-
-- -
.-
TI-191 REPORTS HOLDINGS LIST INFORMATION -
1 REPORT NO. 2 CLASSIFICATION
,(,j00 - - 1499-00
-
DISCLAIMER
This report was prepared as an account of work sponsored by
anagency of the United States Government. Neither the United
StatesGovernment nor any agency Thereof, nor any of their
employees,makes any warranty, express or implied, or assumes any
legalliability or responsibility for the accuracy, completeness,
orusefulness of any information, apparatus, product, or
processdisclosed, or represents that its use would not infringe
privatelyowned rights. Reference herein to any specific commercial
product,process, or service by trade name, trademark, manufacturer,
orotherwise does not necessarily constitute or imply its
endorsement,recommendation, or favoring by the United States
Government or anyagency thereof. The views and opinions of authors
expressed hereindo not necessarily state or reflect those of the
United StatesGovernment or any agency thereof.
-
DISCLAIMER
Portions of this document may be illegible inelectronic image
products. Images are producedfrom the best available original
document.
-
I . .- . 1-/ .'2r.. : ..·IC.,I .... 91 1 ., :f . 4'3"886-14327
051 ·. f 4I.
*VE .S·Repor*»No. 221
....
MASTER
'- 1 't: 40 .*4 ..-./....:
< bNUMERICAL INTEGRATION OF STIFF ORDINARY
B DIFFERENTIAL EQUA#IONS
by
C. W. Gear
January 20, 1967
.
/9,00-- 0= 09 $- Ots- coo B*
[iliZNI*lhmE BiliTY#ip;Wip ' A- o RINNF 'INN ®13 o [11ITE' *
,IllfNB B
p0
0.
6
1
.
PATENT R-'/1- 'w Ar:p::07*.s RELSASE. PROCEDURESGOVERN!NG PA;LNT
REVIEW AND RELEASE ARE ONEILE lit REQEIVING SJAGILOIL DlSIKIBUTION
01; THIS DOCUMEN'1119 UNURn'm
--J.
-
-li - ---I WW W----Ii----Il------
LEGAL NOTICEThis report was prepared as an account of
Govemdent sponsored work. Neither the United
States, nor de Commissjon, norany person acUng o behalf of the
Co
mmission:
A. Makes any warranty orrepresentation, expres'sid or implied,
with re
spect to the accu-
racy, completeness, or u/efulnesa of the informatio contained in
this report, o
r unt the use
of any Information, apparatus, method,or process dleclosed in
this report In
ay not infringe
privately owned rights; or I
B. Assumes any linbilittes with respect to the uie of, or for
damages resulting
from the
upe of any information, apparatus, method, or process
disclose
d in this report.
As used in the above. "person acting on behalf of the
Commission" includ
es any em-
ployee or contractor of the Commission, or employ6e of such
contractor, to th
e extent that
such employee or contractor of the Commission, or employee of
such contra
ctor prepares,
dissemjnates. or providei access to, any information pursuant to
his emplo
yrnent or contract
wlth the Commission, or his employment with such contractor.
CFSTI PRICES
Report No. 221
iLa $3 00 1 MN, GS- 1
NUMERICAL INTEGRATION OF STIFF ORDINARYDIFFERENTIAL
EQUATIONS*
by
C. W. Gear
: cr,EAR -79--- ...&.b i--0 Jzarl ABSTRI .%-
bit
January 20, 1967
Department of Computer ScienceUniversity of IllinoisUrbana,
Illinois 61801
*This work was supported in part by AEC-(11-1) -1469 and in patt
by theArgonne National Laboratory, Applied Mathematics
Division.
PATENT R-v!:-W A:'P:NOVES RELEABE. PROCEDURESGOVERNING PATENT
REVIEW AND RELEASE ARE ONRLE I.LY REQE,ivING SESTION,a OBMMUTION OF
TRI9 OUCU (ERit 19
ONOWTEW
-
CONTENTS
ABSTRACT Page
1. The Physical Problem . . . . . . . . . . . . . . . . . . . .
. . . . . 1
2. The Numerical Problem . . . . . . . . . . . . . . . . . . . .
. . . . 2
3. A Simple Error Analysis . . . . . . . . . . . . . . . . . . .
. . . . . 3
4. A Theorem of Dahlquist . . . . . . . . . . . . . . . . . . .
. . . . . 5
5. The Region of Stability . . . . . . . . . . . . . . . . . . .
. . . . . 5
6. Stiffly Stable Methods . . . . . . . . . . . . . . . . . . .
. . . . . 7
7. Another Difficulty - Corrector Iteration . . . . . . . . . .
. . . . .1 0
8. Practical Considerations - Starting and Step Changing . . . .
. . . .1 4
9. Finding Stiffly Stable Methods . . . . . . . . . . . . . . .
. . . . .1 6
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . .
. . .1 8
Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . .1 9
LIST OF FIGURES
F i g u r e l. . . . . . . · · · · · · · · · · · · · · · · · · ·
· · · · · 1
Figure 2. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 2
Figure 3. . . . . . . . . . . . . 6
Figure 4. . . . . . . . . . . . .1 1 1 1 1 1 1 1 1 1 1 1 1 1 1'
. .8Figure 5. · · · · · · . . . . . . . . . . . . . . . . . . . . .
. . . 9
-
ABSTRACT
Stiff equations are ones in which there are rapidly decaying
com-
ponents which are of no interest because. of their small
magnitude. Equations
of this form frequently arise in physical equilibrium problems
such as chemical
or nuclear reactions where there are many components with a
large range of time
constants. Although the rapidly decaying components are of small
magnitude,
they cause severe numerical problems in most general purpose
integration methods.
This note will examine the cause of these problems and propose
some ways around
them. Some specific methods are developed, but the investigation
of classes of
methods remains to be done.
-
r-i
1. The Physical Problem
Consider.the one parameter family of functions
Y(t) = ce + F(t) (1.1)-At
where X is fixed and c is the parameter. The family is the
solution of
y'(i) = -1(y-F(t)) + m (t) (1.2)dt
If k (assumed real for the moment) is >>0, the family
(1.1) all tend to F(t)
very rapidly as t increases.
Y(t) A other members of family
&10:-3-
F(t
l. . I
t
Figure 1
The initial Falue problem for (1.2) for increasing t is
therefore very stable.Large initial errors are damped out very
quickly. ,.
This simple example will· be treated in the sequel to clarify
the pre-
sentation, but the methods to be discussed are equally
applicable to systems of-At
non-linear equations as to single linear equations. The term ce
can be
thought of as representing the local behavior of one of the
error terms. 'The3fnumber -1 .is, of .course, .an eigen value of
the matrix 3F.if f is a vector valued . ..
function of the n component vector y which represents the
differential system.by
y' = f(t,y) (1.3)
Therefore k must be allowed to assume complex values in the
discussion. The
time constants are + Re(x) · They are only defined for decaying
solutions
-1-
-
such that 3-Re(A) > 0. We will assume that F(t) is a well
behaved function with-At
a moderately sized derivative in relation to e
2. The Numerical Problem
dF(t)If F(t) is a smooth enough function such that 4 - could
nor-dt dtmally be integrated with a step size h , one would hope
that equation (1.2)
would have the same property. Unfortunately not: Most methods
require that
h be chosen so that |hAI is bounded by a small number. The
actual bound depends
on the method, 2 is not untypical. This means that h.has to be
chosen to see-kt
the finest structure of the solution due to terms like ce ,
although these
components may be completely insignificant. (They will almost
never.be zero
because of rounding and truncation errors. )
Thtse restrictions occur both in Runge-Kutta and multistep
methods.
We will restrict ourselves to multistep methods in this
discussion after an
example of the common method, Euler's method. It illustrates the
problem very
simply and pictorially.
y(t) AYn+2
F(t)
1 11111
Yn | | i l l€n 1
I l l1111 1Yn+1 1 1
'€n+2
l i l I1 Ii
tn tn+1 tn+2 1 1
.
tn+3
Figure.2
-2-
-
Suppose the numeriBal solution has reachbd (tn' yn) with an
error En from.the
true solution F(t) shown in Figure 2. Euler's rule piojects the
numeridal solu-
tion along the tangant, arriving at (tnfl' yn+1) and so oft to
(tn+3' n+3 3
each error growing in magnitude. Mathematidally, we have
n+1 = n + h Y'(tn' yn)
Suppose F(t) = 0 so that
yl = -Xy
Then yntl = Yn - Ahyn = (1 - Ah)yE
Thus if 1-Ah < -1 or Ah > 2
| ntl | ) |yn|'
and the process is unstable.
Of course, nobody uses Euler' s inethod in oidinary differlntial
equa-tions--but the problem will arise in iii'Bat methods. The
reason that it alises
can be seen very easily in the above exam0le. The true relation
of yn+1 to yn is
yA+1 = (1-Xh) yn
-AhThe accuracy with which 1-Ah approximated e determines the
accuracy of the
method. For Ah < 0, the growth rate of the differential
equation is larger than
that of the difference equation, for 0 < Ah < 2, the
differential and the dif-
ference equations are stable, although the difference
representation is "rela--Ah
tively unstable" (Hamming' s term) .when Ah > 1 + e , since
then |1 - Ah| >|e-xh I . If kh > 2,. then |1 - kh| > 1 and
the difference mathod is unstable.
The stability of the differdnce equation depends on Ah. The
usual
asymptotic analysis considers only the case h + 0, but the
problem is to per-
form the integration with a reasonably sized h.
3. A Simple Error Analysis
Multi-step methods are usually written in the form
rk kaO Vn+1 = - S ai yn+1-i + h s B y' . (3.1)
Li=1 i=0 1 n+1-id
-3-
-
where ao 4 0 and lak' + 'Bk| 0. If Bo 4 0,the method is called
implicit
because, for the non-linear equation y' = f (x,y), n+l appears
on the right
hand side in YA+1' otherwise it is called an explicit method.
The coefficients
aI and Bi are chosen to make the method accurate in the sense
the value of yn+11calculated from (3.1) does not differ from the
exact value of y (t ) by v
eryn+1
much when the {y | i = 1, 2, .. k} are the exact values for a
class ofn+1-i
functions y (t). This difference is called the truncation error,
defined as
k
T (y, tn, h) = E (aiy (t ) + hBi y, (t .)) (3.2)n+1-i
n+1-ii=0
with a = 1.0
Consider equation (1.2) with solution (1.1). Define the
difference between the
calculated values yn and the true values y (tn = F (tn = Fn as
En = yn - Fn'
By (3·1) a v = - Ea v -hI0 n+1 i -n+1-i YA+1-i
k k
0 (F+€ ) = - Ea. (F +€ ) -hE Bi (-A.(Fn+1-i + En+1-i -
Fn+1-i)n+1 n+1 , n+1-i n+1-i1 + 0
+ F' .)n+1-i
k -
S (ai - hABi) En+1-i + T (F, tn, h) =0 (3.3)
0
Therefore the errors En obey an inhomogeneous k-step difference
equation whose
inhomogeneous term is the truncation error for the
exactsolution. Since F is
assumed to be well behaved, this can be assumed to be small for
reasonable
methods, it is not influenced by the presence of rapidly
decaying terms.
It is necessary to bound the solution of the inhomogeneous
difference. .[2]
equation (3.3). This is done in all of the standard texts. (e.g.
Henrici
Discrete Variable Methods in Differential Equations.) It depends
on the sta-
bility of the corresponding homogeneous equation which arises
when T is set to
zero. The difference equation is stable if and only if all roots
of the poly-
nomial equation
(ai - hABi) Ek-i =0 (3.4)
0
are inside the unit circle or on the unit circle and simple.
-4-
-
Asymptotic theory considers the ease hA = 0 only. If stiff
equations
are to be integrated with large h, then large values of hA must
not make (3.4)
unstable. Since there may also be componerits.with large time
constants (small
X), small values of hk must not make (3.4) unstable either. One
root of:(3.4)hk
must approximate e for values of hk for which accuracy is
required,.the other
roots must be small
4. A Theorem of Dahlquist
The order p of. a multiatep method is defined as the highest
degree
of polynomial functions y for which T (y, t, h) vanishes
identically in t and
h. Since the truncation error is then of the form
h P+1 k (Yb t, h)
where k=0 (1) as h- *O,i t i s Usually desirable to make p
large. Dahlquist[1]
has shown that if (3.4) is to be stable for all X such that Re
(hk) 0 (all
stable equations) then P < 2. He also showed that the "best"
method is thetfapezoidal rule (with p = 2). This is a negative
result that appears dis-
couraging. However.,. let us examine the requirement Re (hk·) )
0.
5. The Region of Stability
The roots of (3.4) are to be small, except that one root must be
close-hA
to e for those values of hA for which accuracy is necessary.
However, they
cannot be bounded·everywhere except in trivial cases, in which
case the
method cannot be accurate. Therefore we must ask "for what
regions of the hk
plane is stability necessary and for what regions is accuracy
necessary]"
Consider first the region where Re (hk) )D>0. In this
region-At -Ah,
the term ce is reduced by |e I in magnitude in one step of size
h. Now
|e-Ah I S e-D, so if D is chosen so that e- is insignificant at
the accuracywe are interested in, then we are not interested in
accurate representdtion of
this term, only in stability of the difference equation. For Re
(hk) < D we
may also be interested in accuracy. Suppose that hA =x+ iy. In
one step-At -iythe term ce dhanges by e-X e . Thus, in addition to
a magnitude change
of e x,i t oscillates Z- complete cycles. For x
-
values at points with a spacing of h. It is impossible to
represent a band
limited function with less than two samples per cycle of the
maximum frequency
present, and in practice, 6 to 10 samples per cycle are needed
for any sort of
accuracy. Therefore, if x < D, we must arrange that L < 8
where e is smaller2Kif higher accuracy is required. Typically e
will be around 1/5. If the solu-tion is growing (x < 0), then
the step size must be chosen small enough to pro-
vide sufficient points on the curve, so that x must be limited
below by some
number -a, where e' is the maximum ·amount of growth to be
allowed in one step,-hk
Inside the region D 2 x 2 -a, e 2 y 2 -8, accurate
representation of e by one
root· of (3.4) is required, while other roots of (3.4) must not
interfere withthe solution. (This could be satisfied by relative
stability, stability or a
, combination, depending on the problem. )
In the remainder of the half plane Re (hk) < D, we do not
care what
happens.
This discussion can be summarized graphically.
f AhA=-h -planey iJj 11
STABLE
8 \/ /
CCU RATE
\\\\1 -'ArJD ;. '.. '0 4 .... /.
-,«A0 LE « »-0
1 1.17 10 liFigure 3
6-
-
A method which satisfies these properties will be ealled
"stiffly stable with
respect to D, 8, and a".
Roughly'speaking, if mgre accuracy is required, then larger Dand
the smaller e and a should be used. Note that, for a given method,
if hk.is in the left half plane, then h must be chosen so that hk
lies inside the regionof accuracy. This is a reasonable thing to
40; it represents a reduction in h
to achieve the desired accuracy. If hA is in the right half
plane (not includ-
ing the imaginary axis) then either h can be made small enough
to bring hk inside
the region of accuracy or else it can be made large gnough to
put Ah ip the
"don't-care" region of stability, depending on whether the
solution for that
component is of interest or not.
6. Stiffly Stable Methods
The existence of @tiffly stable methods depends on the
parameters D,
8, and a and on the definition of acegracy. The usual definition
of accuracy
is that of order. Dahlquist has shown thAt if D is zero then the
order p cannot
exceed 2. The only positive result so far is that methods of
higher order than
2 do exist if D > 0. To be precise, methods of order as high
as 6 have been
obtained and shcwn to be stiffly stable for suitable parameters
D, 8, and e.These methods were found by observing that as hk
changes from 0 to
plus infinity the roots of (3.4) move from the roots of the
polynomialk
k-i k-ik
p (E) = E ai E to those of the polynomigl G (t) = E Bi g · From
this1=0 i=0
it is obvious that G (E) must itself have stable roots, and must
have degree k.kThe most stable possibility is a (g) = & which
has zero roots. If the unique
method of degree k is calculated for this 0 (g), it can be shown
to be stablefor k
-
F .
A
4
STABLE
2 REGION
6 (D95
m.-6 -4 -2 2 4
-2
-4
.
./ „...·
-
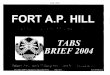
k=5 k=6
A hX plane
k= 4
5
Maximum values in4 real positive direction
'.1-Jp k=3 k Max (approx)20
w 3 3 .1UNSTABLE SIDE 4 .7
k=2 5 2.46 6.1
2
This is a lowerbound on D.
1STABLE SIDE
1 2 3 4 5 6
-
circle.
This boundary can be found in the hk plane as the locus of -2
11aCE) for'
iet=e , 6+ - [0, 2*]. This locus can be plotted in the hk plane.
It is known
that at hk. = + infinity, the method is stable so that any
region connected to
that point will be stable by a continuity argument. These plots
are shown for
k=2 (1) 6 i n Figure 4 and 5. It can be seen that up to k=6
methods are
stiffly stable for. D > 6.1, e < .5 and for some a that
has not been determined.
These methods have been used with success on a set of three
equations arising
in a. chemistry reaction where the time constants are 1/.01 (1 a
small amount)
and 1/3500 respectively.
7, Another Difficulty - Corrector Iteration
An implicit corrector formula can not, in general, be solved
explicitly
for y Usually a first guess (the predicted value) is used to
start an inter-n+1'
active solution, usually of the successive substitution form.
Specifically, if '
the corrector formula isk ' . +
GO n+1 = -hBO y' (xn+1' Yn+1) - E .(aj n+1-j + hBj
YA-j+1)1-1.
(0) 'and the predicted value of y is yn+1' the corrector
iteration is usuallyn+1
(m+1) (m)) -200 yn+1 = -h BO y' (xn+1' Vn+1 ' ""
This will converge if |to *1
is less than 1 in a region encompassing a
large enough neighborhood of the solution. Since this depends on
h, it is
usual to say that for sufficiently small h the bound is
satisfied. .Unfor-By'tunately we are interested in large values of·
h 39". Instead, let us
consider .·
the corrector iteration
a (m+1) 4. hBQ I)(m) Y(m+1) =0 n+1 .n+10
- h (y'(xh+1, n+1 D n+1) L. . . .(m) _ (m) (m) _ s(7.1)
(m) (m)where B is a matrix in case we are talking of a system of
equations. D
-10-
-
is not specified at this time except that I + -, D is to be
non-singularhOO _(m) .a
so that (701) can be solved for.y .. . Note that if D is - (y )
then(mfl) 0 (m) . By' (m)n+1 oy n+1(7.1) is the Newton iteration to
solve the corrector formula.
.If a sequence D(m) can be chosen to .make (7,1) converge, then
it
converges to the solution of the corrector· formula. Therefore,
if an approxi-A,·,
mation to - can be calculated, it can be used for D(11). This
need not becalculated for every iterate, nor yet for every step if
- changes slawly.
It is convenient to re-express (7.1) to simplify the
arithmetic.Subtract (711) with m-1 replacing m from (7.1) to
get
I,. :P DC.).11 'Cm.1) - 1 I + BO DC.-1)-1 'Cm) -0
- hBO 1, (y(m)) - D(m)y(m) _ y,Cy(m-·1)) + D(m-1.) y(m=l)
(762)0
(Note that the subscript 'n+1' has been dropped and. that y' (y
(m)) hasbeen abbreviated to y' (y(m)).)
n+1' n+1
Rearranging (7.2), we get
I + BO D(m) (yimfl) _ 3(m)) = _ BO .Y, (1(m)) _ Cy, Cy(m·-1)) +
D(m-1) Cy(m)·
ao L
- y(m.-1) 3 (7.3)
Define the variable d(Ill) = hy' (y(m-1.) ) 1. hD(Ill-.1) (y(m)
_ (m-1) n+1 n+1 n+1 n+1
Hence (703) can be written a.s
y I+ -D' hy, (y ) - (7.4)(m+1) = y(m) _ BO 130 (m) 1-1 (m) \
d(m) 10We .also need· a ,recurrence "relation for d(m)
d
-
= hy, Cy(m)) _ FI + BO D(m) FI + hOO D(m) - -1 hy, Cy(m)) -
d.(m) L ao L ao
+ FI + hBO D(m). -1 hy, Cy(m)) - d(m) L ao
Therefore
d.(m+1) = d.(m) + I + BO D(m) -1 hy, (y(m)) - d(m) (7.5)L ao
We need to define d It should be chosen to make (7.4) correct
for m = 0.fo)
From (7.1)
F hBoII +
- I)(O) Cy(1) _ y(0)) =L ao
hB- 5.-2 (y, (y(0)) - D(0)y(0)) - - (aj yn-j+1 + B hy, )0 j=1
0
j n-j+1
- I S. hOOIDCO) yCO)0
Bo i(0) ) FOOy (0)
1= - -- 1 hy, (ywo
C
+ [Br + 1'1 BO (al n-j+1 + Bjhy.'.j+1)]
a y(0) kHence d(0) =- 0 n+1 - E 1 (a + he y' ) (7.6)n+1
BO B j n-j+1 tjn-j+1j=1 0
(0)Since yn+l, the predicted value is a linear combination of
earlier function values
and derivatives, so is d(O . Note that if y is the value of y
which satis-n+1- n+1 n+1
fies the corrector equation, then
-k kd(0) = -1|Z a v +h Z B yn+1 Bolj=o m «n-j+1 j=l j n-j+11
1= -h@ vi = hy,
BO 0n+1 n+1
-12-
-
(0)Therefore, we identify d as a "preditted" vallie Af hy' When
(7.5) (6h*n+1 n+1
verges, d = hy, (Y ) so that d .converges td hy'(m) (m)· (m)
n+1 n+1
The pradictor and cbtrector formdiae can noW be rewritten in
bhe[3]form giveh in Gear. Defint the vector
Z(m) i y(m), dCm), yn-1, ya-2, 1-n · ' i i hyj-i, hyn-2 1 ' 0
'
The predictor forHula. and (7.5) can be ·ekpressed as
Z
-
n
A is the Pascal ttiangle matrix
1 1 1 1 1 ... 1
1234 k13614
1.1 k
1
and £ is determined by the method. The equivalent methods to
those discussed
in Section 6 are given by the following f.
234 5 680 2/3 6/11 24/50 120/274 720
/1764 :
1 3/3 11/11 50/50 274/274 1764/1764
f2 1/3 6/11 35/50 225/274 1624/1764
g O 2/11 10/50 85/274 735/17643
E4 0 0 1/50 15/274 175/1764 i,
E 0 0 0 1/274 21/17645 "
..:0
£6 0 0 0 0 1/1764
8. Practical Considerations -·Starting and Step Changing
To write a useful code, a number of practical problems must
be
solved. These include:
(a) How to start
(b) How to choose.the step size
(c) How to decide when to re-evaluate an approximation to
I, + 2 Dll-'(d) What order method to use.
-14-
-
Insufficient numerical work has been done so far to substantiate
the suggestions
below, but preliminary tests suggest that the following provides
a practical
solution to these problems. (Parenthetically it should be' noted
.that the fol-lowing remarks also apply to other than stiff
equations, which also raises the
question of when to use stiffly.-stable formulae and evaluate an
approximation to
'- hBO 1-1
1. I tar D -1and when not to bother. If stiffly stable methods
with reason-
able error terms can be found, then it may be worth always using
them. The fol-
lowing method is based on this assumption.)
The method consists of the following steps. Initially it is
assumed
that some initial values exist for the function values, their
derivatives and
possibly higher derivatives. All unknown derivatives are set to
zero. The
order p of the method first selected has been set so that a
sufficient number
of derivatives are known. (If only the function values and first
derivatives
are known, then p is 1.) The formulae used must be such that the
predictor and
the corrector have the same order so that the difference between
the predictor
and the corrector can be used to estimate the first ignored
derivative, and
hence the truncation error.
Step 1 Predict the value at the next point by a =A a-n+1 -n
Step 2 Iterate the corrector without changing the value of D
until it con-
verges or until.too many iterations have been used (5?).
Step 3A If too many iterations were used, and this is the first
attempt of
step 2, re-evaluate D and repeat step 2. If then is the
second
attempt, halve the step size.and return to step 1.
Step 3B If the corrector converges, examine the difference
between the pre-
dicted and corrected values of the functions. This is an
estimate
of k hP+1 y(P+1) where k depends on the method. Since the
leadingP+1 (P+1)term of the error has the form C h y where C is
also known,
an estimate of the error can be made. This should be compared
with
Eh where E is a measure of the error to be permitted on the unit
in-
terval.. (If the equations are known to be very stable or
unstable,
then .E should be changed throughout the interval.) If the
estimated
error is too large the step must be rejected; if it is too
small, it
-15-
-
can be accepted, but in either case, the next step should be
an
order determining type (Step #4). If the error is within
bounds,
return to Step 1 for the next integration.
Step 4 If the error is too large or too small the step size must
be adjusted
(by a factor of 2 down or up on a binary machine). However, do
not
increase the step until at least p steps have been made since
the
last change. (From a multistep point of view, this would amount
to ·
using points further back in history than the last step change,
where
presumably, things were less well behaved.)
Having adjusted the step, perform a test for order as
follows.
An estimate of the scaled (p+1)st derivative is available from
the
last successful step (except in the case of the first step).
Use
this and perform an integration with the abope technique of
order
p+1. Do not check the error; instead use the predictor
corrector
difference to estimate the error, and compare this with the
estimated
error for methods of order p and p-1 which can be obtained using
theP+1 (P+1) p (p)available values of the scaled derivatives h y
and h y(P+1). P:
Choose the order method which gives the smallest error (in
relation
to the components of E if a system is b eing integrated) .
Repeat the
last step if necessary.
9. Finding Stiffly Stable Methods
At present, no technique is known for finding stiffly stable
methods
except that of using common sense and investigating'the
properties of the guess.
A possible approach might be the following (although it has not
been successful
yet).
P(E)- should approximate log & for an appropriate region of
the E-a(E)
plane corresponding to the accurate region of Figure 3. The part
of |E| > 1
that does not correspond to the accurate region should map into
the don' t care
region while the part of | E| < 1 th at does not correspond
to the accurate region
may map inte. anything. p(E) is a rational fraction, so we ask
the question="how is a ratioial fraction chosen to satisfy the aims
above?" Such a method
-16-
-
method may not be consistent, but that does not matter since we
do not want con-vergence as h + 0, the point of the work is to
handle large h.
\
-17-
-
BIBLIOGRAPHY
[1] Dahlquist, G. G., "A Special Stability Problem for Linear
Multistep Methods,"BIT 3 (1963) pp. 27-43.
[2] Henrici, P., Discrete Variable Methods for Ordinary
Differential Equations,Wiley, New York.
[3] Gear, C. W., "Numerical Solution of Ordinary Differential
Equations ofVarious Orders," Argonne National Laboratory Report,
ANL 7126, Argonne,Illinois, 1966.
-18-
L
-
.
APPENDIX
kDetermining p(&) when a(E) =g.·
[2]· It is known (Henrici ) that if the method is of degree p,
then
I. P(E) - logE 0(E) - c(&-1)P+1 as & = 1 (Al.10(This is
the statement that the root of p(E) - log(B) 0(E) = 0 is close to
B.)
k (E)If we set p=k and 0(&) =E, (Al.1) determines p in the
following way.Set E-1 = x
p(x+1) = log (x+1) . (1+x)k truncated to terms in xk and
lower.
If we represent p(E) by the column vector
2 = Iak' (Xk-1' ..., 00-1
kk-jwhere p(E) = E a. ' g , then f can be expressed as
0 J
1-1 1-1. . . (-l)k -1 00 1 -2 3 (-l)k-1 k kl +10 0 1 -3 (_l,k-2
(]A 2j /14 k 1 -1/2
2 = 1 (2//k) /k) k 1
01/3
t t 00 1 1k (:) . . ' 8}(:j k l -(l)k/k
The last column consists of the coefficient of the logarithm
series for (1+x).kThe hecond matrix corresponds to multiplying by
(1+x) and ignoring terms abbvek
x . The first matrix arises from the conversion back te E =
1+x.
If this is done for k = 2(1)6, we get the examples:
2+1 = 'l n + a2 n-1 + ' ' ' + akYn-k+1 + hBO n+1
where {ai J and BO are given by:
·-19-
-
-
k BO al a a '4 a2 3 5 a62 ·213 4/3 -1/3 0 0 0 0
3 6/11 18/11 -9/11 2/11 0 0 0
4 12/25 48/25 -36/25 16/25 -3/25 0 0
5 60/137 300/137 -300/137 200/137 -75/137 12/137 0
6 60/147 360/147 -450/147 400/147 -225/147 72/147 -10/147
4
-20-