-
7/29/2019 6 Electrical System Design
1/5
ELECTRICAL SYSTEM DESIGN FOR A SOLAR POWERED VEHICLEDean J
Patterson
Northern Territory University, Darwin, Australia
ABSTRACTTwo separate electrical system designs for avehicle
built for a ra ce across Australia in November1987, ar e described,
Description of a third system f ora second race in November 1990 is
also included. Thedesign of motors, motor controllers,
DC-DCconverters, and maximum power point trackers(MPPTs) un der a
specialised set of criter ia isdiscussed.
1 INTRODUCTION. ..
Fig 1 The Desert RoseIn November of 1987 a race for solar
poweredcars was held in Australia, across the continent fromNorth
to South, a distance of 3000 km. The DesertRose, Fig 1, performed
creditably. A second race isplanned for November 1990, and design
for the nextvehicle is substantially complete.Designing an
electrical system for such a vehicleoffers some interesting
challenges in the use of pow er
electronic systems. The primary design criterion isthat of
maximum achiev able aver age efficiency, and asecond ary issue is
that of m inimum w eight.
The avera ge efficiency is the result of integrationof system
component efficiency characteristics over arange of patterns of po
wer use, which must take intoaccount known road gradients and
surfaces, predictedmeteorological conditions, and race
strategies.The estimated vehicle power requirements, forwhat appear
to be achievable design parameters forthe 1990 race, are shown in
Fig 2. A constantretarding force for rolling loss, due principally
tohysteretic loss in the tire walls, is assumed, and theaerodynamic
loss shown results from a n aerodynamicforce which. for clean flow,
is assumedproportional to speed squared.
Watts1wo14aa -ima1OW - - Rollin8 loss
--
WO ,-Aerodynamic oss- -Total lossW O -400-
0 1 0 8 0 S O H ) M ) m
Speed (kph)
to be
Fig 2 Estimated vehicle power use, Cd .13, All upweight 260 kg,
level ground.From Fig 2 it can be seen that if rolling loss
isassumed linearly proportional to all up weight, then,at an
average speed of 60 km/h, there exists a trade-off between weight
and power of around 0.9watts/kg. Hence, if in the system design the
availablepower can be increased by 0.9 watt, then it isreasonable
to do so if the weigh t penalty is less than akilogram.The total
mechanical power requirements shown
in Fig 3 result from adding potential energycalculations to the
data of Fig 2.
618CH2873-8/90/0000-0618 $1.00 990 IEEE
-
7/29/2019 6 Electrical System Design
2/5
::Io Road Gradients
-
/ I
80-230 volt 30 kHz 1.1 kW P mDC-DC ConverterB FWM DC Motor hg ne
t DC
1800 watt M a r Controller~ _ _ _ _ _
-400
o i o a o s o a o w w o a o wSpeed (kph)
Fig 3 Total mechanical power requirements on arange of road
gradients.The power available depends on a number ofpredictable and
unpredictable factors. However, for aphotovoltaic arra y of size
specified by the ra ce rules(roughly equivalent to 8 square
metres), the cost ofcells is a major determ inant.For the 1987 race
an average electrical power of850 watts was assumed, whereas for
the 1990 race afigure of 1200 watts is assumed.Conversion
efficiency of electrical power input tomechanical power at the rear
wheel of better than80% is achievable.2 INITIAL DESIGN
CONSIDERATIONS
It is clear that some form of storage is necessary,
andSilver-Zinc batteries are the clear choice in terms ofenergy
density, (watthours/kilogram). Frommanufacturers data, optimising
energy density leadsto a battery with a relatively small number of
highcapacity cells, and hence a lower battery voltage.Design of
electric motors for high efficiency,howeve r, generally leads t o
higher voltage designs, inthe case of DC m otors for exam ple,
simply tominimise the loss due to voltage drop across thebrushes.
Further, commercially available inductionmotors and permanent
magnet synchronous motorsgenerally require in the order of hundreds
of volts.These facts, together with the fact that the
operatingvoltage of A g-Zn c ells varie s by a factor of tw o
fromlowest usable voltage to voltage on charge, lead tothe use of a
DC-DC converter to match the load tothe battery, and to stabilize
the supply for ease ofcontrol. Th e cost of DC -DC conversion
(averaging2.5%) is paid for in the extra capacity carried for
agiven weight.
M a x i m u m PowerPoint Tracker
80-8gO volt Induatrtal 1. 1 kW 3 PbDC-DC Converter 9 Phaae PWM
Induction
80 volt 70 AhAg-Zn Batteq
Fig 4 Induction motor system
Fig 5 D C motor systemFigs 4an d 5 show two designs which
werecompleted for the 1987 race and tested. They weredesigned with
a maximum of compatibility andshared sub-systems, and either could
have bee n usedat any time, although the second was actually
usedthroughout the race. Fig 6 shows the design for the1990
race.
I11 SUBSYSTEM DESIGN[a) DC -DC converters
A study of expected gradients, expected racespeeds, and speed
strategies, in conjunction with theinformation of Fig 3ena bles
dimensioning of the DC-DC converter system. In 1987 this led to a
modularsystem with three units, eac h of c apacity 600 watts
619
-
7/29/2019 6 Electrical System Design
3/5
which could be operated either in parallel to drive theDC motor,
(Fig 5 ) or in series to drive the inductionmotor (Fig 4).
Fig 6 Synchronous motor systemThe units used a standard push
pull transformercoupled square wave topology operating at 30
kHz.
Efficiency peaked at 9 7% and w as greater than 95%for most of
the load range. T he losses we reprincipally in the leakage
inductance of thetransformer secondary. The fact that the losses
wereprimarily from leakage inductance had someinteresting
implications for system management,ruling out the use of the
available pulse widthregulation to control the DC motor directly,
forexample.The design, particularly of the transformer, hasbeen
extensively reworked for the new system [ l]and efficiencies
consistently above 97% are beingmeasured./b) Maximum Power Point
Trackers
Whilst the characte ristics of Silicon photovoltaiccells are
usually presented in their V-I form asfunctions of illumination and
temperature, Fig 7shows the results for a range of
commerciallyavailable panels in their normal operating conditionand
temperature. This indicates very clearly the valueof using a DC-DC
converter to maintain the cellvoltage at the maximum power point,
whilstdelivering power to a battery bus at a different,
andvariable, voltage [2]. This is particularly so whenusing a
battery with wide operating voltage range,such as Ag-Zn.In 1987 a
substantially flat photovoltaic array,seen in Fig 1, and a single
commercial MPPT wasused. However, in general, the ability to
provide foran arra y of M PPT s feeding a single battery allows
fordifferent illumination on different ar eas of thephotovoltaic
array, granting a considerably increasedfreedom to aerodynamic
designers. Further, it allowsthe use of differe nt cells in differe
nt parts of thearray.A multiplicity of MPPTs of the traditional
kind,measuring both voltage and current, multiplyingthem, and
providing the perturbation necessary tooperate a hill seeking
algorithm, leads to a substantialand complex electronic sub system,
with its ownpower drain .
voltsIllumination :- 1 s u n
-D. I- Open C C t V O l b ' .82Panel output (watts)40, I
AIf I8 13 14 15 10 17
Panel voltage12.30pm. 13/5/88, Inaolation 935 W/sq mambient temp
33C
Fig 7 Initial tests of solar panels produced b y fourdifferent
manufacturers
ao 4u ea BoTemperature, degrees Celsius
Fig 8 Maximum power point band as a function oftemperature,
calculated from measured data, and twoopen loop algorithm s for
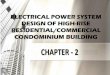
tracking this band.An examination of measured data, in this
casefrom silicon solar cells produced and tested at theUniversity
of New South Wales, Sydney, Australia[3], shows that the maximum
power point voltage,which is a function of bot h illumination an
dtemperature, can in fact be quite accurately
620
-
7/29/2019 6 Electrical System Design
4/5
approx imated as a function of the open circuitvoltage of the
cell, which varies in a very similarmanner. Fig 8 shows the effect
of temperature onmaximum power point voltage at
constantillumination, together with calculated tracks of thevoltage
either side of the maximum power pointvoltage at which the power is
1% less than themaximum. Superimposed are two functions of theopen
circuit voltage of t he cell under th ese conditions,the first
being the open circuit voltage multiplied by aconstant factor, and
the second with a constantvoltage subtracted.
2 -1.01111.71.8
1.41.91.2l.i
circuits, and a small number of passive components.A single
module runs at close to 98%efficiency at 50kHz, and is capable of
processing up to 50 watts,imposing a power drain of less than 35 mW
.
/-G- ' >Y i~
............................................. ..................
...............---- :_ 5 A charge- .. :- 15 A discharge
IC) atteriesCe l l voltageL.1 r
Volts0.1 1o.( Temp:- 60 degrees CIo no iw iw BW MO JWTime in
minutes
Fig 10 Charge and discharge characteristics of 70Ah, Ag-Zn
cell.
Y . l0.1 0.2 0.1 0.4 0.6 0.8 0.7 0.8 0.0 I
Illumination, suns
Fig 8 Maximum power point band as a function ofillumination,
calculated from measured data, and twoopen loop algorithms for
tracking this band.Fig 9 shows similar calculations for the cells
at aconstant temperature and variable illumination.Whilst it is
clear that for these cells a constantvoltage step provides a more
accurate track, it is infact slightly easier to produce a constant
fraction of
the open circuit voltage. Further, this algorithm thenenables
the use of identical MPPT s processing theoutputs of cell strings
of varying length.The loss resulting from imperfect tracking of
themaximum power point is certainly very small ineither case for
most conditions that can be predicted.Further, it should be noted
that even in a traditionalMPPT, the requirement to perturb the
operatingpoint causes the device to dynamically traverse themaximum
power point region, rather than beingcontinuously centred exactly
on it.Measu rement of th e open circuit voltage is simplya matter
of shutting down the DC -DC converter for ashort time, for example
for 0.5 ms every second, thusrejecting abou t 0.05% of the
available power.A system based on a standard boost convertercircuit
has been designed using two integrated
Only limited information regarding thecharacteristics of A g-Zn
cells is available, particularlywhen used in a cyclic situation.
Whilst these cellshave a coulomb efficiency very close to loo%,
thevoltage on charge shows an unusual "plateau"behaviour. Fig 10
shows the results of trials onindividual cells at the end of the
1987 race. What caneasily be extrac ted fro m these data is a curve
of cellwatthou r efficiency as a function of th e state ofcharge of
the cell, which varies dramatically between75% an d 90%. This has
an important effect onenergy management strategy, which must
includesome risk calculations, since the most efficient use ofthe
battery occurs when it is in a very low state ofcharge, shortening
its life, and implying vehicleoperation with very low power
reserves.Id) Motor Controllers
The industrial 3 phase induction motor controllerof Fig 4
required only minimal modification to beable to feed directly into
the DC link,and required aseparate small inverter to provide the
power for thecontrol circuits. The D C mo tor controller of Fig 3
isquite standard. The controller of fig 6 uses an opticalshaft
position sensor, to provide the normal "DCbrushless motor"
trapezoidal control. A velocitycontrol loop is added f or the eas e
of control by thedriver.
621
-
7/29/2019 6 Electrical System Design
5/5
0.950 r0.925
0.900
0.875
7 0
Motor Efficiency
G r a d i e n tFig 11 Efficiency surface for 4.5" servomotor
invehicle with param eters as shown in Figs 2& 3(e) Motor
Choice and Design
Choosing or designing a motor for the expectedpower levels
satisfying the weight and efficiencycriteria, leads fairly directly
to either a high voltageDC motor, where the brush drop is
negligible, or,more ideally, to the rotating field and
stationaryarmature of the "permanent magnet synchronous" /"DC
brushless" variety. Refining the effectiveness ofpermanent magnet
material, and where necessary,iron in the m agnetic circuit, leads
to the choice of arectangular flux distribution on the rotor,
andrectangular/trapezoidal current waveforms on thestator.
A nine phase Nd Fe B permanent magnet rotormachine is currently
being tested. Since the switchingis carried out using power
MOSFETs, and efficientdesigns involve some paralleling of these
devices,there is benefit to be ha d by increasing the number
of"phases" (although the c oncept of phase can be ratherconfusing
when the current patterns are no longersinusoidal, and phasor
analysis is no longerappropriate). By increasing the number of
"phases"the sam e num ber of MOS FE Ts of a given rating canbe
used, the fraction of time in which arm atureconductors are not
carrying current can be reduced,raising the efficiency, and the
machine more nearlyapproaches an "inside out" DC machine.
Finite element analysis has been used in thedesign of this
machine t o minimise the effec ts ofarmature reaction. This is not
difficult given that theeffective relative permeability of Nd Fe B
magnetmaterial is close to unity.The major loss in such machines
using the normalstator configuration, and high flux densities of
theorder of 1 Tesla, readily achievable with Nd Fe Bmagnetic
material, is loss in iron magnetic pathssubjected to alternating
flux. Complex structures arenecessary to reduce or remove the iron
content ofthese paths.Once machine parameters have been
establishedit is a simple matter to develop, by combining
thisinformation with the requirements of Fig 3 , efficiencysurfaces
of the type shown in fig 11, which arenecessary to develop race
strategy. The data for fig11 comes from a 4.5" servomotor chosen as
a back-upfor the motor under development.Although regenerative
braking is appealing inprinciple, the very limited amount of steep
gradienton the course and the substantial extra lossesinvolved,
particularly in the battery, leads to thefitting of an over-run
clutch on the motor shaft. Inover-run conditions the motor
efficiency computes asunity since it can be shut down.
IV S U M M A R YA total average power loss of 6% in the
electronics,being in the MPPTs, DC-DC converters and
motorcontroller, 9% in the motor and 2% in a transmissionstill
leaves considerable scope for improvement. Thesuggested weight powe
r trade-off of .9 watts/kgencourages further sophistication in
motor design andpower electronics.References[ l ] V. A. Niemela, G.
R. Scut, A. M. Urling, Y.Chang, T. G. Wilson, H. A. Owen Jr., R.
C.Wong, "Calculatin the Short Circuit Impedan cesof a Multiwiniing
Transformer from itsGeometry," IEEE Power Electronics
SpecialistsConference 89CH2721-9, 1989, pp. 607-617.[2] L. L.
Buciarelli, B. L. Grossman, E. F Lyon, N. E.Rasmussen, "The Energy
Balance Associated withthe Use of a MPPT m a 100 kW Peak powerS
stem, 14th IEEE Photovoltaic Specialistdn fer en ce , San Diego,
CA, 1980[3 ] M. A. Gre en, Electrical EngineeringDepartment,
University of New South Wales,private correspondence.
622