A Force Torqe Relationship and Its Experimental Verification for Flexible Link Manipulator
5
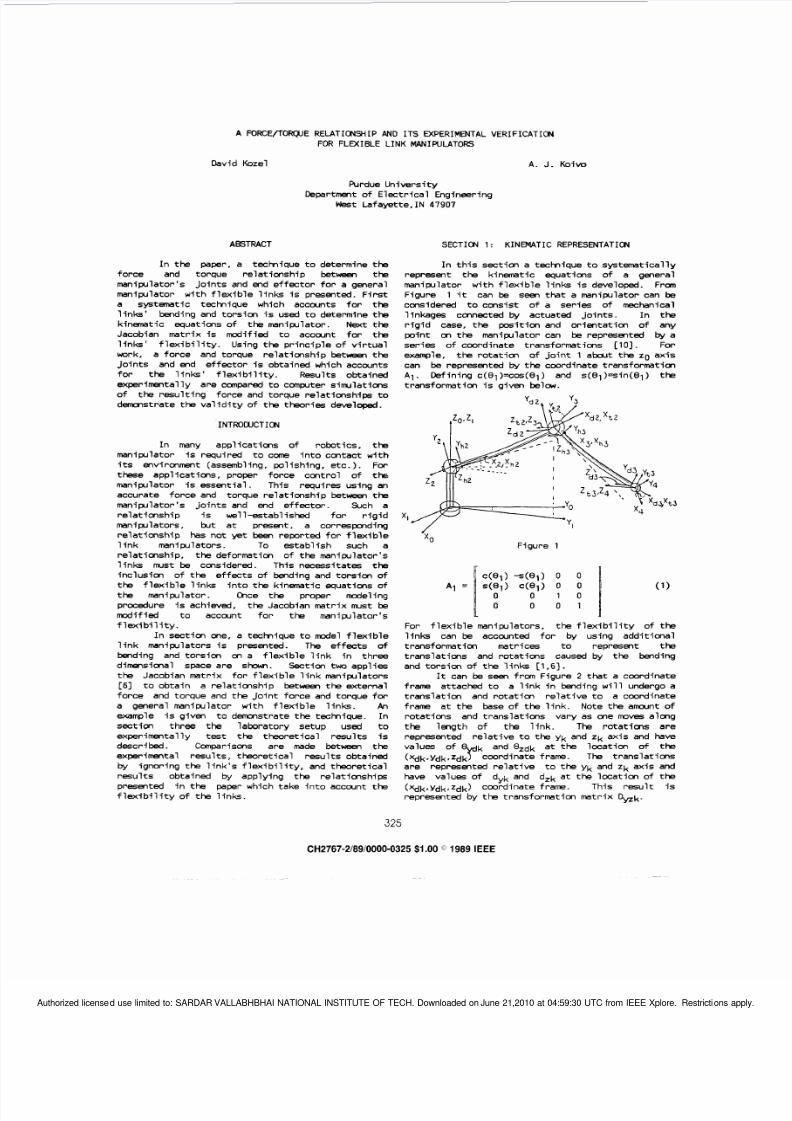
A FORCE/TORQJE RELATIONSHIP AND F O R FLEXIBLE LINK MANI PUL ATO RS David Kozel A. J. Koivo Purdue University Department of Electrical Engineering West Lafayette.IN 47907 ABSTRACT In the paper. a tectnique to determine the force a nd torque relationship bet- the manipulator's joints and end effector for a general manipulator with flexible links is presented. First a systematic technique which accounts for the links' bending and torsion i s used to determine the kinematic equations of the manipulator. Next the Jacobian matrix is malified to accwnt for the links' flexibility. Using the principle of virtual work, a forc e and torque relationship bet- the joints and end effector is obtained which accounts for the links' flexibility. Results obtained exp erimentally are compared t o computer simulations of the resulting force and torque relationships to demonstrate the validity of the theories developed. INTROWCTION In many applications of robotics, the manipllator is required to cane into contact with its environment (assembling, polishing, etc.). For these applications. proper force control of t manipulator i s essential. This requires using an accurate force and torque relationship between the manipulator's jo in ts and end effector. Such a relationship is well-established for rigid manipulators. but a t present, a corresponding relationship has not yet been reported for flexible link manipulators. To establish such a relationship, the deformation of the manipulator's links must be considered. This necessitates the inclusion of the effects of tending and torsion o f the flexible links into the kinematic equations of the mnipulator. Chce the proper modeling procedure is achieved, the Jacobian matrix rmst be modified to accwnt for the mniprlator's f exi bil i y . In section one, a tectnique to d el lexible link mnipulators is presented. The effects o f bending and to rsion on a flexible link in three dimensional space are shom. Section two applies the Jacobian mtrix for flexible link manipulators [6] to obtain a relationship between the external force and torque and the join t force and torque for a general manipulator with flexible links. An example is given to dmstrate the tectnique. In section three the laboratory setup u se d to experimentally test the theoretical results is described. Compari sons ar e ma de between th e experimental results, theoretical results obtained by ignoring the link's flexibility, and theoretical results obtained by applying the relationships presented in the paper which take into accwnt the flexibility of the links. SECTION 1: KINEMATIC REPRESENTATION In this section a technique to systematically represent the kinematic equations of a general manipulator with flex ible links i s developed. From Figure 1 i t can be s m hat a manipulator can be considered to consist of a series of mechanical linkages connected by actuated joints. In the rig id case, the p i t i o n and orientation of any point on the manipllator can be represented by a series of Coordinate transformations [lo] For e xa mp le . the rotation of join t 1 about the zo axis can be represented by the coordinate transformation AI- Defining c(e1)=cOs( t31) and s(81)=sin(81) the transformation is given below. Figure 1 For flexible manipulators. the flexibility of the link s can be accounted for by using additional transformation matrices to represent the translations and rotations caused by the bending and torsion of the links 11.63. It can be seen from Figure 2 that a coordinate frame attached to a link in bending will undergo a translation and rotation relative to a coordinate frame at the base of the link. Note the a m n t of rotations and translations vary as one moves along the length of the link. The rotatims are represented relativ e t o the yk and zk axis and have (Xdk.Ydk.Zdk coordinate frame. The translatiom are represented relative to the yk and zk axis and have values of dyk and dk at the location of the (Xdk.ydk.Z&) coo rdinate frame. This result i s represented by the transformation matrix DyLk- Values O f "y"k and ezdk & th e lCCatiC3-I f the 325 CH2767-2/89/0000-0325 1 OO 1989 IEEE Authorized license d use limited to: SARDAR VALLABHBHAI NATIONAL INSTITUTE OF TECH. Downloaded on June 21,2010 at 04:59:30 UTC from IEEE Xplore. Restricti ons apply.
A Force Torqe Relationship and Its Experimental Verification for Flexible Link Manipulator