Embed Size (px)
Citation preview

1
A Computational Framework for a Situated Design Agent, Part B:Constructive Memory
John S. Geroa∗ and Gregory J. Smitha
aKey Centre of Design Computing and Cognition,Faculty of Architecture,University of Sydney, Australia
Memory in a computational system is usually taken to be a place filled with things called “memories”. Theseplaces are indexed by either knowing its location or its content. For situated design agents, however, memory isa reflection of how the system has adapted to its environment. This paper describes the characteristics requiredof such a memory in a situated design agent.
1. Introduction
John: How “computational” is this?Change title of this and Part A?
In (Gero and Smith 2006) we revisited (Geroand Fujii 2000) and briefly introduced an expe-riential model of situation design agency. In thispaper we consider in greater detail the kind ofmemory an agent of the kind described shouldhave. Memory in a computational system is usu-ally taken to be a place filled with things called“memories”. These places are indexed by eitherknowing its physical location or its content. Forsituated design agents, however, memory is a re-flection of how the system has adapted to its envi-ronment. Recollection should be more than look-ing up records – it should be past experiencesguiding active ones. The inspiration behind theconstructive memory model described in this pa-per is two phrases. The first is Clancey (1997)paraphrasing Dewey:
“Sequences of acts are composedsuch that subsequent experiences cat-egorise and hence give meaning towhat was experienced before”
The second is by Bartlett (1932):
∗This research was supported by a grant from the Aus-tralian Research Council.
“Remembering is not the re-excitation of innumerable fixed, life-less and fragmentary traces. It is animaginative reconstruction, or con-struction, built out of the relation ofour attitude towards a whole activemass of organised past reactions orexperience, and to a little outstand-ing detail which commonly appearsin image or in language form.”
Our aim is a contemporary interpretation of theseexperiential views of agent memory. Given therisks of using the word “imaginative” in a work ondesign agents, we shall hereafter refer to “recon-struction” rather than “imaginative reconstruc-tion”. We will hold on to the idea of a con-structive memory inventively filling-in partly rec-ollected experiences but we refrain from callingsuch processes “imaginative”.
The basis of the following descriptions of con-structive memory is the idea of experiences. Ourideas of experience often trace back to Dewey, al-though we now use more contemporary descrip-tions of these ideas. We use Dewey and Bartlettas inspiration, not as a statement of requirements.Dewey described the quality of an experience ashaving two aspects:
“There is an immediate agreeable-ness or disagreeableness, and there is
2
its influence upon later experiences”(Dewey 1938)
Dewey called the first aspect continuity.
“every experience enacted and under-gone modifies the one who acts andundergoes” (Dewey 1938)
“The principle of continuity of expe-rience means that every experienceboth takes up something from thosewhich have gone before and modifiesin some way the quality of those whichcome after” (Dewey 1938)
“The basic characteristic of habit isthat every experience enacted and un-dergone modifies the one who acts andundergoes, while this modification af-fects, whether we wish it or not, thequality of subsequent experiences ”(Dewey 1938)
Dewey called the second aspect interaction.
“Experience does not simply go on in-side a person. It does go on there ...but this is not the whole of the story.Every genuine experience has an ac-tive side which changes in some degreethe objective conditions under whichexperiences are had” (Dewey 1938)
So an experience is an interplay of continuity andinteraction.
“Taken together, or in an interplay oftheir interaction, they form what wecall a situation” (Dewey 1938)
“An experience is always what it is be-cause of a transaction taking place be-tween an individual and what, at thetime, constitutes his environment”(Dewey 1938)
What do the Dewey (Clancey) and Bartlett in-spirations mean in contemporary, computationalterms? The key phrases are
• “experiences” – Section 2
• “sequences of acts” – Section 3
• “subsequent experiences ... experienced be-fore” and “composed” – Section 4
• “reconstruction” and “categorise and hencegive meaning” – Section 5
2. Experiences
If there are experiences there must be agents.In this work we take humans interacting withcomputational systems and artificial agents toalso be agents. We shall denote agents asα1, α2, . . .
An entity cannot be an agent unless it is em-bodied in some environment, be it of our worldor of a virtual world. We shall denote the envi-ronment as ξ. As agents are embodied,
• α1, α2, . . . are a part of ξ
• α1, α2, . . . are distinct from each other andfrom ξ
We need not restrict the environment to onlycontain agents. So we say that an environmentis composed of entities, some of which are agent-entities (agents) and some of which are not. Weshall say that the non-agent entities of the en-vironment are thing-entities (things) that we de-note γ1, γ2, . . . For things,
• γ1, γ2, . . . are a part of ξ
• γ1, γ2, . . . are distinct from each other, fromξ, and from α1, α2, . . .
As Dewey (1917) noted, an experience is not ofa disembodied agent2. It is to do with interactionof the agent with an environment. An experienceis also not something static; it is dynamic and is ofcertain kinds of entities that are coupled to theirenvironment. This “entities ... coupled to theirenvironment” is like Dewey’s (1938) experiencechanging “the objective conditions under whichexperiences are had”.
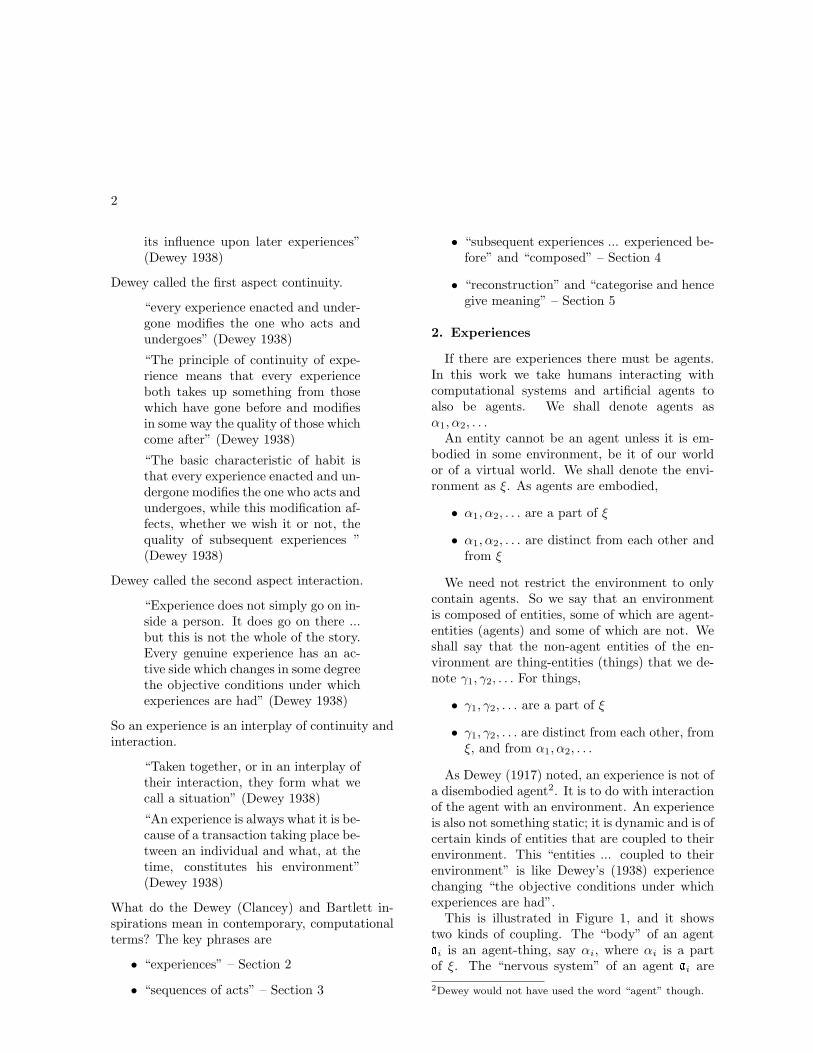
This is illustrated in Figure 1, and it showstwo kinds of coupling. The “body” of an agentai is an agent-thing, say αi , where αi is a partof ξ. The “nervous system” of an agent ai are
2Dewey would not have used the word “agent” though.
3
Environment
Agent-thing
Agentconstructs
Figure 1. Agent coupled to the environment. Thefigure is derived from (Beer 2003).
construct-entities (constructs) {β1i , β
2i , . . .}. The
scare quotes are because the words “body” and“nervous system” are those used by Beer butwhich we avoid. Construct-entities are parts ofagent-things, so each βj
i is a part of αi . Theagent ai is an agent-entity that is the compositionof an agent-thing αi and constructs {βj
i }. Thatpart of the environment that is not the agent isξ − ai = ξ − (αi ∪ {βj
i }).A coupling between ξ and an agent-thing αi is
an e-experience (an exogenously generated expe-rience) of ai . An example is robot navigation ex-periences involving sonar sensual experiences andmotion effectual experiences. A coupling betweenthe agent-thing αi and agent constructs {βj
i } is ana-experience (an autogenously generated experi-ence) of ai . An example is a human moving theirarm, involving sensual experiences of propriocep-tion and motor effectual experiences. Further, e-experiences and a-experiences may perturb eachother directly or indirectly. An e-experience per-turbs an a-experience if the agent interprets thate-experience. An e-experience fails to perturban a-experience if the agent ignores it. An a-experience perturbs an e-experience when theagent acts on its environment – when that agent
perturbs other agents or things.
3. Sequences of acts
We shall denote an experience of agent aias eki . If an e-experience is able to perturban a-experience and vice versa, an agent mustbe able to have multiple concurrent experiences{e1i , e2i , . . .}. An e-experience involves entitiesperturbing each other, where one of the entities isan αi and the other is either another agent αj ora thing γm . An a-experience also involves entitiesperturbing each other, where one of the entities isan αi but where the others are constructs {βj
i }.In order for one to perturb another there must beeither
• Some point at which they synchronize,such as one computational process syn-chronously passing a message to another,or
• Some intermediary on which each synchro-nizes, such as one computational processasynchronously passing a message to an-other.
For an experience ex to perturb another expe-rience ey there must be some part of ex that isalso part of ey . That common part may be sosmall (or temporally atomic) that we would callit an event but it must be part of each or theycould not synchronize. Having a common partdoes not imply that ex and ey are the same. Acomputational process can send another a mes-sage and the actual communication event is com-mon, but each process will have been behavingdifferently before and after the event. For one ex-perience to perturb another requires two things:that experiences can have parts that are them-selves experiences, and that some experiences canbe parts of multiple experiences. We can de-scribe this using mereological relations on pro-cesses (Seibt 2004, Smith 1996). These mereolog-ical relations are useful as a means to describingproperties of experiences without the descriptionsnecessarily being reductionist.
An experience can be a part of another expe-rience. An experience that is a part of, but not

4
identical to, another experience is a proper part.An experience with no proper parts is atomic.If the experience is temporally atomic but spa-tially not, we call it an event (Something spatiallyatomic but temporally not is an entity). Twoexperiences with one or more common parts aresaid to overlap. Experiences that perturb eachother must overlap. Experiences are disjoint ifthey never overlap. An experience ex is emergentfrom experiences {ey | y 6= x} if3:
• ex is a part of the sum of {ey | y 6= x}
• No part of ex , including itself, is a part ofany ey (for y 6= x )
We write ex v ey to mean “experience ex is apart of experience ey”. We write ex @ey to mean“experience ex is a proper part of experience ey”.We write ex©ey to mean “experience ex overlapsexperience ey”. So
ex @e
y = (ex vey ∧ ex 6= e
y) (1)ex © e
y = (∃ ez • ez vex ∧ ez vey) (2)
perturbs(ex , ey) ⇒ ex © e
y (3)
Unless an experience is infinite, something mustcause it to begin. So the thing that delineates oneexperience from the next is a change to a differ-ent action. An experience does not begin becausethe environment has decided to start sending anagent data, or to change to sending it data thatis somehow different. Such distinctions are up tothe agent. An experience starts when the agentactivates an action that is qualitatively differentfrom active experiences. The action may be thata person changes their visual focus of attention:agent constructs βj
i sufficiently perturb the agent-thing αi to change what from its visual field it islooking at, triggering a new a-experience. Theaction may be that the robot moves in the world:agent constructs βj
i sufficiently perturb the agent-thing αi to trigger a new a-experience, and thenew a-experience perturbs the environment byshifting the robots location in it, triggering a newe-experience.
3This is from (Seibt 2004), where it is defined more pre-cisely.
So there are experiences {eki }, and experi-ences are triggered by agent actions. Both a-experiences and e-experiences are triggered by anaction. Hence if there is an experience eki , theremust have been another experience el that over-laps eki at its start. Adopting the relations ofAllen on the temporal extents of experiences (seeSection A),
eki ∈ E⇒ (∃ el ∈ E •
k 6= l ∧ eki © e
l ∧ starts(el , eki )) (4)
Usually el will be of the same agent as eki , orel ≡ eli . The cases where it is not is are thosee-experiences when one agent creates another.What finishes an experience? Another actiontriggering another experience, although it is ac-ceptable for an experience to autonomously ex-tinguish. Sense-data from another agent or froma thing, and effect-data to another agent or thing,are perturbations of an experience. These sense-data and effect-data do not start new experiences.Recognising that a perturbation is qualitativelydifferent may cause a new a-experience but thisrecognition is an autogenous act of this agent.The new experience isn’t caused by the externalagent or thing, it is caused by the agent of theexperience.
What counts as qualitatively different is up tothe agent. Adjusting a motor controller to remainon course may involve actions that vary quanti-tatively but not qualitatively, and so would be acontinuation of the same experience. Deciding totop moving and start vacuuming would be qual-itatively different and so would be another expe-rience.
The experience isn’t the agent taking an actionfollowed by it sitting there waiting for somethingto send it data. Rather, sensations are parts ofexperiences and so require actions, even if thoseactions are internal to the agent.
“Upon analysis, we find that we be-gin not with a sensory stimulus, butwith a sensori-motor coordination,the optical-ocular ... the real begin-ning is with the act of seeing; it islooking, and not a sensation of light.
5
The sensory quale gives the value ofthe act, just as movement furnishes itsmechanism and control, but both sen-sation and movement lie inside, notoutside the act” (Dewey 1896).
“It feels distinctly uncomfortable toconceptualize people (persons) asthings (substances) ... However, thereis no problem with experiential accessto the processes and patterns of pro-cess that characterize us personally”(Rescher 2002).
“Instead of very small things (atoms)combining to produce standard pro-cesses (windstorms and such), mod-ern physics envisions very small pro-cesses (quantum phenomena) com-bining in their modus operandi toproduce standard things (ordinarymacro-objects)” (Rescher 2002).
An agent is more than a feed-forward pipelineof sensation, conception and effection processes.Rather, an experience is an ongoing, interactivedynamic. Failing
“to see unity of activity, no matterhow much it may prate of unity, it stillleaves us with sensation or periph-eral stimulus; idea, or central process(the equivalent of attention); and mo-tor response, or act, as three discon-nected existences, having to be some-how adjusted to each other, whetherthrough the intervention of an extra-experimental soul, or by mechanicalpush and pull” (Dewey 1896).
“If one is reading a book, if one ishunting, if one is watching in a darkplace on a lonely night, if one isperforming a chemical experiment, ineach case, the noise has a very differ-ent psychical value; it is a different ex-perience. In any case, what proceedsthe ‘stimulus’ is a whole act, a sensori-motor coordination” (Dewey 1896).
Some of the work done on “direct perception” inthe past is of interest here. Shaw and Todd (1980)
are an example. They describe interactions of anagent as a dual pair of agent-environment equa-tions:
• The next response by the agent on environ-ment is a function of the current stimuluson the agent by the environment and thehistory of the “state of affairs” of the agentconcerning its “transactions” with the envi-ronment up until the current time
• The next stimulus on the agent by environ-ment is a function of the current responseby the agent on the environment and thehistory of the “state of affairs” of the agentconcerning its “transactions” with the envi-ronment up until the current time
We are not describing “direct perception” but theresemblance of “state of affairs ...” to experiencesshould be clear. The important thing about theseequations is that the agent is not described asa state machine. Beer also characterises agentswith a dual pair of agent-environment equations:
“an agent and its environment shouldbe understood as two coupled dynam-ical systems whose mutual interactionis jointly responsible for the agent’sbehavior” (Beer 1997).
One difference of Shaw and Todd with Beer isthat the latter’s equations update an agent’s in-ternal state and this state drives future interac-tions, whereas the former simply requires that fu-ture interactions depend on past ones. For Beerthe next state of the agent depends on the cur-rent state of the agent and environment. ForShaw and Todd the next response depends oncurrent stimuli and past experiences, not on anabstracted representation of past experiences asstate. Somewhere in the middle are Wegner andGoldin (1999): dynamic, non-deterministic butstate-based but where future states depend on astream of past actions and outputs, not only onthe current state.
4. The role of past experiences
Let αi be an agent in environment ξ and let{βj
i } be constructs of ai . So αi is a part of ξ and

6
each of {βji } is a part of αi . eki is an experience
of agent αi if it is of the agent-entity that is thecomposition of αi and {βj
i }. eki is e-experience ifit is perturbed by or perturbs one or more entitiesnot part of ai . eki is an a-experience if it is per-turbed by or perturbs one or more entities fromai , but is not perturbed by and does not perturbany entities not part of ai .
When one entity perturbs an experience of an-other we say that there is an effect on that entity.An effect by αi on ξ−ai is via an effector of agentαi and is of an e-experience. An effect by ξ−aion αi is via a sensor of agent αi and is of an e-experience. Effects that are of a-experiences areinternal to the agent and are via perceptors, con-ceptors and action activators.
The role of past experiences on active onesis central to the what a constructive memory isabout. Dewey again:
“While this is generally admitted, itis often thought that the laws ofthe association of ideas, conjoinedwith the past experience, are enoughto account for the facts of memory.We have had experiences; these existstored up, in some unexplained way,in the mind, and when some experi-ence occurs which is like some one ofthese, or has been previously contigu-ous with it in time or space, it callsthis other up, and that constitutesmemory. This, at most, solves but onehalf the problem. The association ofideas only accounts for the presenceof the object or event. The other halfis the reference of its present imageto some past reality. In memory were-cognize its presence; i.e., we knowthat it has been a previous elementof our experience. We place the im-age in the train of our past experi-ences, we give it some temporal rela-tion; we refer it to some real objectonce perceived. No idea, however itcomes into the mind, certifies of it-self that it has ever been experiencedbefore, or under what circumstances
it has been experienced. The mindmust actively take hold of the ideaand project it into time, just as in per-ceiving it takes hold of the sensationand projects it into space. Were itnot for this projecting activity of themind all would be a fleeting present;the range of intelligence would not ex-tend into a past world” (Dewey 1887)
At a particular time ai will have some numberof active experiences {eki }. Some of these will beperturbed by other experiences from {eki }, someby entities from ξ − ai , and some by both. Con-sider a particular active experience eki . One per-turbation of eki was of the action that start it,another is the perturbation that finishes eki . If ekiis an e-experience then some other agent-entities,or thing-entities, or both, will perturb eki . If eki isan a-experience then only αi ∪ {βj
i } will perturbeki .
An agent will have some minimal rationality(see (Cherniak 1986)), so the way that an agentguides an experience must not be at random. Thefuture of eki at some time t will depend on
• How eki came to be what it is at t – call thisthe trajectory traj (eki , t) of eki until t ,
• What perturbations of eki there have beenup until time t – call this the historyhist(eki , t) of eki until t , and
• The situation at t .
Let e1, e2, . . . ∈ E be particular experiences andtproj (ek ) be the projection of a particular expe-rience onto an interval of time, or
tproj : Expr → (τ × τ ) (5)
The limit of the temporal extent of a history anda trajectory is the current time. For all e ∈ Ei
and all t ∈ τ ,
hist(e, t) ⊆ e (6)traj (e, t) ⊆ e (7)hist(e, t) ⊆ traj (e, t) (8)
7
∃ t1, t2 •tproj (traj (e, t)) = (t1, t2)∧ max (t1, t2) = 2) (9)
∃ t1, t2 •tproj (hist(e, t)) = (t1, t2)∧ max (t1, t2) = 2) (10)
An agent should recognise in an active experiencesomething of the trajectory, or history, or both ofpast experiences and use these to project forward.This is continuity. Recognising the continuity ofexperiences is what we call memory. It is guid-ing an experience in a fashion similar to how pastexperiences progressed, and recognising that thisis so. Memory is not retrieving an object from adata store. It is experiences being guided in famil-iar ways. If an experience is to do with continuityand interaction, what is required of an agent tofacilitate this?
We denote the type of experiences of ai asEi such that e1i , e
2i , . . . ∈ Ei . Now for continu-
ity something persists, and for interaction some-thing changes. So experiences have a temporalaspect, but it cannot be solely temporal. Sup-pose we want to look closely at an experience andsee what this “something” of experiences is, sowe fixate on an experience at a particular timet ∈ τ . This fixation is a function from Ei ontosome space that we denote as Ni . Let that func-tion be onetimei : Ei → τ → Ni for agent ai andtime t . As we have only fixed a time, the resultis a subspace of reduced dimension: dim(τ ) > 1and dim(Ni) = dim(Ei)−dim(τ ). We shall writeeki (t) to mean (onetimei eki t) with a result n ∈ Ni
that is what that particular eki ∈ Ei was like attime t ∈ τ . If eki is from the space Ei , this n ∈ Ni
is from a hyperplane that is a subspace of Ei . Atrajectory is these n changing over time. Eachhyperplane will contain “somethings” that havemeaning to the agent, so we call the subspaceNi the space of notions of ai . We use the word“notion” to maintain independence from any par-ticular kind of agent representation.
The concepts C, percepts P, acts A, sense-dataS and effect-data E of an agent are all subspacesof N . Any subset of N is a notion, including
∅ and N itself, as is the intersection of any twonotions. As such, any given notion n will be asubset of N , or n ⊆ N . Further, that n mayitself contain other notions that are themselvesboth a subset of n and a subset of N .
A space N may be defined inductively for aparticular agent system. As an example, considerwanting to implement agents with notions of “Iperceive a thing x that may be a dog (proba-bility 0.6) but it may also be a statue (proba-bility 0.4)”. There will need to be concept no-tions corresponding to “dog” and “statue” fromC′ ⊆ C ⊂ N . There also needs to be no-tions of interpretation. In this case the inter-pretations could be of (C′ → R) ⊂ N such as{(dog , 0.6), (statue, 0.4), . . .}.
If experiences were computed by a Rete engine,eki (t) would use the set of facts asserted at t . Ifexperiences were computed by a neural network,eki (t) would use network weights and neuron acti-vations at t . For a Beer-style agent, eki (t) woulduse the state vector and its gradient at t . Evenfor a Shaw-Todd-style agent, we could write anexpression for eki (t) that would use the state ofaffairs until t along with the stimuli and response.The Shaw-Todd-style agent itself would not knowanything of this expression. It simply keeps onwith its direct perception. But we as observerscould – after the fact – describe what happenedin this way. This is important: eki (t) as a sub-space of notions from eki at a particular time isonly our observer description. This is because
1. The implemented agent may not be awareof time as such: it may just compute a newresponse every time there is a new stimulus.
2. Recollecting an experience differently onlybecomes evidently so if the original expe-rience is available for comparison. We asobservers may know that an experience haschanged but the agent probably would not.
An eki is a mathematical object with a particularvalue. Imagine an agent ai at time t building thetower on model of (Gero and Smith 2006, Fig-ure 8(a)). A number of experiences would beactive: ei ⊆ { moving-the-hand-that-holds-the-yellow-block, perceiving-the-tower, conceiving-of-
8
a-model-church, . . .}. These experiences perturbeach other, as do sense-data and effect-data fromthe thing that is aggregation of Lego blocks in(Gero and Smith 2006, Figure 8(a)). Low levelexperiences like the first two here will be familiarto the agent as they involve notions and processessimilar to those of past experiences. The thirdexperience is an active current experience of con-ceiving the model church tower, but it also maybe similar to past experiences and may perturbother experiences in familiar ways. The memorieshere are the agent recognising having previouslyhad a similar experience. But the current situ-ation will not be identical with the previous oneand the agent will have adapted in the meantime,so any recollected experience will be distinct froman original experience. This means that, regard-less of similarity, each recollected experience is adifferent mathematical object. If an old experi-ence was eki , any later recollection of it will bedistinct mathematical objects ek
′
i , ek ′′
i , . . ..
5. Reconstruction
Memory of an experience as “being guided infamiliar ways” is temporally twofold:
• Projecting active experiences into the fu-ture:
“experience in its vital form is ex-periental, an effort to change thegiven; it is characterized by pro-jection, by reaching forward intothe unknown” (Dewey 1917).
• Recognising having previously had a similarexperience:
“reference of its present image tosome past reality. In memory were-cognize its presence; i.e., weknow that it has been a previ-ous element of our experience”(Dewey 1887).
The most important idea from the Bartlett quoteof Page 1 should be remembered here – that rec-ollections of earlier experiences may vary. Pro-jections into the past and future are not against
recordings of experiences, they are against recon-structions of experiences.
If a memory is an experience being guided in afamiliar way, but the agent has adapted to otherexperiences since that familiar experience was ac-tive, then what the agent remembers at the latertime may not be what was originally the case. Letthe active experiences of agent αi at a time t bese = {eki }. If the agent recollects these at somelater time:
• one or more e from se may be different thanit was at the original time
• the order of one or more e from se may bedifferent than it was at the original time
• one or more e from se may not be recol-lected at the later time
• one or more e not from se may be recol-lected at the later time
So a perturbation may trigger the recall of an ex-perience but the perturbation may be understooddifferently when recalled. The reasons for this in-clude:
• The agent adapts to subsequent experi-ences, hence recollections of what was ex-perienced before may be different.
• Memories of experiences are dynamic andinterlinked, so a recollection is a reconstruc-tion rather than a lookup. This is imper-fect recollection accompanied by filling-in ofwhat is missing.
• The agent adapts to subsequent experi-ences, hence some recollections of what wasexperienced before may be interpreted dif-ferently.
• The role of the current situation; see Section6.
What does it mean to say that an agent recol-lects an experience at a later time? Consider anactive experience eki at the current time t . Firstly,we need to consider the trajectory and history ofeki at t . An Ei is an experience as something of

9
“what it feels like” to be agent i , and a trajectoryto t is of an experience up until t . An agent pur-suing a goal will activate many actions, and eachaction will overlap with another e-experience ora-experience. Histories are of perturbations be-tween experiences and so are overlaps of experi-ences. As such a history is temporally ordered,is of parts of an experience, but is discontinuous.Now an abstraction is the construction of a typeX ′ out of a type X by ignoring that which is notrelevant. We wish to restrict Ei to those elementsthat we intuitively think of as being experiences.So let the supertype of Ei be the type Pi , or
Ei ⊂ Pi (11)
A Pi may or may not be temporally or spatiallycontinuous, and may or may not be temporallyor spatially atomic. A history is therefore of asubtype of Pi that need not be temporally con-tinuous and that satisfies Expressions (6) to (10).An experience is a subtype E ⊂ P that is tem-porally continuous and is neither temporally norspatially atomic. An event is a subtype that4 istemporally atomic but not spatially atomic. Anentity is a subtype Θ ⊂ P that is spatially atomicbut temporally not. Constructs ΘC ⊂ Θ andthings ΘT ⊂ Θ are subtypes of Θ.
We shall denote situations of ai as ψ1i , ψ
2i , . . .
of type Ψi (see Section 6). Let us say thatrecall(eki , e
li , ψ
ti ) means that a recalled experience
eli is familiar to eki in the current situation. Thatis, eli at some time t ′ < t is similar in some wayto eki at the current time t , given that the cur-rent situation is ψt
i . Now eki and eli have differ-ent temporal extents, so let aproji(eki , t , ψ
ti ) be eki
projected onto a different temporal dimension: ofthe same time scale but with t located at timezero.
aproji : Pi → τ → Ψi → Pi (12)
The projection aproj is affected by the age of therecalled experience: the older the original expe-rience is, the less likely it is that it should berecalled. It is also projected with respect to thecurrent situation. See Section 9.4These subtypes are inspired by (Seibt 2004).
We need to be able to judge the similarityof two projected experiences. van der Aalst,de Medeiros and Weijters (2006) consider pairsof Petri net models N1 and N2. They measureprocess equivalence is by finding those firing se-quences of N1 that also appear in N2. In that lightwe define similarity of two experiences as thatpart of one experience that is recollected fromanother experience
similarity(hk , h l) =| hk ∩ h l || hk |
(13)
where hk = hist(aproj (eki , t , ψti ), 0) and h l =
hist(aproj (eli , t′, ψt
i ), 0) are projected histories ofthe experiences. | hk | is some quantitative mea-sure of the extent of hk . hk ∩ h l is defined usingthe mereology product relation (Seibt 2004):
hm = hk ∩ h l = ∀ hn •(hn v hk ∧ hn v h l) ⇔ hn v hm (14)
So recall(eki , eli , ψ
ti ) if eki at the current time
t is similar to eli at some prior time and thereare no other more similar experiences that can berecalled.
recall(eki , eli , ψ
ti ) ⇒ argmax
eli , t
′similarity(
hist(aproj (eki , t , ψti ), 0),
hist(aproj (eli , t′, ψt
i ), 0)) (15)
Notice that similarity is with respect to the cur-rent situation. Recall isn’t looking up experiencesin storage somewhere; it is reconstructing past ex-periences in the current situation.
If we want an agent to be constructive and onlyconstructive then we would need to force it to be-have only in the way described. We could give it aGoogle-like memory that just records everythingthat happens but using such a memory would notbe constructive. It may be okay for an agentto sometimes be constructive and sometimes not.Perhaps sometimes it needs to be creative, othertimes it needs to recall facts. The distinction isbetween subjective and objective memories. Sub-jective memories are the kinds of reconstructionthat we have been describing. They are of what it
10
feels like to be this agent. Examples of objectivememories are “a magnetic flux density of 1 tesla is1 weber of magnetic flux per square metre”, “anaction is always opposed by an equal reaction”and “I owe Mungo $2.50 for coffee yesterday”. Itis for objective memories that an artificial agentwith a constructive memory may sometimes alsowant non-constructive recall. But having objec-tive and subjective memories does not necessi-tate an artificial agent having distinct or separatememory mechanisms. The same memory couldbe used but with habituation differing in differ-ent layers (see Sections 7 and 8).
6. What does a situation look like?
A situation is a characteristic of an environ-ment containing interacting agents and things.Recognising that there is a situation is like recog-nising that there is music and so requires anagent. So that which we call “the situation” isa representation by an agent, but a representa-tion of what? The situation is an influence onhow the world is viewed. Notice that the situa-tion is not “a view of the world”; it is a processthat changes how those notions behave. To il-lustrate, consider a story. In the first version ofthe story a man is standing with his back to alarge tree. I start walking towards the tree, butthe man is paranoid and so believes that I am af-ter him. He takes fright and runs away. In thesecond version of the story a woman is standingwith her back to the same tree. The tree containsa flock of Galahs5. The tree in the first story alsocontained the Galahs but the man was to self-absorbed to notice. I start walking towards thetree. The woman is confident, not paranoid, andhears the birds in the tree. She turns around tosee the birds I am obviously, to her mind, lookingat.
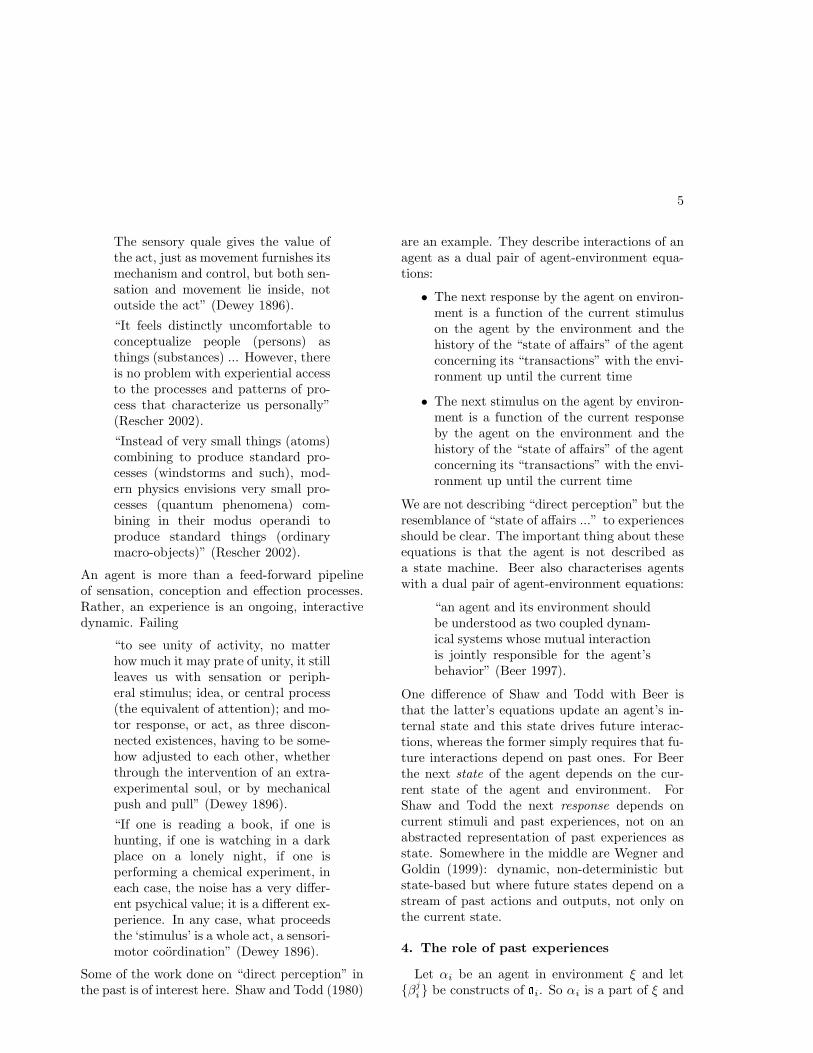
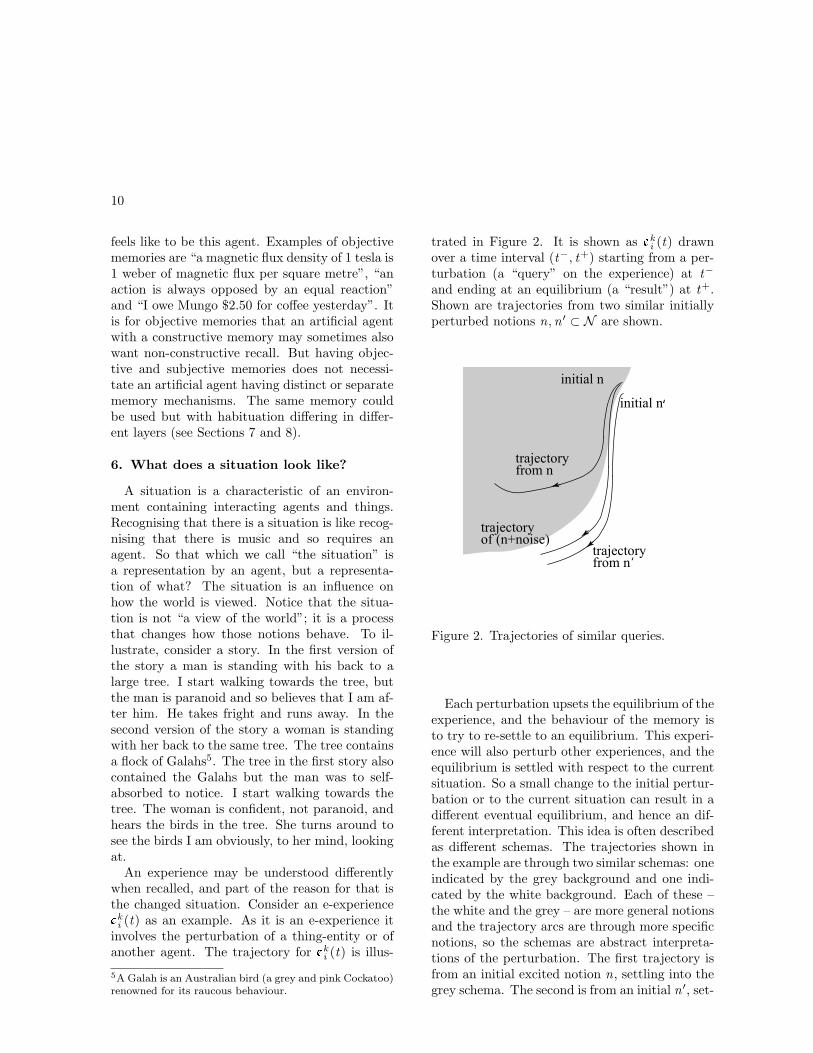
An experience may be understood differentlywhen recalled, and part of the reason for that isthe changed situation. Consider an e-experienceeki (t) as an example. As it is an e-experience itinvolves the perturbation of a thing-entity or ofanother agent. The trajectory for eki (t) is illus-
5A Galah is an Australian bird (a grey and pink Cockatoo)renowned for its raucous behaviour.
trated in Figure 2. It is shown as eki (t) drawnover a time interval (t−, t+) starting from a per-turbation (a “query” on the experience) at t−
and ending at an equilibrium (a “result”) at t+.Shown are trajectories from two similar initiallyperturbed notions n,n ′ ⊂ N are shown.
initial n
‘initial n
trajectoryfrom n
trajectoryof (n+noise)
trajectoryfrom n ‘
Figure 2. Trajectories of similar queries.
Each perturbation upsets the equilibrium of theexperience, and the behaviour of the memory isto try to re-settle to an equilibrium. This experi-ence will also perturb other experiences, and theequilibrium is settled with respect to the currentsituation. So a small change to the initial pertur-bation or to the current situation can result in adifferent eventual equilibrium, and hence an dif-ferent interpretation. This idea is often describedas different schemas. The trajectories shown inthe example are through two similar schemas: oneindicated by the grey background and one indi-cated by the white background. Each of these –the white and the grey – are more general notionsand the trajectory arcs are through more specificnotions, so the schemas are abstract interpreta-tions of the perturbation. The first trajectory isfrom an initial excited notion n, settling into thegrey schema. The second is from an initial n ′, set-

11
tling into the white schema. The third illustratesthe idea that a small change to the starting point(in the example it is starting from a noisy n), achange to the situation before the query has set-tled, or a new perturbation before the former hassettled can result in a large change in where itends up, including being in a different schema.Such a change can change the focus of attentionof an agent, or even be a “Eureka” moment. Weshall, however, avoid using the word “schema”as it has been applied so variously that we riskimplying something unintended to some readers.Indeed, problems with the word were recognisedat least as long ago as Bartlett, so we adopt dy-namical systems words like “perturb” and “equi-librium” instead.
“I strongly dislike the term ‘schema’.It is at once too definite and toosketchy ... It suggests some persis-tent, but fragmentary, ‘form of ar-rangement’, and it does not indicatewhat is very essential to the whole no-tion” (Bartlett 1932)
Not reaching an equilibrium within some compu-tational bounds triggers the agent to adapt suchthat a similar perturbation in future will find anequilibrium. This means that influences betweennotions may change, or that the space of notionsknown to the agent may change.
As has been noted, the agent may have multi-ple concurrent experiences. These experiences arenot hidden off in isolated compartments. Theyare all couplings of the same agent-thing, thesame agent-constructs, and the same part of theenvironment. They may be modular (see Sec-tion 9) but they still need to influence each other.So if the situation is experiences influencing eachother, changing how the world is viewed, then sit-uations are processes. We need a way to describeagent processes that lets each relevant experienceinfluence a target experience. Let a target experi-ence be that experience if the role of the situationis ignored, and call it ek∅
i (the un-situated experi-ence). The experience eki is the target experienceafter the influence of the situation with respectto one or more other experiences are included.That is, in this document an experience is situ-
ated unless it is explicitly denoted otherwise suchas in e
k∅i . The type of situations is Ψ such that
ψ1i , ψ
2i , . . . ∈ Ψi . The type of experiences of ai is
E, so situations Ψi are functions from notions Ni
and experience Ei to a result that is also a Ei .
Ψi : Ni → Ei → Ei (16)
The current situation as seen by an experienceek∅i is one or more functions Ψ that each use an-
other experience to influence this one. The ideais of the representation current situation arisingfrom expectations, so those “other experiences”are of more abstract notions. It means that howsituations change the current interpretation of anagent’s world can change. To detail this requiresthe “layers” described in Section 7 but the ideais as follows:
• An experience ek∅i will be computed by one
or more constructs cs
• At the current time t , cs will involve notionsn
• n will be in one or more layers, and theselayers will precede one or more other layers(for example, acts in Figure 3 precedes onelayer of percepts and one layer of concepts)
• Each layer constructs a situation of type Ψthat applies to layers that precede it
• Situations that apply to ek∅i at time t are
applied to give eki over temporal extent(t , t + δt).
7. An experience as notions adapting tosituations
Recall that if we fixate on experience eki at aparticular time t we see notions from a subspaceNi of the space Ei , and that a trajectory is thesenotions changing. If we looked at all notions ofall experiences of an agent at one particular timewe should notice that some notions applied moregenerally than some others. An example is ofsome concepts being more general than some per-cepts. Suppose we partition Ni into regions ofroughly equal generality, each of which is a sub-space ofNi . We will call these partitions “layers”.

12
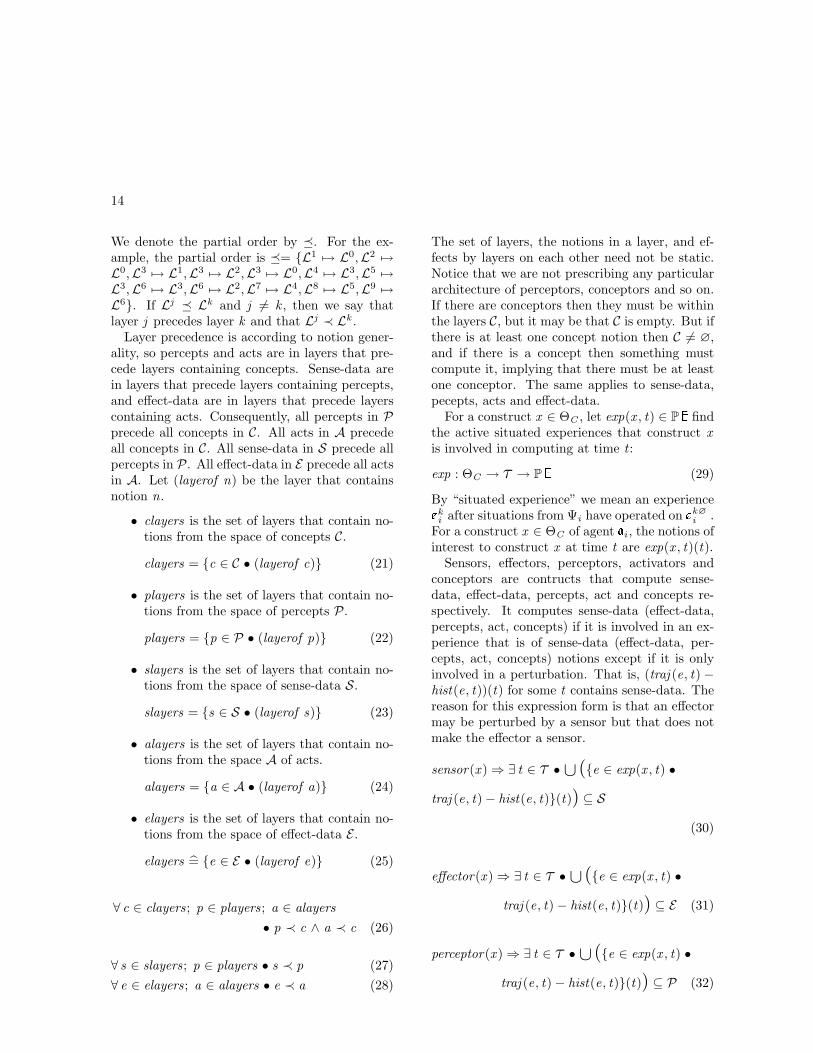
Some of these will be more general than others, soon a scale of generality some would be “less than”some others. But the “roughly equal” means thatthere may be some overlap. It is not necessary, forexample, that all concepts be more general thanall percepts. To see the effect of this, considerthe example from Appendix A. Given the tempo-ral before relation and Figure 4 we can say thatbefore(a, c), before(a, d), before(b, e) and c = d ,but before does not relate a to b. Some time in-tervals from τ × τ will be equal, some will bebefore others, and some will not be comparablewith respect to before. Those pairs of time in-tervals that are not comparable with respect tobefore are those that overlap. The word “com-parable” means that the pair are in the partialorder.
We call a partial order on generality of Ni
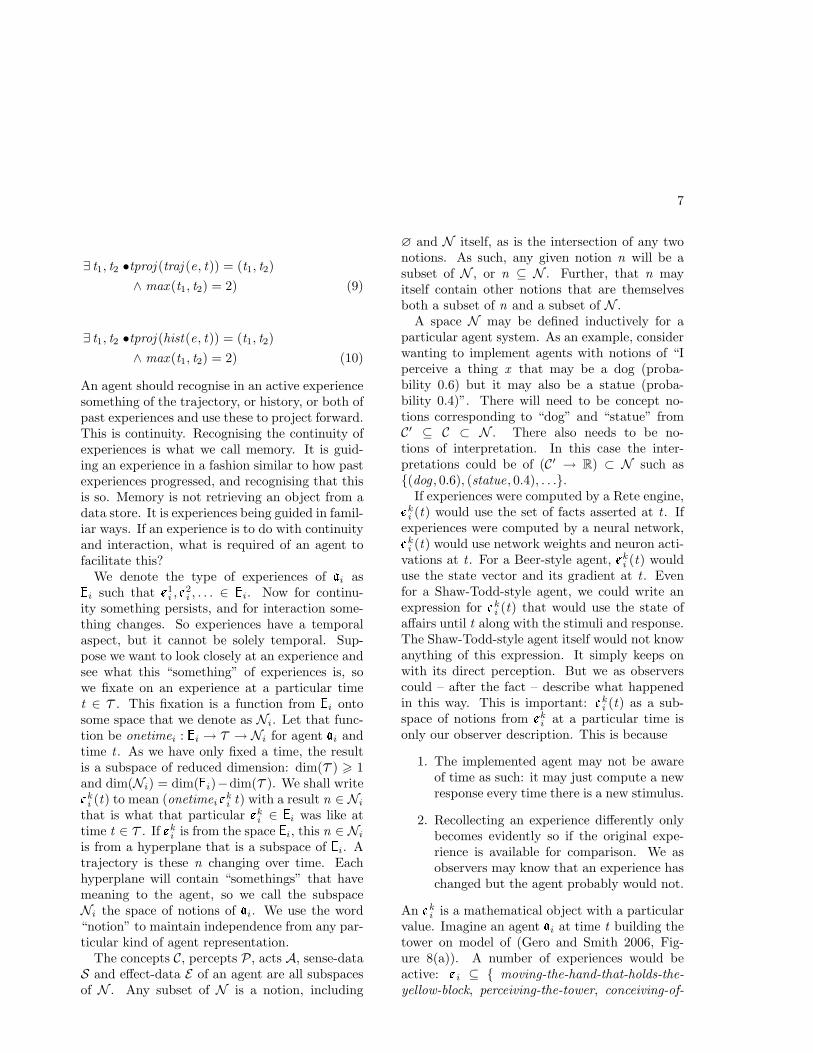
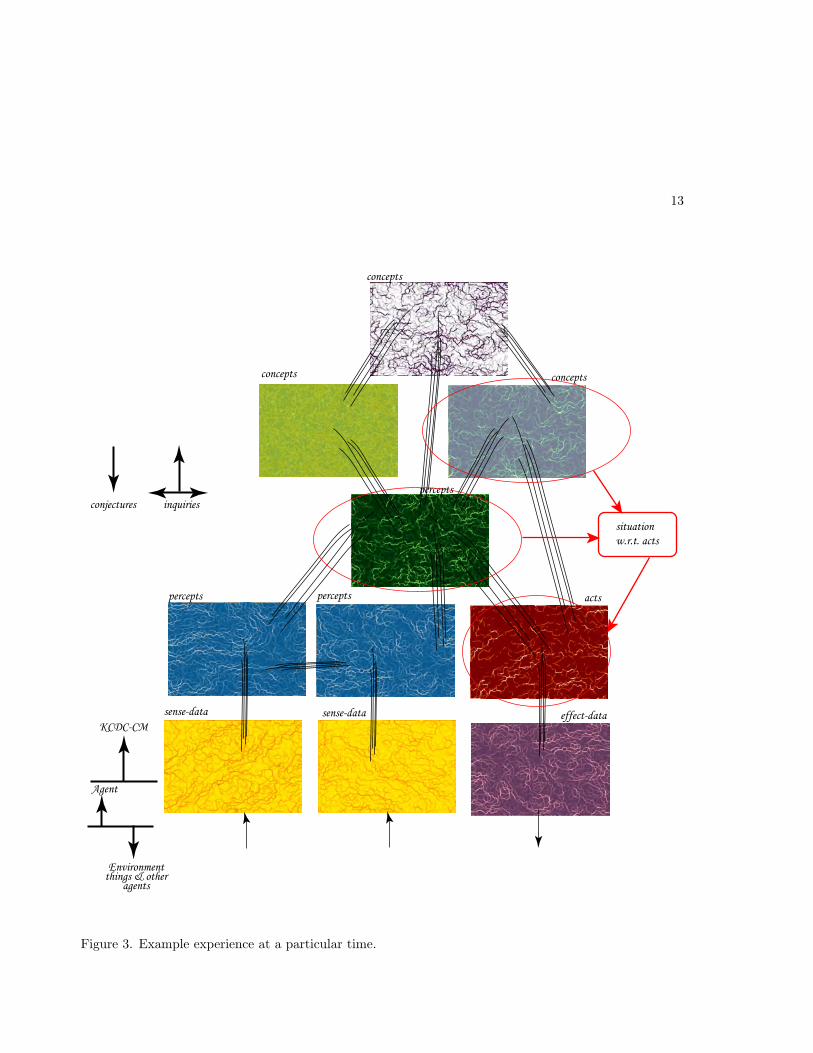
“layers”. The ordering is partial because onlysome subspaces are related by it. Not all lay-ers are comparable. Figure 3 illustrates an ex-ample experience at a particular time. It showsnotions at that time partitioned into layers; lay-ers are of notions and so are shown as patterned,coloured rectangles. But layers are not discon-nected from each other. Notions in layers influ-ence each other, illustrated in the figure with theblack lines. An example is associative adaptionof notions within and between layers (an exam-ple of non-associative adaption is habituation –see Section 9). The influence of the situation atthat time on the layer acts is also shown (onlythat one situation as it influences that one layeris shown).
Conjectures are perturbations against the di-rection of layer precedence, and so are describedas being top-down. Inquiries are either in the di-rection of precedence or are lateral, and so aredescribed as being bottom-up. These directionsare indicated on Figure 3. Notice (near the mid-dle of Figure 3) the lateral effects between twolayers of percepts. This illustrates that pertur-bations need not follow layer or level precedence.Lateral here means effects between layers with noprecedence between them, but that each precedeanother common layer. The figure also illustratesthat part of the situation that applies to the layerlabelled acts. The situation at layer acts is an in-
fluence on how the world is viewed by that layer.The situations, conjectures and inquiries are whatdrive the memory.
Let Li be the set of layers of ai and let Lji
be a particular layer, where j ∈ N is an index.Consider the Figure 3 example:
• The most general layer is at the top, beingthe most abstract concepts and so havingthe most general notions.
• The most specific layers are near the bot-tom, being sense-data and effect-data andso having the most specific notions.
• There are 2 sensors and one effector
• There are 2 sense-data layers, say L7 andL8
• There are 2 low level percept layers – oneper sensory modality, say L4 and L5
• There is one higher level percept layer, sayL3, that combines L4 and L5
• There are two concept layers, say L1 andL2, that are separate but equally general
• There is a third concept layer, say L0, thathas the highest level of concepts
• There is one act layer, say L6
• There is 1 effect-data layer, say L9
If we require that the layer indexes are consec-utive integers starting from 0, we have a set ofpairs {0 7→ L0, . . . , j 7→ Lj} for j = #L− 1. Thisis a sequence of notion spaces, where the range ofthe sequence is a set of non-empty, disjoint layersLj that collectively partition N . For all j and kin the domain of L,
j = k ⇒ Lj = Lk (17)
j 6= k ⇒ Lj ∩ Lk = ∅ (18)
N = ∪j∈domL
Lj (19)
LpartitionsN (20)
13
conceptsconcepts
percepts
actsperceptspercepts
sense-data effect-datasense-dataKCDC-CM
Environmentthings & other
agents
Agent
concepts
inquiriesconjectures
situationw.r.t. acts
Figure 3. Example experience at a particular time.
14
We denote the partial order by �. For the ex-ample, the partial order is �= {L1 7→ L0,L2 7→L0,L3 7→ L1,L3 7→ L2,L3 7→ L0,L4 7→ L3,L5 7→L3,L6 7→ L3,L6 7→ L2,L7 7→ L4,L8 7→ L5,L9 7→L6}. If Lj � Lk and j 6= k , then we say thatlayer j precedes layer k and that Lj ≺ Lk .
Layer precedence is according to notion gener-ality, so percepts and acts are in layers that pre-cede layers containing concepts. Sense-data arein layers that precede layers containing percepts,and effect-data are in layers that precede layerscontaining acts. Consequently, all percepts in Pprecede all concepts in C. All acts in A precedeall concepts in C. All sense-data in S precede allpercepts in P. All effect-data in E precede all actsin A. Let (layerof n) be the layer that containsnotion n.
• clayers is the set of layers that contain no-tions from the space of concepts C.
clayers = {c ∈ C • (layerof c)} (21)
• players is the set of layers that contain no-tions from the space of percepts P.
players = {p ∈ P • (layerof p)} (22)
• slayers is the set of layers that contain no-tions from the space of sense-data S.
slayers = {s ∈ S • (layerof s)} (23)
• alayers is the set of layers that contain no-tions from the space A of acts.
alayers = {a ∈ A • (layerof a)} (24)
• elayers is the set of layers that contain no-tions from the space of effect-data E .
elayers = {e ∈ E • (layerof e)} (25)
∀ c ∈ clayers; p ∈ players; a ∈ alayers• p ≺ c ∧ a ≺ c (26)
∀ s ∈ slayers; p ∈ players • s ≺ p (27)∀ e ∈ elayers; a ∈ alayers • e ≺ a (28)
The set of layers, the notions in a layer, and ef-fects by layers on each other need not be static.Notice that we are not prescribing any particulararchitecture of perceptors, conceptors and so on.If there are conceptors then they must be withinthe layers C, but it may be that C is empty. But ifthere is at least one concept notion then C 6= ∅,and if there is a concept then something mustcompute it, implying that there must be at leastone conceptor. The same applies to sense-data,pecepts, acts and effect-data.
For a construct x ∈ ΘC , let exp(x , t) ∈ P E findthe active situated experiences that construct xis involved in computing at time t :
exp : ΘC → τ → P E (29)
By “situated experience” we mean an experienceeki after situations from Ψi have operated on ek∅
i .For a construct x ∈ ΘC of agent ai , the notions ofinterest to construct x at time t are exp(x , t)(t).
Sensors, effectors, perceptors, activators andconceptors are contructs that compute sense-data, effect-data, percepts, act and concepts re-spectively. It computes sense-data (effect-data,percepts, act, concepts) if it is involved in an ex-perience that is of sense-data (effect-data, per-cepts, act, concepts) notions except if it is onlyinvolved in a perturbation. That is, (traj (e, t)−hist(e, t))(t) for some t contains sense-data. Thereason for this expression form is that an effectormay be perturbed by a sensor but that does notmake the effector a sensor.
sensor(x ) ⇒ ∃ t ∈ τ •∪ ({e ∈ exp(x , t) •
traj (e, t)− hist(e, t)}(t)) ⊆ S
(30)
effector(x ) ⇒ ∃ t ∈ τ •∪ ({e ∈ exp(x , t) •
traj (e, t)− hist(e, t)}(t)) ⊆ E (31)
perceptor(x ) ⇒ ∃ t ∈ τ •∪ ({e ∈ exp(x , t) •
traj (e, t)− hist(e, t)}(t)) ⊆ P (32)

15
activator(x ) ⇒ ∃ t ∈ τ •∪ ({e ∈ exp(x , t) •
traj (e, t)− hist(e, t)}(t)) ⊆ A (33)
conceptor(x ) ⇒ ∃ t ∈ τ •∪ ({e ∈ exp(x , t) •
traj (e, t)− hist(e, t)}(t)) ⊆ C (34)
In the above, difference is defined as follows. Fore1, e2, . . . ∈ E,
e3 = e
1−e2 = e3 v e
1 ∧ ¬ (∀ e4 • e4 v e3 ∧ e
4 v e2)
(35)
Given these descriptions of layers and constructswe can reconsider the description of situationsfrom Section 6.
• An experience ek∅i is computed by one or
more constructsat current time t .
cs = {c ∈ Θ | ek∅i ∈ exp(c, t) • c} (36)
• At the current time t , cs will involve no-tions.
n = (∪c∈cs
exp(c, t))(t) (37)
• n will be in one or more layers.
ln =∪x∈n
(layerof x ) (38)
• These layers will precede one or more otherlayers.
pln = {p, pl ∈ Li | pl ∈ ln ∧ pl ≺ p • p}(39)
• Each layer constructs a situation of type Ψthat applies to layers that precede it. Letthe situation constructed at time t for alayer be layersitn.
layersitn : N → τ → Ψ (40)
• Situations that apply to ek∅i at current time
t are applied to give eki at t .
A Ψ can use how an experience came to bewhat it is at t to change what it or anotherexperience is next. This applies to the Sec-tion 3 described models of Shaw and Todd,Beer, Wegner and Goldin, and to the expe-riential descriptions of Dewey. A Ψ cannotuse how an experience came to be what it isat t to change what it or another experiencewas before t . The situation can affect thepresent, it can affect the future, it can affectrecall of the past, but it cannot rewrite theactual past. So there will be some functionf of type (Ei → Ei) such that the part of ekithat extends from time t until time t + δtis f applied to ek∅
i and layersitn(t , pln). Tothis end, let
eki = e
k−i ∪ ekti ∪ ek+
i (41)
where
ek−i ]] ekti ]] ek+
i (42)
tproj (ekti ) = (t , t + δt) (43)
Given these, the current situation appliesas:
∃ f ∈ (Ei → Ei) • ekti = f(ek∅i , layersitn(t , pln))
(44)
8. Kinds of reasoning
Maher and Gero (2002) described three kinds ofagent reasoning: reflexive, reactive and reflective.We can now say what these three are. Notethat, as Rosenschein and Kaelbling (1995) startby describing “pure action” and “pure percep-tion” agents, we need at least two more kindsthat we call senseless and effectless.
senseless ⇔ S = ∅ (45)effectless ⇔ E = ∅ (46)interactive ⇔ ¬ senseless ∧ ¬ effectless (47)

16
(¬ senseless ∨ ¬ effectless)∧ at least one agent process is perturbed by
at least one external process, orat least one external process is perturbed byat least one agent process
⇔ isagent(48)
interactive∧ at least one effection is perturbed by
at least one sensation⇔ reflexive (49)
(interactive ∧ A 6= ∅)∧ at least one action is perturbed by
at least one perception⇔ reactive (50)
(interactive ∧ A 6= ∅ ∧ C 6= ∅)∧ at least one action is perturbed by
at least one conception⇔ reflective (51)
The reason that reactive is not described as(reflexive ∧ A 6= ∅) is because an agent may beboth reflexive and reactive, or it may be reactivebut not reflexive. Similarly, a reflective agent mayor may not be reactive and it may or may not bereflexive. Why is an agent with percepts but notacts called reflexive? Because it is what drivesthe effectors that matters. So why have perceptsin a reflexive agent? To determine the currentsituation and the conjectures for the sensors.
Notice that these conditions are independent ofany kind of implementation. Systems describedby this document could be implemented in an im-perative or declarative or object-oriented or func-tional language, or with neural networks, or evenin hardware: anything that satisfies the descrip-tions here.
Now reflexive reasoning is described as beingof an interactive agent where “at least one effec-tion is perturbed by at least one sensation”. Ef-fection and sensation are of effectors and sensors
respectively. So this condition will hold when thebehaviours of an effector x without any sensorsare different to the behaviours with at least onesensor y present. That is, when there is a sensory that perturbs that x .
Let perturbs(x , y) be true if construct x is per-turbed by construct y . That is, if an experienceof x overlaps an experience of y .
perturbs(x , y) ⇔ ∃ ex , ey ∈ E; t ∈ τ •
ex ∈ exp(x , t) ∧ ey ∈ exp(y , t) ∧ ex © e
y (52)
Given perturbs(x , y),
reflexive ⇔ interactive ∧ (∃ x , y : ΘC •effector(x ) ∧ sensor(y) ∧ perturbs(x , y)) (53)
reactive ⇔ interactive ∧ A 6= ∅ ∧ (∃ x , y : ΘC •activator(x ) ∧ perceptor(y) ∧ perturbs(x , y))
(54)
reflective ⇔ interactive ∧ A 6= ∅ ∧ C 6= ∅ ∧(∃ x , y : ΘC •activator(x ) ∧ conceptor(y) ∧ perturbs(x , y))
(55)
The space of concepts is C ⊂ N . The space ofpercepts is P ⊂ N . The space of acts is A ⊂ N .The space of sense-data is S ⊆ N . The space ofeffect-data is E ⊆ N . Why are concepts C ⊂ Nbut sense-data S ⊆ N ? An effectless agent mayonly have sense-data, meaning that S ⊆ N . Anagent with concepts will be interactive, meaningthat S ∪ E 6= ∅. Hence it is possible to have anagent with only sense-data but it is not possibleto have an agent with only concepts.
Reflective construction of particular notionsmay eventually lead to reactive reasoning oversimilar notions if that refection recurs sufficiently.This is non-associative adaption to continuity ofexperiences, and it is often called habituation.Reactive reasoning may similarly lead to new re-flexive reasoning. The idea of habituation is notnew; James (1890), for instance6:6Emphasis in the following is by James

17
“When we are learning to walk, toride, to swim, skate, fence, write, play,or sing, we interrupt ourselves at ev-ery step by unnecessary movementsand false notes. When we are profi-cients, on the contrary, the results notonly follow with the very minimumof muscular action requisite to bringthem forth, they also follow from asingle instantaneous ‘cue.’ ”
“In action grown habitual, what insti-gates each new muscular contractionto take place in its appointed order isnot a thought or a perception, but thesensation occasioned by the muscularcontraction just finished.”
As experience is an interplay of continuity andinteraction, habituation of interactive experiencesleads to grounding of notions in such interactions.
9. The finitary predicament
The “finitary predicament” is Cherniak’s(1986) name for the boundedness, spatially andtemporally, of computation in an agent. Cherniakis actually only discussing humans but any agentacting in real time is computationally bounded.Focusing the resources of the agent on continuityand interactivity of its experiences is an advan-tage here. It need only focus on projecting itsown interactions into the future and past, ratherthan trying to learn a model of its world.
Even with this focus, computational bounds re-main. Noticing a failure to reach equilibrium aftera perturbation must be bounded in time; updat-ing an experience following such notice must like-wise be bounded. In both cases it is not alwayspossible to consider all implications, agent-wide,of all possible changes. Hence the modularity in-herent in our descriptions of both experiences andconstructs.
The advantages of such modularity are seen inCarpenter and Grossberg (1987) preventing the“relentless degradation of its learned codes by the"blooming, buzzing confusion of irrelevant expe-rience" ”. The solution is to make habituationsubject to an attention mechanism and to the
novelty of events and have it subject to. That is,the learner is distributed and localised, or mod-ular. This also helps when learner stability andplasticity are pulling a learner in different direc-tions.
Not only should there be modularity but mem-ories should age. A particular experience shouldeventually be forgotten even if no similar recentexperiences replace it. This is referred to as ex-plicit ageing. Implicit ageing means replacing ofparts of old memories by newer experiences. Thistakes advantage of the interactive nature of de-signing: as new memories get absorbed, general-isations change and so a later reconstruction ofthe same query results in different memories be-ing retrieved.
10. Conclusions
In this paper we considered what kind of mem-ory a situated design agent should have. We de-scribed an experiential view of memory in a situ-ated agent.
John: obviously more is needed here. Ithought that some of the stuff from yourARC proposal (on why we would want tobuild such an agent) should go here and inthe introduction of part A?
REFERENCES
Allen, JF: 1991, Time and again: The many waysto represent time, International Journal ofIntelligent Systems 6: 341–355.
Bartlett, FC: 1932, Remembering: A Study in Ex-perimental and Social Psychology, CambridgeUniversity Press.
Beer, RD: 1997, The dynamics of adaptive behav-ior: A research program, Robotics and Au-tonomous Systems 20: 257–289.
Beer, RD: 2003, The dynamics of active cate-gorical perception in an evolved model agent,Adaptive Behavior 11(4): 209–243.
Carpenter, GA and Grossberg, S: 1987, Amassively parallel architecture for a self-organizing neural pattern recognition ma-chine, Computer Vision, Graphics, and Im-age Processing 37: 54–115.

18
Cherniak, C: 1986, Minimal Rationality, MITPress.
Clancey, WJ: 1997, Situated Cognition, Cam-bridge University Press.
Dewey, J: 1887, Psychology, Harpers & Brothers.Reprinted in John Dewey: The Early, 1882-1898, Vol. 2: 1887, Southern Illinois Univer-sity, 1969, pp. 3–21.
Dewey, J: 1896, The reflex arc concept in psychol-ogy, Psychological Review 3(4): 357–370.
Dewey, J: 1917, The need for a recovery ofphilosophy, Creative Intelligence: Essays inthe Pragmatic Attitude, Henry Holt andCompany, pp. 3–69. Reprinted in JohnDewey: The Middle Works, 1899-1924, Vol.10: 1916-1917, Southern Illinois University,1985, pp. 3–49.
Dewey, J: 1938, Experience and Education, Col-lier. Reprinted in 1963.
Gero, JS and Fujii, H: 2000, A computationalframework for concept formation for a situ-ated design agent, Knowledge-based Systems13(6): 361–368.
Gero, JS and Smith, GJ: 2006, A computationalframework for concept formation for a situ-ated design agent, Part A: Gero and Fujii re-visited. To submit.
James, W: 1890, The Principles of Psychology,Vol. I, Dover. Republished 1950.
Maher, ML and Gero, JS: 2002, Agent models of3d virtual worlds, in G Proctor (ed), ACA-DIA 2002: Thresholds, Pamona, CA, ACA-DIA, pp. 127–138.
Ohrstom, P and Hasle, PVV: 1995, TemporalLogic: From Anceint Ideas to Artificial In-telligence, Kluwer Academic.
Rescher, N: 2002, Process philosophy, in EN Zalta(ed), Stanford Encyclopedia of Philosophy,Metaphysics Research Lab, Centre for theStudy of Language and Information, Stan-ford University. http://plato.stanford.edu/entries/process-philosophy/.
Rosenschein, SJ and Kaelbling, LP: 1995, A sit-uated view of representation and control, Ar-tificial Intelligence 73: 149–173.
Seibt, J: 2004, Free process theory: Towards atypology of occurrings, Axiomathes 14: 23–55.
Shaw, R and Todd, J: 1980, Abstract machinetheory and direct perception, Behavioral andBrain Sciences pp. 400–401.
Smith, B: 1996, Mereotopology: A theory of partsand boundaries, Data and Knowledge Engi-neering 20: 287–303.
van der Aalst, WMP, de Medeiros, AKAand Weijters, AJMM: 2006, Process equiv-alence: Comparing two process modelsbased on observed behavior, in S Dust-dar, JL Faideiro and A Sheth (eds), In-ternational Conference on Business Pro-cess Management (BPM 2006), Vol. 4102of Lecture Notes in Computer Science,Springer-Verlag. http://is.tm.tue.nl/staff/wvdaalst/publications/z8.pdf.
Wegner, P and Goldin, D: 1999, Models of inter-action. ECOOP’99 Tutorial.
A. Temporal relations on experiences
We can use the function tproj from Section4 to define three primitive relations for tem-poral interval projections of experiences: sum,less than (a temporal partial order that excludestemporal overlap) and follows (temporally im-mediately follows). These are adapted from(Seibt 2004, Ohrstom and Hasle 1995).
e3 = e
1+e2 = ∀ e4 • (e4©e3 ⇒ e
4©e1 ∨ e
4©e2)
(56)
e1 <τ e
2 = ¬ (e1 © e2) ∧ (∃ t1, t ′1, t2, t
′2 •
tproj (e1) = (t1, t ′1) ∧tproj (e2) = (t2, t ′2) ∧max (t1, t ′1) < min(t2, t ′2)) (57)
e1]]e2 = e
1 <τ e2 ∧ ¬ (∃ e3 • e1 <τ e
3 ∧ e3 <τ e
1)(58)
These can be used to define Allen’s (1991) in-terval relations on the temporal extent of expe-riences. The following is derived from (Ohrstom

19
and Hasle 1995).
meets(e1, e2) = e1]]e2 (59)
metby(e1, e2) = e2]]e1 (60)
before(e1, e2) = ∃ e3 • e1]]e3]]e2 (61)
after(e1, e2) = ∃ e3 • e2]]e3]]e1 (62)
equals(e1, e2) = tproj (e1) = tproj (e2) (63)
starts(e1, e2) = ∃ e3 •tproj (e2) = tproj (e1) + tproj (e3) (64)
startedby(e1, e2) = ∃ e3 •tproj (e1) = tproj (e2) + tproj (e3)
(65)
finishes(e1, e2) = ∃ e3 •tproj (e2) = tproj (e3) + tproj (e1)
(66)
finishedby(e1, e2) = ∃ e3 •tproj (e1) = tproj (e3) + tproj (e2)
(67)
overlaps(e1, e2) = ∃ e3, e4, e5 •tproj (e1) = tproj (e3) + tproj (e4) ∧
tproj (e2) = tproj (e4) + tproj (e5) (68)
overlappedby(e1, e2) = ∃ e3, e4, e5 •tproj (e2) = tproj (e3) + tproj (e4) ∧
tproj (e1) = tproj (e4) + tproj (e5) (69)
during(e1, e2) = ∃ e3, e4 •tproj (e2) = tproj (e3) + tproj (e1) + tproj (e4)
(70)
contains(e1, e2) = ∃ e3, e4 •tproj (e1) = tproj (e3) + tproj (e2) + tproj (e4)
(71)
We do not attempt to define equivalent rela-tions on the notions of an experience. Temporaloverlap does not imply experiential overlap:
overlaps(e1, e2) 6⇒ e1 © e
2 (72)
e1 © e
2 ⇒ overlaps(e1, e2) (73)
These interval relations on the temporal extentof experiences are partial orders on experiences.Given the example of Figure 4, we can say thatbefore(a, c), before(a, d), before(b, e), but beforedoes not relate a to b.
time
a
d
cb e
Figure 4. Example time intervals





























