Embed Size (px)
Citation preview
6. Frequency-Domain Analysis of Discrete-
Time Signals and Systems
6.1. Properties of Sequence exp(jn) (1.3.3)
6.2. Definition of Discrete-Time Fourier Series (3.6)
6.3. Properties of Discrete-Time Fourier Series (3.7)
6.4. Definition of Discrete-Time Fourier Transform (5.0-5.2)
6.5. Properties of Discrete-Time Fourier Transform (5.3-5.7)
6.6. Frequency Response (3.2, 3.8, 5.4)
6.7. Linear Constant-Coefficient Difference Equations (5.8)
6.1. Properties of Sequence exp(jn)
6.1.1. Periodicity of Sequence exp(jn)
The sequence exp(jn) is periodic if and only if can be written
as
,N
k2 (6.1)
where k and N are integers. It can be shown that N is a period of the
sequence. If N>0, and k and N have no factors in common, N will be
the fundamental period of the sequence. Note that exp(jt) is always
periodic.
Example. Determine the periodicity of the following signals:
(1) x(t)=cos(t).
(2) x(t)=exp(jt).
(3) x(n)=cos(n).
Example. Find the fundamental period of the following sequence:
6.1.2. Frequency of Sequence exp(jn)
is referred to as the frequency of sequence exp(jn). It is equal
to the variation of the phase n in a sampling interval, and describes
how fast the phase n changes.
exp(j1n)=exp(j2n) if and only if 12=a multiple of 2. Note
that exp(j1t)=exp(j2t) if and only if 1=2.
Example. Several pairs of signals are given next. Determine if the
two signals in each pair are identical:
(1) x1(t)=cos(1t) and x2(t)=cos(2t), where 12.
.n4
3jexpn
3
2jexp)n(x
(6.2)

(2) x1(t)=exp(j1t) and x2(t)=exp(j2t), where 12.
(3) x1(n)=cos(1n) and x2(n)=cos(2n), where 12.
Two concepts need to be clarified: (1) n is the normalized time. If t
and T are the physical time and the sampling interval, respectively,
then
n=t/T. (6.3)
(2) is actually the normalized frequency. Assume that and T are
the physical frequency and the sampling interval, respectively. Then,
=T. (6.4)
6.2. Definition of Discrete-Time Fourier Series
6.2.1. Definition
Any sequence x(n) with period N can be represented by a discrete-
time Fourier series, i.e.,
,knN
2jexp)k(X)n(x
Nk
(6.5)
where X(k) is given by
X(k) is called the spectrum of x(n).
Note that X(k) has period N.
From (6.5) and (6.6), we can see that a periodic sequence can be
decomposed into a set of elementary sequences. Any of the
elementary sequences, X(k)exp(j2kn/N), has the frequency 2k/N
and the coefficient X(k).
6.2.2. Derivation
The right side of (6.5) is
.knN
2jexp)n(x
N
1)k(X
Nn
(6.6)

.)nn(kN
2jexp
N
1)n(x
)nn(kN
2jexp
N
1)n(x
knN
2jexpnk
N
2jexp)n(x
N
1
knN
2jexp)k(X
1Nn
nn
1N
0k
Nn Nk
Nk Nn
Nk
(6.7)
Since
,1Nnnn ,0
nn ,1)nn(k
N
2jexp
N
1 1N
0k
(6.8)
(6.7) is equal to x(n).
Example. Determine the Fourier series coefficients for each of the

following signals:
(1) x(n)=sin(2Mn/N), where M and N have no common factors and
M<N.
(2) x(n)=1+sin(2n/N)+3cos(2n/N)+cos(4n/N+/2), where N5.
(3) x(n) is shown in figure 6.1.
0
Figure 6.1. A Periodic Sequence.
n
1
6.3. Properties of Discrete-Time Fourier Series
6.3.1. Linearity
Let’s assume that x1(n) and x2(n) have the same period, and a1 and
a2 are two arbitrary constants. If x1(n)X1(k) and x2(n)X2(k), then
M M NN
……
a1x1(n)+a2x2(n)a1X1(k)+a2X2(k). (6.9)
6.3.2. Shifting
If x(n)X(k), then
,knN
2jexp)k(X)nn(x 00
(6.10)
where n0 is an arbitrary integer.
If x(n)X(k), then
),kk(XnkN
2jexp)n(x 00
(6.11)
where k0 is an arbitrary integer.
6.3.3. Reversal
If x(n)X(k), then
x(n)X(k). (6.12)
From (6.12), the following conclusions can be drawn:
(1) x(n) even X(k) even.
(2) x(n) odd X(k) odd.
6.3.4. Conjugation
If x(n)X(k), then
x*(n)X*(k). (6.13)
From (6.13), the following conclusions can be drawn:
(1) Im[x(n)]=0 X(k)=X*(k).
(2) Re[x(n)]=0 X(k)=X*(k).
(3) Im[X(k)]=0 x(n)=x*(n).
(4) Re[X(k)]=0 x(n)=x*(n).
6.3.5. Symmetry
If x(n)X(k), then
).k(xN
1)n(X (6.14)
6.3.6. Convolution
Let x1(n) and x2(n) have the same period N. If x1(n)X1(k) and
x2(n)X2(k), then
).k(X)k(NX)mn(x)m(x 21
Nm
21
(6.15)
This sum is called the periodic convolution sum of x1(n) and x2(n).
Let x1(n) and x2(n) have the same period N. If x1(n)X1(k) and
x2(n)X2(k), then
.)mk(X)m(X)n(x)n(xNm
2121
(6.16)

This sum is the periodic convolution sum of X1(k) and X2(k).
6.3.7. Parseval’s Equation
If x(n)X(k), then
.)k(X)n(xN
1
Nk
2
Nn
2
(6.17)
6.4. Definition of Discrete-Time Fourier Transform
A sequence x(n) can be represented by a discrete-time Fourier
integral, i.e.,
,dnjexp)(X2
1)n(x
2
(6.18)
where X() is given by
(6.19) .njexp)n(x)(Xn
(6.19) is called the discrete-time Fourier transform. (6.18) is called
the inverse discrete-time Fourier transform. X() is referred to as the
spectrum of x(n).
Note that X() has period 2.
(6.18) and (6.19) show that a sequence can be decomposed into a
set of elementary sequences. Any elementary sequence has the form
X()exp(jn)d/(2), which has the frequency and the coefficient
X()d/(2).
6.4.1. Derivation of Discrete-Time Fourier Transform
The right side of (6.18) is
2n
2
dnjexpnjexp)n(x2
1
dnjexp)(X2
1

.d)nn(jexp2
1)n(x
n2
),nn(d)nn(jexp2
1
2
(6.21)
(6.20) becomes
).n(x)nn()n(xn
(6.22)
6.4.2. Convergence of Discrete-Time Fourier Transform
The series in (6.19) converges when x(n) is absolutely summable.
That is, there exists a finite constant B such that
Since
(6.20)
(6.23).B|)n(x|n
We should note that this condition is sufficient for the convergence
of the series in (6.19) but unnecessary.
Example. Find the Fourier transforms of the following sequences:
(1) x(n)=(n).
.N|n| 0,
N|n| ,1 x(n)(2)
(3) x(n)=anu(n), 0<|a|<1.
(4) x(n)=anu(n1), |a|>1.
(5) x(n)=a|n|, 0<|a|<1.
Example. Prove
(6.24)).,[ over || 0,
|| ,1
n
n)sin(
0
00

Example. Find the Fourier transform of x(n)=cos(0n).
Example. Assume that x(n) has period N and X(k) is the Fourier
series coefficient of x(n). Show that the Fourier transform of x(n) is
.kN
22)k(X)(X
k
(6.26)
6.5. Properties of Discrete-Time Fourier Transform
6.5.1. Linearity
If x1(n)X1() and x2(n)X2(), then
a1x1(n)+a2x2(n)a1X1()+a2X2(), (6.27)
where a1 and a2 are two arbitrary constants.
.m22)njexp(m
00
(6.25)
Example. Prove
6.5.2. Differentiation
If x(n)X(), then
jnx(n)dX()/d. (6.28)
6.5.3. Shifting
If x(n)X(), then
x(nn0)X()exp(jn0), (6.29)
where n0 is an arbitrary integer.
If x(n)X(), then
x(n)exp(j0n)X(0), (6.30)
where 0 is an arbitrary real number.
Example. Let x(n)X(). Prove

6.5.4. Scaling
If x(n)X(), then
),m(X)(Ym of multiple an ,0
m of multiple an ),m/n(x)n(y
(6.32)
where m is a nonzero integer.
Letting m=1 in (6.32), we can obtain the reversal property of the
discrete-time Fourier transform, i.e.,
x(n)X(). (6.33)
From (6.33), the following conclusions can be drawn:
.
2 of multiple a ),0()0(X
2 of multiple a ,e1
)(X
)(Y)m(x)n(y jn
m
(6.31)

(1) x(n) even X() even.
(2) x(n) odd X() odd.
6.5.5. Conjugation
If x(n)X(), then
x*(n)X*(). (6.34)
From (6.34), the following conclusions can be drawn:
(1) Im[x(n)]=0 X()=X*().
(2) Re[x(n)]=0 X()=X*().
(3) Im[X()]=0 x(n)=x*(n).
(4) Re[X()]=0 x(n)=x*(n).
6.5.6. Convolution
If x1(n)X1() and x2(n)X2(), then
x1(n)x2(n)X1()X2(). (6.35)
This property is proved as follows:
).(X)(Xmjexp)m(x)(X
mjexp)(X)m(x
njexp)mn(x)m(x
njexp)mn(x)m(x
21
m
12
m
21
m n
21
n m
21
(6.36)
Example. Assume x1(n)=anu(n), 0<|a|<1, x2(n)=bnu(n), 0<|b|<1 and
ab. Find x1(n)x2(n).
If x1(n)X1() and x2(n)X2(), then
,d)(X)(X2
1)n(x)n(x
22121
(6.37)
where the integral is called the periodic convolution integral of X1()
and X2().
Example. Find the Fourier transform of
.d|)(X|2
1|)n(x|
2
2
n
2
(6.39)
This property is proved as follows:
.n
)2/nsin()4/n3sin()n(x
22
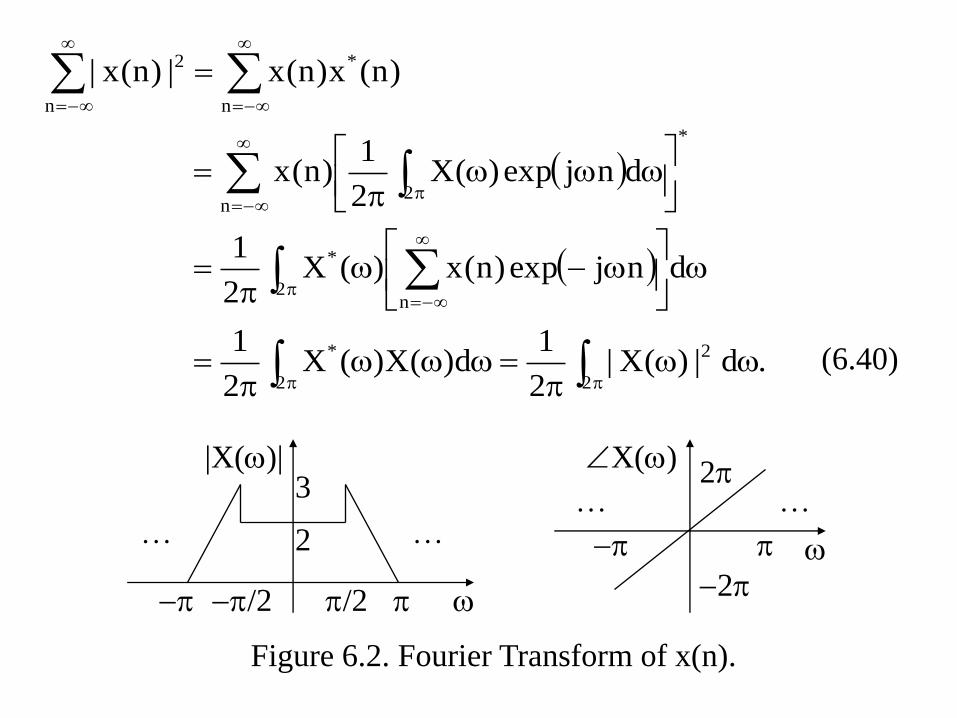
6.5.7. Parseval’s Equation
If x(n)X(), then
(6.38)
.d|)(X|2
1d)(X)(X
2
1
dnjexp)n(x)(X2
1
dnjexp)(X2
1)n(x
)n(x)n(x|)n(x|
2
2
2
*
2n
*
n
*
2
n
*
n
2
(6.40)
Figure 6.2. Fourier Transform of x(n).
2
3
/2 /2
|X()|
X()2
2
…… …
…
Example. Let the Fourier transform of x(n) be given in figure 6.2.
Determine whether x(n) is periodic, real, even and of finite energy.
6.6. Frequency Response
A linear time-invariant discrete-time system can be characterized
by the frequency response, which is defined as the Fourier transform
of the impulse response.
Note that the frequency response has period 2.
6.6.1. Response to exp(j0n)
Let x(n)=exp(j0n) be the input of a linear time-invariant discrete-
time system. Then, the output of the system is
y(n)=exp(j0n)H(0), (6.41)
where H() is the frequency response of the system.
Proof. Let h(n) be the impulse response of the system. Then,
).(H)njexp()mjexp()m(h)njexp(
)mn(jexp)m(h)n(y
00
m
00
m
0
(6.42)
When the input is a weighted sum of signals with form exp(j0n),
the output can be determined according to (6.41) and the linearity of
the system.
6.6.2. Response to a Periodic Signal
Consider a linear time-invariant discrete-time system. If the input
is periodic, the output has the same period. The relation between the
input and the output is expressed as
.kN
2H)k(X)k(Y
(6.43)
X(k) and Y(k) are the Fourier series coefficients of the input and the
output, respectively. H() is the frequency response of the system. N
is the period.
Proof. x(n) can be expressed as
.knN
2jexp)k(X)n(x
Nk
(6.44)
According to (6.41) and the linearity of the system, we obtain
and thus (6.43) is derived.
6.6.3. Response to a General Signal
The I/O relation of a linear time-invariant discrete-time system can
be expressed by the frequency response, i.e.,
Y()=X()H(), (6.46)
,knN
2jexpk
N
2H)k(X)n(y
Nk
(6.45)
where X() and Y() are the Fourier transforms of the input and the
output, respectively, and H() is the frequency response.
Proof. x(n) can be expressed as
.dnjexp)(X2
1)n(x
2
(6.47)
According to (6.41) and the linearity of the system, we obtain
and thus (6.46) is derived.
(6.46) can also be directly derived from the convolution property
of the Fourier transform.
Example. Determine the output of a linear time-invariant discrete-
time system. It is known that the input and the frequency response of
the system are x(n)=cos(0n) and H()=sin[sin()], respectively.
,dnjexp)(H)(X2
1)n(y
2
(6.48)

Example. A distortionless transmission system is described by
y(n)=Ax(nn0). (6.49)
Find the frequency response.
Example. The frequency response can be expressed in terms of its
amplitude and phase, i.e.,
H()=|H()|ejH(). (6.50)
The minus derivative of H() is called the group delay. Show that
the group delay of a distortionless transmission system is a constant.
Example. The frequency response of an ideal low-pass filter is
(6.51)
over period [, ). Find the impulse response.
0
0
|| 0,
|| ,1)H(

Example. An ideal filter is best in frequency selectivity. However,
it is noncausal, and its impulse response is oscillatory. These defects
can be overcome by using a non-ideal filter. The frequency response
of a typical non-ideal low-pass filter is
,)jexp(a1
a1)(H
(6.52)
where 0<a<1. Find the impulse response.
Example. Two ideal low-pass filters have the frequency responses
(6.53)
and
(6.54)
1
1
1|| 0,
|| ,1)(H
2
2
2|| 0,
|| ,1)(H

over period [, ), respectively. 1+2< here. The two filters can
be used to construct an ideal band-stop filter, as shown in figure 6.3.
Explain how it works.
Figure 6.3. Implementation of a Band-Stop Filter.
6.7. Linear Constant-Coefficient Difference Equations
The zero-state response of a linear constant-coefficient difference
equation can be found using the Fourier transform.
x(n)
e(n) r(n)
y(n)
(1)n
H2()
(1)n
H1()
y2(n)
y1(n)
Example. A causal, stable discrete-time system is given by
y(n)0.5y(n1)=x(n), (6.55)
where x(n)=0.25nu(n) and y(1)=2. Find the zero-input response, the
zero-state response and the complete response.
First, using the method in section 5.5, we obtain the zero-input
response
yzi(n)=0.5n. (6.56)
Then, let us consider the zero-state response. The zero-state response
satisfies (6.55), i.e.,
yzs(n)0.5yzs(n1)=x(n). (6.57)
Taking the Fourier transform of (6.57), we obtain
.)jexp(25.01
1)(Y)jexp(5.0)(Y zszs
(6.58)

From (6.58), we obtain
.)jexp(25.01
1
)jexp(5.01
2)(Yzs
(6.59)
The inverse Fourier transform of Yzs() is
yzs(n)=(2·0.5n0.25n)u(n). (6.60)
The complete response is the sum of the zero-input response and the
zero-state response, i.e.,
y(n)=0.5n+(2·0.5n0.25n)u(n). (6.61)
Example. A stable discrete-time system is given by
y(n)0.5y(n1)=x(n). (6.62)
Find the impulse response.
The zero-state response satisfies (6.62), i.e.,

yzs(n)0.5yzs(n1)=x(n). (6.63)
Taking the Fourier transform of (6.63), we obtain
.)jexp(5.01
1
)(X
)(Yzs
(6.64)
Thus,
.)jexp(5.01
1)(H
(6.65)
The inverse Fourier transform of H() is
h(n)=0.5nu(n). (6.66)







![Discrete-Time Signals: Time-Domain Representationuserspages.uob.edu.bh/mangoud/mohab/Courses_files/… · · 2014-10-18• Discrete-time signal represented by {x[n]} ... 2 3 4 n](https://img.pdfslide.us/doc/110x75/5aeca2ec7f8b9a3b2e8f6970/discrete-time-signals-time-domain-repr-2014-10-18-discrete-time-signal-represented.jpg)







![Discrete-Time Signals: Time-Domain Representationsip.cua.edu/res/docs/courses/ee515/chapter02/ch2-1.pdf · · 2004-07-20• Discrete-time signal represented by {x[n]} ... Discrete-Time](https://img.pdfslide.us/doc/110x75/5aeca2ec7f8b9a3b2e8f6930/discrete-time-signals-time-domain-discrete-time-signal-represented-by-xn.jpg)