Embed Size (px)
Citation preview

5822 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
On MIMO Detection Under Non-GaussianTarget Scattering
Augusto Aubry, Marco Lops, Senior Member, IEEE, Antonia M. Tulino, Senior Member, IEEE, andLuca Venturino, Member, IEEE
Abstract—In this paper, we consider a multiple-input–mul-tiple-output (MIMO) detection problem with � widely spacedtransmit antennas and � widely spaced receive antennas, and westudy the problem of designing the signal waveforms transmittedby each source node under non-Gaussian target scattering andtemporally correlated Gaussian clutter. Two figures of meritare investigated for space-time code (STC) optimization under asemidefinite rank constraint: 1) the lower Chernoff bound (LCB)to the detection probability for fixed probability of false alarm,and 2) the mutual information (MI) between the observationsavailable at the receive nodes and the “channel response” gener-ated by a point-like target, assumed present tout court. Both receiveand transmit power constraints are discussed. If the scatteringdistribution possesses some suitably defined properties of unitaryinvariance (see Section II-B), both MI-optimal and LCB-optimalSTCs have a simple canonical structure: the same set of (clutterdependant) temporal codewords are employed at the transmitnodes, the only difference among the many solutions being theamount of power radiated by each antenna. Such a spatial powerallocation critically depends upon the adopted figure of merit, thespecified power constraint, and the underlying scattering model.Sufficient conditions to determine the optimal power allocation forall design criteria are provided. Asymptotic power distributionsare also derived in the limit of vanishingly small and increasinglylarge signal-to-clutter ratios, proving that assuming Gaussianscattering at the design stage is a robust choice. A case study ofrelevant practical interest is examined in depth so as to comparethe proposed design criteria and to assess the impact of signalnon-Gaussianity on the system performances.
Index Terms—Angle diversity, energy integration, gener-alized likelihood ratio test (GLRT), lower Chernoff bound,multiple-input–multiple-output (MIMO) detection, mutual infor-mation (MI), non-Gaussian target scattering, space-time coding,waveform design.
Manuscript received November 01, 2008; revised January 07, 2010. Date ofcurrent version October 20, 2010. The material in this paper was presented inpart at the IEEE International Radar Conference, Bordeaux, France, October2009 and in part at the IEEE Information Theory Workshop, Taormina, Italy,2009.
A. Aubry is with the DIBET, Università degli Studi di Napoli “Federico II,”Napoli 80125, Italy (e-mail: [email protected]).
M. Lops is with the DAEIMI, Università degli Studi di Cassino, Cassino (FR)03043, Italy and also with the ENSEEIHT, National Polytechnic Institute ofToulouse, Toulouse 31071, France (e-mail: [email protected]).
A. M. Tulino is with the DIBET, Università degli Studi di Napoli “FedericoII,” Napoli 80125, Italy, and also with the Department of Wireless Communi-cations, Bell Laboratories, Alcatel-Lucent, Holmdel, NJ 07974 USA (e-mail:[email protected]).
L. Venturino is with the DAEIMI, Università degli Studi di Cassino, Cassino(FR) 03043, Italy (e-mail: [email protected]).
Communicated by L. Tong, Associate Editor for Detection and Estimation.Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TIT.2010.2068930
I. INTRODUCTION
T HIS paper considers a general multiple-input–multiple-output (MIMO) detection system where widely spaced
transmit antennas are used to sense the controlled area. Eachantenna may transmit a signal waveform which belongs to an
-dimensional signal space, and the echoes received from aprospective target are collected by receive antennas, them-selves widely spaced (see Fig. 1). The model may represent ei-ther a “statistical” MIMO radar [1]–[3] or a generalwireless sensor network with distributed transmit and receivenodes [4], [5], the key assumption being that the spacing be-tween the antennas (nodes) is wide enough as to guarantee thatthe target is seen under different aspect angles, i.e., angle diver-sity is generated.
A major difference with conventional MIMO data transmis-sion systems is that, while the latter aims at maximizing thedata throughput (namely, the amount of information bits suc-cessfully delivered to the destination) [6]–[8], here the perfor-mance is characterized by the pair , whereby an op-timum system should maximize the detection probability(i.e., the probability of correctly declaring a target given that it isactually present), for fixed probability of false alarm (i.e.,the probability of declaring the target presence given that it isactually absent). The case of uncorrelated Gaussian scatteringhas been thoroughly examined in [1]–[5]: assuming temporallycorrelated spatially uncorrelated Gaussian clutter,1 it was recog-nized that no uniformly optimum (in the signal-to-clutter ratio)transmit strategy exists. A number of criteria have been pro-posed for the transmitter design, ranging from the maximiza-tion of the diversity order2 [1], [2] (which is optimum in thestrong signal region) to the maximization of the received av-erage signal-to-clutter ratio [3] (which is optimum in the weaksignal region). Compromises between these two extreme strate-gies are also possible by giving up some transmit diversity infavor of some energy integration as shown in [4], [5]. The degreeof freedom that allows commuting between the diverse philoso-phies is the choice of the space-time code (STC) matrix
employed at the transmit nodes, and in particular its rank.Building on the above body of knowledge, in the present study,we relax the hypothesis of Gaussian target scattering to inves-tigate if and under which conditions the previous results carryover to a more general target model. Precisely, the main contri-butions of this study can be summarized as follows.
1Throughout this paper, we borrow from radar detection parlance the defini-tion of clutter denoting the superposition of thermal noise and possibly corre-lated disturbance due, e.g., to reverberation from the environment.
2The diversity order is defined as the rate of decay to zero of the probabilityof a miss for given probability of false alarm [2].
0018-9448/$26.00 © 2010 IEEE

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5823
Fig. 1. Considered scenario.
• We consider two figures of merit to optimize the STC undera semidefinite rank constraint: 1) the lower Chernoff bound(LCB) to for fixed , and 2) the mutual informa-tion (MI) between the observations available at the receivenodes and the “channel response” generated by a point-liketarget, assumed present tout court. To make the maximiza-tion nontrivial, two different power constraints are intro-duced, whether the system is power limited or power un-limited: in the former case, a constraint on the transmittedenergy is set, while in the latter case the constraint is onthe received average signal-to-clutter ratio.3 The use of theMI as figure of merit was also considered in [2]–[5] underuncorrelated Gaussian scattering. Instead, the optimizationof the LCB was first studied in [2] and [3] under uncorre-lated Gaussian scattering: however, De Maio and Lops [2]and De Maio et al. [3] only considered a power-unlimitedsystem with a definite rank constraint.
• Under suitable conditions of unitary invariance (to be de-fined in Section II-B) on the target scattering distribution,all design criteria result in coding strategies where thesame set of (clutter dependant) temporal codewords areemployed at the transmit nodes, the only difference amongthe many solutions being the amount of power radiated byeach antenna. In particular, such a spatial power allocationstrongly depends on the adopted figure of merit (MI orLCB), on the specified power constraint (power limitedor unlimited), and on the underlying scattering model.This key result relies on certain fundamental properties ofsymmetry, concavity and Schur concavity of the MI andof the LCB that we illustrate in this work.
• In power-unlimited systems, the optimal power allocationis surprisingly simple: each transmit sensor radiates asmuch power as needed to equalize the received averageenergy. The difference between the LCB and the MI crite-rion is only in the number of active transmit nodes: whilethe MI criterion employs the largest possible numberof sensors (which amounts to maximizing the diversityorder), the LCB criterion adjusts the number of activenodes based on the given and on the target model(which is a form of tradeoff between transmit diversityand energy integration in keeping with [4], [5]).
3This situation is relevant in MIMO radar applications as detailed further inSection II.
• In power-limited systems, the optimal power allocation hasno closed-form expression, but we provide sufficient con-ditions to compute it under both design criteria. Also, weprovide asymptotic closed-form expressions of the MI-op-timal power distribution in the limit of vanishingly smalland increasingly large signal-to-clutter ratios. It is worthpointing out that the MI-optimal power allocation is akin tothe mercury/waterfilling solution derived in [9] for parallelGaussian channels with arbitrary input distributions, andreduces to the MI-optimal solution obtained under (uncor-related) Gaussian scattering in the weak and strong signalregions (cf., Proposition 3): this represents per se a proofof the robustness of the Gaussian design for MI-optimalcodes. Finally, notice that our optimal codes include as aspecial case the ones found in [4] and [5].
• As a case study of practical interest, we investigate thedetection of a compound Gaussian target. We provide nu-merical examples to assess and compare the performancesof the proposed coding strategies in terms of LCB, MI,and detection probability. We also investigate the effect ofsignal non-Gaussianity. As far as detection is concerned,our results indicate that LCB-optimal coding is superiorsince it better exploits the inherent tradeoff betweentransmit diversity and energy integration. Also, assumingGaussian scattering at the code design stage results insmall mismatch losses in our examples: this is a quitedesirable property in real-world systems and confirms theconcept that, while simplifying synthesis and analysis,Gaussian design actually provides robust solutions whichwork well over a larger class of target scattering models.
The remainder of this paper is organized as follows. Section IIoutlines the signal model and contains the problem statement.Section III is devoted to the STC design and contains the mainresults of the paper. Section IV contains an example of appli-cation. Concluding remarks are given in Section V. Appendix Icontains a review of some relevant results in majorizationtheory. Finally, Appendix II contains the proofs of the theoremsin this paper.
Notation: In the following, , , , , ,and denote the transpose, the complex conjugate, theHermitian transpose, the rank, the Frobenius norm and the el-ement at the th row, and th column of the matrix ,respectively. is a matrix con-taining the -dimensional vectors as its columns.
denotes the Kronecker product of the matrixwith the matrix . indi-
cates the vector obtained stacking up the columns of the matrix. is the block-di-
agonal matrix containing the matriceson the main diagonal. and denote the trace andthe determinant of a square matrix . is the identity ma-trix of order , while denotes the matrix defined
as . is the manifold of the matrices
such that . Finally, denotes sta-
tistical expectation, denotes variance, and indicatesequality in distribution.

5824 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
II. PROBLEM STATEMENT
With reference to Fig. 1, and deferring the interested readerto [4] and [5] for the details, the detection problem under con-sideration can be stated in the form
(1)
where is the signal received at the th receive node,is the signal-space dimensionality (in the time domain),
is the STC matrix containing the code-word transmitted by the thtransmit node as its th column, and
is the vector modeling the scattering of the target from thetransmit antennas towards the th receive sensor. Finally,
represents the clutter at the th receive antenna and ismodeled as a zero-mean circularly symmetric Gaussian vectorwith known (full-rank) correlation matrix . Noticethat represents the energy transmitted by the th an-
tenna, while is the total transmitted energy. The linearmodel (1) relies on the following three assumptions.
1) The transmitted signals are narrowband [1], namely all ofthe receive sensors see the target as belonging to the samerange cell.4
2) The spacing of the antennas at both the transmitter and thereceiver is wide enough as to allow angle diversity [1], [7],i.e., to generate different (even though not necessarily in-dependent) aspect angles which justifies the use of thedifferent coupling coefficients for and
.3) The target is either stationary or has a known Doppler shift
at each receive antenna.For future reference, let and
. Also, define the received average signal-to-clutter ratio SCR per signal dimension and per receive antennaas5
SCR
(2)
where the assumption has been made thatfor (more on this in Section II-C) with
Finally, let be the spectral de-composition of the clutter covariance matrix, where6
and[10]. Without
4This assumption can be relaxed through cell synchronization.5Notice that in the communication literature (2) is also referred to as the re-
ceived signal-to-noise ratio (SNR).6In the following, we indicate with the set of nonnegative real numbers.
loss of generality, we assume in the following, whereby is the eigen-
vector corresponding to the th smallest eigenvalue of .
A. Detector Structure
In this work, we assume that detection takes place at a fu-sion center wherein an unquantized version of the data vector
is made available. Since no uni-formly most powerful test exists to solve the binary detectionproblem (1), the Neyman–Pearson criterion would inevitablylead to a receiver depending upon the (unknown) target statis-tics. Instead, we are interested in devising distribution-free tests.Following [2]–[5], we regard in (1) as a composite alter-native at the receiver design level and resort to the generalizedlikelihood ratio test (GLRT) [11]
(3)
In the above equation, and denote the con-ditional densities of the observations under the two alternativehypotheses, while is the orthogonal projector onto therange span of the matrix . Finally, is thedetection threshold, to be set based upon the desired false alarmprobability .
Notice that the matrix admits the following singularvalue decomposition (SVD) [10]:
(4)
where is a diagonalmatrix containing on its main diagonal the squared sin-gular values, while and
are complex matrices con-taining along their columns the left and right singular vectors,respectively. Under rank- coding, the orthogonal projector in(3) can be written as , whereis the matrix containing as its columns the left singular vectorsof corresponding to the nonzero singular values.
For any given code matrix , the performances of the test (3)can be expressed in closed—albeit implicit—form under verygeneral conditions as shown in [2]–[5]. Under the hypoth-esis, the decision statistic is a complex chi-squared random vari-able with complex degrees of freedom. As a conse-quence, can be evaluated as follows:
(5)
It is seen from (5) that the test thresholdis a function of both the complex degrees of freedomand the desired . Under and for any given vector , thedecision statistic is a noncentral complex chi-squared random

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5825
variable with complex degrees of freedom and non-centrality parameter . As aconsequence, is given by
(6)
where denotes the generalized Marcum function oforder .
B. Code Design Strategies
Code optimization would require maximizing the detectionprobability in (6) with respect to the code matrix for fixed
. Unfortunately, deriving a closed-form solution to thisproblem appears challenging. Following [2]–[5], two alterna-tive figures of merit to be maximized are considered in thiswork. The first figure of merit is the LCB to the detectionprobability , given by [12]
(7)
where and
(8)
The second figure of merit, instead, is the MI7 betweenthe received observations and the channel vectors
under [13]
(9)
Maximizing the LCB or the MI does not ensure that the detec-tion probability is also maximized. Still, they appear to be mean-ingful performance measures whose optimization can indirectlyprovide detection gains as compared to an uncoded transmissionstrategy. Indeed, the LCB represents a good approximation ofthe detection probability in the high SCR region: in this regime,we can expect that maximizing the LCB also provides optimaldetection capabilities. Moreover, notice that the GLRT amountsto writing the conditional likelihood given the unknown targetparameters and replacing them through their maximum-likeli-hood (ML) estimates performed based upon the available ob-servations. Now, it is shown in [14] and [15] that the larger theMI between the received signals and the unknown target param-eters we wish to measure, the better the ability of the receiver to
7In this work, we assume that the MI is expressed in nats.
classify and estimate those parameters. Hence, maximizing theMI is expected to reduce the ML estimation error of the targetresponse under , improving the GLRT performance.
To make the maximization nontrivial, a set of physical con-straints on the matrix must be added. We discuss here tworelevant scenarios.
• A power-unlimited system, wherein we constrain the re-ceived average signal-to-clutter ratio per signal dimensionand per receive antenna in (2). This constraint is of impor-tance in ground-based radars, wherein the overall transmitpower (which does not undergo strict limitations) is typi-cally designed so as to guarantee that a standard target witha given average radar cross section (RCS) located at themaximum surveillance distance yields a desired SCR at thereceiver [16].
• A power-limited system, wherein we constrain the trans-mitted energy per signal dimension, i.e., ;for example, this situation may arise in remote sensingand monitoring applications wherein small, battery-pow-ered transmit nodes are employed.
In both cases, an additional constraint is also imposed on therank of the STC matrix, which plays a pivotal role in the diver-sity-integration tradeoff [4], [5].
Summarizing, in a power-unlimited scenario, the optimalcode matrix is derived as the solution to the followingoptimization problem:
(10)
wherein , and is equal toor . Notice that the definite power constraint
in (10) ensures that targets whose RCS is not inferior to thatof the standard target and located at a distance not superiorto the maximum surveillance range yield an average receivedsignal-to-clutter ratio not smaller than with minimum amountof transmit power. For power-limited systems, instead, solvesthe following constrained maximization:
(11)
where again and is equal toor , while now represents the available transmitenergy per signal-space dimension.
C. Target Scattering Assumption
In this work, we study the solutions to (10) and (11) when thescattering vector is -unitarily-invariant, as specifiedby the following definition.
Definition 1: The random vector is
-unitarily-invariant if for any matrix.

5826 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
Several remarks are now in order. If the is -unitarily-in-variant, then we must necessarily have thatwhere
...... (12)
for any . Also, the -unitary-invarianceassumption on the vector implies that the random matrix
is row-exchangeable, i.e., that the jointprobability density function (pdf) of its rows be invariantto the permutations of its -dimensional arguments. Froma physical point of view, the -unitarily-invariant assumptionamounts to requiring that there is no preferred transmit arrayelement and spatial beamforming direction to illuminate aprospective target. Continuous multivariate distributions whichare -unitarily-invariant are, for example (but not limited to),the compound-Gaussian distribution [17]–[19] (more on this inSection IV) and the Haar distribution [20].
III. OPTIMAL CODE DESIGN
In this section, we first present some general properties of theLCB and the MI. Successively, we study the solution to (10) and(11).
A. Properties of LCB and MI
As to the LCB, we offer the following two results whose proofis reported in Appendix II.
Theorem 1: For any given , in (7) is a strictlydecreasing, -convex function of the squared singular values
of the matrix .
Theorem 2: Assume that is -unitarily-invariant. Then, forany given , in (7) is a symmetric, Schur-convexfunction of the squared singular values of the matrix
.
As to the MI, its properties parallel quite faithfully thoseholding for the LCB. The proof of the following two theoremscan again be found in Appendix II.
Theorem 3: in (9) is a strictly increasing,-concave function of the squared singular values
of the matrix .
Theorem 4: Assume that is -unitarily-invariant. Then,in (9) is a symmetric, Schur-concave function of
the squared singular values of the matrix .
Leveraging the above properties, we offer the following keyresult whose proof is in Appendix II.
Theorem 5: Let be equal to or . If therandom vector is -unitarily-invariant, there exists an optimal(nonunique) solution to (10) and (11) such that
with to be determined.
B. Power-Unlimited Systems
In this section, we provide sufficient conditions to designLCB-optimal and MI-optimal codes in power-unlimited sys-tems. We offer the following theorem whose proof is reportedin Appendix II.
Theorem 6: Assume that the random vector is -unitarily-invariant. Then, an optimal code matrix solving the constrainedoptimization (10) is such that
(13)
with
(14)
if , and if .
Some remarks are now in order.
Remark 1: There exist multiple solutions complying with(13). In fact, let be an arbitrary permutation ma-
trix such that .
Then, all codes satisfying (13) are of the formwith
(15)
Hence, it is optimal here to transmit from any antennasadopting any eigenvectors of as temporal codewords.Clearly, we should prefer using as codewords:in this latter case, in fact, transmission takes place along theleast interfered directions in the signal space and hence theoverall transmit power is minimized.
Remark 2: The MI-optimal code always activates the largestpossible number of source nodes and generates as many equiv-alent transmit diversity branches: this happens independently of
, of and of the underlying -unitarily-invariant scatteringmodel.
Remark 3: Under LCB-optimal coding, instead, the rank ofthe STC can be any integer value between and , dependingupon , and the scattering model. This is an indirect ev-idence of the well-known fact that maximizing the diversityorder is not the optimal strategy for any SCR as far as detec-tion performance is concerned. In keeping with previous resultsin [3] and [5], we argue that maximizing the system diversityorder eventually becomes the major figure of merit in the highSCR regime and we conjecture that there exists a finite value(which depends upon and the actual scattering model) suchthat choosing is LCB-optimal for all . Instead, atlower SCR’s target amplitude fluctuations may be beneficial: inthis case, the code rank should be better reduced to boost energy

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5827
integration. These intuitions are indeed confirmed by the numer-ical results in Section IV. In the limit that SCR , the LCBmay become trivial for any choice of the code matrix; when thishappens, we still retain the code structure in (15) and select theoptimal code rank by numerically maximizing the actual detec-tion probability in (6).
C. Power-Limited Systems
In this section, we provide sufficient conditions to designLCB-optimal and MI-optimal codes in power-limited systems.We offer the following two results whose proof is reported inAppendix II.
Theorem 7: Assume that the random vector is -uni-tarily-invariant. Then, an optimal code matrix solving (11) with
is given by , where
(16)
In (16), , where and aregiven by
(17)
while must satisfy (51) reportedin Appendix II.
Theorem 8: Assume that the random vector is -uni-tarily-invariant. Then, an optimal code matrix solving (11) with
is given by , where
(18)
and must satisfy the following conditions:
if
if
(19)
for . In (19), is a positive constant computed suchthat , while
(20)
with independent and iden-tically distributed (i.i.d.) circularly symmetric Gaussian randomvariables with zero mean and unit variance.
Remark 4: In power-limited systems, both the LCB-optimalcode in (16) and the MI-optimal code in (18) employ at mostthe first antennas for transmission and adopt the same setof temporal codewords (namely, the eigenvectors of corre-sponding to the smallest eigenvalues). These two solutions onlydiffer in the amount of power transmitted by each sensor. Un-fortunately, there is no simple closed-form expression for theoptimal powers in (16) and (18).
D. Further Discussions on Theorem 8
Computing the MI-optimal powers from (19) is akin tothe mercury/waterfilling problem studied in [9] for parallelGaussian channels with arbitrary input distributions. Differentlyfrom the scenario in [9], however, we allow some correlationamong the entries of the random vector as specified by (12).To gain insights into the structure of MI-optimal codes and tohighlight the implications of allowing correlation among theentries of , we first specialize the solution in (18) and (19)to the case of Gaussian scattering and, then, we investigateasymptotic expansions in the limit of vanishingly small andincreasingly high signal-to-clutter ratios.
For a Gaussian scattering model, we offer the followingresult.
Proposition 1: Let be a jointly Gaussian -unitarily-in-variant random vector with zero-mean and covariance matrix8
. Then, we have
(21)
where are the squared singular values of the matrixand are the eigenvalues of (listed ac-
cording to multiplicity). Furthermore, the optimal code matrix
solving (11) is , where , , and aredefined as in (18) and must satisfy the followingconditions:
if
if(22)
for .Proof: Since is jointly Gaussian, we have
(23)
(24)
8A zero-mean jointly-Gaussian random vector ��� is �-unitarily-invariantiff �������� � � ��� � � for some positive-definite matrix ��� � .Moreover, the Gaussian assumption and the structure of the correlation matriximply that we have independence between any two rows of the random matrix���� � � � � � ��� �, while we allow correlation among its columns.

5828 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
where (24) follows from a well-know property of the eigen-values of a Kronecker product [10].
Property 1: Let be a matrix with eigenvalues. Let be a matrix with eigenvalues .
The eigenvalues of (listed according tomultiplicity) are with and .
Finally, conditions in (22) follow immediately using standardtechniques.
Some remarks are now in order. Notice first that conditions in(22) boil down to the classical waterfilling solution discussed in[4] and [5] if , i.e., for uncorrelated Gaussian scat-tering. For a nonscalar positive definite , instead, conditionsin (22) admit the mercury/waterfilling graphical interpretationsuggested in [9]. Specifically, the optimality conditions in (22)are equivalent to requiring that if ; other-wise, must satisfy
(25)
where is the -transform of thedeterministic matrix [20]. Following the same stepsgiven in [9, Sec. V.B], denote by the inverse of the func-tion with domain equal to and
; also, define
(26)
such that, for the scalar matrix , forall . It can be verified that is a monotonically decreasingfunction; also, we have
(27)
Thus, the mercury/waterfilling illustrated in [9] specializes toour case as follows.
1) For each of the modes corresponding to the smallesteigenvalues of , set up a unit-base vessel solid up to aheight .
2) Choose and pour mercury onto each of the vessels untilits height (including the solid) reaches .
3) Waterfill with a volume of water equal to and adjustto ensure that the level of water in all vessels reaches .
4) The water level over the mercury on the th vessels gives.
If we remove the Gaussian assumption but we keep the inde-pendence among the rows of the random matrix ,then the above mercury/waterfilling procedure still applies afterreplacing in (26) with the inverse (with respect to com-position) of the function
(28)
Again the domain of equals and .
Notice that, as long as the rows of the random matrixare independent, the graphical interpretation of
the mercury/waterfilling also provides an operational meansto compute the MI-optimal powers. The key point here isthat the amount of mercury poured in each vessel dependson the water level and on the noise level , but doesnot depend on the other powers . Conversely, ifthe rows of are uncorrelated but dependant, theequality in (28) does not hold anymore: hence, the height ofsolid-plus-mercury in each vessel will depend upon the powersin the other vessels and the mercury/waterfilling graphicalinterpretation looses its operational powerfulness.
Finally, let us study the MI-optimal power allocation in theweak-and strong-signal regimes. It is instructive to first considerthe case of Gaussian scattering. We offer the following result,whose proof follows immediately after plugging in (22) the ex-pansions of for large and small .
Proposition 2: Let be a jointly Gaussian -unitarily-in-variant random vector with zero-mean and covariance matrix
. Then, in the limit that , the optimalpower allocation in (18) is
for (29)
Moreover, denote by the geometric multiplicity of the min-imum eigenvalue of . Then, in the limit that ,the optimal power allocation in (18) is
(30)
Notice that the asymptotic expansions in (29) and (30) arenot affected by the second-order statistics of . Surprisinglyenough, the next proposition shows that identical asymptotic ex-pansions are also obtained under any -unitarily-invariant scat-tering distribution, which is an indication of the fact that theMI-optimal solution in (18) and (19) is only weakly affected bythe underlying target model in keeping with previous results in[9]. The proof is reported in Appendix II.
Proposition 3: Let be an -unitarily-invariant randomvector. Then, in the limit that , the optimal powerallocation in (18) is
for (31)
Moreover, denote by the geometric multiplicity of the min-imum eigenvalue of and assume that
for all , where and are some positiveconstants. Then, in the limit that , the optimalpower allocation in (18) is given by
(32)
E. Canonical Form
Finally, it is instructive to compare the optimized codesprovided by the many proposed design criteria. Surpris-

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5829
ingly, it always exists a solution to (10) and (11) in the form
with
(33)
which has a nice physical interpretation. It is sufficient to em-ploy for transmission only the first source nodes. Also, thesetransmit nodes adopt as temporal codewords the eigenvectors
of the clutter covariance matrix correspondingto the smallest eigenvalues and only the amount of power radi-ated by each transmit antenna has to be optimized. The optimalspatial power allocation depends on the adoptedfigure of merit (MI or LCB), on the specified power constraint(power-limited or power-unlimited) and on the underlying scat-tering model. When a code matrix is expressed as in (33), wesay that it is in canonical form.
IV. A CASE STUDY: DETECTION OF
COMPOUND-GAUSSIAN SIGNALS
With reference to model (1), assume that the scattering to-wards the th receive antenna is modeled as
(34)
where are nonnegative (possibly dependant) randomvariables, while is a circularlysymmetric Gaussian vector with zero mean and covariance ma-trix for some positive-definite matrix
. Notice that is a spherically invariant random vector(SIRV) [18], [19], while is an -unitarily-invariant randomvector.9 This model, which has been frequently advocated forinterrupting sensors [21], speech [22], [23], and wireless com-munications [24], has received vibrant attention in past decadesamong detection theorists due to its ability of describing scat-tering from composite surfaces, such as, e.g., targets whose ex-tension is large compared to the carrier wavelength. In our setup,a target generates two scattering phenomena towards antenna, a macroscopic one, reflected by the nonnegative variable ,
containing the gross target characteristics, also referred to as tex-ture, and a microscopic one, the so-called speckle, shoved intothe vector , accounting for the local validity of the centrallimit theorem [25].
For the special case , it is instructive to notice that theLCB under LCB-optimal coding in power-unlimited systemssimplifies to
(35)
where . Application of the Jensen inequalityto the -convex function , , immediately showsthat, inasmuch as LCB is the figure of merit, non-Gaussianity
9Assuming that � � � � � � � are mutually independent and that � � � � � ��
are mutually uncorrelated is not at all necessary for the derivations of the pre-vious sections to apply.
is always detrimental: this is obviously a consequence of thefact that, unless is nonrandom, the entries of (34) are possiblyuncorrelated, but dependent, whereby diversity is endangered.
For the reader sake, we now provide some numericalexamples to illustrate the behavior of the proposed codingstrategies under the SIRV target model. We consider a systemwith and . We assume an exponentiallyshaped clutter covariance matrix withand . The detection threshold is set so as to achieve
. Finally, we assume thatwith ,which yields a -distributed scattering [17], [19]. Our normal-ization ensures that and also that -distributedscattering reduces to Gaussian scattering as .
A. Power Unlimited
We first investigate a power-unlimited scenario. In Fig. 2, wecompare LCB-optimal and MI-optimal coding when and
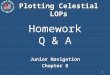
; in particular, we report code rank, LCB, MI, andversus SCR. For the sake of comparison, we also show the per-formances provided by an isotropic transmission (i.e., is ascaled unitary matrix) and by an uncoded transmission (i.e.,has all-equal entries). Several remarks are now in order. Noticefirst that the rank of the LCB-optimal code is an increasing func-tion of SCR; this result reinforces our conjecture that full-rankcoding is LCB-optimal only for sufficiently large SCR’s (in thisexample, we must have SCR 11.8 dB). As expected, LCB-op-timal codes maximize the LCB under the design assumptions,while MI-optimal codes maximize the MI. However, none ofthe proposed coding strategies uniformly (for any SCR) opti-mize the detection probability. Notice that the LCB is a tightapproximation of the detection probability in the high-signalregion and, in this regime, our results indicate that optimizingthe LCB also maximizes the detection probability; interestingly,in this regime, MI-optimal and LCB-optimal codes are equiva-lent for the same semidefinite rank constraint. In the low-signalregime, instead, it is well known in detection theory that a lessand less constrained fluctuation (which corresponds to rank-onecoding) is beneficial. In this region, LCB-optimal coding turnsout to be rank-one, thus outperforming MI-optimal coding as faras detection is concerned. We point out that an uncoded trans-mission (which is also rank-one) provides the same detectionperformance as the LCB-optimal transmission in the low-SCRregime. This is obviously a consequence of the fact that thetwo differ only in the direction wherein the unique transmittedeigenmode lays, namely in the amount of transmit energy nec-essary to obtain the designed received signal-to-clutter ratio: acompletely different behavior will be observed when consid-ering power-limited systems, wherein the constraint concernsthe transmit energy instead. Finally, Fig. 3 compares the detec-tion performance of the MI-optimal codes for different valuesof ; a Gaussian scale is employed here on the -axis to expandthe low-and high-SCR regions. It is clear that the choice of therank constraint plays a pivotal role in the design of MI-optimalcodes, allowing the system designer to trade energy integrationfor angular transmit diversity. In particular, notice that the valueof maximizing the detection probability is an increasing func-tion of SCR, in keeping with previous results in [4] and [5].

5830 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
Fig. 2. Code rank, LCB, MI, and � versus SCR. A power-unlimited scenario is considered with LCB-optimal and MI-optimal coding as specifiedby Theorem 6. System parameters: � � �, � � �, � � �, � � �, � � �� , and � � �.
Fig. 3. � versus SCR. A power-unlimited scenario is considered with LCB-optimal and MI-optimal coding as specified by Theorem 6. Systemparameters: � � �, � � �, � � �, � � �� , and � � �.
In Figs. 4 and 5, we study the performance of LCB-optimalcoding when the Gaussian scattering model (i.e., ) isemployed for STC design, while the SIRV scattering modelis adopted for analysis. In particular, we report the rankof the optimized code matrix, the LCB, and the detectionprobability versus SCR and , respectively. Results are quite
instructive. For the same SCR and , the code rank underGaussian design is equal to or greater than the code rankunder SIRV design. In fact, a SIRV target model makestransmit diversity less rewarding—in keeping with (35)—andhence rank transitions are usually observed at higher valuesof SCR and .

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5831
Fig. 4. Code rank, LCB, and� versus SCR. A power-unlimited scenario is considered with LCB-optimal coding as specified by Theorem 6. Both SIRV scatteringand Gaussian scattering are considered at the design stage. System parameters: � � �,� � �, � � �, � � �, � � �� , and � � �.
Fig. 5. Code rank, LCB and � versus �. A power-unlimited scenario is considered with LCB-optimal coding as specified by Theorem 6. Both SIRV scatteringand Gaussian scattering are considered at the design stage. System parameters: � � �,� � �, � � �, � � �, � � �� , and SCR � � ��.
B. Power Limited
We now move on to the case of power-limited systems,wherein the performance gains granted by optimum coding isexpected to be visibly larger. In Fig. 6, we compare LCB-op-timal and MI-optimal coding when and . For each
solution, we report code rank, LCB, MI, and versus .For the sake of comparison, we also show the performancesprovided by isotropic and uncoded transmissions. It is seen thatthe code rank is an increasing function of under both de-sign criteria and that LCB-optimal coding uniformly providessuperior detection capabilities than MI-optimal coding in the

5832 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
Fig. 6. Code rank, LCB, MI and � versus ��� . A power-limited scenario is considered. The LCB-optimal code is given by Theorem 7, while the MI-optimalcode is given by Theorem 8. System parameters: � � �, � � �, � � �, � � �, � � �� , and � � �.
Fig. 7. Code rank, LCB and � versus ��� . A power-limited scenario is considered with LCB-optimal coding as specified by Theorem 7. Both SIRV scatteringand Gaussian scattering are considered at the design stage. System parameters: � � �, � � �, � � �, � � �, � � �� , and � � �.
range of reported ’s; this is in contrast with what previ-ously observed in power-unlimited systems. Notice that bothMI-optimal and LCB-optimal coding outperform isotropic anduncoded transmissions. Also, isotropic transmission becomesequivalent to MI-optimal coding in the large SCR regime, inkeeping with the asymptotic analysis in Section III-D.
Finally, Figs. 7 and 8 show the performances of LCB-op-timal and MI-optimal coding, respectively, when the Gaussianscattering model is employed at the design stage, while theSIRV scattering model is adopted for analysis. Under MI-op-timal coding, Fig. 8 confirms that Gaussian and non-Gaussiandesigns asymptotically provide the same performances in the

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5833
Fig. 8. Code rank, MI and � versus ��� . A power-limited scenario is considered with MI-optimal coding as specified by Theorem 8. Both SIRV scatteringand Gaussian scattering are considered at the design stage. System parameters: � � �, � � �, � � �, � � �, � � �� , and � � �.
weak-signal and strong-signal regimes, which is in agreementwith our theoretical analysis in Section III. More generally,notice that assuming a Gaussian scattering model for codedesign results in small mismatch losses under both designcriteria and all operating regimes.
V. CONCLUSION
In this paper, we have studied a MIMO detection problemwith transmit antennas and receive antennas (not neces-sarily colocated) under non-Gaussian target scattering and tem-porally correlated Gaussian clutter. We have considered twofigures of merit for signal waveform design: the lower Cher-noff bound (LCB) to the detection probability for fixed prob-ability of false alarm and the MI between the received signaland the target response under . Under suitable conditions ofunitary invariance on the scattering distribution, we have de-rived new results on the concavity and Schur concavity of theLCB and MI, and we have derived sufficient conditions to de-sign MI-optimal and LCB-optimal codes under both receive andtransmit power constraints. The solution to the many proposeddesign criteria can always be recast in a canonical form whereinthe source nodes adopt as temporal codewords the eigenvectorsof the clutter covariance matrix corresponding to the smallesteigenvalues, while only the amount of power radiated by eachtransmit antenna has to be optimized. We have derived suffi-cient conditions to compute the optimal spatial power alloca-tion based on the adopted figure of merit, on the specified powerconstraint and on the underlying scattering model; closed-formexpressions for the MI-optimal power allocation have also beenderived in the limit of vanishingly small and increasingly high
signal-to-clutter ratios. As an illustrative example, we have in-vestigated the detection of a compound Gaussian target. Ourresults reveal that LCB-optimal coding is usually preferable toMI-optimal coding as far as detection performance is concerned.Also, assuming (uncorrelated) Gaussian scattering at the codedesign stage results in small mismatch losses in terms of LCB,MI and detection probability.
APPENDIX IPRELIMINARY RESULTS ON MAJORIZATION THEORY
Definition 2 [26]: For any vector, let indicate its components in decreasing
order.
Definition 3 [26, 1.A.1]: For any two vectors ,one says that the vector majorizes the vector (or that thevector is majorized by the vector ) and writes (or
) if for and.
Definition 4 [26, 3.A.1]: A real-valued function definedon a set is said to be Schur convex on if on
. In addition, if wheneverbut is not a permutation of , then is said to be strictly
Schur convex on . The function is (strictly) Schur concaveon if is (strictly) Schur convex on .
Definition 5: Let be an open interval and considera function . is called a symmetric functionif , , where denotes any permu-tation of .
Lemma 1 [26, 2.B.1]: For any two vectors sat-isfying , there exists a finite sequence of -transforms

5834 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
such that and . A -transform of thevector is defined as [26, p. 21]
for some and some indices .
Lemma 2 [27]: If the random vectoris exchangeable (i.e., the joint pdf of its elements is invariant
to the permutations of its arguments) and for, then
is Schur convex in over the region where the expec-tation exists.
APPENDIX IIPROOFS OF THE THEOREMS
1) Proof of Theorem 1: Let
(36)
wherein has been defined in (4). We can write
(37)
where we have defined andfor . From (37), Theorem 1
follows immediately.2) Proof of Theorem 2: From (37), we have
where andfor . Since is -unitarily-invariant by hypoth-esis, the random vector is exchangeable and, hence, isa symmetric function of (see Definition 5). Finally,the Schur convexity follows from Lemma 2.
3) Proof of Theorem 3: Under , model (1) yields
(38)
where and are defined in (4), is given by (36), andfor are independent circularly
symmetric white Gaussian vectors.
Let and; since is a
Markov chain and the matrix is deterministic, from[13], we have that
(39)
By applying the results of [28] and [29], we now obtain
where is the minimum mean square error(MMSE) in estimating from , i.e.,
(40)
To prove -concavity, we now give the following result.10
Theorem 9: The Hessian of exists at eachpoint in and is negative semidefinite.
Proof: From the fact that is smooth[28, Corollary 1], it follows that belongs to theset of functions. Moreover, using (40) and following thesame incremental noise technique of [31], we can show that
Hence, after simple algebraic manipulations, we have
4) Proof of Theorem 4: Let be defined as in(39). Symmetry simply follows from the -unitary-invarianceof . As to the Schur concavity, it is sufficient to prove that
whenand differs from by only two compo-
nents, as a consequence of Lemma 1. Thus, with no loss of gen-erality, we can assume .
If , from Lemma 1, we have
for some . Schur concavity now simply follows fromconcavity in Theorem 3 and symmetry.
5) Proof of Theorem 5: Let be equal to
or , and let with
10An equivalent formulation of Theorem 9, using standard derivation tech-nique, is also given in [30], in terms of differential entropy.

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5835
, ,[10], and . Since is -uni-
tarily-invariant by hypothesis, the right singular vectors ofdo not play any role into the optimizations (10) and (11).
Assuming , we have
with .Let be a diagonal matrix with all the diagonal
elements equal to but the th diagonal element which is equalto . Let indicate the eigenvalues of the
Hermitian matrix in decreasing order. We have
(41)
(42)
(43)
Inequality (41) follows from the Schur convexity of(see Theorem 2) and from the fact that
[26]; inequality (42) follows from theconvexity of (see Theorem 1); finally, (43)follows from the fact that the matrices and have thesame eigenvalues. Similarly, we have that
(44)
(45)
(46)
wherein now (44) follows from the Schur concavity of(see Theorem 4), while (45) follows from the
concavity of (see Theorem 3). Hence, nullingoff the off-diagonal elements of the th column and the throw of the matrix can only decrease the functionand increase the function . Repeating this process for
, we find that is minimized andis maximized when is diagonal.
Finally, notice that the semidefinite rank constraintimplies that singular values of
must be necessarily zero. Since both and
are symmetric functions of (seeTheorems 2 and 4), we can always reorder the singular valuesto have . This concludes the proof.
6) Proof of Theorem 6: Theorem 5 ensures that there existsan optimal solution to (10) such that
with to be determined. If ,then the thesis simply follows from the Schur concavity of theMI in Theorem 4. Consider instead the case .Since is a symmetric function of the squared sin-gular values of (see Theorem 2), the optimalvalues of can be found by solving the followingsubproblems:
and
(47)
for . Since is a Schur convex (see Theorem2) function of for any , the objective functionin (47) achieves its minimum value when
Finally, the optimal code rank is given by (14).7) Proof of Theorem 7: Any code matrix satisfying the
semidefinite rank constraint in (11) can be decomposed as
, where ,and [10]. Also, Theorem 5 ensures that
there exists an optimal solution to (11) such that ,and
where is a permutation matrix to be determinedand . Since the
is a strictly decreasing, symmetric function of thesquared singular values of (see Theorems 1 and 2), itis optimal to assume . Instead, the optimal power vector
must solve the following problem:
(48)

5836 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
In order to find a solution to (48), let us consider the followingsubproblems:
(49)where is an arbitrarily small positive con-stant and . Notice that (49) is aconvex minimization. Hence, an optimal solution
can be foundby solving the Karush–Kuhn–Tucker (KKT) conditions [32]
where and are nonnegativeLagrange multipliers, while we have (50), shown at the bottomof the page. Since the objective function in (49) is maximizedwhen the power constraint is met with strict equality, we musthave
if
if
(51)
for and such that. Finally, the solution to (48) is
where and and are givenby (17).
8) Proof of Theorem 8: From Theorems 3 and 5, itis easily seen that an MI-optimal code can be decomposed
as , where ,, and .
Let ,where and
are independent circularly symmetric Gaussian vec-tors with zero-mean and identity covariance ma-trix. Let and
. As in (39),
we can now write
and the optimal
can be computed as the solu-tion to the following concave maximization problem:
(52)
To solve (52), we leverage the technique adopted in [9]. Inparticular, must satisfy the following KKT conditions [32]:
where and are nonnegative Lagrange multipliers,while [28], [29]
Since the objective function in (52) is maximized when thepower constraint is met with strict equality (indeed, the MI isstrictly increasing with respect to ), we must have
if
if
for and such that .9) Proof of Proposition 3: Assume first that .
If for all , where and
(50)

AUBRY et al.: ON MIMO DETECTION UNDER NON-GAUSSIAN TARGET SCATTERING 5837
are some positive constants, then the MI admits the followingasymptotic expansion [33, Corollary 2]:
(53)
From (23), it follows immediately that (53) coincides with theasymptotic expansion of the MI under Gaussian scattering.Hence, the thesis simply follows from Proposition 2.
Next, assume that . To prove the thesis, we firstverify that
asymptotically satisfies the KKT conditions given in (19). FromProposition 4 (which is reported next without proof), we havefor large that
for . Hence, the KKT conditions in (19), evaluatedat , can be asymptotically rewritten as
for , with such that
Finally, we invoke the uniqueness of the optimal solution to con-clude that is actually the optimal power allocation.
Proposition 4: Let be-unitarily-invariant and let
where , while arei.i.d. white Gaussian random vectors. Then, for large
, admits the following asymptoticexpansion:
where and is a positive constant inde-pendent of .
REFERENCES
[1] E. Fishler, A. Haimovich, R. Blum, L. Cimini, D. Chizhik, and R.Valenzuela, “Spatial diversity in radars—Models and detection perfor-mance,” IEEE Trans. Signal Process., vol. 54, no. 3, pp. 823–838, Mar.2006.
[2] A. De Maio and M. Lops, “Design principles of MIMO radar detec-tors,” IEEE Trans. Aerosp. Electron. Syst., vol. 43, no. 3, pp. 886–898,Jul. 2007.
[3] A. De Maio and M. Lops, “Space-time coding in MIMO radar,” inMIMO Radar Signal Processing, Jian-Li and P. Stoica, Eds. NewYork: Wiley, 2009.
[4] A. De Maio, M. Lops, and L. Venturino, “Diversity-integration trade-offs in MIMO detection,” in Proc. IEEE Int. Symp. Inf. Theory, Toronto,ON, Canada, Jul. 2008, pp. 594–598.
[5] A. De Maio, M. Lops, and L. Venturino, “Diversity-integration trade-offs in MIMO detection,” IEEE Trans. Signal Process., vol. 56, no. 10,pp. 5051–5061, Oct. 2008.
[6] L. Zheng and D. Tse, “Diversity and multiplexing: A fundamentaltradeoff in multiple antenna channels,” IEEE Trans. Inf. Theory, vol.49, no. 5, pp. 1073–1096, May 2003.
[7] D. Tse and P. Viswanath, Fundamentals of Wireless Communication.Cambridge, U.K.: Cambridge Univ. Press, 2005.
[8] E. Biglieri, R. Calderbank, A. Costantinides, A. Goldsmith, A. Paulraj,and H. Poor, MIMO Wireless Communications. Cambridge, U.K.:Cambridge Univ. Press, 2007.
[9] A. Lozano, A. M. Tulino, and S. Verdú, “Optimum power allocationfor parallel Gaussian channels with arbitrary input distributions,” IEEETrans. Inf. Theory, vol. 52, no. 7, pp. 3033–3051, Jul. 2006.
[10] R. A. Horn and C. R. Johnson, Matrix Analysis. Cambridge, U.K.:Cambridge Univ. Press, 1993.
[11] H. L. V. Trees, Detection, Estimation, and Modulation Theory—PartIII. New York: Wiley, 2001.
[12] J. G. Proakis, Digital Communications, 4th ed. New York: Mc-Graw-Hill, 2001.
[13] T. M. Cover and J. A. Thomas, Elements of Information Theory. NewYork: Wiley, 1991.
[14] M. R. Bell, “Information theory and radar waveform design,” IEEETrans. Inf. Theory, vol. 39, no. 5, pp. 1578–1597, Sep. 1993.
[15] Y. Yang and R. S. Blum, “MIMO radar waveform design based on mu-tual information and minimum mean-square error estimation,” IEEETrans. Aerosp. Electron. Syst., vol. 43, no. 1, pp. 330–343, Jan. 2007.
[16] N. Levanon, Radar Principles. New York: Wiley, 1988.[17] E. Conte, M. Di Bisceglie, M. Longo, and M. Lops, “Canonical detec-
tion in spherically invariant noise,” IEEE Trans. Commun., vol. 4, no.234, pp. 347–353, Feb./Mar./Apr. 1995.
[18] K. Yao, “A representation theorem and its applications to spherically-invariant random processes,” IEEE Trans. Inf. Theory, vol. IT-19, no.5, pp. 600–608, Sep. 1973.
[19] M. Rangaswamy, “High-level adaptive signal processing architecturewith applications to radar non-Gaussian clutter: Sherically invariantrandom processes for radar clutter modeling, simulation and distribu-tion identification,” Rome Lab., Air Force Material Command, GriffisAir Force Base, New York, Tech. Rep. 19951109–096, 1995.
[20] A. Tulino and S. Verdù, Random Matrix Theory and Wireless Commu-nications. Boston, MA: Now, 2004.
[21] L. M. Garth and H. Poor, “Detection of non-Gaussian signals: A para-digm for modern statistical signal processing,” Proc. IEEE, vol. 82, no.7, pp. 1061–1085, Jul. 1994.
[22] H. Brehm, “Description of spherically invariant random processes bymeans of G-functions,” in Combinatorial Theory, ser. Lecture Notesin Mathematics, Jungnickel and K. Vedder, Eds. Berlin, Germany:Springer-Verlag, 1982, pp. 39–73.
[23] H. Brehm and W. Stammler, “Description and generation of spher-ically invariant speech-model signals,” IEEE Trans. Signal Process.,vol. SP-12, no. 3, pp. 119–141, Mar. 1987.

5838 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 56, NO. 11, NOVEMBER 2010
[24] A. Abdi, H. A. Barger, and M. Kaveh, “Signal modelling in wirelessfading channels using spherically invariant processes,” in Proc. IEEEInt. Conf. Acoustic Speech Signal Process., Hong Kong, Jun. 2000, vol.5, pp. 2997–3000.
[25] E. Jakeman and P. N. Pusey, “A model for non-Rayleigh sea echo,”IEEE Trans. Antennas Propag., vol. AP-24, no. 6, pp. 806–814, Nov.1976.
[26] A. W. Marshall and I. Olkin, Inequalities: Theory of Majorization andIts Applications. New York: Academic, 1979.
[27] A. W. Marshall and F. Proschan, “An inequality for convex functionsinvolving majorization,” J. Math. Anal. Appl., vol. 12, pp. 87–90, 1965.
[28] D. Guo, S. Shamai (Shitz), and S. Verdú, “Mutual information andminimum mean-square error in Gaussian channels,” IEEE Trans. Inf.Theory, vol. 51, no. 4, pp. 1261–1282, Apr. 2005.
[29] D. P. Palomar and S. Verdú, “Gradient of mutual information in linearvector Gaussian channels,” IEEE Trans. Inf. Theory, vol. 52, no. 1, pp.141–154, Jan. 2006.
[30] M. Payaró and D. P. Palomar, “A multivariate generalization ofCosta’s entropy power inequality,” in Proc. IEEE Int. Symp. Inf.Theory, Toronto, ON, Canada, Jul. 2008, pp. 1088–1092.
[31] D. Guo, S. Shamai (Shitz), and S. Verdú, “Estimation of non-Gaussianrandom variables in Gaussian noise: Properties of the MMSE,” inProc. IEEE Int. Symp. Inf. Theory, Toronto, ON, Canada, Jul. 2008,pp. 1083–1087.
[32] S. Boyd and L. Vanderberghe, Convex Optimization. Cambridge,U.K.: Cambridge Univ. Press, 2004.
[33] V. Prelov and S. Verdú, “Second-order asymptotics of mutual infor-mation,” IEEE Trans. Inf. Theory, vol. 50, no. 8, pp. 1567–1580, Aug.2004.
Augusto Aubry received the Dr. Eng. degree (summa cum laude) in telecom-munication engineering from the Università degli Studi di Napoli “Federico II,”Napoli, Italy, in 2007, where he is currently working towards the Ph.D. degree ininformation and telecommunication engineering at the Department of BiomedicElectronic and Telecommunication Engineering.
His research interests are in information theory and signal processing.
Marco Lops (M’96–SM’01) was born in Naples, Italy, on March 16, 1961. Hereceived the “Laurea” degree in electronic engineering and the Ph.D. degree inelectronic and computer engineering from the Università degli Studi di Napoli“Federico II,” Napoli, Italy, in 1986 and 1992, respectively.
He was an Assistant Professor (1989–1991) and an Associate Professor(1991–2000) at the Università degli Studi di Napoli “Federico II.” Since March2000, he has been a Professor at the Università degli Studi di Cassino, Cassino(FR), Italy and, since 2009, also at ENSEEIHT, Toulouse, France. In fall 2008,he was a Visiting Professor with the University of Minnesota, and in spring2009, at Columbia University. His research interests are in detection andestimation, with emphasis on communications and radar signal processing.
Antonia M. Tulino (M’00–SM’05) received the Ph.D. degree from theElectrical Engineering Department, Seconda Università degli Studi di Napoli,Napoli, Italy, in 1999.
She has served as an Associate Professor at the Department of Electrical andTelecommunications Engineering, Università degli Studi di Napoli “FedericoII,” Napoli, Italy, since 2002. She is currently with the Department of WirelessCommunications, Bell Laboratories, Alcatel-Lucent, Holmdel, NJ. She held re-search positions at the Center for Wireless Communications, Oulu, Finland andat the Department of Electrical Engineering, Princeton University, Princeton,NJ. She has served on the Faculty of Engineering, Università degli Studi delSannio, Benevento, Italy. Her research interests lay in the broad area of commu-nication systems approached with the complementary tools provided by signalprocessing, information theory, and random matrix theory
Dr. Tulino received the 2009 Stephen O. Rice Prize in the Field of Com-munications Theory for the best paper published in the IEEE TRANSACTION
ON COMMUNICATIONS in 2008. She is a frequent contributor to the IEEETRANSACTIONS ON INFORMATION THEORY, the IEEE TRANSACTIONS ON
COMMUNICATIONS, and the IEEE TRANSACTIONS ON SIGNAL PROCESSING.
Luca Venturino (S’03–M’06) received the Ph.D. degree in electrical engi-neering from the Università degli Studi di Cassino, Cassino (FR), Italy, in 2006.
In 2004 and 2009, he was a Visiting Scholar with the Department of ElectricalEngineering, Columbia University, New York, NY. He had short-term visitingappointments at the NEC Laboratories America (NECLA), Princeton, NJ, in2006, 2007, and 2008. Currently, he is an Assistant Professor with the Univer-sità degli Studi di Cassino. His research interests include signal processing forwireless communications and signal detection/tracking in radar systems.