Embed Size (px)
Citation preview
DE2-EA 2.1: M4DE Dr Connor Myant
6. 3D Kinematics
Comments and corrections to [email protected]
Lecture resources may be found on Blackboard and at http://connormyant.com

Contents Three-Dimensional Kinematics and Dynamics of Rigid Bodies ............................................................... 2
Kinematics ............................................................................................................................................... 3
Velocities and Accelerations ............................................................................................................... 3
Moving Reference Frames .................................................................................................................. 4
Euler’s Equations ..................................................................................................................................... 7
Three-Dimensional Kinematics and Dynamics of Rigid Bodies For many engineering applications of complex kinematics and dynamics we must consider three-
dimensional motion. In this chapter we will explain how three-dimensional motion of rigid body is
described. Then we will derive the equations of motion and use them to analyse simple motion.
Design Engineering Example: The ability to model
and understand the motion of the human body
enables better design of garments, wearable tech, and
other products that interface with the consumer
during motion. It is also vital in the medical field as
well; to reach the optimal design of implants and
prosthetics we must first develop methods for
analysing gait and biodynamics. In addition, this
enables clinicians to diagnosing joint conditions,
monitor progression and evaluate treatment
outcomes.
Design Engineering Example: In the near future it is envisaged that aerial robots (Drones) will have
the capability to autonomously construct structures in many applications: building temporary
shelters following natural disasters, deploying scaffolding and support structures on conventional
construction sites, or assembling ramps across gaps and difficult terrain to enable access to
terrestrial vehicles (http://www.imperial.ac.uk/aerialIs/).
In order for such tasks to be carried out
multiple robots will need to be employed
simultaneously. This team of robots will need
to communicate and understand were each
other are, and how they are moving relative to
each other.

Kinematics If a motor bike rides in a straight line, the wheels undergo planar motion. But, if the bike is turning the
motion of the wheels is three dimensional (Figure 6.1). The same can be said for an aeroplane; planar
motion when in level flight, 3D when banking or turning. A spinning top will be in planar motion at
first, rotating about a fixed vertical axis. But, will eventually begin to tilt and rotate under 3D motion.
Figure 6.1. Example of planar and three-dimensional motion
Velocities and Accelerations We have already looked at the basic concepts needed to describe the 3D motion of rigid bodies
relative to a given reference frame. In the earlier chapters on Kinematics we showed that a rigid body
undergoing any motion other than translation has an instantaneous axis of rotation. The direction of
this axis at a particular instant and the rate at which the rigid body rotates about the axis are specified
by the angular velocity vector �⃑⃑⃑� .
We have also shown that a rigid body’s velocity is completely specified by its angular velocity vector
and the velocity of a single point of the body. For the rigid body and reference frame in Figure 6.2,
suppose we know the angular velocity vector �⃑⃑⃑� and the velocity 𝑣𝐵 of a point 𝐵. Then the velocity of
any other point 𝐴 of the body is given by;
𝑣𝐴 = 𝑣𝐵 + �⃑⃑⃑� × 𝑟𝐴/𝐵 (6.1)

A rigid body’s acceleration is completely specified by its angular acceleration vector �⃑⃑� =𝑑�⃑⃑⃑�
𝑑𝑡, its
angular velocity vector, and the acceleration of a single point of the body. If we know �⃑⃑� and �⃑⃑⃑� and
the acceleration 𝑎𝐵 of the point 𝐵, the acceleration of any other point 𝐴 of the rigid body is given by;
𝑎𝐴 = 𝑎𝐵 + �⃑⃑� × 𝑟𝐴/𝐵 + �⃑⃑⃑� × (�⃑⃑⃑� × 𝑟𝐴/𝐵) (6.2)
Figure 6.2. Points A and B of a rigid body. The velocity of A can be determined if the velocity of B and
the rigid body’s angular velocity vector ω are known. The acceleration of A can be determined if the
acceleration of B, the angular velocity vector, and the angular acceleration vector are known.
Moving Reference Frames
The velocities and accelerations in Equations (6.1) and (6.2) are measured relative to the reference
frame indicated in Figure 6.2, which we will refer to as the primary reference frame (normally fixed
relative to the earth). We also use a secondary reference frame that moves relative to the primary
reference frame. The secondary reference frame and its motion are chosen for convenience in
describing the motion of a particular rigid body. In some situation, the secondary reference frame is
defined to be fixed with respect to the rigid body. In other cases, it is advantageous to use a secondary
reference frame that moves relative to the primary reference frame, but is not fixed with respect to
the rigid body.
Figure 6.3 shows a primary reference frame, a secondary reference frame 𝑥𝑦𝑧, and a rigid body. The
angular velocity of the secondary reference frame is specified by the vector �⃑⃑� , and the angular velocity
of the rigid body relative to the primary reference frame is specified by the vector �⃑⃑⃑� . A third

component is �⃑⃑⃑� 𝑟𝑒𝑙, which is the angular velocity vector of the rigid body relative to the secondary
reference frame.
When the secondary reference frame is not fixed to the rigid body, we can express the body’s angular
velocity vector �⃑⃑⃑� as the sum of the angular velocity vector �⃑⃑� of the secondary reference frame and
the angular velocity vector �⃑⃑⃑� 𝑟𝑒𝑙 of the rigid body relative to the secondary reference frame;
�⃑⃑⃑� = �⃑⃑� + �⃑⃑⃑� 𝑟𝑒𝑙 (6.3)
Figure 6.3. The primary and secondary reference frames. The vector �⃑⃑� is the angular velocity of the
secondary reference frame relative to the primary reference frame. The vector �⃑⃑⃑� is the angular
velocity of the rigid body relative to primary reference frame.
The rigid body’s angular acceleration vector relative to the primary reference frame can then be
expressed as;
�⃑⃑� =𝑑�⃑⃑⃑�
𝑑𝑡=
𝒅�⃑⃑�
𝒅𝒕+
𝒅�⃑⃑⃑� 𝑟𝑒𝑙
𝒅𝒕= (
𝒅�⃑⃑⃑� 𝑟𝑒𝑙
𝒅𝒕+ �⃑⃑� × �⃑⃑⃑� 𝑟𝑒𝑙) + (
𝒅�⃑⃑� 𝑟𝑒𝑙
𝒅𝒕+ �⃑⃑� × �⃑⃑� ) (6.4)
The right hand side of this equation becomes zeros, leaving;
�⃑⃑� =𝒅�⃑⃑⃑� 𝑟𝑒𝑙
𝒅𝒕+ �⃑⃑� × �⃑⃑⃑� 𝑟𝑒𝑙 (6.5)
If the secondary reference frame was fixed with respect to the rigid body, so that �⃑⃑� = �⃑⃑⃑� , the �⃑⃑⃑� 𝑟𝑒𝑙 =
0. We can see from equation (6.4) that;
�⃑⃑� =𝑑�⃑⃑⃑�
𝑑𝑡
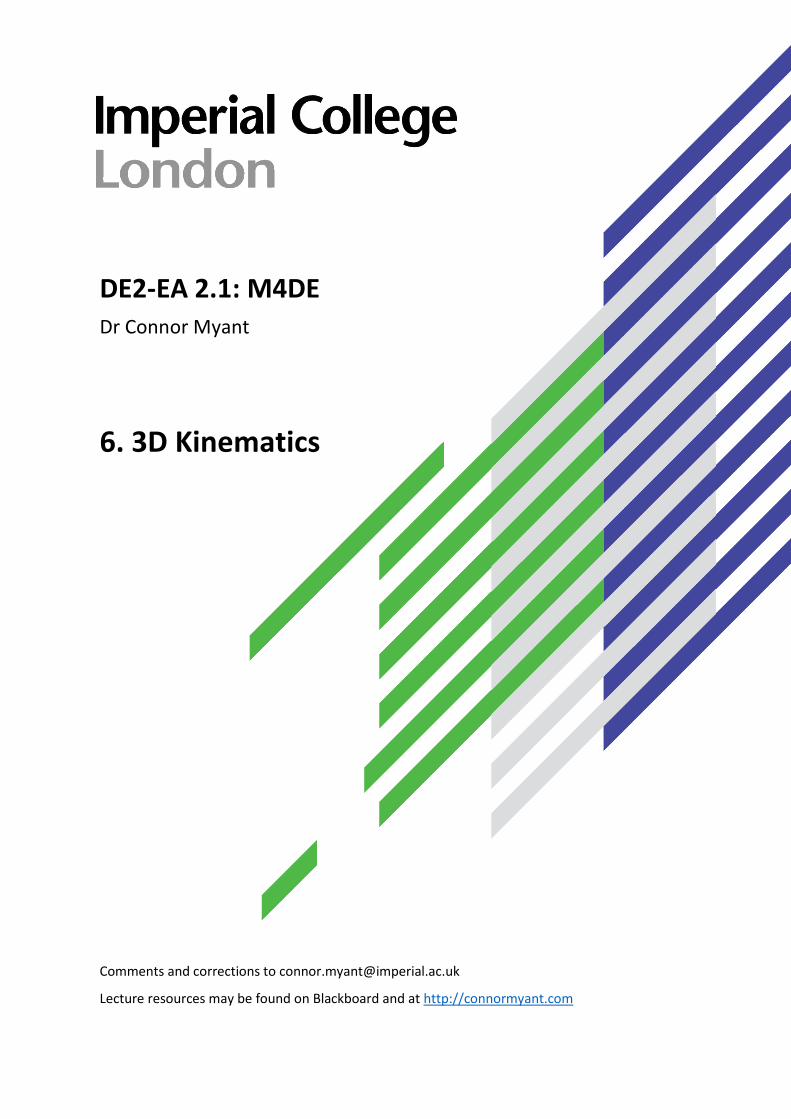
Design Engineering Example: Lets consider a rotating disc, with angular velocity 𝜔𝑑, that is
mounted perpendicular to an L-shaped shaft. The shaft rotates relative to an earth fixed reference
frame with an angular velocity 𝜔𝑂. We want to determine the angular velocity and angular
acceleration vectors of the disk relative to the earth fixed reference frame.
The disc’s motion relative to the earth fixed reference frame is rather complicated. However,
relative to a reference frame that is fixed with respect to the shaft, the disk simply rotates about a
fixed axis with constant angular velocity. If we introduce a secondary coordinate system that is fixed
with respect to the shaft; the angular velocity vector we seek is the sum of the angular velocity
vector of the secondary coordinate system and the disc’s angular velocity vector relative to the
secondary coordinate system.
We introduce the secondary coordinate system, shown below, which is fixed with respect to the
shaft. The angular velocity vector of the secondary coordinate system relative to the earth fixed
reference frame is Ω⃑⃑ = 𝜔𝑂𝑗. The disc’s angular velocity vector relative to the secondary coordinate
system is �⃑⃑� 𝑟𝑒𝑙 = 𝜔𝑑𝑖. Therefore, the angular velocity vector of the disc relative to the earth-fixed
reference frame is;
�⃑⃑� = Ω⃑⃑ + �⃑⃑� 𝑟𝑒𝑙 = 𝜔𝑑𝑖 + 𝜔𝑂𝑗
Because 𝜔𝑑 and 𝜔𝑂 are constants, we can find from Equation (6.4) that the disc’s angular
acceleration vector relative to the earth fixed reference frame is;
𝛼 = Ω⃑⃑ × �⃑⃑� 𝑟𝑒𝑙 = −𝜔𝑑𝜔𝑂𝑘

You will pick up 3D kinematics again in Robotics 1 next year.
THE NEXT SECTION IS OPTION AND WILL NOT BE INCLUDED IN THE EXAM!
Euler’s Equations To complete the kinematics and dynamics ‘loop’ I have included the following optional section.
In classical mechanics, Euler's rotation equations are a vectorial quasilinear first-order ordinary
differential equation describing the rotation of a rigid body, using a rotating reference frame with its
axes fixed to the body and parallel to the body's principal axes of inertia.
So in basic term we are using the technique we just employed to study the kinematics of a moving
reference frame and adding mass so that it becomes a dynamics problem. But only for cases where
the secondary reference frame is body fixed to the body in question and parallel to the body’s principal
axes of inertia.
Recap: From Dynamics we know that the moment of inertia of a rigid body is a tensor* that
determines the torque needed for a desired angular acceleration about a rotational axis. It depends
on the body's mass distribution and the axis chosen, with larger moments requiring more torque to
change the body's rotation. It is an extensive (additive) property: For a point mass the moment of
inertia is just the mass times the square of perpendicular distance to the rotation axis. The moment
of inertia of a rigid composite system is the sum of the moments of inertia of its component
subsystems (all taken about the same axis).

Euler's equations consist of Newton’s second law; ∑𝐹 = 𝑚𝑎. Which states that the sum of the
external forces on a rigid body equals the product of its mass and the acceleration of its centre of
mass, and equations of angular motion. Previously in 2D dynamics we showed how this related to
equation of angular motion; ∑𝑀𝑂 = 𝐼𝑂𝛼, for an object in rotation and ∑𝑀 = 𝐼𝛼 for an object in
planar motion.
Now that we want to introduce 3D motion we need to consider additional reference systems. Here is
where the Euler equations come in. They essentially combine (6.5) into the equations of angular
motion. The generalised form is given as:
Σ𝑀 = 𝐼𝑑�⃑⃑⃑�
𝑑𝑡+ Ω⃑⃑ × (𝐼�⃑⃑� ) (6.6)
Tensor: In mathematics, tensors are geometric objects that describe linear relations between
geometric vectors, scalars, and other tensors. Examples of such relations include the dot product,
the cross product, and linear maps. We will be exploring tensors and tensor matrices more in stress
analysis.
The Inertia Tensor can be expressed in a matric as;
𝐼 = [
𝐼𝑥𝑥 −𝐼𝑥𝑦 −𝐼𝑥𝑧
−𝐼𝑦𝑥 𝐼𝑦𝑦 −𝐼𝑦𝑧
−𝐼𝑧𝑥 −𝐼𝑧𝑦 𝐼𝑧𝑧
]
Which can be visualised on a cube element as shown in figure 6.4.
Figure 6.4. Inertia tensors acting on a cube element. With the origin of the 𝑋𝑌𝑍 axes at the centre
of mass of the cube.

Where 𝑀 and 𝐼 may have components in more than one plane. This is often written as the matrix
equation;
[
Σ𝑀𝑥
Σ𝑀𝑦
Σ𝑀𝑧
] = [
𝐼𝑥𝑥 −𝐼𝑥𝑦 −𝐼𝑥𝑧
−𝐼𝑦𝑥 𝐼𝑦𝑦 −𝐼𝑦𝑧
−𝐼𝑧𝑥 −𝐼𝑧𝑦 𝐼𝑧𝑧
] [
𝑑�⃑⃑� 𝑥 𝑑𝑡⁄
𝑑�⃑⃑� 𝑦 𝑑𝑡⁄
𝑑�⃑⃑� 𝑧 𝑑𝑡⁄
] + [
0 −Ω⃑⃑ 𝑧 Ω⃑⃑ 𝑦
Ω⃑⃑ 𝑧 0 −Ω⃑⃑ 𝑥
−Ω⃑⃑ 𝑦 Ω⃑⃑ 𝑥 0
] [
𝐼𝑥𝑥 −𝐼𝑥𝑦 −𝐼𝑥𝑧
−𝐼𝑦𝑥 𝐼𝑦𝑦 −𝐼𝑦𝑧
−𝐼𝑧𝑥 −𝐼𝑧𝑦 𝐼𝑧𝑧
] [
�⃑⃑� 𝑥�⃑⃑� 𝑦�⃑⃑� 𝑧
]
(6.7)
If the secondary coordinate system used to apply Equation (6.7) is body fixed, the terms 𝑑𝜔𝑥 𝑑𝑡⁄ ,
𝑑𝜔𝑦 𝑑𝑡⁄ , and 𝑑𝜔𝑧 𝑑𝑡⁄ are the components of the rigid body’s angular acceleration, 𝛼. But this is not
generally the case if the secondary coordinate system rotates but is not body fixed (Equation 6.5).
Using the Euler equations to analyse three-dimensional motions of rigid bodies typically involved three
steps:
1. Choose a coordinate system: If an object rotates about a fixed point, 𝑂, it is usually preferable
to use a secondary coordinate system with its origin at 𝑂 and express the equations of angular
motion in terms of the total moment about a fixed point 𝑂. Otherwise, it is necessary to use
a coordinate system with its origin at the centre of mass of the body and express the equations
of angular motion in terms of the total moment about the centre of mass of the body. In either
case it is usually preferable to choose a coordinate system that simplifies the determination
of the moments and products of inertia.
2. Draw a free-body diagram: Isolate the object and identify the external forces and couples
acting on it.
3. Apply the equations of motion: Use Euler’s equations to relate the forces and couples acting
on the object to the acceleration of its centre of mass and it angular acceleration vector.
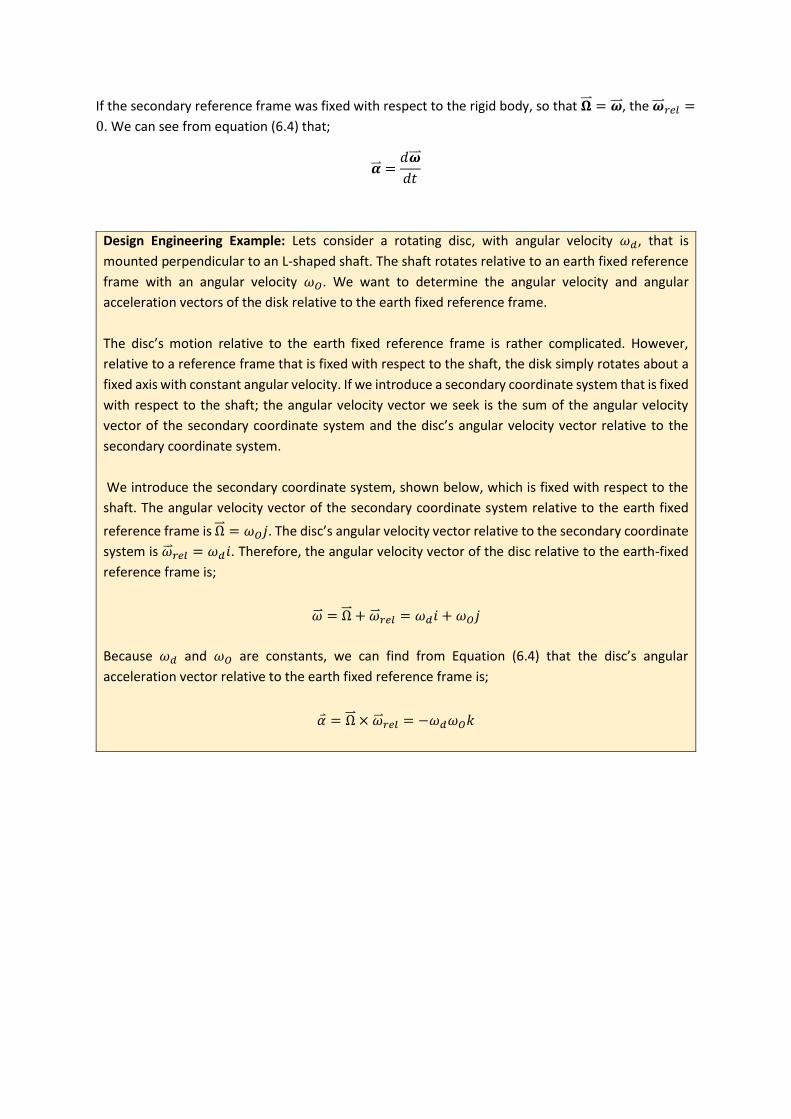
Design Engineering Example: Consider the robotic arm, below, that is used during an assembly
process; the 4 kg rectangular plate is held at O by the manipulator. Point O is stationary. At the
instant shown, the plate is horizontal, its angular velocity vector is �⃑⃑� = 4𝑖 − 2𝑗 rad/s, and its
angular acceleration vector is 𝛼 = −10𝑖 + 6𝑗 rad/s2. We want to determine the couple, 𝐶, exerted
on the plate by the manipulator.
The total moment about 𝑂 is the sum of the couple exerted by the manipulator and the moment
about 𝑂 due to the plate’s weight:
Σ𝑀𝑂 = 𝐶 + (0.15𝑖 + 0.3𝑗) × [−4(9.81)𝑘]
Σ𝑀𝑂 = 𝐶 ± 11.77𝑖 + 5.89𝑗 N m
To obtain the unknown couple 𝐶, we can determine the total moment about 𝑂 from Equation
(6.7). We let the secondary coordinate system be body fixed, so its angular velocity Ω⃑⃑ equals the
plate’s angular velocity �⃑⃑� .
First determine the plate’s inertia matrix using the M4DE formula sheet;
𝐼𝑥𝑥 =1
3(4)(0.6)2 = 0.48 kg m2
𝐼𝑦𝑦 =1
3(4)(0.3)2 = 0.12 kg m2
𝐼𝑧𝑧 = 𝐼𝑥𝑥 + 𝐼𝑦𝑦 = 0.6 kg m2
𝐼𝑥𝑦 =1
4(4)(0.3)(0.6) = 0.18 kg m2
So,
𝐼 = [0.48 −0.18 0
−0.18 0.12 00 0 0.6
]
Inputting this into Equation (6.7);
Reminder: A ‘couple’ is a system of forces with a resultant moment but no resultant force. Its
effect is to create rotation without translation, or more generally without any acceleration of
the centre of mass.

[
Σ𝑀𝑥
Σ𝑀𝑦
Σ𝑀𝑧
] = [0.48 −0.18 0
−0.18 0.12 00 0 0.6
] [−1060
] + [0 0 −20 0 −42 4 0
] [0.48 −0.18 0
−0.18 0.12 00 0 0.6
] [4
−20
]
[
Σ𝑀𝑥
Σ𝑀𝑦
Σ𝑀𝑧
] = [−5.882.520.72
] N m
We substitute into the above equation for;
Σ𝑀𝑂 = 𝐶 ± 11.77𝑖 + 5.89𝑗 = −5.88i + 2.52j + 0.72k
And solve for 𝐶;
𝐶 = 5.89𝑖 − 3.37𝑗 + 0.72𝑘 N m