Embed Size (px)
Citation preview

Progress In Electromagnetics Research M, Vol. 23, 153–165, 2012
3D IMAGING METHOD FOR STEPPED FREQUENCYGROUND PENETRATING RADAR BASED ON COM-PRESSIVE SENSING
J.-L. Cai1, *, C.-M. Tong1, 2, W.-J. Zhong1, and W.-J. Ji1
1Missile Institute, Air Force Engineering University, Sanyuan, Shanxi713800, China2State Key Laboratory of Millimeter Waves, Nanjing, Jiangsu 210096,China
Abstract—Long data collecting time is one of the bottlenecks of thestepped-frequency continuous-wave ground penetrating radar (SFCW-GPR). We discuss the applicability of the Compressive Sensing (CS)method to three dimensional buried point-like targets imaging forSFCW-GPR. It is shown that the image of the sparse targets can bereconstructed by solving a constrained convex optimization problembased on l1-norm minimization with only a small number of datafrom randomly selected frequencies and antenna scan positions, whichwill reduce the data collecting time. Target localization ability,performance in noise, the effect of frequency bandwidth, and the effectof the wave travel velocity in the soil are demonstrated by simulateddata. Numerical results show that the presented CS method canreconstruct the point-like targets in the right position even with 10%additive Gaussian white noise and some wave travel velocity estimationerror.
1. INTRODUCTION
Ground Penetrating Radar (GPR) is an important remote sensingtool to detect the object buried in shallow ground and widely used insuch areas as civil engineering [1], landmine detection [2], archeologicalinvestigations [3] and environmental applications [4], etc.
Generally speaking, there are two types of GPRs most commonlyseen in literatures. One is (Carrier-Free Pulse CFP-GPR), which
Received 12 December 2011, Accepted 29 January 2012, Scheduled 8 February 2012* Corresponding author: Ji-Liang Cai ([email protected]).

154 Cai et al.
images the subsurface by transmitting short electromagnetic (EM)pulses and processing the reflections due to permittivity discontinuitiesin the ground [5]. The other is the stepped-frequency continuous-waveGPR (SFCW-GPR) [6–9]. When it works, a stepped frequency signalprobes the environment with a discrete set of frequencies. Comparedwith CFP-GPR, SFCW-GPR has several advantages, such as greatermeasurement accuracy, greater dynamic range, lower noise, easierfrequency band and frequency steps selecting [9]. Therefore, it isbecoming increasingly popular. In [6–8], SFCW-GPR is used to imageburied landmines and objects.
Although SFCW GPRs have very good properties, they are notused widely in commercial systems. One important reason for this islong data acquisition time [9]. There are tens of scan positions andhundreds of measurements at each scan position, which means largequantities of data and long measurement time and thus make it tooslow for some applications.
Compressive sensing (CS), proposed by Donoho [10], shows thatcertain signals and images, which are sparse or compressible in somedomains such as time, space and frequency, can be recovered withfar fewer samples or measurements than traditional Nyquist samplingtheorem. Due to its compressed sampling and exact reconstructionability, CS has been widely used in radar field imaging [11], suchas Ground Penetrating Radar (GPR) [9, 12], through-wall radarimaging [13], SAR [14], and ISAR imaging [15]. In recent years, CS hasreceived more and more attention in radar applications, for lighteningup sampling burden and improving the resolution of radar system.
In [12], a 3D GPR imaging method based on CS is proposed. Thetarget space is reconstructed from just a few compressive sensing dataobtained by random aperture measurements. However, it is an impulseGPR. In [9], stepped-frequency GPR based on CS is proposed, but itonly deals with 2D targets. 3D imaging is the tendency of future GPR,and SFCW-GPR has its own unique advantages as mentioned above.As far as we know, CS has not been applied to 3D SFCW-GPR imagingyet. And, in this paper, 3D imaging method for SFCW-GPR based onCS is discussed.
The paper is organized as follows. Section 2 briefly describes thetheory of compressive sensing. The compressive sensing algorithm forstepped frequency GPR and the selection of the related parametersare explained in Section 3. Section 4 presents results for the simulatedstepped frequency GPR with a performance analysis. Conclusions aredrawn in Section 5.

Progress In Electromagnetics Research M, Vol. 23, 2012 155
2. BASIS THEORY OF COMPRESSIVE SENSING
When the object signal is sparse, compressive sensing provides a veryefficient sampling method which will significantly decrease the requiredvolume of the collected data. Sparsity means that the number ofnonzero coefficients representing a signal in a certain basis is much lessthan its dimension. Considering a discrete signal vector x ∈ RN , wesay that it is K-sparse if K (K ¿ N) of its coefficients are nonzero onan orthonormal basis or over-complete dictionary Ψ ∈ CN×N . Hence,the true information is contained in x which lives at most K dimensionsrather than N . The sparse signal can be expressed as
x = Ψα (1)
where vector α ∈ RN×1 is the weighting coefficient. As the signal xhas a sparse representation in Ψ, x can be well approximated by thebest K term expression.
According to CS theory, the measured signal is acquired by linearprojections y = Φx. It makes sense that only M samples of signalx need to be measured instead of N . Then, considering a linearmeasurements matrix Φ ∈ CM×N with M < N , the measurementssignal y ∈ RM is descried as
y = Φx = ΦΨα = Θα (2)
where Θ = ΦΨ is a M × N matrix. This set of equations isunderdetermined, and (2) has infinitely many solutions. However, it isindeed possible to recover the sparse signal via CS when the matrix Φhas the Restricted Isometry Property (RIP) of order K [16].
Knowing the observed vector y and the measured matrix Θ, thesignal x can be recovered from the solution of a convex optimizationproblem based on l1 norm
min ‖α‖l st. y = Θα (3)
If noise is taken into account, the modified convex problem can bedescribed as
min λ ‖α‖l st. ‖y−Θα‖2 ≤ ε (4)
where λ is weighted coefficient, and ε bounds the amount of noise inmeasured data.
3. COMPRESSIVE SENSING FOR 3D SFCW-GPRIMAGING
In the application of GPR, when detecting the ordnances, tubes ormetal steels, these small buried targets can be viewed as many discrete

156 Cai et al.
scatter centrals. If the object zone is subdivided, these scatter centersusually take a small part of the space unite, i.e., the image to bereconstructed is sparse, and the precondition of the CS is satisfied.The proposed CS imaging method will make full use of the sparsity ofthe targets to precisely image the buried targets.
3.1. Construction of the Dictionary Matrix
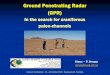
The two-layer scenario of 3D GPR imaging is shown in Fig. 1. Thetarget space πT, which lies in the product space [xixf ]× [yiyf ]× [zizf ]is discretized into a finite set of N points B= {π1, π2, . . . ,πN}. Here,(xi, yi, zi) and (xf , yf , zf ) denote the initial and final positions of thetarget space to be imaged along each axis, and each πj is a 3D vector[xj , yj , zj ]. The transmit and receive antenna pair, situated at a knownheight h from the ground/air interface, moves at the step of ∆x and∆y along x and y axes, respectively, to form a 2D measurement space.This is a more general and realistic case for 3D imaging, but it is muchharder to figure out the received signal of each antenna. As the SFCW-GPR scans a region, at each scan position, the transmitter transmitsM continuous sinusoidal signals, sequentially changing the frequenciesfrom the initial frequency f0 with frequency step ∆f .
Suppose that the medium of the ground is uniform andnondispersive, that there are P point-like targets underground,illuminated in the main lobe of the antennas, and that the multi-scattering among the targets do not happen. Then the frequencyresponse measurement at the ith scan position is:
ξi (ω) =∑P
k=1b (k) exp (−jωτi (πk)) (5)
where ω is the vector of M signal frequencies ωi = 2π (f0 + m∆f).m = 0, 1, . . . ,M − 1. τi (πk) denotes the time delay of the signal form
Figure 1. Scenario of 3D GPRimagin.
Figure 2. GPR measurementsetup of antenna pair.

Progress In Electromagnetics Research M, Vol. 23, 2012 157
the transmitter to the target πk and then reflected to the receiver atith scan position. b is a weighed indicator N × 1 vector defining thetarget space, i.e., if there is a target at πj , the value of the jth elementof b should be the reflection coefficient σj ; otherwise, it is zero. Ourgoal is to find b, which is actually an “image” of the target space.
Equation (5) can be rewrite in the following matrix form
ξi (ω) = Ψib (6)
where Ψi can be viewed as the dictionary matrix of M × N , the jthcolumn of which, [Ψi]j , corresponds to the frequency response of thetarget at πj when the GPR is at the ith scan position
[Ψi]j = exp (−jωτi (πk)) (7)
According to the ray theory view of electromagnetic wavepropagation, the transmitted signal follows the path in Fig. 2. Atthe boundary between two different media (such as air and soil), thedirection changes according to Snell’s law, but exact calculation of therefraction points requires the solution of a 4 degree polynomial. Severalapproximations are available in [17]. After finding the reflection points,the distances d1:4 can be calculated, and then the time delay τi (πk)can be calculated as follow:
τi (πk) = (d1 + d4)/v1 + (d2 + d3)/v2 (8)
where v1 and v2 are the wave propagation velocities in the air and soil.
3.2. Construction of the Measurement Matrix
Standard SFCW-GPR measures at a fixed set of M frequencies for eachscan position, Hence the dimension of ξi (ω) is M ×1. By compressivesensing sampling data acquisition method, a very small number of“random” measurements carry enough information to reconstruct theburied targets. Thus, a subset of L frequencies for each scan positionis measured. In the matrix form, the new measurements βi can bewritten as:
βi = Φiξi = ΦiΨib (9)
where Φi is a L × M measurement matrix constructed by randomlyselecting L rows of an M ×M identity matrix. This reduces the dataacquisition time by L/M .
For each scan position, the measurement matrix may be differentor keep the same. In [13], it is proved by simulation that they are thesame for the through-wall radar imaging, but the latter is easier forhardware implementation.

158 Cai et al.
3.3. Compressive 3D SFCW-GPR Imaging
As mentioned above, SFCW-GPR needs measurements at differentscan positions. For 3D imaging, the transmitter and receiver antennapair moves along x and y axes to form a 2D grid measurementspace. By the compressive sensing imaging method, we justrandomly select K scan positions to form a composite dictionarymatrix Ψ = [ΨT
1 ,ΨT2 , . . . ,ΨT
K ]T composite measurement matrixΦ = diag{Φ1,Φ2, . . . ,ΦK} and the measurement vector β =[βT
1 , βT2 , . . . ,βT
K]T . Then the recovery of b is done by solving aconstrained l1 minimization problem
b̂ = argmin ‖b‖l1s.t. β = ΦΨb (10)
The equality constraints in above equation are only valid for thenoiseless case. Generally, the data are always contaminated by thenoise in real measurements. Then constraints are as follow
β = ΦΨb + n (11)
where n is the noise vector, following a normal distribution with meanzero and standard deviation σ2, i.e., n ∼ N (0, σ2). The reconstructionof the image b̂ is by solving a modified convex optimization problem,called Dantzig Selector [18].
b̂ = argmin ‖b‖l1s.t.
∥∥AT(β − Ab)∥∥
∞ < ε (12)
where A = ΦΨ, ε is the amount of noise in measured data. Thechoice of ε is noise dependent, and selection ε =
√2σ2 log(KL) makes
the true b̂ feasible with high probability [18].
4. SIMULATION RESULTS
In this section, several simulated data results for CS method arepresented. It should be mentioned that this paper is mainly focusedon CS imaging, aimed at saving data processing time by sampling lessdata. Before using CS, some data preprocessing methods in [7, 19–21]can be used to remove the ground reflecting effects.
First, to illustrate the random frequency sampling and randomantenna position selection idea, a 3D homogenous target space ofsize 10 cm× 10 cm× 8 cm containing three randomly placed point liketargets (suppose P1(8, 5, 6), P2(5, 6, 3) and P3(5, 8, 4)) with reflectioncoefficients 1.0, 0.6 and 0.8 respectively are considered. The targetspace is discredited into 10 × 10 × 8 points. Bistatic antenna pairswith a 2 cm transmitter-receiver spacing at the height of 10 cm collectfrequency domain measurements at frequencies from 100 MHz to

Progress In Electromagnetics Research M, Vol. 23, 2012 159
10GHz with 100 MHz frequency step. Thus, at each scan position,100 frequency measurements are collected. The antenna pair moveswith the step of ∆x = ∆y = 1 cm along x and y axes, respectively, inthe measurement space with the size of 15 cm × 15 cm. So there aretotally 225 positions. The permittivity of the soil εr is supposed to be4, i.e., the signal transmitting velocity in the soil v2 = v1/
√εr = 0.5v1.
For the numerical solution of the l1-norm minimization problems in
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
antnna
frquncy(1
00M
Hz)
50 100 150 200
10
20
30
40
50
60
70
80
90
1000.20.40.60.811.21.41.61.822.2
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-12
-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-12
-10
-8
-6
-4
-2
0
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8 -10
-9
-8
-7
-6
-5
-4
-3
-2
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
0
x (cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
P y=51 P y=62 P y=83
P y=51 P y=62 P y=83
Figure 3. (a) DSBF data acquisition. (b) CS data acquisition wherethe black points indicates the randomly sampled data when about 7%of the total measurements are used. (c) Noiseless space-frequencydomain target response for all the frequency and antenna positions.(d)–(f) DBSF imaging with the full set of data for P1, P2, P3 at y = 5,6, 8 respectively. (g)–(i) CS imaging with randomly selected subset ofdata for P1, P2, P3 at y = 5, 6, 8 respectively.

160 Cai et al.
CS, a convex optimization package called CVX [22] is used. All thesimulations are done on a computer with 1.6 GHz Pentium 4 processorand 1G memory.
For the CS method, we use the measurement strategy proposedin [13], which is easy for hardware implementation, i.e., instead ofmeasuring all 100 frequencies at all 225 scan positions, a random subsetof 50 positions is firstly selected, and then for each position, the samerandom subset of 30 frequencies is measured. To make a comparison,the conventional delay-and-sum beam forming (DSBF) algorithm [13],which performs coherent summation of full 100 × 225 sensor data, isused. The target space slice images at y = 5, 6, 8 in Figs. 3(d)–(f)and (g)–(i), the noiseless full space-frequency domain measured data inFig. 3(a), and the randomly selected space-frequency domain measureddata in Fig. 3(b) are shown respectively. It can be seen that whenapplying CS, much less data are used.
For the DSBF imaging in Figs. 3(d)–(f), it can be seen thatthe three targets can be seen clearly with small “blobs” in the right
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-12
-11
-10
-9
-8
-7
-6
-5
-4
-3
-2
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-12
-10
-8
-6
-4
-2
0
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8 -10
-9
-8
-7
-6
-5
-4
-3
-2
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
0
x(cm)
z(c
m)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
(a) (b) (c)P y=51 P y=62 P y=83
(d) (e) (f)P y=51 P y=62 P y=83
Figure 4. Imaging with 10% additive Gaussian white noise. (a)–(c)DBSF imaging with the full set of data for P1, P2, P3 at y = 5, 6,8 respectively. (d)–(f) CS imaging with randomly selected subset ofdata for P1, P2, P3 at y = 5, 6, 8 respectively.

Progress In Electromagnetics Research M, Vol. 23, 2012 161
position, but for Fig. 3(d), a false point-like target at (5, 5, 2) is alsoimaged. As seen in Figs. 3(g)–(h), while using a much small subset ofdata, the CS method can recover the targets with much less clutteredimage, which is better than DSBF method using the full data set.
Note that in real applications, the measured data are alwayscontaminated with noise. Next, the performance of the algorithm withnoise is disused.
4.1. Performance in Noise
To analyze the impact of noise data on the imaging, 10% Gaussianwhite noise is added to the signal reflected by the above three point-liketargets. All other parameters are kept the same with above experiment.The images are shown in Fig. 4.
From the simulation result shown in Fig. 4, with the additivesnoise, though there is a subtle change for DSBF images the clutters andfalse targets still exist. Whereas, for the CS method, there are somechanges, more clusters appear, but except the targets, the values of the
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
(d) (e) (f)P y=51 P y=62 P y=83
(a) (b) (c)P y=51 P y=62 P y=83
Figure 5. CS imaging with different bandwidth. (a)–(c) CS imagingwith bandwidth of 2 [1–3]GHz for P1, P2, P3 at y = 5, 6, 8 respectively.(d)–(f) CS imaging with bandwidth of 5 [0.5–5.5]GHz for P1, P2, P3
at y = 5, 6, 8 respectively.

162 Cai et al.
pixels are all less than 15 dB which can be viewed as the background,i.e., the targets are all at the right position, and no false targets appear.
4.2. Effect of Bandwidth
The bandwidth of the measured frequency spectrum is an importantparameter in the SFCWGPR. To analyze the effect of frequencybandwidth on the imaging, in this subsection, different bandwidthsof 2 GHz and 5 GHz are tested for the above three point-like targets.In the simulation, 10% noise is added. The images are shown in Fig. 5.
It can be observed in Fig. 5 that the CS method is able toreconstruct the true target points even for the low bandwidth of 2 GHz.Besides, with smaller bandwidth, the number of “false target points”becomes smaller, but with stronger intensity.
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
x (cm)
z (
cm
)
2 4 6 8 10
1
2
3
4
5
6
7
8-30
-25
-20
-15
-10
-5
(d) (e) (f)P y=51 P y=62 P y=83
(a) (b) (c)P y=51 P y=62 P y=83
Figure 6. CS imaging with different wave travel velocity in soil and10% additive Gaussian white noise. The true wave travel velocityin soil is v = 1.5 × 108 m/s. (a)–(c) Wave travel velocity in soilv = 1.7321× 108 m/s for P1, P2, P3 at y = 5, 6, 8 respectively. (d)–(f)wave travel velocity in soil v = 1.3416 × 108 m/s for P1, P2, P3 aty = 5, 6, 8 respectively.

Progress In Electromagnetics Research M, Vol. 23, 2012 163
4.3. Effect of the Wave Travel Velocity Estimation Error
In above simulations, we view the wave travel velocity in soil as a knownparameter. However, in most of the real applications, it is unknownor has a measurement error from the true value, which will directlyaffect the imaging. In this subsection, the effect of the wave travelvelocity estimation error is discussed. The true velocity is 15×108m/s(εr = 4). In the simulation, the measured data are sampled usingthe true velocity, and the dictionary matrix is calculated using theestimated velocity of 1.7321 × 108 m/s (εr = 3) and 1.3416 × 108m/s(εr = 5), respectively. The other parameters are kept the same in thesecond simulation. The images are shown in Fig. 6.
Figure 6 shows that even if the wave travel velocity in soil iswrongly estimated to some extent, the targets can still be correctlyimaged by the CS method, because in spite of certain differencebetween the dictionary matrix constructed by the true velocity andthe one constructed by the estimated velocity, CS is based on the l1norm optimization. By solving the convex optimization, the true imagecan be reconstructed.
5. CONCLUSION
This work deals with the imaging of the three dimensional buried point-like targets based on the compressive sensing method. By solving theconstrained convex optimization problem, the targets can be recoveredwith much less sampled data, which will save the data collecting time.Even with 10% additive noise, smaller bandwidth and some wave travelvelocity estimation error, the image of the targets can be reconstructedwith little degradation. Further work will be exerted on the applicationof CS to small 3D block-like targets imaging of SFCWGPR.
ACKNOWLEDGMENT
This work was supported by the National Key Laboratory of MillimeterWaves at Southeast University in China (No. K20121) and the NaturalScience Foundation of Shanxi Province, China (No. 2011JM8025).
REFERENCES
1. Grandjean, G., J. Gourry, and A. Bitri, “Evaluation of GPRtechniques for civil-engineering applications: Study on a test site,”J. Appl. Geophys., Vol. 45, No. 3, 141–156, 2000.

164 Cai et al.
2. Feng, X. and M. Sato, “Pre-stack migration applied to GPR forlandmine detection,” Inverse Prob., Vol. 20, 99–115, 2004.
3. Groenenboom, J. and A. Yarovoy, “Data processing and imagingin GPR system dedicated for landmine detection,” Subsurf. Sens.Technol. Appl., Vol. 3, No. 4, 387–402, 2002.
4. Hubbard, S., C. Jinsong, K. Williams, Y. Rubin, and J. Peterson,“Environmental and agricultural applications of GPR,” Proc. 3rdInt. Workshop on Adv. Ground Penetrating Radar, 45–49, 2005.
5. Daniels, D., Ground Penetrating Radar, 2nd edition, London, UK,2004.
6. Counts, T., A. C. Gurbuz, W. R. Scott, Jr., J. H. McClellan,and K. Kangwook, “Multistatic ground-penetrating radar experi-ments,” IEEE Trans. Geosci. Remote Sens., Vol. 45, No. 8, 2544–2553, Aug. 2007.
7. Lopera, O., E. C. Slob, N. Milisavljevic, and S. Lambot, “Filteringsoil surface and antenna effects from GPR data to enhancelandmine detection,” IEEE Trans. Geosci. Remote Sens., Vol. 45,No. 3, 707–717, 2007.
8. Fang, G.-Y. and M. Sato, “Stepped frequency ground penetratingradar and its application for landmine detection,” Acta ElectronicaSinica, Vol. 33, No. 3, 436–439, 2005.
9. Gurbuz, A. C., J. H. McClellan, and W. R. Scott, “A compressivesensing data acquisition and imaging method for steppedfrequency GPRs,” IEEE Transactions on Signal Processing,Vol. 57, No. 7, 2640–2650, 2009.
10. Donoho, D. L., “Compressive sensing,” IEEE Trans. onInformation. Theory, Vol. 52, No. 4, 1289–1306, 2006.
11. Baraniuk, R. and P. Steeghs, “Compressive radar imaging,” Proc.IEEE Radar Conf., 128–133, 2007.
12. Yu. H.-M. and Y. Fang, “Research on compressive sensing based3D imaging method applied to ground penetrating radar,” Journalof Electronics & Information Technology, Vol. 32, No. 1, 12–16,2010.
13. Huang, Q., L. Qu, B. Wu, and G. Fang, “UWB through-wallimaging based on compressive sensing,” IEEE Trans. Geosci.Remote Sens., Vol. 48, No. 3, 1408–1415, 2010.
14. Wei, S.-J., X.-L. Zhang, J. Shi, and G. Xiang, “Sparsereconstruction for SAR imaging based on compressed sensing,”Progress In Electromagnetics Research, Vol. 109, 63–81, 2010.
15. Zhang, L., M. Xing, C. Qiu, et al., “Achieving higher resolutionISAR imaging with limited pulses via compressed sampling,”

Progress In Electromagnetics Research M, Vol. 23, 2012 165
IEEE Geoscience and Remote Sensing Letters, Vol. 6, No. 3, 567–571, 2009.
16. Candes, E. J. and M. Wakin, “An introduction to compressivesampling,” IEEE Signal Processing Magazine, 2130, Mar. 2008.
17. Johansson, E. M. and J. E. Mast, “Three dimensional groundpenetrating radar imaging using a synthetic aperture time-domainfocusing,” Proc. SPIE Conf. Adv. Microw. Millimeter WaveDetectors, Vol. 2275, 205–214, 1994.
18. Candes, E. and T. Tao, “The Dantzig selector: Statisticalestimation when p is much larger than n,” Ann. Statist., Vol. 35,No. 6, 2313–2351, 2007.
19. Tuncer, M. A. C. and A. C. Gurbuz, “Ground reflection removal incompressive sensing ground penetrating radars,” IEEE Geoscienceand Remote Sensing Letters, 2011.
20. Picardi, M., “Background subtraction techniques — A review,”Proc. IEEE Int. Conf. Syst. Man. Cybern., 3099–3104, Oct. 10–13, 2004.
21. Mayordomo, A. M. and A. Yarovoy, “Optimal backgroundsubtraction in GPR for humanitarian demining,” Proc. 5th Eur.Radar Conf., 48–51, Oct. 2008.
22. Grant, M. and S. Boyd, CVX: Matlab Software for DisciplinedConvex Programming (Web Page and Software), 2011, Available:http://stanford.edu/ boyd/cvx.