Embed Size (px)
Citation preview
4/12/2007 dhartman, CS296-3 1
A Survey of Socially Interactive Robots
Terrance Fong, Illah Nourbakhsh, Kerstin Dautenhahn
Presentation by Dan Hartmann
4/12/2007 dhartman, CS296-3 2
Context - History The first work in social robotics involved
stigmergy as a model for behavior in insect colonies
Stigmergy was described to explain how social insect societies produce complex behavior patterns, from individuals performing simple ones.
4/12/2007 dhartman, CS296-3 3
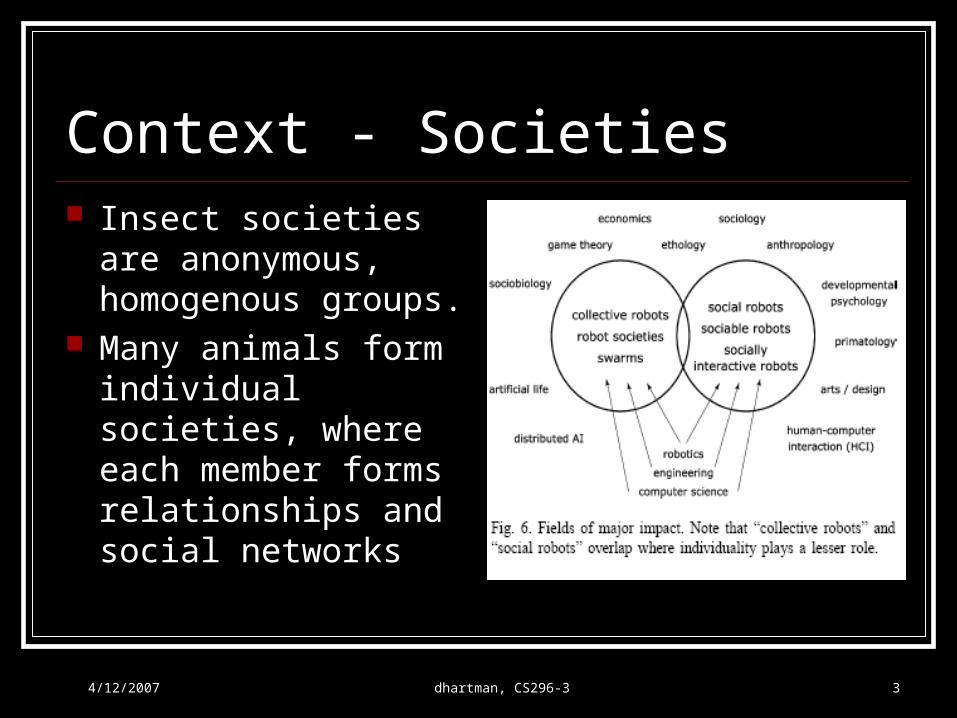
Context - Societies Insect societies are
anonymous, homogenous groups.
Many animals form individual societies, where each member forms relationships and social networks
4/12/2007 dhartman, CS296-3 4
Context – Breazeal’s Four Classes of Social Robots
Socially Evocative Relies on the human
tendency to anthropomorphize
Social Interface Provides a natural
interface by employing human-like social cues
Socially Receptive Socially Passive but
benefits from interaction e.g. learning from
demonstration
Sociable Pro-actively engages
with humans to satisfy internal social aims
4/12/2007 dhartman, CS296-3 5
Context – Three More Suggested Classes
Socially Intelligent Show aspects of human style social intelligence, based on
deep models of human cognition.
Socially Situated Surrounded by a social
environment, they must be able to distinguish between social agents and other objects.
Socially Embedded Physically connected to a
social environment requiring at least rudimentary social concepts, such as taking turns.
4/12/2007 dhartman, CS296-3 6
Context – Paper’s Scope This paper focuses on
"peer-to-peer" human-robot interaction…
The underlying assumption is that humans prefer to interact with machines in the same way that they interact with other people
Robots with human social characteristics including:
4/12/2007 dhartman, CS296-3 7
Methodology – Design Issues Natural human-robot
interaction manifest believable
behavior, establish appropriate social expectations
Real-time performance Must operate at human
interaction rates
Readable social cues Must send signals to the
human to provide social feedback.
4/12/2007 dhartman, CS296-3 8
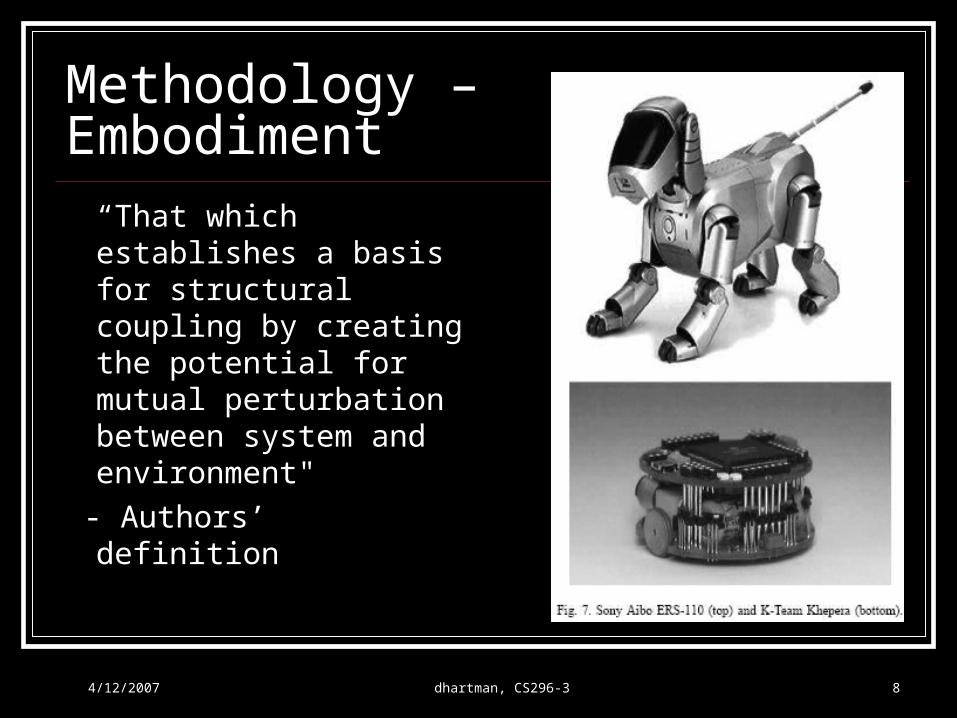
Methodology – Embodiment
“That which establishes a basis for structural coupling by creating the potential for mutual perturbation between system and environment"
- Authors’ definition
4/12/2007 dhartman, CS296-3 9
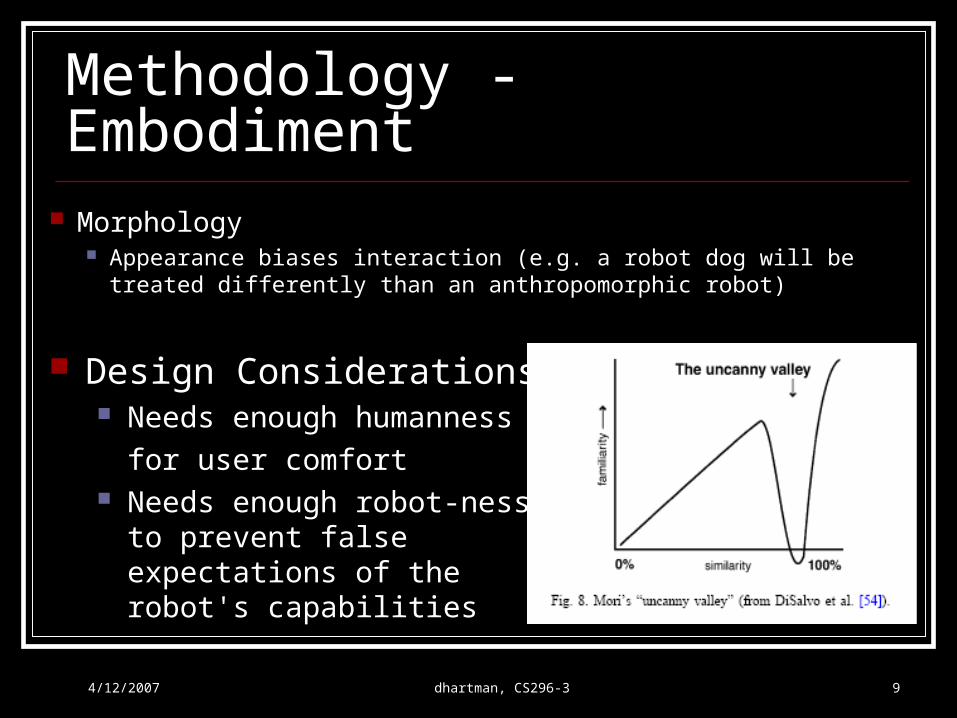
Methodology - Embodiment Morphology
Appearance biases interaction (e.g. a robot dog will be treated differently than an anthropomorphic robot)
Design Considerations Needs enough humanness
for user comfort Needs enough robot-ness to
prevent false expectations of the robot's capabilities
4/12/2007 dhartman, CS296-3 10
Methodology - Embodiment
Anthropomorphic Many argue that to interact
socially with people a robot should resemble a human
Caricatured Realism is not necessarily
needed for believability.
Functional The embodiment should reflect
the tasks it must perform.
Zoomorphic Most common are "pet"
type robots Human-creature
relationships are simpler than human-human relationships
Easier to avoid the "uncanny valley“ in previous slide
4/12/2007 dhartman, CS296-3 11
Methodology – Human-Oriented Perception
To interact with humans in the real world, social robots must perceive the world the same way that humans do
In particular, they must be able to track human features and interpret human communication
Similar perception may require similar sensing
4/12/2007 dhartman, CS296-3 12
Methodology – Human-Oriented Perception
Each of these tasks is mentioned and references papers for in depth work. People Tracking Speech Recognition Gesture Recognition Facial Perception
4/12/2007 dhartman, CS296-3 13
Topics That I Am Skipping for Time and Relevance
Dialogue Personality Emotion
User Modeling Socially Situated
Learning Intentionality
4/12/2007 dhartman, CS296-3 14
Discussion – Attitudes Towards Robots
Khan describes a survey to investigate people’s attitudes towards intelligent service robots. Two significant findings were: A robot with machine-like appearance, serious
personality, and round shape is preferred Verbal communication using a human-like voice
is highly desired.
4/12/2007 dhartman, CS296-3 15
Discussion – Field Studies Scheeff et al. conducted two studies to
observe how a range of people interact with a creature-like social robot. Children were observed to be more engaged
than adults. A friendly robot personality was reported to have
prompted qualitatively better interactionthan an angry personality.
4/12/2007 dhartman, CS296-3 16
Discussion – One Last Point for Perspective
Paraphrasing Wood,the authors say: “Humans and robots must be able to coordinate their
actions so that they interact productively with each other. It is not appropriate (or even necessary) to make the robot as socially competent as possible. Rather, it is more important that the robot be compatible with the human’s needs, that it matches application requirements; that it be understandable and believable, and that it provide the interactional support the human expects.