Embed Size (px)
Citation preview

3D CROSS-SECTIONAL SHAPE MEASUREMENT OF THE FOOT WHILE WALKING
Makoto Kimura1,2
, Masaaki Mochimaru1,2
, Makiko Kouchi1,2
, Hideo Saito3, Takeo Kanade
1,2,4
1 Digital Human Research Center, National Institute of Advanced Industrial Science and Technology
2 CREST, Japan Science and Technology Agency
3 Department of Information and Computer Science, Keio University
4 The Robotics Institute, Carnegie Mellon University
INTRODUCTION
There are many 3D body scanner systems. However, there is no system that can measure 3D human
body shape in motion. Using techniques of computer vision, we have developed a system that can
capture foot shape during walking. In this paper, we present the principle and algorithms of our
measurement system and the measured data of feature cross-sections of the foot during walking.
PRINCIPLE
Most of the existing 3D shape measurement systems use laser scanning[2], and requires a time (several
seconds, typically) for measurement. The principle of laser scanning measurement is triangulation
between camera and laser projector.
In the field of computer vision, 3D shape of the target object is reconstructed from multiple images
using triangulation between multiple cameras (stereo matching)[1]. Theoretically, this method can
measure an object as accurate as the laser scanning. Actually, it could not because of difficulties in pre-
process calibration and in finding accurate matching points in multiple images
PROPOSED SYSTEM
Our system uses eight sets of IEEE1394 camera and PC. All cameras see a common 3D area, which is
about 15cm cube. The arrangement of all cameras is heuristically optimized for our purpose. The
cameras are triggered with 70 msec intervals, so that they can capture completely synchronized
1024x768 color images. All cameras are calibrated by Tsai’s method[3] with additional improvement.
As a first goal, we intend to measure the 3-Dimensional transformation of three feature cross-sections
(ball, instep, and heel) during walking. The target cross-sections are painted with individual color (red,
yellow, and blue) before capturing. First, the painted regions are detected in each 2D image by using
image processing technique. Next, center line of each colored region is estimated. Finally, stereo
matching method is applied to each pixel on these center lines in the images. Our stereo matching
process uses some weak restriction, which assumes that the target is a cross-section of the foot.
Additionally, we process stereo matching in sub-pixel order to improve the accuracy. In our experiments,
the accuracy of camera calibration was less than 1mm. The output of our system includes some obvious
outliers, and the experimental maximum error of inliers was about 1mm.
EXPERIMENTS
We measured four subjects (two males and two females) in the walking motion. Three cross-sections
were painted on the right foot, and two landmarks were marked on each cross-section. Cross-sections at
different frame were superimposed using these marks. Four measurements were taken for each frame. In
our experiments, changes in the cross-section shape and dimensions were similar for all the subjects.
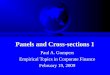
Figure 1 shows an example of experimental results. The breadths of feature cross-sections and arch

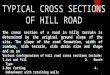
lengths change during the walking motion. Figure 2 shows the shape changes in ball, instep, and heel
cross-sections.
Patterns of the change of the medial arch length and ball breadth are similar to those measured by an
electric arch gauge[4]. Each cross-section seems to remain on a plane most of the stance phase. Shapes of
ball and heel cross-sections change due to the tendons appearing when the joint flexes.
Frame #12 Frame #15 Frame #18
DISCUSSIONS AND FUTURE WORK
We constructed a 3D measurement system for foot while walking. Because it still remains a little noise
and un-robustness - the error in detection of colored region and failure of finding matching points-, it
still needs more improvement. In the current system, we can capture only upper side of foot. In our plan,
the sole of foot will be acquired using glass floor. These are our future work.
REFERENCES
[1] D.H. Ballard, et al, (1982) “Computer Vision”, ISBN 0–13–165316–4, Prentice-Hall, INC.
[2] M. Kouchi and M. Mochimaru, (2001). “Development of a low cost foot-scanner for a custom shoe making system”, 5th
ISB Footwear Biomechanics, pp. 58–59., Zurich, Switzerland.
[3] R.Y. Tsai, (1987) “A versatile Camera Calibration Technique for High-Accuracy 3D Machine Vision Metrology Using
Off-the-Shelf TV Cameras and Lenses”, IEEE Journal of Robotics and Automation, Vol. RA-3, No. 4, pp. 323–344.
[4] S.M. Yang et al. (1985) Dynamic changes of the arches of the foot during walking. Biomechanics IX-A:417-422.
Figure1: The breadth of feature cross-sections and length between cross-
sections change through walking.
Figure2: The shapes of feature cross-
sections projected onto the optimal
plane. Registration between frames is
done by landmark’s geometry.
Frame #12
Frame #15
Frame #18
MT
MH
Medial Lateral
MI