Embed Size (px)
DESCRIPTION
Hip biomechanics
Citation preview

A BIOMECHANICAL INVESTIGATION OF THE HUMAN HIP*
R. D. CROWNSHIELD, R. C. JOHNSTON. J. G. A?iDwwst and R. A. BRAND
Department of Orthopaedic Surgery. University of Iowa. Iowa City, IA 52242, U.S.A.
Ahsrract-This paper describes a biomechanical investigation of the human hip during level walking, while climbing and descending stairs, and when rising from a sitting position. Triads of flashing, light- emitting diodes attached to the pelvis, thigh. shank. and foot are photographed by a biplanar technique to generate kinematic data. Kinetic data IS collected using a piezoelectric force platform. The inverse dynamics problem associated with the three lower extremity segments is solved for the time variations of the intersegmental force and moment resultants at the hip, knee, and ankle. An optimization tech- nique is used to distribute these resultants to the load-carrying structures in the neighborhood of the hip. and to the two-joint muscles that flex and extend the knee and ankle. Typical results for a group of normal volunteers are presented and discussed.
INTRODUCTION
A knowledge of the biomechanical environment of the hip is of considerable importance to health care professionals. A wide variety of relatively common pathological conditions affect the hip joint. The designs of surgical procedures and implants to recon- struct diseased hips can be significantly improved if one has an appreciation of the mechanical environ- ment in which the reconstructed hip must function during gait and other activities of daily living.
The loads transmitted by the hip joint and associ- ated periarticular structures are difficult if not imposs- ible to determine directly during in vim experiments. Rydell (1966) used an instrumented prosthesis to obtain hip contact force values during gait, but these values may not be equal to the forces present in a normal joint. A semi-direct experimental method using electromyography to determine muscle forces has been proposed by Ghista et al. (1976). This method is based on the assumption that the force exerted by a muscle depends exponentially on the time-derivative of the rectified integrated EMG sig- nal. However, until the validity of this assumption is established, and until sufficiently accurate and com- plete EMG data has been collected, this method will remain of little practical value.
Because of these difficulties with direct or semi-dir- ect force measurements, the loads transmitted by hip structures are usually inferred or approximated by in- direct means. The intersegmental force and moment resultants at the joints are determined approximately by modelling the body or parts thereof as a system of rigid links, experimentally measuring the location histories of these segments, and then solving the in- verse dynamics problem associated with this linkage
*Received 17 December 1975. t Department of Materials Engineering. University of
Iowa, Iowa City, IA 52242, U.S.A.
system using kinetic data obtained with a force plate. These joint resultants are then “distributed” to the load-carrying structures in the joint neighborhoods using some simplified representation of joint ana- tomy.
Two distinct procedures have been used to distri-’ bute joint resultants. Paul (1965) used what may be called the “reduction” method to get a bounded or approximate solution to the distribution problem at the hip during gait. This method has also been used by Morrison (1967) to distribute knee resultants in dynamic situations, and by Chao et al. (1976) to dis- tribute finger joint resultants under static conditions. The goal in the reduction method is to reduce an initially indeterminate problem to one that is deter- minate. This method is primarily useful in those in- stances where the actual joint anatomy is very simple, or is known to function simplistically.
An alternative procedure of solving the distribution problem, the “optimization” method, was introduced by Seireg and Arvikar (1973) and Penrod et al. (1974) and was applied to gait. for the first time by Seireg and Arvikar (1975). In this method, it is assumed that the distribution process occurs in such a way as to optimize some kinetic property called the objective function. The proper objective function is not known a priori, so the appropriateness of the function chosen must be established indirectly on the basis of the results obtained. If EMG activity patterns are not used as constraints in obtaining the optima1 solution, then they may be used in this validation process.
Previous indirect biomechanical investigations of hip function have been limited by failure to use com- plete six degree of freedom kinematic data, failure to use consistent and reliable kinetic, inertial property and joint anatomy data, and failure to impose realis- tic upper bound constraints on the magnitudes of the muscle forces during the distribution process. This latter failure leads to the prediction that only a few muscles are active at any particular time, and that

these active muscles exert unrealistically large forces the three activities of daily living examined in this during certain portions of the gait cycle. study usually take place well within these limits,
This paper describes an investigation of the mechanical environment of the hip during activities of daily living. The paper is divided into three major sections. The first section describes the mechanical model used to represent the actual human pelvis and leg. The second describes the methods used in the collection, reduction, and processing of the experi- mental data. A third section presents the results and a discussion of our initial experimental studies to measure the complete kinematic and kinetic quanti- ties about the hip during level walking, stair climbing and descending, and rising from a chair.
Lettingf,(t) denote the bony contact force exerted by the acetabulum on the thigh segment B3 at H, and lettingA( i = 1 , 2,. .27 represent the force act- ing on B3 near H due to the j-th hip muscle, the two vector equipollence equations at H can be expressed in the form
(2)
>lECHANIC.AL MODEL
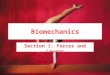
The pelvis and the involved lower extremity are modeled as four rigid bodies; the pelvis segment B4, the thigh segment B,, and shank segment B,, and the foot-plus-shoe segment B, (See Fig. 1). These four body segments are regarded as being connected to each other by smooth but loose ball-and-socket joints at the hip H, the knee K, and the ankle ,-t. The inter- segmental resultant forces (F,, ; F, ; FH) and moments (iv,,; ,q,; fi,) transmitted across these three joints are determined by solving the inverse dynamics prob- lem associated with the motion of the three lower extremity segments.
where f](f) locates the attachment point of the j-th muscle relative to H. These two vector equations con- tain 30 unknown scalars (the 27 unknown muscle force magnitudes and the three unknown scalar com- ponents of the bony contact force).
The forces transmitted by the individual joint struc- tures are calculated from the joint resultants by solv- ing the associated distribution problem. This problem is defined by the six vector equipollence equations that relate the six intersegmental force and moment resultants at the three lower extremity joints to the forces transmitted by the individual joint structures. The simplified model of joint anatomy used in this investigation ignores the hip capsule, replaces muscles by straight line elements between approximate points of attachment, and represents bony articulations by smooth but loose ball-and-socket joints. Attachment point location information was obtained from matched dry bone specimens.
The two-joint muscles that cross both the hip and the knee are the sartorius. rectus iemoris, gracilis. biceps femoris, semitendinosus, and semimem- branosus. Whereas these muscles perform a variety of functions at the hip, they are regarded in this study as all basically acting to flex or extend the knee, func- tioning there in concert with the gajtrocnemius and the vastus. The knee ligaments and articular surfaces are regarded as providing little if any resistance to knee flexion or extension during the activities investi-
At the hip twenty-seven separate musculotendinous units are identified as potential load-carrying struc- tures during the activities in question (see Table 1). Note that the adductor magnus, gluteus medius, and gluteus minimus are each represented by three separ- ate components that can function independently. Each of these muscles is composed of muscle fibers that converge radially at the attachment site (the ori- gin of the adductor magnus and the insertions of the gluteus medius and minimus). The actions of the dif- ferent portions of these muscles have considerably dif- ferent moment effects at the hip. The gluteus max- imus, while a large muscle. is comprised of essentially parallel fibers and is therefore represented by only one element. The hip ligaments are ignored since they constrain joint motion (and therefore transmit load) only near the limits of the range of joint motion, and
Fig. 1. Reference frames used in the model of the lower extremity: L--laboratory reference frame, S-skewed refer- ence frame of external markers (LEDs). and R--embedded
reference frame of bony landmarks.
76 R. D. CROWXXSHIELD. R. C. JOHSSTON, J. G. ANDREWS and R. A. BRAND

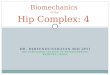
Fig. 2. The time exposure image record by one of two cameras of the flashing LEDs attached to an experimental subject.

.\IUXiZ XX-CS
Glu::us mediuj !antt Glutecj medills !midr Glureus mrdius !poj:r Glutrus minimus iant) Glur:us minimus !midi Glutcuj minimcs {port] Tenso: iaxiae latae Xddusror bre\is Adductof iongus Adductor magnus lam) Adductx magnus (mid) Adductsr magnus (post\ Pzctinzils Genzlius inferior Gemzllu~ superior Obturator internus Obturator cxternus Piriiormis Quadrarus fsmoris Iiiacuj pl;oas Gluteuj maxima Sartoriuj Rectus kmoris Grxilis Biceps iemoris Semim?mbranosuj Srmitend~nosus Vastus Gastrocncmius SOlW5
gated in this study. The gastrocnzmius muscle. in
turn. is a tuo-joint muscle that also crosses the ankle.
This muscle and the soleus are regarded as providing
essentially all the moment at the ankle causing plan-
tar flexion of the foot. The ankle ligaments and articu- lar surfaces are regarded as providing little if any re-
sistance to either plsntar or dorsiflexion of the foot.
For the purposes of this investigation. the anatomy m the vicinity of the knee and ankle need only be
modeled to the extent necessary to distribute the
resultants at the hip. Accordingly. of the four ad-
ditional vector equipollence equations at the knee and ankle. we consider only the two scalar Rexion-exten-
sion components of the two vector moment equipol-
lence equations. At the knee. the flexion-extension equation takes the form
wher: E, is the unit vector associated with the
medial-lateral Z3 axis of R, embedded in B,. At the ankle. the fiexion-extension moment equipollencs
equation takes ths form
i : .i .u., I ! I -
3’)
L- [i (I) x f (rig .i; 7 j-79 ’ -’ )
’ ‘? j = 0. (II i
wh-rz EZ is ths unit vector associated with thz
medial-lateral 2: axis of Rz embedded in BI.
The dntribution problem at the hip is therefore
reduced to one that is described by the IV.U vector
equipoiiencz equations (1) and (3). together with the
two scalar flexion-extension moment equipollence
equations (3) and (4) at the knee and ankle. respect-
ively. This is a system of eight scalar equations for 33 scalar unknowns. the >O unknown muscle force
magnitudes. and the three unknokw scaiar com-
ponents of the bony contact force at the hip. The m:thod we use to solve this distribution prob-
lem is a modified form of the optimization procedure
originallv proposed by Penrod PI (II. (197-i). \Vc define a linear objective function J(t) of the form
where .-l; is the physiological cross-sectional area of the j-th muscle. The constraints imposed on rhe un-
known scalar muscle forces during the optimization process are chat they must be non-compressive, and
that they must not exceed a maximum allowable value that is directly proportional to the ph+ologicnl cross-jzctional area. Thus, we require that
Q < [_/ii) .A.] $ <i: j = !. 2 .__. 3i. (61
u-here I’ is the maximum allotvab!e iznsiie stress in the muscles. Since there is at pressnt no satisfactor) way to :nc!ude antagonistic muscle acr~vir:~ in the

SO R. D. CROWXSSHIELD. R. C. JOHXSTON. J. G. ANDREWS and R. .A. BRA~;D
solution to the distribution problem, we have simply chosen to ignore it in our investigation.
We define an admissible solution to the distribution problem as a 33 component force set that satisfies the eight scalar equality constraints I 11. (.3), (3). and (3), and the 60 scalar inequality contraints (6). The distribution problem may therefore be stated as fol- lows. Minimize the linear objective function J(r) defined by (5) over the space of all ad,missible solu- tions The particular admissible solution that actually minimizes J(t) is termed the minimal force set S, and it is obtained by standard linear programming tech- niques. Since EMG activity is not used as a constraint during the optimization procedure, it is used indir- ectly to test the validity of the objective function.
The magnitude of the positive upper bound muscle stress constraint 0 in equation (6) clearly affects the size of the admissible solution space. and it therefore has considerable impact on the solution to the distri- bution problem. For sufficiently small values of a, the admissible solution space will be empty and there will be no solution to the distribution problem re- gardless of the choice of J. The smallest value of n for which the admissible solution space is non-empty is denoted by ac. As L( increases beyond ac, the ad- missible solution space increases in size. and the par- ticular choice of J increases in significance.
For our particular linear objective iunction, it is not difficult to show that as a increases beyond ac. the number of non-zero forces in S decreases, while at the same time, the magnitude of the largest force in S increases. Thus, as u increases, we are rather quickly led to a minimal force solution set S which is physiologically unacceptable. In order to prevent this from occurring, we increase n from zero to first find a,, and we then choose the value of R in equa- tion (6) to exceed a, by a fixed percentage of Q~. For the subjects studied in our laboratory, it was found that by choosing a equal to 1.2 ac, a physio- logically reasonable solution S was obtained.
EXPERIMENTAL PROCEDURES
The experimental recording of the spatial position and orientation of each body segment is made pas- sible by biplanar photography of three reference light sources attached to each body segment. The light sources, light emitting diodes (LEDs). are flashed as the subject walks on a walkway while tune exposure images are recorded in each of two cameras. The walkway is equipped with a dynamometer which measures the subject’s floor reaction force syn- chronously with the flashing of the LEDs. A typical camera image of one gait cycle is shown in Fig. 2.
l Graf Pen model GP-2. Science ,\ccessories Corp., Southport. CT.
i Multicomponent Measuring Platform, hiode 9261X, Kistler Instruments, AG., Winterthur. Switzerland.
The intersection of the optical axes of the two cameras defines the origin of a right-handed ortho- gonal laboratory reference frame (.L). The positive X-axis of 15 is in the direction of w& the positive Y-axis is directed vertically upward, and the positive Z is directed laterally. The images and reference LEDs on the photographic film of each flash of each LED are located in terms of their planar film frame coordinates by a sonic digitizer*. The determination of the coordinates of an LED image point in the
laboratory reference frame (L) from the two camera film images is accomplished in a manner similar to that reported by Miller er a!. (1973). Tests of the accu- racy of locating points in L indicate that the X and Y coordinates in L are determined to an accuracy of $0.25 cm while the accuracy of determining Z is iO.5 cm.
To determine the position and orientation of each body segment in L, one must first determine the pos- ition and orientation of each triad of LEDs. To do this a skewed reference frame (Si) is defined relative to each segment’s LED triad. Since the position and orientation of each Si is obtained from the three dimensional location of the LEDs in L. the position of a body segment, defined by the embedded reference frame Ri, can be obtained by referencing, through orthogonal X-rays, anatomical bony landmarks on the segment to the corresponding St. The embedded reference frame Ri is assumed to be rigidly fixed rela- tive to the external skewed reference frame, Si. Figure 1 illustrates the relationship between the laboratory reference frame, L, the skewed reference frames, Si, and the embedded reference frames Ri.
The anatomical descriptions of joint motion (flex- ion-extension, abduction-adduction. and intemal- external rotation) are readily determined from the relative motion of the embedded reference frames. The Euler angle rotation of two adjacent embedded reference frames about the Z axis (I$) defines a joint’s flexion-extension motion, rotation about the X axis (6) defines abduction-adduction, and rotation about the Y axis (4) defines internal-external rotation.
Each body segment is modeled as a rigid body and as such has a mass center Gi fixed relative to its Ri and Si. The approximate location oi Gi and the ap- proximate mass of each segment is determined by the regression equations provided by Clauser (1969). Data provided by Chandler (1975) permits the calculation of the principal moments of inertia for each sement. Anthropometric measurements are made on each sub- ject to. peimit the estimation of the segment mass and inertia properties from the published data.
The previously described geometric relationships between the Ri, Si. and L permit the calculation of
the displacement history of the mass center Gi of each body segment. Numerical double differentiation of the mass center displacement history produces the corre- sponding velocity and acceleration.
Centered at the origin of the laboratory reierence frame is a floor plate dynamometer+. This device

A ~kjmechanicd investigation af the huimn hip 3:
H.S. TO. H.S.
Fig. ?. The flexion-extension patterns for the hip. knee, and ankle as determined from the Euler angles of adjacent embedded reference frames. Data from one subject col-
lected during two test sessions.
measures the three orthogonal components, corre-
sponding to the axes of L, of the foot’s reaction force.
the location in the horizontal plane of the resultant
of the applied vertical force distribution, and the
moment in the vertical direction about the resultant. During the experiment these analog force channels
are monitored and synchronized with the LED Rash signal by an on-line PDP-12 computer.
The kinematic. kinetic, and body segment par-
ameter data are combined in the Newtonian model to calculate the theoretical resultant joint forces and moments during the various activities. The linear pro- gramming scheme is then used to distribute the joint resultants to the muscles in the model. Once the
muscle forces are known. the joint contact forces can be rstimated. Each of these quantities is routinely cal-
RESULTS AND DISCCSSIOS
Variations in the recorded kinematic and kinetic
characteristics of gait for multiple strides cf one sub-
ject or multiple strides from a number of subjects
result from errors introduced by the data collection
and analysis techniques as well as true bioio$cal and mechanical v-ariations. .Accurate determination of hip joint contact force and individual muscle force is
dependent on an accurate estimation of hip joint
resultant force and moment. The accuracy of deter-
mining hip resultant moment is largely dependent on
the accuracy of determining the location of the body
mounted LEDs in the laboratory reference frame and on the accuracy of thr radio-graphic determination of
0.151 x COMPONENT
,
Y COM30NENT : I
0.2
0
-0.2
-0.4
-06 I
-0.8
0.10 1
Z COMPONENT : I
I-IS. T.O. I-IS.
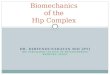
Fig. 1. Hip joint resultant force in the embedded pelvic reference frame, R+; positive X is anterior, positive Y is vertical. and positive Z is lateral. Data from ene subject
culated for each gait or activity cycle. collected during two test sessions.

YZ R. D. CROW~SHIEID. R. C. JOHXSTOS. J. G. &.DREWS and R. A. BRAND
X COMPONENT
test sequence
- 0.05 J H.S. -LO. H.S.
Fig. 5. Hip joint resultant moment in the embedded pelvic reference frame, R,. Data from one subject collected dur-
ing two test sessions.
the joint center location relative to the pelvic LED
array. Tests of this system have indicated a consistent
determination of hip resultants with an error of no
worse than SSY,. The recording of multiple strides of one subject
during one experimental session will demonstrate the combined effects of true stride-to-stride variation in gait mechanics and variations due to experimental error. Retesting of a subject during a different experi- mental sequence will point out variations inherent in the placement and coordination of the cameras, radiographic measurements and placement of the seg- ment arrays.
As a demonstration of this system‘s reliability, mul- tiple strides for five normal subjects were recorded during two different experimental sessions. Presented in this paper’are data from five gait cycles for a typi-
cal twenty-&e year old normal subject of 69 kg body mass collected during each of two different experi- mental sessions {See Figs. 3-6). The waIking velocities
in all tests were within the range of 0.95 to 1.05 m, sec. Figure 3 indicates the ability of the system to repeat-
edly measure the sagittai plane displacement historics
of the body segments. Calculared values of the resul-
tant joint forces and moments are shown in Figs. 4
and 5. The greatest scatter occurs in determining the
abduction-adduction moment (u-component) which is
dependent largely upon the ability to measure dis-
placement along the I axis of L. In Fig. 6 the three
components of the pelvic contact force have been plotted. The authors feel that this data indicates that
the method described produces reasonably repeatable
kinematic and kinetic results.
Figure 7 shows the distributed muscle activity for
, X COMPONENT test sequence
w2J W
I., Y COMPONENT
11 I
I I
2 COM?ONENT j I I
0
H.S. T.O. H.S.
Fig. 6. Hip joint contact force in the embedded pelvic reference frame. Data from one subject collected during
two test sessions,


R. D. CRWY~SHIELD. R. C. JOUXSTOY, J. G. .~~WREWS and R. A. BRAXD
2.37 X COMPONENT
Y COMPONEN
a5
1 Z COMPONENT ;
I
T.O. H.S.
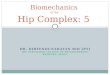
Fig. S. Joint contact force at rhe hip during gait in the embedded pelvic reference frame, R,, for three gait cycles
from each of four normal subjects.
0.5 m/set. The greatest loads, as might be anticipated, occurred during stair climbing where the resultant was well oter seven times body weight. This is con-
siderably more than the peak loads predicted during level walking. When rising from an armless chair (seat height of 0.41 m) negative vertical loads were pre- dicted in the early portion of the cycle. This is because the subject leaned so far forward the femoral contact force would have been pushing against the acetabu- lum in the minus Y direction of the pelvic embedded reference frame.
In the cases of stair climbing and rising from a
of progression) were roughly two to three times the corresponding forces during level walking. This force affects the amount of torque which is transmitted to
the bone cement inrerfacz of a hip prosthesis and may
be related to prosthesis loosening.
The linear programming distribution of rhe hip resultant moment to muscle elements in the anatomi-
cal model is at best only a reasonable analytical
approximation of a complex physiological system.
The theoretical basis for distributing loads to hip
muscles and for calculating the hip joint contact force is the most difficult portion of the entire analysis
X COMPONENT
i I
Y COMPONENT i
i! COMPONENT j
Fig. 9. Joint contact force at the hip in the embedded pel- vic reference frame. R,. for one subject ascending stairs.
descending stairs. and rising from a chair. chair. the peak forces in the _I’ direction (direction

A biorxchanical inves:igaxion of the huma:: h:p ;:<
to verify. Direct experimental measuremsnt of joint
contact force ii: Cic0 has iGZ:l)- been perfoimed XXI
by !hz nature of the measurement can only be per-
formed in abnormal joints. Rl;de:l 11365) measured
hip contact force in two subjects utilizing an insrru- mznted prosthesis. The subjects. walking with noted
kinematic and kinetic abnormalities and attenuated
vertical floor reaction forces, wre reported to hate generated contact forces from 1.6 to 3.3 times their
body weights. The estimation of hip contact force
reported in this paper for a normal subject during gait varies from 3.3 to 5 times the subject’s body
weight with the average of ten gait @es being 1.3
times the body weight. The joint contact force pre- dicted by this method in a normal subject appears to be consistent with Rgdell‘s measurement in abnor-
mal sublects. since one might reasonably qect the
forces in a pain-free normal joint to be greater than
in a prosthetic joint vcith attenuated rioor reaction
forxs.
The method and data presented demonstrate the
use of a system which can be used to calculate the
muscle and hip joint contact forces during activities of daily living. Such information is essential to design
surgical procedures and implants which must uith-
stand the relatively large loads about the hip over
long periods of time. This data suggests that thz loads are larger during gait than some of the earlier litera-
ture suggests and that the loads during other activities
may be higher overall. or higher in some directions than previously suspect4.
clcknu,vlrdg~nlrtit-This research was supported in part by Grant 30. ASI 14436 ot’ The Sational Institutes of Health.
REFERESCES
Chandler. R. F.. Ciawr. C. E. and SfcCon~ilk H. !.I. 11375) Inrestigation oi inertial prsperties of ik human
body. DOT HS SO!. :X. Chao, E. I’. Opgrande. J. D. and Axmzar. F. E. I!3761
Three-dimznsiona! force analvsis of !inzer joints In selecrzd isome!ric hand functions. J. Bi~.wtw~i:::-;r;l~s 9, 387-396.
Clauser. C. E.. MsCon~iiis. J. T. and Young. J. KY I 1363\ Weight. tolumz. and center of tn.153 of segmezis oi the human bode. Air Force Systctns Command. Lvr?ght- Patterson .Air Force Base. AD-710. 621.
Ghista. D. 5.. Toridis. T. G. and Srinivasan, T. I\[. I 19-h) Human git analgis: determination oi inst.?xian2ous joint reactive forces. muscle forces. and the st:rss disrri- bution in bone sepm<nts-11. Blunwii:O~sci;t~ Tt,:i:;~:k 21. 3.
Hag. J. L.. t[ann. R. A. .tnd K;2k:. C. 5%‘. 113-‘:i %orrn.:i electromyographic data. Shrinzrs Hospitai for C:ippkd Children. YOl 19th Avenue. San Francisco. C.4.
&filler, D. I. and Petak. K. L. 11973) Three-dizenslonai cinematography. k’!r:rsioioyJ [!I. V+‘ashingtsr.. D.C. *American .Association of Hea!tk. Ph>-sical Ed*xcation. and Recreation. pp. !&19.
Morrison. J. B. ( 19671 The forces transmitted bv the human knee joint during xtivity. PhD thesis, cn;\ersit)- oi Strathclyk C.K.
Paul. J. P. I 1963) BIo-rngineering studies of t’3e forces transmitted by joifits: II. En&wing anal!s;s. Siotw &nics ark! I;r!o:<l Bin-Enyinerriny Topics (edited b! R. 11. Kenedii pp. 36%350. Pqamon Presi. Oyiord (Proceedings of a S::mposium held in Glasyan, Sep- tzmber, 1961.1
Penrod. D. D., Daly. D. T. and Singh. D. P. t19-;I .~n optimization ~~pproxh to tendon force ana!ys;j. j, Big.)- mrciwti~~~ ?, 123-:29.
Rydril, Y. ‘A’. 119661 Forces acting on the fem+r~! head prosthesis. .I;:,; wr;:q_ SC~VI~. S!@ 88.
Ssireg. A. and Xrvikar. R. J. (1973) .A mathema::<a: model for evaluation of farces in lou-er estremities 0;‘ :‘ks mlls- culoskeletai s:.stzm. J. Biomechunic.s 6, ?I?-325
Seireg. A. and Arvkar. R. J. (1975) The prediction. of mus- cular load sharing ant! joint forces in the iower exvsmi- ties during walking. J. Biomrchonics 8, S9-102.