gives
the state hypothesis a score to represent how strong the state hypothesis is. The score is
the number of measurements in Ia from distinct times for each sensor. For example, let
Ia =zsia,l, z
sja,m, z
sja,n, z
sib,c, z
sjk,l, z
sjk,m
, then the score is 4 since z
sja,m and z
sja,n count as one since
they are from the same time and sensor, and for the same reason zsjk,l and z
sjk,m count as
one. The reason for this method is because G-MTT assumes that each sensor produces at
most one target-originated measurement for every target per sensor scan. This assumption
implies that both zsja,m and z
sja,n can not be from the target, and hence should not be double
counted.
127

8.2.4 Initializing a New Track
We denote the best state hypothesis and inlier set calculated by RANSAC from a
cluster as(xhk,b, Ib
). If the best state hypothesis has a score of at least τRmS, G-MTT uses it
to initialize a new track. This is done by taking the state hypothesis xhk,b and propagating it
back in time to the same time as the oldest measurement in the inlier set Ib using the state
transition function defined in equation (4.2).
G-MTT then filters in the inlier measurements using the MS-LG-IPDAF algorithm to
compute a current state estimate, error covariance, and track likelihood for a new track. The
initial error covariance and track likelihood used in the filtering process are determined by
the user; however, we recommend setting the initial track likelihood to 0.5 to indicate that
the track is just as likely to represent a target as it is to not represent a target. The inlier
measurements are added to the new track’s consensus set and removed from the cluster.
128

CHAPTER 9. TRACK-TO-TRACK ASSOCIATION AND FUSION
On occasion when tracking multiple targets, some tracks will coalesce as illustrated
in Fig. 9.1. In these instances, the coalescing tracks need to be tested to see if they represent
the same target and fused together if they do. This process is referred to track-to-track
association and fusion. There is an extensive literature on track-to-track association and fu-
sion for linear and many non-linear systems [74], [99]–[101]; however, the literature regarding
track-to-track association and fusion is sparse for Lie groups. In this Chapter we present a
novel track-to-track association and fusion algorithm for Lie groups under the assumption
that tracks are independent.
Measurement Track Error covariance
Figure 9.1: A depiction of two coalescing tracks that represent the same target. The target isrepresented by the walking person. The measurements are represented as black dots. The tracksare denoted as dashed arrows and their covariances are represented as green ellipses.
129

9.1 Track-to-Track Association
A common approach to testing if two tracks should be fused together is by measuring
how far apart the track’s state estimates are from each other. In Euclidean space, this is
simply taking the norm of a weighted difference between the states; however, for most Lie
groups we cannot simply subtract one state from another. Instead, we form a geodesic with
its corresponding tangent vector from one state estimate to the other. The length of this
tangent vector is a measure of how far apart the two state estimates are from each other.
If the distance is small relative to the certainty of each state estimate, then there is a high
probability that the two tracks represent the same target and should be fused together. This
is the intuition behind the following Lemma.
Lemma 9.1.1. We suppose directly that tracks are independent, and that the dimension of
their state is n. Let τA be a parameter related to a certain probability of an n-dimensional
chi-squared cumulative distribution function. Also, let T ℓk|k =
(
xℓk|k, Pℓk|k, . . .
)
for ℓ ∈ i, jdenote the ith and jth track at time k conditioned on all the measurements, then the two
tracks represent the same target with probability determined by τA if
dA
(
T ik|k, T j
k|k
)
=(
eijk|k
)⊤ (
P ijk|k
)−1
eijk|k ≤ τA, (9.1)
where
eijk|k = LogGxI
((xik|k)−1
xjk|k
)
(9.2)
P ijk|k = JGx
−1
l
(
eijk|k
)
P ik|k
(
JGx−1
l
(
eijk|k
))⊤
+ JGx−1
r
(
eijk|k
)
P jk|k
(
JGx−1
r
(
eijk|k
))⊤
, (9.3)
and the inverse of the left and right Jacobians are defined in equations (3.6). The track-to-
track association metric defined in equation (9.1) has a chi-squared distribution of dimension
n where n is the dimension of the state; thus, the value of τA can be chosen from a chi-square
look up chart to correspond to the probability that the two tracks are similar. As an example,
130

if the state is dimension n = 4, then τA = 0.711 means that if two tracks are deemed similar
according to equation (9.1), there is a 95 percent chance that they represent the same target.
Proof. The metric is designed to measure how similar the two tracks are. If the tracks
represent the same target, then their states should be about the same. This implies that if
the probability of the distance between the tracks’ states being zero is high, then the tracks
have a high probability of representing the same target.
The state of the ℓth track at time tk and conditioned on the measurements up to time
tk is denoted xℓk = xℓk|kExp
GxI
(
xℓk|k
)
, where xℓk|k is the state estimate and xℓk|k ∼ N(
0, P ℓk|k
)
is the error state. Let eijk|k ≜ LogGxI
((
xik|k
)−1
xjk|k
)
. The error between these two tracks is
eijk = LogGxI
((xik)−1
xjk
)
= LogGxI
(
ExpGxI
(−xik|k
) (xik|k)−1
xjk|kExpGxI
(
xjk|k
))
= LogGxI
(
ExpGxI
(−xik|k
)ExpGx
I
(
eijk|k
)
ExpGxI
(
xjk|k
))
≈ eijk|k + JGx−1
r
(
eijk|k
)
xjk|k − JGx−1
l
(
eijk|k
)
xik|k (9.4)
where we used the property of the left and right Jacobians defined in equation (3.7). The
error is a tangent vector at the identity element of the state’s Lie group, and the Jacobians
are mapping the error states to the same tangent space so that they can be added together.
Under the assumption that the error states are independent, the mean and covariance
of the error is
E[eijk]= eijk|k,
cov(eijk)= JGx
l
(
eijk|k
)
P ik|k
(
JGxl
(
eijk|k
))⊤
+ JGxr
(
eijk|k
)
P jk|k
(
JGxr
(
eijk|k
))⊤
= P ijk|k. (9.5)
131

The probability that the two tracks represent the same target is the probability that the
error is zero;
p(eijk = 0
)≈ η exp
(
−1
2
(
eijk − eijk|k
)⊤ (
P ijk|k
)−1 (
eijk − eijk|k
))
= η exp
(
−1
2
(
eijk|k
)⊤ (
P ijk|k
)−1
eijk|k
)
. (9.6)
Using the probability that the error is zero, we define the metric
dT
(
T ik|k, T j
k|k
)
=(
eijk|k
)⊤ (
P ijk|k
)−1
eijk|k, (9.7)
which has a chi-squared distribution of dimension n where n is the dimension of the state.
The smaller the value of the metric is, the more probable that the two tracks represent the
same target.
9.2 Track-to-Track Fusion
Let T = a, b, . . . , n denote the indexing set of tracks to be fused. The objective
of track-to-track fusion is to use the tracks’ state estimates and error covariances to find a
new state estimate and error covariance that maximizes the joint probability of each track.
This is done by forming geodesics from one track’s state estimate xak|k to all of the other
tracks’ state estimates xℓk|k where ℓ ∈ T/a. By forming all of the geodesics to start at the
point xak|k, we ensure that all of the corresponding tangent vectors that form the geodesics
are in the same tangent space. This allows us to weigh each tangent vector according the
relative probability of each state estimate and add them together. We denote the weighted
tangent vector from xak|k to xℓk|k as µ
ℓak|k, and the sum of the weighted tangent vectors as µ−
k|k.
This fused tangent vector moves xak|k to the optimal state as discussed in Lemma 9.2.1 and
depicted in Fig. 9.2.
132

Figure 9.2: A depiction of the track fusion process. The state estimate of the ℓth track to be fusedis denoted xℓk|k and represented as a green dot on the manifold. The weighted tangent vector from
the state estimate xak|k to the ℓth track is denoted µℓak|k and represented as red arrows in the tangent
space. The fused tangent vector is denoted µ−k|k, and the resulting state estimate is denoted xk|k.
Lemma 9.2.1. We suppose directly that tracks are independent and that T = a, b, . . . , ndenotes the indexing set of tracks that represent the same target and are to be fused together,
then the value of the state xk ∼ N(xk|k, Pk|k
)that maximizes the joint probability
p
(⋂
ℓ∈T
xℓk|k | xk)
= η exp
(
−1
2X⊤Σ−1X
)
, (9.8)
where
X =
LogGxI
((
xak|k
)−1
xk
)
LogGxI
((
xbk|k
)−1
xk
)
...
LogGxI
((
xnk|k
)−1
xk
)
133

and Σ = cov(
X)
= diag(
P ak|k, P
bk|k, . . . , P
nk|k
)
is
xk|k = xak|kExpGxI
(
µ−k|k
)
Pk|k = JGxr
(
µ−k|k
)
P−k|kJ
Gxr
(
µ−k|k
)⊤
.
where
P−k|k =
(∑
ℓ∈T
JGx−1
r
(eℓak|k)⊤ (
P ℓk|k
)−1JGx
−1
r
(eℓak|k)
)−1
(9.9)
eℓak|k = LogGxI
((xℓk|k)−1
xak|k
)
(9.10)
µ−k|k =
∑
ℓ∈T
µℓak|k (9.11)
µℓak|k = −P−k|kJ
Gx−1
r
(eℓak|k)⊤ (
P ℓk|k
)−1eℓak|k (9.12)
and JGx−1
r is the inverse of the right Jacobian defined in equation (3.6).
Proof. Let xℓk|k and P ℓk|k denote the state estimate and error covariance of the ℓth ∈ T track
at time k conditioned on the measurements up to time k. Also, let xk denote the target’s
state with the relation xk = xℓk|kExpGxI
(
xℓk|k
)
for ℓ ∈ T. To simplify notation, we will drop
the subscripts indicating the dependency on time.
We are interested in maximizing the joint probability in equation (9.8) by finding the
value of x that maximizes it given the state estimates and error covariances of the tracks
in T. We do this by minimizing its negative log likelihood under the assumption that the
error states are independent (i.e. E[(xi)⊤xj] = 0 for i, j ∈ T and i = j. This simplifies the
optimization problem to
argminx
∑
ℓ∈T
(
LogGxI
((xℓ)−1
x)⊤ (
P ℓ)−1
LogGxI
((xℓ)−1
x))
. (9.13)
To pose the optimization problem in a single tangent space we set x = xaExpGxI (xa) and find
the value of xa that minimizes the optimization problem. This is done by approximating
LogGxI
((xℓ)−1
x)
as
134

LogGxI
((xℓ)−1
x)
= LogGxI
((xℓ)−1
xaExpGxI (xa)
)
= LogGxI
(ExpGx
I
(eℓa)ExpGx
I (xa))
≈ LogGxI
(
ExpGxI
(
eℓa + JGx−1
r
(eℓa)xa))
= eℓa + JGx−1
r
(eℓa)xa, (9.14)
where eℓa ≜ LogGxI
((xℓ)−1
xa)
, and we used the property of the right Jacobian given in
equation (3.7) under the reasonable assumption that xa is small. Substituting in equation
(9.14) into (9.13) yields
argminxa
∑
ℓ∈T
[(
eℓa + JGx−1
r
(eℓa)xa)⊤ (
P ℓ)−1
(
eℓa + JGx−1
r
(eℓa)xa)]
. (9.15)
Since (9.15) is quadratic in xa, the value of xa that minimizes (9.15) is found by
taking its first partial derivative with respect to xa, setting the derivative to 0, and solving
for xa. We set this value to the mean of xa denoted µ−. The corresponding error covariance,
denoted P−, is the second partial derivative of equation (9.15) with respect to xa. Therefore,
the value of xa and the corresponding error covariance that minimizes (9.15) are
P− =
(∑
ℓ∈T
JGx−1
r
(eℓa)⊤ (
P ℓ)−1
JGx−1
r
(eℓa)
)−1
(9.16)
µ− = −P−∑
ℓ∈T
JGx−1
r
(eℓa)⊤ (
P ℓ)−1
eℓa. (9.17)
At this point, xa = µ− + a− where a− ∼ N (0, P−). To reset the error state to have
zero mean, we add µ− onto xa and adjust the error covariance as follows
x = xaExpGxI
(µ− + a−
)(9.18a)
= xaExpGxI
(µ−)
︸ ︷︷ ︸
x
ExpGxI
JGxr
(µ−)a−
︸ ︷︷ ︸
x
. (9.18b)
135

Therefore, the fused state estimate and error state are
x = xaExpGxI
(µ−)
x ∼ N (µ = 0, P ) ,
where
P = JGxr
(µ−)P−JGx
r
(µ−)⊤. (9.19)
As stated, Lemma 9.2.1 assumes that the error states of the tracks being fused are
independent, which is not true. We make this assumption since the calculation of the cross
covariance is difficult if not impossible otherwise. A method that attempts to approximate
the cross covariance is discussed in [101]. This method can be adapted to Lie groups using
a process similar to Lemma 9.2.1.
When two or more tracks are fused together, G-MTT merges their consensus sets
together, gives the fused track the highest track likelihood and the oldest label from the
tracks used to create the fused track.
136

CHAPTER 10. MEASUREMENT LATENCY
Let xk|0:k/i denote a track’s state estimate at time tk and conditioned on the mea-
surements from the initial time t0 to the current time tk except the measurements at time ti
from sensor sℓ. When working with multiple asynchronous sensors, it is possible to receive
measurements from multiple sensors at time tk denoted ZSk and perform data association,
track propagation and updating to produce the state estimate xk|0:k/i only to later receive
measurements at time tk or a later time from sensor sℓ that were measured at time ti due
to measurement latency. We denote the delayed measurements as Zsℓi . This scenario is
illustrated in Fig. 10.1.
In this chapter we present a way to deal with measurement latency when working with
Lie groups. Our proposed solution is compatible with sequential centralized measurement
fusion, or a hybrid of sequential and parallel centralized measurement fusion where normal
propagation and updating is done using parallel centralized measurement fusion, and dealing
with measurement latency is done using sequential centralized measurement fusion. This
chapter relies heavily on the concepts of Chapter 6 to update the track with the delayed
measurements.
To relate this chapter to previous chapters, let T =(xk|k, Pk|k, ϵk|k, . . .
)denote the
track at the current time conditioned on all of the received measurements, and let ZS0:k/i
denote the set of track associated measurements from the initial time to the current time
excluding the measurements Zsℓi . When we receive the delayed measurements Zsℓ
i we equate
the following
xk|0:k/i = xk|k (10.1a)
Pk|0:k/i = Pk|k (10.1b)
p(
ϵk | Zsℓ0:k/i
)
= p (ϵk | Zsℓ0:k) , (10.1c)
137

to reflect the new information that Zsℓi has not been incorporated into the state estimate
and track likelihood due to latency.
Figure 10.1: A depiction of measurement latency. The black arrow represents the time line with t0denoting the initial time and tk denoting the current time. The state estimate at time tk conditionedon all of the measurements except the ones received at time ti from sensor sℓ is denoted xk|0:k/i.
The set ZStℓ
denotes the set of measurements received at time tℓ, and the set Zsℓti
denotes the setof measurements from sensor sℓ produced at time ti but received at time tk do to measurementlatency.
10.1 Preliminaries
To incorporate the measurements Zsℓi into the track, we need to relate the track’s
current state to a measurement from sensor sℓ taken at time ti. This is done by creating
a new observation function, using the system model defined in equation (4.1). The new
observation function hsℓk:i : Gx ×RGx × R ×RGsℓ→ Gsℓ is defined as
zsℓi = hsℓk:i (xk, qk:i, tk:i, rsℓi )
= hsℓ (f (xk, qk:i, tk:i) , rsℓi ) , (10.2)
where hsℓ is the observation function for sensor sℓ defined in equation (4.1b), f is the state
transition function defined in equation (4.2) and tk:i, qk:i ∼ N (0, Q (tk:i)) and rsℓi ∼ N (0, Rsℓ)
are the time interval from tk to ti, the process noise during the time interval tk:i and the
measurement noise from sensor sℓ at time ti. These terms are defined in Chapter 4.
The target’s state xk can be represented as xk = xkExpGxI (xk) where xk is a small
perturbation. Using the definition of the Taylor series in Subsection 3.4.5 and the affinization
138

process discussed in Section 4.1, the affine observation function of equation (10.2) is
zsℓi ≈ hsℓ (f (xk, 0, tk:i) , 0) ExpGsℓI (Hsℓ
k:ixk +Hsℓk:iqk:i + V sℓ
i rsℓi ) , (10.3)
whereHsℓk:i
= Hsℓ
i Fk:i, andHsℓi , Fk:i and V
sℓi are system model Jacobians defined in Section 4.1
and evaluated at the points ζfk:i = (xk, 0, tk:i) and ζhsℓ = (f (xk, 0, tk:i) , 0).
Let ψ denote a Bernoulli random variable indicating that a measurement is target-
originated. Using the affine observation function in equation (10.3) we approximate two
probabilities: the probability of the measurement zsℓi conditioned on the track’s state xk,
the measurement originating from the target, the track representing the target ϵk, and the
measurements ZS0:k/i, denoted as p
(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
and derived in Lemma 10.1.1; and
the probability of the measurement zsℓi conditioned on it originating from the target, the track
representing the target ϵk, and the measurements ZS0:k/i denoted as p
(
zsℓi | ψ, ϵk, ZS0:k/i
)
and
derived in Lemma 10.1.2.
Lemma 10.1.1. Let Zsℓi denote the set of delayed measurements and let ZS
0:k/i denote the set
of measurements associated to the track from the initial time to the current time excluding
Zsℓi . Given the affine observation function defined in equation (10.3) and Assumption 2.14.,
the Gaussian approximation of p(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
is
p(zsℓi | ψ, ϵk, xk, ZS
0:k/i
)≈ η exp
(
−1
2(νk:i −Hsℓ
k:ixk)⊤ R−1
k:i (νk:i −Hsℓk:ixk)
)
, (10.4)
where
νsℓk:i = LogGsℓI
((zsℓk:i)
−1 zsℓi)
(10.5a)
zsℓk:i = hsℓ (f (xk, 0, tk:i) , 0) (10.5b)
Rk:i = Hsℓk:iQ (tk:i) (H
sℓk:i)
⊤ + V sℓi R
sℓ (V sℓi )⊤ (10.5c)
Hsℓk:i = Hsℓ
i Fk:i, (10.5d)
Rsℓ is the measurement noise covariance, Q (tk:i) is the process noise covariance during the
time interval tk:i and the Jacobians Hsℓi , Fk:i and V
sℓi defined in equation (4.5) and evaluated
139

at the points ζfk:i = (xk, 0, tk:i) and ζhsℓ = (f (xk, 0, tk:i) , 0). The covariances are defined in
Chapter 4.
Proof. From equation (10.3) let
νsℓk:i = LogGsℓI
((zsℓk:i)
−1 zsℓi)
≈Hsℓk:ixk +Hsℓ
k:iqk:i + V sℓi r
sℓi
The expected value and covariance of νsℓk:i using the assumption that the measurement and
process noise are independent and the fact that the measurement is conditioned on the state
xk are
E [νsℓk:i] = Hsℓk:iE [xk] +Hsℓ
k:iE[qk:i] + V sℓi E[rsℓi ]
= Hsℓk:ixk
cov (νsℓk:i) = Hsℓk:icov (qk:i) (H
sℓk:i)
⊤ + V sℓi cov (rsℓi ) (V
sℓi )⊤
= Hsℓk:iQ (tk:i) (H
sℓk:i)
⊤ + V sℓi R
sℓ (V sℓi )⊤ ;
therefore, the Gaussian approximation of p(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
is as defined in equa-
tion (10.4)
Lemma 10.1.2. Let xk|0:k/i = xk|0:k/iExpGxI
(xk|0:k/i
)and Pk,0:k/i denote the tracks current
state and error covariance at time tk conditioned on the measurements ZS0:k/i. We assume
that the probability of the track’s state conditioned on the track representing the target and
the measurements ZS0:k/i is known. This probability is denoted and defined as
p(xk|0:k/i | ϵk, ZS
0:k/i
)= η
(
−1
2x⊤k|0:k/iP
−1k|0:k/ixk|0:k/i
)
. (10.6)
We also suppose directly the assumptions 2.1., 2.3., 2.6.,2.7. and 2.14., and that the Gaus-
sian approximation of p(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
is known and defined in Lemma 10.1.1, then
the probability of the measurement zsℓi conditioned on it being target-originated, the track
140

representing the target and the measurements ZS0:k/i is denoted and defined as
p(zsℓi | ψ, ϵk, ZS
0:k/i
)≈ η exp
(
−1
2(νsℓk:i)
⊤ (Ssℓk:i)−1 νsℓk:i
)
(10.7)
where
νsℓk:i = LogGsℓI
((zsℓk:i)
−1 zsℓi)
(10.8a)
zsℓk:i = hsℓ (f (xk, 0, tk:i) , 0) (10.8b)
Ssℓk:i = Hsℓk:i
(Q (tk:i) + Pk|0:k/i
)(Hsℓ
k:i)⊤ + V sℓ
i Rsℓ (V sℓ
i )⊤ (10.8c)
Hsℓk:i = Hsℓ
i Fk:i, (10.8d)
νsℓk:i is the innovation term, zsℓk:i is the estimated measurement, Sk:i is the innovation co-
variance, Qk:i is the process noise covariance, Rsℓ is the measurement noise covariance,
hsℓ is the observation function, f is the state transition function defined in equation (4.2),
and the Jacobians Hsℓi , Fk:i and V sℓ
i are evaluated at the points ζfk:i = (xk, 0, tk:i) and
ζhsℓ = (f (xk, 0, tk:i) , 0) and are defined in equation (4.5).
Proof. According to the theorem of total probability
p(zsℓi | ψ, ϵk, ZS
0:k/i
)=
∫
xk|0:k/i
p(zsℓi | ψ, ϵk, xk, ZS
0:k/i
)p(xk|0:k/i | ϵk, ZS
0:k/i
)dxk|0:k/i. (10.9)
Using Lemma 10.1.1 for the Gaussian approximation of p(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
and equa-
tion (10.6) for the probability p(
xk|0:k/i | ϵk, ZS0:k/i
)
, the proof is similar to the proof of
Lemma 6.2.2.
10.2 Updating With a Latent Measurements
The update step using the delayed measurements Zsℓi is very similar to the LG-
IPDAF’s update step in Chapter 6.
Lemma 10.2.1. Let Zsℓi =
zsℓi,jm
sℓi
j=1denote the set of delayed, track-associated measure-
ments produced from sensor sℓ at time ti and received at time tk with cardinality msℓi , Z
S0:k/i
141

denote the set of track-associated measurements from the initial time to the current time
excluding the measurements Zsℓi and θsℓi,j denote the association events corresponding to the
measurements Zsℓi as defined in Chapter 6. Also let xk|0:k/i and Pk|0:k/i denote the state es-
timate and the error covariance at time tk conditioned on the measurements ZS0:k/i , and let
p(
ϵk | ZS0:k/i
)
denote the track likelihood at time tk conditioned on ZS0:k/i.
Given the assumptions 2.3., 2.7., 2.9., 2.10., 2.11., 2.12. and 2.14., the updated track
likelihood, state estimate and error covariance that maximizes the a posteriori probability of
the track’s state conditioned on it representing the target and all the measurements are
xk|k = xk|0:k/iExpGxI
(
µsℓ−
k:i|k
)
(10.10)
Pk|k = JGxr
(
µsℓ−
k:i|k
)
P sℓ−
k:i|kJGxr
(
µsℓ−
k:i|k
)⊤
(10.11)
p(ϵk | ZS
0:k
)=
1− αsℓk:i1− αsℓk:ip
(ϵk | Z0:k/i
)p(ϵk | ZS
0:k/i
)(10.12)
where
µsℓ−
k|k = Ksℓk:iν
sℓk:i (10.13a)
νsℓk:i =
msℓi∑
j=1
βsℓk:i,jνsℓk:i,j (10.13b)
νsℓk:i,j = LogGsℓI
((zsℓk:i)
−1 zsℓi,j)
(10.13c)
zsℓk:i = f(xk|0:k/i, 0, tk:i
)(10.13d)
Ksℓk:i = Pk|0:k/i (H
sℓk:i)
⊤ (Ssℓk:i)−1 (10.13e)
Ssℓk:i = Hsℓk:i
(Q (tk:i) + Pk|0:k/i
)(Hsℓ
k:i)⊤ + V sℓ
i Rsℓ (V sℓ
i )⊤ (10.13f)
Hsℓk:i = Hsℓ
i Fk:i (10.13g)
P sℓ,c−
k:i|k = (I −Ksℓk:iH
sℓk:i)Pk|0:k/i (10.13h)
P sℓk:i|k = Ksℓ
k:i
msℓi∑
j=1
βsℓk:i,jνsℓk:i,j
(νsℓk:i,j
)⊤ − νsℓk:i (νsℓk:i)
⊤
(Ksℓk:i)
⊤ (10.13i)
P sℓ−
k:i|k = βsℓk:i,0Pk|0:k/i +(1− βsℓk:i,0
)P sℓ,c
−
k:i|k + P sℓk:i|k (10.13j)
142

βsℓk:i,j =
Lsℓk:i,j
1−PsℓD P
sℓG +
∑msℓi
j=1 Lsℓk:i,j
j = 1, . . . ,msℓi
(1−P sℓG P
sℓD )
1−PsℓD P
sℓG +
∑msℓi
j=1 Lsℓk:i,j
j = 0,
(10.13k)
Lsℓk:i,j =P sℓ
λp(zsℓi,j | ψ, ϵk, ZS
0:k/i
)(10.13l)
αsℓk:i =
P sℓD P
sℓG if msℓ
i = 0
P sℓD P
sℓG −∑m
sℓi
j=1 Lsℓk:i,j else
, (10.13m)
and the Jacobians Hsℓi , Fk:i and V
sℓi are evaluated at the points ζfk:i = (xk, 0, tk:i) and ζhsℓ =
(f (xk, 0, tk:i) , 0) and defined in equation (4.5).
Proof. By substituting in the probability p(
zsℓi | ψ, ϵk, xk, ZS0:k/i
)
defined in equation (10.4)
for p (zk | ψ, ϵk− , xk− , Z0:k−) defined in Lemma 6.3.2, the probability p(
xk | ϵk, ZS0:k/i
)
de-
fined in equation (10.6) for p (xk | ϵk, Z0:k−) defined in equation (6.10), the probability
p(
zsℓi | ψ, ϵk, ZS0:k/i
)
defined in equation (10.7) for p (zsℓk | ψ, ϵk, Z0:k−) defined in equation
(6.16), the set ZS0:k/i for Z0:k− , and the measurement zsℓi for zk, the proof follows directly
from Theorem 6.4.1.
Jacobians capture the behavior of functions locally. The larger the time interval tk:i is,
the larger the perturbations xk and qk:i will be, and the less accurate the affine observation
function in equation (10.3) will be. This implies that the larger the time interval tk:i is,
the less accurate the update step will be. This statement is under the assumption that the
observation function in non-linear since in the linear case the Jacobians capture the global
behavior of functions perfectly.
143

CHAPTER 11. END-TO-END MTT FRAMEWORK
In this chapter we present an end-to-end target tracking and following architecture for
unmanned aerial vehicles (UAVs) that track ground-based objects using a fixed monocular
camera, an inertial measurement unit (IMU), an on-board computer, a flight control unit,
and a sensor to measure altitude. An illustration of the target tracking scenario is shown in
Fig. 11.1.
Ground plane
Figure 11.1: A depiction of the target tracking scenario where the target is moving on the groundand is being tracked by a monocular camera mounted on a UAV. The black dashed lines representthe camera’s field of view and the orange arrow represents the line of sight vector from the camerato the target.
Any vision-based target tracking method will need to extract measurements from the
images. Recently, there has been extensive research in object detection and identification
using deep neural networks such as YOLO [102], R-CNN [103] and others [104]. These
methods achieve high accuracy but are computationally expensive. We discuss other methods
in Section 11.2.
144

To follow the detected and tracked targets, a control approach known as image based
visual servoing (IBVS) is commonly implemented [105]. IBVS in its most basic form is im-
plemented using the proportional-integral-derivative controller (PID) [106] which is simple
to implement and responsive but causes increased error and overshoot due to UAV rota-
tions [107]. The IBVS-Sphere (IBVS-Sph) effectively combats this problem by mapping the
image plane to a virtual spherical image plane around the camera; however, this and similar
spherical mapping techniques become unstable as the target moves beneath the UAV [107].
Another solution is to map a virtual image plane parallel to the ground directly above the
detected targets. This reduces error due to the UAV’s pose and discrepancies caused by
spherical mapping. A few examples of this approach, such as the desired robust integral of
the sign of error (DCRISE), are [108], [109]. The controller algorithm described in this paper
takes advantage of this mapping of a virtual image plane and will be discussed in more detail
in Section 11.5.
This chapter is based on the work in [110], which uses the original Recursive-RANSAC
(R-RANSAC) algorithm presented in [63] to track targets. In Chapter 12 we show how to
use G-MTT instead of R-RANSAC in the end-to-end MTT framework to track targets on
SE (2).
The rest of this chapter is organized as follows. In Section 11.1 we present the tracking
and following architecture followed by the visual front end, R-RANSAC, and the controller in
Sections 11.2, 11.3 and 11.5. Finally we discuss our results and conclusions in Sections 11.6
and 11.7.
11.1 Architecture
In this chapter we assume that a monocular camera is rigidly mounted on a multirotor
equipped with IMU, on-board computer, autopilot, and an altitude sensor. The camera sends
images into the visual front-end algorithm. The visual front-end algorithm is responsible for
extracting point measurements of targets from the images and computing the homography
and essential matrices, as shown in Fig. 11.2.
The visual front-end produces point measurements that are processed by the tracking
algorithm, labeled R-RANSAC in Fig. 11.2, which produces tracks of targets. Target tracking
145

is done in the image frame on the image plane which requires transforming measurements
and tracks expressed in the previous image plane to the current image plane at the UAV
moves. This R-RANSAC configuration is sensor mode one as discussed in Chapter 2.
Since we assume that the target is moving on fairly planar ground, the scene ob-
served by the camera is planar. This allows us to use the homography to transform the
measurements and tracks to the current image frame as shown in Fig. 11.2.
The multiple target tracking algorithm R-RANSAC sends the tracks to the track
selector which determines which track to follow. The selected track is then passed to the
controller which sends commands to the flight control unit (FCU) that enables target fol-
lowing, as shown in Fig. 11.2.
Multirotor
Controller
Track Selector
Acceleration and Yaw
Rate
Commands
Tracks to follow
Moving/non-moving Segmentation
Estimate Essential Matrix
Estimate Homography
KLT Feature Tracker
•••
Other Measurement
Extractors
Measurement Extractors
Feature Pair
Homography
Measurements
Visual Front End
Visual MTT
Transform measurements and
tracks to current
camera frame
Initialize Tracks
Manage Tracks
R-RANSAC
Images
Tracks
Figure 11.2: Target tracking and following architecture.
11.2 Visual Front End
This section describes the visual front-end shown in Fig. 11.2. Images from the
camera along with the camera’s intrinsic parameters are given to the visual front-end, which
is responsible for producing measurements and calculating the homography and essential
146

matrix. The visual front end uses a variety of algorithms to extract features. Some of
the algorithms we have used include image differencing, color segmentation, YOLO, and
apparent feature motion methods to extract measurements.
The image difference method finds the difference between two images, looks for dis-
parities of certain shapes and sizes (blobs) which are caused by moving objects and takes the
center of the blobs as measurements. When the camera is moving, we use the homography
to transform one image into the frame of the other image to take the difference between the
images. The color segmentation method looks for blobs with specific color, size, and shape
profile to extract point measurements. This method assumes that the target of interest is a
unique color and is in general not useful except in simple controlled environments.
The method that we use to extract measurements is called apparent feature motion
and is described in the remainder of this section and is shown graphically in Fig. 11.2. In
particular, the KLT feature tracker extracts matching points between consecutive images.
Using the matching points, the homography and essential matrix are computed. The match-
ing points that are outliers to the homography and essential matrix are considered moving
and given to the tracking algorithm. To help describe the apparent motion algorithm we
will consider the scenario of tracking a car using a monocular camera fixed to a UAV as
illustrated in Fig.11.3.
Figure 11.3: A depiction of tracking a car using a monocular camera fixed to a UAV.
147

11.2.1 KLT Feature Tracker
To compute the homography matrix, the essential matrix and to calculate apparent
feature motion, good features need to be tracked between consecutive frames. A common
and popular method is to use Good Features to Track [111] to select good features from the
previous image and find their corresponding features in the current image using the Kanade-
Lucas-Tomasi (KLT) feature tracker [112], [113]. The combination of the two algorithms
yields matching features. These algorithms can be implemented using the OpenCV functions
goodFeaturesToTrack() and calcOpticFlowPyrLK() [114]. An illustration of how these
algorithms work to find matching features is shown in Fig. 11.4.
11.2.2 Estimate Homography
The homography describes the transformation between image frames and maps static
features from one image to static features in the other image provided that the image scene
is planar. The matching features obtained from the KLT Tracker are used to estimate the
homography. The relevant geometry of the Euclidian homography is shown in Fig. 11.5.
Suppose that pf is a feature point that lies on a plane defined by the normal (unit)
vector n. Let paf/a and pbf/b be the position of pf relative to frames a and b, expressed in
those frames respectively. Then as shown in Fig. 11.5 we have
pbf/b = Rbap
af/a + pba/b,
where Rba denotes the rotation between frames and pba/b denotes the translation between
frames.
Let da be the distance from the origin of frame a to the planar scene, and observe
that
da = n⊤paf/a =⇒n⊤paf/ada
= 1.
Therefore, we get that
pbf/b =
(
Rba +
pba/bda
n⊤
)
paf/a. (11.1)
148

(a) The algorithm good features to track findsfeatures to track. These features are representedas red dots.
(b) A depiction of the car moving and the cam-era rotating. Note how the scene is rotatedand translated as compared to the scene inFig. 11.4a.
(c) The KLT feature tracker finds matching points between the previous image frame and thecurrent image frame. The matching points in the current image frame are represented as greendots.
Figure 11.4: A depiction showing how the food features to track and the KLT feature tracker workto find matching points.
Let paf/a = (pxa, pya, pza)⊤, pbf/b = (pxb, pyb, pzb)
⊤ and ϵaf/a = (pxa/pza, pya/pza, 1)
⊤ represent
the normalized homogeneous coordinates of paf/a projected onto image plane a, and similarly
for ϵbf/b. Then Equation (11.1) can be written as
pzbpza
ϵbf/b =
(
Rba +
pba/bda
n⊤
)
ϵaf/a. (11.2)
149

εaf
<latexit sha1_base64="eNnw7dtuoVVchBbAXZzPDKO5bMg=">AAACdnicbVDLahRBFK1pH4ntIxN1F9DGIehChu4QUFcJuHGZgJMEptqhuvr2TDH1aKpuJw6VXuY3/AG3+jH+gv5AdrFmJkgeXijqcO653HNPUUvhME1/daI7d+/dX1l9ED989PjJWnf96YEzjeUw4EYae1QwB1JoGKBACUe1BaYKCYfF9OO8f3gM1gmjP+OshlyxsRaV4AwDNeq+pAWznhZGlm6mwucp1E5Io9t2VH1ho24v7aeLSm6D7BL0di66v7/pP/XeaL2zQ0vDGwUauWTODbO0xtwzi4JLaGPaOKgZn7IxDAPUTIHL/eKSNtkMTJlUxoanMVmwVyc8U27uMygVw4m72ZuT/+sNG6ze517oukHQfLmoamSCJpnHkpTCAkc5C4BxK4LXhE+YZRxDePH1NXJsgmKiBH/7D4e7NJxwoxTTpafaWNUOs9xTCRXS015GrRhPAgpCC1elCF/xRJTBt98Suo3jEHl2M+Db4GCrn233P+ynvd3nZFmrZIO8Im9IRt6RXfKJ7JEB4eSMfCc/yM/OefQi2oxeL6VR53LmGblWUfoXDuXHlw==</latexit>
paf/a
<latexit sha1_base64="inliH+e8VEVF9vqxNseOAqms2I0=">AAACa3icbVDLbtNAFJ2YVzGvlJYNsLCIKrFAwa6QCisqsWFZJNJWik10Pb5ORp2HNXPdkg7+F7bwI3wDH8EWtkySCvXBkUY6Ovdc3TOnbKRwlKY/e9G16zdu3lq7Hd+5e+/+g/76w31nWstxxI009rAEh1JoHJEgiYeNRVClxIPy6N1ifnCM1gmjP9K8wULBVItacKAgTfqbuQKalbVvuomvX0L3yUM36Q/SYbpEcpVkZ2SwGz3yP/6c/t6brPfe5pXhrUJNXIJz4yxtqPBgSXCJXZy3DhvgRzDFcaAaFLrCL+N3yVZQqqQ2NjxNyVI9v+FBOTdXZXAuwrrLs4X4v9m4pfp14YVuWkLNV4fqViZkkkUXSSUscpLzQIBbEbImfAYWOIXG4otn5NQEx0wJ/uIfD//SeMKNUqArn2tjVTfOCp9LrCn/MshyK6azwILR4nkr4Wc6EVXI7beF7uI4VJ5dLvgq2d8eZq+Gbz6E7jfZCmvsCXvGnrOM7bBd9p7tsRHj7JR9Zd/Y996vaCN6HD1dWaPe2c4Gu4Bo6y+4VMHW</latexit>
pbf/b
<latexit sha1_base64="OKMzj53bf8R2cPhn4N1akIMq1Xk=">AAACa3icbVDLbtNAFJ0YKMUtbUrKBrqwGlVigVK7QiqsqMSGZZFIWyl2o/H4OhllHtbMdUsy+F/Ywo/wDXwEW9gySSrU15FGOjr3XN0zJ68EtxjHv1rBg4ePVh6vPgnX1p9ubLa3np1YXRsGfaaFNmc5tSC4gj5yFHBWGaAyF3CaTz7M56cXYCzX6jNOK8gkHSleckbRS8P2diopjvPSVc3Qlft5c+7yZtjuxr14geguSa5I9yh47n7+nf05Hm613qeFZrUEhUxQawdJXGHmqEHOBDRhWluoKJvQEQw8VVSCzdwifhPteaWISm38Uxgt1OsbjkprpzL3znlYe3s2F++bDWos32aOq6pGUGx5qKxFhDqadxEV3ABDMfWEMsN91oiNqaEMfWPhzTNipL1jLDl7/Z/7fym4ZFpKqgqXKm1kM0gylwooMf3aTVLDR2PPvNHAdSvCF7zkhc/tDrhqwtBXntwu+C45Oeglb3rvPvnut8kSq+Ql2SWvSEIOyRH5SI5JnzAyI9/Id/Kj9TvoBC+CnaU1aF3tdMgNBHv/ALw+wdg=</latexit>
pf
<latexit sha1_base64="/gAZxVa7/adfF7ExLMwLSfZ0Rfc=">AAACYXicbVDLSuRAFK3O+IyOto+dm2AzMIuhSURQVwrOQlcq2Cp0QlOp3HQXXY9QdTNOE/Mbsx1/a9bjP7i1ulvE14GCw7nnck+dtBDcYhj+a3hfZmbn5hcW/aXlryurzbX1K6tLw6DDtNDmJqUWBFfQQY4CbgoDVKYCrtPh8Xh+/QuM5Vpd4qiARNK+4jlnFJ0Ux5LiIM2rou7lvWYrbIcTBB9J9Exah4+nD2f3Fz/Pe2uNwzjTrJSgkAlqbTcKC0wqapAzAbUflxYKyoa0D11HFZVgk2oSug6+OSULcm3cUxhM1NcbFZXWjmTqnOOQ9v1sLH4265aY7ycVV0WJoNj0UF6KAHUwbiDIuAGGYuQIZYa7rAEbUEMZup78t2dEXzvHQHL244W7fym4ZVpKqrIqVtrIuhslVSwgx/iuFcWG9weOOaOB11aE33jLM5e72uGq9n1XefS+4I/kaqcd7bYPLsLW0SaZYoFskW3ynURkjxyRE3JOOoSRgvwhf8l947+36DW99anVazzvbJA38LaeAF2bvf0=</latexit>
εbf
<latexit sha1_base64="m5UUEeBy+Zw0dtI5tREPDdifMmQ=">AAACdnicbVDLahRBFK1pH4ntIxN1F9DGIehChu4QUFcJuHGZgJMEptqhuvr2TDH1aKpuJw6VXuY3/AG3+jH+gv5AdrFmJkgeXijqcO653HNPUUvhME1/daI7d+/dX1l9ED989PjJWnf96YEzjeUw4EYae1QwB1JoGKBACUe1BaYKCYfF9OO8f3gM1gmjP+OshlyxsRaV4AwDNeq+pAWznhZGlm6mwucp1E5Io9t2VH0pRt1e2k8XldwG2SXo7Vx0f3/Tf+q90Xpnh5aGNwo0csmcG2ZpjblnFgWX0Ma0cVAzPmVjGAaomQKX+8UlbbIZmDKpjA1PY7Jgr054ptzcZ1AqhhN3szcn/9cbNli9z73QdYOg+XJR1cgETTKPJSmFBY5yFgDjVgSvCZ8wyziG8OLra+TYBMVECf72Hw53aTjhRimmS0+1saodZrmnEiqkp72MWjGeBBSEFq5KEb7iiSiDb78ldBvHIfLsZsC3wcFWP9vuf9hPe7vPybJWyQZ5Rd6QjLwju+QT2SMDwskZ+U5+kJ+d8+hFtBm9XkqjzuXMM3KtovQvENfHmA==</latexit>
Rb
a
<latexit sha1_base64="3GNifb2xHIVe+8w90pBh3dZD9bU=">AAACWnicbZDbSuRAEIZ74mE1ng93exMdFrzQIZEFFQQFb7zUxVFhkh06ncpMYx9Cd0Ud4jyDt7uPpvgYPoA9MyKeCgo+/vqLOqSF4BbD8KHmjY1PTP6YmvZnZufmFxaXls+tLg2DJtNCm8uUWhBcQRM5CrgsDFCZCrhIr44G9YtrMJZrdYa9AhJJO4rnnFF0UvNPm/5N24v1sBEOI/gK0SvUD5630t3H/bWT9lLtIM40KyUoZIJa24rCApOKGuRMQN+PSwsFZVe0Ay2HikqwSTXcth/8ckoW5Nq4VBgM1fcdFZXW9mTqnJJi136uDcTvaq0S892k4qooERQbDcpLEaAOBqcHGTfAUPQcUGa42zVgXWooQ/cg/+MY0dHO0ZWcbb6xu0vBDdNSUpVVsdJG9ltRUsUCcozv6lFseKfryBkNvLci3OINz9ze1TZXfd93L48+P/grnG83ot+NvdOwfrhKRjFFfpJ1skEiskMOyTE5IU3CCCf35B/5X3vyPG/amxlZvdprzwr5EN7qC9cTudg=</latexit>
Fa
<latexit sha1_base64="WLOWj+wHQy8NBW5qZvYOCGBsBUo=">AAACYnicbVBNaxRBEO0dNcaJmqzxpofBJeBBlpkgqKcEApJjBDcJ7AxLTU/NbpP+GLtrjMs4v8NrzN/IX8gfCF49+DPs/VBiYkHDq1evqNcvr6RwFMdXneDO3Xsr91cfhGsPHz1e3+g+OXSmthwH3Ehjj3NwKIXGAQmSeFxZBJVLPMpP9mbzo89onTD6I00rzBSMtSgFB/JUliqgCQfZvG9HMNroxf14XtFtkCxBb+fX5fkPuFg5GHU7O2lheK1QE5fg3DCJK8oasCS4xDZMa4cV8BMY49BDDQpd1sxdt9GWZ4qoNNY/TdGcvb7RgHJuqnKvnLl0N2cz8n+zYU3l26wRuqoJNV8cKmsZkYlmEUSFsMhJTj0AboX3GvEJWODkgwr/PSPHxismSvBXf7H/l8ZTbpQCXTSpNla1wyRrUoklpV97SWrFeOKRF1q8LiX8Qqei8L6bbaHbMPSRJzcDvg0Ot/vJ6/67D3Fv9ylb1Cp7xl6wlyxhb9gu22cHbMA4+8S+sTP2vfMzCINusLmQBp3lzrL/U8Hz3yZWvus=</latexit>
Fb
<latexit sha1_base64="EJiKLG6Z+k/WTqScJR2seJg1qX0=">AAACYnicbVBNaxRBEO0dNcaJmqzxpofBJeBBlpkgqKcEApJjBDcJ7AxLTU/NbpP+GLtrjMs4v8NrzN/IX8gfCF49+DPs/VBiYkHDq1evqNcvr6RwFMdXneDO3Xsr91cfhGsPHz1e3+g+OXSmthwH3Ehjj3NwKIXGAQmSeFxZBJVLPMpP9mbzo89onTD6I00rzBSMtSgFB/JUliqgCQfZvG9H+WijF/fjeUW3QbIEvZ1fl+c/4GLlYNTt7KSF4bVCTVyCc8MkrihrwJLgEtswrR1WwE9gjEMPNSh0WTN33UZbnimi0lj/NEVz9vpGA8q5qcq9cubS3ZzNyP/NhjWVb7NG6Kom1HxxqKxlRCaaRRAVwiInOfUAuBXea8QnYIGTDyr894wcG6+YKMFf/cX+XxpPuVEKdNGk2ljVDpOsSSWWlH7tJakV44lHXmjxupTwC52KwvtutoVuw9BHntwM+DY43O4nr/vvPsS93adsUavsGXvBXrKEvWG7bJ8dsAHj7BP7xs7Y987PIAy6weZCGnSWO8v+TwXPfwMoSL7s</latexit>
pba/b
<latexit sha1_base64="8DP+b5D6jHjIOVXQ/QzdepwVYMA=">AAACa3icbVDLbtNAFJ0YKMUtbUrKBrqwGlVigVK7QiqsqMSGZZFIWyl2o/H4OhllHtbMdUsy+F/Ywo/wDXwEW9gySSrU15FGOjr3XN0zJ68EtxjHv1rBg4ePVh6vPgnX1p9ubLa3np1YXRsGfaaFNmc5tSC4gj5yFHBWGaAyF3CaTz7M56cXYCzX6jNOK8gkHSleckbRS8P2diopjvPSVc3Q0f28OXd5M2x34168QHSXJFekexQ8dz//zv4cD7da79NCs1qCQiaotYMkrjBz1CBnApowrS1UlE3oCAaeKirBZm4Rv4n2vFJEpTb+KYwW6vUNR6W1U5l75zysvT2bi/fNBjWWbzPHVVUjKLY8VNYiQh3Nu4gKboChmHpCmeE+a8TG1FCGvrHw5hkx0t4xlpy9/s/9vxRcMi0lVYVLlTayGSSZSwWUmH7tJqnho7Fn3mjguhXhC17ywud2B1w1YegrT24XfJecHPSSN713n3z322SJVfKS7JJXJCGH5Ih8JMekTxiZkW/kO/nR+h10ghfBztIatK52OuQGgr1/smHB0w==</latexit>
da
<latexit sha1_base64="0DgAbAJKSXs2rxAXtp3tlp1e7P4=">AAACdnicbZHLahRBFIZrWo2xvSRRd4I0DkEXMnQHQV0ZcOMyopMEppvhdPXpniJ1aapOG4eyH8Gt7n0NX8EXEF/AR3BpzUyQZOKBgo///FXnUmUrhaM0/TmIrly9tnF980Z889btO1vbO3cPneksxzE30tjjEhxKoXFMgiQetxZBlRKPypPXi/zRB7ROGP2e5i0WChotasGBgvSumsJ0e5iO0mUklyE7g+Gr3z++/YLvGwfTnUGRV4Z3CjVxCc5NsrSlwoMlwSX2cd45bIGfQIOTgBoUusIve+2T3aBUSW1sOJqSpXr+hgfl3FyVwamAZm49txD/l5t0VL8ovNBtR6j5qlDdyYRMshg8qYRFTnIeALgVodeEz8ACp7Ce+GIZ2ZjgmCnBn/7jMJfGU26UAl35XBur+klW+FxiTfmnYZZb0cwCBaPF81bCj3QqqtC33xN67Z22rHufL8Ypa9/2fRyHD8nW138ZDvdG2bPRy7fpcP8+W8Ume8AesScsY8/ZPnvDDtiYcdawz+wL+zr4Ez2MdqPHK2s0OLtzj12IKP0L5ATHdA==</latexit>
db
<latexit sha1_base64="wk2mdBK/TpS0ZLJPx8Jqm2FnaWw=">AAACdnicbZHLShxBFIZrOtFoJ/GSuAuExkHMQoZuCZisImTjUklGhelmqK4+3VNYl6bqtGao9CNkm+zzGnkFX0B8AR8hy9TMSNDRAwUf//mrzqXyWnCLcXzVCZ48XVh8trQcPn/xcmV1bf3VsdWNYdBnWmhzmlMLgivoI0cBp7UBKnMBJ/nZ50n+5ByM5Vp9xXENmaSV4iVnFL30pRjmw7Vu3IunET2E5Ba6n24uf1/TP4uHw/VOlhaaNRIUMkGtHSRxjZmjBjkT0IZpY6Gm7IxWMPCoqASbuWmvbbTllSIqtfFHYTRV795wVFo7lrl3SoojO5+biI/lBg2WHzLHVd0gKDYrVDYiQh1NBo8KboChGHugzHDfa8RG1FCGfj3h/TKi0t4xkpzt/Gc/l4ILpqWkqnCp0ka2gyRzqYAS0+/dJDW8GnnyRgN3rQjf8IIXvm+3y9XcO3Veti6djJOXrm7bMPQfksyv/yEc7/aS972PR3F3f4PMYom8IZvkHUnIHtknB+SQ9AkjFflBfpJfnb/B22Ar2J5Zg87tndfkXgTxP+YUx3U=</latexit>
n
<latexit sha1_base64="Im4Jcf9M1Mt4JKe6z9b5aTWfghQ=">AAACfXicbVFdS9xAFJ2N2mqqrVrffAldBB9kSaRgfVLwxUeFroqbIJPJze7gfISZG3UZ8y98UWj/V3+Nnd1V0dUDA4dzz537lVeCW4zjf61gZnbu0+f5hfDL4tLXb8srqydW14ZBl2mhzVlOLQiuoIscBZxVBqjMBZzmlwej+OkVGMu1+o3DCjJJ+4qXnFH00nkqKQ7y0qnmYrkdd+IxovckeSLtvfsxHo4uVlpZWmhWS1DIBLW2l8QVZo4a5ExAE6a1hYqyS9qHnqeKSrCZG7fcRBteKaJSG/8URmP1dYaj0tqhzL1z1KKdjo3Ej2K9GstfmeOqqhEUmxQqaxGhjkbzRwU3wFAMPaHMcN9rxAbUUIZ+S+HbMqKvvWMgOdt64X4uBddMS0lV4VKljWx6SeZSASWmt+0kNbw/8MwbDby2ItzgNS98326bq6l/qrxs3PM1qqYJQ3+QZHr978nJdif52dk9jtv7a2SCebJOfpBNkpAdsk8OyRHpEkYUuSN/yN/WY7ARbAWdiTVoPeV8J28Q7PwHB5zKpw==</latexit>
planar scene
Figure 11.5: The geometry for the derivation of the homography matrix between two camera poses.
Defining the scalar γf = pzb/pza we get
γfϵbf/b = Hb
aϵaf/a, (11.3)
where
Hba
=
(
Rba +
pba/bda
n⊤
)
(11.4)
is called the Euclidian homography matrix between frames a and b [115]. Equation (11.3)
demonstrates that the Euclidian homography matrix Hba transforms the normalized homo-
geneous pixel location of p in frame a into a homogeneous pixel location of p in frame b.
The scaling factor γ, which is feature point dependent, is required to put ϵb in normalized
homogeneous coordinates, where the third element is unity.
The homography can be calculated using the openCV function findHomography(),
which combines a 4-point algorithm with a RANSAC [60], [116] process to find the homog-
raphy matrix that best fits the data. The findHomography() function scales the elements of
H so that the (3, 3) element is equal to one. Feature pairs that do not satisfy Equation (11.3)
are labeled as features that are potentially moving in the environment.
150

Applying the homography to the scenario in Fig. 11.4c transforms the measurements
from the previous image (represented as red dots) to the current image that contains the
matching features (represented as green dots) as illustrated in Fig. 11.6. Note that the
features corresponding to moving objects are not mapped to their counterpart feature using
the homography, and that there is a distance between them. This illustrates that we can
detect moving features by finding outliers to the homography.
Figure 11.6: A depiction of applying the homography to the scenario in Fig. 11.4c where thehomography transforms the measurements from the previous image (represented as red dots) tothe current image that contains the matching features (represented as green dots).
11.2.3 Estimate Essential Matrix
The homography works well to segment between moving and non-moving features
provided that the scene is planar; however, that is rarely the case due to trees, lamp posts,
and other objects that stick out of the ground. The objects that do not lie on the same
plane used to describe the homography will be outliers to the homography and appear as
moving features even if they are static. The essential matrix provides a strategy to filter out
the static features using the epipolar constraint.
Fig. 11.7 shows the essence of epipolar geometry. Let pf be the 3D position of a
feature point in the world, and let paf/a be the position vector of the feature point relative
to frame Fa expressed in frame Fa, and similarly for pbf/b.
151

Figure 11.7: Epipolar geometry.
The relationship between paf/a and pbf/b is given by
pbf/b = Rbap
af/a + pba/b. (11.5)
Multiplying both sides of Equation (11.5) on the left by[
pba/b
]
3×gives
[pba/b
]
3×pbf/b =
[pba/b
]
3×Rbap
af/a,
where [·]3× is defined in equation (C.12). Since[
pba/b
]
3×pbf/b = pba/b×pbf/b must be orthogonal
to pbf/b we have that
pb⊤f/b[pba/b
]
3×Rbap
af/a = 0. (11.6)
Dividing Equation (11.6) by the norm of pba/b, and defining
tba/b=
pba/b∥∥∥pba/b
∥∥∥
gives
pb⊤f/b[tba/b]
3×Rbap
af/a = 0. (11.7)
The matrix
Eba =
[tba/b]
3×Rba (11.8)
152

is called the essential matrix and is completely defined by the relative pose (Rba,p
ba/b). Di-
viding Equation (11.7) by the distances to the feature in each frame gives
ϵb⊤f/b E
ba ϵ
af/a = 0, (11.9)
where ϵaf/a and ϵ
bf/b are the normalized homogeneous image coordinates of the feature in
frame a (respectively frame b). This equation is the epipolar constraint and serves as a
constraint between static point correspondences. The epipoles ea and eb shown in Fig. 11.7
are the intersection of the line connecting Fa and Fb with each image plane. The epipolar
lines ℓa and ℓb are the intersection of the plane (Fa,Fb, Pf ) with the image planes. The
epipolar constraint with the pixel ϵaf/a is satisfied by any pixel on the epipolar line ℓb. In
other words, if Pf is a static feature or its motion is along the epipolar line then its point
correspondence ϵaf/a and ϵ
bf/b will satisfy the epipolar constraint [117].
The essential matrix can be calculated using the openCV function findEssentialMat
which uses the five point Nister algorithm [118] coupled with a RANSAC process.
11.2.4 Moving / Non-moving Segmentation
This section describes the “Moving / non-moving Segmentation” block shown in
Fig. 11.2. The purpose of this block is to segment the tracked feature pairs into those
that are stationary in the environment, and those that are moving relative to the environ-
ment. As shown in Fig. 11.2, the inputs to the “Moving / non-moving Segmentation” block
at time k are the homography Hkk−1, the essential matrix Ek
k−1, and the set of matching
feature points Mk = (ϵki , ϵk−1i ) between image Ik−1 and image Ik.
When the camera is mounted on a moving UAV observing a scene where most of
the objects in the scene are not moving, the homography computed from planar matching
features will correspond to the motion of the UAV. As previously stated, moving objects or
static objects not coplanar with the features used to compute the homography will appear
to have motion when their corresponding features from the previous image are mapped to
the current image. Therefore, given the set of matching feature points Mk, we can segment
153

Mk into two disjoint sets Mink for inliers and Mout
k for outliers where, for some small η1 > 0
Mink =
(ϵki , ϵ
k−1i ) ∈ Mk |
∥∥γiϵ
ki −Hk
k−1ϵk−1i
∥∥ ≤ η1
Moutk =
(ϵki , ϵ
k−1i ) ∈ Mk |
∥∥γiϵ
ki −Hk
k−1ϵk−1i
∥∥ > η1
.
Therefore Mink are all matching feature pairs that are explained by the homography
Hkk−1, and therefore correspond to ego-motion of the UAV, and Mout
k are all matching feature
pairs that are not explained by the homographyHkk−1, and therefore potentially correspond to
moving objects in the environment. Fig. 11.8 illustrates the application of this homography
segmentation scheme, where feature outliers Moutk have been retained.
Feature is moving relative to
scene
Figure 11.8: Motion detection using the homography matrix. Matching features are shown in redand blue. The set Min
k is shown in blue, and the set Moutk is shown in red.
The homography matrix provides good moving/non-moving segmentation if either
the motion of the UAV is purely rotational, or if the surrounding environment is planar.
A planar environment may be an adequate assumption for a high flying fixed-wing vehicle
moving over mostly-flat terrain. However, it is not a good assumption for multirotor UAV
moving in complex 3D environments, where non-planar, stationary features will appear to
be moving due to parallax. In that case, the potentially moving features Moutk need to be
further processed to discard features from the 3D scene that are not moving. Our approach
uses the epipolar constraint given in Equation (11.9) that is satisfied by stationary 3D points.
154

Therefore, potentially moving 3D points are given by
Mmovingk =
(ϵki , ϵ
k−1i ) ∈ Mout
k |∣∣ϵk⊤i Ek
k−1ϵk−1i
∣∣ > η2
for some small η2 > 0.
Fig. 11.9 illustrates the moving/non-moving segmentation scheme using video from
a multirotor flying in close proximity to 3D terrain. The blue feature points correspond to
features on 3D objects, which due to parallax are not discarded by the homography threshold
and are therefore elements of Moutk . However, these points satisfy the epipolar constraint
and therefore are not flagged as moving features. The red dots in Fig. 11.9 correspond
to Mmovingk and are actually moving in the scene. One drawback to this approach is that
features that are moving along the epipolar lines (i.e. moving in the same direction as the
camera) will be filtered out. However, this can be mitigated by controlling the camera so
that its motion is not aligned with the target’s motion.
Figure 11.9: Motion detection using the essential matrix. Matching pairs in Moutk are shown in
blue and red, where the red features are in Mmovingk .
11.3 R-RANSAC Multiple Target Tracker
As stated at the beginning of this chapter, this chapter is based off the paper [110]
that uses the original R-RANSAC algorithm, which we briefly presented in Subsection 1.2.9.
Since many of the components of R-RANSAC have already been discussed, we keep this
section short by only discussing key aspects of the three main phases of R-RANSAC: data
155

management, track initialization, and track management. During our discussion, we will
emphasize some of the difference between R-RNASAC and G-MTT.
Our implementation of R-RANSAC tracks objects in the current camera frame on
the current image plane using a linear time-invariant (LTI), constant-velocity model. The
track’s state is composed of the pixel location and pixel velocity of the target’s position and
velocity projected onto the image plane. Note that this is not a geometric representation of
the target since there is no notion of the target’s heading.
11.3.1 Data Management
R-RANSAC uses the probabilistic data association filter (PDAF) to associated mea-
surements to tracks, propagate tracks, and update tracks using the associated measurements.
The track likelihood is the number of track-associated measurements during the sliding time
window TW divided by the duration of the time window.
Since tracking is done on the image plane in the camera frame, when new measure-
ments are received, the previous measurements and tracks need to be transformed to the
current camera frame. The rest of this subsection describes the “Transform measurements
and tracks to current camera frame” block shown in Fig 11.2.
In the previous section we have shown how uncalibrated pixels are transformed be-
tween frames by the homography matrix as
γfϵbf/b = Hb
aϵaf/b.
We decompose the homography matrix into block elements as
Hba
=
H1 h2
h⊤3 h4
,
and the homogeneous image coordinates as ϵ=(
ϵ⊤ 1
)⊤
, where H1 ∈ R2×2, h2 ∈ R2×1,
h⊤3 ∈ R1×2 and h4 ∈ R.
156

Given the relationship
γf
ϵbf/b
1
=
H1 h2
h⊤3 h4
ϵaf/a
1
,
⇐⇒
γf ϵ
bf/b
γf
=
H1ϵ
a + h2
h⊤3 ϵ
af/a + h4
,
which implies that
ϵbf/b =
H1ϵaf/a + h2
h⊤3 ϵ
af/a + h4
and γf = h⊤3 ϵ
af/a + h4.
Defining the function
g(ϵ, H)=H1ϵ+ h2
h⊤3 ϵ+ h4
, (11.10)
we have that 2D-pixels are transformed between frames as ϵbf/b = g(ϵaf/a, Hba). Therefore, the
2D pixel velocity is transformed as
˙ϵbf/b =∂g
∂ϵ
∣∣∣ϵ=ϵ
af/a
˙ϵaf/a = G(ϵaf/a, Hba)˙ϵaf/a, (11.11)
where
G(ϵ, H) =(h⊤
3 ϵ+ h4)H1 − (H1ϵ+ h2)h⊤3
(h⊤3 ϵ+ h4)2
. (11.12)
The next lemma shows how position and velocity covariances are transformed between
images.
Theorem 11.3.1. Suppose that Hba is the homography matrix between frames a and b and
that ϵaf/a and ˙ϵaf/a are random vectors representing pixel location and velocity of feature f
in frame a with mean µaf/a, and
˙µaf/a, respectively, and covariances Σa
p and Σav respectively.
Suppose that ϵaf/a is transformed according to ϵbf/a = g(ϵaf/a, H
ba) where g is defined in Equa-
tion (11.10), then the mean and covariance of ϵbf/b and˙ϵbf/b are given by
µb = g(µa, Hb
a)
157

˙µb = G(µa, Hba)˙µa
Σbp = G(µa, Hb
a)ΣapG
⊤(µa, Hba)
Σbv = G(µa, Hb
a)ΣavG
⊤(µa, Hba)
where G is defined in Equation (11.12).
11.3.2 Track Initialization
Given that the measurements and tracks are expressed in and with respect to the
same coordinate frame, we use the new measurements that do not belong to any existing
track to initialize new tracks. All of the non-target associated measurements are stored in a
single batch of data. This is different than G-MTT, which organizes non-target associated
measurements into clusters.
To help illustrate the track initialization scheme, suppose that there is a single tar-
get in the camera’s field-of-view and a batch of measurements as depicted in Fig. 11.10a.
Some of the camera’s measurements correspond to the target while others are spurious false
measurements. Since there are multiple targets and false measurements, we need a way to
associate measurements to their respective targets or noise. We do this using the standard
RANSAC algorithm.
RANSAC takes a minimum subset of measurements such that the target’s state is
observable according to the system model. For our specific application, we assume an LTI
constant-velocity model, and that the target’s pixel location is measured by the camera using
the apparent motion algorithm discussed in Section 11.2. Therefore, the minimum subset
needs at least two measurements but can include more. We add the conditional constraint
that at least one of the measurements in the minimum subset is from the latest time step.
An illustration of the minimum subset is shown in Fig. 11.10b, where the measurements in
the minimum subset are circled in red.
Using the minimum subset of measurements and the least squares regression algo-
rithm discussed in [63], we calculate a hypothetical state estimate of the target’s state and
reconstruct its trajectory hypothesis using the system model. The trajectory hypothesis is
158

current measurement
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
(a) A batch of measurements with a single target.
current measurement
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
(b) A minimum subset of measurements neededto create a track hypothesis.
current measurement
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
(c) Black dots indicate measurements, and thecurrent batch of measurements are denoted withz∗. A particular minimum subset is denoted withred circle, including the current measurement zk.A track hypothesis generated from a minimumsubset of measurements, depicted with the redcurve.
Figure 11.10: A depiction of the first few steps of RANSAC
used to identify other measurement inliers (i.e. measurements that are close to the trajec-
tory hypothesis). A measurement is an inlier if it is within a user specified distance of the
trajectory hypothesis. The trajectory hypothesis is then scored using the number of inliers.
An example of a trajectory hypothesis is depicted in Fig. 11.10c by the red line. Note that
the definition of the inlier is a fixed distance that does not depend on the innovation covari-
ance, and that the score is the number of inliers and not the number of inliers from distinct
times. These definitions are both different than the ones used by the G-MTT as stated in
Chapter 8.
This above process is repeated up to a predetermined number of times, and the state
hypothesis with the most number of inliers is identified as shown in Fig. 11.11. The state
hypothesis that has the most number of inliers is then filtered using the PDAF to produce
a new current track.
159

current measurement
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
current measurement
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk−1
<latexit sha1_base64="uEreEZYNrmQ67MFn66BxHQ7aUSE=">AAADJnicbZLNbtNAEMe35qsNXykcuVhESBwgsisk4ICoxIVjkUhTKbai9Xocr7IfZnedEhYfuHPhCi/A03BDCHHhCXgGxkmFUoeRLP01v//Mzqw3qwS3Lop+7gQXLl66fGV3r3f12vUbN/v7t46trg2DEdNCm5OMWhBcwchxJ+CkMkBlJmCczV+0fLwAY7lWr92yglTSmeIFZ9Rhavxu6ucP42baH0TDaBXhtojPxOD5nw+alL8+Hk33g70k16yWoBwT1NpJHFUu9dQ4zgQ0vaS2UFE2pzOYoFRUgk39at4mvIeZPCy0wU+5cJXdrPBUWruUGToldaXtsjb5PzapXfEk9VxVtQPF1gcVtQidDtvlw5wbYE4sUVBmOM4aspIayhxeUe/8MWKm0VFKzh7807iXglOmpaQq94nSRjaTOPWJgMIl7wdxYvisRIVGA5tWB2/dKc9xbn/AVadPlRWNT9p1ssJXTYfmUMAb5NbhaAYENjOcqhles3/WNZebrcoulZtUduliky62ausVzrTI23+jRZtCUw8fT9x9Ktvi+GAYPxo+fRUNDvtkHbvkDrlL7pOYPCaH5CU5IiPCyJx8Ip/Jl+Br8C34HvxYW4Ods5rb5FwEv/8CpMIRFA==</latexit>
zk
<latexit sha1_base64="2nYvYZG4u19xVirHWxfkGjWosfA=">AAADJHicbZLNitRAEMd7o6u749esHr0EB8GDDMmyoB7EBS8ePKzg7C5MhqHTqUya6Y/YXZl1bPMMgid9AZ/Gmyh4EcEXsTOzSDZjQeBP/f5VXdXptBTcYhT93AouXd6+cnVnt3ft+o2bt/p7t4+trgyDEdNCm9OUWhBcwQg5CjgtDVCZCjhJ588bfrIAY7lWr3FZwkTSmeI5ZxR9avRu6ub1tD+IhtEqwk0Rn4vBsz8/fr/c/tg/mu4Fu0mmWSVBIRPU2nEclThx1CBnAupeUlkoKZvTGYy9VFSCnbjVtHV432eyMNfGfwrDVbZd4ai0dilT75QUC9tlTfJ/bFxh/njiuCorBMXWB+WVCFGHzephxg0wFEsvKDPczxqyghrK0F9Q7+IxYqa9o5CcPfyn/V4KzpiWkqrMJUobWY/jiUsE5Ji8H8SJ4bPCK2800LYivMUznvm53T5XnT5lmtcuadZJc1fWHZpBDm88t+hHMyB8M8Opmvlrdk+75qLdquhS2aaySxdtutiorVY41SJr/o0WTcqbev7xxN2nsimO94fxwfDJq2hw2Cfr2CF3yT3ygMTkETkkL8gRGRFGOPlAPpHPwZfga/At+L62BlvnNXfIhQh+/QUCKxCB</latexit>
zk−2
<latexit sha1_base64="k7i0QAzZ1TWYhyAHuPxYYdreOtA=">AAADJnicbZLNbtNAEMe3LtA2fKXlyMUiQuIAkR0hUQ6olbhwLBJpKsVWtF6P7VX2w+yuU8LWB+5cuMIL8DTcEEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCn1ve9rXrN3Z293o3b92+c7e/f3CqZaUIjIlkUp0lWAOjAsaGGgZnpQLMEwaTZP6y4ZMFKE2leGOWJcQc54JmlGDjUpP3Mzt/Mqpn/UEwDFbhb4rwUgyO/nyQqPj18WS27+1FqSQVB2EIw1pPw6A0scXKUMKg7kWVhhKTOc5h6qTAHHRsV/PW/kOXSf1MKvcJ46+y7QqLudZLnjgnx6bQXdYk/8emlckOY0tFWRkQZH1QVjHfSL9Z3k+pAmLY0glMFHWz+qTAChPjrqh39RiWS+coOCWP/2m3l4BzIjnHIrWRkIrX0zC2EYPMRBeDMFI0L5xyRgVtq4F35pymbm47oqLTp0yy2kbNOklmy7pDU8jgrePauNEUMNdMUSxyd832RddctFsVXcrblHfpok0XG7XVCieSpc2/kaxJOVPPPZ6w+1Q2xeloGD4dPn8dDI77aB276D56gB6hED1Dx+gVOkFjRNAcfUKf0Rfvq/fN++79WFu9rcuae+hKeL//Aqd/ERU=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−3
<latexit sha1_base64="wLnqx9IeykfLvMWUjn31HeGeXss=">AAADJnicbZLNbtNAEMe3LtA2fKVw5GIRIXGAyG6RKAdEJS4cW4k0lWIrWq/H9ir7YXbXKWHrA3cuXOEFeBpuqEJceAKegXVSIddhJEt/ze8/szPrTUpGtQmCnxve5rXrN7a2d3o3b92+c7e/e+9Ey0oRGBHJpDpNsAZGBYwMNQxOSwWYJwzGyex1w8dzUJpK8dYsSog5zgXNKMHGpcYfpnb2dL+e9gfBMFiGvy7CSzF49eejRMWvT0fTXW8nSiWpOAhDGNZ6EgaliS1WhhIGdS+qNJSYzHAOEycF5qBju5y39h+5TOpnUrlPGH+ZbVdYzLVe8MQ5OTaF7rIm+T82qUx2EFsqysqAIKuDsor5RvrN8n5KFRDDFk5goqib1ScFVpgYd0W9q8ewXDpHwSl58k+7vQScEck5FqmNhFS8noSxjRhkJjofhJGieeGUMypoWw28N2c0dXPbPSo6fcokq23UrJNktqw7NIUM3jmujRtNAXPNFMUid9dsX3bNRbtV0aW8TXmXztt0vlZbLXEiWdr8G8malDP13OMJu09lXZzsDcNnwxfHweCwj1axjR6gh+gxCtFzdIjeoCM0QgTN0Gf0BX31vnnfvR/excrqbVzW3EdXwvv9F6o8ERY=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
zk−4
<latexit sha1_base64="K/ZLv+sDWyFvo4Ud1Jy2UxGeQSE=">AAADJnicbZLNbtNAEMe3LtA2fDQtRy4WERIHiOyqEuWAWokLxyKRplJsRev12F5lP8zuOiVsfeDOhSu8AE/DDSHEhSfgGVgnFXIdRrL01/z+Mzuz3qRkVJsg+Lnhbd64eWtre6d3+87de7v9vf0zLStFYEQkk+o8wRoYFTAy1DA4LxVgnjAYJ7OXDR/PQWkqxRuzKCHmOBc0owQblxq/n9rZ08N62h8Ew2AZ/roIr8Tg+M8HiYpfH0+ne95OlEpScRCGMKz1JAxKE1usDCUM6l5UaSgxmeEcJk4KzEHHdjlv7T9ymdTPpHKfMP4y266wmGu94IlzcmwK3WVN8n9sUpnsKLZUlJUBQVYHZRXzjfSb5f2UKiCGLZzARFE3q08KrDAx7op6149huXSOglPy5J92ewm4IJJzLFIbCal4PQljGzHITHQ5CCNF88IpZ1TQthp4Zy5o6ua2B1R0+pRJVtuoWSfJbFl3aAoZvHVcGzeaAuaaKYpF7q7Zvuiai3arokt5m/IunbfpfK22WuJEsrT5N5I1KWfquccTdp/Kujg7GIaHw+evg8FJH61iGz1AD9FjFKJn6AS9QqdohAiaoU/oM/riffW+ed+9Hyurt3FVcx9dC+/3X6z5ERc=</latexit>
Figure 11.11: A depiction of generating multiple state hypotheses and their corresponding trajectoryhypotheses. Yellow trajectories represent previous state hypotheses, the red trajectory represent thecurrent track hypothesis being generated, and the green trajectory represents the state hypothesiswith the best score.
Now suppose that another target enters the FOV and new measurements are given to
RANSAC. Since RANSAC runs at every time step, it will begin to form new state hypotheses
for the new target and eventually initialize a new track.
11.3.3 Track Management
R-RANSAC maintains a bank of M tracks. Tracks are pruned to keep the number
of tracks at or below M . When there are more than M tracks, tracks with the lowest
track likelihood are pruned until there are only M tracks. As tracks are propagated and
updated, they may leave the field-of-view of the camera, they may coalesce, or they may
stop receiving measurements. To handle these situations, we remove tracks that have not
received a measurement for a predetermined period of time, and we merge similar tracks.
By merging, we mean that the track with the lowest rating is removed and the other kept.
Confirmed tracks, i.e., tracks that have a track likelihood, are given a unique numerical track
ID. The confirmed tracks passed to the track selection algorithm at every time step.
160

11.4 Track Selection
R-RANSAC passes confirmed tracks to the track selector which chooses a track to
follow. In this section, we list several possible options for target selection.
Target closest to the image center. One option is to follow the track that is closest to
the image center. If visual-MTT returns a set of normalized image coordinates ϵi for the
tracks, then select the track that minimizes ∥ϵi∥.Target Recognition A common automatic method for track selection is target recog-
nition using visual information. This method compares the tracks to a visual profile of the
target of interest. If a track matches the visual profile, then it is followed. A downside of
this method requires the visual profile to be built previously. For visual target recognition
algorithms see [119]–[121].
User input A manual method for track selection is to query a user about which track
should be followed. After the user has been queried, a profile of the target using gathered
data can be made to recognize the track in the future. One example of this is [122] which
uses a DNN to build the visual profile online.
The selected track is communicated to the target following controller.
11.5 Target Following Controller
This section presents one possible target following controller as shown in Fig. 11.2.
The controller consists of three parts: (1) A PID strategy that uses a height-above-ground
sensor to maintain a constant pre-specified height above the ground, (2) a position controller
that follows the selected track, and (3) a heading controller that aligns the UAV’s heading
with the target’s velocity vector. In this section we describe the position and heading con-
trollers in detail.
The provided track from R-RANSAC contains the state estimate of the target in
normalized image coordinates. Image coordinates are not invariant to the roll and pitch of
the UAV; therefore, we design the controller in the normalized virtual image plane.
Let pct/c denote the position of the target relative to the camera expressed in the
camera frame, the track produced by R-RANSAC is in normalized image coordinates and is
161

given by
ϵct/c =
K−1c pct/c
e⊤3K−1c pct/c
where Kc is the camera intrinsic parameters [123]. The target’s velocity is given by ϵct/c.
Note that the third element of ϵct/c is one, and the third element of ϵct/c is zero.
The coordinate axes in the camera frame are defined so that the z-axis points along
the optical axis, the x-axis points to the right when looking at the image from the optical
center in the direction of the optical axis, and the y-axis points down in the image to form
a right handed coordinate system. Alternatively, the virtual camera frame is defined so that
the z-axis points down toward the ground, i.e., is equal to e3, and the x and y axes are
projections of the camera x and y axis onto the plane orthogonal to e3. A notional depiction
of the camera and virtual camera frame is shown in Fig. 11.12.
Figure 11.12: A notional depiction of the camera frame and the virtual camera frame. The opticalaxis of the virtual camera frame is the projection of the optical axis of the camera frame onto thedown vector e3.
The virtual camera frame is obtained from the camera frame through a rotation that
aligns the optical axis with the down vector e3. The rotation, denoted Rvc is a function of the
roll and pitch angles of the multirotor as well as the geometry of how the camera is mounted
to the vehicle.
Therefore, the normalized virtual image coordinates of the track in the virtual camera
frame are given by
ϵvt/c =
Rvcϵct/c
e⊤3 Rvcϵct/c
. (11.13)
162

Similarly, the pixel velocity in normalized virtual image coordinates is given by
ϵvt/c =
1
(e⊤3 Rvcϵct/c)
2
((e⊤3 R
vcϵct/c)I −Rv
cϵct/ce
⊤3
) (
Rvc
[ωcc/v
]
3×ϵct/c +Rv
c ϵct/c
)
. (11.14)
Equations (11.13) and (11.14) are computed by vision data using the R-RANSAC
tracker described in the previous section. We also note, that ϵvt/c is the normalized line-of-
sight vector expressed in the virtual camera frame, i.e.,
ϵvt/c =
pvt/ceT3 p
vt/c
= λpvt/c,
where λ = 1/(eT3 pvt/c) is the constant height above ground. In addition we have that
ϵvt/c = λpvt/c = λ
(pvt/i − pvc/i
),
ϵvt/c = λpvt/c = λ
(pvt/i − pvc/i
),
where pvt/i and pvc/i are the inertial velocities of the target and camera, and pvt/i and pvc/i are
the inertial accelerations of the target and camera, all expressed in the virtual camera frame.
If we assume that the inertial acceleration of the target is zero, and that the center of the
camera frame is the center of the multirotor body frame, then
ϵvt/c = −λav,
where av = pvb/i = pvc/i is the commanded acceleration of the multirotor, and pvb/i is the
acceleration of the UAV with respect to the inertial frame and expressed in the virtual
camera frame.
Theorem 11.5.1. Assume that the inertial acceleration of the target is zero, and that the
height-above-ground is constant and known. Let ϵvd/c be the desired constant normalized line-
of-sight vector to the target, and let
av =1
λ
((k1 + k2)ϵ
vt/c + k1k2
(ϵvt/c − ϵ
vd/c
)), (11.15)
163

where k1 > 0 and k2 > 0 are control gains, then
ϵvt/c → ϵ
vd/c.
Proof. Define the error as e= ϵ
vt/c − ϵ
vd/c, then e = ϵ
vt/c and
e = ϵvt/c = ϵ
vt/i − ϵ
vc/i = −ϵ
vc/i = −λav.
Let S = e+ k1e, and define V = 12S⊤S. Then
V = S⊤S = S⊤ (e+ k1e) = S⊤ (−λav + k1e)
= −k2S⊤S,
where we have used the fact that Equation (11.15) is equivalent to a = 1λ(k1e+ k2S).
Therefore S → 0, which implies that e → 0 and e → 0.
The desired attitude is selected to align with the target’s velocity vector pnt/i as follows:
Rid =
(
r1 r2 r3
)
(11.16)
r1 =(I − e3e
⊤3 )p
vt/i
∥∥∥(I − e3e⊤3 )p
vt/i
∥∥∥
(11.17)
r2 = r1 × e3 (11.18)
r3 = e3. (11.19)
Therefore, the x-axis of the desired frame points in the direction of the desired velocity
vector, and the attitude is otherwise aligned with the body-level frame. The attitude control
scheme is derived using the technique given in [124].
11.5.1 Following Multiple Targets
We briefly mention two approaches to following multiple targets. If the targets are
clustered together, then following can be achieved by aligning their average position with
164

the camera’s optical center using a technique similar to the one presented in this paper. A
more realistic and common approach is a decentralized multiple target tracking scheme that
uses a fleet of UAVs to cooperatively track targets in their respective surveillance region and
share their information via a communication network [125].
11.6 Results
We implemented the target tracking and following pipeline in simulation using PX4
software-in-the-loop with Gazebo and ROS [126]. We used the IRIS multirotor model with
a camera pitched down by 45 degrees provided by the PX4. We used default simulated
noise values. We had a single target move in a square upon command. For simplicity, we
had the UAV find the target using visual MTT before telling the target to move. Once the
target began moving, the UAV followed it fairly well in the normalized virtual image plane.
Figure 11.13 shows the error plots. Notice that the yaw angle has large increases in error at
several points. This is when the target is turning 90 degrees. These turns also impact the
error in the North-East plane. The results show the effectiveness of the complete pipeline
and its robustness to target modeling errors. A video of the simulation is at
https://youtu.be/C6JWr1dGsBQ
270 280 290 300 310 320Time (s)
0.5
0.0
Erro
r NVI
P (m
) X Error
270 280 290 300 310 320Time (s)
0.10.00.1
Erro
r NVI
P (m
) Y Error
270 280 290 300 310 320Time (s)
0
1
Erro
r (ra
ds)
Yaw Error
Figure 11.13: The X and Y errors are in the normalized virtual image plane in units of meters andthe yaw error is in units of radians.
165

11.7 Conclusion
We have presented an architecture for multiple target tracking and following on the
image plane using a fixed camera mounted to a moving UAV. The architecture used a visual
frontend algorithm to extract measurements, homography, and essential matrix from the
images. We presented the novel algorithm called apparent motion to find moving features
in the images.
The measurements and homography were given to R-RANSAC to track the targets
on the image plane. We derived the process that uses the homography to transform previous
measurements and tracks from the previous image frame to the current image frame.
We also presented a novel target following controller that uses an IBVS scheme with
a non-linear controller to follow a target. Future work regarding this project is to improve
the controller to track multiple targets simultaneously, and incorporate target recognition
for when tracks leave the camera’s field-of-view.
166

CHAPTER 12. TRACKING ON SE(2) USING A MONOCULAR CAMERA
This chapter shows how to track ground target’s that evolve on the special Eu-
clidean group SE (2) using G-MTT in place of R-RANSAC in the end-to-end multiple-
target-tracking framework presented in Chapter 11. An illustration of the multiple target
tracking (MTT) scenario this chapter discusses is in Fig. 12.1, where multiple ground targets
are being tracked by an unmanned air vehicle (UAV) via a monocular camera. The targets’
trajectories are represented as dashed lines, and the targets’ headings are represented as red
arrows relative to the x-axis represented as a black arrow.
Figure 12.1: A depiction of three targets being tracked by a UAV via a monocular camera. Thetargets’ trajectories are represented as dashed lines, and the targets’ headings are represented asred arrows.
Instead of tracking on the normalized image plane as done in Chapter 11, in this
chapter we track on the normalized, virtual image plane (NVIP) as discussed in Section 12.1.
167

We track on the NVIP to be able to transform measurements and tracks from the previous
tracking frame (previous NVIP frame) to the current tracking frame (NVIP frame) using the
homography as discussed in detail in Section 12.5.
The rest of this chapter is outlined as follows. In Section 12.1 we review the NVIP
and discuss how to adjust the visual front end in Chapter 11 to produce measurements
and the homography in the NVIP. In Section 12.2 we present the system model for our
specific application. In Sections 12.3 and 12.4 we prove that the system is locally-weakly-
observable and show how to seed the negative log likelihood optimization problem during
track initialization as discussed in Chapter 8. In Section 12.5 we derive the transformation
for the measurements and tracks from the previous NVIP to the current NVIP using the
homography. In Section 12.6 we present and discuss experimental results and then conclude
in Section 12.7
12.1 Normalized Virtual Image Plane
The virtual image plane is the rotated and projected image plane such that the
rotated z-axis is perpendicular to the ground, the rotated xy-plane is parallel to the ground,
the x,y,z-axes form a right handed rotation, and the virtual image plane is parallel to the
ground at a distance of 1 pixel along the z-axis from the camera. This relation is illustrated
in Fig. 12.2.
Virtual Image Plane
Image Plane
Ground Plane
Figure 12.2: An illustration of the relationship between the image plane and the virutal imageplane.
168

To describe the virtual image plane more formally, let pct/c =[
xct/c, yct/c, 1
]⊤
∈ R3
denote the pixel location of the target in the image plane expressed in and with respect to
the camera frame. Let Rvc denote the rotation from the camera frame to the virtual camera
frame. This rotation is a composite of the rotation about the camera’s z-axis and then the
rotation about the new camera’s x-axis so that the virtual image plane is parallel to the
ground. It can be thought of as un-rolling and un-pitching the camera frame. The pixel
location of the target expressed in the virtual camera frame and with respect to the camera
frame is
pvt/c =Rvcpct/c
e⊤3 Rvcpct/c
,
where e3 ∈ R3 is a unit vector with the third component being 1. The origin of the virtual
camera frame and the camera frame are the same; hence, pvt/c = pvt/v.
To transform a pixel from the image plane to the normalized virtual image plane
(NVIP), we normalize the pixel using the camera’s intrinsic parameters K, rotate it using
Rvc and then project it so that the NVIP is at a distance of one along the z-axis from the
camera. Mathematically, the pixel location of the target in the NVIP is
pnt/c =RvcK
−1pct/c
e⊤3 RvcK
−1pct/c. (12.1)
To produce measurements and compute the homography in the NVIP, the visual
frontend in Chapter 11 requires the rotation Rvc to be provided. After matching features
are detected according to Subsection 11.2.1, the visual frontend transforms the matched
features from the image plane to the NVIP using equation (12.1). The homography and
essential matrix are then calculated using the transformed matched features using the same
process as discussed in Subsections 11.2.2 and 11.2.3. The transformed measurements are
segmented into moving and non-moving using the homography and essential matrix in the
NVIP according to Subsection 11.2.4. The homography and “moving” features in the NVIP
are given to G-MTT.
The rest of this chapter assumes that the measurements and homography are in the
NVIP.
169

12.2 System Model
We assume that the target’s motion can be modeled using a discrete, constant-velocity
model driven by white noise as stated in Assumption 2.1.. We assume that the target’s
motion is constrained to the ground and that the ground can be approximated as flat.
This constraint implies that the target’s motion evolves on the special Euclidean group of
two dimensions SE (2) since this Lie group expresses all rotations and translations in two
dimensional space. Therefore, the target’s state is x = (g, v) ∈ Gx= SE (2)×RSE(2) where
the pose g is an element of the Lie group SE (2) defined by the set
SE (2) =
R p
01×2 1
∈ R3×3
∣∣∣∣∣∣
R ∈ SO (2) and p ∈ R2
equipped with matrix multiplication. In our application R denotes the rotation from the
body frame to the virtual camera frame and p denotes the target’s position expressed in the
virtual camera frame and with respect to the virtual camera frame.
The target’s velocity is an element of the corresponding Cartesian algebraic space
defined as the set
RSE(2) ≜
ρ
ω
∈ R3
∣∣∣∣∣∣
ω ∈ R and ρ ∈ R2
,
where ρ denotes the target’s velocity expressed in the body frame and with respect to the
virtual camera frame and ω denotes the target’s angular velocity expressed in the body frame
and with respect to the virtual camera frame. For more details on the Lie group SE (2) see
Appendix C.4.
We perform target tracking on the NVIP which is isomorphic to the ground plane.
This implies that the target’s pose and twist projected to the NVIP is a scaled version of
the target’s state that preserves relative shape and volume. Thus, we represent the target’s
state on the NVIP as x ∈ Gx= SE (2)×RSE(2).
We use the system model defined in equation (4.1) where the state transition function
is defined in equation (4.2). For the observation function, the visual frontend produces point
170

measurements (i.e. pixel locations) in the NVIP. Therefore, the observation function is
zk = h (xk, rk) (12.2)
= pk + rk, (12.3)
where pk is the target’s pixel location in the NVIP, rk ∼ N (0, R) is the measurement noise,
and zk ∈ Gs= R2 is the measurement in the NVIP. The measurement is an element of
two dimensional Euclidean space which is a Lie group. For details on this Lie group see
Appendix C.1.
12.2.1 System Affinization
The Jacobians of the state transition function are defined in equation (4.5). The
Jacobians of the observation function are defined in the following Lemma.
Lemma 12.2.1. We suppose directly that the observation function is as defined in equa-
tion (12.2) and that rk ∼ N (0, R) is a concentrated Gaussian distribution. Let xk =
xkExpGxI (xk) where xk ∈ RGx is a small perturbation, then the partial derivatives of the
observation function with respect to the state and measurement noise evaluated at the point
ζhk = (xk, 0) are
Hk=∂h
∂x
∣∣∣∣ζhk
= [RkV (ωk) , 02×4] (12.4)
Vk=∂h
∂r
∣∣∣∣ζhk
= I2×2, (12.5)
where V (ωk) is defined in equation (C.23). Consequently, the affine observation function is
zk ≈ h (xk, 0)ExpR2
I (Hkxk + rk)
= h (xk, 0) +Hkx+ rk, (12.6)
where we used the fact that ExpR2
I is the identity map.
171

Proof. The proof for Vk is trivial and will not be provided. The Jacobian Hk is evaluated
with the measurement noise set to zero. This let’s us simplify the derivation by initially
setting the measurement noise to zero since it will have no impact on the derivation. Let
τ =[
(τ p)⊤ , τR, (τ ρ)⊤ , τω]⊤
∈ Rx denote a perturbation of the state when computing the
derivative where τ p, τ ρ ∈ R2 and τR, τω ∈ R. The derivation of Hk is written as if we are
perturbing the state by the vector τ where all of its elements are simultaneously non-zero;
however, we are only perturbing the state by a single element of τ at a time.
Using the definition of the derivative in equation (3.11),
∂h
∂xk= lim
τ→0
LogR2
I
(h (xk, 0)
−1 h(xkExp
GxI (τ) , 0
))
τ
Using the definition of the observation function in equation (12.2), the definition of the
map ExpR2
I in equation (C.1) and the definition of ExpGxI in equation (C.21) the derivative
becomes
∂h
∂xk= lim
τ→0
h(xkExp
GxI (τ) , 0
)− h (xk, 0)
τ
= limτ→0
pk +RkV (ωk) τp − pk
τ
= limτ→0
RkV (ωk) τp
τ
= limτ→0
[
RcV (ωk) τp, 02×4
] 1
τ,
where V (ωk) is defined in equation (C.23). Therefore, the partial derivative of the observa-
tion function in matrix notation is as defined in equation (12.4).
12.3 Proving Local Observability
Let Σ denote the system model defined in equations (4.1), (4.2) and (12.2). To track
the target, the system model Σ must be observable. To properly discuss observability of the
system we first present several definitions taken from [127]–[129].
Definition 12.3.1. A pair of initial points x10 and x20 are said to be indistinguishable if
(Σ, x10) and (Σ, x20) realize the same input-output map for every admissible input ui for all
172

time. The system Σ is said to be observable if for any two indistinguishable initial states
xi0 and xj0, xi0 = xj0, i.e. they are equal.
In terms of target tracking the input ui is modeled as Gaussian white noise and is
incorporated into the process noise qi:k and the initial points x10 and x20 are initial states.
Notice that observability is a global concept and it might require traveling far from
the initial states before being able to distinguish them, implying that it can be very difficult
to show and prove that a system is observable from every initial condition. There are many
systems that are not observable. In these cases, we use weaker conditions of observability.
Definition 12.3.2. Let Gx denote the configuration manifold of the state x. The system Σ
is weakly observable if for all xi0 ∈ Gx, there exists a neighborhood U i ⊂ Gx of xi0 such
that if xj0 ∈ U i and xj0 is indistinguishable from xi0, then xi0 = xj0.
Essentially, if the system is weakly observable, then for every initial state xi0 there is
a neighborhood U i such that xi0 is distinguishable from every other point in U i. However,
this definition does not indicate how far xi0 must travel to be distinguishable from the other
points in U i. Also, this does not mean that xi0 is distinguishable from points outside of U i.
Definition 12.3.3. A pair of initial points x10 and x20 are said to be U-indistinguishable
if (Σ, x10) and (Σ, x20) realize the same input-output map for every admissible input ui that
maintains the trajectory of the system in U ⊂ Gx. The system Σ is locally weakly ob-
servable if for all xi0 ∈ Gx there exists a neighborhood U ⊂ Gx of xi0 such that if xj0 ∈ U
and xj0 is U-indistintiguishable from xi0, then xi0 = xj0.
This last definition means that if Σ is locally weakly observable, then neighboring
points can be distinguished from other neighboring points while staying inside the neighbor-
hood U .
To determine if a system is locally weakly observable we use the observability rank
condition which requires the observability matrix [127]–[129]. We construct the observability
matrix in a way to help build intuition.
Let
zi = h0:i (x0, q0:i, t0:i, ri)= h (f (x0, q0:i, t0:i) , ri) (12.7)
173

denote a new observation function that maps the initial state x0 to the measurement at time
ti where h is the observation function defined in equation (12.2), and f is the state transition
function defined in equation (4.2).
Let Z = (z0, z1, z2, . . . , zk) ∈ R2k = R2×R2×R2×· · ·×R2 be a tuple of measurements
taken at distinct times, and let Z = (z0, z1, z2, . . . , zk) ∈ R2k denote the corresponding
estimated measurements where zi = h0:i (x0, 0, t0:i, 0) and x0 = x0ExpGxI (x0). Also let
O =
∂h0:0∂x
∣∣ζh0:0
∂h0:i∂x
∣∣ζh0:i
∂h0:j∂x
∣∣∣ζh0:j...
∂h0:k∂x
∣∣ζh0:k
, (12.8)
denote the matrix of stacked Jacobians of the observation function h0:i evaluated at the point
ζh0:i = (x0, 0, t0:i, 0). The matrix O is called the observability matrix.
We construct the error term e = LogR2k
I
(
Z−1Z)
which can be approximated using
the affine observation function to get
e ≈ Ox0 + noise terms.
Let n denote the dimension of the state. If O is full rank (a rank of n), then O is an injective
map and x0 can be estimated using a least squares method. Therefore, the state can be
estimated as x0 = x0ExpGxI (x0). This does not mean that x0 is distinguishable from all
other initial states; rather, it is only locally distinguishable. This is what it means to be
locally weakly observable, and this concept is derived from the inverse function theorem.
174

Using the chain rule to get ∂h0:i∂x
= HiF0:i, the observability matrix simplifies to
O =
H0
HiF0:i
HjF0:j
...
HkF0:k
, (12.9)
where Hi is the Jacobian of the observation function with respect to the state defined in
equation (12.4) and evaluated at the point ζhi = (f (x0, 0, t0:i) , 0), and F0:i is the Jacobian of
the state transition function with respect to the state defined in equation (4.5) and evaluated
at the point ζf0:i = (x0, 0, t0:i).
Let the target’s velocity in the body frame be denoted ρ = [ρx, ρy]⊤, where ρx is the
velocity in the forward direction and ρy is the velocity perpendicular to the forward direction.
By analyzing the observability matrix, the system is not locally weakly observable. However,
by constraining the target’s velocity to be non-zero and aligned with the heading, the system
is observable. This means that for the system to be locally weakly observable, we require
that ρx = 0 and ρy = 0. This is a reasonable assumption when tracking moving people or
cars on the ground since they typically move in the direction of their heading.
12.4 Seeding Track Initialization
G-MTT uses a subset of measurements from cluster Cm, denoted ZCm , to generate
a state hypothesis xhk by finding the state hypothesis that maximizes the likelihood of the
largest subset of measurements in ZCm subject to the system model. The state hypothesis
is found by optimizing the negative log likelihood of the probability of the measurements
conditioned on the state hypothesis and subject to the system model and discussed in Sec-
tion 8.2.
To speed up the optimization algorithm, we can seed it with a good guess of what
the state hypothesis should be. In this section we discuss our seeding strategy.
175

Let ZCm = zk, zi, zj, . . . denote a subset of measurements from cluster Cm where zk
is a measurement from the current time, and the other measurements are from different and
distinct times. Since we observe the position of the target, we can approximate the position
of the target at the times tk, ti, and tj as pk = zk, pi = zi and pj = zj. Using these estimated
positions, we can numerically approximate the velocities
pk =pk − piti:k
pi =pi − pjtj:i
,
where pℓ = Rℓρℓ is the velocity of the target with respect to and expressed in the normalized
virtual camera frame.
Let pk = [pxk , pyk ]⊤. Using the constraint that the heading of the target is aligned
with the translational velocity,
Rk ≈1
∥pk∥
pxk −pykpyk pxk
,
and
ρk =
∥pk∥0
.
We can follow a similar procedure to approximate Ri.
According to the state transition function in equation (4.2),
Rk ≈ RiExpSO(2)I (ti:kωi) .
Solving for ωi yields
ωi ≈ LogSO(2)I
(R−1i Rk
)/ti:k.
Under the assumption that velocity is constant ωk = ωi. Therefore, we seed the optimization
algorithm with (pk, Rk, ρk, ωk).
176

12.5 Transforming Measurements and Tracks
We perform tracking on the NVIP which moves with the UAV. This requires G-MTT
to receive transformation data to transform the tracks and previous measurements from
the previous tracking frame (the previous normalized virtual camera frame) to the current
tracking frame (the current normalized virtual camera frame).
We use the homography to transform the measurements and tracks. The measure-
ments are transformed according to Theorem 11.3.1, and the tracks are transformed accord-
ing to the following theorem.
Lemma 12.5.1. Let xn−=(
gn−, vn
−)
∈ Gx and P n−denote the track’s state estimate and
error covariance in the previous tracking frame where we dropped the subscripts denoting
time, and
gn−
=
Rn−
pn−
01×2 1
(12.10a)
vn−
=
ρn
−
ωn−
(12.10b)
Rn−
=1
∥∥∥ ˙pn
−
∥∥∥
e1
(
˙pn−)
e2
(
− ˙pn−)
e2
(
˙pn−)
e1
(
˙pn−)
, (12.10c)
where p is the target’s estimated pixel location in the NVIP, R is the rotation from the body
frame to the normalized virtual camera frame, ρ is the translational velocity in the body
frame, ω is the angular velocity, and ei is a function that extracts the ith component of a
tuple. Also, let
H =
H1 h2
h⊤3 h4
,
denote the homography broken down into block elements as done in Subsection 11.3.1.
We suppose directly that the target’s state can be represented as x = (g, v) ∈ SE (2)×RSE(2), the target’s heading is aligned with it’s velocity, (i.e. the velocity in the body frame
perpendicular to the forward direction is zero), the ground the target moves on is approxi-
177

mately planar, tracking is done in the NVIP, and the homography calculated in the NVIP is
provided, then the transformed state estimate and error covariance are
Rn = H1Rn−
,
pn = gh
(
H, pn−)
,
ρn =ρn
−
h4,
ωn = ωn−
,
P n = CP n−
C⊤,
where
gh
(
H, pn−)
=H1p
n−+ h2
h4,
C = diag
(1
h4,1
h4, 1,
1
h4,1
h4, 1
)
.
Proof. We denote the track’s state in the previous NVIP as xn− = xn−ExpGxI
(
xn−)
. Ac-
cording to equation (11.4), the homography is
Hnn−
=
(
Rnn− +
pnn−/n
dnn⊤
)
, (12.11)
where d is the distance from the NVIP to the ground plane, Rnn− is the rotation between
the previous and current NVIP, pnn−/n is the translation between the previous and current
NVIP, and n is the unit vector perpendicular to the NVIP. Since the NVIP is always parallel
to the ground, n = [0, 0, 1]⊤, and the rotation between the previous and current NVIP is
about the vector n = [0, 0, 1]⊤. This implies that
Rnn− =
R (ψ) 02×1
01×2 1
, (12.12)
178

where R (ψ) ∈ SO (2) is a two dimensional rotation. These properties simplify the homog-
raphy to
H =
R (ψ) −πe3
(pn
⊤
d
)
0 1− e3
(pn
⊤
d
)
,
where we have dropped the frame notation, and πe3 extracts the first two components of it’s
argument. Thus
H1 = R (ψ) ,
h2 = −πe3(pn⊤
d
)
,
h⊤3 = 0,
h4 = 1− e3
(pn⊤
d
)
.
As given in equation (11.3), the homography satisfies the constraint
γf
pn
1
= H
pn
−
1
.
Expanding it out gives us
γfp
n
γf
=
H1p
n−+ h2
h4
,
which indicates that γf = h4. Substituting in h4 for γf and solving for pn yields
pn =1
h4
(
H1pn−
+ h2
)
= gh
(
H, pn−)
. (12.13)
Taking the above equation with respect to time yields
pn =∂gh
(
H, pn−)
∂pn− pn−
=H1
h4pn
−
179

= Ghpn−
, (12.14)
where pn = Rnρn.
Using the definition of the rotation matrix Rn in equation (12.10) and substituting
in equation (12.14) for pn yields
Rn =1
∥pn∥
e1 (p
n) e2 (−pn)e2 (p
n) e1 (pn)
=1
∥Ghpn−∥
e1
(
Ghpn−)
−e2(
Ghpn−)
e2
(
Ghpn−)
e1
(
Ghpn−)
= H1Rn−
. (12.15)
Noting that pn = Rnρn and using equations (12.14) and (12.10), the velocity in the
body frame is
ρn = (Rn)−1 pn
= (Rn)−1Ghpn−
= (Rn)−1GhRn−
ρn−
=(
Rn−)−1
H−11
H1
h4Rn−
ρn−
=ρn
−
h4. (12.16)
Since a rotation and translation does not affect the angular velocity in SE (2),
ωn = ωn−
. (12.17)
Let T : Gx → Gx denote the transformation of the state from the previous NVIP to
the current NVIP. Using the method in Subsection 3.4.5, the first-order Taylor series of the
transformation is
xn ≈ T(
xn−)
ExpGxI
(
Cxn−)
, (12.18)
180

where C= ∂T
∂x
∣∣xn− is the partial derivative of the transformation T with respect to the state,
xn = T(
xn−)
is the transformed state estimate and xn = Cxn−is the transformed error
state.
The covariance of the transformed error state is
cov (xn) ≈ cov(
Cxn−)
(12.19)
= Ccov(
xn−)
C⊤ (12.20)
= CP n−
C⊤. (12.21)
To calculate C we can decompose it into the blocks
C =
C11 C12
C21 C22
,
where Cij ∈ R3×3. Let T1 denote the portion of T that transforms the state’s pose, and T2
denote the portion of T that transforms the state’s twist.
Using equations (12.13) and (12.15), letting τ g =(τ p, τR
)∈ RSE(2) denote the
perturbation of the pose when taking the derivative and using the method in Subsection 3.4.5
to compute the derivative, the first block is
C11 =∂T1 (g)
∂g
= limτg→0
LogSE(2)I
(
T1 (g)−1 T1
(
gExpSE(2)I (τ g)
))
τ g
= limτg→0
LogSE(2)I
H1R
1h4
(H1p+ h2)
01×2 1
−1
H1RExp
SO(2)I
(τR)
1h4
(H1 (p+Rτp) + h2)
01×2 1
τ g
= limτg→0
LogSE(2)I
R⊤H−1
1 H1RExpSO(2)I
(τR)
R⊤H−11
1h4
(H1 (p+Rτp − p) + h2)
01×2 1
τ g
= limτg→0
LogSE(2)I
Exp
SO(2)I
(τR)
1h4τp
01×2 1
τ g
181

=diag
(1h4, 1h4, 1)
τ g
τ g;
thus, C1 = diag(
1h4, 1h4, 1)
.
Using equations (12.16) and (12.17), letting τ v = (τ ρ, τω) ∈ RSE(2) denote a pertur-
bation of the twist and using the method in Subsection 3.4.5 to compute the derivative, the
block C22 is
C22 =∂T2∂v
(12.22)
= limτv→0
1h4
(ρ+ τ ρ)
ω + τω
−
ρ
ω
τ v(12.23)
= limτv→0
1h4τ ρ
τω
τ v(12.24)
= diag
(1
h4,1
h4, 1
)
. (12.25)
It is trivial to show that C21 = C12 = 03×3. Putting all of the blocks together yields
C = diag
(1
h4,1
h4, 1,
1
h4,1
h4, 1
)
.
12.6 Experiment
In this section we compare tracking using the constant-velocity target model on SE (2)
(SE (2)-CV) described in this chapter with a linear, time-invariant, constant-velocity (LTI-
CV) model via simulation and hardware results.
The simulation consists of twenty targets moving on the ground with random trajec-
tories being observed by a camera 30 meters above ground. The simulated camera’s FOV is
70 degrees with image dimensions 1080× 1920 which results in the dimensions of the NVIP
being 0.8 × 1.4 m. The simulated camera also produces 100 false measurements per sensor
182

0 5 100
5
10
15
20
NV
T
LTI-CV
SE2
0 5 100
5
10
15
20
NM
T
LTI-CV
SE2
Figure 12.3: The image shows the number of valid tracks and the number of missed targets at eachtime step of the simulation. The x-axis is time in seconds.
scan. The standard deviation of the measurement noise is√1e−5 and the standard deviation
of the process noise is set to 0.01. The simulation is performed 100 times with a time step
of 0.1 seconds for a duration of 10 seconds.
To compare the two target models we calculate the performance measures: number of
valid targets (NVT), number of missed targets (NMT), average Euclidean error (AEE), and
the track probability of detection (TPD) as described in [88]. Fig. 12.3 shows the number of
valid targets and the number of missed targets at each time step of the simulation. Initially,
neither of the methods are tracking the targets. This is because G-MTT requires a batch
of measurements before it begins to initialize tracks. With that being said, it is easily
noticeable that the SE (2)-CV model finds the targets better than the LTI-CV model. The
track probability of detection for the SE(2)-CV model is 0.874 and for the LTI-CV model is
0.56 which indicates that the SE (2)-CV model has a lot higher probability of tracking the
targets. Lastly the average Euclidean error in position for the SE (2)-CV model is 8e−4 and
for the LTI-CV model is 7e−4. The error is so small because the area of the NVIP is small.
For hardware results we recorded a video from a multirotor UAV hovering above a
field where individuals were moving with different types of trajectories. The SE (2)-CV
model never looses a target once; however, the LTI-CV model does. The LTI-CV was able
to perform fairly well since the targets were moving fairly slow. The hardware results are
shown at https://www.youtube.com/watch?v=kTQOi0bAuek&list=PLYgEzAHuTvsAvUDxp
raTkIfxcIAQ5wSIu&index=4&ab channel=MAGICCLab for tracking using SE(2)-CV models,
and at and https://www.youtube.com/watch?v=C6o7f1KXkIE&list=PLYgEzAHuTvsAvUD
xpraTkIfxcIAQ5wSIu&index=5&ab channel=MAGICCLab for tracking using LTI-CV models.
183

12.7 Conclusion
The purpose of this chapter is to modify the end-to-end MTT framework presented
in Chapter 11 to track targets whose motion evolves on SE (2) using the G-MTT algorithm.
The necessary contributions for this modification consisted of defining the system model in
Section 12.2, proving that the system is locally weakly observable in Section 12.3, designing
a seeding strategy for tack initialization in Section 12.4, and deriving the transformation
between the previous NVIP and the current NVIP in Section 12.5.
Through experimental simulation and hardware results, we have shown that tracking
on SE (2) significantly increase tracking performance as compared to tracking with an LTI-
CV model.
184

CHAPTER 13. TRACKING ON SE(3) USING A MONOCULAR CAMERA
Tracking highly maneuverable targets is a challenge. Consider tracking multirotors
where the multirotors have a non-linear trajectory composed of turning, rotational and linear
motions. Tracking these targets can be difficult especially for agile maneuvers. One possible
solution to compensate for the target’s high maneuverability is to use higher-order, linear,
time-invariant (LTI) models such as constant acceleration or jerk LTI models.
The authors of [23] show that using an LTI constant jerk model outperforms an LTI
constant acceleration model in tracking a highly maneuverable target in three dimensional
space. This idea is tested and verified in [130], which also provides a short survey of different
LTI constant jerk models. A similar experiment is conducted in [22] which implements
LTI constant acceleration and jerks models with the MTT algorithm Recursive RANSAC
(R-RANSAC) originally developed in [63]. It is shown in [22], that the LTI constant jerk
model outperforms the LTI, constant-velocity model in tracking vehicles, especially when
the vehicles performs a U-turn.
While it has been shown that tracking on SE (2) using a constant-velocity model
outperforms the LTI, constant-velocity model in [9], [32], [131], the constant velocity model
on SE (2) has not been compared to higher-order LTI models such as constant-acceleration
and jerk models.
In this chapter we show how to track multiple quadrotors using a constant-velocity
target model on SE (3) (SE (3)-CV) using the G-MTT algorithm. We also compare the
performance of the SE (3)-CV target model to three other target models using the G-MTT
algorithm: an LTI, constant-velocity (LTI-CV) target model, an LTI, constant-acceleration
(LTI-CA) target model, and an LTI, constant-jerk (LTI-CJ) target model as defined in [8].
In Section 13.1 we derive the system model for the different target models. In Sec-
tion 13.2 we present the experiment, and in Section 13.3 we conclude the chapter.
185

13.1 System Model
In this section we first define the system model for the SE (3)-CV target model, and
then define the system model for the LTI-CV, LTI-CA, and LTI-CJ target models.
13.1.1 System Model SE(3)-CV
The quadrotors move in three dimensional space; therefore, we can represent their
natural configuration manifold using the Lie group SE (3), which is the set of all rotations
and translations in three dimensional space. For a description of SE (3) see Appendix C.5.
We model the target’s state as xk = (gk, vk) ∈ Gx= SE (2) ×RSE(2), where gk ∈ G is the
target’s pose at time tk and vk ∈ RSE(2) is the target’s twist at time tk.
The targets are observed by a realsense D435i camera. The images are given to a
deep neural network (DNN) described in the paper [132] but extended to 3D boxes as in the
paper [133]. The DNN extracts the poses of the targets relative to the camera frame, and
feeds them to the G-MTT algorithm. We model the sensor’s observation function as
zk = h (xk, rk) (13.1)
= gkExpGSE(3)
I (rk) , (13.2)
where gk is the target’s pose, rk ∼ N (0, R) ∈ RGSE(3)is the measurement noise, and
zk ∈ SE (3) is the measurement.
The target’s system model is defined by the equations (4.1), (4.2), and (13.1). The
state transition function in Chapter (4.2) is defined generically for any Lie groups, and is
modified to SE (3) using the appropriate terms found in Appendix C.5.
The Jacobians of the observation function evaluated at the point ζhk = (xk, 0) are
Hk=∂h
∂x
∣∣∣∣ζhk
= I (13.3)
Vk=∂h
∂r
∣∣∣∣ζhk
= I. (13.4)
186

The derivation of these Jacobians are easily derived using the method in Section 4.1. The
Jacobians of the state transition function are derived in Section 4.1.
13.1.2 System Model LTI
Tracking the quadrotors using an LTI target model is a non-geometric approach, but
since LTI target models are designed in Euclidean space and Euclidean space is a Lie group
as shown in Appendix C.1, we can use the G-MTT algorithm.
The G-MTT algorithm as we have presented it is designed to be used with constant-
velocity target models. To use it with higher-order, LTI models we must redefine the system
model, and the system model’s Jacobians. We do this generically for any n-dimensional
Euclidean space.
Let pk ∈ Rn denote the target’s position in n-dimensional space at time tk, and
x = [pk, pk, pk, . . .]⊤ ∈ Ro∗n denote the target’s state of order o where pk denotes the velocity,
pk denotes the acceleration, etc. For example, the target’s state of order o = 3 consists of
position, velocity and acceleration. The system process noise over the time interval ti:k is
modeled as a Wiener process as defined in [24] and is denoted qi:k = N (0, Q (ti:k)) ∈ Ro∗n.
Let
A =
0n×n In×n 0n×n · · · 0n×n
0n×n 0n×n In×n · · · 0n×n...
......
. . ....
0n×n 0n×n 0n×n · · · In×n
0n×n 0n×n 0n×n · · · 0n×n,
(13.5)
be an o∗n×o∗n matrix with block identity matrices on the off diagonal. The state transition
function is defined as
xk = f (xi, qi:k, ti:k)
= expm (Ati:k) xi + qi:k, (13.6)
187

where expm is the matrix exponential. The Jacobians of the state transition function are
are
Fi:k=∂f
∂x
∣∣∣∣ζfi:k
= expm (Ati:k) (13.7)
Gi:k=∂f
∂q
∣∣∣∣ζfi:k
= Io∗n×o∗n. (13.8)
We assume that the target’s position is measured by the sensor; thus, the measure-
ment is defined as zk ∈ Rn and the measurement noise is denoted as rk ∼ N (0, R) ∈ Rn.
Let
C =[
In×n 0n×(o−1)∗n
]
, (13.9)
then the observation function is
zk = h (xk, rk)
= Cxk + rk, (13.10)
and its Jacobians are
Hk=∂h
∂x
∣∣∣∣ζhk
= C (13.11)
Vk=∂h
∂r
∣∣∣∣ζhk
= In×n. (13.12)
For LTI target models of any order, the exponential map and its Jacobians are still
the identity map.
13.2 Experiment
The experiment consists of tracking three quadrotors in a motion capture room for
40 seconds using a realsense D435i camera running at 10 frames per second with image
dimensions 640 × 480. The measurements from the DNN are given to G-MTT to produce
188

confirmed tracks. The confirmed tracks’ poses are compared against true pose data measured
by the motion capture system.
The targets are tracked using four different implementation of G-MTT where each
implementation uses one of the four target models: SE (3)-CV, LTI-CV, LTI-CA, and LTI-
CJ. In each implementation we use the same parameters. The process noise covariance
is set to Q (ti:k) = 0.05ti:kI, the initial error covariance to P0 = 0.25I, the measurement
noise covariance to R = 0.05I, the spacial density of false measurements to λ = 1e−5 since
the sensor produces few false measurements, the probability of detection to PD = 0.8, the
gate probability to PG = 0.7, the minimum subset of measurement used to create a state
hypothesis to τRSC = 4 with a minimum score requirement of τRmS = 7 to be initialized
into a track, and the probability of a measurement being an inlier to a state hypothesis to
PI = 0.7.
In our experiment, a track is considered a true track if it is within a Euclidean
positional distance of 0.5 meters. In the case that two or more tracks are within that
distance to a target, the closer track is assumed to be the true track and the other false.
To compare the different implementations we use the following performance measures:
average number of missed targets (AMT), average number of false tracks (AFT), average
Euclidean error (AEE) in position, and the track probability of detection (TPD) as described
in [88]. The track probability of detection is the probability that if a target exists, it is being
tracked. The statistical data for the performance measures are recorded whenever truth
states from the motion capture room are available for all three quadrotors providing a total
of 3415 data samples. A visualization of the experiment is at https://www.youtube.com/wa
tch?v=NRwcyZJHvmg&list=PLYgEzAHuTvsAvUDxpraTkIfxcIAQ5wSIu&index=11&ab chann
el=MAGICCLab. The visualization shows the video from the camera with the measurements
and the tracks from the different implementations of G-MTT drawn on the video. An image
from the video is shown in Figure 13.1. The performance measures of the experiment are
shown in Table 13.1.
As shown in Table 13.1, the SE (3)-CV target model had the lowest average Euclidean
error, the highest track probability of detection and the lowest average number of false tracks
and missed targets. Thus, this target model performed better than the others. The LTI-CV
189

Figure 13.1: A visualization of the experiment. The image on the left shows the bounding boxesproduced by the DNN. The images on the right shows the tracks produced by the different imple-mentations of G-MTT. The tracks for the SE (3)-CV are shown using bounding boxes to indicatethe orientation and position, and the tracks for the LTI models are shown as points since onlypositional data is provided by the LTI models.
Table 13.1: The performance measures of the experiment
AEE TPD AFT AMTSE (3)-CV 0.11658 0.93079 0.36164 0.19649LTI-CV 0.12207 0.91346 0.441 0.24568LTI-CA 0.12092 0.89933 0.65827 0.2858LTI-CJ 0.13533 0.64332 0.76105 1.0126
target model had the second best performance with slightly worse performance measures
than the SE (3)-CV target model. The LTI-CJ target model had the third best performance
with slightly worse performance than the LTI-CV target model. The LTI-CJ target model
performed poorly and had the worse performance. This was a surprising result since the
results in [22], [23], [130] showed that the constant jerk model outperformed lower-order,
LTI target models.
We investigated what caused the constant jerk model to perform poorly and dis-
covered the cause to be in the track initialization scheme. G-MTT uses a least squares
regression algorithm to generate the state hypothesis as discussed in Chapter 8. When the
190

Table 13.2: Linear Least Squares Regression Results
AEE Position AEE VelocityLTI-CV 0.2381 0.5849LTI-CA 0.2914 2.0731LTI-CJ 0.3065 4.7125
process noise and measurement noise are large, the state hypothesis for higher-order models
can have significant errors in the velocity, acceleration and jerk. To demonstrate this, we
ran a Monte Carlo simulation consisting of 1e4 iterations. In each iteration, we performed
the linear regression algorithm in Chapter 8 using five position measurements to compute
the state estimate for the LTI constant-velocity, acceleration, and jerk target models. The
position and velocity components of the state for each target model were randomly initialized
and the acceleration and jerk components were set to zero for the constant acceleration and
jerk models. The process noise was set to zero, the measurement noise covariance was set
to R = 0.05I and the time step was set to 0.166 seconds to simulate a frame rate of 10fps.
We then calculated the average Euclidean error in position and velocity for each state target
model. The results are shown in Table 13.2.
Table 13.2 shows that the initial state estimate in the target’s position and velocity
gets worse as the order of the target model increases. Note that the error in position is
similar, but the error in velocity greatly increases as the order of the target model increases.
This explains why the higher-order tracks were able to initialize but quickly drift away from
the target’s true position.
The track initialization issue is mitigated in [23] by using three measurements to
estimate the position, velocity and acceleration of the target and initializing the jerk to zero.
Similarly in [22], the linear regression algorithm presented in [63] was used to estimate the
target’s position and velocity while the acceleration and jerk were initialized to zero. These
methods are valid under the assumption that the target has constant velocity or acceleration.
We did not implement these track initialization schemes since we wanted to stay true to the
original algorithm presented in [63].
191

13.3 Conclusion
In this chapter we have shown how to use G-MTT to track targets that evolves on
SE (3) using a monocular camera. To track the targets, we implemented four versions of G-
MTT where each version used one of the following target models: SE (3)-CV, LTI-CV, LTI-
CA and LTI-CJ. We implemented these different versions to see how the SE (3)-CV compares
against the higher-order LTI models when tracking targets. Our experiment showed that the
target model SE (3)-CV outperformed the other target models in tracking three multirotors.
192

CHAPTER 14. CONCLUSION AND FUTURE RESEARCH
The main contribution of this dissertation is the presentation of the novel MTT algo-
rithm G-MTT that implements the different MTT components to work with target models
defined on Lie groups. This dissertation also serves as a guide on how other MTT algorithms
can be modified to work with geometric target models. As part of the presentation we pro-
vide various experimental results that strengthen the argument that a geometric approach
to target modeling improves tracking performance.
In Chapter 4 the main contribution is the definition of a discrete, constant-velocity
system model designed on generic, geodesically-complete, unimodular Lie groups. We also
derived the system model Jacobians. This generic system model allows G-MTT to be applied
to any geodesically-complete, unimodular Lie group. In Chapter 5 the main contribution is
the definition of a cluster where the measurements are defined on Lie groups. We also show
how to compare measurements from different sensors on the condition that the sensors are
compatible.
In Chapter 6 the main contribution is deriving the LG-IPDAF algorithm which is
the extension of the IPDAF algorithm presented in [38] to Lie groups. The LG-IPDAF
algorithm is capable of associating measurements to tracks using a validation region defined
on Lie groups and propagating and updating a track’s state estimate, error covariance and
track likelihood. In this chapter we also demonstrated the LG-IPDAF in simulation by
tracking a car on SE (2) and compared its performance to the IPDAF which tracked the
same car using an LTI-CV target model. The experimental results showed that tracking
on SE (2) as compared to tracking using the LTI-CV model significantly improves tracking
performance.
In Chapter 7 the main contribution is the derivation of the parallel centralized mea-
surement fusion with the LG-IPDAF called MS-LG-IPDAF to allow tracking using multiple
193

sensors. In the same chapter, we compared the MS-LG-IPDAF algorithm to sequential cen-
tralized measurement fusion with the LG-IPDAF and concluded that the tracking perfor-
mance of both algorithms are about the same, and that the sequential algorithm is preferred
since it is more computationally efficient.
In Chapter 8 the main contribution is the derivation of a track initialization scheme
designed on Lie groups that is robust to outliers. The main contribution of Chapter 9 is
the derivation of a track-to-track association and fusion algorithm for tracks whose states
are modeled on Lie groups under the assumption that the tracks are independent. The
main contribution of Chapter 10 is the derivation of an algorithm to deal with measurement
latency for system models designed on Lie groups.
In Chapter 11 the main contribution is the novel end-to-end target tracking and fol-
lowing algorithm designed to track multiple ground targets and to follow a single ground
target using a monocular camera fixed to a UAV. As part of the algorithm, we present
an algorithm called apparent feature motion that is capable of detecting moving features
across images and producing point measurements of those moving features. These moving
features correspond to moving targets that we wish to track. We show how to transform
measurements and tracks from the previous image plane to the current image plane using
the homography as the UAV moved. We design a novel image-based, visual-servoing, target
following controller that is non-linear and proved that it is globally stable. Lastly, we demon-
strate the end-to-end target tracking and following algorithm by tracking and following a
moving target in simulation.
In Chapter 12 the main contribution is the adaptation of the end-to-end target track-
ing and following algorithm presented in Chapter 11 to track targets using a target model
defined on SE (2). We prove that the system model on SE (2) is locally weakly observable.
We show how to seed the track initialization scheme to speed up the optimization algo-
rithm used to find a state hypothesis. We derive a transformation using the homography to
transform tracks on SE (2) from the previous tracking frame to the current tracking frame.
Lastly, we compare the tracking performance of the target model on SE (2) to the LTI-CV
target model in simulation and hardware. The experiment shows that the target model on
SE (2) significantly outperforms the LTI-CV target model.
194

In Chapter 13 the main contributing is showing how the G-MTT can be used to track
targets on SE (3) that are observed by a monocular camera using a deep neural network to
detect the targets and provide the targets’ relative poses to the camera frame to G-MTT.
We compare the tracking performance of the constant-velocity target model on SE (3) to
the tracking performance of the LTI constant-velocity, constant-acceleration, and constant-
jerk target models and find that the target model on SE (3) outperformed all other target
models.
14.1 Future Research
There are many things regarding G-MTT that deserve further research. In this section
we only discuss two of them.
14.1.1 Higher Order System Model
G-MTT assumes that the targets have constant velocity. A constant velocity target
model only captures the kinematics of the target, but not the dynamics. The dynamics
express how forces are able to act on the target and captures holonomic constraints. For
example, the kinematics of a car indicates that the car can move in any direction; however,
the dynamics of a car includes the holonomic constraints and indicates that a car can only
move in the direction of its heading. The corresponding process noise would capture that
behavior by having large process noise along the direction of its heading and small process
noise along any direction perpendicular to its heading.
To include holonomic constraints, the target’s state would be augmented to include
acceleration and a new system model would have to be designed. Depending on the Lie
group, the new system model may have to be continuous. A continuous system model would
require a numerical integration scheme to propagate the tracks on the manifold like the one
presented [134]–[136]. There are other parts of the algorithm that would need to be modified
to accommodate this higher order system model.
195

14.1.2 Measurement Management
G-MTT assumes that all of the sensors are compatible in the sense that we can form
some metric to compare the difference between measurements of different sensors. This
comparison is what allows G-MTT to assign measurements to clusters. However, it is not
always the case that sensors are compatible. For example, a common sensing modality is to
use cameras and radars to observe the target where a camera observes the target’s line of sight
vector from the camera to the target (providing a heading) and a radar observes the relative
depth. There is no direct way to compare the measurements from the two sensors, and
so we cannot use the measurement management strategy presented in Chapter 5 to assign
the measurements to clusters. A possible approach to solve this issue is to use a graph-
based framework like the one presented in [137] that tries to find large sets of measurements
consistent with the system model, and use these measurements to form a cluster. This way
we are not comparing the measurement directly but through the relation given by the system
model.
196

REFERENCES
[1] A. Rathore, A. Sharma, N. Sharma, and V. Guttal, “Multi-Object Tracking in Het-erogeneous Environments (MOTHe) for Animal Space-use Studies,” 2020. 1
[2] T. Hong, W. Zhang, W. Chen, X. Chen, and X. Fu, “Multi-target tracking of birds incomplex low-altitude airspace based on GM PHD filter,” The Journal of Engineering,vol. 2019, no. 21, pp. 7672–7676, 2019. 1
[3] X. Lu and D. Li, “Research on Target Detection and Tracking System of RescueRobot,” 2017 Chinese Automation Congress (CAC), pp. 6623–6627, 2017. 1
[4] K. Yun, L. Nguyen, T. Nguyen, D. Kim, S. Eldin, A. Huyen, T. Lu, andE. Chow, “Small target detection for search and rescue operations using distributeddeep learning and synthetic data generation,” SPIE 10995, Pattern Recognitionand Tracking XXX, vol. 10995, no. May 2019, p. 6, 2019. [Online]. Available:https://doi.org/10.1117/12.2520250 1
[5] H. Morgan, “Small-Target Detection and Observation with Vision-Enabled Fixed-Wing Unmanned Aircraft Systems,” Ph.D. dissertation, Brigham Young University,2021. [Online]. Available: https://scholarsarchive.byu.edu/etd/8998 1
[6] I. Hwang, H. Balakrishnan, K. Roy, and C. Tomlin, “Multiple-target tracking and iden-tity management with application to aircraft tracking,” Journal of Guidance, Control,and Dynamics, vol. 30, no. 3, pp. 641–653, 2007. 1
[7] W. S. Chen, J. Liu, and J. Li, “Classification of UAV and bird target in low-altitudeairspace with surveillance radar data,” The Aeronautical Journal, vol. 123, no. 1260,pp. 191–211, feb 2019. [Online]. Available: https://www.cambridge.org/core/product/identifier/S0001924018001586/type/journal article 1
[8] X Rong Li and V. P. Jilkov, “Survey of Maneuvering Targettracking. Part I: DynamicModels,” IEEE Transactions on Aerospace and Electronic Systems, vol. 39, no. 4, pp.1333–1364, 2003. [Online]. Available: http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=1261132 2, 4, 185
[9] R. Schubert, C. Adam, M. Obst, N. Mattern, V. Leonhardt, and G. Wanielik, “Em-pirical Evaluation of Vehicular Models for Ego Motion Estimation,” IEEE IntelligentVehicles Symposium, Proceedings, no. Iv, pp. 534–539, 2011. 2, 185
[10] F. Bullo, A. D. Lewis, and B. Goodwine, Geometric Control of Mechanical Systems.New York: Springer Science+Business Media, LCC, 2005, vol. 50, no. 12. 3, 34
197

[11] J. G. Mangelson, M. Ghaffari, R. Vasudevan, and R. M. Eustice, “Characterizing theUncertainty of Jointly Distributed Poses in the Lie Algebra,” arXiv, pp. 1–19, 2019. 4
[12] T. D. Barfoot and P. T. Furgale, “Associating uncertainty with three-dimensional posesfor use in estimation problems,” IEEE Transactions on Robotics, vol. 30, no. 3, pp.679–693, 2014. 4
[13] T. Barfoot, State Estimation For Robotics. Cambridge University Press, 2019. 4, 34,47, 50
[14] J. Sola, J. Deray, and D. Atchuthan, “A Micro Lie theory for State Estimation inRobotics,” pp. 1–17, 2018. [Online]. Available: http://arxiv.org/abs/1812.01537 4,34, 50, 52
[15] F. C. Park, J. E. Bobrow, and S. R. Ploen, “A Lie Group Formulation of RobotDynamics,” The International Journal of Robotics Research, vol. 14, no. 6, pp. 609–618, 1995. 4
[16] T. Lee, M. Leok, and N. H. Mcclamroch, “Geometric Tracking Control of a QuadrotorUAV on SE(3),” 49th IEEE Conference on Decision and Control (CDC), 2010. 4
[17] X. R. Li and V. P. Jilkov, “Survey of Maneuvering Target Tracking. Part II: MotionModels of Ballistic and Space Targets,” IEEE Transactions on Aerospace and Elec-tronic Systems, vol. 46, no. 1, pp. 96–119, 2010. 4
[18] ——, “Survey of maneuvering target tracking: Part III. Measurement models,” Signaland Data Processing of Small Targets 2001, vol. 4473, no. November 2001, p. 423,2001. 4
[19] ——, “A Survey of Maneuvering Target Trackin. Part IV: Decision-Based Methods,”Signal and Data Processing of Small Targets 2002, vol. 4728, no. April, pp. 511–534,2002. 4
[20] ——, “Survey of maneuvering target tracking. Part V: Multiple-model methods,” IEEETransactions on Aerospace and Electronic Systems, vol. 41, no. 4, pp. 1255–1321, 2005.4, 17
[21] X.-R. Li and V. P. Jilkov, “A survey of maneuvering target tracking. Part VI: ap-proximation techniques for nonlinear filtering,” Signal and Data Processing of SmallTargets 2004, vol. 5428, no. August 2004, pp. 537–550, 2004. 4
[22] K. Ingersoll, P. C. Niedfeldt, and R. W. Beard, “Multiple Target Tracking and Sta-tionary Object Detection in Video with Recursive-RANSAC and Tracker-Sensor Feed-back,” 2015 International Conference on Unmanned Aircraft Systems, ICUAS 2015,pp. 1320–1329, 2015. 6, 24, 185, 190, 191
[23] K. Mehrotra and P. R. Mahapatra, “A Jerk Model for Tracking Highly ManeuveringTargets,” IEEE Transactions on Aerospace and Electronic Systems, vol. 33, no. 4, pp.1094–1105, 1997. 6, 185, 190, 191
198

[24] D. J. Higham, “An Algorithmic Introduction to Numerical Simulation of StochasticDifferential Equations,” SIAM Review, vol. 43, no. 3, pp. 525–546, 2001. 11, 56, 187
[25] M. P. do. Carmo and M. P. do. Carmo, Riemannian Geometry. Birkhauser Boston,1992. 12, 41, 42, 43
[26] M. D. Shuster, “A Survey of Attitude Representations,” The Journal of the Astronau-tical Sciences, vol. 41, no. 4, pp. 439–517, 1993. 14
[27] A. W. Long, C. K. Wolfe, M. J. Mashner, and G. S. Chirikjian, “The banana dis-tribution is Gaussian: A localization study with exponential coordinates,” Robotics:Science and Systems, vol. 8, pp. 265–272, 2013. 16, 55
[28] A. F. Genovese, “The interacting multiple model algorithm for accurate state estima-tion of maneuvering targets,” Johns Hopkins APL Technical Digest (Applied PhysicsLaboratory), vol. 22, no. 4, pp. 614–623, 2001. 16
[29] M. R. Yap, “ScholarWorks @ UNO University of New Orleans Theses and BiomassIntegrated Gasification Combined Cycles ( BIGCC ),” Ph.D. dissertation, Universityof New Orleans, 2004. 17
[30] R. R. Pitre, V. P. Jilkov, and X. R. Li, “A comparative study of multiple-modelalgorithms for maneuvering target tracking,” Signal Processing, Sensor Fusion, andTarget Recognition XIV, vol. 5809, p. 549, 2005. 17
[31] J. M. Lee, An Introduction to Smooth Manifolds. Springer Science+Business Media,LCC, 2013. 18, 34
[32] G. De Moura Magalhaes, E. Dranka, Y. Caceres, J. B. Do Val, and R. S. Mendes,“EKF on Lie Groups For Radar Tracking Using Polar and Doppler Measurements,”2018 IEEE Radar Conference, RadarConf 2018, vol. 1573, no. 1, pp. 1573–1578, 2018.18, 185
[33] J. Kwon and F. C. Park, “Visual tracking via particle filtering on the affine group,”International Journal of Robotics Research, vol. 29, no. 2-3, pp. 198–217, 2010. 18
[34] J. Kwon, M. Choi, F. C. Park, and C. Chun, “Particle filtering on the Euclidean group:Framework and applications,” Robotica, vol. 25, no. 6, pp. 725–737, 2007. 18
[35] C. Choi and H. I. Christensen, “Robust 3D visual tracking using particle filteringon the SE(3) group,” Proceedings - IEEE International Conference on Robotics andAutomation, no. 3, pp. 4384–4390, 2011. 18
[36] G. Bourmaud, R. Megret, A. Giremus, and Y. Berthoumieu, “Discrete ExtendedKalman Filter on Lie groups,” European Signal Processing Conference, pp. 1–5, 2013.18, 55
[37] J. Cesic, I. Markovic, I. Cvisic, and I. Petrovic, “Radar and stereo visionfusion for multitarget tracking on the special Euclidean group,” Roboticsand Autonomous Systems, vol. 83, pp. 338–348, 2016. [Online]. Available:http://dx.doi.org/10.1016/j.robot.2016.05.001 18, 21, 72
199

[38] D. Musicki and R. Evans, “Joint Integrated Probabilistic Data Association - JIPDA,”IEEE Transactions on Aerospace and Electronic Systems, vol. 40, no. 3, pp. 1093–1099,2004. 18, 21, 25, 193
[39] R. Kalman and R. Bucy, “New Results in Linear Filtering and Prediction Theory,”Journal of Basic Engineering, pp. 95–108, 1961. 19
[40] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. Cambridge: MassachusettsInstitue of Technology, 2006. 19, 209
[41] G. Pulford, “Taxonomy of Multiple Target Tracking Methods,” IEE Proceedings-Radar, Sonar and Navigation, vol. 152, no. 4, pp. 291–304, 2005. [Online]. Available:http://arxiv.org/abs/1409.7618 19
[42] Y. Bar-Shalom and F. T. E., Tracking and Data Association. Academin Press, Inc.,1988. 19, 71
[43] N. Bhatia and Vandana, “Survey of Nearest Neighbor Techniques,” InternationalJournal of Computer Science and Information Security, vol. 8, no. 2, pp. 302–305,2010. [Online]. Available: http://arxiv.org/abs/1007.0085 19, 71
[44] P. Konstantinova, A. Udvarev, and T. Semerdjiev, “A study of a Target TrackingMethod Using Global Nearest Neighbor Algorithm,” International Conference on Com-puter Systems and Technologies, 2003. 19, 71
[45] Y. Bar-Shalom and E. Tse, “Tracking in a cluttered environment with probabilisticdata association,” Automatica, vol. 11, no. 5, pp. 451–460, 1975. 20, 72
[46] Y. Bar-Shalom, F. Daum, and J. Huang, “The Probabilistic Data Association Fil-ter: Estimation in the Presence of Measurement Origin Uncertainty,” IEEE ControlSystems, vol. 29, no. 6, pp. 82–100, 2009. 20, 72
[47] D. Musicki, R. Evans, and S. Stankovic, “Integrated Probabilistic Data Association,”IEEE Transactions on Automatic Control, vol. 39, no. 6, pp. 1237–1241, 1994. 20, 72,78
[48] S. S. Blackman, “Multiple hypothesis tracking for multiple target tracking,” IEEEAerospace and Electronic Systems Magazine, vol. 19, no. 1 II, pp. 5–18, 2004. 21, 72
[49] T. Sathyan, T. J. Chin, S. Arulampalam, and D. Suter, “A multiple hypothesis trackerfor multitarget tracking with multiple simultaneous measurements,” IEEE Journal onSelected Topics in Signal Processing, vol. 7, no. 3, pp. 448–460, 2013. 21
[50] D. B. Reid, “An Algorithm for Tracking Multiple Targets,” IEEE Transactions onAutomatic Control, vol. 24, no. 6, 1979. 21
[51] T. Kurien, “Issues in the Design of Practical Multitarget Tracking Algorithms,”Multitarget-multisensor tracking: advanced applications, pp. 43–83, 1990. 21
[52] R. L. Streit and T. E. Luginbuhl, “Probabilistic Multi-Hypothesis Tracking,” NavalUndersea Warfare Center Division Newport, Tech. Rep., 1995. 22
200

[53] T. Luginbuhl, Y. Sun, and P. Willett, “A Track Management System for the PMHTAlgorithm,” 2010. 22
[54] A. P. Dempster, N. M. Laird, and D. B. Rubin, “Maximum Likelihood from Incom-plete Data Via the EM Algorithm,” Journal of the Royal Statistical Society: Series B(Methodological), vol. 39, no. 1, pp. 1–22, 1977. 22
[55] D. F. Crousey, M. Guerrieroy, P. Willetty, R. Streitz, and D. Dunham, “A look at thePMHT,” 2009 12th International Conference on Information Fusion, FUSION 2009,vol. 4, no. 2, pp. 332–339, 2009. 22
[56] R. P. S. Mahler, “A Theoretical Foundation for the Stein-Winter ”ProbabilityHypothesis Density (PHD)” Multitarget Tracking Approach,” Proc. 2000 MSSNat’l Symp. on Sensor and Data Fusion,, vol. 1, 2000. [Online]. Available:http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA400161 22
[57] Z. Prihoda, A. Jamgochian, B. Moore, and B. Lange, “Probability Hypothesis DensityFilter Implementation and Application,” 2019. 23
[58] R. Maher, “A survey of PHD filter and CPHD filter implementations,” Signal Process-ing, Sensor Fusion, and Target Recognition XVI, vol. 6567, no. May 2007, p. 65670O,2007. 23
[59] P. C. Niedfeldt, “Recursive-RANSAC: A Novel Algorithm for Tracking MultipleTargets in Clutter,” All Theses and Dissertations, no. July, p. Paper 4195, 2014.[Online]. Available: http://scholarsarchive.byu.edu/etd/4195 23, 24
[60] M. A. Fischler and R. C. Bolles, “Random Sample Consensus: A Paradigm for ModelFitting with Applications to Image Analysis and Automated Cartography,” Graphicsand Image Processing, vol. 24, no. 6, pp. 381–395, 1981. 23, 24, 31, 119, 150
[61] A. Vedaldi, H. Tin, P. Favaro, and S. Soatto, “KALMANSAC: Robust filtering byconsensus,” Proceedings of the IEEE International Conference on Computer Vision,vol. I, pp. 633–640, 2005. 23
[62] P. C. Niedfeldt and R. W. Beard, Recursive RANSAC: Multiple SignalEstimation with Outliers. IFAC, 2013, vol. 9, no. PART 1. [Online]. Available:http://dx.doi.org/10.3182/20130904-3-FR-2041.00213 24
[63] ——, “Multiple Target Tracking using Recursive RANSAC,” Proceedings of the Amer-ican Control Conference, pp. 3393–3398, 2014. 24, 25, 126, 145, 158, 185, 191
[64] ——, “Robust Estimation with Faulty Measurements using Recursive-RANSAC,” Pro-ceedings of the IEEE Conference on Decision and Control, vol. 2015-Febru, no. Febru-ary, pp. 4160–4165, 2014. 24
[65] ——, “Convergence and Complexity Analysis of Recursive-RANSAC: A New MultipleTarget Tracking Algorithm,” IEEE Transactions on Automatic Control, vol. 61, no. 2,pp. 456–461, 2016. 24
201

[66] K. Ingersoll, “Vision Based Multiple Target Tracking Using Recursive RANSAC,”Ph.D. dissertation, Brigham Young University, 2015. 24
[67] P. C. Defranco, R. W. Beard, K. F. Warnick, and T. W. Mclain, “Detecting andTracking Moving Objects from a Small Unmanned Air Vehicle,” Ph.D. dissertation,Brigham Young University, 2015. 24
[68] P. C. Lusk and R. W. Beard, “Visual Multiple Target Tracking from a DescendingAerial Platform,” Proceedings of the American Control Conference, vol. 2018-June,pp. 5088–5093, 2018. 24
[69] P. C. Niedfeldt, K. Ingersoll, and R. W. Beard, “Comparison and Analysis of Recursive-RANSAC for Multiple Target Tracking,” IEEE Transactions on Aerospace and Elec-tronic Systems, vol. 53, no. 1, pp. 461–476, 2017. 24
[70] J. K. Wikle, “Integration of a Complete Detect and Avoid System for Small UnmannedAircraft Systems,” Ph.D. dissertation, Brigham Young University, 2017. 24
[71] J. Millard, “Multiple Target Tracking in Realistic Environments Using Recursive-RANSAC in a Data Fusion Framework,” Ph.D. dissertation, Brigham YoungUniversity, 2017. [Online]. Available: http://hdl.lib.byu.edu/1877/etd9640 24
[72] F. Yang, W. Tang, and H. Lan, “A Density-Based Recursive RANSAC Algorithm forUnmanned Aerial Vehicle Multi-Target Tracking in Dense Clutter,” IEEE Interna-tional Conference on Control and Automation, ICCA, no. k 1, pp. 23–27, 2017. 24,25
[73] F. Yang, W. Tang, and Y. Liang, “A Novel Track Initialization Algorithm Basedon Random Sample Consensus in Dense Clutter,” International Journal of AdvancedRobotic Systems, vol. 15, no. 6, pp. 1–11, 2018. 24
[74] Y. Bar-Shalom, P. Willett, and X. Tian, Tracking And Data Fusion: A Handbook ofAlgorithms. YBS Publishing, 2011. 25, 71, 81, 87, 129
[75] C. Hertzberg, R. Wagner, U. Frese, and L. Schroder, “Integrating generic sensor fu-sion algorithms with sound state representations through encapsulation of manifolds,”Information Fusion, 2013. 34
[76] J. Stillwell, Naive Lie Theory. Springer Science+Business Media, LCC, 2008. 34
[77] B. C. Hall, Lie Groups, Lie Algebras, and Representations: An Elementary Introduc-tion. Springer-Verlag New York, Inc, 2003. 34, 48, 50
[78] R. Abraham, J. Mardsen, and T. Ratiu, Manifolds, Tensor Analysis, and Applications,1st ed. New York: Springer-Verlag, 1998. 34
[79] J. Sola, “Quaternion kinematics for the error-state Kalman filter,” CoRR, vol.abs/1711.0, 2017. [Online]. Available: http://arxiv.org/abs/1711.02508 46, 76
202

[80] K. Engø, “Partitioned Runge-Kutta Methods in Lie-group Setting,” Reportsin Informatics, vol. 43, no. 202, pp. 21–39, 2000. [Online]. Available: http://www.ii.uib.no/publikasjoner/texrap/ps/2000-202.ps 52
[81] Y. Wang and G. S. Chirikjian, “Error Propagation on the Euclidean Group with Ap-plications to Manipulator Kinematics,” IEEE Transactions on Robotics, vol. 22, no. 4,pp. 591–602, 2006. 54
[82] Y. Kim and A. Kim, “On the Uncertainty Propagation: Why Uncertainty on LieGroups Preserves Monotonicity?” IEEE International Conference on IntelligentRobots and Systems, vol. 2017-Septe, pp. 3425–3432, 2017. 55
[83] G. Bourmaud, R. Megret, M. Arnaudon, and A. Giremus, “Continuous-Discrete Ex-tended Kalman Filter on Matrix Lie Groups Using Concentrated Gaussian Distribu-tions,” Journal of Mathematical Imaging and Vision, vol. 51, no. 1, pp. 209–228, 2014.55
[84] A. M. Sjøberg and O. Egeland, “An EKF for Lie Groups with Application to CraneLoad Dynamics,” Modeling, Identification and Control, vol. 40, no. 2, pp. 109–124,2019. 57, 76
[85] A. Wald, Sequential Analysis. New York: John Wiley & Sons Inc, 1947. 71
[86] X. R. Li, N. Li, and V. P. Jilkov, “SPRT-Based track confirmation and rejection,”Proceedings of the 5th International Conference on Information Fusion, FUSION 2002,vol. 2, pp. 951–958, 2002. 72
[87] Y. Bar-Shalom, X.-R. Li, and T. Kirubarajan, Estimation with Applications to Track-ing and Navigation. John Wiley & Sons, Inc, 2001, vol. 9. 85, 106
[88] A. A. Gorji, R. Tharmarasa, and T. Kirubarajan, “Performance Measures for MultipleTarget Tracking Problems,” Fusion 2011 - 14th International Conference on Informa-tion Fusion, pp. 1560–1567, 2011. 91, 114, 183, 189
[89] G. W. Pulford and R. J. Evans, “Probabilistic Data Association for Systems withMultiple Simultaneous Measurements,” Automatica, vol. 32, no. 9, pp. 1311–1316,1996. 96
[90] W. Saidani, Y. Morsly, and M. S. Djouadi, “Sequential Versus Parallel Architecturefor Multiple Sensors Multiple Target Tracking,” 2008 Conference on Human SystemInteraction, HSI 2008, pp. 903–908, 2008. 96, 97, 99, 117
[91] L. Y. Pao and C. W. Frei, “Comparison of Parallel and Sequential Implementations ofa Multisensor Multitarget Tracking Algorithm,” Proceedings of the American ControlConference, vol. 3, pp. 1683–1687, 1995. 96, 97, 117, 118
[92] C. W. Frei and L. Y. Pao, “Alternatives to Monte-Carlo Simulation Evaluations ofTwo Multisensor Fusion Algorithms,” Automatica, vol. 34, no. 1, pp. 103–110, 1998.96, 97, 117, 118
203

[93] D. Willner, C.-B. Chang, and K.-P. Dunn, “Kalman Filter Configurations for MultipleRadar Systems,” DTIC Document, vol. 0, no. April 1976, 1976. [Online]. Available:https://apps.dtic.mil/sti/citations/ADA026367 97
[94] E. H. Lee, D. Musicki, and T. L. Song, “Multi-sensor distributed fusion based on inte-grated probabilistic data association,” FUSION 2014 - 17th International Conferenceon Information Fusion, 2014. 97, 99
[95] W. Li, Z. Wang, G. Wei, L. Ma, J. Hu, and D. Ding, “A Survey on MultisensorFusion and Consensus Filtering for Sensor Networks,” Discrete Dynamics in Natureand Society, vol. 2015, 2015. 97
[96] M. E. Liggins, C. Y. Chong, I. Kadar, M. G. Alford, V. Vannicola, S. Thomopoulos,M. E. Liggins, M. G. Alford, and V. Vannicola, “Distributed fusion architectures andalgorithms for target tracking,” Proceedings of the IEEE, vol. 85, no. 1, pp. 95–106,1997. 97
[97] L. Y. Pao, “Centralized Multisensor Fusion Algorithms for Tracking Applications,”Control Engineering Practice, vol. 2, no. 5, pp. 875–887, 1994. 99
[98] S. Agarwal, K. Mierle, and Others, “Ceres Solver.” [Online]. Available:http://ceres-solver.org 126
[99] K. H. Kim, “Development of Track to Track Fusion Algorithms,” Proceedings of theAmerican Control Conference, vol. 1, pp. 1037–1041, 1994. 129
[100] Z. Deng, P. Zhang, W. Qi, J. Liu, and Y. Gao, “Sequential covariance intersectionfusion Kalman filter,” Information Sciences, vol. 189, pp. 293–309, 2012. [Online].Available: http://dx.doi.org/10.1016/j.ins.2011.11.038 129
[101] X. Tian, Y. Bar-Shalom, and G. Chen, “A No-Loss Covariance Intersection Algorithmfor Track-to-Track Fusion,” Signal and Data Processing of Small Targets 2010, vol.7698, no. April 2010, p. 76980S, 2010. 129, 136
[102] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified,real-time object detection,” Proceedings of the IEEE Computer Society Conference onComputer Vision and Pattern Recognition, vol. 2016-Decem, pp. 779–788, 2016. 144
[103] R. Girshick, J. Donahue, T. Darrell, and J. Malik, “Rich feature hierarchies for accu-rate object detection and semantic segmentation,” Proceedings of the IEEE ComputerSociety Conference on Computer Vision and Pattern Recognition, pp. 580–587, 2014.144
[104] Z. Q. Zhao, P. Zheng, S. T. Xu, and X. Wu, “Object Detection with Deep Learning:A Review,” IEEE Transactions on Neural Networks and Learning Systems, vol. 30,no. 11, pp. 3212–3232, 2019. 144
[105] S. Hutchinson, G. D. Hager, and P. I. Corke, “A tutorial on visual servo control,” IEEETransactions on Robotics and Automation, vol. 12, no. 5, pp. 651–670, 1996. 145
204

[106] D. Pebrianti, O. Y. Peh, R. Samad, M. Mustafa, N. R. Abdullah, and L. Bayuaji,“Intelligent control for visual servoing system,” Indonesian Journal of Electrical En-gineering and Computer Science, vol. 6, no. 1, pp. 72–79, 2017. 145
[107] P. I. Corke, “Spherical image-based visual servo and structure estimation,” Proceedings- IEEE International Conference on Robotics and Automation, pp. 5550–5555, 2010.145
[108] N. Liu and X. Shao, “Desired compensation RISE-based IBVS control of quadrotorsfor tracking a moving target,” Nonlinear Dynamics, vol. 95, no. 4, pp. 2605–2624,2019. [Online]. Available: https://doi.org/10.1007/s11071-018-4700-5 145
[109] H. Xie and A. Lynch, “Dynamic image-based visual servoing for unmanned aerialvehicles with bounded inputs,” Canadian Conference on Electrical and Computer En-gineering, vol. 2016-October, pp. 1–5, 2016. 145
[110] M. Petersen, C. Samuelson, and R. W. Beard, “Target Tracking and Following from aMultirotor UAV,” Current Robotics Reports, 2021. 145, 155
[111] J. Shi and C. Tomasi, “Good features to track,” in Proceedings of IEEE Conferenceon Computer Vision and Pattern Recognition CVPR-94. IEEE, 1994, pp. 593–600.148
[112] B. D. Lucas and T. Kanade, “An iterative image registration technique with an appli-cation to stereo vision,” in Proceedings of the Imaging Understanding Workshop, 1981,pp. 121–130. 148
[113] C. Tomasi and T. Kanade, “Detection and Tracking of Point Features,” CarnegieMellon University Technical Report CMU-CS-91-132, 1991. 148
[114] G. Bradski, “The OpenCV Library,” Dr. Dobb’s Journal of Software Tools, 2000. 148
[115] M. K. Kaiser, N. R. Gans, and W. E. Dixon, “Vision-Based Estimation for Guidance,Navigation, and Control of an Aerial Vehicle,” IEEE Transactions on Aerospace andElectronic Systems, vol. 46, no. 3, pp. 1064–1077, jul 2010. 150
[116] S. Choi, T. Kim, and W. Yu, “Performance Evaluation of RANSAC Family,” BritishMachine Vision Conference, BMVC 2009 - Proceedings, no. January, 2009. 150
[117] Y. Ma, S. Soatto, J. Kosecka, and S. S. Shankar, An Invitation to 3-D Vision FromImages to Geometric Models. Springer, 2010. 153
[118] D. Nister, “An Efficient Solution to the Five-Point Relative Pose Problem,” IEEETRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,vol. 26, no. 6, pp. 756–770, 2004. 153
[119] Z. Zou, Z. Shi, Y. Guo, and J. Ye, “Object Detection in 20 Years: A Survey,” pp.1–39, 2019. [Online]. Available: http://arxiv.org/abs/1905.05055 161
[120] L. Jiao, F. Zhang, F. Liu, S. Yang, L. Li, Z. Feng, and R. Qu, “A survey of deeplearning-based object detection,” IEEE Access, vol. 7, pp. 128 837–128 868, 2019. 161
205

[121] L. Liu, W. Ouyang, X. Wang, P. Fieguth, J. Chen, X. Liu, and M. Pietikainen,“Deep Learning for Generic Object Detection: A Survey,” International Journalof Computer Vision, vol. 128, no. 2, pp. 261–318, 2020. [Online]. Available:https://doi.org/10.1007/s11263-019-01247-4 161
[122] E. Teng, R. Huang, and B. Iannucci, “ClickBAIT-v2: Training an Object Detector inReal-Time,” 2018. [Online]. Available: http://arxiv.org/abs/1803.10358 161
[123] R. Hartley and A. Zisserman, Multiple View Geometry in computer vision. CambridgeUniversity Press, 2003. 162
[124] T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotoruav on se(3),” Proceedings of the IEEE Conference on Decision and Control, pp. 5420–5425, December 2010. 164
[125] N. Farmani, L. Sun, and D. Pack, “Tracking multiple mobile targets using cooperativeUnmanned Aerial Vehicles,” 2015 International Conference on Unmanned AircraftSystems, ICUAS 2015, pp. 395–400, 2015. 165
[126] L. Meier, D. Honegger, and M. Pollefeys, “Px4: A node-based multithreaded opensource robotics framework for deeply embedded platforms,” in 2015 IEEE InternationalConference on Robotics and Automation (ICRA), 2015, pp. 6235–6240. 165
[127] R. Hermann and A. J. Krener, “Nonlinear Controllability and Observability,” IEEETransactions on Automatic Control, vol. 22, no. 5, pp. 728–740, 1977. 172, 173
[128] N. D. Powel and K. A. Morgansen, “Empirical Observability Gramian for StochasticObservability of Nonlinear Systems,” arXiv, no. Cdc, pp. 6342–6348, 2020. 172, 173
[129] A. J. Krener and I. Kayo, “Measure of Unobservability,” in Joint 48th IEEE Conferenceof Decision and Control and 28th Chinese Control Conference, 2009. 172, 173
[130] Q. Meng, B. Hou, D. Li, Z. He, and J. Wang, “Performance Analysis and Comparisonfor High Maneuver Target Track Based on Different Jerk Models,” Journal of ControlScience and Engineering, vol. 2018, 2018. 185, 190
[131] J. Cesic, I. Markovic, and I. Petrovic, “Moving object tracking employing rigid bodymotion on matrix Lie groups,” 19th International Conference on Information Fusion(FUSION), Special Session on Directional Estimation, no. i, pp. 2109–2115, 2017. 185
[132] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C. Y. Fu, and A. C. Berg,“SSD: Single Shot Multibox Detector,” Lecture Notes in Computer Science (includingsubseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics),vol. 9905 LNCS, pp. 21–37, 2016. 186
[133] G. Wang, F. Manhardt, F. Tombari, and X. Ji, “GDR-Net: Geometry-Guided DirectRegression Network for Monocular 6D Object Pose Estimation,” 2021. [Online].Available: http://arxiv.org/abs/2102.12145 186
[134] H. Munthe-Kaas, “Lie-Butcher theory for Runge-Kutta methods,” BIT NumericalMathematics, vol. 35, no. 4, pp. 572–587, 1995. 195
206

[135] ——, “Runge-Kutta methods on Lie groups,” BIT Numerical Mathematics, vol. 38,no. 1, pp. 92–111, 1998. 195
[136] ——, “High order Runge-Kutta methods on manifolds,” Applied Numerical Mathe-matics, vol. 29, no. 1, pp. 115–127, 1999. 195
[137] P. C. Lusk, K. Fathian, and J. P. How, “Clipper: A graph-theoretic framework forrobust data association,” 2021. 196
207

APPENDIX A. PROOFS FOR THE LG-IPDAF
A.1 Proof of Lemma 6.2.2: Prediction Step
Proof. According to the theorem of total probability, the probability of the track’s current
state conditioned on the previous measurements and it representing the target is
p (xk | ϵk− , Z0:k−) =
∫
xk−|k−
p (xk | xk− , ϵk− , Z0:k−)
p (xk− | ϵk− , Z0:k−) dxk−|k− , (A.1)
where we integrate over the error state instead of the state by recalling that xk−|k− =
LogGxI
(
x−1k−|k−xk−
)
, and using the relation in equation (3.14a).
Substituting in the definitions of p (xk | xk− , ϵk− , Z0:k−) and p (xk− | ϵk− , Z0:k−) stated
in equations (6.8) and (6.3) into equation (A.1) and combining the exponents yields
p (xk | ϵk− , Z0:k−) ≈ η
∫
xk−|k−
exp (−L) dxk−|k− , (A.2)
where
L =1
2
(xk|k− − Fk−:kxk−|k−
)⊤Qk−:k
(xk|k− − Fk−:kxk−|k−
)
+1
2x⊤k−|k−P
−1k−|k− xk−|k− ,
and Qk−:k is defined in equation (6.6).
Taking the first and second derivatives of L with respect to xk−|k− yields
∂L
∂xk−|k−= −
(xk|k− − Fk−:kxk−|k−
)⊤Qk−:kFk−:k + x⊤k−|k−P
−1k−|k− (A.3a)
208

∂2L
∂x2k−|k−= Ψ−1 ≜ F⊤
k−:kQk−:kFk−:k + P−1k−|k− . (A.3b)
Setting the first derivative to zero and solving for xk−|k− yields
xk−|k− = ΨF⊤k−:kQ
−1k−:kxk.
Using the first and second partial derivatives of L in equation (A.3) we construct the
term
L1
(xk|k− , xk−|k−
)=
1
2
(xk−|k− −ΨF⊤
k−:kQ−1k−:kxk|k−
)⊤
Ψ−1(xk−|k− −ΨF⊤
k−:kQ−1k−:kxk|k−
),
which is quadratic in xk|k− . Subtracting L1
(xk|k− , xk−|k−
)from L gives the term
L2
(xk|k−
)=
1
2
(
x⊤k|k−(Q−1k−:k − Q−1
k−:kFk−:kΨF⊤k−:kQ
−1k−:k
)xk|k−
)
, (A.4)
which is quadratic in xk|k− and not dependent on xk−|k− . Applying the inversion lemma
presented in [40] to equation (A.4) and letting Pk|k− =(Fk−:kPk|k−F
⊤k−:k + Qk−:k
)gives
L2
(xk|k−
)=
1
2x⊤k|k−P
−1k|k− xk|k− .
Substituting in L1
(xk|k− , xk−|k−
)and L2
(xk|k−
)for L into equation (A.2) and pulling
out L2
(xk|k−
)from the integral since it is not dependent on xk−|k− yields
p (xk | ϵk− , Z0:k−) ≈ η exp(−L2
(xk|k−
))∫
xk−|k−
exp(−L1
(xk|k− , xk−|k−
))dxk−|k−
= η exp(−L2
(xk|k−
)),
where the term in the integral integrates to a constant that is absorbed by the normalizing
coefficient η as discussed in [40].
209

Recalling from Lemma 6.2.1 that xk|k− = f(xk−|k− , 0, tk−:k
)and noting that xk|k− =
LogGxI
(
x−1k|k−xk
)
, we get that p (xk | ϵk− , Z0:k−) ≈ N(xk|k− , Pk|k−
).
A.2 Proof of Lemma 6.4.1: Association Events
Proof. The probability of an association event conditioned on the measurements Z0:k and
that the track represents the target is inferred using the location of the validated measure-
ments with respect to the track’s estimated measurement zk = h(xk|k− , 0
)and the number of
validated measurements. The basic idea is that the closer a validated measurement is to the
estimated measurement relative to how close the other validated measurements are to the
estimated measurement, the more likely the validate measurement is the target-originated
measurement relative to the other validated measurements, and therefore the more likely its
respective association event it.
The probability of an association event conditioned on the measurements and the
track representing the target is
p (θk,j | ϵk, Z0:k) = p (θk,j | mk, Zk, ϵk, Z0:k−) (A.5)
where we have separated Zk and Z0:k− from Z0:k and explicitly written the inference on the
number of validated measurements mk. Using Bayes’ rule, the probability in equation (A.5)
is
p (θk,j | ϵk, Z0:k) =p (Zk | θk,j,mk, ϵk, Z0:k−) p (θk,j | mk, ϵk, Z0:k−)
p (Zk | mk, ϵk, Z0:k−)(A.6)
where
p (Zk | mk, ϵk, Z0:k−) =
mk∑
j=0
(p (Zk | θk,j,mk, ϵk, Z0:k−) p (θk,j | mk, ϵk, Z0:k−)) . (A.7)
210

Since the validated measurements are independent, the joint density of the validated
measurements is
p (Zk | θk,j,mk, ϵk, Z0:k−) =
mk∏
ℓ=1
p (zk,ℓ | θk,j, ϵk, Z0:k−) . (A.8)
Since the false measurements are assumed uniformly distributed in the validation
region with volume Vk, the probability of a false measurement in the validation region is
V−1k . Also, since the target originated measurement is validated with probability PG, the
probability of a target originated measurement being validated is P−1G p (zkℓ | ψ, ϵk, Z0:k−),
which is defined in equations (6.16) (6.20) and (6.21). Therefore, the probability of each
measurement conditioned on the respective association event is
p (zk,ℓ | θk,j, ϵk, Z0:k−) =
V−1k if j = ℓ
P−1G p (zk,ℓ | ψ, ϵk, Z0:k−) if j = ℓ
. (A.9)
Let m−k ≜ mk − 1, and M = 1, . . . ,mk. Substituting equation (A.9) into equation
(A.8) yields the joint probability of the measurements
p (Zk | θk,j,mk, ϵk, Z0:k−) =
V−m−k
k P−1G p (zk,j | ψ, ϵk, Z0:k−) if j ∈ M
V−mkk if j = 0
. (A.10)
We now proceed to calculate p (θk,j | mk, ϵk, Z0:k−). Let ϕ denote the number of false
measurements. Under the assumption that there is at most one target originated measure-
ment, there are two possibilities for the number of false measurements, ϕ = mk, denoted
ϕmk, or ϕ = m−
k denoted ϕm−k. Therefore, the a priori probability of an association event
conditioned on the number of measurements and previous measurements is
p (θk,j | mk, ϵk, Z0:k−) = p(
θk,j | ϕm−k,mk, ϵk, Z0:k−
)
p(
ϕm−k| mk, ϵk, Z0:k−
)
+ p (θk,j | ϕmk,mk, ϵk, Z0:k−) p (ϕmk
| mk, ϵk, Z0:k−)
211

=
(1mk
)
p(
ϕm−k| mk, ϵk, Z0:k−
)
j = 1, . . . ,mk
p (ϕmk| mk, ϵk, Z0:k−) j = 0,
(A.11)
where the probability p(
θk,j | ϕm−k,mk, ϵk, Z0:k−
)
= 1mk
when j > 0 since each association
event, θk,j>0, is just a likely to be true with the specified conditions, and the probability
p(
θk,j | ϕm−k,mk, ϵk, Z0:k−
)
= 0 when j = 0 since one validated measurement originated
from the target; thus, not all of the measurements are false.
Using Bayes’ formula, the conditional probabilities of the number of false measure-
ments are
p(
ϕm−k| mk, ϵk, Z0:k−
)
=p(
mk | ϕm−k, ϵk, Z0:k−
)
p(
ϕm−k| ϵk, Z0:k−
)
p (mk | Z0:k−)
=PGPDµF
(m−k
)
p (mk | ϵk, Z0:k−)(A.12)
and
p (ϕmk| mk, ϵk, Z0:k−) =
p (mk | ϕmk, ϵk, Z0:k−) p (ϕmk
| Z0:k−)
p (mk | ϵk, Z0:k−)
=(1− PGPD)µF (mk)
p (mk | ϵk, Z0:k−). (A.13)
where µF is the probability density function of the number of false measurements, and
p(
mk | ϕm−k, ϵk, Z0:k−
)
= PGPD since p(
mk | ϕm−k, ϵk, Z0:k−
)
is the probability that the tar-
get is detected and the target originated measurement is inside the validation region.
According to the theorem of total probability
p (mk | ϵk, Z0:k−) = p(
mk | ϕm−k, Z0:k−
)
p(
ϕm−k| ϵk, Z0:k−
)
+ p (mk | ϕmk, ϵk, Z0:k−) p (ϕmk
| ϵk, Z0:k−)
= PGPDµF(m−k
)+ (1− PGPD)µF (mk) . (A.14)
212

Substituting equations (A.12), (A.13), and (A.14) into equation (A.11) yields
p (θk,j | mk, ϵk, Z0:k−) =
1mk
PDPGµF (m−k )
PGPDµF (m−k )+(1−PGPD)µF (mk)
j ∈ M
(1−PGPD)µF (mk)
PGPDµF (m−k )+(1−PGPD)µF (mk)
j = 0
, (A.15)
where M = 1, 2, . . . ,mk is the indexing set of track associated measurements.
Substituting equations (A.10) and (A.11), into equation (A.7) yields
p (Zk | mk, ϵk, Z0:k−) =
V−m−
kk
mkPDµF
(m−k
)∑mk
ℓ=1 p (zk,ℓ | ψ, ϵk, Z0:k−)
PDPGµF(m−k
)+ (1− PDPG)µF (mk)
+V−mkk (1− PDPG)µF (mk)
PDPGµF(m−k
)+ (1− PDPG)µF (mk)
. (A.16)
Substituting equations (A.10), (A.11) and (A.16) into (A.6) yields
p (θk,j | ϵk, Z0:k) =
PDp(zk,j |ψ,ϵk,Z0:k−)PD
∑mkℓ=1 p(zk,j |ψ,ϵk,Z0:k−)+mkV
−1k (1−PDPG)
µF (mk)
µF (m−k )
j ∈ M
mkV−1k (1−PDPG)
µF (mk)
µF (m−k )
PD∑mk
ℓ=1 p(zk,j |ψ,ϵk,Z0:k−)+mkV−1k (1−PDPG)
µF (mk)
µF (m−k )
j = 0
(A.17)
Setting the probability density function of false measurements µF in equation (A.17)
to a Poisson density function defined in equation (6.2) yields equation (6.22) in Lemma 6.2.2.
A.3 Proof of Lemma 6.4.2: Split Track Update
Proof. Using Bayes rule,
p (xk,j | θk,j, ϵk, Z0:k) =p (Zk|θk,j, xk, ϵk, Z0:k−) p (xk | ϵk, Z0:k−)
p (Zk | θk,j, ϵk, Z0:k−). (A.18)
213

We solve for the probability p (xk,j | θk,j, ϵk, Z0:k) by using the maximum a posterior (MAP)
optimization algorithm to find the value of xk|k− and its corresponding error covariance Pk|k−
that maximizes the right hand side of equation (A.18).
Since the MAP does not depend on p (Zk | θk,j, ϵk, Z0:k−), it can be absorbed into the
normalizing coefficient simplifying the problem to
maxxk|k− ,Pk|k−
ηp (Zk|θk,j, xk, ϵk, Z0:k−) p (xk | ϵk, Z0:k−) .
In the case θk,j=0, none of the validated measurements are target originated; thus,
p(Zk|θk,j=0, xk, ϵk, Z0|k−
)simplifies to p (Zk|θk,j=0, Z0:k−) and no longer has any dependency
on the track’s state. This reduces the MAP optimization problem to
maxxk|k− ,Pk|k−
ηp (xk | ϵk, Z0:k−) ;
hence, the solution is p (xk,j=0 | θk,j=0, ϵk, Z0:k) = p (xk | ϵk, Z0:k−).
In the case θk,j>0, only the measurement zk,j has any dependency and influence on
the track’s state since all other measurements are false. Using this fact with the relation in
equation (A.9), the optimization problem simplifies to
maxxk|k− ,Pk|k−
ηP−1G p (zk,j|ψ, xk, ϵk, Z0:k−) p (xk | ϵk, Z0:k−) .
Multiplying the probabilities p(zk,α | ψ, xk, ϵk, ZS
0:k−
)and p
(xk | ϵk, ZS
0:k−
)defined in
equations (7.11) and (7.10) together, combining their exponents and dropping the terms P sℓG
since they have no impact on the optimization, simplifies the MAP optimization problem to
maxxk|k− ,Pk|k−
ηP−1G exp (−L) ,
where
L =1
2
(νk,j −Hkxk|k−
)⊤R−1k
(νk,j −Hkxk|k−
)+
1
2x⊤k|k−P
−1k|k− xk|k−
νk,j = LogGsI
(z−1k zk
)
214

zk = h(xk|k− , 0
)
Rk = VkRV⊤k ,
xk|k− = LogGxI
(
x−1k|k−xk
)
, h is the observation function defined in equation (4.1) and Hk and
Vk are the Jacobians of the observation function defined in equation (4.5) and evaluated at
ζhk =(xk|k− , 0
).
The MAP is solved by finding the value of xk|k− that minimizes L. Since L is quadratic
in xk|k− , the value of xk|k− that minimizes L is found by taking the first derivative of L with
respect to to xk|k− , setting it to zero and solving for xk|k− . This value becomes the new error
state mean µ−k|k. The corresponding covariance is found by taking the second derivative of
L with respect to xk|k− and setting this value to the new covariance P c−
k|k.
Taking the first and second partial derivatives of L with respect to xk|k− yields
∂L
∂xk|k−= −
(νk,j −Hkxk|k−
)⊤R−1k Hk + x⊤k|k−P
−1k|k−
∂2L
∂x2k|k−= H⊤
k R−1k Hk + P−1
k|k− =(
P c−
k|k
)−1
.
Setting the first derivative to zero, solving for xk|k− and setting this value to µ−k|k gives
µ−k|k =
(
H⊤k R
−1k Hk + P−1
k|k−
)−1
H⊤k R
−1k νk,j.
With algebraic manipulation the updated error covariance and error state mean are
P c−
k|k = (I −KkHk)Pk|k−
µ−k|k,j = Kkνk,j,
where the Kalman gain Kk and innovation term νk,j are
Kk = Pk|k−H⊤k Sk
νk,j = LogGsI
(z−1k zk,j
)
zk = h(xk|k− , 0
)
215

Sk = VkRV⊤k +HkPk|k−H
⊤k .
Since the error state’s mean is no longer zero, the error state no longer has a concen-
trated Gaussian distribution. In order to reset the mean of the error state to zero, we add
µ−k|k,j onto the state estimate xk|k− and adjust the covariance of the error state. In partic-
ular, let the error state after update but before being reset be x−k|k,j = µ−k|k,j + ak|k where
ak|k ∼ N(
0, P c−
k|k
)
, then under the assumption that ak|k is small and using the property of
the right Jacobian defined in equation (3.7) we add µ−k|k,j onto xk|k− as follows:
xk|k = xk|k−ExpGxI
(
µ−k|k,j + ak|k
)
(A.19a)
= xk|k−ExpGxI
(
µ−k|k,j
)
︸ ︷︷ ︸
xk|k,j
ExpGxI
JGxr
(
µ−k|k,j
)
ak|k︸ ︷︷ ︸
xk|k,j
, (A.19b)
where
xk|k,j = xk|k−ExpGxI
(
µ−k|k,j
)
, (A.20)
is the updated state estimate, and xk|k,j = JGxr
(
µ−k|k,j
)
ak|k is the updated error state after
reset. Equation (A.20) can be thought of as moving from xk|k− to xk|k,j along the geodesic
defined by the tangent vector µ−k|k,j as depicted in Fig. A.1.
The error covariance of the error state xk|k,j is
cov(xk|k,j
)= cov
(
JGxr
(
µ−k|k,j
)
ak|k
)
= JGxr
(
µ−k|k,j
)
cov(ak|k)JGxr
(
µ−k|k,j
)⊤
= JGxr
(
µ−k|k,j
)
P c−
k|kJGxr
(
µ−k|k,j
)⊤
= P ck|k;
therefore, xk|k,j ∼ N(
µk|k,j = 0, P ck|k,j
)
.
216

Figure A.1: A depiction of the state estimate update conditioned on θk,j by using µ−k|k,j to form a
geodesic from xk|k− to xk|k,j .
A.4 Proof of Lemma 6.4.3: Track Likelihood
Proof. The probability of the track likelihood conditioned on the measurements Z0:k are
inferred using the location of the validated measurements with respect to the track’s esti-
mated measurement zk = h(xk|k− , 0
)and the number of validated measurements. The basic
idea is that the more likely at least one of the validated measurements is target originated
compared to the likelihood that none of the validated measurements is target originated, the
more likely the track represents a target. Also, if the number of validated measurements
is more than the expected number of false measurements inside the validation region, then
the more likely one of the validated measurements originated from the target, and the track
represents the target.
We write the track likelihood conditioned on the measurements as
p (ϵk | Z0:k) = p (ϵk | mk, Zk, Z0:k−) (A.21)
where we have separated Zk and Z0:k− from Z0:k and explicitly written the inference on the
number of validated measurements mk. Using Bayes’ rule, equation (A.21) can be written
as
p (ϵk, | Z0:k) =p (Zk | ϵk,mk, Z0:k−) p (ϵk | mk, Z0:k−)
p (Zk | mk, Z0:k−), (A.22)
217

where
p (Zk | mk, Z0:k−) = p (Zk | ϵk,mk, Z0:k−) p (ϵk | mk, Z0:k−)
+ p (Zk | ϵk = F,mk, Z0:k−) p (ϵk = F | mk, Z0:k−) , (A.23)
and ϵk = F denotes that the track does not represent the target.
The probability p (Zk | mk, ϵk, Z0:k−) is derived in Appendix A.2 and defined in equa-
tion (A.16). The probability p (Zk | ϵk = F,mk, Z0:k−) is
p (Zk | ϵk = F,mk, Z0:k−) =
mk∏
j=1
p (zk,j | ϵk = F,mk, Z0:k−)
=
mk∏
j=1
V−1k
= V−mkk , (A.24)
because under the condition that the track does not represent the target, all of the vali-
dated measurements must be false, and the validated false measurements are assumed to be
independent and uniformly distributed in the validation region with volume Vk.Using Bayes’ rule we get
p (ϵk | mk, Z0:k−) =p (mk | ϵk, Z0:k−) p (ϵk |, Z0:k−)
p (mk | Z0:k−)(A.25)
and
p (ϵk = F | mk, Z0:k−) =p (mk | ϵk = F,Z0:k−) p (ϵk = F | Z0:k−)
p (mk | Z0:k−)(A.26)
The probability p (mk | ϵk, Z0:k−) is derived in Appendix A.2 and defined in equation
(A.14). The probability p (mk | ϵk = F,Z0:k−) is
p (mk | ϵk = F,Z0:k−) = µF (mk) , (A.27)
218

since all of the measurements are false under the condition that the track does not represent
a target.
Using the theorem of total probability with equations (A.14) and (A.27), the prob-
ability of the number of measurements mk conditioned on the previous measurements is
p (mk | Z0:k−) = p (mk | ϵk, Z0:k−)PT + p (mk | ϵk = F,Z0:k−) p(ϵk|k− = F
)(A.28a)
= PGPDµF(m−k
)PT +
(1− PDPGp
(ϵk|k−
))µF (mk) , (A.28b)
where PT= p (ϵk | Z0:k−).
Substituting equations (A.14) and (A.28) into equation (A.25) yields
p (ϵk | mk, Z0:k−) =
(PGPDµF
(m−k
)+ (1− PGPD)µF (mk)
)PT
PGPDµF(m−k
)PT + (1− PDPGPT )µF (mk)
. (A.29)
Using the fact that
p (ϵk = F | mk, Z0:k−) = 1− p (ϵk | mk, Z0:k−)
and substituting the equations (A.29), (A.24), and (A.16) into equation (A.23) yields the
probability of the validated measurements conditioned on the previous measurements
p (Zk | mk, Z0:k−) =
V−m−
kk
mkPDµF
(m−k
)∑mk
ℓ=1 p (zk,j | ψ, ϵk, Z0:k−)PT
PGPDµF(m−k
)PT + (1− PDPGPT )µF (mk)
+V−mkk (1− PDPGPT )µF (mk)
PGPDµF(m−k
)PT + (1− PDPGPT )µF (mk)
. (A.30)
Substituting in equations (A.16), (A.29), and (A.30) into equation (A.22) and setting
the density of false measurements to the Poisson distribution defined in equation (6.2) yields
the probability of the track likelihood conditioned on the previous measurements given in
equations (6.36) and (6.37).
219

APPENDIX B. PROOFS FOR THE MS-LG-IPDAF
B.1 Proof of Lemma 7.3.2
Proof. Using Bayes rule,
p(xk,α | θk,α, ϵk, ZS
0:k
)=p(ZSk |θk,α, xk, ϵk, ZS
0:k−
)p(xk | ϵk, ZS
0:k−
)
p(ZSk | θk,α, ϵk, ZS
0:k−
) . (B.1)
We solve for the probability p(xk,α | θk,α, ϵk, ZS
0:k
)by using the maximum a poste-
rior (MAP) optimization algorithm to find the value of xk|k− and its corresponding error
covariance Pk|k− that maximizes the right hand side of equation (B.1).
Since the MAP does not depend on p(ZSk | θk,α, ϵk, ZS
0:k−
), it can be absorbed into
the normalizing coefficient simplifying the problem to
maxxk|k− ,Pk|k−
ηp(ZSk |θk,α, xk, ϵk, ZS
0:k−
)p(xk | ϵk, ZS
0:k−
).
In the case θk,α=0, none of the track-associated measurements are target originated;
thus, p(ZSk |θk,α, xk, ϵk, ZS
0:k−
)simplifies to p
(ZSk |θk,α, ZS
0:k−
)and no longer has any depen-
dency on the track’s state. This reduces the MAP optimization problem to
maxxk|k− ,Pk|k−
ηp(xk | ϵk, ZS
0:k−
);
hence, the solution is p(xk,α=0 | θk,α=0, ϵk, Z
S0:k
)= p
(xk | ϵk, ZS
0:k−
).
In the case θk,α =0, only the measurement zk,α has any dependency and influence on
the track’s state since all other measurements are false according to the association event.
220

Using this fact with the relation in equation (7.11), the optimization problem simplifies to
maxxk|k− ,Pk|k−
[∏
sℓ∈Sα
(P sℓG )−1
]
ηp(zk,α|ψ, xk, ϵk, ZS
0:k−
)p(xk | ϵk, ZS
0:k−
).
Multiplying the probabilities p(zk,α | ψ, xk, ϵk, ZS
0:k−
), defined in equation (7.11), and
p(xk | ϵk, ZS
0:k−
), defined in equation (7.10), together, combining their exponents, and drop-
ping the terms P sℓG since they have no impact on the optimization, simplifies the MAP
optimization problem to
maxxk|k− ,Pk|k−
η exp (−L) ,
where
L =1
2
(νk,α −HSα
k xk|k−)⊤ (
RSαk
)−1 (νk,α −HSα
k xk|k−)+
1
2x⊤k|k−P
−1k|k− xk|k−
νk,α = LogGSαI
(z−1k,αzk,α
)
zk,α = hSα(xk|k− , 0
)
RSαk = V Sα
k RSα(V Sαk
)⊤,
xk|k− = LogGxI
(
x−1k|k−xk
)
is the track’s error state, hSα is the augmented observation function
defined in equation (7.5), RSα is the augmented measurement noise covariance defined in
equation (7.6), and HSαk and V Sα
k are the Jacobians of the augmented observation function
defined in equation (7.9) and evaluated at ζhSαk=(xk|k− , 0
).
The MAP is solved by finding the value of xk|k− that minimizes L. Since L is quadratic
in xk|k− , the value of xk|k− that minimizes L is found by taking the first derivative of L with
respect to to xk|k− , setting it to zero and solving for xk|k− . This value becomes the new error
state mean µ−k|k,α. The corresponding covariance is found by taking the second derivative of
L with respect to xk|k− and setting this value to the new covariance P−k|k,α.
Taking the first and second partial derivatives of L with respect to xk|k− yields
∂L
∂xk|k−= −
(
νk,α −HSαk xk|k−
)⊤ (
RSαk
)−1HSαk + x⊤k|k−P
−1k|k−
∂2L
∂x2k|k−
=(
HSαk
)⊤ (
RSαk
)−1HSαk + P−1
k|k−=(
P−k|k,α
)−1.
221

Setting the first derivative to zero, solving for xk|k− and setting this value to µ−k|k,α
gives
µ−k|k,α = Kk,ανk,α,
where Kk,α =(
P−k|k,α
)−1 (HSαk
)⊤ (RSαk
)−1
Since the error state’s mean is no longer zero, the error state no longer has a con-
centrated Gaussian distribution. In order to reset the mean of the error state to zero, we
add µ−k|k,α onto the state estimate xk|k− and adjust the covariance of the error state. In
particular, let the error state after update but before being reset be x−k|k,α = µ−k|k,α + ak|k,α
where ak|k,α ∼ N(
0, P−k|k,α
)
, then under the assumption that ak|k,α is small and using the
property of the right Jacobian defined in equation (3.7) we add µ−k|k,α onto xk|k− as follows:
xk = xk|k−ExpGxI
(
µ−k|k,α + ak|k,α
)
(B.2a)
= xk|k−ExpGxI
(
µ−k|k,α
)
︸ ︷︷ ︸
xk|k,α
ExpGxI
JGxr
(
µ−k|k,α
)
ak|k,α︸ ︷︷ ︸
xk|k,α
, (B.2b)
where
xk|k,α = xk|k−ExpGxI
(
µ−k|k,α
)
, (B.3)
is the updated state estimate, and xk|k,α = JGxr
(
µ−k|k,α
)
ak|k,α is the updated error state after
reset.
The error covariance of the error state xk|k,α is
cov(xk|k,α
)= cov
(
JGxr
(
µ−k|k,α
)
ak|k,α
)
= JGxr
(
µ−k|k,α
)
cov(ak|k,α
)JGxr
(
µ−k|k,α
)⊤
= JGxr
(
µ−k|k,α
)
P−k|k,αJ
Gxr
(
µ−k|k,α
)⊤
= Pk|k,α;
therefore, xk|k,α ∼ N(µk|k,j = 0, Pk|k,α
)and xk ∼ N
(xk|k, Pk|k,α
).
222

B.2 Proof of Lemma 7.3.3
Proof. Using the smoothing property of conditional expectations, the mean of
p(x−k | ϵk, ZS
0:k
)is
µ−k|k = E
[
E[
x−k|k,α|θk,α, ϵk]]
(B.4a)
=∑
α∈A
E[
x−k|k,α|θk,α, ϵk]
βk,α (B.4b)
=∑
α∈A
µ−k|k,αβk,α (B.4c)
By the definition of the covariance, the covariance of x−k|k is
P−k|k =
∫ (
x−k|k − µ−k|k
)(
x−k|k − µ−k|k
)⊤
p(x−k | ϵk, ZS
0:k
)dx−k|k
Using equation (7.23), the covariance can be written as
P−k|k =
∑
α∈A
βk,α
[∫ (
x−k|k − µ−k|k
)(
x−k|k − µ−k|k
)⊤p(x−k | θk,α, ϵk, ZS
0:k
)dx−k|k
]
=∑
α∈A
βk,α
[∫ ((
x−k|k − µ−k|k,α
)(
x−k|k − µ−k|k,α
)⊤
(
µ−k|k,α − µ−
k|k
)(
µ−k|k,α − µ−
k|k
)⊤)
p(x−k | θk,α, ϵk, ZS
0:k
)dx−k|k
]
=∑
α∈A
βk,αP−k|k,α +
∑
α∈A
βk,α
(
µ−k|k,α − µ−
k|k
)(
µ−k|k,α − µ−
k|k
)⊤.
Noting that∑
α∈A βk,α = 1, using the definition of µ−k|k and µ−
k|k,α from equations
(B.4) and (7.16) and with algebraic manipulations we get equation 7.25.
B.3 Proof of Lemma 7.3.4
Proof. The probability of the current track likelihood conditioned on all the validated mea-
surements is
p(ϵk | ZS
0:k
)= p
(ϵk | mS
k , ZS0:k− , Z
Sk
), (B.6)
223

where we have separated ZSk and ZS
0:k− from ZS0:k and explicitly written the inference on the
number of validated measurements from each sensor denoted mSk = msℓ
k sℓ∈Sα . Using Bayes’rule
p(ϵk | ZS
0:k
)=p(ZSk | ϵk,mS
k , ZS0:k−
)p(ϵk | mS
k , ZS0:k−
)
p(ZSk | mS
k , ZS0:k−
) , (B.7)
where
p(ZSk | mS
k , ZS0:k−
)= p
(ZSk | ϵk,mS
k , ZS0:k−
)p(ϵk | mS
k , ZS0:k−
)
+p(ZSk | ϵk = F,mS
k , ZS0:k−
)p(ϵk = F | mS
k , ZS0:k−
), (B.8)
and ϵk = F denotes that the track does not represent the target.
The probability p(ZSk | ϵk,mS
k , ZS0:k−
)is equal to
p(ZSk | ϵk,mS
k , ZS0:k−
)=∏
sℓ∈Sk
p(Zsℓk | ϵk,msℓ
k , ZS0:k−
), (B.9)
since the number of measurements from one sensor has no impact on the measurements from
a different sensor due to the sensors being independent. Let msℓ−
k
= msℓ
k −1. The probability
p(Zsℓk | ϵk,msℓ
k , ZS0:k−
)is derived in Lemma 6.4.3 and is
p(Zsℓk | ϵk,msℓ
k , ZS0:k−
)=
(Vsℓk )
−msℓ
−
k
msℓk
P sℓD µ
sℓF
(
msℓ−
k
)∑m
sℓk
j=1 p(zsℓk,j | ψ, ϵk, ZS
0:k−
)
P sℓD P
sℓG µ
sℓF
(
msℓ−
k
)
+ (1− P sℓD P
sℓG )µsℓ
F (msℓk )
+(Vsℓ
k )−msℓk (1− P sℓ
D PsℓG )µsℓ
F (msℓk )
P sℓD P
sℓG µ
sℓF
(
msℓ−
k
)
+ (1− P sℓD P
sℓG )µsℓ
F (msℓk ), (B.10)
where Vsℓk is the volume of the validation region for sensor sℓ, and µ
sℓF denotes the Poisson
density function of the number of false measurements for sensor sℓ defined in equation (7.4).
The probability p(ZSk | ϵk = F,mS
k , ZS0:k−
)is the probability that all of the validated
measurements are false since the track the measurements were associated with does not
represent the target as indicated by the condition ϵk = F . False measurements are assumed
independent and uniformly distributed, so the probability of a false measurement from sensor
224

sℓ inside the validation region of volume Vsℓk is (Vsℓ
k )−1. Therefore,
p(ZSk | ϵk = F,mS
k , ZS0:k−
)=∏
sℓ∈Sk
(Vsℓk )−m
sℓk (B.11)
Next we proceed to calculate the probabilities p(ϵk | mS
k , ZS0:k−
)and
p(ϵk = F | mS
k , ZS0:k−
). Using Bayes’ rule
p(ϵk | mS
k , ZS0:k−
)=p(mSk | ϵk, ZS
0:k−
)p(ϵk | ZS
0:k−
)
p(mSk | ZS
0:k−
) (B.12a)
p(ϵk = F | mS
k , ZS0:k−
)=p(mSk | ϵk = F,ZS
0:k−
)p(ϵk = F | ZS
0:k−
)
p(mSk , Z
S0:k−
) . (B.12b)
Since the sensors are independent, the number of measurements from each sensor is inde-
pendent from the other sensors. Therefore, the above equations simplify to
p(ϵk | mS
k , ZS0:k−
)=
p(ϵk | ZS
0:k−
)∏
sℓ∈Skp(m
sℓk | ϵk, ZS
0:k−
)
∏
sℓ∈Skp(m
sℓk | ZS
0:k−
) (B.13a)
p(ϵk = F | mS
k , ZS0:k−
)=
(1− p
(ϵk | ZS
0:k−
))∏
sℓ∈Skp(m
sℓk | ϵk = F,ZS
0:k−
)
∏
sℓ∈Skp(m
sℓk | ZS
0:k−
) , (B.13b)
where we used the fact p(ϵk = F | ZS
0:k−
)=(1− p
(ϵk | ZS
0:k−
)).
The probability p(msℓk | ϵk, ZS
0:k−
)is derived in Lemma 6.4.3 and is
p(msℓk | ϵk, ZS
0:k−
)= P sℓ
G PsℓD µ
sℓF
(
msℓ−
k
)
+ (1− P sℓG P
sℓD )µsℓ
F (msℓk ) . (B.14)
The probability p(msℓk | ϵk = F,ZS
0:k−
)is the probability of the number of measure-
ments provided that the track does not represent the target. Thus, it is the probability that
all of the measurements are false.
p(msℓk | ϵk = F,ZS
0:k−
)= µsℓ
F (msℓk ) . (B.15)
We will not solve for p(msℓk | ZS
0:k−
)since it is not needed.
225

Substituting in equations (B.8), (B.10), (B.11) and (B.13) into (B.7) yields
p(ϵk | ZS
0:k
)=
p(ϵk | ZS
0:k−
)∏
sℓ∈skp(Z
sℓk | ϵk,msℓ
k , ZS0:k−
)p(m
sℓk | ϵk, ZS
0:k−
)
c, (B.16)
where
c =p(ϵk | ZS
0:k−
) ∏
sℓ∈sk
p(Zsℓk | ϵk,msℓ
k , ZS0:k−
)p(msℓk | ϵk, ZS
0:k−
)
+(1− p
(ϵk | ZS
0:k−
)) ∏
sℓ∈sk
(p(Zsℓk | ϵk = F,msℓ
k , ZS0:k−
)p(msℓk | ϵk = F,ZS
0:k−
))(B.17)
Substituting in equations (7.4), (B.10), (B.11), (B.14), and (B.15) yields equation (7.28).
226

APPENDIX C. COMMON LIE GROUPS
This appendix presents the Lie groups used in this dissertation.
C.1 Rn
The Euclidean space of n-dimension, Rn, represents points in n-dimensional space and
also represents translations in n-dimensional space. Its Lie algebra represents all translational
velocities in n-dimensional space. The Lie group Rn is the set
Rn ≜
[a1, a2, . . . , an]⊤ | ai ∈ R
equipped with matrix addition. Let a, b, c ∈ Rn, the group operation and axioms are defined
as follows:
a+ b = [a1 + b1, a2 + b2, . . . , an + bn]⊤ group operation
a+ (b+ c) = (a+ b) + c associativity
a−1 = [−a1,−a2, . . . ,−an]⊤ inverse
I = [0, 0, . . . , 0]⊤ identity element
The corresponding Lie algebra is Rn, and the corresponding Cartesian algebraic space
is RRn ≜ Rn. The wedge, ·∧ : RRn → Rn, and vee, ·∨ : Rn → RRn maps are the identity
functions.
227

C.1.1 Adjoint
The matrix adjoint of g ∈ Rn and v ∈ RRn are
AdRn
g = In×n
adRn
v = 0n×n,
where 0n×n is the n× n zero matrix.
C.1.2 Exponential Map and Jacobians
Let g ∈ Rn and v ∈ RRn . The exponential and logarithm maps are defined as
ExpRn
I (v) = v (C.1)
LogRn
I (g) = g. (C.2)
The left and right Jacobians and their inverses are defined as
JRn
r (v) = In×n
JRn
l (v) = In×n
JRn−1
r (v) = In×n
JRn−1
l (v) = In×n,
where In×n is the n× n identity matrix.
C.2 SO(2)
The special orthogonal group of two dimensions, SO (2), represents all rotations and
orientations in two dimensional space. Its Lie algebra represents all angular velocities in two
dimensional space. The matrix Lie group SO (2) is the set
SO (2) ≜R ∈ R2×2 | RR⊤ = I2×2 and det (R) = 1
228

equipped with matrix multiplication. The inverse operation is the matrix inverse and the
identity element is I2×2.
The corresponding Lie algebra is the set
so (2) ≜[ω]1× | ω ∈ R
,
where
[ω]1× =
0 −ωω 0
(C.3)
is the skew symmetric operator. The corresponding Cartesian algebraic space is the set
RSO(2) ≜ ω ∈ R .
The wedge, ·∧ : RSO(2) → so (2), and vee, ·∨ : so (2) → RSO(2) maps are defined as
ω∧ = [ω]1×([ω]1×
)∨= ω.
C.2.1 Adjoint
The matrix adjoint of R ∈ SO (2) and ω ∈ RSO(2) is
AdSO(2)R = I1×1 (C.4)
adSO(2)ω = 01×1, (C.5)
where In×n is the n× n identity matrix, and 0n×n is the n× n zero matrix.
229

C.2.2 Exponential Map and Jacobians
Let R =
R11 R12
R21 R22
∈ SO (2) and ω ∈ RSO(2). The exponential and logarithm maps
are defined as
ExpSO(2)I (ω) =
cos (ω) − sin (ω)
sin (ω) cos (ω)
(C.6)
LogSO(2)I (R) = arctan2 (R21, R11) . (C.7)
The left and right Jacobians and their inverses are defined as
JSO(2)r (ω) = I1×1 (C.8)
JSO(2)l (ω) = I1×1 (C.9)
JSO2−1
r (ω) = I1×1 (C.10)
JSO2−1
l (ω) = I1×1. (C.11)
C.3 SO(3)
The special orthogonal group of three dimensions, SO (3), is a matrix Lie group used
to describe rotations and orientation in three dimensional space, and its Lie algebra is used
to describe angular velocities in three dimensional space. The Lie group SO (3) is the set
SO (3) ≜R ∈ R3×3 | RR⊤ = I3×3 and det (R) = 1
,
equipped with matrix multiplication. The inverse operation is the matrix inverse and the
identity element is I3×3.
The Lie algebra of SO (3) is
so (3) ≜[ω]3× ∈ R3×3 | ω ∈ R3
,
230

where ω = [ωx, ωy, ωz]⊤ and
[ω]3× =
0 −ωz ωy
ωz 0 −ωx−ωy ωx 0
(C.12)
is the three dimensional skew symmetric operator. The corresponding Cartesian algebraic
space is
RSO(3) ≜ω ∈ R3
.
The wedge, ·∧ : RSO(3) → so (3), and vee, ·∨ : so (3) → RSO(3) maps are defined as
ω∧ = [ω]3×([ω]3×
)∨= ω
C.3.1 Adjoint
The matrix adjoint of R ∈ SO (3) and ω ∈ RSO(3) is
AdSO(3)R = R (C.13)
adSO(3)ω = [ω]3× . (C.14)
C.3.2 Exponential Map and Jacobians
Let R ∈ SO (3) and ω ∈ RSO(3). The element ω can be written as ω = θu where
θ = ∥ω∥ and u = ω∥ω∥
. The exponential and logarithm maps are defined as
ExpSO(3)I (ω) =
I + sin (θ) [u]3× + (1− cos (θ))([u]3×
)2if θ = 0
I3×3 else
(C.15)
LogSO(3)I (R) =
03×1 if R = I3×3
φ (R)(R−R⊤)
∨
2 sin(φ(R))else
(C.16)
231

where
φ (R) = arccos
(Tr (R)− 1
2
)
,
and Tr (R) is the trace of R.
The left and right Jacobians and their inverses are defined as
JSO(3)r (ω) = I +
cos (θ)− 1
θ[u]3× +
θ − sin (θ)
θ
([u]3×
)2(C.17)
JSO(3)l (ω) = I +
1− cos (θ)
θ[u]3× +
θ − sin (θ)
θ
([u]3×
)2(C.18)
JSO(3)−1
r (ω) = I +1
2[ω]3× − θ cot
(θ2
)− 2
2θ2([ω]3×
)2(C.19)
JSO(3)−1
l (ω) = I − 1
2[ω]3× − θ cot
(θ2
)− 2
2θ2([ω]3×
)2. (C.20)
C.4 SE(2)
The special Euclidean group of two dimensions, SE (2), represents all rotations and
translations in two dimensional space. It can also represents all orientations and positions
in two dimensional space. Its Lie algebra represents all angular and translational velocities
in two dimensional space. The Lie group SE (2) is the set
SE (2) =
R p
01×2 1
∈ R3×3
∣∣∣∣∣∣
R ∈ SO (2) and p ∈ R2
equipped with matrix multiplication. The inverse operation is the matrix inverse and the
identity element is I3×3.
The Lie algebra is
se (2) =
[ω]1× ρ
0 0
∈ R3×3
∣∣∣∣∣∣
ω ∈ RSO(2) and ρ ∈ R2
,
232

where [·]1× is the skew symmetric operator defined in equation (C.3). The corresponding
Cartesian algebraic space is
RSE(2) ≜
ρ
ω
∈ R3
∣∣∣∣∣∣
ω ∈ R and ρ ∈ R2
.
The wedge, ·∧ : RSE(2) → se (2), and vee, ·∨ : se (2) → RSE(2) maps are defined as
[ω]1× ρ
0 0
∨
=
ρ
ω
ρ
ω
∧
=
[ω]1× ρ
0 0
.
C.4.1 Adjoint
The matrix adjoint of g ∈ SE (2) and v ∈ RSE(2) is
AdSE(2)g =
R − [1]1× p
01×2 1
adSE(2)v =
[ω]1× − [1]1× ρ
01×2 0
.
C.4.2 Exponential Map and Jacobians
Let g ∈ SE (2) and v ∈ RSE(2). The exponential and logarithm maps are defined as
ExpSE(2)I (v) =
Exp
SO(2)I (ω) V (ω) ρ
01×2 1
(C.21)
LogSE(2)I (g) =
V(
LogSO(2)I (R)
)−1
p
LogSO(2)I (R)
, (C.22)
233

where ExpSO(2)I and Log
SO(2)I are defined in equations (C.6) and (C.7) and
V (ω) =sin (ω)
ωI2×2 +
1− cos (ω)
ω[1]1× . (C.23)
The left and right Jacobians and their inverses are defined as
JSE(2)r (v) =
Wr (ω) Dr (ω) ρ
0 1
, (C.24)
JSE(2)l (v) =
Wl (ω) Dl (ω) ρ
0 1
(C.25)
JSE(2)−1
r (v) =
W−1r (ω) −W−1
r (ω)Dr (ω) ρ
0 1
(C.26)
JSE(2)−1
l (v) =
W−1l (ω) −W−1
l (ω)Dl (ω) ρ
0 1
. (C.27)
where
Wr (ω) =cos (ω)− 1
ω[1]× +
sin (ω)
ωI
Dr (ω) =1− cos (ω)
ω2[1]× +
ω − sin (ω)
ω2I
Wl (ω) =1− cos (ω)
ω[1]× +
sin (ω)
ωI
Dl (ω) =cos (ω)− 1
ω2[1]× +
ω − sin (ω)
ω2I,
C.5 SE(3)
The special Euclidean group of three dimensions, SE (3), represents all rotations and
translations in three dimensional space. It can also represents all orientations and positions
in three dimensional space. Its Lie algebra represents all angular and translational velocities
234

in three dimensional space. The Lie group SE (3) is the set
SE (3) ≜
R p
01×3 1
∈ R4×4
∣∣∣∣∣∣
R ∈ SO (3) and p ∈ R3
,
equipped with matrix multiplication. The inverse operation is the matrix inverse and the
identity element is I4×4.
The Lie algebra of SE (3) is
se (3) ≜
[ω]3× ρ
0 0
∈ R4×4
∣∣∣∣∣∣
ω ∈ R3 and ρ ∈ R3
,
where [·]3× is the skew symmetric operator defined in equation (C.12). The corresponding
Cartesian algebraic space is
RSE(3) ≜
ρ
ω
∈ R6
∣∣∣∣∣∣
ω ∈ R3 and ρ ∈ R3
.
The wedge, ·∧ : RSE(3) → se (3), and vee, ·∨ : se (3) → RSE(3) maps are defined as
[ω]3× ρ
0 0
∨
=
ρ
ω
ρ
ω
∧
=
[ω]3× ρ
0 0
.
C.5.1 Adjoint
The matrix adjoint of g ∈ SE (3) and v ∈ RSE(3) is
AdSE(3)g =
R [ρ]3×R
03×3 R
235

adSE(3)v =
[ω]3× [ρ]3×
03×3 [ω]3×
.
C.5.2 Exponential Map and Jacobians
Let g ∈ SE (3) and v ∈ RSE(3). The exponential and logarithm maps are defined as
ExpSE(3)I (v) =
Exp
SO(3)I (ω) J
SO(3)l (ω) ρ
01×3 1
(C.28)
LogSE(3)I (g) =
JSO(3)−1
l
(
LogSO(3)I (R)
)
p
LogSO(3)I (R)
, (C.29)
where ExpSO(3)I and Log
SO(3)I are defined in equations (C.15) and (C.16) and J
SO(3)l and
JSO(3)−1
l are defined in equations (C.18) and (C.20).
The left and right Jacobians and their inverses are defined as
JSE(3)r (v) =
JSO(3)r (ω) Br (v)
0 JSO(3)r (ω)
(C.30)
JSE(3)l (v) =
JSO(3)l (ω) Bl (v)
0 JSO(3)l (ω)
(C.31)
JSE(3)−1
r (v) =
JSO(3)−1
r (ω) −JSO(3)−1
r (ω)Br (v) JSO(3)−1
r (ω)
0 JSO(3)−1
r (ω)
(C.32)
JSE(3)−1
l (v) =
JSO(3)−1
l (ω) −JSO(3)−1
l (ω)Bl (v) JSO(3)−1
l (ω)
0 JSO(3)−1
l (ω)
. (C.33)
where
θ = ∥ω∥
aθ =cos (θ)− 1
θ2
bθ =θ − sin (θ)
θ3
236

cθ = − 1
θ3sin (θ) + 2
(1− cos (θ)
θ4
)
dθ = − 2
θ4+
3
θ5sin (θ)− 1
θ4cos (θ)
qr (ω) =(ω⊤ρ
) (
dθ([ω]3×
)2+ cθ [ω]3×
)
ql (ω) =(ω⊤ρ
) (
dθ([ω]3×
)2 − cθ [ω]3×
)
Br (v) =(aθ [ρ]3× + bθ
([ω]3× [ρ]3× + [ρ]3× [ω]3×
)+ qr (ω)
)
Bl (v) =(−aθ [ρ]3× + bθ
([ω]3× [ρ]3× + [ρ]3× [ω]3×
)+ ql (ω)
),
JSO(3)r , J
SO(3)l , JSO(3)−1
r and JSO(3)−1
l are defined in equations (C.17), (C.18), (C.19) and (C.20),
and [·]3× is the skew symmetric matrix operator defined in equation (C.12).
237

APPENDIX D. GLOSSARY
cluster A grouping of neighboring measurements in time and space.
confirmed track A track that has a high probability of representing a target. Typically, a
confirmed track has a track likelihood above some user defined threshold.
consensus set The set of measurements associated to the track.
false measurement A measurement that doesn’t correspond to a target of interest. A false
measurement is often referred to as clutter.
measurement space The disjoint union of all possible observations given the suite of sen-
sors.
rejected track A track that has a sufficiently low probability of representing a target that
is removed and deleted. Typically, a rejected track has a track likelihood below some
user defined threshold.
sensor frame A frame that coincides with a sensor surveillance region in which the sensor’s
measurements are described.
sensor mode one The sensor configuration where the measurements are transformed into
the tracking frame before being given to G-MTT.
sensor mode two The sensor configuration where each sensor provides a transformation
in addition to the measurements that transforms a track’s state estimate from the
tracking frame to the sensor frame.
238

sensor model A mathematical description of the sensor that maps the target’s state and
measurement noise to a measurement.
sensor scan A sensor scan occurs when a sensor observes it’s local surveillance region and
encodes its observation in meaningful data from which measurements are extracted.
sensor surveillance region The subset of measurement space that is observable by a single
sensor.
surveillance region The union of every sensor surveillance region.
system model The combination of the target and sensor models.
target model A mathematical description of the target’s state and dynamics.
time window An interval of time extending into the past from the current time.
track Generically, a track can be thought of as a representation of a target. Specifically in
our work, we define a track to be a tuple consisting of a state estimate, error covariance,
consensus set, track likelihood, and a unique label.
track initialization The process of using measurements to construct new tracks.
track likelihood A statistical measure that indicates the probability that a track represents
a target.
tracking frame The frame in which the tracks are expressed.
true measurement A measurement that corresponds to a target of interest.
validation region A volume in measurement space centered on a track’s estimated mea-
surement, and serves as a gate during data association.
239