Embed Size (px)
Citation preview
A Community with Autonomous Personal Vehicles
Larry [email protected]
CyCab cybercar in La Rochelle
(Robosoft, France))
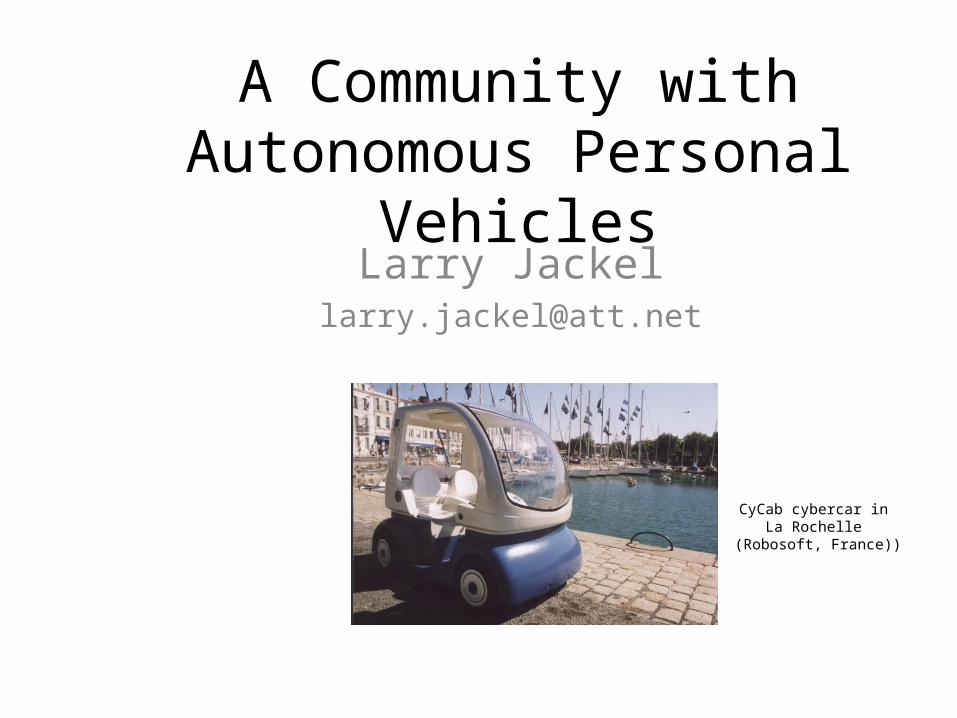
DARPA Challenge EventsGrand Challenge 2004: 150 miles mostly dirt road – No winners – best performance CMU~ 7 milesprimarily required good GPS waypoint following
Grand Challenge 2005 132 miles Stanford “Stanley” winner, CMU 2nd
Mostly waypoint following
Urban Challenge 200760 miles in vacant military baseCMU lead winner, Stanford 2nd
Traffic rules and slow moving trafficGPS navigation, some obstacle avoidance
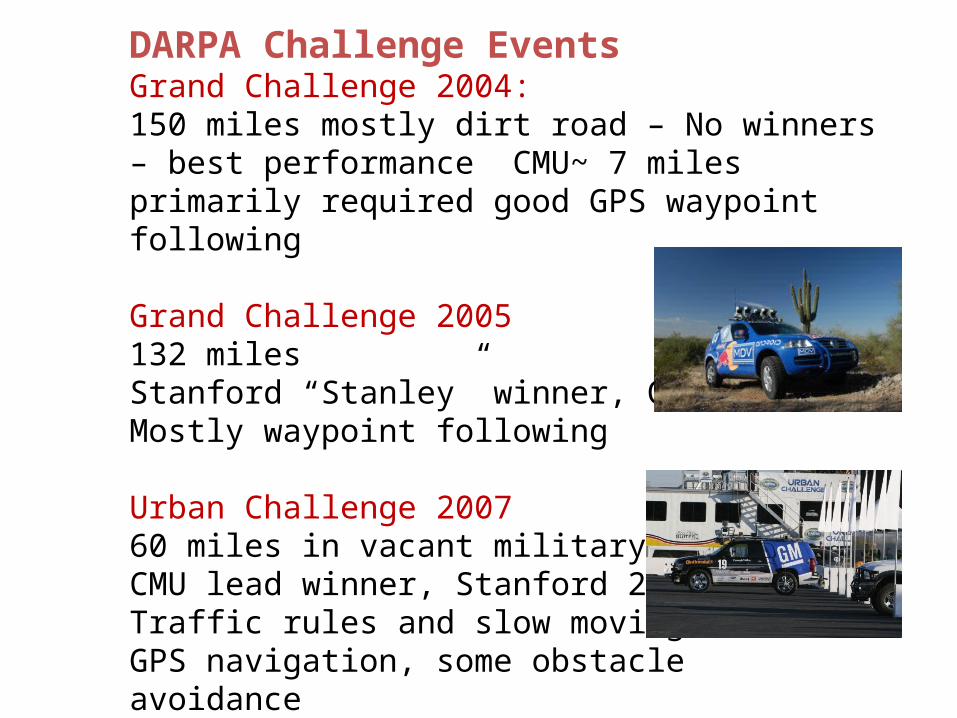
Why now? There is a convergence of forces• Traffic jams are too
costly in fuel and time
• We are running out of space to build new highways – we need to make more efficient use of existing roadways
• Recent events shows the needed technology is within reach– DARPA Urban Challenge
Urban Challenge National Qualifying Event(videoNot so easy
Why can’t we just roll out APVs?
• The technology is still immature –• A protected environment is required
– Fixed infrastructure can greatly simplify the navigation and obstacle-avoidance tasks
A community planned from the ground up for APVs can jump-start deployment. As the technology matures APVs can be released into the larger world.
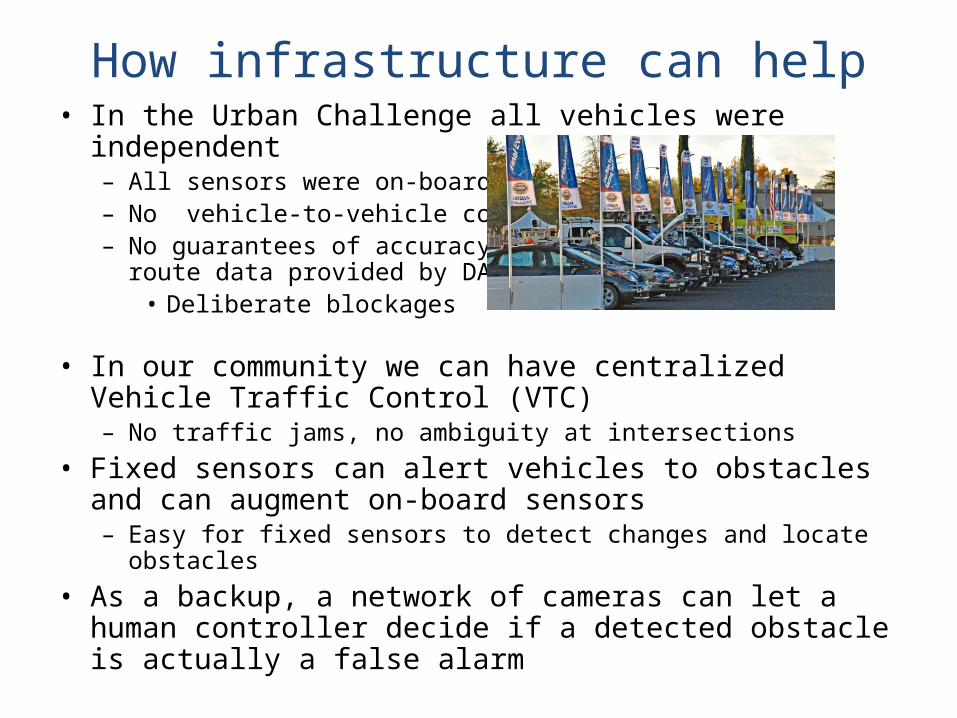
How infrastructure can help• In the Urban Challenge all vehicles were independent
– All sensors were on-board– No vehicle-to-vehicle comms– No guarantees of accuracy of
route data provided by DARPA• Deliberate blockages
• In our community we can have centralized Vehicle Traffic Control (VTC)– No traffic jams, no ambiguity at intersections
• Fixed sensors can alert vehicles to obstacles and can augment on-board sensors– Easy for fixed sensors to detect changes and locate obstacles
• As a backup, a network of cameras can let a human controller decide if a detected obstacle is actually a false alarm
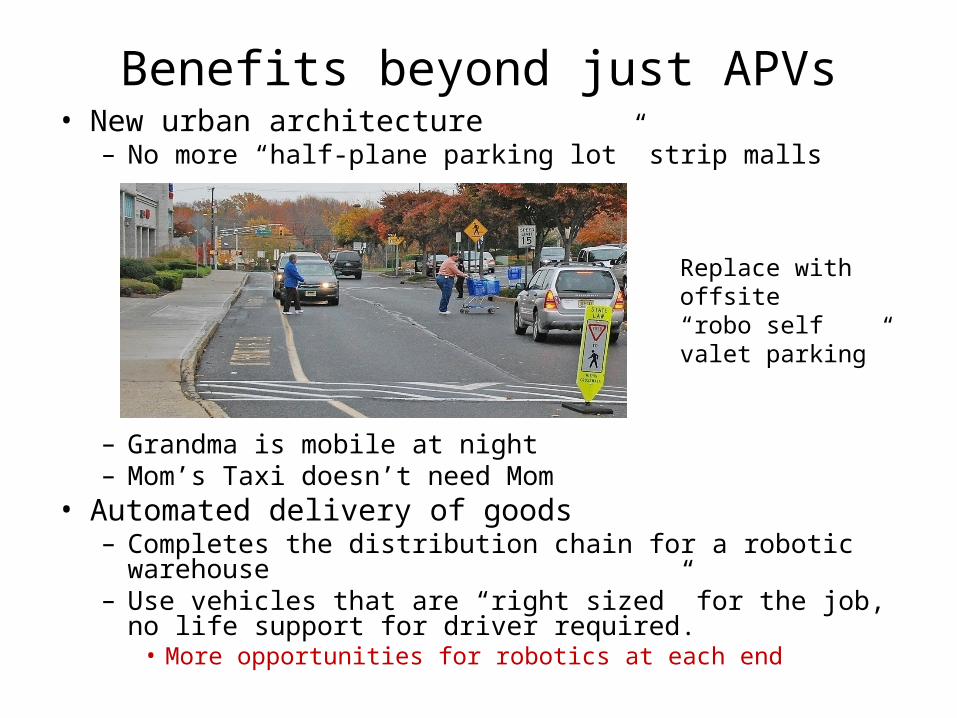
Benefits beyond just APVs• New urban architecture
– No more “half-plane parking lot” strip malls
– Grandma is mobile at night– Mom’s Taxi doesn’t need Mom
• Automated delivery of goods– Completes the distribution chain for a robotic warehouse– Use vehicles that are “right sized” for the job, no life support for
driver required.• More opportunities for robotics at each end
Replace with offsite “robo self valet parking”
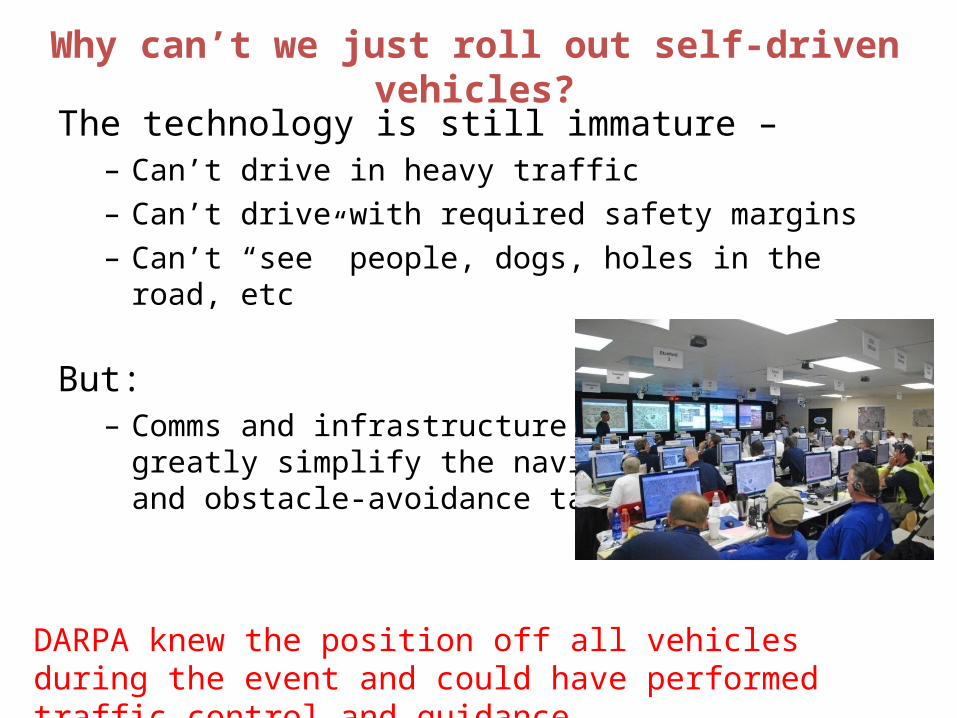
Why can’t we just roll out self-driven vehicles?
The technology is still immature –– Can’t drive in heavy traffic– Can’t drive with required safety margins– Can’t “see” people, dogs, holes in the road, etc
But:– Comms and infrastructure can
greatly simplify the navigation and obstacle-avoidance tasks
DARPA knew the position off all vehicles during the event and could have performed traffic control and guidance
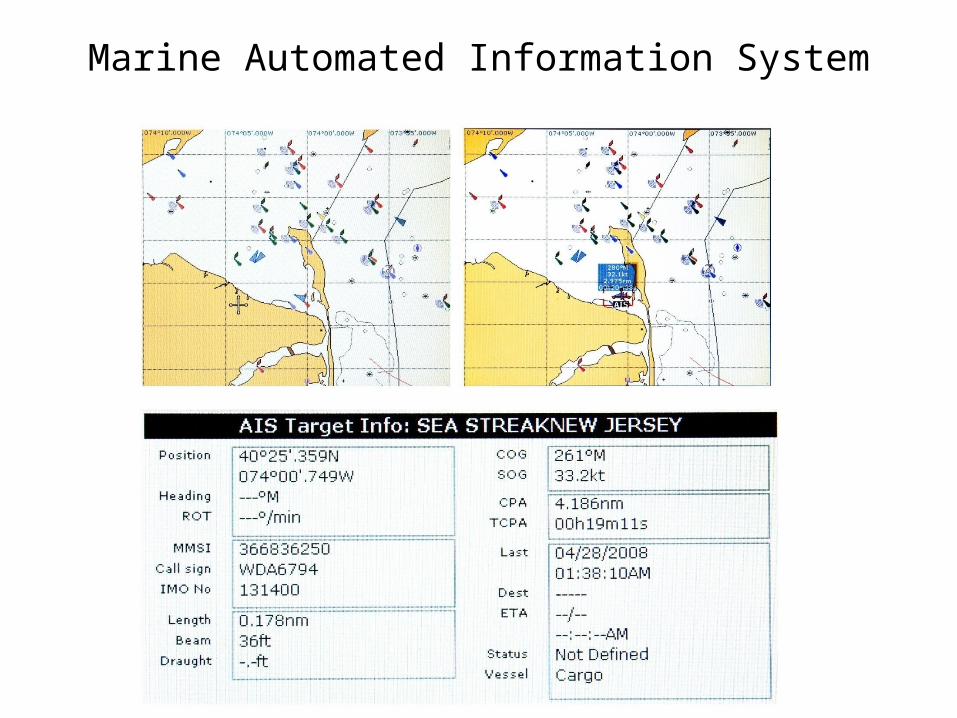
Marine Automated Information System
How infrastructure can help• In the Urban Challenge all vehicles were independent
– All sensors were on-board– No vehicle-to-vehicle comms– No guarantees of accuracy of
route data provided by DARPA
• Deliberate blockages
• Fixed sensors can alert vehicles to obstacles and can augment on-board sensors– Easy for fixed sensors to detect changes and locate obstacles
• As a backup, a network of cameras can let a human controller decide if a detected obstacle is actually a false alarm
Next Steps for Research
• Detect moving obstacles in unstructured environments (animals, other vehicles)
• Detect people (moving and non-moving) in all poses
• Scalable Vehicle Traffic Control Model
• Vehicle-to-vehicle comms and vehicle-to-infrastructure comms – with service guarantees in heavy traffic
Need Standards and APIs NOW so that the fleet will be ready when the technology arrives
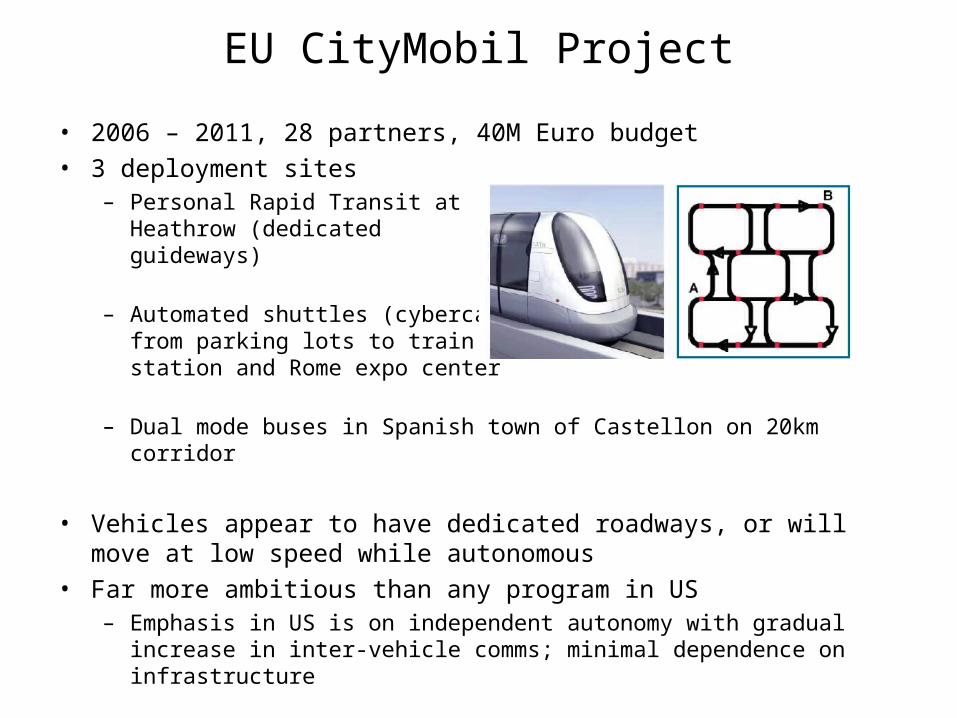
EU CityMobil Project
• 2006 – 2011, 28 partners, 40M Euro budget• 3 deployment sites
– Personal Rapid Transit at Heathrow (dedicated guideways)
– Automated shuttles (cybercars)fromfrom parking lots to trainstation and Rome expo center
– Dual mode buses in Spanish town of Castellon on 20km corridor
• Vehicles appear to have dedicated roadways, or will move at low speed while autonomous
• Far more ambitious than any program in US– Emphasis in US is on independent autonomy with gradual increase in inter-
vehicle comms; minimal dependence on infrastructure













![[RF Communication Release] 2012 - Robosoft Systems · [RF Communication Release] 2012 ... see CC2500 datasheet for details. ... tion using CC2500 based RF modules. Configure the mod-](https://img.pdfslide.us/doc/110x75/5b2cf2d27f8b9abb6e8b92d3/rf-communication-release-2012-robosoft-rf-communication-release-2012-.jpg)