Embed Size (px)
Citation preview

Malaviya National Institute of Technology, Jaipur

BAJA SAE INDIA DESIGN REPORT
Team registration ID : 57920
Author : Upendra Yadav
Co-Author : Kartikey Sharma
Author’s Mail Id: [email protected] , [email protected]
Baja is an international event sponsored by Mahindra and Mahindra. Engineering students are given a challenge to design, simulate and manufacture a “fun to drive”, versatile, safe, durable, and high performance off road vehicle. Our team “MNIT Racetrack Raiders” consist of 25 members from mechanical engineering department of our college who are fully dedicated to there work. Our main focus was to improve the previous version and to put some innovation in it to make it perform more effective and efficient. We are putting our full effort to make our vehicle perform best in every section of event.
1. Engine of Briggs and Stratton engine with 10 HP OVH
305 intek model: 205432
Power 8 Kw or 10hp at rpm
Maximum Torque 18.6N-m at 2520 rpm
Swept volume 305cc
2. Rear wheel drive using M & M champion gearbox with 3 forward and 1 reverse gear connected with engine through a coupler.
3. Suspension system of double wishbone and ALTO’s knuckle along with some modifications is used. Negative camber of 2 degrees is provided in front suspension. Ground clearance of 12 inches is provided.
4. ALTO’s tires in the front with 23 inches of diameter while BAJA Trax Tires with 25 inches of diameter in the rear.
5. Unlike convention two brake pedals are provided, one to operate only rear wheels
6. and one to operate all the wheels. Hydraulic disc brakes with ethylene glycol are there.
7. Anti-Ackermann steering geometry is provided along with adjustable steering mechanism for safety purpose of driver.
8. Dimensions:
9. Vehicle’s estimated total weight is 270kg.
Our main purpose behind making this vehicle is to achieve the following performance targets:
Speed- 60 km/hr. Weight- 280 kg Ground clearance- 12 inches Stopping distance- 1.5m Deceleration- 5.88 m/s2 Turning radius- 100 inches.
INTRODUCTION
TECHNICAL SPECIFICATIONS:
VEHICLE PERFORMANCE:

Design consideration:
Weight of roll cage = 7o kg Length of Material (including scrap) = 71 No. of weld joints = 61 Total Weld Length = 10.47 m Welding Equipment =7000 Rs. Miscellaneous = 3000 Rs. Estimated Cost of Manufacturing = 25000 Rs.
Material used:
1018 Mild Steel tubes with O.D. 1 inch and Thickness 0.120 inch
3D VIEW:
ROLL CAGE

Material properties and selection criteria:
Chemical properties (weight %) :
Element AISI 4130 1018 mild steel
C 0.28-0.33 0.14-0.20
Mn 0.40-0.60 0.6-0.9
P 0.035 (max) 0.04 (max)
S 0.04 (max) 0.05 (max)
Si 0.15-0.30 -
Cr 0.80-1.10 -
Mo 0.15-0.25 -
Fe - 98.81-99.26
Mechanical Properties:
Property AISI 4130 1018 Mild Steel
Yield strength 370.8 MPa 365 MPa
Ultimate tensile
strength
446.89 MPa 440 MPa
Elongation % 30 % 15 %
Poisson ratio 0.27-0.30 0.29
Density 7.7-8.0 g/cc 7.87 g/cc
Modulus of
elasticity
205 GPa 205 GPa
Weight / meter 1.1 Kg (thickness=
0.083 inch)
1.6 Kg
(thickness= 0.12
inch)
Other factors:
Factors AISI 4130 1018 Mild Steel
Overall Cost Around Rs. 25000 Around Rs. 8000
Availability Not in North India. Very few dealers in South with
monopoly.
Easily available
FEA results:
Front impact –
We have applied a standard force of 10G. Which in our case comes out to be
10*350*9.8 =34300N. Roll cage was constrained from the critical points of RRH and standard force was applied on the front portion of roll cage. Von misses stress diagram was obtained as shown.
Maximum deflection obtained was 0.722e-03. Max stress obtained is 53851

Side Impact—
We have applied a standard force of 5G .Which in our case comes out to be 5*350*9.8 = 17150N. Standard force was applied on the SIM and lower frame of roll cage, von misses stress diagram was obtained as shown.
Maximum deflection obtained was73709. Max stress obtained is.00505.
Roll over—
We have applied a standard force of 5G .Which in our case comes out to be 5*350*9.8 = 17150N. Standard force was applied on the front top portion of roll cage at an angle of 45 degrees from the vertical. Von misses stress diagram was obtained as shown. Maximum deflection obtained was 0.678-03. Max stress obtained is 37955
Front and rear bump test-

Static 2.5G force is applied on front and rear suspension support.
Design iterations:
1. It is most compact. We have kept the dimensions to minimum simplicity.
2. The more it is simple more it becomes easy to fabricate symmetry.
3. Lower base and upper base of roll cage are kept almost mirror image of each other so it is easy at the same time applying sheets would be easier.
4. Continues members are there as far as possible.
Driver Ergonomics:
Development of posture-prediction models for vehicle occupants is an important component of driver ergonomics research. The objective is to predict the postures that people will choose as a function of comfort to the occupant.
Driver seat is inclined at an angle of 15 degrees from vertical. By placing the driver's seat in inclined position, comfort is attained on the area of legs between hips and toes. Also this posture requires less space since an inclined leg occupies less length than a fully stretched one.
Also the seat is been off-setter from RRH minimizing the heat conduction through firewalls.
Brakes and clutch paddles are at a distance of 42 inch from centre of driver’s seat.
Seat is itself provided with Head-rest whose thickness being 3.5 inch.
Steering is made adjustable so that driver can adjust it according to his comfort during endurance tests.
Hence we performed multiple trial-and-error tests to find the optimal angle in such a way that the terrain is visible to driver along with maximizing the comfort to the driving. The key advantage of this approach over alternatives is that it provides optimal accuracy for the most important aspects of posture for vehicle design, typically hip and eye locations.
Design
Rack and Pinion Steering
Recirculating Ball Steering
Electronic Power Steering
Hydraulic Power Steering
Feedback 9 8 9 10
Ease of Operation
8 8 10 9
Maintenance
9 8 8 5
Cost 10 9 6 7
Equitableness
10 10 9 7
Total 46 43 42 38
Based on our decision matrix, we chose to use a rack and pinion system. A 14 inch rack and pinion system with a steering ratio of 14.5 : 1 (that of maruti alto) was selected for the steering of the vehicle. This industry-proven steering method is reliable and was chosen to ensure the safety of the driver.
While designing the steering system the constraints that we possessed were centre alignment of steering system, track width, human effort at steering wheel and the desired response of steering system.
This system was properly machined and was centered as per the dimensions of our vehicle. The position of the steering rack was carefully positioned for movement over the suspension's entire arc to avoid any bump steer.
Geometry
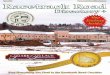
We chose to have Ackerman steering geometry. The intention of Ackermann geometry is to avoid the need for tires to slip sideways when following the path around a curve. Exact calculation shows the geometry is nearly Ackerman. The geometry is closely achieved by a trapezoidal arrangement. When the wheels are steered to left or right, the asymmetry causes inside wheel to steer
STEERING DESIGN REPORT

to a greater angle than the outside wheel, thus causing the vehicle to turn about a common center of rotation of all four wheels. Therefore the vehicle turns around a common center and a common radius. The turning radius of the vehicle as calculated was found.
The ackerman turning geometry diagram
Ackermann steering geometry is a geometric arrangement of linkages in the steering of a car designed to solve the problem of wheels on the inside and outside of a turn needing to trace out circles of different radii. Inside wheel turns at lower radius and outside wheel traverse a greater radius.
Differential steer from a trapezoidal tie-rod arrangement
DESIGN COSIDERATIONS:
To retard the vehicle To have the proper control of vehicle. To bring it to standstill.
BRAKE SYSTEM DESIGN DETAILS:
The main aspects in brakes design are-+
1. Effective braking performance in minimum distance 2. Reduce braking effort 3. Resistant to abrasion and brake fade 4. Should work effectively even in hostile conditions of
track 5. Light in weight
Apparatus used:-
4 Disc Rotors,
4 calipers,
2 tandem master cylinders,
brake lines and proportional valve.
While designing the brake system, simplicity and efficiency were given prime importance. We have decided to use disc brakes operated hydraulically on all four wheels best suited for our vehicle due to the various problems associated with drum brakes as discussed below:-
Drum brakes are apt to overheat, which can cause the shoes to distort and cause vibration to the entire braking system.
Overheating can also cause brake fade. The heat from the braking can cause the shoes to lose their gripping abilities, meaning that the brakes may not be able to grip and braking may not occur.
Drum brakes are not as easily service as the Disc type. Drum brakes on the other hand are a much heavier
brake type than disc brakes. Debris and stones can restrict the smooth working of
drum brakes.
We will be using dual circuit tandem master cylinder, diagonal split braking system. Because dual circuit master cylinder will ensure the application of brake in the case of leakage of brake line. Two independent diagonal lines are used, in order to provide braking in case of failure of one line. Braking system be vacuum assisted to reduce the braking effort.
Initially, static and dynamic normal forces were calculated using the weight of the vehicle and the relationship of the centre of gravity to the overall length and width of the vehicle. These forces were multiplied with coefficient of friction to obtain brake force.
Front axle dynamic load = W1+ (a/g)*(H/L)*W Rear axle dynamic load = W2− (a/g)*(H/L)*W
BRAKE DESIGN REPORT

CALCULATIONS:
Input Data
Master Cylinder Diameter (mm) 19.08
Caliper Piston Diameter (mm) 30
Knee Pressure 29 kgf/cm2
Maximum velocity assumed 60km/hr. = 16.67 m/s
Deceleration 5.88 m/s2
Front Disc Radius (mm) 225
Rear Disc Radius (mm) 225
Coefficient of Friction disc/pad 0.6
Weight of Vehicle (kg) 360
Wheelbase (mm) 1225
Pedal ratio 4:1
Height of COG from ground (mm)
350
Coefficient of friction tyre/road
COG from front wheel centre (mm)
1020
COG from rear wheel centre (mm)
510
All the calculations done assuming the speed to be highest i.e. 60 km/hr
Heat dissipation: H = (m*v*v)/2 H= heat dissipated = (350*16.67*16.67)/2 m= mass of vehicle (kg) = 50000 J v= velocity of vehicle (m/s)
Brake balance: Front axle load = W1 + (a/g)*(H/L)*W Rear axle load = W2 – (a/g)*(H/L)*W
= 120 + 0.55*(14/60)*360 = 240 – 46.2 = 166.2 kg = 193.8 kg
Relative height of COG: X = H/Wb X = relative height of COG = 0.350/1.525 H = vertical height of COG to ground (m) = 0.23 Wb = wheelbase Braking force: BF = Mag BF = braking force = 360*0.55*9.8 M = mass of vehicle = 1940.4 N A = deceleration (g units) G = acceleration due to gravity Dynamic axle load: Mf = ((1-ψ) + (Xa)) M : ψ = Mr/M = 240/360 = 2/3 Mr = static rear axle load Mf = 165.54 Kg M = total vehicle mass A = deceleration (g units) M = total vehicle mass Mf = dynamic front axle load Wheel lock force: F =Mf*g*µr Mf = dynamic axle mass = 165.5*9.8*0.8 G = acceleration due to gravity = 1300 N µr = coeff. Of friction between road and tire Stopping distance: Aa = V/((v/a) + 0.3g) Aa = average deceleration for whole stop = 0.5 V = test speed A = deceleration S = v*v/2gAa G = acceleration due to gravity = 28 m S = stopping distance
DESIGN CONSIDERATIONS: T h e o v e r a l l p u r p o s e i s t o p r o v i d e c u s h i o n i n g a c t i o n t o t h e driver by absorbing the shocks from the road and also help the tires to maintain good traction. We complete this objective by
SUSPENSION

performing different test like: Ball joint play test, Bounce test Stress Analysis, spring succumb test and choosing unequal parallel arm double wishbone suspension for both front and rear. The shocks will be set to provide the proper dampening and spring coefficients to provide a smooth and well performing ride.
CONSTRAINTS and DESIGN SELECTION CRITERIONS:
Weight, Ground clearance required, and space limitation
Weight of vehicle 270Kg
Driver with accessories 80Kg
Total weight with driver 350Kg
Sprung masses 280kg
Unsprung masses 70kg
Ground clearance 12 inches or 304.8 mm
Reason:
Wishbone suspension give more movement of the tires and hence the vehicle for the same movement of the spring
Independent suspension
In double wishbone suspension force is distributed at 5 points on roll cage unlike at 1 point in Mc person strut(used at rear suspension last year)
It can be slightly adjusted for different parameter of suspension tuning like camber angle, ground clearance at the time of testing and finalized
Adjustable suspension arms that is variable length of arms allows us to manually adjust camber and toe angles
SLA(short long arms suspension ,unequal length double wishbone suspension) due to this suspension there is no excessive tire scrubbing SPECIFICATIONS: FRONT SUSPENSION SPECIFICATIONS:
Double wish bone Front
upper arm length 13inches
Lower arm length 15.5inches
Roll centre height 6inches
Motion ratio(suspension travel/wheel travel)
.7
Suspension frequency 1.1hz
Total wheel travel 8inches
Shocker travel 5.6inches
Spring constant(k) 19N/mm
Caster +5degree
Camber -2degree
King pin 12degree
Scrub radius .5inches
Toe -
Front Upper Suspension Arm
Front Lower Suspension Arm
REAR SUSPENSION SPECIFICATION:
Rear upper suspension arm

Rear Lower Suspension Arm
Specifications:
Double wish bone Rear
upper arm length 12inches
Lower arm length 13.5inches
Roll center height 5.5inches
Motion ratio(suspension travel/wheel travel)
.7
Suspension frequency 1.265hz
Total wheel travel 4.5inches
Shocker travel 3.1inches
Spring constant(k) 26N/mm
Caster -
Camber -
King pin 10degree
Scrub radius -
Toe -
Calculations:
1. Spring rate calculation
Motion Ratio= (d1/d2) 1 d1- Distance from spring centre line to control arm inner pivot center (in) or (mm) d2- Distance from outer ball joint to control arm inner pivot center (in) or (mm) SF = (187.8) √ (WR/sprung weight) 2 SF- Suspension Frequency (cpm)* WR- Wheel Rate (lbs/in) or (N/mm)
Sprung Weight- Vehicle corner weight less unsprung weight *cpm= cycles per minute Suspension frequency in hertz= SF/60
WR = (MR)2 (C) (ACF) 3 WR- Wheel Rate (lbs/in) or (N/mm) C- Spring Rate (lbs/in) or (N/mm) MR- Motion Ratio ACF- Angle Correction Factor
Front Motion Ratio=0.6, Angle of inclination=10˚, Spring Rate=18 Wheel rate = (.6) 2 (18) (Cos 10˚) = 6.38 N/mm Suspension frequency = 187.8√ (6.38/52) = 65.78 cpm = 1.1 hz
Rear Motion Ratio=0.7, Angle of inclination=40˚, Spring Rate=26 Wheel rate = (0.7)2 (26) (Cos 40˚) = 12.75 N/mm Suspension frequency = 187.8√ (12.75/78) = 75.9 cpm = 1.265 hz Suspension Arms’ FEAs:

Mountings:
Piaggio Three-Wheeler Rubber Mountings.
Coupler:
A customized coupler to link the output shaft of Briggs and
Stratton engine provided by BAJA SAE INDIA.
Specification of Gearbox:
It is a M&M champion gearbox:
1. Four forward gears and a reverse gear with a gear
lever having wired linkage.
2. The differential and gearbox are housed in a single
housing and universal joint have been provided
inside the differential itself.
3. A sequential transmission is used instead of
manual transmission which uses ‘H’ pattern.
Axles and C.V. Joints and Output Shaft Angularities:
Machined axles of Piaggio Three Wheeler, Maruti 800 C.v.
Joints
Shaft angularities:25 degree.
Fuel Tank:
Inbuilt fuel tank of capacity 3.8 litres.
Transmission:
We have decided to use rear wheel drive with rear engine,
the maximum speed of the vehicle is 60 km/hr as it is the
maximum allowable speed of the vehicle as per the BAJA
SAE rulebook.
We are using the gear box in normal orientation.
To find the speed of the vehicle corresponding to different
gear ratios, the formulae used is :
Velocity on road = 2π×N×R×60
1000xG
Some of our calculations for normal orientation are
tabulated in the table below:
Hence for maximum speed of 60 km/hr, we selected tires of 25 inch outer diameter as rear wheels. Further, our estimations show that when rpm varies from 2140 to 2900, the torque produced by engine is nearly constant and is around 18N-m. Maximum torque produced by the engine is 18.6N-m at 2520 rpm.
POWERTRAIN DESIGN

Normal orientation :
Gear Number Final Gear Ratios
Speed (km/hr)
Max. Speed (km/hr)
D=25 inch
First 31.45:1 0.65D 14
Second 18.70:1 1.109D 23
Third 11.40:1 1.82D 38
Fourth 7.35:1 2.82D 59
Reverse 55.08:1 0.38D 05
Exhaust:
Maximum emission: 19.38 ACFM
Calculation:
Maximum emission = (Vs * max. rpm of engine)/2
= 305 * 3600/2
= 549000 cc/min
= 19.38 ft3/min or ACFM
Where, Vs = Swept volume
Type of muffler used: Reactive or reflective type muffler
with reverse flow, Continuous silencer
Due to low frequency, reactive type muffler is used.
We are using aluminium sheets on sides, on RRH, on floor
and to cover the essential parts. On sides we are using two layers of aluminium sheets between those we will be doing wiring of brakes and clutch separately.
5 harness seat belt will be provided to driver which will prevent our experienced driver from any kind of jerk along with this a fire proof suit, a helmet is included in its dress. A fire extinguisher will be there on the vehicle considering safety in case of any hazard.
Roll cage – Tubes- 1018 Mild Steel Strips for mountings- Mild steel Body panel- Aluminium sheets
Brake system-
2 Brackets - Cast iron 2 spacer- Cast iron 2 brake pedals- Cast iron 2 master cylinder- Hard steel 2 Reservoir Bottle- Plastic Brake pipes- ` Aluminium 4 Callipers- Hard steel 4 Disc Rotors- Hard steel
Suspension Bushes- Nylon 40 Tabs- Cast iron Suspension arms- 1018 Mild Steel Pipes Knuckle Modification attachment- Cast Iron Shocker- Alloy steel Wheel assembly Tyres- Reinforced Nylon 4 Hubs- CI 4 Knuckles- CI 4 Bearings- Hard Steel 4 Knuckle Pin- Cast Iron Steering 2 Tie Rods- Mild Steel 3U-Joints- Cast Iron Steering Column- Mild Steel Adjustable steering attachment- Mild Steel Steering Wheel- Polymer Power Train Coupler- Hard Steel Axles- Hardened Steel Gear Lever- Cast Iron Differential and Gear Box- Mild Steel Gears- Mild Steel Accelerator Pedal- Aluminium Clutch Pedal- Cast Iron Drip Pan- Tin Drain Pipe- Rubber Bumper Pipes- 1018 Mild Steel 8 Tabs- Mild Steel 2 Shockers- Alloyed Steel Misc Seat- Rexene and Rubber Vehicle Top Tetrahedron- Aluminium Sheets Seat Belt- Fire resistant polymer
BODY PANEL AND SAFETY
EQUIPMENTS:
ENGINEERING BILLS OF MATERIALS:

The designing of this kind of vehicle is not a one man task and our team is the best of example of show team work. I want to thank my team for helping me during difficult times and suggesting me the best ways. I would also like to express my gratitude towards our Mechanical Engg Department and my college for supporting us and believing in us. I would also like to thank BAJA for providing us such an excellent opportunity for learning and enhancing our skills and showcasing a real life project. Due to this project we have started appreciating mechanical engineering and its wide area. Now we can proudly say “yes, we are the automobile engineers” and this is all due to BAJA, my college and my team(the best team I ever worked with). Advanced Vehicle Technology – HEINZ HEISLER Race Car Vehicle Dynamics – MILLIKEN AND MILLIKEN Fundamentals of Vehicle Dynamics –THOMAS D. GILLESPIE Vehicle Dynamics – REZA N. JAZAR A Field Guide to Automotive Technology – ED SOBEY. Design of Machine elements – V.B.BHANDARI. SUSPENSION DYNAMICS – Wm. C. Mitchell Design of Machines – S.S. RATAN Automobile Engineering – R.B. GUPTA www.wikipedia.com www.google.com
ACKNOWLEDGEMENT
REFERENCES