Embed Size (px)
Citation preview

3444 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
Estimation of Direction of Arrival UsingMultipath on Array Platforms
Marija M. Nikolic, Arye Nehorai, Fellow, IEEE, and Antonije R. Djordjevic
Abstract—We demonstrate that the utilization of the diffractionby antenna platforms increases the effective array aperture. Weconduct the analysis on a realistic model of an airborne platformand use the Cramer–Rao bound to assess the level of improvementdue to the presence of the platform. We show that the exploitationof the multipath enables us to resolve both azimuth and elevationwith uniform linear arrays at single-frequency measurements. Byusing a uniform linear array of monopoles mounted on a metallicplate, we verify the results experimentally.
Index Terms—Antenna arrays, antenna platforms, DOA estima-tion, multipath.
I. INTRODUCTION
T HE auditory systems of humans and other animals per-form 3-D direction using the diffraction of sound waves
in the head [1]. We examine whether the diffraction of electro-magnetic waves in antenna platforms can be exploited in the es-timation of directions of arrival (DOA). Preliminary studies in[2] proved that placing ideal reflectors near an isotropic sensorlowers the variance of DOA estimates. We generalize the workin [3], which concerns the DOA estimation of a known signalin the presence of a platform. We consider a realistic exampleof an airborne platform, the Unmanned Aerial Vehicle (UAV)Predator, and show that exploiting the multipath allows the es-timation of both the azimuth and the elevation of multiple un-known incident signals. This estimation would otherwise be im-possible with uniform linear arrays.The multipath due to the antenna platforms is not commonly
used in electromagnetic sensing; however, there is great interestin potential utilization of the multipath from the target’s sur-roundings, e.g., [4]–[10]. Nevertheless, we suggest employingthe multipath from the antenna platform because it has a signifi-cant advantage over the multipath from the target surroundings;the platform response is known and invariant, whereas the targetenvironment is only partially known and varies.Examples of utilization of the multipath from the objects
close to targets include the following. In [4]–[9], reflections
Manuscript received May 12, 2011; revised December 21, 2011; acceptedJanuary 31, 2012. Date of publication April 30, 2012; date of current versionJuly 02, 2012. This work was supported in part by the Department of Defenseunder the Air Force Office of Scientific Research ONR Grant N000140810849and in part by the Serbian Ministry of Education and Science under GrantTR32005.M. M. Nikolic and A. R. Djordjevic are with the School of Electrical Engi-
neering, University of Belgrade, Serbia (e-mail: [email protected]; [email protected]).A. Nehorai is with the Preston M. Green Department of Electrical and Sys-
tems Engineering, Washington University, St. Louis, MO 63130 USA (e-mail:[email protected]).Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.Digital Object Identifier 10.1109/TAP.2012.2196926
from land or buildings are taken into account to improve sourcelocalization. The phenomenon of “super-resolution” in a com-plex propagation medium using phase conjugation (PC) wasstudied in [11]. The same phenomena was studied using timereversal (TR) in [12]–[14]. In [15], it was demonstrated that thenumber of measurements needed to infer the radiation patternof a 2-D current source is reduced if the source is situatedbetween two parallel plates instead of in a free space. Similarexploitation of propagation complexity and multipath has beenused in telecommunications, such as in [16].A substantial body of previous work considered the perfor-
mance of antenna arrays in the presence of mounting structures.These efforts typically had one of two goals: reduction of theinteraction between the array and the platform or the optimiza-tion of the array pattern in the presence of the platform. In thefirst case, [17]–[19], the maximum field level in the array’s sur-roundings is controlled by imposing the constraint that the elec-tric field be zero for a suitable set of points. In the second case,algorithms are designed (e.g., [20]–[23]) so that the influence ofthe platform is taken into account in pattern synthesis and direc-tivity optimization. Moreover, the results in [20]–[23] demon-strate that high-performance radiation patterns can be achievedby taking into account the presence of mounting platforms.Unlike previous work which focused on beamshaping in the
presence of the platform, the present work aims to demonstratethe positive impact of the platform on DOA estimation. Westudy the effects of the multipath in the framework of statis-tical signal processing and use the Cramer–Rao bound (CRB)to compute the theoretical resolution of the system. To deter-mine the empirical resolution of the system, we use the max-imum likelihood (ML) [24] and the minimum description length(MDL) [25]. By considering the case of DOA estimation usinga linear array mounted on a square metallic plate, we verify theproposed approach experimentally.Numerical computation of the stochastic CRB for onboard
arrays was studied in [26]. However, the mutual interaction be-tween the platform and the array was treated as a disturbance,rather than a tool for improving the array’s direction finding ca-pabilities. The CRB was also used in [27] to determine the res-olution of DOA estimation in MIMO channels and in [28] tostudy the performance of real-life polarimetric arrays.To provide physical insight into the multipath’s influence on
the effective array aperture, we show that the performance ofarrays on platforms is similar to that of arrays with parasiticelements [29]–[33].The outline of the paper is as follows. We formulate the
problem in Section II and detail the electromagnetic modelingto be used. In Section III we explain the signal processingmodels based on the Cramer–Rao bound and maximum like-lihood estimation. In Section IV we demonstrate the conceptof multipath exploitation on the example of the UAV Predator,
0018-926X/$31.00 © 2012 IEEE

NIKOLIC et al.: ESTIMATION OF DIRECTION OF ARRIVAL USING MULTIPATH ON ARRAY PLATFORMS 3445
and in Section V we describe the experiment. Finally, in theConclusion we discuss the results.
II. MULTIPATH FROM SENSOR PLATFORM
A. Problem Formulation
We assume that plane-wave signals impinge on an antennaarray mounted on a platform. The output of the array elementlocated at is given as in [34]
(1)
(2)
(3)
(4)
where is the effective length of the antenna (sensor) thatencompasses mutual coupling, reflections, and diffractions onthe platform; is the zenith angle ( -elevation) of the thsignal; is the azimuth of the th signal, andare the complex magnitudes of the signal at the operatingfrequency that are associated with the and components ofthe incident electric field, respectively; is the unit vectorin the direction of the propagation of the th signal; and theoperator T stands for transpose. Finally, is thepropagation coefficient, is the operating frequency, is thespeed of light, and is the complex additive white Gaussiannoise (CAWGN) of unknown variance .We consider linearly polarized arrays. Without loss of gener-
ality, we assume that is the co-polar component of the arrayresponse and is the cross-polar component. The locations ofthe sensors in the array are given by . Theinduced voltage in the th sensor is
(5)
(6)
where is the th frequency and the subscript in (6) standsfor either or . We put the array output in compact form
(7)
(8)
(9)
where is the stacked measurement vector. Further
(10)
where is the measurement matrix; and and are thesubmatrices associated with the co-polar and cross-polar arrayresponse, respectively. and are block-diagonal matriceswhere each block corresponds to one frequency [see (11)–(13),shown at the bottom of the page], where blkdiag denotes theblock-diagonal matrix and again denotes either or .The samples of the complex magnitudes in the frequency do-
main are stacked in the vector defined by
(14)
(15)
(16)
where vectors and are associated with the and compo-nents of the impinging fields, and the noise vector is defined by
(17)
(18)
The goal of the estimation is to compute the unknown anglesand . The signal coeffi-
cients and the noise variance are also unknown, but theyare considered to be nuisance parameters.The array response depends only on the electromag-
netic characteristics of the array and the platform; hence, it isknown. Finally, we consider the cases when the number of inci-dent waves is known and when it is unknown.
B. Electromagnetic Modeling
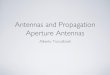
Herein we consider a realistic airborne platform (Predator),shown in Fig. 1. The Predator is a medium-altitude, unmannedaerial vehicle system. The airplane is 8.1 m long with a 14.8 mwingspan. We assume that a uniform linear array of monopolesis mounted on the Predator. The position of the array and the
(11)
(12)
(13)

3446 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
Fig. 1. Geometrical model of the Predator with the adopted coordinate system.On the bottom of the Predator, there is a uniform linear array of monopoles.
adopted coordinate system are depicted in Fig. 1. For compar-ison, we also consider a uniform linear array of L-monopolesbecause their radiation pattern does not have zero towards the-axis. We study the passive case; i.e., all antennas in the arraywork as receivers. The antennas receive both direct signals andsignals diffracted from the UAV chassis. Due to the nondihedralshape of the platform, the signals reflected from the platform donot reach the antennas. The main sources of diffraction are thewings, tail, and wedges at the bottom of the aircraft. For compar-ison, we also consider the scenario without the multipath. Thesedata are obtained when the arrays are placed on an infinite planemade of a perfect electric conductor (PEC).The arrays take the measurements in the frequency domain.
We compute the electromagnetic response of the array on theUAV [35] using the full-wave electromagnetic solver WIPL-DPro [36]. We assume that the Predator is perfectly conducting.We adopt the central frequency of the computations to beGHz. The height of the monopoles is 80 mm, the radius of
the monopoles is 1.2 mm, and the distance between adjacentmonopoles is 0.15 m. The total length of the L-monopoles andwire radius are the same as in the case of standard monopoles.The arm-length is 70 mm and the height is 10 mm.In general, the responses of the arrays should be modified to
include the Doppler effect. However, the maximal speed of theUAV Predator is about 60 m/s, yielding a Doppler shift of 0.2kHz at 1 GHz, which is insignificant in the considered frequencyrange.
III. SIGNAL PROCESSING
A. Cramer–Rao Bound
We compute the Cramer–Rao bound (CRB) on the variancesof the spherical angles of the incident signals to demonstrate theestimation improvement due to the multipath. The covariancematrix of any unknown parameter vector is lower-bounded bythe CRB and it is attainable by statistically efficient unbiasedestimators. For large data records, ML achieves asymptoticallythe CRB. The CRB is obtained from the Fisher information ma-trix, which for the measurement model (7) reads as follows [37]:
(19)
where is the Fisher information matrix, is the covariancematrix of the measurements, is the vector of the unknownparameters, is the real part of is the imaginary part of, tr denotes the trace operator, the superscript H denotes theconjugate transpose, Re denotes the real part, and dim denotesthe dimension of a vector.We consider deterministic signals; hence, is the covariance
matrix of the noise. In our case, , where isthe identity matrix of size . The Fisher information matrixis given by
(20)
(21)
where is the vector of the unknown parameters apart from .The CRB matrix is the inverse of the Fisher information matrix
(22)
The elements on the main diagonal of the CRB matrix containthe theoretical, lower bound on the parameter variances. Due tothe block diagonal nature of the Fisher matrix (20), the CRB forthe parameter vector is the same when is known and whenit is unknown.The derivatives with respect to the spherical angles of the th
wave are computed as
(23)
(24)
(25)
where both and stand for either or , and
(26)
is the vector containing the complex magnitudes of the co-polaror cross-polar component of the th signal at the frequencies
. Finally
(27)

NIKOLIC et al.: ESTIMATION OF DIRECTION OF ARRIVAL USING MULTIPATH ON ARRAY PLATFORMS 3447
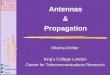
Fig. 2. Ratio of cross-polar and co-polar components of the radiation patternof a sensor mounted on the UAV computed using WIPL-D Pro at 1 GHz.
Since there are no closed-form expressions for the derivativesin (25), we resort to numerical differentiation. To obtain numeri-cally stable results, we first use polynomials to approximate theexpressions for the effective length with respect to the spher-ical angles [38]. Then, we compute analytical derivatives of thepolynomial approximation [38].
B. DOA Estimation
We estimate the unknown parameters using the ML approach[24] when the number of waves is known. Otherwise, we usethe minimum description length (MDL) [25].We also consider another application of the MDL for model-
selection. In Fig. 2, we show the ratio of the co-polar and cross-polar components of the radiated electric field at 1 GHz for oneof the sensors in the array on the platform. For many incidentangles, the cross polarization is negligible (below 10 dB). How-ever, there are also directions of arrival for which the cross-polarand co-polar components of the array response are comparable.Including the cross-polarized component of the received signalin the measurement model, in the case when it is actually in-significant, may cause erroneous estimation due to “over-fit-ting” the data. Similarly, ignoring the cross-polarization in thecases when it is truly pronounced will deteriorate the estima-tion [39]. Hence, we need a tool to decide whether to include thecross-polarization in the model. The decision, made for each in-cident signal, depends on the signal polarization and the DOA.It is well known that ML is not suitable for model selection
problems. ML gives favor to more complex models, which maylead to overfitting. In contrast, from a set of candidate models,MDL selects a model that balances between the data fidelity andcompactness of the representation.The submatrix contains the cross-polarization compo-
nents of the antennas in the array. As defined in (10)–(13), isa block-diagonal matrix where each block is associated with onefrequency. Within each block, each column is the cross-polarresponse of the array to one particular wave. For each inci-dent wave, we decide whether to take into account the cross-polarization. Assuming there is at least one wave present, thetotal number of hypotheses for incident waves is
. If , we have six hypotheses:one co-polarized wave; one fully polarized wave (electric fieldhas both co-polar and cross-polar components); two co-polar-ized waves; two fully polarized waves; two waves with the first
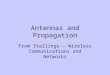
Fig. 3. CRB for the MSAE computed for a uniform linear array of sevenmonopoles mounted on the (a) Predator and (b) PEC using frequencysample. The adopted SNR is 15 dB.
being co-polarized and the second being fully polarized; andtwo waves with the first being fully polarized and the secondbeing co-polarized.We select the hypothesis for which theMDLcriterion is minimized [25]
(28)
where is the MDL criterion for hypothesis isthe measurement matrix of hypothesis is the vector ofunknown complex coefficients of hypothesis is the MLestimate of , and denotes the Euclidian norm. In theconsidered hypothesis, where is ob-tained by eliminating the columns from that correspondto the waves for which we neglect the cross-polarization. Thesecond term in (28) penalizes long representations of data, i.e.,the inclusion of a large number of incident waves or addition ofcross-polarization in the model. The ML solution for the com-plex amplitudes is
(29)
We perform a simplex optimization [40] to compute the angleestimates from the concentrated likelihood
(30)

3448 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
Fig. 4. CRB for the MSAE computed for a uniform linear array of sevenmonopoles mounted on the (a) Predator and (b) PEC using frequencysamples. The adopted SNR is 15 dB.
where is the estimated DOA associated with hypoth-esis .
IV. UAV EXAMPLE
We study the DOA estimation of completely unknownplane-wave signals incident on the Predator. The arraytakes uniform measurements in the frequency domain:
for , whereGHz is the central frequency and MHz is
the frequency step. In order to generate the synthetic data, wedraw the frequency samples of the incident waveforms as inde-pendent, identically distributed (i.i.d.) samples of the complexnormal distribution:
.
A. Single Source
We first assume there is only one incident wave and computethe angular error between the unknown source directionand its estimate . For small angular errors, is given by
(31)
where and are the angular errors in and , respectively.The asymptotic mean-square angular error (MSAE) of a DOAestimator is defined [41] as
(32)
Fig. 5. CRB for the MSAE computed for a uniform linear array of sevenL-monopoles mounted on the Predator using (a) and (b)frequency samples. The adopted SNR is 15 dB.
where stands for the expectation. The CRB for the MSAE,asymptotically attainable by ML, is [41]
(33)
Fig. 3(a) shows the CRB on theMSAE computed for the arrayof monopoles on the UAV and Fig. 3(b) shows the computationfor the same array on the PEC. Here, dB and .(We define SNR as the ratio of the average power received bythe array and the noise power.) The lower bound on the MSAEfor the array on the UAV is reasonably small. Hence, becauseof the multipath, the linear array on the UAV is able to estimateseparately both spherical angles using single-frequency data. Ifthere is no multipath, CRB grows extremely large, confirmingthat the uniform linear array is not capable of resolving bothazimuth and elevation of the incident wave. (The CRB is notinfinite for the array on the PEC due to the coupling betweenthe sensors.)Fig. 4 shows the lower bound on the MSAE computed for
the same array using frequency samples. In the case ofthe array on the UAV, the frequency-swept measurements im-proved the estimation accuracy. In the case without the multi-path, the improvement was negligible. The response of the an-tennas varies with the frequency. This variation is not the same

NIKOLIC et al.: ESTIMATION OF DIRECTION OF ARRIVAL USING MULTIPATH ON ARRAY PLATFORMS 3449
Fig. 6. Square root of the MSAE for (a) and (c) . The resultsare obtained by 200 independent MC simulations with dB.
for all directions, particularly for antennas in complex environ-ments such as platforms. When the number of frequency sam-ples is increased, the CRB decreases because new pieces of in-formation are added.However, this decrease is not the same for all DOAs because
the response of the array on the UAV changes with both theDOA and frequency. In contrast, the radiation pattern of thearray on the PEC changes with the frequency in almost the sameway for all directions. (The coupling among antennas is the onlysource of this spatial variation.) Hence, in this case, the CRBalmost uniformly decreases for all DOAs with increased fre-quency samples.We also study the effect of the multipath on the DOA estima-
tion using the uniform linear array of L-monopoles. The radia-tion pattern of L-monopoles does not exhibit zero towards theground ( -axis) if mounted on the bottom of the UAV. The re-sults are shown in Fig. 5. As in previous case, the exploitationof the multipath allows estimation of both spherical angles.By performing anML estimation of the unknown parameters,
we further investigate the influence of the multipath. We com-pare twomeasurement models for the array of monopoles on theUAV: (a) a model that takes into account both the co-polar andthe cross-polar components of the array response (full model)and (b) a model that neglects the cross-polarization (co-polarmodel). The measurement matrix for the full model is givenby (10), and the measurement matrix for the co-polar is alsodefined in (10). In deciding between these two models, we useMDL (28). We compute the MSAE numerically by means ofMonte Carlo (MC) simulations, assuming frequencymeasurements with dB. Fig. 6, presents the resultsobtained by 200 independent numerical experiments. When the
Fig. 7. Square root of the CRB for the MSAE of the first wave as a functionof its DOA. The DOA of the second wave is .The computations are performed for the array of monopoles on the UAV with
dB and .
Fig. 8. Resolution of the array of monopoles on the UAV computed by CRBand MDL with dB and .
Fig. 9. Receiving array on the plate and the adopted coordinate system.
cross-polar component of the received signal is insignificant, theco-polar model (white circles) yields smaller MSAE than thefull model (red squares). This situation is illustrated in Fig. 6(a)for . Otherwise, the full model performs better.
B. Two Sources
We now study the capability of the system with multipath toresolve two sources with closely spaced angles of arrival. In thiscase, we define SNR as the ratio of the average received powerfrom one of the sources and the noise power. The signals haveequal power.We first consider the scenario in which the number of the sig-
nals is known in advance and compute the theoreticalresolution by means of the CRB. In this approach, two signalsare said to be resolvable in some parameter (e.g.,frequency or angle) if
(34)

3450 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
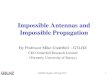
Fig. 10. Experimental verification of the 3-D localization using a uniform linear array of monopoles with the aid of diffraction. The signal spectrum for DOAwas computed at (a) 0.75 GHz, (b) 1 GHz, (c) 1.5 GHz, and (d) 2 GHz. The estimation accuracy was better at higher frequencies.
where and are the parameter values corresponding to thefirst and second signal, respectively; and and are theirrespective standard deviations, typically determined by the CRB[42]. Since both spherical angles of each signal are unknown, wedefine the angular resolution as
(35)
where and are the respective DOAs of the firstand the second wave, and the and arethe respective Cramer–Rao bounds on theMSAE of the first andthe secondwave.We determine these bounds assuming that bothwaves are present.
By performing computations (35) for every incident direc-tion and assuming , we obtain that
is the worst-case theoretical limitfor resolving two waves using the array of monopoles on theUAV, under the given SNR. Fig. 7 shows the CRB for theMSAEof the first wave for . Due to the increase of the numberof the unknown parameters, the MSAE is now larger than theMSAE obtained for a single incident wave. The results for thesecond wave are very similar.We now consider the scenario in which the number of the
waves is unknown. In this case we determine the resolutionof the system empirically by means of MDL, letting MDL de-cide whether one signal or two signals are present. (At rea-sonably high SNR, the probability that MDL will decide thatthree signals are present or no signal is present is negligible.)

NIKOLIC et al.: ESTIMATION OF DIRECTION OF ARRIVAL USING MULTIPATH ON ARRAY PLATFORMS 3451
Fig. 11. Experimental verification of the 3-D localization using a uniform linear array of monopoles with the aid of diffraction. The signal spectrum for DOAwas computed at (a) 0.75 GHz, (b) 1 GHz, (c) 1.5 GHz, and (d) 2 GHz. The estimation accuracy was better at higher frequencies.
Hence, MDL chooses among six hypotheses, which are definedin Section III.B. The approximate success rate of MDL is [42]
(36)
where is the actual number of signals, is the esti-mated number of signals, is the number of experiments,
is one if in the th experiment and zerootherwise. For the first half of the experiments we assume onlyone incident signal; for the second half we assume two incidentsignals. The empirical resolution is the value of
for which , where is the desired success rate. Asan illustration, we present in Fig. 8 the empirical resolutionlimit for and for a given data set. Theresults were computed in 200 experiments for . Inthe same figure we also show the resolution predicted by theCRB. However, in the latter case, the number of the waves isassumed to be known.
V. EXPERIMENT
We showed experimentally that exploiting diffraction allows3-D direction finding using a uniform linear array of monopolesat a single frequency. As a substitute for the UAV Predator, weused a square metallic plate. The side length of the plate was

3452 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
Fig. 12. Experimental verification of the 3-D localization using a uniform linear array of monopoles with the aid of diffraction. The signal spectrum for DOAwas computed at (a) 0.75 GHz, (b) 1 GHz, (c) 1.5 GHz, and (d) 2 GHz. The estimation accuracy was better at higher frequencies.
1 m. The array of eight monopoles was located along the diag-onal of the plate as illustrated in Fig. 9. The parameters of thearray, except for the number of sensors, were the same as theones used in Section II. We took a folded dipole as the unknownradiation source. The distance between the feed of the foldeddipole and the center of the plate was approximately 2.2 m.The measurements were taken in the frequency domain with theAgilent E5062A Vector Network Analyzer.We used phase conjugation [10] to compute the signal spec-
trum from the measurements
(37)
where is the measured signal at the th frequencyat the th sensor, is the embedded radiationpattern of the th sensor at the th frequency in the direction of
, and the asterisk stands for the conjugation. The radiationpattern of the array on the plate (without the folded dipole) wasobtained using WIPL-D Pro [36].In the experiment, we kept the zenith angle fixed at
and varied the azimuth so that , and. We computed the spectra at each of the frequencies:GHz, GHz, GHz, and GHz. (We
note that at the considered frequencies, each receiving antennais in the far field of the folded dipole, but there is discrepancy inthe amplitude and phase of the field compared to the plane-wave

NIKOLIC et al.: ESTIMATION OF DIRECTION OF ARRIVAL USING MULTIPATH ON ARRAY PLATFORMS 3453
Fig. 13. Diffracted rays and the direct ray for DOA: (a) ,(b) , and (c) .
case because the distance between the platform and the dipoleis relatively small. The maximal amplitude deviation is about
dB and the maximal phase error is about 14 degrees.)We show the results in Figs. 10–12. In all considered direc-
tions and at all frequencies, the azimuth was estimated accu-rately. Due to symmetry, the array could not resolve whetherthe signal impinged from the left or right side of its axis. How-ever, this ambiguity could have been resolved by placing thearray asymmetrically on the plate or by using a plate with an ir-regular shape. The estimated zenith angle was smaller than thereal one at lower frequencies ( GHz, GHz). Asthe frequency increased, the electrical size of the plate becomelarger and the error diminished.In Fig. 13, we show the direct path (denoted by ) and the
diffracted paths (denoted by and ) for one of the sensors,computed using the geometrical theory of diffraction (GTD).The diffraction points (white circles) behave as variable para-sitic elements that transform a linear array into an equivalentspatial array. In this way, it is possible to resolve both sphericalangles using single-frequency data, unlike the case for whichthere is no diffraction (i.e., if the array is mounted on the PEC).According to Keller’s diffraction functions [34], the magnitudeof the diffracted field varies as , where is the dis-tance between the diffraction point and the sensor, and is thefree-space wavelength at the operating frequency. Because ofthis slow decay, the effective aperture grows with the electricalsize of the plate, as in the case of a standard spatial array. How-ever, if the electrical size of the plate becomes very large, thediffraction becomes negligible and the performance of the arraybecomes the same as for an array on the PEC.
VI. CONCLUSION
We have demonstrated that the multipath arising from the in-teractions between sensor arrays and the hosting platform en-ables the 3-D estimation of arrival directions with uniform lineararrays even with only single frequency measurements. The ad-vantage of the presented approach, compared to the exploitationof the multipath from the target’s surroundings, is that the mul-tipath from the platforms can be determined in advance and isinvariant.We considered, theoretically, the case where the array is
mounted on the UAV Predator and, experimentally, the casewhere the array is mounted on a square metallic plate. In bothcases, the diffraction of the incident signals from the platformwas the only source of multipath. In this way, the sensing arraysmimic the human auditory system, which exploits diffractioninside the head.In order to properly model the multipath, it is necessary to
take into account the whole platform. We note that this maycause significant problems in practice for sufficiently large plat-forms. In addition, it is important to reduce the parasitic influ-ence of the measurement setup. This can be achieved via properelectromagnetic design or via signal processing.We used the Cramer–Rao bound to compare the performance
of the array with and without the platform. The response of thearray on the platform was similar to the response of the arrayconsisting of driven elements (sensors) and several parasitic el-ements (diffraction centers). These parasitic elements enlargedthe effective size of the sensing system and improved the abilityof the system to resolve closely spaced signals.The drawback of the multipath is an increase in the cross-po-
larization of the array response. Consequently, measurementmodel becomes more complex and is not identical for all direc-tions of arrival. This nonuniqueness requires the application ofmodel-selection algorithms, thus increasing the computationalcomplexity. Nevertheless, the performance of the linear arrayon the UAV is superior to that of the array on the PEC, which isunable to estimate the 3-D DOA of even a single wave.
REFERENCES
[1] D. W. Batteau, “The role of the pinna in human localization,” in Proc.Roy. Soc. London Ser. B, Aug. 1967, vol. 168, no. 1011, BiologicalSciences.
[2] S. Sen and A. Nehorai, “Exploiting close-to-the-sensor multipath re-flections using a human-hearing-inspired model,” IEEE Trans. SignalProcess., vol. 57, no. 2, pp. 803–908, Feb. 2009.
[3] M. Nikolic, A. Nehorai, and A. Djordjevic, “Exploiting multipath fromairborne platform for direction of arrival estimation,” presented at theEur. Conf. Antennas and Propagation, Berlin, Germany, 2009.
[4] T. Lo and J. Litva, “Use of a highly deterministic multipath signalmodel in low-angle tracking,” IEE Proc. F, Radar Signal Process., vol.138, no. 2, pp. 163–171, Apr. 1991.
[5] S. Sen and A. Nehorai, “Adaptive OFDM radar for target detection inmultipath scenarios,” IEEE Trans. Signal Process., vol. 51, no. 1, pp.78–90, Jan. 2011.
[6] C. D. Berube, P. R. Felcyn, K. Hsu, J. H. Latimer, II, and D. B. Swanay,“Target height estimation using multipath over land,” in Proc. IEEERadar Conf., Boston, MA, 2007, pp. 88–92.
[7] J. L. Krolik, J. Farrell, and A. Steinhardt, “Exploiting multipath propa-gation for GMTI in urban environments,” presented at the IEEE Conf.Radar, Apr. 2006.
[8] V. Algeier, B. Demissie, W. Koch, and R. Thomä, “State space initi-ation for blind mobile terminal position tracking,” EURASIP J. Adv.Signal Process., Special Issue on Track Before Detect Algorithms, vol.2008, no. 1.
[9] Multipath Exploitation Radar Industry Day, DARPA, Aug. 2007.[10] C. J. Nolan, M. Cheney, T. Dowling, and R. Gaburro, “Enhanced an-
gular resolution from multiply scattered waves,” Inv. Probl., vol. 22,pp. 1817–1834, 2006.

3454 IEEE TRANSACTIONS ON ANTENNAS AND PROPAGATION, VOL. 60, NO. 7, JULY 2012
[11] B. Ya. Zel’dovich, N. F. Pilipetsky, and V. V. Shkunov, Principles ofPhase Conjugation. New York: Springer-Verlag, 1985.
[12] G. Lerosey, J. de Rosny, A. Tourin, and M. Fink, “Focusing beyondthe diffraction limit with far-field time reversal,” Science, vol. 315, p.1120, 2007.
[13] M. Fink, “Time reversed acoustics,” Phys. Today, vol. 50, pp. 34–40,1997.
[14] D. Liu, S. Vasudevan, J. Krolik, G. Bal, and L. Carin, “Electromag-netic time-reversal source localization in changing media: Experimentand analysis,” IEEE Trans. Antennas Propagat., vol. 55, no. 2, pp.344–354, Feb. 2007.
[15] L. Carin, D. Liu, andY. Xue, “In situ compressive sensing,” Inv. Probl.,vol. 24, no. 1, pp. 15–23, Feb. 2008.
[16] G. Golden, C. Foschini, R. Valenzuela, and P. Wolniansky, “Detec-tion algorithm and initial laboratory results using VBLAST space-timecommunication architecture,” Electron. Lett., vol. 35, 1999.
[17] H. Steyskal, “Synthesis of antenna patterns with imposed near-fieldnulls,” Electron. Lett., vol. 30, no. 24, pp. 2000–2001, Nov. 1994.
[18] L. Landesa, F. Obelleiro, J. L. Rodriguez, J. A. Rodriguez, F. Ares,and A. G. Pino, “Pattern synthesis of array antennas with additionalisolation of near-field arbitrary objects,” Electron. Lett., vol. 34, no.16, pp. 1540–1542, Aug. 1998.
[19] O. M. Bucci, A. Capozzoli, and G. D’Elia, “Power pattern synthesisof reconfigurable conformal arrays with near-field constraints,” IEEETrans. Antennas Propagat., vol. 52, no. 1, pp. 132–141, Jan. 2004.
[20] F. Obelleiro, L. Landesa, J. L. Rodriguez, A. G. Pino, and M. R. Pino,“Directivity optimization of an array antenna with obstacles within itsnear field region,” Electron. Lett., vol. 33, no. 25, pp. 2087–2088, Dec.1997.
[21] L. Landesa, F. Obelleiro, J. L. Rodriguez, and A. G. Pino, “Pattern syn-thesis of array antennas in presence of conducting bodies of arbitraryshape,” Electron. Lett., vol. 33, no. 18, pp. 1512–1513, Aug. 1997.
[22] F. Obelleiro, L. Landesa, J. M. Taboada, and J. L. Rodriguez,“Synthesis of onboard array antennas including interaction with themounting platform and mutual coupling effects,” IEEE AntennasPropagat. Mag., vol. 43, no. 2, pp. 76–82, Apr. 2001.
[23] T. Su and H. Ling, “Array beamforming in the presence of a mountingtower using genetic algorithms,” IEEE Trans. Antennas Propagat, vol.53, no. 6, pp. 2011–2019, Jun. 2005.
[24] P. Stoica and K. C. Sharman, “Maximum likelihood methods fordirection-of-arrival estimation,” IEEE Trans. Acoust., Speech SignalProcess,, vol. 38, no. 7, pp. 1132–1143, Jul. 1990.
[25] M. H. Hansen and B. Yu, “Model selection and the principle of min-imum description length,” J. Amer. Statist. Assoc., vol. 96, no. 454, pp.775–776, Jun. 2001.
[26] I. T. Castro, L. Landesa, J. M. Taboada, and F. Obelleiro, “TheCramer–Rao bound for the estimation of angles of arrival in on-boardarray antennas,” Microw. Opt. Technol. Lett., vol. 33, no. 2, pp.119–123.
[27] M. Landmann, A. Richter, and R. Thomä, “DoA resolution limits inMIMO channel sounding,” presented at the Int. Symp. Antennas andPropagation and USNC/URSI National Radio Science Meeting, Mon-terey, CA, Jun. 20–26, 2004.
[28] M. Costa, V. Koivunen, and A. Richter, “Azimuth, elevation, and po-larization estimation for arbitrary polarimetric array configurations,” inProc. 15th IEEE/SP Workshop on Statistical Signal Processing, Aug.2009, pp. 261–264.
[29] M. Alvarez-Folgueiras, J. A. Rodriguez-Gonzalez, and F. Ares-Pena,“Low-sidelobe patterns from small, low-loss uniformly fed linear ar-rays illuminating parasitic dipoles,” IEEE Trans. Antennas Propagat.,vol. 57, no. 5, pp. 1584–1586, May 2009.
[30] S. Chen, A. Hirata, T. Ohira, and N. C. Karmakar, “Fast beamformingof electronically steerable parasitic array radiator antennas: Theoryand experiment,” IEEE Trans. Antennas Propagat., vol. 52, no. 7, pp.1819–1832, Jul. 2004.
[31] H. Kawakami and T. Ohira, “Electrically steerable passive array radi-ator (ESPAR) antennas,” IEEE Antennas Propagat. Mag., vol. 47, no.2, pp. 43–50, Apr. 2005.
[32] E. Taillefer, A. Hirata, and T. Ohira, “Direction-of-arrival estimationusing radiation power pattern with an ESPAR antenna,” IEEE Trans.Antennas Propagat., vol. 53, no. 2, pp. 678–684, Feb. 2005.
[33] T. Svantesson and M. Wennstrom, “High-resolution direction findingusing a switched parasitic antenna,” in Proc. 11th IEEE Signal Pro-cessing Workshop on Statistical Signal Processing, Aug. 2001, pp.508–511.
[34] C. A. Balanis, Antenna Theory: Analysis and Design. New York:Wiley, 1997.
[35] [Online]. Available: http://www.the3dstudio.com[36] [Online]. Available: http://www.wipl-d.com[37] S. M. Kay, Fundamentals of Statistical Signal Processing: Estimation
Theory. Upper Saddle River, NJ: Prentice-Hall, 1993.[38] H. M. Antia, Numerical Methods for Scientists and Engineers. Basel,
Switzerland: Birkhasuer Verlag, 2002, vol. 1, pp. 160–164.
[39] M. Landmann, W. Kotterman, and R. S. Thomä, “On the influence ofincomplete data models on estimated angular distributions in channelcharacterization,” presented at the Eur. Conf. Antennas and Propaga-tion, Edinburgh, U.K., Nov. 2007.
[40] J. Nelder and R. Mead, “A simplex method for function minimization,”Comput. J., vol. 7, pp. 308–313, 1965.
[41] A. Nehorai and E. Paldi, “Vector-sensor array processing for electro-magnetic source localization,” IEEE Trans. Signal Process., vol. 42,no. 2, pp. 376–398, Feb. 1994.
[42] A. Amar and A. J. Weiss, “Fundamental limitations on the resolutionof deterministic signals,” IEEE Trans. Signal Process., vol. 56, no. 11,pp. 5309–5318, Nov. 2008.
Marija M. Nikolić received the B.Sc., M.Sc., andPh.D. degrees from the University of Belgrade,Serbia, in 2000, 2003, and 2007, respectively, andthe Ph.D. degree in electrical engineering fromWashington University, St. Louis, MO, in 2011.In 2001, she joined the School of Electrical Engi-
neering, University of Belgrade, as a Teaching Assis-tant. In 2008, she was promoted to an Assistant pro-fessor. She is interested in inverse scattering, arrayprocessing, and antennas analysis and design.
Arye Nehorai (S’80–M’83–SM’90–F’94) receivedthe B.Sc. and. M.Sc. degrees from the Technion,Haifa, Israel, and the Ph.D. degree from StanfordUniversity, Stanford, CA.is the Eugene and Martha Lohman Professor and
Chair of the Preston M. Green Department of Elec-trical and Systems Engineering (ESE), WashingtonUniversity, St. Louis (WUSTL), MO. He serves asthe Director of the Center for Sensor Signal and In-formation Processing at WUSTL. Earlier, he was afaculty member at Yale University, New Haven, CT,
and the University of Illinois at Chicago. Under his ESE Department Chair po-sition, the enrollment of undergraduates has more than doubled in the last threeyears.Dr. Nehorai served as Editor-in-Chief of the IEEE TRANSACTIONS ON SIGNAL
PROCESSING from 2000 to 2002. From 2003 to 2005, he was Vice President(Publications) of the IEEE Signal Processing Society (SPS), Chair of the Pub-lications Board, and member of the Executive Committee of this Society. Hewas the founding editor of the special columns on Leadership Reflections in theIEEE Signal Processing Magazine from 2003 to 2006. He received the 2006IEEE SPS Technical Achievement Award and the 2010 IEEE SPS MeritoriousService Award. He was elected Distinguished Lecturer of the IEEE SPS for theterm 2004 to 2005. He was corecipient of the IEEE SPS 1989 Senior Award forBest Paper coauthor of the 2003 Young Author Best Paper Award and co-re-cipient of the 2004 Magazine Paper Award. In 2001, he was named UniversityScholar of the University of Illinois. He was the Principal Investigator of theMultidisciplinary University Research Initiative (MURI) project titled Adap-tive Waveform Diversity for Full Spectral Dominance from 2005 to 2010. Hehas been a Fellow of the Royal Statistical Society since 1996.
Antonije R. Djordjevic was born in Belgrade,Serbia, on April 28, 1952. He received the B.Sc.,M.Sc., and Ph.D. degrees from the School of Elec-trical Engineering, University of Belgrade, in 1975,1977, and 1979, respectively.In 1975, he joined the School of Electrical Engi-
neering, University of Belgrade, as a Teaching Assis-tant. He was promoted to an Assistant Professor, As-sociate Professor, and Professor, in 1982, 1988, and1993, respectively. In 1983, he was a Visiting Asso-ciate Professor at Rochester Institute of Technology,
Rochester, NY. Since 1992, he has been an Adjunct Scholar with Syracuse Uni-versity, Syracuse, NY. In 1997, he became a Corresponding Member of the Ser-bian Academy of Sciences and Arts, and he became a Full Member in 2006. Hismain area of interest is numerical electromagnetics, in particular, applied to fastdigital signal interconnects, wire and surface antennas, microwave passive cir-cuits, and electromagnetic-compatibility problems.