Embed Size (px)
Citation preview
A distributed simulator for power system analysis using a hypercube computer Yoshiakira Akimoto, Hideo Tanaka and Hiromi Ogi Computer & Communication Research Center, Tokyo Electric Power Company. 1-4-10, Irifune, Chuo-ku, Tokyo, 104 Japan
Hisao Taoka and Toshiaki Sakaguchi Industrial Systems Laboratory, Mitsubishi Corporation, 8-1-1, Tsukaguchi Honmachi, Amagasaki. Hyogo, 661 Japan
Electric
The use of distributed systems is expected to realize characteristics of flexibility, high modularity, ease of development, high-speed processing and cost performance in several fields. Distributed systems on parallel or distributed computers are studied in order to obtain these characteristics. We have developed a distributed simulation method for the extension or maintenance of power systems in the simulator. In this paper, we describe the distribution methods of power system simulation. First, we propose a distributed algorithm for solving the network equations of power system simulation. Second, we describe a way qf mapping tasks, which are to be separated for distributed simulation, to a hypercube computer, NCube/lO. In the hypercube computer, each bus and control circuits of a generator in a power system are assigned to individual processors. Finally, we present the results of installing and evaluating the proposed algorithm and distributed simula- tion techniques on a hypercube computer.
Keywords." power system analysis, simulator, hypercube computer, distributed simulation
I. Introduction
With the advance of information technology, several kinds of systems will become large and complex. They will be difficult to maintain, and even to build. We believe that the key technology to solving this problem is distribution and autonomy. In order to make it easy to build, extend and maintain a future system, it should be controlled or operated by itself and coordinate with
other systems, adapting itself autonomously to circum- stances analogous to a biological system.
Power systems are large and complex systems. Simula- tion is a very important part of the planning and operation of power systems, and is widely used l. However, the simulation of large power systems requires considerable time and cost, even if a large computer is used. It takes tens of minutes to simulate 10 seconds of dynamics of large systems. Distributed systems on parallel or distributed computers are studied to reduce the time and cost of power system simulation. Such systems are used to obtain characteristics of high-speed processing, cost performance, flexibility, high modularity and ease of development 2-4.
We have developed a distributed simulation method for power systems that can be applied to one type of distributed computer, a hypercube computer. One goal of this research is to develop a way in which to get modularity in the simulator, allowing new components for extension or maintenance of a power system to be easily attached or detached. Another goal is to achieve high-speed simulation for training, security monitoring and testing some equipment of power systems.
Power system simulation is expressed as a set of differential equations, which describes the dynamic behaviour of generators and their control circuits, and algebraic equations, which describes the steady-state behaviour of the network s'6. Differential equations are easily distributed by separating each component such as generators and control circuits. The algebraic equations describing the state of the power system network should be solved simultaneously. It is considered difficult to solve such equations in a distributed way. Here, we present a distributed method to solve the network equations. We
also describe a distributed algorithm for power system simulation.
Another problem is to keep consistency of data. Differential equations and network equations are calcu- lated step by step in turn during the simulation. The results are transferred at the end of the calculation of each step. The width of each time step is tens of milliseconds, though the time length of a simulation is tens of seconds. This means that the data are very frequently transferred among processors in a short period of time. It is very important to keep data consistency in the simulation without disturbance of time and conflict of data. We add time stamps to all sets of data to maintain consistency of data.
We have installed and evaluated these methods in the hypercube computer, NCube/10. In the hypercube com- puter, each bus and control circuits of generators in a power system are assigned to individual processors. The results are also described in this paper.
II. Hypercube c o m p u t e r In a distributed system, there are two types of architecture that connect processors. One is the common bus- type architecture, and the other is the network-type architecture.
Common bus-type architecture shares a memory and a bus. It can operate like a time-sharing system, so it is easily acceptable to users of conventional computers. It is mainly suited to applications in which each processor requires operation of the same data, as in transaction processing.
In network-type systems, each processor has its own memory and communicates with exclusive lines to other processors. It is suited to applications in which each processor operates with loosely coupled relations or a low communication load, such as the simulation of large systems like power networks. The hypercube computer is one example of the network-type architecture, which includes many types of network such as loop, mesh and tree topologies.
In recent years, this architecture has become attractive for researchers whose subjects include parallel or distri- buted processing in several fields 2.
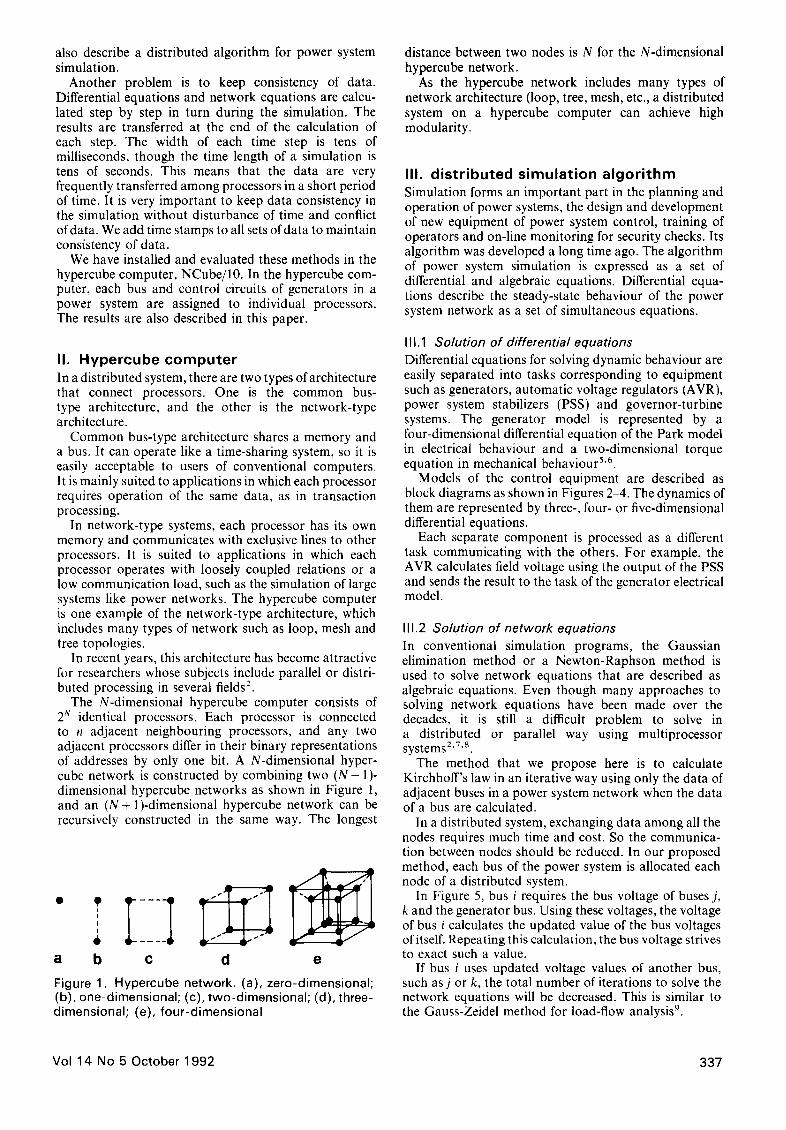
The N-dimensional hypercube computer consists of 2 N identical processors. Each processor is connected to n adjacent neighbouring processors, and any two adjacent processors differ in their binary representations of addresses by only one bit. A N-dimensional hyper- cube network is constructed by combining two (N-1)- dimensional hypercube networks as shown in Figure 1, and an (N + 1)-dimensional hypercube network can be recursively constructed in the same way. The longest
a b c d e
Figure 1. Hypercube network. (a), zero-dimensional; (b), one-dimensional; (c), two-dimensional; (d), three- dimensional; (e), four-dimensional
distance between two nodes is N for the N-dimensional hypercube network.
As the hypercube network includes many types of network architecture (loop, tree, mesh, etc., a distributed system on a hypercube computer can achieve high modularity.
III. d istr ibuted s imulat ion a lgor i thm Simulation forms an important part in the planning and operation of power systems, the design and development of new equipment of power system control, training of operators and on-line monitoring for security checks. Its algorithm was developed a long time ago. The algorithm of power system simulation is expressed as a set of differential and algebraic equations. Differential equa- tions describe the steady-state behaviour of the power system network as a set of simultaneous equations.
II1.1 Solution of differential equations Differential equations for solving dynamic behaviour are easily separated into tasks corresponding to equipment such as generators, automatic voltage regulators (AVR), power system stabilizers (PSS) and governor-turbine systems. The generator model is represented by a four-dimensional differential equation of the Park model in electrical behaviour and a two-dimensional torque equation in mechanical behaviour 5'6.
Models of the control equipment are described as block diagrams as shown in Figures 2-4. The dynamics of them are represented by three-, four- or five-dimensional differential equations.
Each separate component is processed as a different task communicating with the others. For example, the AVR calculates field voltage using the output of the PSS and sends the result to the task of the generator electrical model.
111.2 Solution of network equations In conventional simulation programs, the Gaussian elimination method or a Newton-Raphson method is used to solve network equations that are described as algebraic equations. Even though many approaches to solving network equations have been made over the decades, it is still a difficult problem to solve in a distributed or parallel way using multiprocessor systems 2,7,8.
The method that we propose here is to calculate Kirchhoff's law in an iterative way using only the data of adjacent buses in a power system network when the data of a bus are calculated.
In a distributed system, exchanging data among all the nodes requires much time and cost. So the communica- tion between nodes should be reduced. In our proposed method, each bus of the power system is allocated each node of a distributed system.
In Figure 5, bus i requires the bus voltage of buses j, k and the generator bus. Using these voltages, the voltage of bus i calculates the updated value of the bus voltages of itself. Repeating this calculation, the bus voltage strives to exact such a value.
If bus i uses updated voltage values of another bus, such as j or k, the total number of iterations to solve the network equations will be decreased. This is similar to the Gauss-Zeidel method for load-flow analysis 9.
Vol 14 No 5 October 1992 337
Dead band
5 W
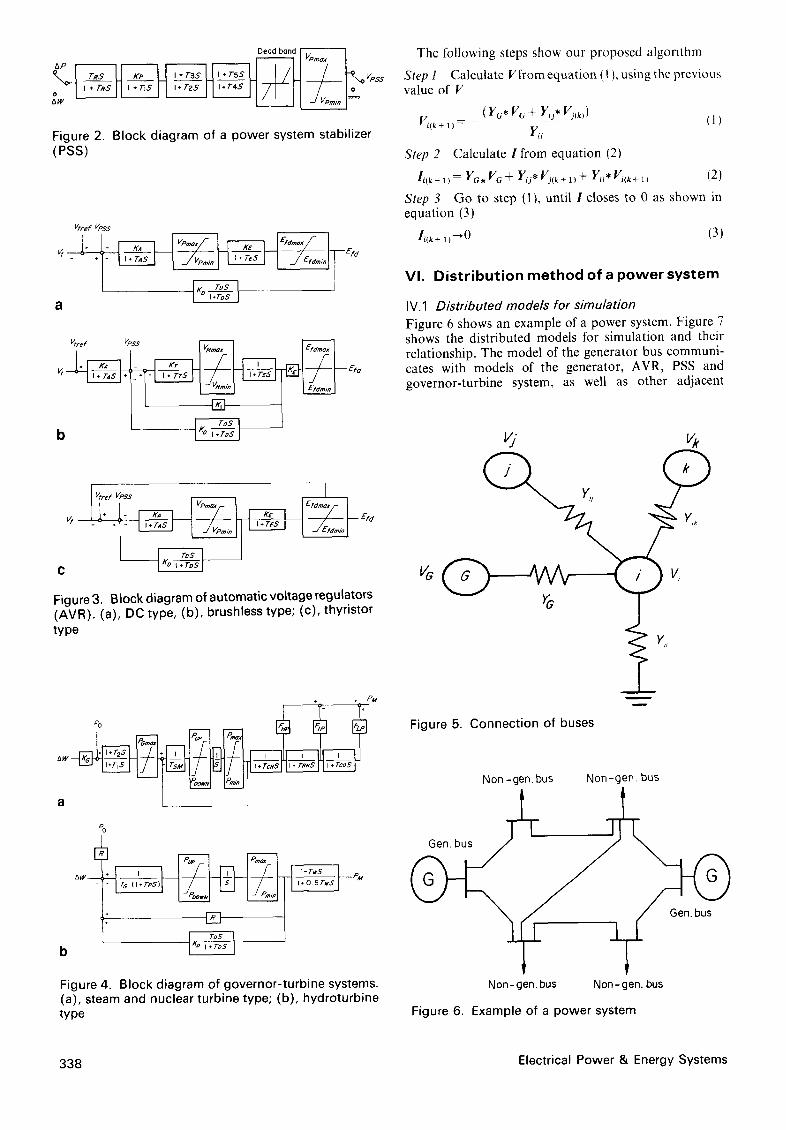
Figure 2. Block diagram of a power system stabilizer (PSS)
Vfref VpSS
a
I vtref Vpss i---;7----.--.....--1 ~ l ~
C
Figure 3. Block diagram of automatic voltage regulators (AVR). (a), DC type, (b), brushless type; (c), thyristor type
. PM +
po
b
F AW__
Figure 4. Block diagram of governor-turbine systems. (a), steam and nuclear turbine type; (b), hydroturbine type
The following steps show our proposed algorithm
Step i Calculate Vfrom equation (1), using the previous value of V
(1%, V~+ Yij* vj(~)) (1) V i ( k + l ) ~ - - - Y.
Step 2 Calculate I from equation (2)
Ii(k + 1 ) : YG* VG ~- Yij* Vj(k + 1) "[- Yii* Vi(k + 1) ( 2 )
Step 3 Go to step (1), until 1 closes to 0 as shown in equation (3)
li(k+ l)--)O (3)
VI. D i s t r i b u t i o n m e t h o d o f a p o w e r s y s t e m
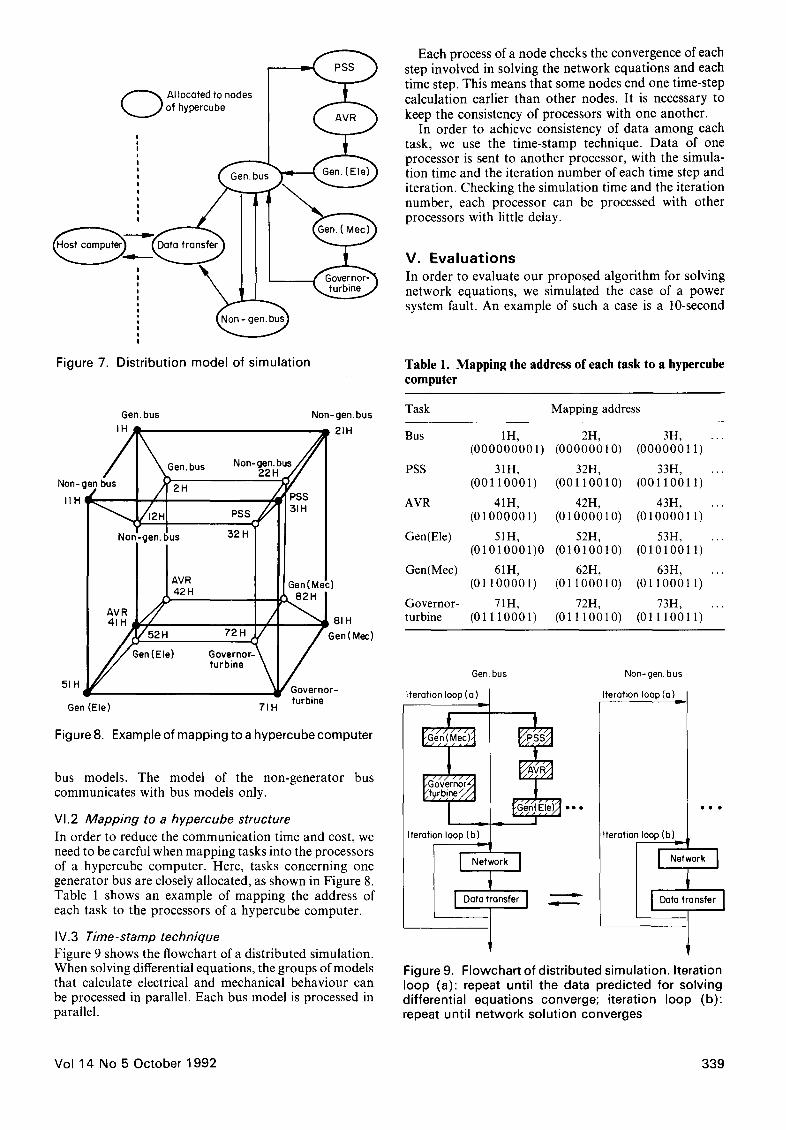
IV.1 Distributed models for simulation Figure 6 shows an example of a power system. Figure 7 shows the distributed models for simulation and their relationship. The model of the generator bus communi- cates with models of the generator, AVR, PSS and governor-turbine system, as well as other adjacent
v,
Figure 5. Connection of buses
Non-gen. bus Non-gen. bus
Non- gen. bus Non - gen. bus
Figure 6. Example of a power system
338 Electrical Power & Energy Systems
O Allocated to nodes of hypercube
Gen.bus
PSS
AVR
Gen. (Ele)
Gen. tronsfe l
Each process of a node checks the convergence of each step involved in solving the network equations and each time step. This means that some nodes end one time-step calculation earlier than other nodes. It is necessary to keep the consistency of processors with one another.
In order to achieve consistency of data among each task, we use the time-stamp technique. Data of one processor is sent to another processor, with the simula- tion time and the iteration number of each time step and iteration. Checking the simulation time and the iteration number, each processor can be processed with other processors with little delay.
V. Evaluations In order to evaluate our proposed algorithm for solving network equations, we simulated the case of a power system fault. An example of such a case is a 10-second
Figure 7. Distribution model of simulation
Non- ( IIH
51H
Gen. bus Non- gen. bus IH , 21H
/ ~Gen.bus N°n- ~ibu / en bus ~ ~ ~ ) / / / I /- 'Pss
Non'- gen. bus 32 H
AVR 42 H
"g.=
Gen (Ele)
72H
turbine
Gen (Ele)
Gen (Me)
/ I / G e n ( M e c )
Governor- turbine 71H
Figure 8. Example of mapping to a hypercube computer
bus models. The model of the non-generator bus communicates with bus models only.
VI.2 Mapping to a hypercube structure In order to reduce the communication time and cost, we need to be careful when mapping tasks into the processors of a hypercube computer. Here, tasks concerning one generator bus are closely allocated, as shown in Figure 8. Table 1 shows an example of mapping the address of each task to the processors of a hypercube computer.
IV.3 Time-stamp technique Figure 9 shows the flowchart of a distributed simulation. When solving differential equations, the groups of models that calculate electrical and mechanical behaviour can be processed in parallel. Each bus model is processed in parallel.
Table 1. Mapping the address of each task to a hypercube computer
Task Mapping address
Bus 1H, 2H, 3H, ... (000000001) (00000010) (0000001t)
PSS 31H, 32H, 33H . . . . (00110001) (00110010) (00i t0011)
AVR 41H, 42H, 43H, ... (01000001) (01000010) (01000011)
Gen(Ele) 51H, 52H, 53H, ... (0101000l)0 (01010010) (01010011)
Gen(Mec) 61H, 62H, 63H . . . . (01100001) (01100010) (0110001 l)
Governor- 71H, 72H, 73H, ... turbine (01110001) (01110010) ( 0 I l l 0 0 11 )
Gen. bus
Iteration loop (a)
l
t/ //~///A
Iteration loop (b)
I "or-or" I {
] Dotatronsfer J
t
I
Non- gen. b us
Iteration loop ( o ) v ,
o o •
, Iteration loop (b)
I Networ" I
I I
Figure 9. Flowchart of distributed simulation. Iteration loop (a): repeat until the data predicted for solving differential equations converge; iteration loop (b): repeat until network solution converges
Vol 14 No 5 October 1992 339
8 5O "5 o
g_ 5O
$ u~
8 2o 5 o
"6 I0
z 0
mist iteration 2nd iteration
D 5rd iteration
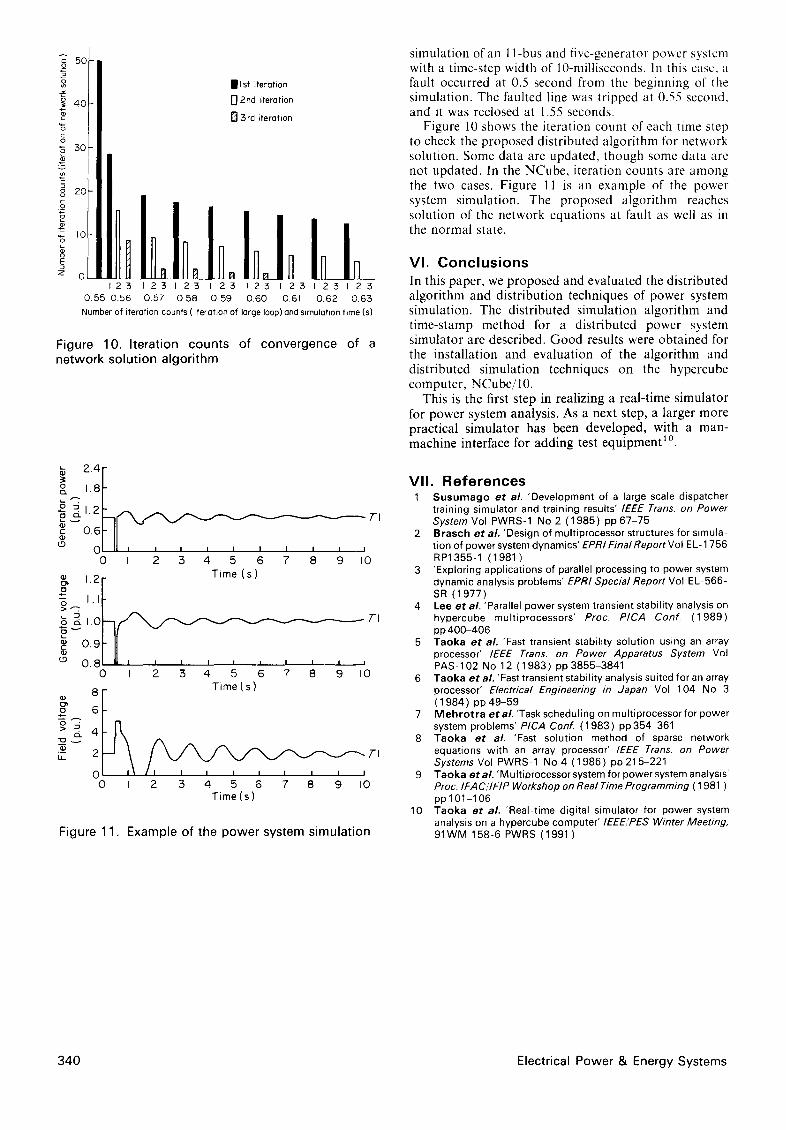
0.55 0.56 0.57 0.58 0.59 0.60 0.61 0.62 0.63 Number of iteration counts (iteration of large loop) and simulation time (s)
F igure 10. I te ra t ion coun t s of c o n v e r g e n c e of a n e t w o r k s o l u t i o n a l g o r i t h m
2'4 r
o ,.81_ ° = 1 2 " S d . " I ~ 7"
0.6
0 I 2 3 4 5 6 7 8 9 I0 1.2 Time (s)
°9[ 0.81 II , , i i , , , , i ,
0 I 2 3 4 5 6 7 8 9 I0 Time ( s )
i2 TI
0 I 2 3 4 5 6 7 8 9 I0 Time (s)
F igure 11. Examp le of the p o w e r sys tem s i m u l a t i o n
simulation of an I l-bus and five-generator power syslcm with a time-step width of 10-milliseconds. In this case, a fault occurred at 0.5 second from the beginning of the simulation. The faulted line was tripped at 0.55 second, and it was reclosed at 1.55 seconds.
Figure 10 shows the iteration count of each time step to check the proposed distributed algorithm for network solution. Some data are updated, though some data arc not updated. In the NCube, iteration counts are among the two cases. Figure 11 is an example of the power system simulation. The proposed algorithm reaches solution of the network equations at fault as well as in the normal state.
VI. Conclusions In this paper, we proposed and evaluated the distributed algorithm and distribution techniques of power system simulation. The distributed simulation algorithm and time-stamp method for a distributed power system simulator are described. Good results were obtained for the installation and evaluation of the algorithm and distributed simulation techniques on the hypercube computer, NCube/10.
This is the first step in realizing a real-time simulator for power system analysis. As a next step, a larger more practical simulator has been developed, with a man- machine interface for adding test equipment 1°.
VII. References 1 Susumago et al. "Development of a large scale dispatcher
training simulator and training results' IEEE Trans. on Power System Vol PWRS-1 No 2 (1985) pp 67-75
2 Brasch et al. 'Design of multiprocessor structures for simula- tion of power system dynamics' EPRIFinalReportVol EL-1756 RP1355-1 (1981)
3 'Exploring applications of parallel processing to power system dynamic analysis problems' EPRI Special Report Vol EL-566- SR (1977)
4 Lee et al. 'Parallel power system transient stability analysis on hypercube multiprocessors' Proc. PICA Conf. (1989) pp 400 406
5 Taoka et al, 'Fast transient stability solution using an array processor' IEEE Trans. on Power Apparatus System Vol PAS-102 No 12 (1983) pp 3855-3841
6 Taoka et al. 'Fast transient stability analysis suited for an array processor' Electrical Engineering in Japan Vol 1 04 No 3 ( 1 984) pp 49-59
7 Mehro t ra eta/ . 'Task scheduling on multiprocessor for power system problems' PICA Cant (1983) pp354 361
8 Taoka et al. 'Fast solution method of sparse network equations with an array processor' IEEE Trans. on Power Systems Vol PWRS-1 No 4 (1986) pp 215-221
9 Taoka eta/ . 'Multiprocessor system for power system analysis' Proc. IFAC/IFIP Workshop on Real Time Programming ( 1981 ) pp 101-1 06
10 Taoka et al. 'Real-time digital simulator for power system analysis on a hypercube computer' IEEE/PES Winter Meeting, 91WM 158-6 PWRS (1991)
340 Electr ical P o w e r & Energy Sys tems