Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON COMPUTERS, VOL. C-30, NO. 1, JANUARY 1981 81
[3] O. G. Chang, "Utilization of microprocessors in the synthesis of sequential machines," Ph.D. dissertation, Pennsylvania State Univ., University Park, PA, 1978, ch. 6.
[4] D. J. Hamilton and W. G. Howard, Basic Integrated Circuit Engineering. New York: McGraw-Hill, 1975, ch. 15.
Fig. 6. Oscilloscope photograph for the programming sequence O R / N O R / N A N D / A N D obtained from a discrete prototype. Horizontal scale: 2 μ 8 ^ ί ν . Vertical scale: 5 V/div.
A •
Β -
C I
A
Β
C F
D
' C O
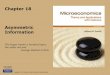
Fig. 7. Implementation of a full adder with two programmable gates.
terminals C and D to VDD ("1") or to ground potential ("0"). In this fashion, the gate's identity is defined statically, and the full potential of the gate is not exploited. The application of the dynamic pro-grammability of the gate in the design of complex circuits can be illustrated, considering the case of a full adder with input variables A, B, and C, and outputs S and Co. Analysis of the truth table for this circuit indicates that the functions S and Co can be expressed as
S = A@B d = " Γ
S = A ® Β C, = "0"
C0 = A + B C/ = " l "
C0 = A Β Ci = "0"
(9.1)
(9.2)
(9.3)
(9.4)
where C, has been used as a control variable. Table I indicates that the full adder can be readily implemented with two programmable gates, as shown in Fig. 7.
VI. CONCLUSIONS
A new functional block for the design of logic circuits has been developed. The gate can be dynamically programmed to realize the functions OR, NOR, AND, NAND, XOR, and XNOR of two logic variables. The basic circuit requires only eight transistors and exhibits a propagation delay, which is equivalent to the delay of two simple coincidence gates. It has been shown that utilization of the programmable gate results in efficient implementations of complex digital circuits.
A Fault Diagnosis Algorithm for Asymmetric Modular Architectures
GERARD G. L. MEYER
Abstract—This paper is devoted to the analysis of an algorithm for the automatic fault diagnosis of asymmetric modular networks. The network model used is the one proposed by Preparata et al. [14], the faults are assumed to be solid, and the Hakimi-Amin /-diagnosability hypothesis is supposed to be satisfied.
Index Terms—Connection assignment, diagnosis algorithm, modular architecture, permanent fault, syndrome.
PRELIMINARIES
Consider a system S of η modules Uo, U\, · · ·, U„- \ and a testing interconnection assignment Ε = \(i,j)\U, tests Uj}. It is assumed that when (i,j) is in E, the test outcome a{j of U,- testing Uj is a,j = 0, if Uj believes Uj to be nonfaulty and a,j = 1 if U,- believes Uj to be faulty. A complete set of test outcomes, i.e., an outcome a,j for each (/, j) in Ε is called a syndrome. The diagnosis problem consists in identifying the set Fs of faulty modules from the knowledge of one of the possible corresponding syndromes. In this correspondence we assume that the only faults that may occur are solid, and that the test-module fault interrelationship satisfies at least the Preparata-Metze-Chien assumption [14].
Hypothesis 1: 1) if is in Ε and U,- is nonfaulty, then a,j = 0 implies that Uj
is nonfaulty; 2) if (i,j) is in Ε and Ut is nonfaulty, then a,-j = 1 implies that Uj
is faulty; and 3) if (/, j) is in Ε and U,- is faulty, then Uj may be nonfaulty or
faulty regardless of the value of a,j. Suppose that the set S is partitioned into G$ and Fs, where Gs is
the set of all the nonfaulty modules and F$ is the set of all the faulty modules. Given (Gs, Fs)> Hypothesis 1 implies that only a subset of all possible syndromes may occur. The determination of all possible syndromes that correspond to a given partition (Gs, Fs) of S is explicit and not difficult. On the other hand, the problem we address in this correspondence—given a syndrome produced by a partition (Gs, Fs)of S, find (Gs, Fs)—is implicit and much more difficult to solve.
Although there exist various concepts of system diagnosability, in this correspondence only diagnosability without repair will be considered. The following basic definition was given by Preparata et al. and was proposed in [14].
Definition 1: A system S is one-step /-fault diagnosable if all faulty modules within the system can be identified without replacement, provided the number of faulty modules present does not exceed t.
Conditions that are necessary for one-step /-diagnosability have been proposed by Preparata et al. [14], criteria that are sufficient to
REFERENCES
[1] W. S. Jevons, "On the inverse, or inductive, logical problem," Mem. Manchester Lit. Phil. Soc, vol. 5, pp. 119-130, 1871.
[2] F. M. Brown, "Equational logic," IEEE Trans. Comput., vol. C-23, pp. 1228-1237, Dec. 1974.
Manuscript received November 28, 1979; revised July 3, 1980. This work was supported by the Office of Naval Research under Contract Ν00014-75-C-1196.
The author is with the Department of Electrical Engineering, The Johns Hopkins University, Baltimore, MD 21218.
0018-9340/81 /0100-0081 $00.75 © 1 9 8 1 IEEE

82 IEEE T R A N S A C T I O N S O N C O M P U T E R S , VOL. C-30, N O . 1, J A N U A R Y 1981
ensure one-step ί-diagnosability have been proposed by Preparata et al. in the case of Dht testing interconnection [14], and by Hakimi and Amin [5] in the general case, and finally conditions that are both necessary and sufficient to ensure one-step ί-diagnosability were obtained by Hakimi and Amin [5] and by Allan et al. [1].
CONSISTENT PARTITIONS AND IMPLIED SETS
It is clear that not all the partitions of S into nonfaulty and faulty modules may explain a given syndrome. For example, if a,j = 1, then it is not possible for both U,- and Uj to be nonfaulty. Thus, we are led to define the family of all the partitions of S that are consistent with a given syndrome.
Definition 2: A partition (G, F) of S is consistent (with a given syndrome) iff 1) U,- in G and a,j = 0 imply that Uj is in G; and 2) U,-in G and aitj = 1 imply that Uj is in F.
Thus, partition (G, F) of S is consistent with a given syndrome iff the assumption that all the modules in G are nonfaulty and all the modules in F are faulty is consistent with the syndrome. The partition (Gs, Fs) is obviously consistent and it is, therefore, reasonable to investigate the structure of the family of all consistent partitions. Our approach consists of using the concept of implied faulty set of a module.
Definition 3: The implied faulty set L(U,) of a module U,- (with respect to a given syndrome) is the set of all the modules in S that may be deduced to be faulty under the assumption that Uj is nonfaulty.
When the concept of implied faulty set is used, the following results may be obtained without much difficulty.
Corollary I: If Uj is in L{Uj), then U,- is in L(Uj). Corollary 2: If au = 0, then L(Uj) Ξ2 L(Uj). Corollary 3: If a partition (G, F) of S is consistent, then L(G) ^
F, where L(G) = \Uj in S\Uj is in L(U,) and U,- is in G}. Corollary 4: If a partition (G, F) of S is consistent, then
F=> \Ui\Ui belongs to L(£/,·)).
Corollary 5: If a partition (G, F) of S satisfies L(G) = F, then (G, F) is a consistent partition of S.
M INIMAL CONSISTENT PARTITIONS
The set Fs consists of all the modules of S that are actually faulty and therefore, the partition (Gs, Fs) is consistent with every possible corresponding syndrome. Unfortunately, there usually exist many partitions that are consistent with any given syndrome. Thus, given a syndrome, it is not possible to identify the faulty modules without additional assumptions.
If it is assumed that the a priori probability that a set F is faulty is inversely proportional to the cardinality \\F\\ of F, then it is reasonable to look for the consistent partitions of 5" that are the most likely to occur. Such partitions, called minimal consistent partitions [ 1 ] , [6], are the solutions of the following problem.
Problem 1: Given a syndrome, find a consistent partition (G# , F#) of S such that | | F # | | < ||F|| for all the partitions (G, F) of S that are consistent with the syndrome.
The concept of implied faulty sets may be used again to obtain a necessary characterization of the minimal consistent partitions.
Corollary 6: If (G, F) is a minimal consistent partition of S, then F = L(G).
Suppose that the number of faulty modules does not exceed /. Then there exists at least one consistent partition (G, F) such that ||F|| < t. If there exists only one such partition, then there exists only one minimal consistent partition F#) and F# = Fs- Thus, in the context of our paper, one-step-i-diagnosability reduces to the following.
Definition 4: A system is one-step ί-diagnosable iff whenever there exists a consistent partition (G, F) such that ||F|| < /, then F is the unique solution of Problem 1.
Let C be the family of all the consistent partitions that satisfy the necessary conditions of optimality given in Corollary 6. A possible approach to solve Problem 1 consists in searching the family C for the minimal partitions. An algorithm based on this idea has been
proposed by Allan et al. in [6]. Although the general idea behind the proposed algorithm is correct, the implementation described in [6] may not be entirely correct as indicated in [3].
The search approach does not take into account the structure of the testing interconnection assignment and is essentially a branch and bound procedure. In the next section, we propose an algorithm which is designed to take advantage of that structure.
DIAGNOSIS ALGORITHM
The algorithm proposed is specifically designed Xo solve Problem 1 when the Hakimi-Amin diagnosability conditions [5] are satisfied. For the convenience of the reader, these sufficient conditions are repeated below.
Hypothesis 2: 1) No two modules test each other. 2) Every module is tested by at least t other modules. When Hypothesis 2 is satisfied, the following relationships exist
between the implied faulty set and faulty and nonfaulty modules. Corollary 7: Suppose that Hypotheses 1 and 2 are satisfied and
the number \\Fs\\ of faulty modules is less than or equal to t. 1) If L(Uj) = φ, then U( is nonfaulty. 2) If Uj is nonfaulty, then \\L(Ui)\\ < \\FS\\. 3) If \\L(Ui)\\ > \\FS\\ + 1, then tyis faulty. 4) If Uj belongs to L(Uj), then U,- is faulty. Corollary 7 shows that when \\L(U,-) || is small, the corresponding
module is probably nonfaulty, and when ||/,(£//) II is large, the corresponding module is probably faulty. More precisely, if ||L(£/,)|| = 0, then Uj is not faulty, and if ||L((//)|| > | |F 5 | | + 1, then Us is faulty. These remarks lead us to the idea behind the construction of the proposed algorithm, namely to identify as faulty those modules that maximize || £((/,· )||. Thus, the iterative procedure generates an increasing sequence of sets that are hopefully faulty, and the algorithm stops when all the faulty modules have been obtained.
Suppose that at iteration k we have obtained a set of modules Fk
identified as faulty, and we let F% be the set of all remaining modules, where Fc
k is the complement of Fk, with respect to S. We compute the implied faulty set with respect to Fc
k of all the modules on which we have as yet no opinion, i.e., all the modules in Fc
k. Given a module Uj in Fc
k, the implied faulty set of Uit with respect to Fc
k, is the set of all the modules in Fc
k that may be deduced to be faulty under the assumption that Uj is not faulty. Thus, the implied faulty set of U,- with respect to Fc
k is simply L(Ui) η Fc
k. We then find all the modules in Fc
k that maximize \\L(Uj) η Fk\\ over all the modules Uj in Fc
k, and we add them up to the set Fk to obtain Fk+\. We proceed in this manner until we finally obtain a set F, such that L(U,) η Fc = φ for all the modules (/,· in Fc.
We now present a precise description of our procedure. Algorithm I: Step 0: Let F 0 = ( ( / , ·1be longs to L(U,)} and let k = 0. Step 1: Let hk = max |||L(i/,-) η Fc
k\\\Ui in Fc
k\. Step 2: If hk = 0, let FB = Fk, let GB = Fc
k, and stop; otherwise, go to Step 3.
Step 3: Let F * + I = Fk υ \U,\ \\L(U,-) η Fe
k\\ = hk\. Step 4: Let k = k + 1 and go to Step 1. It is known that D^t testing interconnection assignments possess
many interesting properties. In fact, an algorithm has been proposed in [12] for that case. It is, therefore, interesting to note that, when a Db {testing interconnection assignment is used, Algorithm 1 yields the set of faulty modules. The proof of the result is based on the analysis presented in [12] and has been deleted.
Theorem I: If a D6t testing interconnection assignment is used, and if | |F 5 | | < t, thenF* = Fs.
At this point, we do not have any reasons, except for heuristic ones, to believe that Algorithm 1 generates the set of faulty modules for more general testing interconnection assignments. Our approach to the study of the behavior of the algorithm consists First in proving that if a conjectural lemma is true, then Algorithm 1 exhibits the desired behavior, and then in presenting conditions on the cardinality of Fs that insure that the conjectural lemma is true.
Lemma I (conjectural): Let S be a system of η modules. If: 1) Fs

IEEE T R A N S A C T I O N S O N C O M P U T E R S , VOL. C-30, N O . 1, J A N U A R Y 1981 83
is nonempty; 2) Hypothesis 1 is satisfied; 3) no two modules test each other; 4) every module is tested by at least \\Fs II other modules; and 5) V,· is not in L(V,) for all Vj in S, then there exists at least one module (/,· in Fs such that
\\L(U,)\\ > \\Fs\\ + 1.
Lemma 2: If: 1) Hypotheses 1 and 2 are satisfied; 2) the number of faulty modules ||Fs|| < t; and 3) Lemma 1 is true, then FB = FS.
Proof: Suppose that at iteration k the set Fk generated by Algorithm 1 is a strict subset of the set of faulty modules Fs. The number of faulty modules not in Fk is \\Fs — Fk || and, therefore, if a module (7, in Fc
k is nonfaulty, the number of modules in L(V,) η Fc
k is at most \\Fs - Fk ||. Thus, if V, in Fk' is nonfaulty
\\L(Ui)nFi\\ < \\FS-Fk\\. '
Now, delete from the syndrome all the tests to and from the modules in Fk and delete Fk from S. By construction, all the modules V,·, such that Vi is in L(V,) are in Fo. Thus, the remaining system F% possesses the following properties:
1) Hypothesis 1 is satisfied, 2) no two modules test each other, 3) every module in F% is tested by at least \\Fs — Fk || other mod
ules in Fc
k, and 4) Vi is not in L(V,) for all the modules V,· in F%. Thus, if Lemma
1 is true, there exists at least one module Vi in Fc
k, such that
\\L(Vi) η F'k\\ > \\FS-Fk\\+ 1
and, therefore, hk > \\FS - Fk\\ + 1. We conclude that Fk+\ is a subset of Fs and that Fk+ \ D Fk. We already know that the set F 0
used in Step 0 of Algorithm 1 is a subset of Fs and, therefore, the set FB generated by Algorithm 1 is equal to the set of faulty modules Fs-
We show in [13] that Lemma 1 is true whenever \\Fs\\ ^ 25. Although the lemma may hold for larger values of \\FS ||, we do not know at this point if the lemma is always true, or if there exists an upper bound on the value of Fs for which the lemma holds. In any case, the fact that Lemma 1 is true when the cardinality of the faulty set is no larger than 25 implies the following result.
Theorem 2: If 1) Hypotheses 1 and 2 are satisfied; 2) \\FS\\ ^ t, and 3) \\Fs II ^ 25, then the set FB generated by Algorithm 1 is equal t o F s .
CONCLUSION
We have presented an algorithm which allows us to obtain minimal consistent partitions, provided that the Hakimi-Amin conditions are satisfied, and that either a Z \ , interconnection assignment is used or the number of faults is no larger than 25. It is clear that the algorithm may be modified to increase its efficiency. For example, we may include in the set Fk+ \ all the modules in S which believe that at least one module in Fk is nonfaulty. These modifications only complicate the presentation of the algorithm and are not difficult to implement. Note that the approach we have followed to develop Algorithm 1 differs from the approach used by Corluhan and Hakimi [3] in that we only identify faulty modules. The algorithm presented in [3] identifies either a faulty or nonfaulty module at every iteration (provided that the conjecture that the identification may be performed is true). It is clear that the diagnosability results we have obtained are still true whenever the test-module fault interrelationship satisfy at least Hypothesis 1: thus, our results hold when the Barsi, Grandoni, and Maestrini model [2] is used. Finally, the interested reader may find a more detailed version of this paper in [ 13].
REFERENCES
[ 1 ] F. J. Allan, T. Kameda, and S. Toida, "An approach to the diagnosability analysis of a system," IEEE Trans. Comput., vol. C-24, pp. 1040-1042, Oct. 1975.
[2] F. Barsi, F. Grandoni, and P. Maestrini, "A theory of diagnosability of digital systems," IEEE Trans. Comput., vol. C-25, pp. 585-593, June 1976.
[3] A. M. Corluhan and S. L. Hakimi, "On an algorithm for identifying faults in a t-diagnosable system," in Proc. 1976 Conf. on Inform. Sci. Svst., Elec. Eng. Dep., The Johns Hopkins Univ., Baltimore, MD, Apr. 1976, pp. 370-375.
[4] H. Fujiwara and K. Kinoshita, "Some existence theorems for probabilistically diagnosablc systems," IEEE Trans. Comput., vol. C-27, pp. 379-384, Apr. 1978.
[5] S. L. Hakimi and A T. Amin, "Characterization of connection assignment of diagnosablc systems," IEEE Trans. Comput., vol. C-23, pp. 86-88,Jan. 1974.
[6] T. Kameda, S. Toida, and F. J. Allan, "A diagnosing algorithm for networks," Inform. Contr., vol. 29, pp. 141-148, 1975.
[7] C. R. Kime, "An analysis model for digital system diagnosis," IEEE Trans. Comput., vol. C-19, pp. 1063-1073, Nov. 1970.
[8] S. Ν. Maheshwari and S. L. Hakimi, "On models for diagnosable systems and probabilistic fault diagnosis," IEEE Trans. Comput., vol. C-25, pp. 228-236, Mar. 1976.
[9] S. Mallcla and G. M. Masson, "Diagnosable systems for intermittent faults," IEEE Trans. Comput., vol. C-27, pp. 560-566, June 1978.
[10] G. G. L. Meyer and G. M. Masson, "An efficient fault diagnosis algorithm for multiple processor architectures," in Proc. 1976 Conf. on Inform. Sci. Syst., Elec. Eng. Dep., The Johns Hopkins Univ., Baltimore, MD, Apr. 1976, pp. 249-251.
[11] G. G. L. Meyer, "Fault diagnosis of modular networks with a small number of faults," in Proc. 15th Ann. Allerton Conf on Commun. Contr. and Comput., Allerton House, Monticello, IL, pp. 727-731, Sept. 1977, pp. 727-731.
[12] G. G. L. Meyer and G. M. Masson, "An efficient fault diagnosis algorithm for symmetric multiple processor architectures," IEEE Trans. Comput., vol. C-27, pp. 1059-1063, Nov. 1978.
[13] G. G. L. Meyer, "A fault diagnosis algorithm for asymmetric modular architectures," Elec. Eng. Dep., The Johns Hopkins Univ., Baltimore, MD, Rep. JHU 79-9, Sept. 1979.
[14] F. P. Preparata, G. Metze, and R. T. Chien, "On the connection assignment problem of diagnosable systems," IEEE Trans. Electron. Comput., vol. EC-16, pp. 848-854, Dec. 1967.
[15] J. D. Russell and C. R. Kime, "System fault diagnosis: Closure and diagnosability with repair," IEEE Trans. Comput., vol. C-24, pp. 1078-1089, Nov. 1975.
[16] J. D. Russell and C. R Kime, "System fault diagnosis: Masking, exposure, and diagnosability without repair," IEEE Trans. Comput., vol. C-24, pp. 1155-1161, Dec. 1975.
[17] J. E. Smith, "Universal.system diagnosis algorithms," IEEE Trans. Comput., vol. C-28, pp. 374-378, May 1979.
Observations Concerning the Complexity of a Class of On-Line Algebraic Problems
M I C H A E L L. F R E D M A N
Abstract—In this correspondence we define and study a class of on-line algebraic problems; a particular problem in this class is specified by providing an η Χ η matrix A. We show that the question of algebraic complexity reduces to determining the existence of what we call (r, u) factorizations of A. Given an η Χ η matrix A, a factorization A = RU (R and U are η X m and m Xn matrices, respectively; m unconstrained) is called an (r, u) factorization, provided that no row of R has more than r nonzero entries and no column of U has more than u nonzero entries. The existence of (r, u) factorizations is explored from a general perspective.
Index Terms—Algebraic complexity, algorithms, data structures, matrix factorization, on-line complexity.
Manuscript received November 10, 1978; revised May 26,1980. This work was supported in part by the National Science Foundation under Grant MCS76-08543.
The author is with the Department of Electrical Engineering and Computer Sciences, University of California-San Diego, La Jolla, CA 92093.
0018-9340/81/0100-0083$00.75 © 1981 I E E E