-
MK68901
December1988
MULTIFUNCTION PERIPHERAL
. 8 INPUT/OUTPUT PINS Individually programmable direction
Individual interrupt source capability
-
Programmable edge selection. 16 SOURCE INTERRUPT CONTROLLER
8 Internal sources 8 External sources Individual source enable
Individual source masking Programmable interrupt service modes
-
Polling-
Vector generation-
Optional In-service status Daisy chaining capability
. FOUR TIMERS WITH INDIVIDUALLY PRO-GRAMMABLE PRESCALING Two
multimode timers
-
Delay mode-
Pulse width measurement mode-
Event counter mode Two delay mode timers Independent clock input
Time out output option
. SINGLE CHANNEL USART Full Duplex Asynchronous to 65 kbps Byte
synchronous to 1 Mbps Internal/External baud rate generation DMA
handshake signals Modem control Loop back mode
. 68000 BUS COMPATIBLE
. 48 PIN DIP OR 52 PIN PLCC
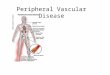
Figure 1 : Pin connections.
DESCRIPTIONThe MK68901 MFP (Multi-Function Peripheral) is
acombination of many of the necessary peripheralfunctions in a
microprocessor system.Included are :
Eight parallel I/O linesInterrrupt controller for 16 sourcesFour
timersSingle channel full duplex USART
The use of the MFP in a system can significantly re-duce chip
count, thereby reducing system cost. TheMFP is completely 68000 bus
compatible, and 24 di-rectly addressable internal registers provide
the ne-
MFP
1
DPIP48 PLCC52
1/33
-
necessary control and status interface to the pro-grammer.The
MFP is a derivative of the MK3801 STI, a Z80family peripheral.
PIN DESCRIPTIONGND : GroundVCC : +5 volts ( 5%)CS : Chip Select
(input, active, low). CS is u-
sed to select the MK68901 MFP for ac-cesses to the internal
registers. CS andIACK must not be asserted at the sametime.
DS : Data Strobe (input, active low). DS is u-sed aspart of
thechip select and interruptacknowledge functions.
R/W : Read/Write (input). R/W is the signalfrom the bus master
indicating whetherthe current bus cycle is a Read (High) orWrite
(Low) cycle.
DTACK : Data Transfer Acknowledge. (output, ac-tive low,
tri-stateable) DTACK is used tosignal the bus master that data is
ready,or that data has been accepted by theMK68901 MFP.
A1-A5 : Address Bus (inputs). The adress bus isused to adress
one of the internal regis-ters during a read or write cycle.
D0-D7 : Data Bus (bi-directional, tri-stateable).The data bus is
used to receive data fromor transmit data to one of the internal
re-gisters during a read or write cycle. It isalso used to pass a
vector during an in-terrupt acknowledge cycle.
CLK : Clock (input). This input is used to pro-vide the internal
timing for the MK68901MFP.
RESET : Device reset. (input, active low). Resetdisables the
USART receiver and trans-mitter, stops all timers and forces the
ti-mer outputs low, disables all interruptchannels and clears any
pending inter-rupts. The General Purpose Interrupt/I/Olines will be
placed in the tri-state inputmode. All internal registers (except
the ti-mer, USART data registers, and transmitstatus register) will
be cleared.
INTR : Interrupt Request (output, active low, o-pen drain). INTR
is asserted when theMK68901 MFP is requesting an interrupt.INTR is
negated during an interrupt ac-
knowledge cycle or by clearing the pen-ding interrupt(s) through
software.
IACK : Interrupt Acknowledge (input, activelow). IACK is used
tosignal the MK68901MFP that the CPU is acknowledging aninterrupt.
CS and IACk must not be as-serted at the same time.
IEI : Interrupt Enable In (input, active low). IEIis used to
signal the MK68901 MFP thatno higher priority device is requesting
in-terrupt service.
IEO : Interrupt Enable Out (output, active low).IEO is used to
signal lower priority peri-pherals that neither the MK68901 MFPnor
another higher priority peripheral isrequesting interrupt
service.
10-17 : General Purpose Interrupt I/O lines.These lines may be
used as interrupt in-puts and/or I/O lines. When used as in-terrupt
inputs, their active edge is pro-grammable. A data direction
register is u-sed to define which lines are to be Hi-Zinputs and
which lines are to be push-pullTTL compatible outputs.
SO : Serial Output. This is the output of the U-SART
transmitter.
SI : Serial Input. This is the input to the U-SART receiver.
RC : Receiver Clock. This input controls theserial bit rate of
the USART receiver.
TC : Transmitter Clock. This input controls theserial bit rate
of the USART transmitter.
RR : Receiver Ready. (output, active low)DMA output for
receiver, which reflectsthe status of Buffer Full in port
number15.
TR : Transmitter Ready. (output, active low)DMA output for
transmitter, which re-flects the status of Buffer Empty in
portnumber 16.
TAO,TBO,TCO,TDO:
Timer Outputs. Each of the four timershas an output which can
produce asquare wave. The output will changestates each timer cycle
; thus one full pe-riod of the timer out signal is equal to
twotimer cycles. TAO or TBO can be reset(logic O) by a write to
TACR, or TBCRrespectively.
XTAL1,XTAL2 :
Timer Clock inputs. A crystal can beconnected between XTAL1 and
XTAL2,or XTAL1 can be driven with a TTL levelclock. When driving
XTAL1 with a TTL le-
MK68901
2/33
-
vel clock, XTAL2 must be allowed to float.Whenusing a crystal,
external capacitorsare required. See figure 33. All chip ac-cesses
are independent of the timerclock.
TAI,TBI : Timer A, B inputs. Used whenrunning the
timers in the event count or the pulsewidth measurement mode.
The interruptchannels associated with 14 and 13 areused for TAI and
TBI, respectively. Thus,when running a timer in the pulse width
V000351
MK68901
3/33
-
Figure 4 : Register Map.
Address Port N. Abbreviation Register Name012
GPIPAERDDR
GENERAL PURPOSE I/OACTIVE EDGE REGISTERDATA DIRECTION
REGISTER
3456789AB
IERAIERBIPRAIPRBISRAISRBIMRAIMRB
VR
INTERRUPT ENABLE REGISTER AINTERRUPT ENABLE REGISTER BINTERRUPT
PENDING REGISTER AINTERRUPT PENDING REGISTER BINTERRUPT IN-SERVICE
REGISTER AINTERRUPT IN-SERVICE REGISTER BINTERRUPT MASK REGISTER
AINTERRUPT MASK REGISTER BVECTOR REGISTER
CDEF101112
TACRTBCR
TCDCRTADRTBDRTCDRTDDR
TIMER A CONTROL REGISTERTIMER B CONTROL REGISTERTIMERS C AND D
CONTROL REGISTERTIMER A DATA REGISTERTIMER B DATA REGISTERTIMER C
DATA REGISTERTIMER D DATA REGISTER
1314151617
SCRUCRRSRTSRUDR
SYNC CHARACTER REGISTERUSART CONTROL REGISTERRECEIVER STATUS
REGISTERTRANSMITTER STATUS REGISTERUSART DATA REGISTER
INTERRUPTSThe General Purpose I/O-Interrupt Port (GPIP)
pro-vides eight I/O lines that may be operated either asinputs or
outputs under software control. In addition,each line may generate
an interrupt in either a po-sitive going edge or a negative going
edge of the in-put signal.The GPIP has three associated registers.
One al-lows the programmer to specify the Active Edge foreach bit
that will trigger an interrupt. Another registerspecifies the Data
Direction (input or output) asso-ciated with each bit. The third
register is the actualdata I/O register used to input or output
data to theport. These three registers are illstrated in figure
5.The Active Edge Register (AER) allows each of theGeneral Purpose
Interrupts to provide an interrupton either a 1-0 transition or a
0-1 transition. Writinga zero to the appropriate bit of the AER
causes theassociated input to produce an interrupt on the
1-0transition. The edge bit is simply one input to an ex-clusive-or
gate, with the other input coming from theinput buffer ant the
output going to a 1-0 transitiondetector. Thus, depending upon the
state of the in-put, writing the AER can cause an
interrupt-produ-cing transition, which will cause an interrupt on
theassociated channel, if that channel is enabled. One
would then normally configure the AER beforeenabling interrupts
via IERA and IERB.Note : Changing the edge bit, with the
interruptenabled, may cause an interrupt on that channel.The Data
Direction Register (DDR) is used todefine10-17 as inputs or as
outputs on a bit by bit basis.Writing a zero into a bit of the DDR
causes the cor-responding Interrupt-I/O pin to be a Hi-Z input.
Wri-ting a one into a bit of the DDR causes the cor-responding pin
to be configured as a push-pull out-put. When data is written into
the GPIP, those pinsdefined as inputs will remain in the Hi-Z state
whilethose pins defined as outputs will assume the state(high or
low) of their corresponding bit in the GPIP.When the GPIP is read,
the data read will come di-rectly from the corresponding bit of the
GPIPregisterfor all pins defined as output, while the data read
onall pins defined as inputs will come from the inputbuffers.Each
individual function in the MK68901 is providedwitha unique
interrupt vector that is presented to thesystemduring the interrupt
acknowledge cycle. Theinterrupt vector returned during the
interrupt ac-knowledge cycle is shown in figure 6, while the
vec-tor register is shown in figure 7.
MK68901
4/33
-
There are 16 vector addresses generated internallyby the
MK68901, one for each of the 16 interruptchannels.The Interrupt
Control Registers (figure 8) providecontrol of interrupt processing
for all I/O facilities ofthe MK68901. These registers allow the
program-
mer to enable or disable any or all of the 16 inter-rupts,
providing masking for any interrupt, and pro-vide access to the
pending and in-service status ofthe interrupt. Optional
end-of-interrupt modes areavailable under software control. All the
interruptsare prioritized as shown in figure 9.
Figure 5 : General Purpose I/O Registers.
Figure 6 : Interrupt Vector.
V000352
V000353
MK68901
5/33
-
Figure 7 : Vector Register.
Figure 8 : Interrupt Control Registers.
V000354
V000355
MK68901
6/33
-
Figure 9 : Interrupt Control Register DefinitionsPriority
Channel Description
HIGHEST
LOWEST
1111111011011100101110101001100001110110010101000011001000010000
General Purpose Interrupt 7(I7)General Purpose Interrupt
6(I6)Timer AReceive Buffer FullReceive ErrorTransmit Buffer
EmptyTransmit ErrorTimer BGeneral Purpose Interrupt 5(I5)General
Purpose Interrupt 4(I4)Timer CTimer DGeneral Purpose Interrupt
3(I3)General Purpose Interrupt 2(I2)General Purpose Interrupt
1(I1)General Purpose Interrupt 0(I0)
Interrupts may be either polled or vectored. Eachchannel may be
individual enabled or disabled bywriting a one or a zero in the
appropriate bit of Inter-rupt Enable Registers (IERA, IERB - see
figure 8 forall registers in this section). When disabled, an
in-terrupt channel is completely inactive. Any internalor external
action which would normally produce aninterrupt on thatchannel is
ignored and any pendinginterrupt on that channel will be cleared by
disablingthat channel. Disabling an interrupt channel has noeffect
on the corresponding bit in Interrupt In-Ser-vice Registers (ISRA,
ISRB) ; thus, if the In-serviceRegisters are used and an interrupt
is in service onthat channel when the channel is disabled, it will
re-main in service until cleared in the normal manner.IERA and IERB
are also readable.When an interrupt is received on an enabled
chan-nel, its corresponding bit in the pending register willbe set.
When that channel is acknowledged it willpass its vector, and the
corresponding bit in the In-terrupt Pending Register (IPRA or IRPB)
will becleared. IPRA and IPRB are readable ; thus by pol-ling IPRA
and IPRB, it can be determined whethera channel has a pending
interrupt. IPRA and IPRBare also writeable and a pending interrupt
can becleared without going through the acknowledge se-quence by
writing a zero to the appropriate bit. Thisallows any one bit to be
cleared, without altering anyother bits, simply by writing all ones
except for thebit position to be cleared to IPRA or IPRB. Thus
afully polled interrupt scheme is possible. Note : wri-ting a one
to IPRA, IPRB has no effect on the inter-rupt pending register.
The interrupt mask registers (IMRA and IMRB) maybe used to block
a channel from making an interruptrequest. Writing a zero into the
corresponding bit ofthe mask register will still allow the channel
to re-ceive an interrupt and latch it into its pending bit (ifthat
channel is enabled), but will prevent that chan-nel from making an
interrupt request. If that channelis causing an interrupt request
at the time the cor-responding bit in the mask register is cleared,
the re-quest will cease. If no other channel is making a re-quest,
INTR will go inactive. If the mask bit is re-en-abled, any pending
interrupt is now free to resumeits request unless blocked by a
higher priority re-quest for service. IMRAand IMRB are also
readable. A conceptual circuit of an interrupt channel isshown in
figure 10.
MK68901
7/33
-
Figure 10 : A Conceptual Circuit of an Interrupt Channel.
There are two end-of-interrupt modes : the automat-ic
end-of-interrupt mode and thesoftware end-of-in-terrupt mode. The
mode is selected by writing a oneor a zero to the S bit of the
Vector Register (VR). Ifthe S bit of the VR is a one, all channels
operate inthe software end-of-interrupt mode. If the S bit is
azero, all channels operate in the automatic end-of-interrupt mode,
and a reset is held on all in-servicebits. In the automatic
end-of-interrupt mode, thepending bit is cleared when that channel
passes itsvector. At that point, no further history of that
inter-rupt remains in the MK68901 MFP. In the
softwareend-of-interrupt mode, the in-service bit is set andthe
pending bit is cleared when the channel passesits vector. With the
in-service bit set, no lower prioritychannel is allowed to request
an interrupt or to passits vector during an acknowledge sequence ;
how-ever, a lower priority channel may still receive an in-terrupt
and latch it into the pending bit. A higher prio-rity channel may
still request an interrupt and be ac-
knowledged. The in-service bit of a particular chan-nel may be
cleared by writing a zero to the corre-sponding bit in ISRA or
ISRB. Typically, this will bedone at the conclusion of the
interrupt routine justbefore the return. Thus no lower priority
channel willbe allowed to request service until the higher
prioritychannel is complete, while channels of still higherpriority
will be allowed to request service. While thein-service bit is set,
a second interrupt on that chan-nel maybe received and latched into
the pendingbit,though no service request will be made in re-sponse
to the second interrupt until the in-service bitis cleared. ISRA
and ISRB may be read at any time.Only a zero may be written into
any bit of ISRA andISRB ; thus the in-service bits maybe cleared
insoft-ware but cannot be set in software. This allows anyone bit
to be cleared, without altering any other bits,simply by writing
all ones except for the bit positionto be cleared to ISRA or ISRB,
as with IPRA andIPRB.
Figure 11 a : A Conceptual Circuit of the MK68901 MFP Daisy
Chaining.
V000356
V000357
MK68901
8/33
-
Figure 11 b : Daisy Chaining.
Each interrupt channel responds with a discrete 8-bit vector
when acknowledged. The upper four bitsof the vector are set by
writing the upper four bits ofthe VR. The four low order bits (bit
3-bit 0) are ge-nerated by the interrupting channel.To acknowledge
an interrupt, IACK goes low, the IEIinput must go low (or be tied
low) and the MK68901MFP must have an acknowledgeable interrupt
pen-ding. The Daisy Chaining capability (figure 11) re-quires that
all parts in a chainhave acommon IACK.When the common IACK goes
low, all parts freezeand prioritize interrupts in parallel. Then
priority ispassed down the chain, via IEI and IEO, until a
partwhich has a pending interrupt is reached. The partwith the
pending interrupt, passes a vector,does notpropagate IEO, and
generates DTACK.Figure 9 describes the 16 prioritized interrupt
chan-nels. As chown, General Purpose Interrupt 7 has thehighest
priority, while General Purpose Interrupt 0 isassigned the lowest
priority. Each of these channelsmay be reprioritized, in effect, by
selectively ma-sking interrupts under software control. The
binarynumbers under channel correspond to the modi-fied bits IV3,
IV2, IV1 and IV0, respectively, of theInterrupt Vector for each
channel (see figure 6).Each channel has an enable bit contained in
IERAor IERB, a pending latch contained in IPRA or IPRB,a mask bit
contained in IMRA or IMRB, and an inservice latch contained in ISRA
or ISRB. Additional-ly, the eight General Purpose Interrupts each
havean edge bit contained in the Active Edge Register(AER), a bit
to define the line as input or outputcontained in the Data
Direction Register (DDR) and
an I/O bit in the General Purpose Interrupt-I/O Port(GPIP).
TIMERSThere are four timers on the MK68901 MFP. Two ofthe timers
(Timer A and Timer B) are full function ti-mers which can perform
the basic delay functionand can also perform event counting, pulse
widthmeasurement, and waveform generation. The othertwo timers
(Timer C and Timer D) are delay timersonly. One or both of these
timers canbe used to sup-ply the baud rate clocks for the USART.
All timersare prescaler/counter timers with a common inde-pendent
clock input (XTAL1, XTAL2). In addition, alltimers have a time-out
output, function that toggleseach time the timer times out.The four
timers are programmed via three TimerControl Registers and four
Timer DataRegisters. Ti-mers A and B are controlled by the control
registersTACR and TBCR, respectively (see figure 12), andby the
data registers TADR and TBDR (figure 13).Timers C and D are
controlled by the control registerTCDCR (see figure 14) and two
data registersTCDR and TDDR. Bits in the control registers allowthe
selection of operational mode, prescale, andcontrol white the data
registers are used to read thetimer or write into the time constant
register. TimerA and B input pins TAI and TBI, are used for the
e-vent and pulse width modes for timers A and B.With the timer
stopped, no counting can occur. Thetimer contents will remain
unaltered while the timeris stopped (unless reloaded by writing the
Timer Da-ta Register), but any residual count in the prescalerwill
be lost.
V000358
MK68901
9/33
-
In the delay mode, the prescaler is always active.A count pulse
will be applied to the main timer uniteach time the prescribed
number of timer clock cy-cles has elapsed. Thus, if the prescaler
is program-med to divide by ten, a count pulse will be appliedto
the main counter every ten cycles of the timerclock.Each time
acount pulse is applied to the main coun-ter, it will decrement its
contents. The main counteris initially loaded by writing to the
Timer Data Regis-ter. Each count pulse will cause the current count
todecrement. When the timer has decremented downto 01 , the next
count pulse will not cause it to de-crement to 00. Instead, the
next count pulse willcause the timer to be reloaded from the Timer
DataRegister.Additionally, a Time out pulse will be pro-duced. This
Time Out pulse is coupled to the timerinterrupt channel, and, if
that channel is enabled, aninterrupt will be produced. The Time Out
pulse is al-so coupled to the timer output pin and will cause
thepin to change states. The output will remain in thisnew
stateuntil the next Time Out pulse occurs. Thusthe output will
complete one full cycle for each twoTime Out pulses.If, for
example, the prescaler were programmed todivide by ten, and the
Timer Data Register were loa-
ded with 100 (decimal), the main counter would de-crement once
for every ten cycles of the timer clock.A Time Out pulse will occur
(hence aninterrupt if thatchannel is enabled) every 1000 cycles of
the timerclock, and the timer output will complete one full cy-cle
every 2000 cycles of the timer clock.The main counter is an 8-bit
binary down counter. Itmay be read at any time by reading the Timer
DataRegister. The information read is the informationlast clocked
into the timer read register when the DSpin had last gone high
prior to thecurrent read cycle.When written,data is loaded into the
Timer Data Re-gister, and the main counter, if the timer is
stopped.If the Timer Data Register is written while the timeris
running, the new word is not loaded into the timeruntil it counts
through H01. However, if the timeris written while it is counting
through H01, an inde-terminate value will be written into the timer
constantregister. This may be circumvented by ensuring thatthe data
register is not written when the count isH01.If the main counter is
loaded with 01, a Time OutPulse will occur every time the prescaler
presentsa count pulse to the main counter. If loaded with00, a Time
Out pulse will occur every 256 countpulses.
Figure 12 : Timer A and B Control Registers.
* Unused bits : read as zeros.
V000359
MK68901
10/33
-
Figure 13 : Timer Data Registers (A, B, C, and D).
Figure 14 : Timer C and D Register.
* Unused bi ts : read as zeros.
V000360
V000361
MK68901
11/33
-
Figure 15 : A Conceptual Circuit of the MFP Timers in the Pulse
Width Measurement Mode.
Changing the prescale value with the timer runningcan cause the
first Time Out pulse to occur at an in-determinate time, (no less
than one nor more than200 timer clock cycles times the number in
the timeconstant register), but subsequent Time Out pulseswill then
occur at the correct interval.In addition to the delay mode
described above, Ti-mers A and B can also function in the Pulse
WidthMeasurement mode or in the Event Count mode. Ineither of these
two modes, an auxiliary control signalis required. The auxiliary
control input for Timer A isTAI, and for Timer B,TBI is used. The
interrupt chan-nels associated with 14 and 13 are used for
TAIandTBI, respectively, in Pulse Width mode. See Figure15.The
pulse width measurement mode functionsmuch like the delay mode.
However, in this mode,the auxiliary control signal on TAI or TBI
acts as anenable to the timer. When the control signal on TAIor TBI
is inactive, the timer will be stopped. When itis active, the
prescaler andmain counter are allowedto run. Thus the width of the
active pulse on TAI orTBI is determined by the number of timer
countswhich occur while the pulse allows the timer to run.The
active state of the signal on TAI or TBI is de-pendent upon the
associated Interrupt Channelsedge bit (GPIP 4 for TAI and GPIP 3
for TBI : seeActive Edge Register in figure 5). If the edge bit
as-
sociated with the TAI or TBI input is a one, it will beactive
high ; thus the timer will be allowed to runwhen the input is at a
high level. If the edge bit is azero, the TAI or TBI input will be
active low. As pre-viously stated, the interrupt channel (13 or 14)
as-sociated with the input still functions when the timeris used in
the pulse width measurement mode. How-ever, if the timer is
programmed for the pulse widthmeasurement mode, the interrupt
caused by tran-si-tions on the associated TAI or TBI input will
occur onthe opposite transition.For example, if the edge bit
associated with the TAIinput (AER-GPIP 4) is as one, an interrupt
wouldnormally be generated on the 0-1 transition of the 14input
signal. If the timer associated with this input(Timer A) is placed
in the pulse width measurementmode, the interrupt will occur on the
1-0 tran-sitionof the TAI signal instead. Because the edge
bit(AER-GPIP 4) is a one, Timer A will be allowed tocount while the
input is high. When the TAI inputmakes the high to low transition,
Timer A will stop,and it is at this point that the interrupt will
occur (as-suming that the channel is enabled). This allows
theinterrupt to signal the CPU that the pulse being mea-sured has
terminated ; thus Timer A may now beread to determine the pulse
width. (Again note that13 and 14 may still be used for I/O when the
timeris in the pulse width measurement mode). If Timer
V000332
MK68901
12/33
-
A is reprogrammed for another mode, interrupts willagain occur
on the transition, as normally defined bythe edge bit. Note that,
like changing the edge bit,placing the timer into or taking it out
of the pulsewidth mode can produce a transition on the signalto the
interrupt channel and may cause an interrupt.If measuring
consecutive pulses, it is obvious thatone must read the contents of
the timer and then rei-nitialize the main counter by writing to the
timer dataregister. If the timer data register is written while
thepulse is going to the active state, the write operationmay
result in an indeterminate value being writteninto the main
counter. If the timer is written after thepulse goes active, the
timer counts from the pre-vious contents, and when it counts
through H01,the correct value is written into the timer. The
pulsewidth then includes counts from before the timerwas
reloaded.In the event count mode, the prescaler is disabled.Each
time the control input on TAI or TBi makes anactive transition as
defined by the associated Inter-rupt Channels edge bit, a count
pulse will be gene-rated, and the main counter will decrement. In
all o-ther respects, the timer functions as previously des-cribed.
Altering the edge bit while the timer is in theevent count mode can
produce a count pulse. Theinterrupt channel associated with the
input (I3 for I4for TAI) is allowed to function normally. To
counttransitions reliably, the input must remain in eachstate (1/O)
for a length of time equal to four periodsof the timer clock ; thus
signals of a frequency up toone fourth of the timer clock can be
counted.The manner in which the timer output pins togglestates has
previously been described. All timer out-puts will be forced low by
a device RESET. The out-put associated with Timers A and B will
toggle oneach Time Out pulse regardless of the mode the ti-mers are
programmed to. In addition, the outputsfrom Timers A and B can be
forced low at any timeby writing a 1 to the reset location in TACR
and
TBCR, respectively. The output will be forced to thelow state
during the WRITE operation, and at theconclusion of the operation,
the output will again befree to toggle each time a Time Out pulse
occurs.This feature will allow waveform generation.During reset,
the Timer Data Registers and the maincounters are not reset. Also,
if using the reset optionon Timers A or B, one must make sure to
keep theother bits in the correct state so as not to affect
theoperation of Timers A and B.
USARTSerial Communication is provided by a
full-duplexdouble-buffered USART, which is capable of
eitherasynchronous or synchronous operation. Variableword length
and start/stop bit configurations areavailable under software
control for asynchronousoperation. For synchronous operation, a
Sync Wordis provided to establish synchronization during re-ceive
operations. The Sync Word will also be repea-tedly transmitted when
no other data is available fortransmission. Moreover, the MK68901
allows strip-ping of all Sync Words received in synchronous
o-peration. The handshake control lines RR (ReceiverReady) and TR
(Transmitter Ready) allow DMA o-peration. Separate receive and
transmit clocks areavailable, and separate receive and transmit
statusand data bytes allow independent operation of thetransmit and
receive sections.The USART is provided with three
Control/StatusRegisters and a Data Register. The USART DataRegister
form is illustrated in figure 16. The pro-grammer may specify
operational parameters fortheUSART via the Control Register, as
shown in fig-ure 17. Status of both the Receiver and
Transmittersections is accessed by means of the twoStatus
Re-gisters, as shown in figures 18 and 19. Data writtento the Data
Register is passed to the transmitter,while reading the Data
Register will access data re-ceived by the USART.
Figure 16 : USART Data Register.
V000362
MK68901
13/33
-
16/ 1 : When this bit is zero, data will be clockedinto and out
of the receiver and transmit-ter at the frequency of their
respectiveclocks. When this bit is loaded with aone,data will be
clocked into and out of the re-ceiver and transmitter at one
sixteenththe frequency of their respective clocks.Additionally,
when placed in the divide bysixteenmode, the receiver data
transitionresynchronization logic will be enabled.
WL0-WL1 :Word Length Control. These two bits setthe length of
the data word (exclusive ofstart bits, stop bits, and parity bits
as fol-lows:
ST0-ST1 : Start/stop bit control (format control).These two bits
set the format as follows
:
PARITY : Parity Enabled. When set (1), parity willbe checked by
the receiver, parity will becalculated, and a parity bit will be
insertedby the transmitter. When cleared (0) noparity check will be
made and no parity bitwill be inserted for transmission.
For a word length of 8 the MFP calculatesthe parity and appends
it when transmit-ting a sync character. For shorterlengths, the
parity must be stored in theSync Character Register (SCR) alongwith
the sync character.
E/O : Even-Odd. When set (1), even paritywill be used if parity
is enabled. Whencleared (0), odd parity will be used if pa-rity is
enabled.
Note that the synchronous or asynchronous formatmaybe selected
independently of a 1or 16clock.Thus it is possible to clock data
synchronously intothe device but still use start and stop bits. In
thismode, all normal asynchronous format features stillapply. Data
will be shifted in after a start bit is en-countered, and a stop
bit will be checked to deter-mine proper framing. If a transmit
underrun condi-tion occurs, the output will be placed in a
markingstate, etc. It is conversely possible to clock data
inasynchronously using a synchronous format. Thereis data
transition detection logic built into the receiveclock circuitry
which will re-synchronize the internalshift clock on each data
transition so that, with suf-ficienty frequent data transitions,
startbitsare not re-quired. In this mode, all other common
synchronousfeatures function normally. This re-synchronizationlogic
is only active in 16 clock mode.
RECEIVERThe receiver section of the USART is configured bythe
UCR as previously described. The status of thereceiver can be
determined by reading and writingto the Receiver Status Register
(RSR). The RSR isconfigured as follows :
Figure 17 : USART Control Register (UCR).
WL1 WL0 Word Length0011
0101
8 Bits7 Bits6 Bits5 Bits
ST1 ST0 Start Bits StopBits Format00
11
0101
0111
01
11/22
SYNCASYNCASYNCASYNC
V000363
MK68901
14/33
-
Figure 18 : Receiver Status Register (RSR).
BF : Buffer Full. This bit is set when the inco-ming word is
transferred to the receivebuffer. The bit is cleared when the
re-ceive buffer is read by reading the UDR.This bit of the RSR is
read only.
OE : Overrun Error. This flag is set if the inco-ming word is
completely received anddue tobe tranferred to the receive
buf-fer,but the last word in the receive buf-ferhasnot yet been
read. When this conditionoccurs, the word in the receive buffer
isnot overwritten by the new word. Notethat the status flags always
reflect thestatus of the data word currently in there-ceive buffer.
As such, the OE flag is notactually set until the good word
currentlyin the buffer has been read. The interruptassociated with
this error will also not begenerated unti the old word in the
receivebuffer has been read.OE flag is cleared by reading the
receiverstatus register, and new data words can-not be shifted to
the receive buffer untilthis is done.
PE : Parity Error. This flag is set if the word re-ceived has a
parity error. The flag is setwhen the received word is
tranferredfrom the shift register to the receive buf-fer if the
error condition exists. The flag iscleared when the next word which
doesnot have a parity error is tranferred to thereceive buffer.
FE : Frame Error. This flag only applies to theasynchronous
format. A frame error isdefined as a non-zero data word which isnot
followed by a stop bit. Like the PEflag, the FE flag is set or
cleared when aword is transferred to the receive buffer.
F/S : Found/Search. This combination controlbit and flag bit is
only used with the syn-chronous format. It can be set or
clearedbywriting to this bit of the RSR.Whenthisbit is cleared, the
receiver is placed in thesearch mode. In this mode, a bit by
bitcomparison of the incoming data to the
character in the Sync Character Register(SCR) is made. The word
length counteris disabled. When a match is found, thisbit will be
set automatically, and the wordlength counter will start as sync
has notbeen achieved. An interrupt will be gene-rated on the
receive error channel whenthe match occurs. The word just shiftedin
will, or necessity, be equal to the synccharacter, and it will not
be transferred tothe receive buffer.
B : Break. This flag is used only when the a-synchronous format
is selected. This flagwill be setwhen an all zero data word,
fol-lowed by no stop bit, is received. The flagwill stay set until
both a non-zero bit is re-ceived and the RSR has been read atleast
once since the flag was set. Breakindication will not occur if
thereceive buff-er is full.
M/CIP : Match/Character in Progress. If the syn-chronous format
is selected, this flag isthe Match flag. It will be set each time
theword transferred to the receive buffermatches the sync
character. It will be re-set each time the word transferred to
thereceive buffer does not match the synccharacter. If the
asynchronous format isselected, this flag represents Characterin
Progress. It will be set upon a start bitdetect and cleared at the
end of the word.
SS : Sync Strip Enable. If this bit is set to aone, data words
that match the synccharacter will not be loaded into the re-ceive
buffer, and no buffer full signal willbe generated.
RE : Receiver Enable. This control bit is usedto enable or
disable the receiver. If a zerois written to this bit of the RSR,
the recei-ver will turn off immediately. All flags in-cluding the
F/S bit will be cleared. If a oneis written to this bit, normal
receiver ope-ration is enabled. The receive clock hasto be running
before the receiver is en-abled.
V000364
MK68901
15/33
-
There are two interrupt channels associated with thereceiver.
One channel is used for the normal BufferFull condition, while the
other channel is used whe-never an error condition occurs. Only one
interruptis generated per word received, but dedicating twochannels
allows separate vectors : one for the nor-mal condition, and one
for an error condition. If theerror channel is disabled, an
interrupt will be gen-e-rated via the Butter Full Channel, whether
the wordreceived is normal or in error. Those conditionswhich
produce an interrupt via the error channelare : Overrun, Parity
Error, Frame Error, SyncFound, and Break. If a received word has an
errorassociated with it, and the error interrupt channel isenabled,
an interrupt will occur on the error channelonly.Each time a word
is transferred into the receive buf-fer, a corresponding set of
flags is latched into theRSR. No flags (except CIP) are allowed to
changeuntil the data word has been read from the receivebuffer.
Reading the receive buffer allows a new dataword to be transferred
to the receive buffer when itis received. Thus one should first
read the RSR thenread the receive buffer (UDR) to ensure that
theflags just read match the data word just read. If donein the
reverse order, it is possible that subsequentto reading the data
word from the receive buffer, butprior to reading the RSR, a new
word may be recei-ved and transferred to the receive buffer and,
withit, its associated flags latched into the RSR. Thus,when the
RSR is read, those flags may actually cor-respond to a different
data word. It is good practice,also to read the RSR prior to a data
read as, whenan overrun error occurs, the receiver will not
assem-ble new characters until the RSR has been read.As previously
stated, when overrun occurs, the OEflag will not be set and the
associated interrupt willnot be generated until the receive buffer
has beenread. If a break occurs, and the receive buffer hasnot yet
been read, only the B flag will be set (OE will
not be set). Again, this flag will not be set until thelast
valid word has been read from the receive buf-fer. If the break
condition ends and another wholedata word is received before the
receive buffer isread, both the B and OE flags will be set once
thereceive buffer is read.If a break occurs while the OE flag is
set, the B flagwill also be set.A break generates an interrupt when
the conditionoccurs and again when the condition ends. If thebreak
condition ends before it is acknowledged byreading the RSR, the
receiver error interrupt indica-ting end of break will be generated
once the RSR isread.Anytime the asynchronous format is selected,
startbit detection is enabled. New data is not shifted intothe
shift register until a zero bit is detected. If a 16clock is
selected, along with the asynchronous for-mat, false start bit
detection is also enabled. Anytransition has to be stable for 3
positive going edgesof the receive clock to becalled a valid
transition. Fora start bit to be good, a valid 0-1 transition must
notoccur for 8 positive clock transitions after the initialvalid
1-0 transition.After a good start bit has been detected, valid
tran-sitions in the data are checked for continously.When a valid
transition is detected, the counter isforced tostate zero, andno
more transition checkingis started until state four. At stateeight,
the previousstate of the transition checking logic is clocked
intothe receiver.As a result of this resynchronization logic, it is
pos-sible to run with asynchronous clocks without startand stop
bits if there are sufficient valid transitionsin the data stream.
This logic also makes the unitmore tolerant of clock skew for
normal asynchro-nous communications than a device which employsonly
start bit synchronization.
Figure 19 : Transmitter Status Register (TSR).
V000365
MK68901
16/33
-
TRANSMITTERThe transmitter section of the USART is configuredas
to format, word length, etc. by the UCR, as pre-viously described.
The status of the transmitter canbe determined by reading or
writing the TransmitterStatus Register (TSR). The TRSis configured
as fol-lows :BE : Buffer Empty. This status bit is set when
the word in the transmit buffer is transfer-red to the output
shift register and thusthe transmit buffer may be reloaded withthe
next data word. The flag is clearedwhen the transmit buffer is
reloaded. Thetransmit buffer is loaded by writing to theUDR.
UE : This bit is set when the last word hasbeen shifted out of
the transmit shift re-gister before a new word has been loa-ded
into the transmit buffer. It is not ne-cessary toclear this bit
before loading theUDR.This bit may be cleared by either readingthe
TSR or by disabling the transmitter.After the setting of the UE
bit, one fulltransmitter clock cycle is required beforethis bit can
be cleared by a read. The ti-ming in some systems may allow a
readof the TSR before the required clock cy-cle has been completed.
This would re-sult in the UE bit not being cleared untilthe
following read. To avoid this problem,a dummy read of the TSR
should be per-formed at the end of he UE service rou-tine.Only one
underrun error may be genera-ted between loads of the UDR
regardlessof the number of transmitter clock cyclesbetween UDR
loads.
AT : Thisbit causes the receiver to beenabledat the end of the
transmission of the lastword in the transmitter if the
transmitterhas been disabled.
END : Endor Transmission. When the transmit-ter is turned off
with a character still in theoutput shift register, transmission
willcontinue until that character is shiftedout. Once it has
cleared the output regis-ter, the END bit will be set. If no
character
is being transmitted when the transmitteris disabled, the
transmitter will stop at thenext rising edge of the internal shift
clock,and END will immediately be set. TheEND bit is cleared by
re-enabling thetransmitter.
B : Break. This control bit will cause a breakto be transmitted.
Whena 1 is written tothe B bit of the TSR,a break will be
trans-mitted upon completion of the character(if any) currently
being transmitted. Abreak will continue to be transmitted untilthe
B bit is cleared by writing a 0 tot hisbit of the TSR. At that
time, normal trans-mission will resume. The B bit has nofunction in
the synchronous format. Set-ting the B bit to a one keeps the BE
bitfrom being set to a one. So, if there werea word in the buffer
at the start of break,it would remain there until the end ofbreak,
at which time it would be transmit-ted (if the transmitter is still
enabled). Ifthe buffer were not full at the start ofbreak, it could
be written at any time du-ring the break. If the buffer is empty at
theend of break, the underrun flag will be set(unless the
transmitter is disabled).The BREAK bit cannot be set until
thetransmitter has been enabled and thetransmitter has had
sufficient time (oneclock cycle) to perform the internal resetand
initialization functions.
H,L : High and Low. These two control bits areused to configure
the transmitter output,when the transmitter is disabled, as
fol-lows :H L Output State0 0 Hi-Z0 1 Low (0)1 0 High1 1
Loop-Connects transmitter output toreceiver input, and TC to
Receiver Clock(RC and SI are not used ; they are bypas-sed
internally). In loop back mode, trans-mitter output goes high when
disabled.
Altering these two bits after Transmitter
MK68901
17/33
-
Figure 20 : SYNC Character Register.
Enable (XE) is set will alter the outputstate untilEND is false.
These bits shouldbe set prior to enabling the transmitter.The state
of these bits determine thestate of the first transmitted character
af-ter the transmitter is enabled. If the highimpedance mode was
selected prior tothe transmitter being enabled, the first
bittransmitted is indeterminate.
XE : Transmitter Enable. This control bit is u-sed to enable or
disable the transmitter.When set, the transmitter is enabled.When
cleared, the transmitter will be di-sabled. If disabled, any word
currently inthe output register will continue to betransmitted when
XE is cleared, thetransmitter will turn off at the end of thebreak
character boundary, and no end ofbreak stop bit is transmitted. The
transmitclock must be running before the trans-mitter is enabled A
one bit always pre-cedes the first word out of the transmitterafter
the transmitter is enabled. There isa delay between the time the
transmitterenable bit is written an when the transmit-ter reset
goes low ; therefore, the H & Lbits should be written with the
desiredstate prior to enabling the transmitter.
Like the receiver section, there are two separate in-terrupt
channels associated with the transmitter.The buffer Empty condition
causes an interrupt viaone channel, while the Underrun and END
condi-tions will cause an interrupt via the second channel.When
underrun occurs in the synchronous format,the character in the SCR
will be transmitted until anew words is loaded into the transmit
buffer. In theasynchronous format, a Mark will be
continuouslytransmitted when underrun occurs.The transmit buffer
can be loaded prior to enablingthe transmitter. When the
transmitter is disabled,anycharacter currently in theprocess of
being trans-mitted will continue to conclusion, but any characterin
the transmit buffer will not be transmitted and willremain in the
buffer. Thus no buffer empty interruptwill occur nor will the BE
flag be ste. If the bufferwerealready empty, the BE flag would be
set and wouldremain set. When the transmitter is disabled with
acharacter in the output register but with no character
in the transmit buffer, an Underrun Error will not oc-cur when
the character in progress concludes.Often it is necessary to send a
break for some par-ticular period. To aid in timing a break
transmission,a transmission, a transmit error interrupt will be
ge-nerated at every normal character boundary timeduring a break
transmission. The status register in-formation is unaffected by
this error condition inter-rupt. It should be noted that an
underrun error, if pre-sent, must be cleared from the TSR, and the
inter-rupt pending register must be cleared of pendingtransmitter
errors at the beginning of the breaktransmission or no interrupts
will be generated at thecharacter boundary time.It the synchronous
format is selected, the sync char-acter should be loaded into the
Sync Character Re-gister (SCR) as shouwn in figure 20. This
characteris compared to the received serial data during aSearch,
and will be continuously transmitted duringan underrun
condition.All flags in the RSR or TSR will continue to functionas
described whether their associated interruptchannel is disabled or
enabled. All interrupt chan-nels are edge triggered and, in many
cases, it is theactual output ofa flag bit or flag bits which is
coupledto the interrupt channel. thus, if a normal
interruptproducing condition occurs while the interrupt chan-nel is
disabled, no interrupt would be produced evenif the channel was
subsequently enabled, becausea transition did not occur while the
interrupt channelwas enabled. that particular flag bit would have
tooccur a second time before another edge waspro-duced, causing an
interrupt to be generated.Error conditions in the USART are
determined bymonitoring the Receive Status Register and
theTransmitter Status Register. These error conditionsare only
valid for each word boundary and are notlatched. When executing
block tranfers or data, it isnecessary to save any errors so that
they can bechecked at the end of a block. In order to save
errorconditions during data transfer, the MK68901 MFPinterrupt
controller may be used by enabling error in-terrupt for the desired
channel (Receive error orTransmit error) and by masking these bits
off. Oncethe tranfer is complete, the Interrupt Pending Regis-ter
can be polled, to determine the precence of apending error
interrupt, and therefore an error.
V000366
MK68901
18/33
-
Unused bits in the sync character register are ze-roed out ;
therefore, word length should be set upprior to writing the sync
word in some cases. Syncword length is the word length plus one
when parityis enabled. The user has to determine the parity ofthe
syncword when the word length is not 8 bits. TheMK68901 MFP does
not add a parity bit to the syncword if the word length is less
than 8 bits. The extrabit in the sync word is transmitted as the
parity bit.With a word length of eight, and parity selected,
theparity bit for the sync word is computed an added onby the
MK68901 MFP.
RR RECEIVER READYRR is asserted when the Buffer Full bit is set
in theRSR unless a parity error or frame error is detectedby the
receiver.
TR TRANSMITTER READYTR is asserted when the Buffer Empty bit is
set in theTSR unless a break is currently being transmitted.
REGISTER ACCESSESAll register accesses are dependent on CLK
asshown in the timing diagrams. To read a register, CSandDSmust
beasserted, and R/W must byhigh. Theinternal read control signal is
essentially the combi-nation of CS, DS, and RD/WR. Thus, the read
ope-
ration will begin when CS and DS go active and willendwhen
either CS or DSgoes inactive.Theaddressbus must be stable prior to
the start of the operationandmust remain stable until theend of the
operation.Unless a read operation or interrupt acknowledge cy-cle
is in progress the data bus (D0-D7) will remain inthe tri-state
condition.To write a register, CSand DSmust beasserted andR/W must
be low. The address must be stable priorto the start of the
operation and must remain stableuntil the end of the operation.
After the MK68901 as-sertsDTACK, the CPU negates DS,. At this time,
theMFP latches the data bus and writes the contents in-to the
appropriate register. Also when DS is nega-ted, the MFP rescinds
DTACK.For an interrupt acknowledge, the operation startswhen IACK
goes low, and ends when IACK goeshigh. The data bus is tri-stated
when either IACK orDS goes high.When CS or IACK are asserted the
MFP starts aninternal cycle. DS is needed to enable the addressand
data buffers. It is recommended taht CS andIACK be gated by DS so
that DS is always presentwhenever an MFP bus cycle starts.
MK68901
19/33
-
D.C. CHARACTERISTICSTA = 0C to 70C ; VCC = + 5V 5% Unless
Otherwise SpecifiedSymbol Parameter Test Condition Min. Max.
Unit
VIH Input High Voltage 2.0 V CC + .3 VVIL Input Low Voltage 0.3
0.8 VVOH Output High Voltage (except DTACK) IOH = 120A 2.4 VVOL
Output Low Voltage (except DTACK) IOL = 2.0mA 0.5 VIL L Power
Supply Current Outputs Open 180 mAIL I Input Leakage Current VIN =
0 to VCC 10 A
IL OH Tri-state Output Leakage Current in Float VOUT = 2.4 to
VCC 10 AIL OL Tri-state Output Leakage Current in Float VOUT = 0.5V
10 AIO H DTACK Output Source Current VOUT = 2.4 400 AIOL DTACK
Output Sink Current VOUT = 0.5 5.3 mA
All voltages are referenced to ground.
CAPACITANCETA = 25C, f = 1MHz unmeasured pins returned to
ground.Symbol Parameter Test Condition Max. Unit
CIN Input Capacitance Unmeasured pins returned toground
10 pFCO UT Tri-state Output Capacitance 10 pF
MK68901 ELECTRICAL SPECIFICATIONS PRELIMINARY
ABSOLUTE MAXIMUM RATINGSSymbol Parameter Value Unit
TA Temperature under Bias 25 to + 100 CTstg Storage Temperature
65 to + 150 CVI Voltage on Any Pin with Respect to Ground 0.3 to +
7 VPD Power Dissipation 1.5 W
Stresses above those l isted under Absolute Maximum Ratings may
cause permanent damage to the device. This is a stressrating only
and functional operation of the device at these or any other
condition above those indicated in the operational sec-tions of
this specification is not implied. Exposure to absolute maximum
rating conditions for extended periods may affect re-l
iability.
MK68901
20/33
-
AC ELECTRICAL CHARACTERISTICS (VCC = 5.0Vdc 5%, GND = 0Vdc, TA =
0C to 70C)Value
MK68901-4 MK68901-5Number CharacteristicMin. Max. Min. Max.
Unit Fig. Note
1 CS, DS Width High 50 35 ns 21,22 52 R/W, A1-A5 Valid to
Falling CS (setup) 0 0 ns 21,223 Data Valid Prior to Falling CLK
280 0 ns 224 CS, IACK Valid to Falling Clock (setup) 50 45 ns 21-24
35 CLK Low to DTACK Low 220 180 ns 21,226 CS, DS or IACK High to
DTACK High 60 55 ns 21-247 CS, DS or IACK High to DTACK Tri-state
100 95 ns 21-248 DTACK Low to Data Invalid (hold time) 0 0 ns 229
CS, DS or IACK High to Data Tri-state 50 50 ns 21,23,24
10 CS or DS High to R/W, A1-A5 Invalid (hold time) 0 0 ns
21,2211 Data Valid from CS Low 310 260 ns 21 3,612 Read Data Valid
to DTACK Low (setup) 50 50 ns 2113 DTACK Low to DS, CS or IACK High
(hold time) 0 0 ns 21-2314 IEI Low to Falling CLK (setup) 50 50 ns
23,2415 IEO Valid from Clock Low (delay) 180 180 ns 23 116 Data
Valid from Clock Low (delay) 300 300 ns 2317 IEO Invalid from IACK
High (delay) 150 150 ns 23, 2418 DTACK Low from Clock High (delay)
180 165 ns 23, 2419 IEO Valid from IEI Low (delay) 100 100 ns 24
120 Data Valid from IEI Low (delay) 220 220 ns 2421 Clock Cycle
Time 250 1000 200 1000 ns 2122 Clock Width Low 110 90 ns 2123 Clock
Width High 110 90 ns 2124 CS, IACK Inactive to Rising Clock (setup)
100 80 ns 21-23 4,525 I/O Minimum Active Pulse Width 100 100 ns
2526 IACK Width High 2 2 T CL K 23-24 227 I/O Data Valid from
Rising CS or DS 450 450 ns 2628 Receiver Ready Delay from Rising RC
600 600 ns 2729 Transmitter Ready Delay from Rising TC 600 600 ns
2830 Timer Output Low from Rising Edge of CS or DS
(A & B) (reset T OUT) 450 450 ns 29 731 TOUT Valid from
Internal Timeout 2 tCL K
+ 3002 tCL K+ 300 ns 29 2
32 Timer Clock Low Time 110 90 ns 29
MK68901
21/33
-
AC ELECTRICAL CHARACTERISTICS (continued)(VCC = 5.0Vdc 5%, GND =
0Vdc, TA = 0C to 70C)
ValueMK68901-4 MK68901-5Number CharacteristicMin. Max. Min.
Max.
Unit Fig. Note
33 Timer Clock High Time 110 90 ns 2934 Timer Clock Cycle Time
250 1000 200 1000 ns 2935 RESET Low Time 2 1.8 s 3036 Delay to
Falling INTR from External Interrupt
Active Transition 380 380 ns 25
37 Transmitter Internal Interrupt Delay from FallingEdge of TC
550 550 ns 28
38 Receiver Buffer Full Interrupt Transition Delayfrom Rising
Edge of RC 800 800 ns 27
39 Receiver Error Interrupt Transition Delay fromFalling Edge of
RC 800 800 ns 27
40 Serial in Set Up Time to Rising Edge of RC(divide by one
only) 80 70 ns 27
41 Data Hold Time from Rising Edge of RC(divide by one only) 350
325 ns 27
42 Serial Output Data Valid from Falling Edge of TC(1) 440 420
ns 28
43 Transmitter Clock Low Time 500 450 ns 2844 Transmitter Clock
High Time 500 450 ns 2845 Transmitter Clock Cycle Time 1.05 0.95 s
2846 Receiver Clock Low Time 500 450 ns 2747 Receiver Clock High
Time 500 450 ns 2748 Receiver Clock Cycle Time 1.05 0.95 s 2749 CS,
IACK, DS Width Low 80 80 T CL K 29 250 Serial Output Data Valid
from Falling Edge of TC
(16) 490 370 ns 28Notes : 1. IEO only goes low if no
acknowledgeable interrupt is
pending. If IEO goes low, DTACK and the data bus re-main
tri-stated.
2. TCLK refers to the clock applied to the MFP CLK inputpin.
tCLK refers to the timer clock signal, regardless ofwhether
thatsignal comes from the XTAL 1/XTAL2crys-tal clock inputs or the
TAI or TBI timer inputs.
3. If the setup time is not met, CS or IACK will not be
reco-gnized until the next falling CLK.
4. If this setup time is met (for consecutive cycles), the
mi-nimum hold-off time of one clock cycle will be obtained.If not
met, the hold-off will be two clock cycles.
5. CS is latched internally, therefore if specs 1 and 24 aremet
then CS may be reasserted before the rising clockandstill terminate
the current bus cycle.The new buscy-cle will be delayed by the
MK68901 until all appropriateinternal operations havecompleted.
6. Although CS and DTACK are synchronized with theclock, the
data out during a read cycle is asynchronousto the clock, relying
only on CS for timing.
7. Spec. 30 applies to timer outputs TAO and TBOonly.
MK68901
22/33
-
TIMER A.C. CHARACTERISTICSDefinitions :Error = Indicated Time
Value - Actual Time Valuetpsc = tCLKx Prescale ValueInternal Timer
Mode
Single Interval Error (free running) (note 2) 100ns Cumulative
Internal Error 0 Error between Two Timer Reads (tpsc + 4tCLK) Start
Timer to Stop Timer Error + (2tCLK + 100ns) to - (tpsc + 6tCLK +
100ns) Start Timer to Read Timer Error + 0 to (tpsc + 6tCLK +
400ns) Start Timer to Interrupt Request Error (note 3) - 2tCLK to
(4tCLK + 800ns)
Notes : 1. Error may be cumulative if repetitively performed.2.
Error with respect to TOUT or INT if note 3 is true.3. Assuming it
is possible for the timer to make an interrupt request
immediately.
PULSE WIDTH MEASUREMENT MODEMeasurement Accuracy (note 1) +
2tCLK to (tpsc + 4tCLK) Minimum Pulse Width 4tCLK
EVENT COUNTER MODEMinimum Active Time of TAI, TBI 4tCLK Minimum
Inactive Time of TAI, TBI 4tCLK
MK68901
23/33
-
Figure 21 : Read Cycle.
Figure 22 : Write Cycle.
Note : CS and IACK must be a funct ion of DS.
V000367
V000368
MK68901
24/33
-
Figure 23 : Interrupt Acknowledge (IEI low).
Figure 24 : Interrupt Acknowledge Cycle (IEI high).
Note : CS and IACK must be a funct ion of DS.
V000370
V000369
MK68901
25/33
-
Figure 25 : Interrupt Timing.
Figure 26 : Port Timing.Note : Active edge is assumed to be the
r ising edge.
V000371
V000372
MK68901
26/33
-
Figure 27 : Receiver Timing.
Figure 28 : Transmitter Timing.
V000347
V000346
MK68901
27/33
-
Figure 29 : Timer Timing.
Figure 30 : Reset Timing.
V000348
V000349
MK68901
28/33
-
Figure 31 : Typical Output. Figure 32 : INTR Test Load.
For all outputs exceptDTACKCL = 100pfRL = 20kR1 = 180
For DTACKCL = 130pfRL = 6kR1 = 470
Figure 33 : MK68901 MFP External Oscillator Components.
CRYSTAL PARAMETERS :Paral lel resonance, fundamental mode AT
cutRS 150 (FR = 2.8 5.0MHz);RS 300 (FR = 2.0 2.7MHz)CL = 18pf ; CM
= 0.02pf ; Ch = 5pf ; LM = 96mHFR (typ) = 2.4576MHz
MK68901 ORDER CODESPart Number PackageType Max. ClockFrequency
TemperatureRange68901P0468901P0568901N0468901N0568901Q0468901Q05
Ceramic DIPCeramic DIPPlastic DIPPlastic DIPPlastic PLCCPlastic
PLCC
4.0MHz5.0MHz4.0MHz5.0MHz4.0MHz5.0MHz
0 to 70C0 to 70C0 to 70C0 to 70C0 to 70C0 to 70C
V000333V000373
V000374
MK68901
29/33
-
MK68901 48PIN PLASTIC DUALINLINE PACKAGE (N)
Millimeters InchesDim Min. Max. Min. Max.
A 61.468 62.738 2.420 2.470B 14.986 16.256 .590 .640C 13.462
13.97 .530 .550D 3.556 4064 .140 .160E 0.381 1.524 .015 .060F 3048
3.81 .120 .150G 1.524 2.286 .060 .090H 1.186 1.794 .090 .110J 15.24
17.78 .600 .700K 0.381 0.533 .015 .021L 0.203 0.305 .008 .012M
1.143 1.778 .045 .070
MK68901
30/33
-
MK68901 48PIN CERAMIC DUALINLINE PACKAGE (P)
InchesDim
Min. Max.A 2.376 2.424B 0.576 0.604C 0.120 0.160D 0.015 0.021F
0.030 0.055G 0.100 BSCJ 0.008 0.013K 0.100 0.165L 0.590 0.616M 0
10N 0.040 0.060
MK68901
31/33
-
MK68901 52PIN PLASTIC LEADED CHIP CARRIER (Q)
InchesDim
Min. Max.A .165 .180A1 .090 .130D .785 .795
D1 .750 .756D2 .690 .730E .785 .795E1 .750 .756E2 .690 .730H
.042 .048J .042 .048K .013 .024L .008 .014M .026 .032
N/N1 .043 .048
MK68901
32/33
-
MK68901 PIN CONNECTIONSPLCC DIP FUNC. PLCC DIP FUNC. PLCC DIP
FUNC.
123456789
101112131415161718
123456789
1011
1213141516
NCR/WA1A2A3A4A5TCSOSIRCVCCNCNC
TAOTBOTCOTDO
192021222324252627282930313233343536
1718
1920212223242526272829
303132
XTAL1XTAL2
NCTAITBI
RESETIOI1I2I3I4I5I6I7
NCTRRR
INTR
37383940414243444546474849505152
33343536373839404142434445464748
IEOIEI
CLKGNDD0D1D2D3D4D5D6D7
IACKDTACK
DSCS
Note : NC No Connection
Information furnished is believed to be accurate and reliable.
However, SGS-THOMSON Microelectronics assumes noresponsability for
the consequences of use of such information nor for any
infringement of patents or other rights ofthird parties which may
result from its use. No license is granted by implication or
otherwise under any patent orpatent rights of SGS-THOMSON
Microelectronics. Specifications mentioned in this publication are
subject to changewithout notice. This publication supersedes and
replaces all information previously supplied.SGS-THOMSON
Microelectronics products are not authorized for use as critical
components in life support devices orsystems without the express
written approval of SGS-THOMSON Microelectronics.
1994 SGS-THOMSON Microelectronics - All rights reserved.
Purchase of I2C Components by SGS-THOMSON Microelectronics
conveys a license under the Philips I2C Patent.Rights to use these
components in an I2C system is granted provided that the system
conforms to the I2C Standard
Specification as defined by Philips.
SGS-THOMSON Microelectronics Group of Companies
Australia - Brazil - France - Germany - Hong Kong - Italy -
Japan - Korea - Malaysia - Malta - MoroccoThe Netherlands Singapore
- Spain - Sweden - Switzerland - Taiwan - Thailand - United Kingdom
- U.S.A.
MK68901
33/33