Embed Size (px)
Citation preview

A Double Homotopy Approach for Decentralized ∞ Control of Civil Structures
Chunxu Qu 1,2
, Linsheng Huo 1,,†
, Hongnan Li 1, Yang Wang
2
1 Faculty of Infrastructure Engineering, Dalian University of Technology, Dalian 116024,
China 2 School of Civil and Environmental Engineering, Georgia Institute of Technology,
Atlanta, GA 30332, USA
ABSTRACT
This paper presents a decentralized ∞ controller design for the vibration control of
civil structures. The formulation through double homotopy is proposed in discrete time
domain and considers feedback time delay. It is well known that through bounded real
lemma, ∞ controller design can be transformed to an optimization problem with bilinear
matrix inequality (BMI) constraints. To obtain a decentralized ∞ controller constrained
by special block-diagonal patterns on controller matrices, there is generally no off-the-
shelf package or numerical algorithm to solve the BMI problem. This paper proposes a
double homotopy method to solve the BMI problem in discrete time domain. The method
approximates the BMI problem to a series of linear matrix inequality (LMI) problems
along two homotopic paths, and gradually deforms a centralized controller to a
decentralized controller. The proposed method is first studied numerically with a six-
story building example, and then validated experimentally through shaking table tests of
a two-story frame with active mass dampers.
KEY WORDS: structural control; decentralized control; bilinear matrix inequality;
double homotopy; time delay; civil structures
INTRODUCTION
Excessive dynamic excitations upon civil structures, such as earthquakes and wind
load, can cause significant structural vibrations and result in damage to structural
components. Structural control is a promising method to protect structures from damage.
A great amount of research efforts have been devoted to active or semi-active feedback
control [1-4]. Such a feedback control system contains sensors, controllers, and control
devices. Sensors measure structural vibration data caused by external excitations. Sensor
data is then transmitted to controllers, which make control decisions accordingly, and
command the control devices to generate desired forces for vibration reduction.
Traditional structural feedback control adopts centralized control schemes, where a
centralized controller requires data from all sensors in the structure and delivers
Correspondence to: Linsheng Huo, of Infrastructure Engineering, Dalian University of Technology,
Dalian 116024, China.
†E-mail: [email protected]
command to all structural control devices. Particularly for large-scale civil structures, a
centralized feedback control scheme places high requirements on real-time
communication range and data transmission rate, which result in economical and
technical difficulties in practical implementation.
As an alternative, decentralized control architectures can be employed. A
decentralized architecture allows control decisions to be made using sensor data only in
the neighborhood of a control device [5, 6]. As a result, communication range and data
transmission rate are reduced. Feedback latency of the control system is also shortened.
Decentralized control has been investigated in applications such as power transmission
networks, economic systems, and space systems [7]. However, decentralized structural
control has only been studied in recent years. For example, Lynch and Law [8] discussed
modified decentralized LQR control and decentralized market-based control for large-
scale civil structures. Xu et al. [9] proposed a decentralized tendon control algorithm for
a cable-stayed bridge with neural networks. Swartz and Lynch [10] employed the
redundant Kalman state-estimators for distributed structural control system. Rofooei and
S.Monajemi-Nezhad [11] investigated decentralized schemes in which instantaneous
optimal control schemes are used with different control feedbacks. Lu et al. [12]
described the fully decentralized sliding mode control algorithms, which make control
decision based on the stroke velocity and displacement measured on a control device. Ma
et al. [13] studied decentralized robust control of building structures by treating the
interconnections between adjacent subsystems as bounded disturbances. Loh and Chang
[14] compared four groups of centralized/decentralized control algorithms, including
fully centralized, fully decentralized, half centralized, and partially decentralized control.
More recently, feedback time delay, such as due to communication and computing, is
taken into consideration for decentralized dynamic output feedback control [15, 16]. In
general, the more sensor data each control device requires, the larger the time delay is.
Time delay can be measured and calculated as part of the system performance, such as
for a wireless feedback control system [17]. Considering feedback time delay in the
control formulation, this paper presented a new ∞ structural control design for
decentralized dynamic output feedback control in discrete time domain.
Bounded real lemma [18] can be used to provide an effective method to calculate
the ∞ controller matrices. The controller matrices are constrained by bilinear matrix
inequality (BMI) [19]. When no special patterns are required on controller matrices, the
matrices can be solved by projection lemma [18]. On the other hand, when a
decentralized controller is desired, block-diagonal patterns are required on the controller
matrices. The pattern requirement makes the decentralized controller design a non-
convex and NP-hard problem. There is no general off-the-shelf package or numerical
algorithm for this decentralized control problem. For example, when the PENNON
(PENalty methods for NONlinear optimization) package was attempted for solving non-
convex optimization problems, it was realized the idea was not yet mature and further
tuning was needed [20]. Wang [16] modified a continuous-time homotopy method for
discrete-time decentralized ∞ controller design with feedback time delay. Along the
homotopy path, the centralized controller is gradually transformed to a decentralized
controller. Only linear matrix inequality (LMI) problems are involved at each homotopy
step, which avoids directly solving the BMI problem. As an alternative method to deal

with BMI constraints, Mehendale and Grigoriadis [21] proposed a double homotopy
approach for decentralized ∞ control in continuous time domain without time delay.
This paper modifies the double homotopy method for decentralized control design in
discrete time domain and considering feedback time delay. Along one homotopy path,
the centralized controller is slowly deformed to a decentralized controller. Along the
other homotopy path, the solution to the BMI problem is gradually improved by local
linearization. In a previous discrete-time homotopy approach described by Wang [16], at
every homotopy step, the controller matrix or the Lyapunov matrix is held constant in
turn while solving the other. In comparison, the double homotopy approach updates the
controller matrix and Lyapunov matrix simultaneously by local linearization to the
original BMI problem. In addition, minimization of closed-loop ∞ norm is performed
at every double homotopy step, in order to avoid resulting in a decentralized controller
with a very large ∞ norm. Both numerical simulations and laboratory experiments
were performed to validate the proposed discrete-time decentralized control design
through double homotopy.
The paper first introduces the problem formulation for decentralized structural
control considering time delay. The decentralized ∞ control through double homotopy
transformation in discrete time domain is then presented. A six-story numerical example
is described to illustrate the decentralized ∞ control performance. Finally, the paper
describes experimental validation through shaking table tests of a two-story frame with
active mass dampers.
PROBLEM FORMULATION
Consider a second-order differential equation describing the dynamics of an n
degree-of-freedom (DOF) shear-frame structure:
1 1w uMq Cq Kq T w T u (1)
where , , n nM C K are the mass, damping, and stiffness matrices, respectively; 1 1
1wn
w
is the external excitation vector; 1unu
is the control force vector; Tw1 and
Tu are the location matrices for excitation w1 and control force u, respectively. When the
excitation w1 is the unidirectional earthquake acceleration gq , the excitation location
matrix can be found as 1 1{1}w nT M . The relative displacement vector q1n is
defined as:
T
1 2 nq q q q (2)
where qi denotes the relative displacement (with respect to the ground) of the i-th floor.
To suppress excessive structural vibration excited by w1, appropriate control force u
should be imposed on the structure. In an optimal feedback control system, a controller is
pre-designed. During system operation, according to available sensor measurements, the

controller decides in real time the optimal control force to be applied by each control
device. In practice, sensor measurements are usually contaminated by noises. In addition,
transmission of measurement data to controller, as well as controller computation, causes
time delay in the feedback loop.
To describe both sensor noise and feedback time delay, the structural system in
Eq.(1) can be re-written into state space representation and transformed from continuous
time domain to discrete time domain. The structural system is then concatenated with an
auxiliary LTI (linear time-invariant) system describing the sensor noise and time delay,
as shown in Figure 1. After the concatenation, the discrete-time open-loop system can be
formulated as [16]:
Excitation
w1[k]
Response
output z[k]
Sensor
measurement
m[k]
Time Delay System
with Noise and
Signal Repeating
Sensor
noise w2[k]
Controller SystemFeedback
signal y[k]
Control
force u[k]
Open-loop system
Closed-loop system
Structural System
Figure 1. Diagram of the Structural Control System
1 2
1 11 12
2 21
1x k Ax k B w k B u k
z k C x k D w k D u k
y k C x k D w k
(3)
where T 1
1 2wn
w w w
contains excitation w11 1wn
and sensor noise w22 1wn
,
where nw = nw1 + nw2; 1yn
y
contains the time-delayed and noisy sensor signals;
1unu
is the same control force vector as in Eq.(1). The open-loop system state
vector, 1OLnx
, contains structural system state vector,
2 1n
Sx , and time-delay
system state vector, 1TDn
TDx . For the lumped mass shear-frame model with n stories,
iq and iq denote relative displacement and relative velocity, respectively (with respect to
the ground), of the i-th floor (i = 1,…, n). To facilitate decentralized feedback
formulation, structural state vector Sx is organized by grouping relative displacement and
velocity at each floor:
T
1 1 2 2 ...S n nx q q q q q q (4)
The matrices A, B1, B2 in Eq. (3) are the state transition, the excitation influence,
and the control influence matrices. Vector 1znz is the open loop system response that

the system aims to control, and 1yn
y
is the sensor measurement with time delay and
noise. To complete a feedback loop, vector y also serves as the input to the controller
system to be designed, which is described as:
1G G G G
G G G
x k A x k B y k
u k C x k D y k
(5)
where xG1Gn
is the controller state vector; AG, BG, CG, DG are constant matrices of the
LTI dynamic controller and are to be determined through an optimal control design.
DECENTRALIZED CONTROLLER DESIGN IN DISCRETE TIME THROUGH
DOUBLE HOMOTOPY APPROACH
Decentralized Controller Design
For decentralized controller design, the decentralization is represented through
block-diagonal patterns in the controller matrices:
1 2
1 2
1 2
1 2
diag , ,
diag , ,
diag , ,
diag , ,
N
N
N
N
G G G G
G G G G
G G G G
G G G G
A A A A
B B B B
C C C C
D D D D
(6)
With the block-diagonal patterns, the controller system in Eq. (5) is equivalent to
multiple sub-controllers that are independent from each other. Every sub-controller
needs only part of sensor measurement data as input and determines only part of the
control forces as output:
1 1 1 1
1 1 1
1
1 1
1
G G G G
G G G
x k A x k B y k
u k C x k D y k
…,
1i i i i
i i i
G G G G i
i G G G i
x k A x k B y k
u k C x k D y k
…,
1N N N N
N N N
G G G G N
N G G G N
x k A x k B y k
u k C x k D y k
(7)
where , , ,i i i iG G G GA B C D are matrices of the i-th sub-controller, i=1…N); yi is the sensor
measurement data required by the i-th sub-controller; ui is the control force determined

by the i-th sub-controller. As a result, the overall sensor measurement and control force
vectors are partitioned by sub-controllers:
T
1 i Ny y y y
(8a)
T
1 i Nu u u u
(8b)
For convenience in later derivation, the following notations should be defined first
based on parametric matrices of the open-loop system in Eq.(3):
1 2
1 2
1 11 12 1 11 12
2 21
2 21
0 0
0 0 0 0
0 0
0 0
0
G
G
n
n
A B B
IA B B
C D D C D D
C D I
C D
(9)
where nG is the order of decentralized controller. Combining the open-loop system and
the controller system in Eq. (5), the closed-loop system is formulated as:
1CL CL CL CL
CL CL CL
x k A x k B w k
z k C x k D w k
(10a)
2 2CLA A B GC
(10b)
1 2 21CLB B B GD
(10c)
1 12 2CLC C D GC
(10d)
11 12 21CLD D D GD
(10e)
where CLx is the state vector of the closed-loop system; G is the overall controller matrix
that contains all four parametric matrices in the controller system:
G G
G G
A BG
C D
(11)
An ∞ controller design aims to determine a proper controller matrix G so that ∞
norm of the closed-loop system is minimized. As a result, dynamic response of the
structural system is reduced. According to bounded real lemma in discrete time, an ∞
controller can be designed to make the closed-loop system stable and its ∞ norm smaller
than a given scalar γ, if and only if, there exists a symmetric positive definite matrix P >
0 such that the following matrix inequality holds:

T
T
0
* 00
* *
* * *
CL CL
CL
CL
P PA PB
P C
I D
I
(12)
where denotes the terms induced by symmetry. Substituting Eq.(10b) - (10e) into
Eq.(12), the matrix inequality now contains the controller matrix G and other constant
parametric matrices defined in Eq. (9):
2 2 1 2 21
T
1 12 2
T
11 12 21
0
* 00
* *
* * *
P P A B GC P B B GD
P C D GC
I D D GD
I
(13)
Linear Matrix Inequality and Bilinear Matrix Inequality
A linear matrix inequality (LMI) has the form as the following [19]:
0
1
0m
i i
i
F x F x F
(14)
where mx is the vector variable and the symmetric matrices T n n
i iF F , i =
0,…,m, are given. The inequality symbol in Eq.(14) means that F(x) is positive definite.
An important property of LMI is that the set | 0x F x is convex, which can serve as
constraint of a convex optimization problem. On the other hand, the bilinear matrix
inequality (BMI) is of the form:
0
1 1 1 1
, 0m n m n
i i j j i j ij
i j i j
F x y F x F y G x y H
(15)
where Gj and Hij are symmetric matrices, and mx and ny are vector variables. A
BMI is an LMI in x for fixed y, or an LMI in y for fixed x. However, the BMI constraint
doesn’t provide a convex set on x and y simultaneously.
Double Homotopy Approach
Eq. (13) has terms of matrix product that involves both unknown variables P and G,
which results in a bilinear matrix inequality (BMI). When there is no special pattern
requirement on G, such as in a traditional centralized controller design, the BMI problem
can be solved by projection lemma [18]. However, with a block-diagonal pattern
constraint to the matrix variable G, as required by a decentralized design, the problem

becomes NP-hard. There is no general off-the-shelf numerical package or algorithm for
such a non-convex decentralized control problem. For example, algorithm in the
PENNON package is modified for finding local minima or stationary points in a
nonconvex problem, but the idea is found to be not yet mature and needs further tuning
[20]. More recently, Mehendale and Grigoriadis [21] proposed a heuristic double
homotopy algorithm to solve the decentralized ∞ controller in continuous time domain.
In this paper, the double homotopy concept is adopted to design a decentralized ∞
controller in discrete time domain.
To obtain a decentralized controller through numerical iteration, the double
homotopy algorithm approximates BMI to easily solvable LMIs, and then gradually
changes the diagonal-block entries of a centralized controller. At the same time, the off-
diagonal-block entries are transformed to zero along the homotopy steps. At the first step
(step number k = 0), the initial G and P are set to the same as centralized controller
matrix GC and co-existing PC:
0 , ,C C diag C offG G G G (16a)
0 CP P
(16b)
where GC,diag represents the block diagonal part of GC that has the same sparsity pattern
as the desired decentralized controller matrix; GC,off denotes the off-diagonal blocks such
that Eq. (16a) is satisfied. At the k-th homotopy step (k = 1, 2, …, K), Pk and Gk are
described as the following:
1 K (17a)
1 ,k k C off kG G G G (17b)
1k k kP P P
(17c)
where K is the total number of steps; the increment kG has the same structure as GC,diag;
the increment kP is symmetric. When the step k changes from 1 to K, the off-diagonal
block entries of the controller Gk are gradually transformed to zero, and the diagonal
block entries are changed by the increments kG . When kG and kP are small enough,
their products can be neglected. Therefore, the bilinear entries in Eq. (13) can be
approximately linearized as the following:
2 2
1 2 -1 , 2
-1 2 -1 , 2 -1 2 2 2 -1 , 2 2 2
1 1 2 2
k k
k k k k C off
k k C off k k k k C off k k
k k k k
P A B G C
P P A B G G G C
P A B G G C P B G C P A B G G C P B G C
P A P B G C P A
(18a)

1 2 21
-1 1 2 -1 , 21
-1 1 2 -1 , 21 -1 2 21 1 2 -1 , 21 2 21
1 1 2 21
k k
k k k k C off
k k C off k k k k C off k k
k k k k
P B B G D
P P B B G G G D
P B B G G D P B G D P B B G G D P B G D
P B P B G D P B
(18b)
As a result, the BMI problem is converted to an LMI problem where there is no
matrix product simultaneously involving kG and
kP . Substituting Gk in Eq.(17b) into
other entries in Eq.(13), the following equation can be derived:
1 12 2 1 12 -1 , 2
1 12 -1 , 2 12 2
12 2
k k k C off
k C off k
k
C D G C C D G G G C
C D G G C D G C
C D G C
(19a)
11 12 21 11 12 -1 , 21
11 12 -1 , 21 12 21
12 21
k k k C off
k C off k
k
D D G D D D G G G D
D D G G D D G D
D D G D
(19b)
where
2 -1 , 2k C offA A B G G C (20a)
1 2 -1 , 21k C offB B B G G D
(20b)
1 12 -1 , 2k C offC C D G G C
(20c)
11 12 -1 , 21k C offD D D G G D
(20d)
Finally, the LMI after linearizing BMI in Eq. (13) can be re-written with variables
kG and kP :
1 1 1 2 2 1 1 2 21
1 12 2
12 21
,
0
* 00
* *
* * *
k k
k k k k k k k k k k
T
k k k
T
k
V G P
P P P A P B G C P A P B P B G D P B
P P C D G C
I D D G D
I
(21)
The double homotopy process for searching a decentralized controller is described
as below:
Step 1: Compute a centralized ∞ controller GC, as well as co-existing PC and γC, and
then separate GC,diag and GC,off according to Eq. (16a).
Step 2: Set the upper limit Kmax for K, e.g. 213
, and γmax for γ, e.g. 28γC. Initialize K, e.g.
26, k←1, P0←PC, G0 ←GC, γ0← γC.

Step 3: At step k, calculate the symmetric increment variable matrix kP , the structured
increment variable matrixkG , and scale variable γk in the following LMI problem.
Minimize γk
Subject to ,k kV G P <0, 1 0k kP P , 1k kP P , k CG G ,
1k k .
(22)
Step 4: Set Gk← 1 ,k C off kG G G and Pk← 1k kP P . Check that the triplet (Gk, Pk, γk)
satisfies the inequality Eq. (13). If they do, recalculate Pk by fixing Gk and γk in Eq.
(13) to improve the condition number of Pk, and then go to Step 5. If not, set K←2K.
If K<Kmax, repeat Step 3 with the initial value P0, G0, γ0; otherwise set γ0←2γC under
the constraint γ0 ≤ γmax, and go to Step 3 with the initial value P0, G0, K, k. If γ0
grows larger than the pre-set limit γmax, it is concluded that the algorithm does not
converge.
Step 5: If k = K, the desired decentralized ∞ controller is given by Gk. If not, set k←k+1,
and repeat Step 3 with the updated Pk, Gk, and γk.
It should be noted that this double homotopy method is heuristic and cannot
guarantee convergence. Even if the process converges, the solution may still be a local
optimum due to the non-convex nature of the decentralized control problem. On the
other hand, non-convergence does not imply the non-existence of a decentralized ∞
controller.
NUMERICAL EXAMPLE
This section studies performance comparison between the proposed decentralized
controller design and centralized design, using a six-story model structure. The six-story
structure is shown in Figure 2(a). Lumped mass parameters are provided in Figure 2(b)
and other parameters are described in [12]. Three ideal actuators are installed on the 1st,
3rd
and 5th
floor, respectively. Through a V-brace, every actuator can apply control force
between two neighboring floors.
(a) deployment of three
actuators
(b) lumped masses
of the structure
(c) communication architecture
for different DC
Figure 2. A six-story model structure centralization (DC)

The measurement output m[k] are denoted as the inter-story drifts described in Eq.
(23a). Sensor noise can influence the measurement results, and worsen the control
performance. In this simulation, the sensor noise level is set as 0.1% of the sensor signal.
Considering the time delay and sensor noise, the feedback signal y[k] is formed as in Eq.
(3). Eq. (23b) defines the response output z[k] as the combination of inter-story drifts and
control force with different weightings .
T
1 2 1 6 5m k q k q k q k q k q k (23a)
T
4 9
1 2 1 6 5 1 2 310 , 10z k q k q k q k q k q k u u u
(23b)
As shown in Figure 2(c), four different feedback cases are studied, representing
different degrees of centralization (DC). In each DC, there exist one or more
communication subnets (as denoted by channels Ch1, Ch2, etc). A larger number of DC
represents a higher level of centralization. For example, DC means each subnet or
channel covers only one story and there are three subnets totally. Each subnet in DC
covers two stories and a total of three subnets exist, without overlapping between two
channels. For case DC , each subnet covers four stories and the two communication
channels overlap at 3rd
and 4th
stories. For DC , only one subnet exists and covers all six
stories, representing centralized control.
In practical implementation, the sampling period for different control architecture is
determined by the network communication time and computation time of the embedded
controllers. For a particular control system, values of the time delays can be measured
according to sensor and controller deployment. As commonly encountered, the time
delay in this study equals one sampling time step, i.e. the time delay equals one sampling
period. Due to the least amount of communication and computation required, case
DC entails shortest sampling period and least time delay. A larger number of DC
usually indicates more time is required for communication and computation. Case DC
thus has the longest sampling period and time delay. Using a prototype wireless
feedback control system as an example [17], the sampling period and time delay from
DC to DC adopted in this simulation are displayed in Table 1.
Table 1. Feedback time delay and sampling period for four different DCs (unit: ms)
DC DC DC DC
15 20 25 52
The controllers for different DC cases are designed using the proposed double
homotopy method for discrete time domain. The 1940 El Centro NS earthquake record is
adopted as the ground excitation. The peak ground acceleration is scaled to 1 m/s2.
Classical Newmark integration is performed to compute time histories of structural
response during the earthquake. For all cases with control and without control, the
structure response is evaluated by peak inter-story drifts shown in Figure 3(a).
Theoretically, the system should still be stable for all cases, even with ideal actuators that
are capable of producing any desired forces. However, it is found that DC and DC

demonstrate unstable structural response in the Newmark integration, which means that
the marginally low stability of these two cases is easily disturbed in the numerical
integration. Figure 3(b) shows that due to instability, DC and DC have prohibitively
high requirements on actuator force. The low stability of DC is likely because not
enough measurement feedback is available, even though this case has the fastest response,
i.e. least time delay. Meanwhile, the low stability of DC is due to its long time delay.
For the three stable cases (DC , DC , and without control), Figure 3(c) and
Figure 3(d) illustrate peaks and RMS (root-mean-square) values of inter-story drifts. At
the 2nd
story, the structure without control has highest peak inter-story drift of 8×10-3
m
and highest RMS inter-story drift of nearly 2.5×10-3
m. Both DC and DC reduce
peak and RMS of inter-story drifts, particularly for the 2nd
story. In this example, DC
performance is better than DC , likely because DC has more measurement
information available while not much longer time delay.
For DC and DC , the peak force and RMS force are shown in Figure 3(e) and
Figure 3(f). Both cases required reasonable actuator capacities that can be generated in
practice. Overall, it is observed that with reasonable time delay, the more measurement
data available for each sub-controller, the better performance can be achieved in
decentralized control.
(a) peak inter-story drifts for all cases
(b) peak actuator forces for all control
cases
(c) peak inter-story drifts for DC ,
DC , and no control
(d) RMS inter-story drifts for DC and
DC

(e) peak actuator forces for DC and
DC
(f) RMS actuator forces for DC and
DC
Figure 3. Simulation results for decentralized and centralized control with ideal actuators:
SHAKE TABLE EXPERIMENTS
To further study the decentralized ∞ structural control, shake table experiments on
a two-story frame with two active mass dampers (AMD) are conducted. The two-story
frame model is obtained through Lagrange’s method with the setup parameters.
Decentralized ∞ controllers are designed with time delay through the double homotopy
approach, and tested in the shake table experiments.
(a) photo of experimental
setup
Mf1
Mf2
Mc
Mc
Computer
Controller
VoltPAQ
DAQ
UPM
Accelerometer 1
Accelerometer 2
xc2
xc1
1fx
2fx
,g gx xShake Table
Electrical
signal for shake
table motor
Driving shake
table motor
Floor accelerations, shake table
acceleration and position feedback
Electrical
signal for AMD
motors
Fc2
Fc1
Driving cart
motor
Cart1
Cart2
(b) diagram of experimental
setup
DC
Ch1
Ch2
Ch1
DC
xc1
xc2
xc1
xc2
2fx
1fx 1fx
2fx
(c) communication
architecture for
different DC
Figure 4. Two-story frame with two AMDs

Experimental Setup
The experimental setup is made by Quanser Inc. The setup consists of a shake table,
a Universal Power Module (UPM), a two-story frame with two AMDs, a VoltPAQ power
amplifier for the AMDs, a data-acquisition (DAQ) card, and a PC running the QUARC
control software. The QUARC software is integrated with MATLAB Simulink, and can
be called inside a Simulink window.
As illustrated in Figure 4, according to input earthquake record, the computer
calculates the current to drive the shake table, and then transmits the signals through
DAQ to UPM. The DAQ is interface with other devices and collects data at 500Hz
sampling frequency. UPM amplifies the current signals, and then drives the electric
motor of the shake table. At each sampling step, the shake table sends its acceleration
(detected by an accelerometer) and position (detected by an encoder) data back to DAQ
through UPM. At the same time, the shake table movement excites the 2-story frame to
vibrate. Each floor of the structure is equipped with a capacitive single-chip
accelerometer with full scale range of 5 g and sensitivity of (9.81 m/s2)/V. The AMD
cart position on each floor is measured by an encoder with a high resolution of 4096
counts per revolution. The floor acceleration signals 1fx and 2fx are sent to DAQ
through UPM. The position signals of the moving carts, xc1 and xc2, are detected by
AMD encoders and also collected by DAQ. Computer makes optimal control decision
according to DAQ sampling data, and sends required voltage to VoltPAQ. VoltPAQ then
drives the cart motors of AMDs to generate control force Fc1 and Fc2. Through this
feedback control loop, the structural response can be suppressed by the control forces.
Modeling and Control Strategies
Following the experimental setup, a dynamic model of the two-story frame with
two-AMDs is obtained by Lagrange’s method. The dynamic model can be transformed
following Eq. (1). The vector q in Eq. (2) can be described as:
TT
1 2 3 4 1 1 1 2 2 2c f g f g c f g f gq q q q q x x x x x x x x x x (24)
As shown in Figure 4, xc1 (or xc2) denotes the 1st (or 2
nd) AMD cart displacement with
respect to the 1st floor (or 2
nd floor); xf1 (or xf2) denotes the 1
st (or 2
nd) floor absolute
displacement; xg is the ground displacement. As a result, the four entries in Eq. (24) are
the relative displacements of 1st AMD cart, 1
st floor, 2
nd AMD cart and 2
nd floor (with
respect to ground). The sensor measurement consists of two floor accelerations and two
AMD cart positions, as defined in Eq. (25a). The structural response output contains the
inter-story drift and weighted voltages for driving cart motors, as shown in Eq. (25b).
T
1 1 2 2c f c fm k x x x x (25a)
T
2
1 2 1 1 2, 4ef g f f m mz k x x x x V V
(25b)
where Vmi is the voltage driving the i-th cart motor (i = 1, 2). As detailed in Quanser user
manual, higher voltage Vmi for the cart motor generates larger force Fci. Therefore, the
control signal can be expressed by the cart voltage as u = [Vm1, Vm2]T, instead of directly
as the AMD forces.
All the sensors, including accelerometers and encoders, are connected with the
DAQ card by cables. Because communication network is cabled for this small test
structure, and all the controller computation is performed by a computer, the time delay is
much shorter than using wireless communication and embedded computing by a
microcontroller, as in [17]. In order to emulate longer time delay (which is more typical
in practice with large structures) in the experiments, a rate transition block and a unit
delay block are added into Simulink model as shown in Figure 5.
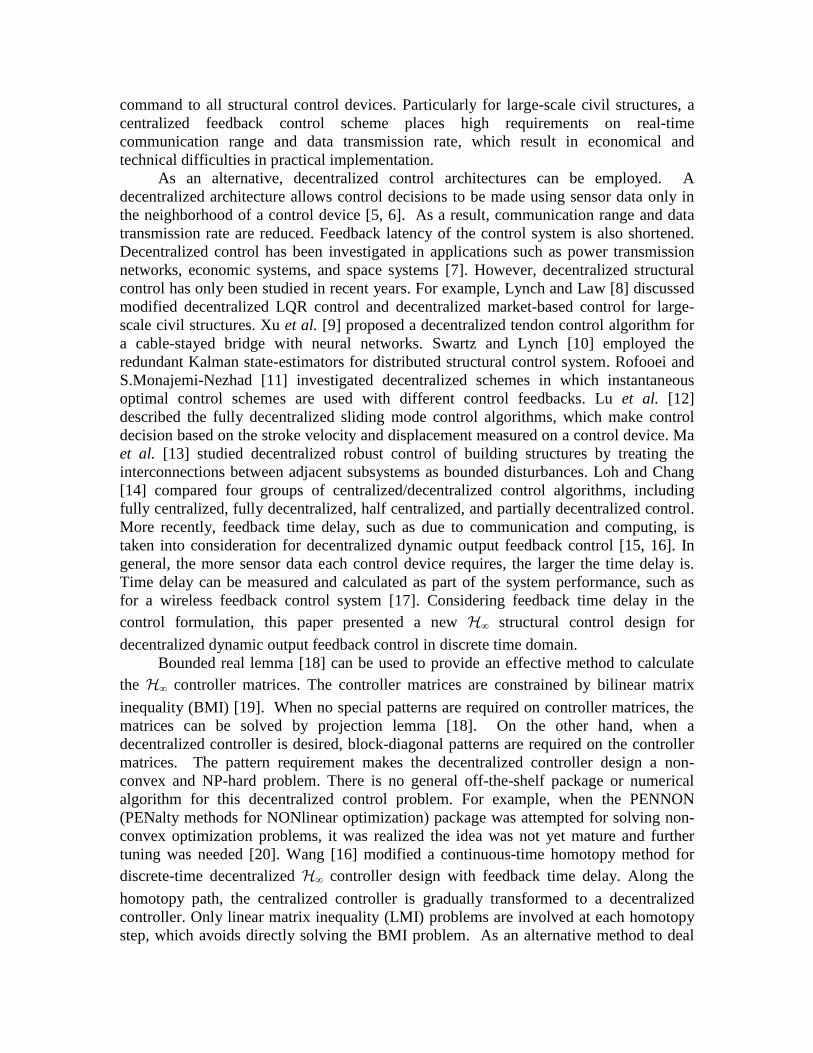
Figure 5. Simulink block diagram for sampling period changing and delay
As illustrated in Figure 5, the measurement data is sampled by the sensors at 2ms
sampling period and is input into the high-to-low rate transition block, which can increase
the sampling period from 2ms to 26ms. The unit delay block can delay by one sampling
period before transferring measurement data to controller. The low-to-high rate transition
block can reduce the sampling period from 26ms back to 2ms, so that the sampling period
is uniform with the entire system. As a result, the control force calculated by controllers
is held at the same value as zero-order hold during every 26ms. With the Simulink
modules, the experiment with time-delayed control can be conducted.
Through double homotopy method, a decentralized ∞ controller for case DC in
Figure 4(c) is designed. DC is the centralized control case. El-Centro earthquake
(Imperial Valley, Station 952, 10/15/79) record is employed with a scaled peak
acceleration 0.519g (i.e. 5.09 m/s2). Different time delays for case DC and DC is
assumed to be 2ms and 26ms, respectively. Besides the two feedback control cases,
another passive TMD (tuned mass damper) case is tested, where the two mass dampers
are used to suppress structural response with zero input voltage Vm1 and Vm2 to AMD
motors. The frame performances are compared between DC , DC , and TMD control
cases in Figure 6.
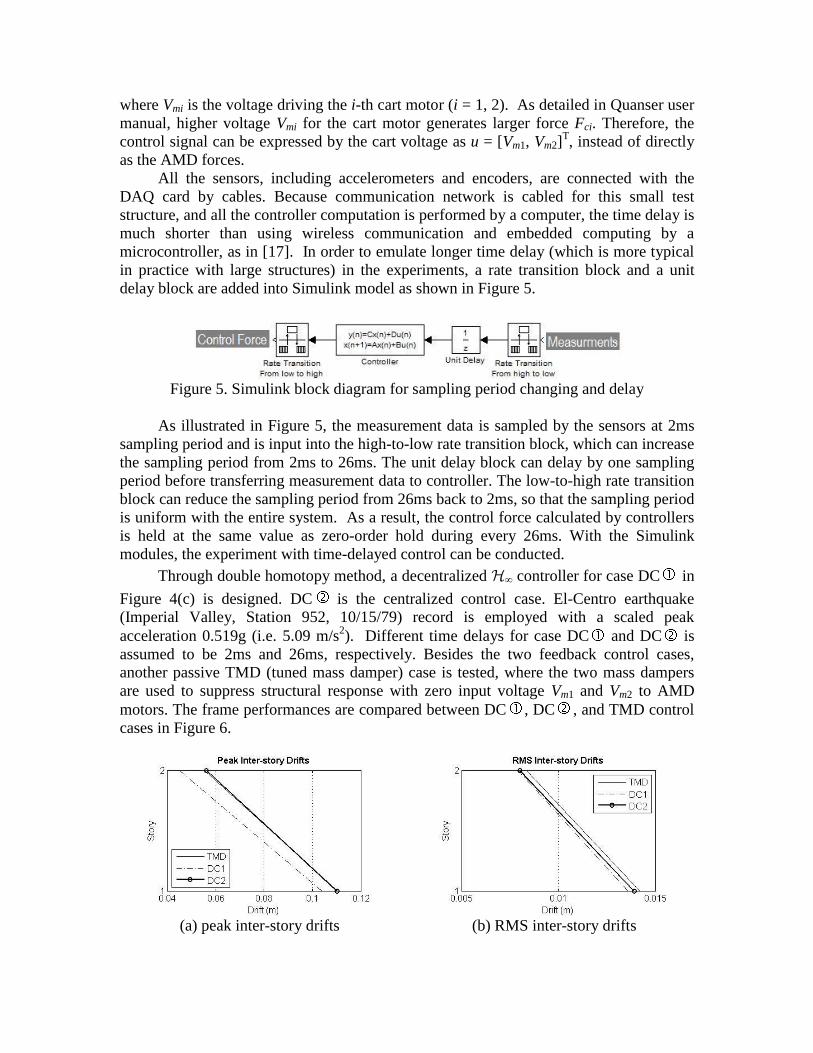
(a) peak inter-story drifts
(b) RMS inter-story drifts
(c) peak cart positions
(d) RMS cart positions
Figure 6. Experimental results for TMD, decentralized, and centralized control
In Figure 6(a) and (b), the peak inter-story drifts in 1st story and 2
nd story for DC
are 1 cm less than TMD and DC . DC is the centralized control and does not perform
better than passive TMD, due to the 26ms time delay. Cart position means the cart
displacement with respect to the corresponding floor. The larger the cart displacement is,
the larger the voltage input to cart motor is, which also means a higher requirement on
control force. As shown in Figure 6(c) and (d), cart movements are the smallest in the
passive TMD case without voltage control. DC and DC show larger cart
displacements than TMD, and the cart displacements of DC are much larger than
DC . This means due to the longer time delay, centralized DC uses higher voltage
and entails more control effort, but cannot suppress the response as well as decentralized
DC . Therefore, benefiting from less time delay required by a decentralized feedback
system, decentralized control can perform better than the centralized scheme which
usually has longer latency.
SUMMARY AND CONCLUSION
This paper presents a decentralized ∞ controller design in discrete time domain.
Considering time delay, the decentralized ∞ controller minimizes the ∞ norm of the
closed-loop system. According to the bounded real lemma, the controller design requires
solving a bilinear matrix inequality (BMI) problem, which is NP-hard and cannot be
solved using projection lemma due to the block-diagonal pattern constraint to controllers.
A double homotopy method is employed to approximate this BMI problem to a series of
linear matrix inequality (LMI) problems, which gradually deforms the centralized
controller to a decentralized controller.
The control performance of the decentralized ∞ controller is first validated
through a six-story numerical example. It shows that for cases with acceptable time delay
(e.g. DC and DC ), the more measurement data is available for decentralized sub-
controllers, the better the control performance is. When the time delay is too long (DC )
or not enough measurement data (DC ) is available for the sub-controllers, the feedback
system has poor stability. This conclusion is also corroborated by shake table
experiments using a two-story frame with two AMDs. Longer time delay can worsen the
performance of the controller. Due to less time delay, decentralized controller DC
achieves better performance than the centralized controller DC in experiments.

Because the proposed double homotopy method is heuristic, significant amount of future
studies are needed to compare its performance with other existing methods for
decentralized control design.
ACKNOWLEDGEMENT
The authors are grateful for the support National Natural Science Foundation of
China (grant number 51121005 and 50708016) and National Earthquake Special
Founding of China (grant number 200808074), and also appreciate the experiment device
supported by Structural Health Monitoring and Control Lab in Faculty of Infrastructure
Engineering, Dalian University of Technology. Dr. Yang Wang is supported by the U.S.
National Science Foundation CAREER Award CMMI-1150700. Any opinions, findings,
and conclusions or recommendations expressed in this publication are those of the
authors and do not necessarily reflect the view of the sponsors. In addition, The authors
would like to thank Prof. Chin-Hsiung Loh and Dr. Kung-Chun Lu of the National
Taiwan University, as well as Dr. Pei-Yang Lin of NCREE, for generously providing the
numerical model of the six-story example structure.
REFERENCES
1. Adeli H. Wavelet-Hybrid Feedback-Least Mean Square Algorithm for Robust Control of
Structures. Journal of Structural Engineering 2004; 130(1):128-137.
2. Kim Y., Hurlebaus S.,Langari R. Model-Based Multi-input, Multi-output Supervisory Semi-
active Nonlinear Fuzzy Controller. Computer-Aided Civil and Infrastructure Engineering
2010; 25(5):387-393.
3. Lin C. C., Chen C. L.,Wang J. F. Vibration Control of Structures with Initially Accelerated
Passive Tuned Mass Dampers under Near-Fault Earthquake Excitation. Computer-Aided Civil
and Infrastructure Engineering 2010; 25(1):69-75.
4. Spencer B. F., Jr.,Nagarajaiah S. State of the Art of Structural Control. Journal of Structural
Engineering 2003; 129(7):845-856.
5. Sandell N., Jr., Varaiya P., Athans M.,Safonov M. Survey of decentralized control methods for
large scale systems. Automatic Control, IEEE Transactions on 1978; 23(2):108-128.
6. Siljak D. D. Decentralized Control of Complex Systems. Academic Press: Boston, 1991.
7. Siljak D. D. Decentralizedcontrol and computations: status and prospects. Annual Reviews in
Control 1996; 20:131-141.
8. Lynch J. P.,Law K. H. Decentralized control techniques for large scale civil structural systems.
Proceedings of the 20th International Modal Analysis Conference, Los Angeles, CA, 2002.
9. Xu B., Wu Z. S.,Yokoyama K. Neural networks for decentralized control of cable-stayed
bridge. Journal of Bridge Engineering 2003; 8(4):229-236.
10. Swartz R. A.,Lynch J. P. Redundant Kalman Estimation for a Distributed Wireless Structural
Control System. Proceedings of the US-Korea Workshop on Smart Structures Technology for
Steel Structures, Seoul, Korea, 2006.
11. Rofooei F. R.,Monajemi-Nezhad S. Decentralized control of tall buildings. The Structural
Design of Tall and Special Buildings 2006; 15(2):153-170.
12. Lu K. C., Loh C. H., Yang J. N.,Lin P. Y. Decentralized sliding mode control of a building
using MR dampers. Smart Materials and Structures 2008; 17(5):055006.
13. Ma T. W., Xu N. S.,Tang Y. Decentralized robust control of building structures under seismic
excitations. Earthquake Engineering & Structural Dynamics 2008; 37(1):121-140.

14. Loh C. H.,Chang C. M. Application of centralized and decentralized control to building
structure: analytical study. Journal of Engineering Mechanics 2008; 134(11):970-982.
15. Wang Y., Law K. H.,Lall S. Time-delayed decentralized H∞ controller design for civil
structures: a homotopy method through linear matrix inequalities. Proceedings of the 2009
American Control Conference (ACC 2009), St. Louis, MO, USA, 2009.
16. Wang Y. Time-delayed dynamic output feedback H∞ controller design for civil structures: a
decentralized approach through homotopic transformation. Structural Control and Health
Monitoring 2011; 18(2):121-139.
17. Wang Y., Swartz R. A., Lynch J. P., Law K. H., Lu K.-C.,Loh C.-H. Decentralized civil
structural control using real-time wireless sensing and embedded computing. Smart Structures
and Systems 2007; 3(3):321-340.
18. Gahinet P.,Apkarian P. A linear matrix inequality approach to H∞ control. International
Journal of Robust and Nonlinear Control 1994; 4(4):421-448.
19. VanAntwerp J. G.,Braatz R. D. A tutorial on linear and bilinear matrix inequalities. Journal of
Process Control 2000; 10(4):363-385.
20. Kocvara M.,Stingl M. PENNON - A Code for Convex Nonlinear and Semidenite
Programming. Optimization Methods and Software 2003; 18(3):317-333.
21. Mehendale C. S.,Grigoriadis K. M. A double homotopy method for decentralised control
design. International Journal of Control 2008; 81(10):1600 - 1608.


















![GALOIS EQUIVARIANCE AND STABLE MOTIVIC HOMOTOPY …Hopkins [8], stable equivariant homotopy theory controls the chromatic decomposition of stable homotopy theory. It is also essential](https://img.pdfslide.us/doc/110x75/5fac18a4175d14214a0dffa3/galois-equivariance-and-stable-motivic-homotopy-hopkins-8-stable-equivariant.jpg)