Embed Size (px)
DESCRIPTION
4 Bar Mechanism Steering Sensivity
Citation preview

Optimum synthesis of the four-bar function generator inits symmetric embodiment: the Ackermann steering linkage
P.A. Simionescu *, D. Beale
Department of Mechanical Engineering, Auburn University, 201 Ross Hall, Auburn, AL 36849, USA
Received 29 October 2001; received in revised form 16 July 2002; accepted 16 July 2002
Abstract
The problem of optimum synthesis of the planar four-bar function generator is investigated and the
practical case of the Ackermann steering linkage considered as an example. The reduced number of design
parameters of this symmetric four-bar linkage allowed inspecting the design space of various types of
objective functions through 3D representations, and their properties suggestively highlighted. For practical
purposes, the numerical results were summarized in a set of parametric design-charts useful to the auto-
motive engineer in conceiving the steering linkage of a new vehicle.
� 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Four-bar mechanism; Optimum synthesis; Ackermann linkage; Steering error
1. Introduction
Synthesis of function generators is a common mechanism design problem. It requires findingthe geometric parameters for which the input–output function of the mechanism best approxi-mates a given function. Without considering the graphical methods that are of low precision andineffective for multiple loops and for spatial mechanisms, synthesis methods can be broadlyclassified into two categories: exact point approach and optimization techniques [1–3].In its classic formulation, optimum synthesis requires minimizing the deviation between an
imposed function and the actual input–output function of the mechanism, in the presence of somedimensional or functional constraints (usually maintaining practical link-length ratios, avoiding
*Corresponding author. Tel.: +1-334-844-5867; fax: +1-334-844-5865.
E-mail addresses: [email protected] (P.A. Simionescu), [email protected] (D. Beale).
0094-114X/02/$ - see front matter � 2002 Elsevier Science Ltd. All rights reserved.
PII: S0094-114X(02)00071-X
Mechanism and Machine Theory 37 (2002) 1487–1504www.elsevier.com/locate/mechmt

collision between elements and ensuring an acceptable motion transmission efficiency, i.e.,maintaining the pressure angles in the joints less than certain limits).
2. Optimum synthesis of mechanisms for the generation of functions
Suppose that a function f ðuÞ is to be generated by a mechanism over the interval ½ui; uf �, for agiven input-link stroke Du ¼ uf � ui and a given output-link stroke Dw ¼ wf � wi (where ‘‘i’’stands from initial position and ‘‘f’’ stands from final position). In order to ensure a linear de-pendence between the variable u and the input angle u, the following relation should be fulfilled:
uðuÞ ¼ ui þ K1ðu� uiÞ: ð1ÞSimilarly, a linear dependence between the function value f ðuÞ and the output angle w requiresthat:
wðf ðuÞÞ ¼ wi þ K2ðf ðuÞ � f ðuiÞÞ; ð2Þwhere K1 and K2 are termed scale factors and are given by the following formulas:
K1 ¼uf � uiuf � ui
¼ DuDu
and K2 ¼wf � wi
f ðufÞ � f ðuiÞ¼ Dw
Df ðuÞ : ð3Þ
For a certain point uj in the interval ½ui; uf � over which f ðuÞ is to be reproduced 1, the deviationbetween the imposed function wðf ðuÞÞ and the actual function generated by the mechanism wðuÞis given by:
dwðujÞ ¼ wðuðujÞÞ � wðf ðujÞÞ; ð4Þwhere wðuðujÞÞ must be determined through kinematic analysis of the mechanism.Without specifying at this point how the design variable are chosen, a mean-square-norm based
objective function that can be employed in the synthesis of a mechanism has the form:
F01ð� � �Þ ¼1
n
Xn
j¼1½wðuðujÞÞ � wðf ðujÞÞ�2 ¼
1
n
Xn
j¼1½dwðujÞ�2; ð5Þ
where n is the number of design points in the interval ½ui; uf �, not necessarily equally spaced. Ascompared to the more commonly known Euclidean norm, the mean-square-norm has the benefitthat it is less dependent on the number of design points n [4].A closer coincidence between the imposed function and the input–output function of the
mechanism it is ensured by employing a maximum-norm based objective function:
F02ð� � �Þ ¼ max jwðuðujÞÞ � wðf ðujÞÞj ¼ max jdwðujÞj ð6Þin that at the optimum point the extreme negative and positive errors, calculated with relation (4),will result equal [5,6]. The value of the function is also easy interpretable and can be used forcomparisons and quick evaluations of the performance of the mechanism solution, without theneed to determine the actual output error of the mechanism through kinematic analysis. However,
1 We make here the observation that u1 and un must not be the ends of the interval [ui; uf ].
1488 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

F02 suffers from the fact that it is not differentiable, being less suitable for minimization using agradient-based searching algorithm (later in this paper a remedy to the nondifferentiability of themaximum-norm objective functions will be proposed). This is why F01, which is differentiable,continues to be the most preferred objective function in doing optimum mechanism synthesis [2,6].
3. Four-bar function generator synthesis
In case of the four-bar planar mechanism (Fig. 1a), alternative optimum synthesis methodshave been proposed [2,7,8], like solving the over-determined systems of equations of constraint fora minimum sum-of-squares of the residuals dBCj:
Xn
j¼1ðdBCjÞ2 ¼ ðBC� BC
j Þ2; ð7Þ
where n is the number of design points, BC is the coupler length and BCj the variable distance
between joints B and C given by the known formula:
BCj ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxBj � xCjÞ
2 þ ðyBj � yCjÞ2
qð8Þ
with
xBj ¼ ABcosuðujÞ �AD=2; yBj ¼ ABsinuðujÞ;xCj ¼ CDcoswðujÞ þAD=2; yCj ¼ CDsinwðujÞ:
ð9Þ
Freudenstein�s equation [9], that can be derived through algebraic manipulation from the sameEqs. (7)–(9), have been also used in defining over-determined systems of equations that weresolved for minimum residual error [10].Since the input–output function of the four-bar linkage is scaling invariant, the link lengths are
usually normalized with respect to the ground link length AD or with the input link length AB, orthese lengths are imposed fixed values during synthesis.In Fig. 1b a modified four-bar mechanism is shown that has an extra degree of freedom; this
feature allows the input and output links to be positioned exactly in accordance with the imposed
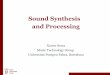
Fig. 1. Schematic of a planar four bar mechanism shown in a current position j (a), and the corresponding modified
2DOF mechanism with variable-length coupler used in defining the objective function F03, F04 and F05 (b).
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1489

function. For j ¼ 1; . . . ; n design points, a maximum-norm based objective function to be mini-mized, describing the condition that the distance between the joint centers B and C of this 2DOFmechanism is to vary as little as possible during its working range (and therefore ensuring that thecorresponding four-bar mechanism will best approximate the given function) is:
F03ð� � �Þ ¼ max jBC� BCj j ¼ max jdBCjj: ð10Þ
This resembles solving the over-determined system of equations of constraint for a minimumresidual error. It is to be noticed that for a number of design-points n less than or equal to 5 (themaximum number of design variables in case of planar four-bar function generator synthesis) thesystem of equations becomes determined and the transition to the zero-order exact point synthesisis made. (It is briefly mentioned here that higher order synthesis can also be applied to themechanism, that is, to impose, together with the position of the output link, the velocity, and eventhe acceleration values in some design points [1]).The idea of using in the synthesis process of a modified mechanism with a variable-length
coupler was introduced in the fifties by Artobolevsky et al. [11]. Because an associated mechanismwith an extra degree of freedom is used in defining the objective function, it was termed in [12], inan attempt to describe a more general approach, the method of increasing the degree of freedom ofthe mechanism. So far it has been successfully applied to synthesize four-bar, Stephenson II andStephenson III, and Watt II planar mechanisms, and spatial four-bar and slider-crank mecha-nisms [3,7,8,11–13].The main disadvantage of employing an objective function of the type (10) is that the global
minimum corresponds to a degenerate mechanism, having some of the elements of zero length(this was first noticed in [3] and it will be suggestively highlighted through 3D representations ofthe objective function in the following paragraph). Considering a four-bar linkage normalizedwith respect to the ground-link (AD ¼ 1), the global minimum will correspond to zero-lengthinput and output link mechanisms (AB ¼ CD ¼ 0). In the case of a normalized four-bar linkagewith AB ¼ 1, the global minimum will correspond to a mechanism having AD ¼ CD ¼ 0. Thesame degenerate solution is obtained when solving for minimum residuals the over-determinedsystem of equations (7). However, if Freudenstein�s equation is used instead, this degeneracy isavoided because the lengths of the input and output links appear in the denominator. Therefore,by dividing the expression of the objective function F03 with the length CD of the output link:
F04ð� � �Þ ¼ max jðBC� BCj Þ=CDj ¼ max jdBCj=CDj ð11Þ
the convergence to degenerate mechanism solutions will be avoided, since for CD approachingzero the function�s value approaches infinity. F04 has the advantage over an objective function F03that its feasible domain is fully continuous and has a smoother variation, therefore reducing tosome extent its nonlinearity. The main disadvantage of the objective function F04 resides in thefact that its value is not a direct measure of the output error, and therefore cannot be used forquick evaluation of the performance of the mechanism obtained. Consequently, a kinematicanalysis is required to determine the input–output function of the mechanism and, further on, theactual output error.Based on kinematic considerations, it has been proven that between the coupler-length varia-
tion dBCj and the output error dwj the following approximate relation exists [8,11]:
1490 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

dwj ffi dBCj=ðCDcoslCjÞ; ð12Þ
where lCj is the pressure angle in the joint C of the 2DOF associate mechanism calculated for a
given design position j. The pressure angle is defined as the angle between the velocity of the joint-center and the reaction force inside the joint, which, for mechanism performing relatively slowmotions, coincides with the axis of the coupler. For planar four-bar linkages, the pressure angle isthe complement of the more commonly used transmission angle, which however does not have adirect equivalent in case of spatial four-bar mechanisms.A more appropriate objective function to be minimized, that combines the favorable properties
of F04 with a good estimate of the output error dwj, will be:
F05ð� � �Þ ¼ max jðBC� BCj Þ=ðCDcosl
CjÞj ¼ max jdBCj=ðCD � coslCjÞj: ð13Þ
The pressure angle lCj can be determined in several ways, the simplest being to subtract 90� from
the angle occurring between vectors BCj and DC
j :
lCj ¼ 90�� arctan jBC
j �DC
j j=jBC
j �DC
j j ð14Þ
since the instantaneous velocity vector, noted V in Fig. 1b, is perpendicular to the output linkvector CD.In the following, a new proof of the above relation (12) will be given based on the elastic-
coupler mechanism in Fig. 2. If an external moment Mj is applied at the output link whilemaintaining the input link fixed, the angular error dwj can be brought to zero through the de-formations of the coupler (considered linearly elastic of rate ke, while the other elements areconsidered infinitely rigid). Since the work generated by the moment Mj is equal to the defor-mation energy of the coupler, the following relation holds:Z BCj
BC
kedBCjdBC ¼Z dw
0
MðwÞdw ð15Þ
which results in:
0:5kedBC2j ¼ 0:5Mmax jdw; ð16Þ
Fig. 2. Four-bar mechanism with elastic coupler used to demonstrate the approximate relation between the output
error dwj and the coupler-length variation dBCj.
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1491

where Mmax j is the final value of the moment Mj for which dwj becomes zero. This equation,together with equation (17), derived from the free-body-diagram of joint C, with Fej the reactionforce in this joint:
Mmax j=CD ¼ Fej coslCj ¼ kedBCj cos l
Cj ð17Þ
results, after eliminating ke, in the same relation (12). Fig. 2 reminds of the minimum-energydeformation synthesis methods [14]. Here however it is used only for the proof of the approximaterelation (12).Because in a synthesis problem the pressure angle is determined for the deformed coupler (the
input and output link in the imposed positions), it is obvious that relation (12) is an exact one onlyfor l
Cj ¼ lCj. Therefore, the closer to the minimum the better the approximation will be for boththe pressure angle and the output error, which means that l
C can be used with confidence inchecking the maximum value of the pressure angle during the optimization process, and appro-priate penalty functions can be defined using this parameter.It is to be observed that the above equations (10)–(17) are directly applicable to the synthesis of
the spatial four-bar function generators (when appropriate expressions for the coordinates ofjoints B and C must be used), case in which the simplifications resulting from the avoidance of thedirect use of the input–output function of the mechanism are even more significant than in thecase of the planar mechanism [4].
4. The Ackermann linkage synthesis
The Ackermann steering linkage (see Figs. 3 and 4) that will be further investigated is asymmetric four-bar function generator, a consequence of the identical steering requirements forthe turning of the vehicle to the left and to the right. All real steering mechanisms are complexspatial linkages and the parameters defining their geometry are quite numerous. However, from akinematic standpoint, when side-slipping and tire elasticity are neglected, the turning geometry ofa real vehicle is not affected by change of scale. For this reason it is possible to utilize a singlevehicle size parameter viz. the wheelbase vs. wheel track ratio, and dimensionless link lengths,which by re-scaling result in the required dimensions of a practical steering mechanism. This
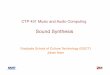
Fig. 3. Ackermann linkage approximated as planar four-bar mechanism displayed in the reference position corre-
sponding to the straight-ahead motion of the vehicle (a), and the associated 2DOF mechanism with variable-length
coupler similar to the one in Fig. 1b (b).
1492 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

normalization of linear dimensions reduces by one the total number of geometric parameters. Byfurther neglecting the kingpin inclination and camber angles, and considering the Ackermannlinkage as a planar mechanism, important simplifications can be achieved, resulting in a reductionof the total number of design parameters to only 2. The reduced number of design parameters willallow visualizing the shape of the various objective functions introduced before, and theirproperties suggestively highlighted.Some empirical recommendations of how to synthesize the Ackerman steering linkage are
available in the literature [15–18]. The first analytical design of the planar Ackermann linkage wasperformed by Wolfe [16] who combined the synthesis equation of the four-bar linkage and thecondition of correct turning of the vehicle into an approximate relationship in two geometricparameters of the steering mechanism. This approach led him to consider as design variables thenormalized steering knuckle arm length and the wheelbase/wheel track ratio. Parameter nor-malization was also used by Rao [17] in tackling the design of the same linkage. Using an exactpoint approach, the author produced a number of design charts, which, however, appear difficultto use mainly because of the impractical correlation chosen between the different geometricalparameters of the mechanism.One of the main requirements of the steering mechanism of a vehicle is to give to the steerable
wheels a correlated turning, ensuring that the intersection point of their axis lies on the extensionof the rear wheel axis (point Q in Fig. 4b), which is equivalent to the following relation (thecondition of correct turning, due to Ackermann):
hOAðhIÞ ¼ arctan1
cot hI þ 1=ðWb=WtÞ; ð18Þ
where hI is the turning angle of the inner wheel, hOA is the ideal turning angle of the outer wheel,while Wb and Wt are the wheelbase and the wheel track of the vehicle respectively. In the above
Fig. 4. Variants of steering control used in conjunction with Ackermann linkages (a), and schematic of a four-wheel
vehicle during turning (b)––for the position shown, relation (18) is exactly verified (according to [4] Ackermann steering
linkage cannot ensure more than one exact point during turning).
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1493

expression (18) it is usual to approximate the front wheel track Wt to the kingpin track AD as willbe done in the following.The deviation between the desired and the real turning angle provided to the wheels by the
steering mechanism is called the steering error. Because the steering knuckle maximum pivotingangle hImax is limited by the final drive performances or by possible wheel–axle or wheel–bodyinterference, it is best to evaluate the steering error at the outer wheel, taking the steering knucklefrom the inside of the turn as input element:
dhOðhIÞ ¼ hOðhIÞ � hOAðhIÞ; ð19Þwhere hO is the turning angle of the outer wheel and hOA is the ideal turning angle calculated withrelation (18). This definition of the steering error is in accordance with the fact that the steeringcontrol is achieved by actuating one of the steering knuckles, which can be considered as inputlink; there are however vehicles where the Ackerman linkage is controlled via hydraulic cylindersacting upon the tie rod (Fig. 4a).The normalized planar Ackermann linkage shown in Fig. 3a is defined by two parameters: the
initial angle u0 and the length l of the steering knuckle arm. The distance between the two groundjoints A and D is given unit value and consequently, all the linear dimensions of the mechanismare normalized with respect to Wt since AD ffi Wt.Following the considerations in the previous paragraph, the 2DOF associated mechanism with
a variable-length coupler to be used in synthesis will look like the one in Fig. 3b. A maximumnorm objective function equivalent to F05 in (13) will have in this case the form:
F5ðl;u0Þ ¼ maxBC
j � BCl cos l
Cj
���������� ¼ max
dBCj
l coslCj
����������: ð20Þ
In the above relation the distance BCj between joints B and C corresponding to a current position
j ¼ 1; . . . ; n is given by the same Eq. (8), with the difference that:xBj ¼ l cosðp � u0 � hOAðhIjÞÞ � 0:5; yBj ¼ l sinðp � u0 � hOAðhIjÞÞ;xCj ¼ l cosðu0 � hOjÞ þ 0:5; yCj ¼ l sinðu0 � hOjÞ;
ð21Þ
and the current turning angle hIj of the inner wheel is:
hIj ¼ jhImax=n ð22Þwhile hOAðhIjÞ is the theoretical angle imparted to the outer wheel; notice that j ¼ 1; . . . ; n ensuresthat hI > 0, thus avoiding the singularity in equation (18).The reference length of the tie-rod BC in relation (20) is obtained by considering the steering
knuckle arms in the straight-ahead position of the wheels, that is hI ¼ hO ¼ 0:BC ¼ 1þ 2l cosu0: ð23Þ
According to Lukin et al. [18] the length of the steering knuckle arm l varies from vehicle tovehicle, usually ranging between 0.14 and 0.18 of the wheel track (Wt), while the wheelbase/wheeltrack ratio (Wb=Wt) ranges between 1.4 and 2.4.A plot of the objective function F5 in the case of a vehicle having the size ratio Wb=Wt ¼ 1:9 and
for n ¼ 60 is shown in Fig. 5d. The maximum turning angle of the inner wheel was consideredhImax ¼ 40�, a common value for front-wheel drive automobiles (in case of rear wheel drive
1494 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

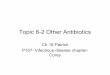
Fig. 5. Graphic representations generated for Wb=Wt ¼ 1:9, hImax ¼ 40� and n ¼ 60 of the objective function F1(equivalent to F01) (a) and of the objective function F2 (equivalent to F02) (c), to be compared with the objective functionF6 (mean-square norm of the approximate steering error) (b) and with the objective function F5 (d). Also given are thegraphs of the square of F2 (e) and square of F5 (f) which no longer experience tangent and curvature discontinuitiesaround minima.
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1495

vehicles and agricultural tractors, this angle may be larger, up to 50–55�). In Fig. 5b is given a plotof an approximate-steering-error mean-square-norm based objective function denoted F6. Forclarity, the upper parts of all graphs in Fig. 5 have been trimmed out together with the occasionaldiscontinuities that might occur for l
Cj ¼ 90�. The wider continuity of the approximate-steering-error based objective functions F5 (maximum norm) and F6 (mean-square norm) is visible whencomparing their graphs with the similar graphs of exactly calculated output-error based objectivefunctions F2 (Fig. 5c) and F1 (Fig. 5a). An extended feasibility domain is beneficial to the opti-mization process, ensuring the convergence of the search even for starting points distant from theminimum.The graphs in Fig. 5c and d show clearly the tangent and curvature discontinuity near the
optimum of all maximum-norm objective functions, which is likely to impair the convergencecapabilities of first and second order optimization algorithms (particularly in the final stages ofthe search). As Fig. 5e and f show, a remedy to the tangent and curvature discontinuity of themaximum-norm based objective functions is to square the respective functions. For example, thefunction represented in Fig. 5e would have the following expression:
F 22 ðu; lÞ ¼ max jhOðhIjÞ�
� hOAðhIjÞj�2 ¼ max hOðhIjÞ
�� hOAðhIjÞ
2; ð24Þ
where hIj ¼ jhImax=n and j ¼ 1, n. This can be termed square-max norm and the objective functionsemploying this type of norm are supposed to behave better when minimized using searchingsubroutines that calculate the gradient by finite differences.For comparison purposes in Fig. 6a and b are given the plots of the objective functions F3
equivalent to F03 (showing that its global optima correspond to degenerate mechanisms withl ¼ 0), and of the objective F4 equivalent to F04 (that does not experience this degeneracy). Visiblefrom both Figs. 5 and 6 is that there are two minimum steering error domains, one occurring forthe angles u0 around 110� (which is the trailing Ackermann linkage) and the other for the angle u0around 290� (which is the leading Ackermann linkage). It may also be seen from Fig. 5 thatvariation of the steering knuckle arm length l has a relatively small effect upon the steering error,
Fig. 6. Graphic representations generated for Wb=Wt ¼ 1:9, hImax ¼ 40� and n ¼ 60 of the objective function F3,equivalent to F03 (the global optima of which correspond to degenerate mechanism solutions with l ¼ 0) (a), and of theobjective function F4, equivalent to F04 (which does not experience this degeneracy, being however not defined for l ¼ 0)(b).
1496 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

and therefore its value can be chosen based on other criteria, like the maximum possible reactionforces occurring in the joints B and C or space limitation imposed by other neighboring parts ofthe chassis and engine.If however larger values of the length of the steering-knuckle arm are investigated, a shift of
minimum domains will occur as can be seen from Fig. 7. This is in accordance with a recentfinding of Yao and Angeles [19], who investigated the global-minima of an objective functionequal to the sum of squares of the residuals of Freudenstein�s equations of the planar Ackermannlinkage. The global-optimum mechanism is not directly applicable due to impractical link-lengthratios, and therefore in the referred paper [19] it is suggested using instead of a kinematicallyequivalent Watt II linkage, derived with the aid of its correspondent focal six-bar linkage.It is to be expected that the mechanism solutions obtained through optimization will be de-
pendent on the type of objective function employed (mean square or maximum norm based) andof the number n and spacing of the design-points. The distribution of the design points has no-table influence upon the results obtained only if they are in small number, comparable to themaximum number of exact points that can be imposed to the mechanism. This aspect will not bediscussed here since it relates more to exact-point synthesis [1], and only the case of equally spaceddesign points will be considered.In Fig. 8 it is given the variation with the number of design points n of the optimum angle u0
obtained by minimizing the objective functions F1 and F2. In case of the objective function F1 thereis a smooth, monotonic variation of the optimum angle u0 towards an asymptotic value, anapproximation of which can be found (with some computational effort), by running the optimi-zation for n very large. In case of the objective function F2, this variation is nonmonotonic, havingthe same trend towards a limit value corresponding to n approaching infinity. However, this limitvalue can be calculated precisely without resorting to a very large number of function evaluations,by making use of the following substitution:
minj¼1;1
ðdhOjÞ ¼ min f ðhIÞ ¼ min jdhOðhIÞj ð25Þ
and performing a one-dimensional minimization of the function f ðhIÞ ¼ jdhOðhIÞj over the in-terval ð0; hImax�.
Fig. 7. Plots of the objective functions F1 (a) and F2 (b) generated for Wb=Wt ¼ 1:9, hImax ¼ 40� and n ¼ 60 an increaseddomain of the variable l, showing of shift in the global minimum domain (note that orientation of the z-axis is reversed).
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1497

A number of numerical experiments have been carried out with the objective functions definedso far: F1, F2, F3 and F4 and of their mean-square and square-max norm counterparts, includingvariants in which the maximum norm was calculated by searching for the maximum of thefunction f ðhIÞ using Brent�s algorithm [20]. The values of the optimum angle u0 calculated forWb=Wt ¼ 1:9, hImax ¼ 40� and n ¼ 60 together with the corresponding maximum steering errors(determined by minimizing the same function f ðhIÞ for 06 hI6 hImax) and the relative computa-tion effort are gathered in Table 1.It is confirmed that mean-square-norm based objective functions ensure a faster convergence of
the searching algorithm than maximum-norm objective functions. The results also show some
Fig. 8. Variation with the number of design points n of the optimum angle u0 obtained when minimizing objectivefunction F1 (a) and F2 (b), in case of the trailing linkage with l ¼ 0:16 and for Wb=Wt ¼ 1:9 and hImax ¼ 40�.
Table 1
Comparison between the optimum solutions obtained for various objective functions in case of Wb=Wt ¼ 1:9,hImax ¼ 40� and l ¼ 0:16Objective function
(j ¼ 1; . . . ; 60)Trailing Ackermann linkage Leading Ackermann linkage
Optimum u0 Max. error CPU Optimum u0 Max. error CPU
Mean-square norm of:
BCj=l or BCj 109.76569 0.69358 1.000 295.88067 0.60770 1.000
Approximate dhOj 109.73893 0.68799 1.545 295.89347 0.60961 2.000
Exact dhOj 109.74116 0.68846 4.545 295.89253 0.60947 3.454
Max norm of:
BCj=l or BCj 109.18607 0.54755 3.000 295.16230 0.42054 2.545
Approximate dhOj 109.15783 0.53428 4.000 295.17160 0.41953 4.454
Exact dhOj 109.15899 0.53405 7.000 295.17114 0.41939 7.000
Exact dhO (min dhO deter-mined iteratively)
109.15921 0.53401 5.454 295.17115 0.41939 6.000
Square max norm of:
BCj=l or BCj 109.18607 0.54755 2.454 295.16230 0.42054 2.454
Approximate dhOj 109.15783 0.53428 4.454 295.17160 0.41953 4.000
Exact dhOj 109.15899 0.53405 6.454 295.17115 0.41939 6.454
Exact dhO (min dhO deter-mined iteratively)
109.15921 0.53401 5.000 295.17115 0.41939 5.454
1498 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

convergence-speed improvements in case of the square-max-norm based objective functions, whilethe results are (almost) identical with those obtained using the maximum norm based objectivefunctions (the identical results listed in the table for these two functions are due to the fact that thesquare-max-norm based objective functions have been actually scaled with a factor of 100).Also visible from Table 1 is a convergence increase in case of maximum or square-max-norm
based objective functions with the maximum error calculated iteratively. One possible strategythat can help further reducing the computation effort is to begin the search with a mean-square-norm based objective function and shift towards the end of the search to a maximum-norm basedobjective function that ensure more precise mechanism solutions. It is evident from Table 1 thatthe optimum mechanisms derived by minimizing the maximum-norm and square-norm basedobjective functions, ensure the best precision.The fluctuations visible on the graph in Fig. 8b can be also exploited in forcing an exploratory
effect of the search, by first considering a small number of design points, that can be increased asthe search advances, with the possibility of resorting to a precise evaluation of the maximumoutput error close to the optimum.
5. Ackermann linkage design recommendations
One important functional requirement that has to be considered in the design of any mecha-nism is the insurance of a good motion-transmitting efficiency and avoiding joint jamming, whichis equivalent to limiting the maximum deviation from 0� of the pressure angle in the joints. Forthe Ackermann linkage, this translates into the requirement that the pressure angle lC, orthe approximate angle l
C calculated with relation (14), does not exceed some maximum value,usually 45–50�. If a self-return of the output link is ensured due to the action of gravity or ofother active forces, even larger deviations of the pressure angles can be considered acceptable.This is the case of the real Ackerman steering linkage, where the caster and camber angles have aself-aligning effect upon the steering wheels. Therefore a maximum value of the pressure angle of65� was considered acceptable, and was included as inequality constraint in the optimizationprocess.By minimizing with respect to u0 a square-max norm version of objective function F1 completed
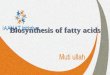
with the constraint lC6 65� using Brent�s algorithm, the 3D parametric design charts in Figs. 9and 10 have been generated. These charts permit determining a proper initial angle u0 of thesteering knuckle arm in the case of a vehicle with a known Wb=Wt ratio and for an imposedmaximum turning angle hImax and a given steering knuckle arm normalized length l. The designchart in Fig. 9 should be used when selecting the parameters of a trailing Ackermann linkage,while the one in Fig. 10 should be used when designing a leading Ackermann linkage. Also givenare performance charts showing the expected maximum steering error dhO and maximum pressureangles lC in the joints the corresponding steering mechanism will ensure.It is to be expected that the optimum parameters selected using the proposed charts will not
require modifications in the case of the real steering mechanism, with nonzero kingpin inclinationand camber angles. The designer will however need to calculate the exact maximum pivoting angleof the outer wheel (necessary for further dimensioning of the steering control mechanism) thatmight differ to some extent from the planar simplified mechanism.
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1499

Fig. 9. Design charts useful for selecting the optimum angle u0 of a trailing Ackermann linkage (a), accompanied byperformance charts showing the maximum steering error (b) and the maximum pressure angle in the joints (c) that can
occur during operation.
1500 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

Fig. 10. Design charts useful for selecting the optimum angle u0 of a leading Ackermann linkage (a), accompanied byperformance charts showing the maximum steering error (b) and the maximum pressure angle in the joints (c) that can
occur during operation.
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1501

6. Sensitivity analysis of the Ackermann linkage
It has been shown earlier that variations of the steering knuckle arm length l have little in-fluence upon the maximum steering error of the mechanism, and any manufacturing errors willhave negligible influence upon the mechanism�s performance. The angle u0 of the steering knucklearm might also experience variations about the prescribed value, due to incorrect front wheel toe-angle adjustment (presumably less than �1�) and to lesser extent due to manufacturing and as-sembling tolerances. The design charts in Figs. 9 and 10 show that, if within the above limits, theyhave little effect upon the steering error.There are however practical situations in which the geometric parameters of the steering
mechanism experience significant modifications. These are the cases when the vehicle to beequipped with an Ackermann steering linkage is to have an adjustable wheelbase or wheel track.This requirement is usual for agricultural tractors and the like, the wheels of which must matchthe available space between various crop rows. It is therefore important to know how to select themain design parameter u0 such that the steering performance will be satisfactory in any cir-cumstances. There are also cases when the designer may deliberately choose to have an increasedmaximum positive steering error in the sense of equation (19) and therefore it is of interest toknow the direction in which to modify the parameter u0, as provided by the proposed designcharts, in order to achieve this. According to [21], an enlarged positive steering error will cause areduction of the minimum turning radius of the vehicle and, correspondingly, a better maneu-verability in narrow spaces. To answer these questions, the following function has been graphi-cally studied:
F 2 ðl;u0Þ ¼
max dhOj for jmax dhOjjP jmin dhOjj;min dhOj for jmin dhOjjP jmax dhOjj;
ðj ¼ 1; . . . ; nÞ; ð26Þ
where hOj is calculated as for the case of objective function F2 (which is equal to the maximumnorm of an approximate steering error), for the same number of points n ¼ 60 and maximumturning angle hO max ¼ 40�, such that jF
2 j is identical to F2. Plots of this new function F 2 gen-
erated for the case of a vehicle having the normalized length of the steering knuckle arm l equal to0.16 and for trailing and leading Ackermann linkages are given in Fig. 11a and b. The same
Fig. 11. Variation with Wb=Wt and with u0 of the maximum steering error (positive or negative) in case of a trailing
Ackermann linkage (a) and of a leading Ackermann linkage (b) with l ¼ 0:16 and hImax ¼ 40�.
1502 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504

graphs, but for an exact calculated steering error, are available in [22] and show that the differ-ences are almost undetectable.By comparing Fig. 11a and b, one can also observe that the leading Ackermann linkage of a
given vehicle is slightly less sensitive to Wb=Wt variations than the trailing linkage is. The samegraphs show that for a vehicle having an adjustable wheelbase or wheel track it is better to choosethe optimum angle u0 corresponding to the maximum achievable Wb=Wt ratio. In this case, thesteering error of a mechanism with same length and angle u0 of the steering knuckle arm will bepositive for lower Wb=Wt ratios, a more favorable case than a negative steering error.
7. Conclusions
A review of the most common type of objective used in mechanism synthesis have been carriedout. For the simple case of the planar Ackermann steering linkage the properties of these objectivefunctions have been investigated via 3D representations and numerical experiments. The calcu-lation of the maximum absolute error in maximum norm based objective functions has beensolved for the first time as a one-dimensional optimization problem, and some benefits of thisapproach highlighted. A new norm named square-max norm has been proposed to be used indefining objective functions, which has all the benefits of the known maximum norm based ob-
jective functions, and in addition ensures tangent and curvature continuity near the optimum.The influence of the number of design points n upon the optimum solution in the case of
maximum norm based objective functions suggested starting the optimization with a small n andincrease its value as the search approaches optimum; the benefits are an increased exploratoryeffect of the search and a reduction of the overall computation effort. Also beneficial can be thesuccessive use of different objective functions during optimization, however with the disadvantageof increasing the problem preparation time.Finally a number of 3D parametric design charts have been proposed that can help the au-
tomotive engineer in determining the optimum geometry of the Ackermann steering linkage of avehicle. Performance charts of the maximum steering error and pressure angle in the joints havealso been provided, together with a study of the sensitivity of the mechanism error upon pa-rameter variation. This sensitivity analysis is particularly useful when a selection has to be madebetween a trailing or a leading Ackermann linkage, or when designing an adjustable wheelbase orwheel track vehicle.
References
[1] A.G. Erdman, G.N. Sandor, S. Kota, Mechanism Design: Analysis and Synthesis, Prentice Hall, 2001.
[2] A.G. Erdman (Ed.), Modern Kinematics. Developments in the Last Forty Years, Wiley, New York, 1993.
[3] C.H. Suh, A.W. Mecklenburg, Optimal design of mechanisms with the use of matrices and least squares,
Mechanism and Machine Theory 8 (1973) 479–495.
[4] P.A. Simionescu, Contributions to the Optimum Synthesis of Linkage Mechanisms with Applications, Doctoral
Dissertation, Polytechnic University of Bucharest, 1999.
[5] L. Markus, The synthesis of mechanisms as a minimax principle of the optimal selection of parameters,
Proceedings of the First International Symposium on Mechanisms and Computer Aided Design Methods,
Bucharest, A (1973) 422-429.
P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504 1503

[6] K. Kurien Issac, A nondifferentiable optimization algorithm for constrained minimax linkage function generation,
Transactions of ASME Journal of Mechanical Design 115 (1993) 978–987.
[7] R.I. Alizade, A.V. Mohan Rao, G.N. Sandor, Optimum synthesis of four-bar and offset slider-crank planar and
spatial mechanism using the penalty function approach with inequality and equality constraints, Transactions of
ASME Journal of Engineering for Industry 97 (1975) 785–790.
[8] N.I. Levitskii, Y.L. Sarkissyan, G.S. Geckian, Optimum synthesis of four-bar function generating mechanism,
Mechanism and Machine Theory 7 (1972) 387–398.
[9] F. Freudenstein, Approximate synthesis of four-bar linkages, Transactions of the ASME 77 (1955) 853–861.
[10] J. Angeles, Optimal synthesis of linkages using Householder reflections, Proceedings of the 5th World Congress on
the Theory of Machines and Mechanisms, Montreal 1 (1979) 111–114.
[11] I.I. Artobolevsky, N.I. Levitskii, S.A. Cercudinov, Synthesis of Planar Mechanisms, Fizmatghiz, Moscow, 1959.
[12] P.A. Simionescu, P. Alexandru, Synthesis of function generators using the method of increasing the degree of
freedom of the mechanism, Proceedings of the Ninth World Congress on the Theory of Machines and Mechanisms,
Milan 1 (1995) 139–143.
[13] P.A. Simionescu, M.R. Smith, I. Tempea, Synthesis and analysis of the two loop translational input steering
mechanism, Mechanism and Machine Theory 35 (2000) 927–943.
[14] R. Aviles, E. Amezua, A. Hernandez, An energy-based general method for the optimum synthesis of mechanisms,
Journal of Mechanical Design 116 (1994) 127–136.
[15] T. Bevan, The Theory of Machines Longmans, Green and Co., London, 1943.
[16] W.A. Wolfe, Analytical design of an Ackermann steering linkage, Transactions ASME Journal of Engineering for
Industry 11 (1959) 11–14.
[17] R. Rao, Steering linkage design. A method of determining the configuration of the steering linkage so that the
geometry conforms to Ackermann principle, Automobile Engineer 58 (1968) 31–33.
[18] P. Lukin, G. Gasparyants, V. Rodionov, Automobile Chassis, Design and Calculation, Mir, Moscow, 1989.
[19] J. Yao, J. Angeles, The kinematic synthesis of steering mechanisms, Transactions of the CSME 24 (2000) 453–476.
[20] R.P. Brent, Algorithms of Minimization Without Derivatives, Prentice-Hall, New York, 1973.
[21] J. Reimpell, H. Stoll, The Automotive Chassis: Engineering Principles, Arnold, London, 1996.
[22] P.A. Simionescu, M.R. Smith, Single valued function representations in linkage mechanisms design, Mechanism
and Machine Theory 35 (2000) 1709–1726.
1504 P.A. Simionescu, D. Beale / Mechanism and Machine Theory 37 (2002) 1487–1504