-
A First Course in Applied Mathematics
-
A First Course in Applied Mathematics
Jorge Rebaza Department of Mathematics
Missouri State University Springfield, MO
WILEY A JOHN WILEY & SONS, INC., PUBLICATION
-
Copyright © 2012 by John Wiley & Sons, Inc. All rights
reserved.
Published by John Wiley & Sons, Inc., Hoboken, New Jersey.
Published simultaneously in Canada.
No part of this publication may be reproduced, stored in a
retrieval system or transmitted in any form or by any means,
electronic, mechanical, photocopying, recording, scanning or
otherwise, except as permitted under Section 107 or 108 of the 1976
United States Copyright Act, without either the prior written
permission of the Publisher, or authorization through payment of
the appropriate per-copy fee to the Copyright Clearance Center,
Inc., 222 Rosewood Drive, Danvers, MA 01923, (978) 750-8400, fax
(978) 750-4470, or on the web at www.copyright.com. Requests to the
Publisher for permission should be addressed to the Permissions
Department, John Wiley & Sons, Inc., 111 River Street, Hoboken,
NJ 07030, (201) 748-6011, fax (201) 748-6008, or online at
http://www.wiley.com/go/permission.
Limit of Liability/Disclaimer of Warranty: While the publisher
and author have used their best efforts in preparing this book,
they make no representation or warranties with respect to the
accuracy or completeness of the contents of this book and
specifically disclaim any implied warranties of merchantability or
fitness for a particular purpose. No warranty may be created or
extended by sales representatives or written sales materials. The
advice and strategies contained herein may not be suitable for your
situation. You should consult with a professional where
appropriate. Neither the publisher nor author shall be liable for
any loss of profit or any other commercial damages, including but
not limited to special, incidental, consequential, or other
damages.
For general information on our other products and services
please contact our Customer Care Department within the United
States at (800) 762-2974, outside the United States at (317)
572-3993 or fax (317) 572-4002.
Wiley also publishes its books in a variety of electronic
formats. Some content that appears in print, however, may not be
available in electronic formats. For more information about Wiley
products, visit our web site at www.wiley.com.
Library of Congress Cataloging-in-Publication Data:
Rebaza, Jorge. A first course in applied mathematics / Jorge
Rebaza.
p. cm. Includes bibliographical references and index.
ISBN 978-1-118-22962-0 1. Mathematical models. 2. Computer
simulation. I. Title. TA342.R43 2012 510—dc23 2011043340
Printed in the United States of America.
10 9 8 7 6 5 4 3 2 1
http://www.copyright.comhttp://www.wiley.com/go/permissionhttp://www.wiley.com
-
To my parents:
Leoncio Rebaza Minano and
Santos Vasquez Paredes
-
CONTENTS
Preface xiii
1 Basics of Linear Algebra 1 1.1 Notation and Terminology 1 1.2
Vector and Matrix Norms 4 1.3 Dot Product and Orthogonality 8 1.4
Special Matrices 9
1.4.1 Diagonal and triangular matrices 9 1.4.2 Hessenberg
matrices 10 1.4.3 Nonsingular and inverse matrices 11 1.4.4
Symmetric and positive definite matrices 12 1.4.5 Matrix
exponential 14 1.4.6 Permutation matrices 15 1.4.7 Orthogonal
matrices 17
1.5 Vector Spaces 21 1.6 Linear Independence and Basis 24 1.7
Orthogonalization and Direct Sums 31 1.8 Column Space, Row Space,
and Null Space 34
1.8.1 Linear transformations 40 1.9 Orthogonal Projections 43
1.10 Eigenvalues and Eigenvectors 47
vii
-
Viii CONTENTS
1.11 Similarity 56 1.12 Bezier Curves and Postscript Fonts
59
1.12.1 Properties of Bezier curves 61 1.12.2 Composite Bezier
curves 66
1.13 Final Remarks and Further Reading 68 Exercises 69
Ranking Web Pages 79 2.1 The Power Method 80 2.2 Stochastic,
Irreducible, and Primitive Matrices 84 2.3 Google's PageRank
Algorithm 92
2.3.1 The personalization vector 99 2.3.2 Speed of convergence
and sparsity 100 2.3.3 Power method and reordering 105
2.4 Alternatives to the Power Method 106 2.4.1 Linear system
formulation 107 2.4.2 Iterative aggregation/disaggregation (IAD)
111 2.4.3 IAD and linear systems 117
2.5 Final Remarks and Further Reading 120 Exercises 121
Matrix Factorizations 131 3.1 LU Factorization 132
3.1.1 The complex case 137 3.1.2 Solving several systems 137
3.1.3 The PA = LU factorization 139
3.2 QR Factorization 142 3.2.1 QR and Gram-Schmidt 143 3.2.2 The
complex case 147 3.2.3 QR and similarity 148 3.2.4 The QR algorithm
149 3.2.5 QR and LU 151
3.3 Singular Value Decomposition (SVD) 155 3.3.1 The complex
case 160 3.3.2 Low-rank approximations 161 3.3.3 SVD and spectral
norm 164
3.4 Schur Factorization 166 3.4.1 The complex case 171 3.4.2
Schur factorization and invariant subspaces 172 3.4.3 Exchanging
eigenblocks 177 3.4.4 Block diagonalization 180
-
CONTENTS JX
3.5 Information Retrieval 186 3.5.1 Query matching 187 3.5.2
Low-rank query matching 190 3.5.3 Term-term comparison 192
3.6 Partition of Simple Substitution Cryptograms 194 3.6.1
Rank-1 approximation 197 3.6.2 Rank-2 approximation 199
3.7 Final Remarks and Further Reading 203 Exercises 205
Least Squares 215 4.1 Projections and Normal Equations 215 4.2
Least Squares and QR Factorization 224 4.3 Lagrange Multipliers 228
4.4 Final Remarks and Further Reading 231
Exercises 231
Image Compression 235 5.1 Compressing with Discrete Cosine
Transform 236
5.1.1 1 -D discrete cosine transform 236 5.1.2 2-D discrete
cosine transform 242 5.1.3 Image compression and the human visual
system 245 5.1.4 Basis functions and images 247 5.1.5 Low-pass
filtering 250 5.1.6 Quantization 254 5.1.7 Compression of color
images 257
5.2 Huffman Coding 260 5.2.1 Huffman coding and JPEG 262
5.3 Compression with SVD 267 5.3.1 Compressing grayscale images
268 5.3.2 Compressing color images 268
5.4 Final Remarks and Further Reading 269 Exercises 271
Ordinary Differential Equations 277 6.1 One-Dimensional
Differential Equations 278
6.1.1 Existence and uniqueness 278 6.1.2 A simple population
model 284 6.1.3 Emigration 285 6.1.4 Time-varying emigration 285
6.1.5 Competition 286
-
X CONTENTS
6.1.6 Spring systems 287 6.1.7 Undamped equations 293 6.1.8
Damped equations 299 6.1.9 RLC circuits 303
6.2 Linear Systems of Differential Equations 307 6.3 Solutions
via Eigenvalues and Eigenvectors 307
6.3.1 Chains of generalized eigenvectors 311 6.4 Fundamental
Matrix Solution 312
6.4.1 Nonhomogeneous systems 314 6.5 Final Remarks and Further
Reading 316
Exercises 316
7 Dynamical Systems 325
7.1 Linear Dynamical Systems 326 327 335 337
7.2 Nonlinear Dynamical Systems 340 342
348
352
360
365
7.3 Predator-prey Models with Harvesting 374 376
376
379
380
382
7.4 Final Remarks and Further Reading 385 385
8 Mathematical Models 395
8.1 Optimization of a Waste Management System 396 8.1.1
Background 396 8.1.2 Description of the system 397 8.1.3
Development of the mathematical model 398 8.1.4 Building the
objective function 399 8.1.5 Building the constraints 400 8.1.6
Numerical experiments 400
8.2 Grouping Problem in Networks 404
7.1.1 7.1.2 7.1.3
Dynamics in two dimensions Trace-determinant analysis Stable,
unstable, and center subspaces
Nonlinear Dynamical Systems 7.2.1 7.2.2 7.2.3 7.2.4 7.2.5
Linearization around an equilibrium point Linearization around a
periodic orbit Connecting orbits Chaos Bifurcations
Predator-prey Models with Harvesting 7.3.1 7.3.2 7.3.3 7.3.4
7.3.5
Boundedness of solutions Equilibrium point analysis Bifurcations
Connecting orbits Other models
Final Remarks and Further Reading
-
CONTENTS Xi
405 406 407 409
8.3 American Cutaneous Leishmaniasis 410 410
413
414
416
418
8.4 Variable Population Interactions 420 420 421 425
References 431
Index 435
8.2.1 8.2.2 8.2.3 8.2.4
Background The TV-median approach The probabilistic approach
Numerical experiments
American Cutaneous Leishmaniasis 8.3.1 8.3.2 8.3.3 8.3.4 8.3.5
Variabl 8.4.1 8.4.2 8.4.3
Background Development of the mathematical model Equilibria and
periodic orbits Stability properties Numerical computations
le Population Interactions Model formulation Local stability of
equilibria Bifurcations
-
PREFACE
Going back in history, mathematics originated as a practical
science, as a tool to facilitate administration of harvest,
computation of the calendar, collection of taxes, and so on. But
even i early Greek society, the study of mathematics had one main
goal: the understanding of humankind's purpose in the universe
according to a rational scheme. Thus developed a mathematics
investigated more in the spirit of understanding rather than only
of utility, and this has been a central and successful focus of
mathematics since then.
The constant development of new and more sophisticated
technologies, in particular, the very fast progress of software and
hardware technology, has contributed to a clear change in how
mathematics should be studied and taught nowadays, and in how old
and new mathematical theories can now be effectively and
efficiently applied to the solution of current real-world
problems.
Not everybody agrees on what Applied Mathematics means and which
subjects or topics it includes. Differential equations may be
applied mathematics for some (as it applies notions e.g. from
analysis and linear algebra), while for others it is just another
subject of pure mathematics, of course with several potential
applications. However, we can make a first attempt to list
topics:
(Pure) Mathematics: Topology, Abstract Algebra, Analysis, Linear
Algebra.
Applied Mathematics: Dynamical Systems, Matrix Computations,
Optimization, Financial Mathematics, Numerical Methods.
xiii
-
XJV PREFACE
Figure 0.1 Applied Mathematics.
On the other hand, several people would argue that all of the
subjects above are just mathematics, and not exactly applied
mathematics. They would ask for the applications of dynamical
systems or of numerical analysis; in other words, they would ask
for applications of the applications, or "real-world
applications".
Here is when the terms Industrial Mathematics and Mathematical
Modeling would probably help. Given a real-world ("industrial")
problem, e.g., describe the motion of a particle in certain fluid
or matter, or rank all web pages in terms of importance, we first
try to describe this problem in mathematical terms (a process
called mathematical modeling), arriving at a mathematical model
(e.g., a set of differential equations or an eigenvalue/eigenvector
problem). This mathematical problem is then solved using
math-ematical tools (e.g. numerical analysis and linear algebra).
Finally, this mathematical solution is analyzed together with the
original problem and if necessary, the modeling step is modified
and the process is repeated to obtain a final solution. Figure 0.1
illustrates this idea.
All the structure and ramifications of every application would
not be possible without a solid theory supporting it. Theory is the
indispensable and fundamental basis for any application. But theory
could be better understood when at the same time corresponding
methods or algorithms are used to solve a real-world problem. We
could limit ourselves to studying the interesting and challenging
questions of existence and uniqueness of solutions, but this is
sterile from the point of view of applied mathematics. The beauty
and importance of a mathematical concept may be better understood
and appreciated when it is applied to a determined problem. For
instance, the concept of an eigenvector and the power method to
compute a dominant eigenvector are clearly illustrated when we
study the mathematics behind the ranking of web pages by search
engines like Google.
Through sound theory, a long collection of examples, and
numerical computations, in this book we make an attempt to cover
all the stages shown in Figure 0.1, and to illustrate how applied
mathematics involves each component of the process toward the goal
of solving real-world problems. However, only some selected topics
in applied mathematics will be
-
PREFACE XV
considered, mainly because of limitations of space and time.
Thus, for the applications we have in mind, we need to review some
mathematical concepts and techniques, espe-cially those in linear
algebra, matrix analysis, and differential equations. Some
classical definitions and results from analysis will also be
discussed and used. Some applications (postscript fonts,
information retrieval, etc.) are presented at the end of a chapter
as an immediate application of the theory just covered, while those
applications that are discussed in more detail (ranking web pages,
compression, etc.) will be presented in chapters of their own.
This book is intended for advanced undergraduate and beginning
graduate students in mathematics, computer science, engineering,
and sciences in general, with an interest in mathematical modeling,
computational methods, and the applications of mathematics. It
contains a little more material that could be covered in one
semester. The instructor decides how much time should be devoted to
those chapters or sections dealing mainly with a review of some
material. It will mostly depend on the background level of the
students. Several chapters and sections are independent from the
rest, and although different instructors can choose different
chapters or sections to cover, here are some guidelines.
Chapters 1, 3, and 4 could be covered sequentially. Within
Chapter 1, one could cover in detail, briefly, or even skip some of
the first sections before covering the section on Bezier curves or
before going to Chapter 2 or 3. The first two sections of Chapter 2
are the additional background needed for the web page ranking
problem studied in that chapter. The first two sections of Chapter
3 may be discussed briefly to allow some extra time to study
sections three and four; in some cases, section 4 may be skipped;
although it will be needed in the second section of Chapter 7. Some
material covered in Chapter 1, and especially in Chapter 3, is used
in the study of Chapter 4.
Chapter 5 is for the most part independent from the previous
chapters, except when viewed as an application of the concepts of
linear combination and basis of vector spaces presented in Chapter
1.
The first two sections of Chapter 6 are a review of basic
material on differential equations, and more time should be spent
instead on sections three and four. This provides a good starting
point for the next chapter. In Chapter 7, the first section should
be covered relatively quickly as a background for section two on
nonlinear systems, which contains a little more advanced material.
Section three in this chapter applies the concepts studied in the
first two sections, to a concrete problem.
The final chapter is a collection of some mathematical models of
a slightly different nature; in particular, the first two sections
deal with applications of some basic discrete mathematics and
optimization, and for the most part is therefore independent from
the previous chapters.
Depending on the background of the students, among other
factors, here are a few sequences of sections that could be
followed:
• Chapter 1, Chapter 2, 3.1-3.3, 3.5, 5.1,5.3, Chapter 6,
7.1,7.2, 8.1,8.2
• 1.4, 1.7- 1.9, 1.12, Chapter 2, 3.2-3.5, Chapter 4, Chapter 5,
6.3, 6.4, Chapter 7
• 1.8, 1.9, 1.12, 2.3,2.4, 3.3-3.5, Chapter 4, 7.2,7.3, Chapter
8
-
XVi PREFACE
Besides two or more semesters of calculus, we are assuming the
student has taken some basic linear algebra and an introductory
differential equations course. Most of this material is reviewed in
this book, and those sections can be used as a reference when
studying new or more advanced topics. We also take care to
introduce results that are typically part of a graduate course. An
effort has been made to organize the book so that the transition
from undergraduate to graduate material is as smooth as possible,
and to make this text self-contained. Again, the main goal is to
introduce real-world applications where each concept or theory just
learned is used.
This book developed from lectures notes for the Applied
Mathematics course at Missouri State University, with a typical
audience consisting of some juniors and mostly seniors from
mathematics and computer science, as well as first-year graduate
students. It has been the textbook for this course since fall 2007.
Although the content and order of sections covered may vary from
semester to semester, typical sections covered are:
• 1.2,1.4.7,1.8,1.12, 2.1-2.3,3.1-3.3,3.5, 5.1,5.3, 6.3,6.4,
7.1,7.2.1,7.2.2, 7.2.5.
Selected topics from other sections, including
2.4,3.4,3.6,5.2,7.3, and 8.1- 8.4 are usually assigned as group
projects, and students are required to turn in a paper and give a
seminar presentation on the one topic assigned. Different groups
get different topics, and group discussions in class are part of
the course.
We remark that in general, theory and examples in this book will
be illustrated with the help of MATLAB software package. Previous
knowledge of MATLAB or programming is not required.
-
CHAPTER 1
BASICS OF LINEAR ALGEBRA
Undoubtedly, one of the subjects in mathematics that has become
more indispensable than ever is linear algebra. Several application
problems involve at some stage solving linear systems, the
computation of eigenvalues and eigenvectors, linear
transformations, bases of vector subspaces, and matrix
factorizations, to mention a few. One very important characteristic
of linear algebra is that as a first course, it requires only very
basic pre-requisites so that it can be taught very early at
undergraduate level; at the same time, mastering vector spaces,
linear transformations and their natural extensions to function
spaces is essential for researchers in any area of applied
mathematics. Linear algebra has innumerable applications, including
differential equations, least-square solutions and opti-mization,
demography, electrical engineering, fractal geometry, communication
networks, compression, search engines, social sciences, etc. In the
next sections we briefly review the concepts of linear algebra that
we will need later on.
1.1 NOTATION AND TERMINOLOGY
We start this section by defining an m x n matrix as a
rectangular array of elements arranged in m rows and n columns, and
we say the matrix is of order m x n. We usually denote the elements
of a matrix A of order m x n a s a^, where i = 1 , . . . m, j = 1 ,
. . . , n, and we
A First Course in Applied Mathematics. By Jorge Rebaza 1
Copyright © 2012 John Wiley & Sons, Inc.
-
2 BASICS OF LINEAR ALGEBRA
write the matrix A as
A =
an &\2 * ' ' aln &2\ 0*22 " ' 0,2n
Q"ml &m2 * ' * ^rrn
Although the elements of a matrix can be real or complex
numbers, here we will mostly consider the entries of a given matrix
to be real unless otherwise stated. In most cases, we will take
care of stating the complex version of some definitions and
results.
Matrix addition and multiplication. Given two arbitrary matrices
Amxn and Bmxn, we define the matrix
C = A + B
by adding the entries of A and B componentwise. That is, we
have
C{j := CLij ~r Oij j
fori = 1 , . . . ,ra, j = 1 , . . . , n. This means that the
addition of matrices is well defined only for matrices of the same
order.
Now consider two arbitrary matrices Amxp and Bpxn. Then we
define the product matrix &mxn — A • B as
V
k=l
where i = 1 , . . . , m, j = 1 , . . . , n. This means that to
obtain the entry (i, j) of the product matrix, we multiply the i-th
row of A with the j-th column of B entry-wise and add their
products. Observe that for the product to be well-defined, the
number of columns of A has to agree with the number of rows of
B.
EXAMPLE 1.1
Let A B - 1 2 0 3 . Then, for instance, to obtain the entry
4 - 5 3 2 1 6
C32 of the product matrix C = AB, we multiply entrywise the
third row of A with the second column of B: (1)(2) + (6)(3) = 20.
Thus, we get
C = A-B = " 4
3 _ 1
- 5 ' 2 6 _
- 1 2 0 3 L J
= -4 - 7 -3 12 -1 20
-
NOTATION AND TERMINOLOGY 3
MATLAB command: A + B, A* B.
Given a matrix BpXn, we can denote its columns with 6 1 , . . .
, 6n, where each b{ is a p-dimensional vector. We will write
accordingly,
B = [h . . . bn).
In such a case, we can write a product of matrices as
AB = A[b! •■• bn] = [Ah . . . Abnl (1.1)
so that Ab\,..., A6n are the columns of the matrix AB.
Similarly, if we denote with CL\ , . . . , CLm the rows of a
matrix AmXp, then
,4£ r ai
Q"m
5 = aiJ3 ]
amB
For an arbitrary matrix Amxn, we denote with AT its transpose
matrix, that is, the matrix of order nxm, where the rows of A have
been exchanged for columns and vice versa. For instance,
If A = -4 7 3 8
then A1 = 6 - 2
-4 3 7 8
Remark 1.1 If Amxn is a complex matrix, its adjoint matrix is
denoted as A*, where A* = AT, that is, the conjugate transpose. For
instance,
If A 3 - 4 + i -2i 5 + 2i then A* 3 2% - 4 - i 5 - 2%
• MATLAB command: A'
The sum and product of matrices satisfy the following properties
(see Exercise 1.1):
(A + B)T = AT + BT, (AB)T = £ T A T . (1.2)
Definition 1.2 The trace 0/ a square matrix A of order n is
defined as the sum of its diagonal elements, that is,
tr{A) = ̂ 2 an. (1.3)
-
4 BASICS OF LINEAR ALGEBRA
MATLAB command: trace(A)
A particular and very special case is that of matrices of order
n x 1. Such a matrix is usually called an n-dimensional vector.
That is, here we consider vectors as column-vectors, and we will
use the notation
Xi
[Xi • • • Xn}1
for a typical vector. This substitutes the usual notation x =
(x\,..., xn), which we reserve to denote a point, and at the same
time this notation will allow us to perform matrix-vector
operations in agreement with their dimensions. This also closely
follows the notation used in MATLAB .
The first two vectors below are column vectors, whereas the
third is a row vector.
9 4 3
[ 4 - 3 5]T, [1 8 5].
1.2 VECTOR AND MATRIX NORMS
It is always important and useful to have a notion for the
"size" or magnitude of a vector or a matrix, just as we understand
the magnitude of a real number by using its absolute value. In
fact, a norm can be understood as the generalization of the
absolute value function to a higher dimensional case. This is
especially useful in numerical analysis for estimating the
magnitude of the error when approximating the solution to a given
problem.
Definition 1.3 A vector norm, denoted by \\-\\,isa real function
that satisfies the following properties for arbitrary n-dimensional
vectors x and y and for arbitrary real or complex a:
(i) \\x\\ > 0, (ii) \\x\\ = 0 if and only if x = 0, (Hi)
\\ax\\ = \a\ \\x\\, (iv) \\x + y\\
-
VECTOR AND MATRIX NORMS 5
||#||i = ^2 \xi\ Sum norm i=l
1/2 v. I FjiirliHfian norm K'-'^J
/n y/* Ml 2 = ( Yl xl ) Euclidean norm
IÎ Hoo = max \x{\ Maximum norm
• MATLAB commands: norm(#, 1), norm(x) norm(x,inf)
EXAMPLE 1.2
Letx = [3 - 2 4 v/7]T.Then,
||a:||i = |3| + | - 2 | + |4| + |>/7 |« 11.6458. ||x||2 = V9
+ 4 + 16 + 7 = 6. W 0 0 = m a x { | 3 | , | - 2 | , |4|, |A /7 |} =
4.
Remark 1.4 In general, for an arbitrary vector x £ Rn, the
following inequalities (see Exercise 1.4) relate the three norms
above:
Nloo < IMh < ||x||i. (1.5)
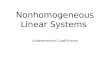
EXAMPLE 1.3
The unit ball in E n is the set {x e Mn : ||x|| < 1}. The
geometrical shape of the unit ball varies according to what norm is
used. For the case n = 2, the unit balls for the three norms in
(1.4) are shown in Figure 1.1.
Note: For simplicity of notation, || • || will always denote the
Euclidean norm || • H2 for vectors, unless otherwise stated.
We now introduce the notion of norms for a matrix, in some sense
as a generalization of vector norms.
Definition 1.5 A matrix norm is a real function that for
arbitrary matrices A and B and arbitrary real or complex a,
satisfies
d) Mil > 0, (ii) \\A\\ = 0 if and only if A = 0, (Hi) \\aA\\
= |a|||j4||,
-
6 BASICS OF LINEAR ALGEBRA
- , . 5 | . _ .
1 h Jv
O . S h / \
° I \ / ^ O.S k \ / -J
r— r~*n
Co) 1'5| ' T ' 1
-i L J
o . s h J
o —W
O.S p -H
_ i L I 1 J
o -i - 1 O -I
Figure 1.1 Unit ball in (a) || • ||lf (b) || • ||2, (c) || •
||oo.
(iv) P + JB||
-
VECTOR AND MATRIX NORMS 7
Remark 1.7 There are two other ways of defining the Frobenius
norm, which are useful for certain computations, as we illustrate
later on. Let Amxn be an arbitrary matrix, and denote its columns
with a i , . . . , an. Then,
(a) \\AfF = | |a i | | | + - . . + | |an | | l . (1.7)
(b) \\A\\% = tv(ATA). (1.8)
It seems natural to think that vector norms can be directly
generalized to obtain matrix norms (after all, mxn matrices can be
thought of as vectors of dimension m • n). However, not all vector
norms directly become matrix norms (see Exercise 1.11).
A matrix norm can be induced or constructed directly from a
vector norm by defining for 1 < p < oo
\\A\\P = max \\Ax\\p, (1.9) N I P = I
where the norms on the right-hand side represent the vector
norm. This is the way to correctly extend or use a vector norm into
obtaining a matrix norm.
Given a vector x of norm ||#||, when it is multiplied by A, we
get the new vector Ax of norm || Ax\\. Thus, we can interpret the
matrix norm (1.9) as a natural way to measure how much the vector x
can be stretched or shrunk by A.
The definition of the p-norm of a matrix in (1.9) is not easy to
implement or compute in general. Luckily enough, there are
alternative ways to compute such a norm for some particular values
of p.
EXAMPLE 1.5
It can be proved (see Exercise 1.12) that for p = 1 and p = oo,
the p-norms in (1.9) can be directly computed through the
corresponding definitions in (1.6).
■ EXAMPLE 1.6
For p = 2, the p-norm in (1.9) can be computed as the square
root of the largest eigenvalue of the symmetric matrix AT A. That
is,
||^4||2 = maxjv/X : A is an eigenvalue of AT A}. (1.10)
For instance, for the matrix of Example 1.4, we get || A\\2 ~
5.9198.
Remark 1.8 It is possible to show that an equivalent way to
define the matrix norm (1.9) is
||A||p = 8 u p J ! ^ . (1.11)
-
8 BASICS OF LINEAR ALGEBRA
Remark 1.9 In general, inequalities for matrix norms similar to
the ones in (1.5) are not true. However, it is still true that
\\Ah
-
SPECIAL MATRICES
Following (1.15), we also see that for arbitrary AmXn, x e Rn, y
G E m ,
< Ax, y >= (Ax)Ty = xTATy = < x, ATy > . (1.17)
Remark 1.11 The dot product introduced here is a particular case
of the general inner product function studied in the context of
inner product vector spaces, where the elements are not restricted
to real n-dimensional vectors.
There is a special kind of vectors that is very useful in
several instances in linear algebra and matrix computations. These
are the so-called orthonormal vectors, which are orthogonal
(perpendicular) to each other and they are unit, that is, x and y
are orthonormal if
xTy = 0, and ||x|| = ||y|| = 1.
For example, the following set of vectors is orthonormal:
Vi _2_ o - VE. V2 = -7= ° -7= \/5 \ /5 ,
V3 = [0 - 1 0]T.
In fact, we can readily verify that
v[v2 = v[vs = v%v3 = 0, and ||vi|| = ||v2| *>3 1.
1.4 SPECIAL MATRICES
We will be using matrices at almost every place in this book,
matrices of different kinds and properties. Here we list some of
the most common types of matrices we will encounter.
1.4.1 Diagonal and triangular matrices
A square matrix A of order n is called diagonal if a^ = 0 for
all i ^ j .
EXAMPLE 1.7
A = ' 4 0
0 1 0 0
0 0
- 9
MATLAB command: diag
A square matrix A of order n is called upper (resp. lower)
triangular if a^ = 0 for all i > j , (resp. for all i <
j).
-
10 BASICS OF LINEAR ALGEBRA
■ EXAMPLE 1.8
" 4 2 5 " 0 1 3
_ 0 0 9 _ , B =
' 4 0 0 " 5 1 0 7 1 9
The matrix A is upper triangular, and B is lower triangular.
• MATLAB commands: triu, tril
Remark 1.12 If the matrix A is rectangular, say order m x n, we
say it is upper (resp. lower) trapezoidal ifaij = 0 for all i >
j (resp. for all i < j).
A more general case of triangular matrices is that of block
triangular matrices. For example, the following 5 x 5 matrix is
block upper triangular
" - 8 1 4 - 2 0 0 0 0 0 0
0 9 8 5 5 7
- 9 - 8 0 0
3 1 5 1 4
- 6 J where for instance, the zero in the (2,1) entry of the
matrix on the right represents the corresponding 2 x 2 zero block
of the matrix on the left. In a similar way, a block diagonal
matrix can be defined. We will encounter this type of matrices in
Section 1.10 when we compute eigenvalues of a matrix and when
compute special vector subspaces later in Chapter 7.
1.4.2 Hessenberg matrices
A matrix Anxn is called an upper Hessenberg matrix if a^ = 0 for
alH > j + 1 . They take the form:
a n ^ 2 1
0 0
0
a i 2
^22
^32 0
0
a i 3
« 2 3
« 3 3
« 4 3
0
In other words, it is an upper triangular matrix with an
additional subdiagonal below the main diagonal. A matrix A is
called lower Hessenberg if AT is upper Hessenberg.
An A12 A13 0 A22 A23 0 0 A33
ain-i ain
Q
-
SPECIAL MATRICES 11
1.4.3 Nonsingular and inverse matrices
In the set of real numbers R, the number 1 is the multiplicative
identity, meaning that a -1 = 1 • a = a, for any real number a.
This is generalized to what is called the identity matrix of order
n, denoted by / . It consists of a diagonal of ones, and every
other entry is zero (see (1.21) below), with the property that
AI = IA = A,
for any matrix A.
• MATLAB command: eye(n).
A square matrix A of order n is called nonsingular if its
determinant is not zero: det( A)^ 0. Otherwise it is called
singular.
EXAMPLE 1.9
det " 4 2
1 1 7 1
9 0 3
= —48. Hence, the matrix is nonsingular.
• MATLAB command: det(A).
Remark 1.13 Two very useful properties of determinants are the
following:
det(AB) = det A det B, (1.19)
det A" 1 = 1/detA
In one dimension, every real number a ^ 0 has a unique
multiplicative inverse 1/a, and it is obvious that a ( £ ) = ( £ )
a = l. This has a natural generalization to matrices. A nonsingular
matrix Anxn has a unique nx n inverse matrix, denoted by A~x with
the property that
A A'1 =A~1A = L (1.20)
For this reason, nonsingular matrices are also called
invertible.
• MATLAB command: inv(A).
-
12 BASICS OF LINEAR ALGEBRA
EXAMPLE 1.10
Let A = 4 0 9 1 - 1 0
-2 1 0 . Since det(A) = —9, the matrix is nonsingular and
has
an inverse: A 1 = 0 -1 - 1 " 0 -2 -1
_ 1/9 4/9 4/9 _ , and we can ven
A A'1 =A~1A = I = " 1 0 0 0 1 0 0 0 1
(1.21)
Computing the inverse of a matrix is not an easy task. There is
more than one analytical or exact way to do this, e.g., using the
adjoint method, we have
A'1 = adjoint (A) /det (A).
However, this method is rarely used in practice, and we do not
discuss it here. A second and more efficient method is through
Gauss elimination (see Section 3.1). In general, the computation of
the inverse of a matrix has to be done numerically, and great care
has to be taken due to potentially large accumulation of errors for
some matrices. Thus, in practice it is customary to avoid computing
the inverse of a matrix explicitly, and some other options must be
used. We will discuss these issues later on.
Remark 1.14 For the inverse of a product of nonsingular
matrices, we have
(A1A2--.Ak)-1 =A^A-l_l---A^\ (1.22)
1.4.4 Symmetric and positive definite matrices
A square matrix A of order n is called symmetric if A = A7',
that is, the matrix equals its transpose. If A = (a^), then we can
also say A is symmetric if a^ = a^, for i,j = l , . . . , n .
EXAMPLE 1.11
The following matrices are symmetric:
A = 1 4 4 9
1 - 2 7 -2 3 5 7 5 6