Embed Size (px)
Citation preview
2D Transformations2D Transformations
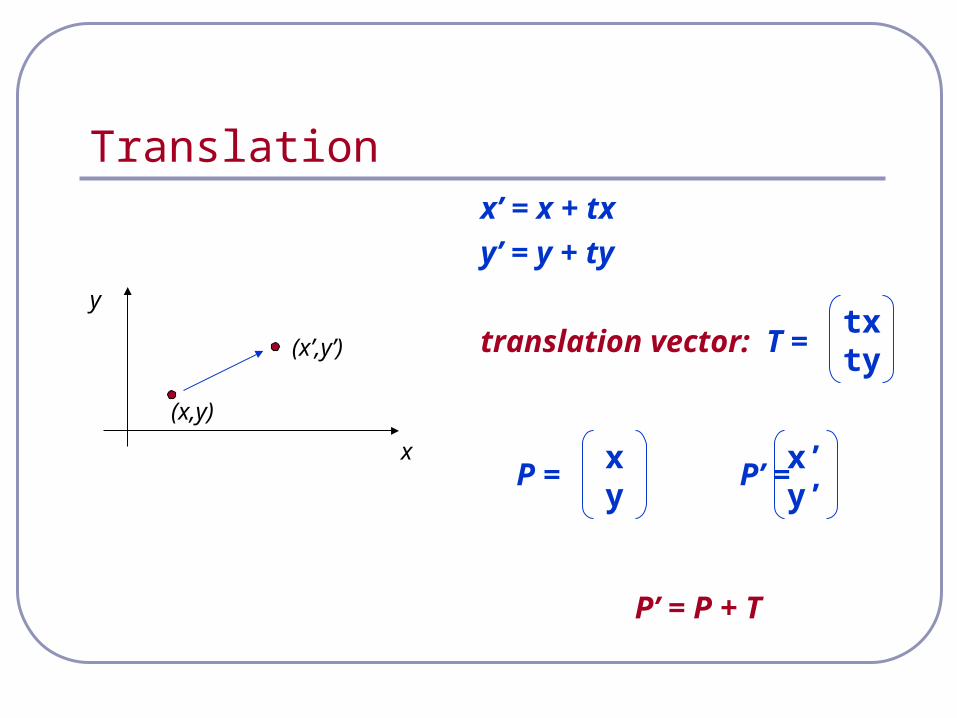
Translation x’ = x + tx
y’ = y + ty
translation vector: T =
P = P’ =
P’ = P + T
x
y
(x,y)
(x’,y’)txty
xy
x’y’
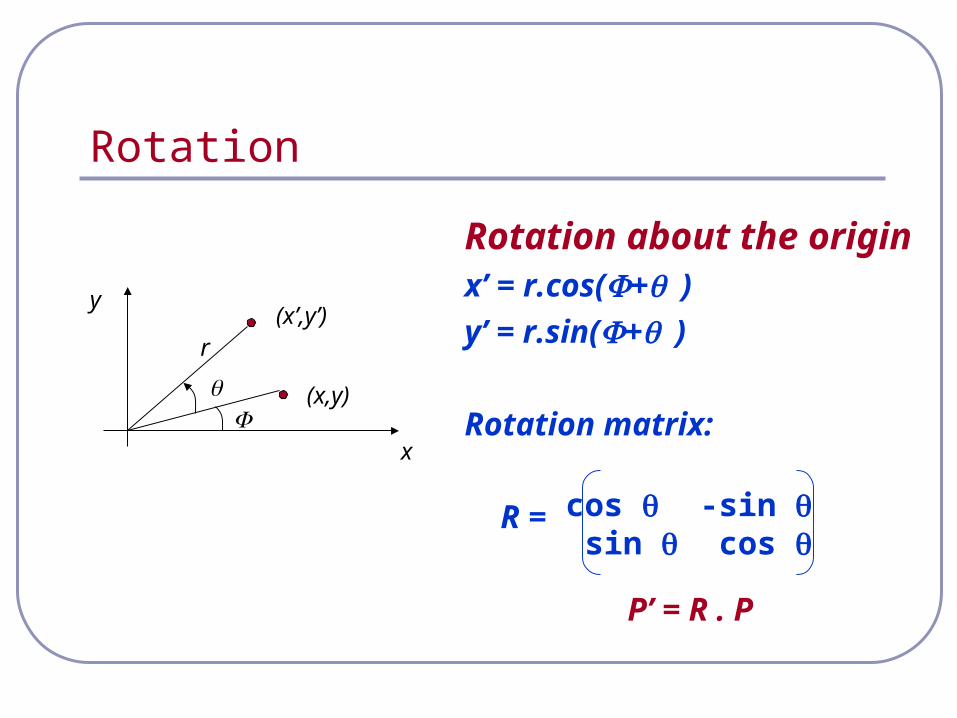
Rotation
Rotation about the originx’ = r.cos(+)
y’ = r.sin(+)
Rotation matrix:
R =
P’ = R . P
x
y
(x,y)
(x’,y’)
cos -sin sin cos
r
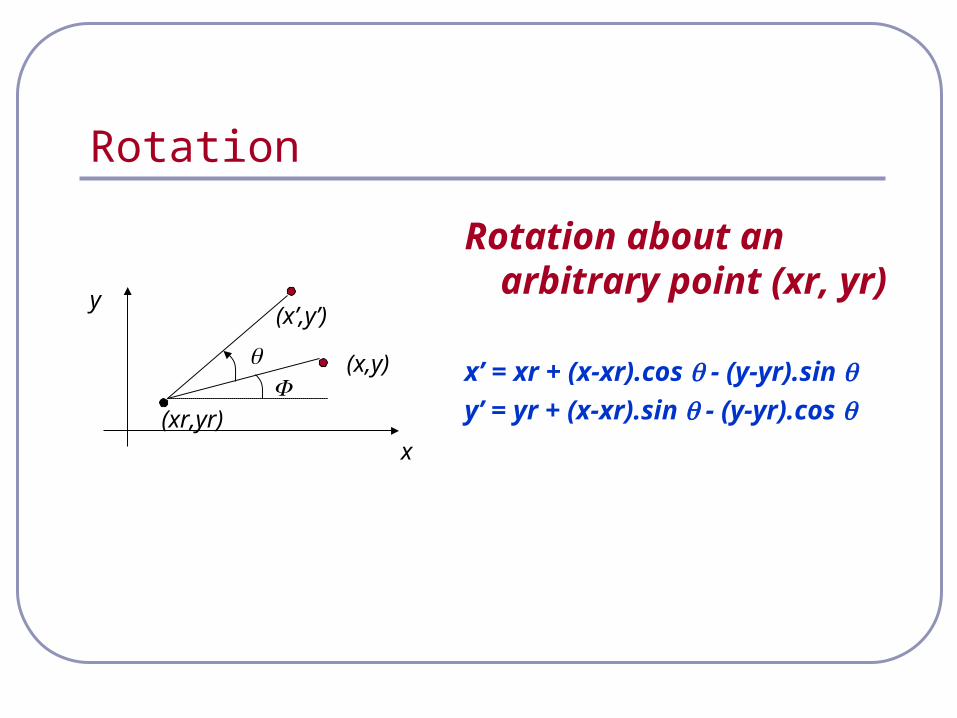
Rotation
Rotation about an arbitrary point (xr, yr)
x’ = xr + (x-xr).cos - (y-yr).sin y’ = yr + (x-xr).sin - (y-yr).cos
x
y
(x,y)
(x’,y’)
(xr,yr)
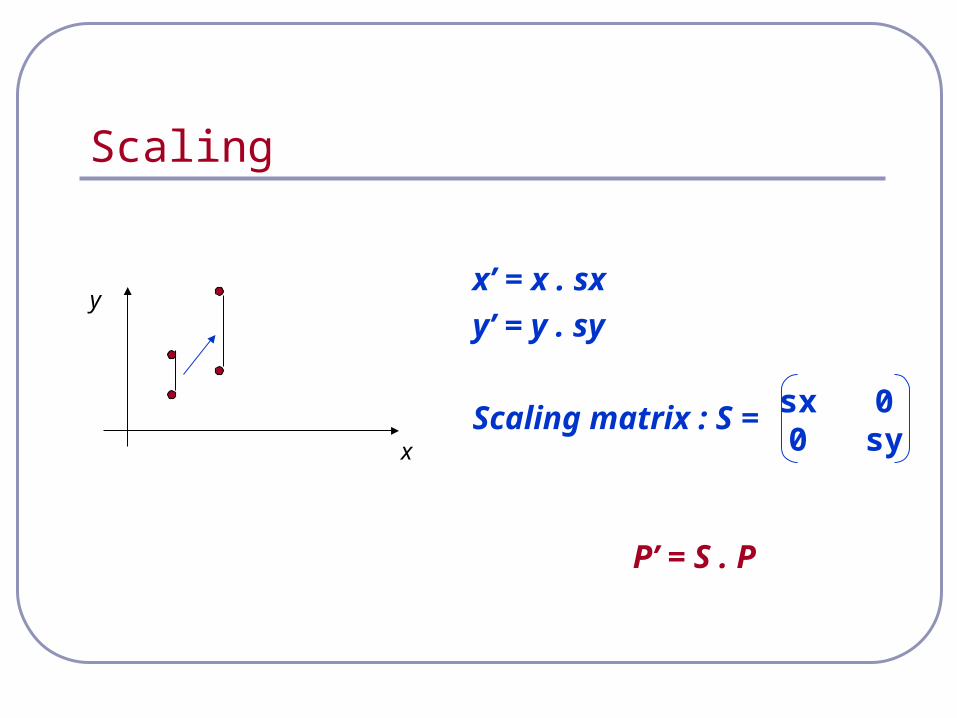
Scaling
x’ = x . sx
y’ = y . sy
Scaling matrix : S =
P’ = S . P
x
y
sx 0 0 sy
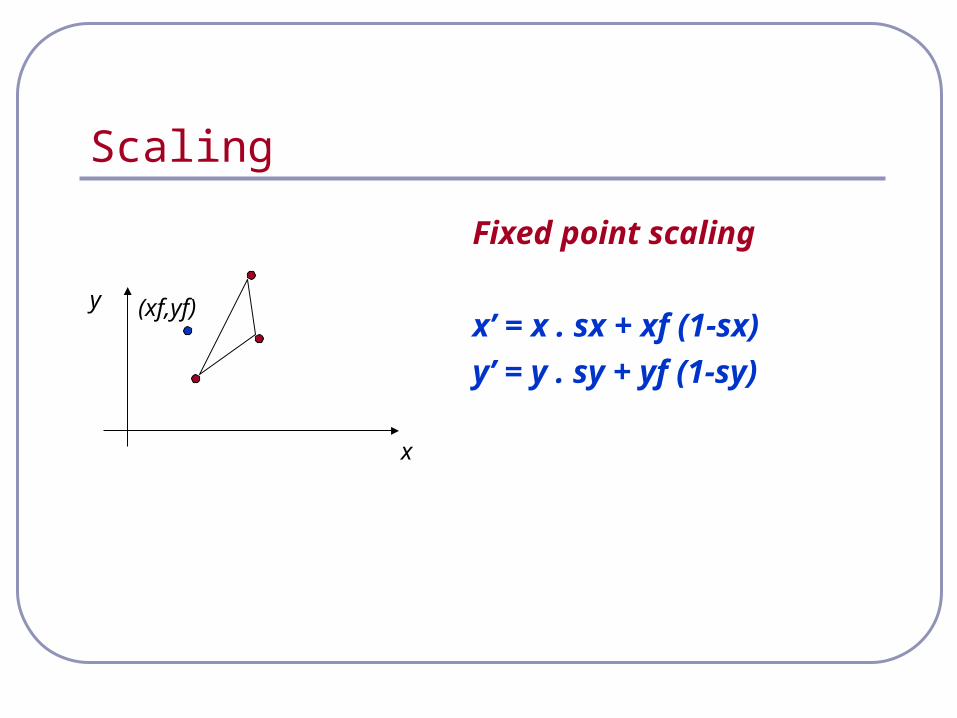
Scaling
Fixed point scaling
x’ = x . sx + xf (1-sx)
y’ = y . sy + yf (1-sy)
x
y (xf,yf)
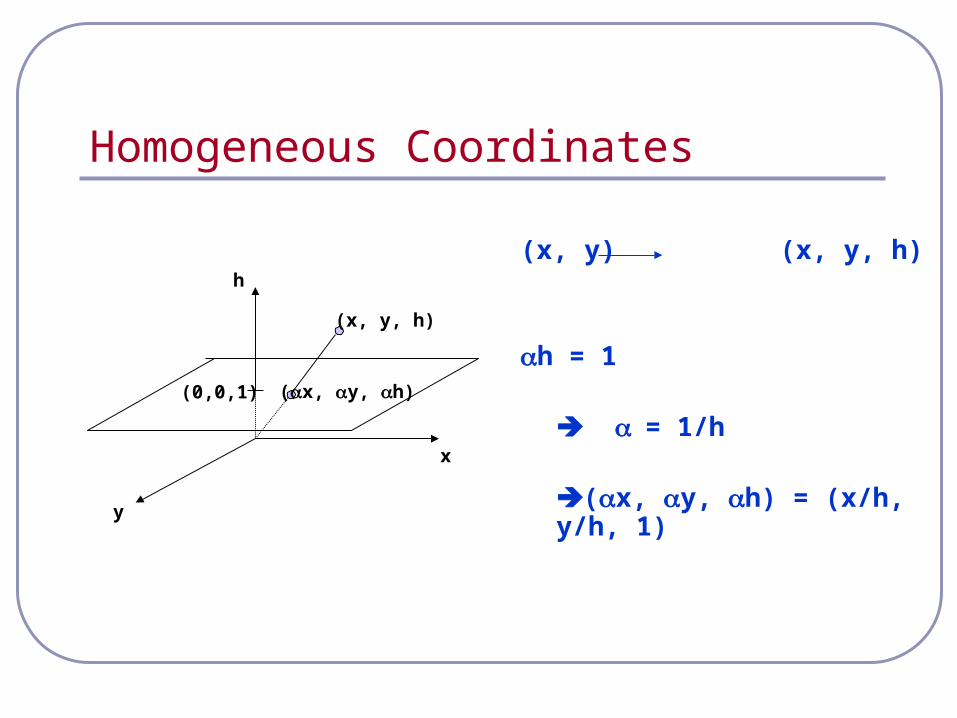
Homogeneous Coordinates
(x, y) (x, y, h)
h = 1
= 1/h
(x, y, h) = (x/h, y/h, 1)
(x, y, h)(0,0,1)
(x, y, h)
x
h
y
Homogeneous Coordinates
(x,y) (xh, yh, h)
xh= h.x
yh= h.y
(xh, yh, h) = (h.x, h.y, h)
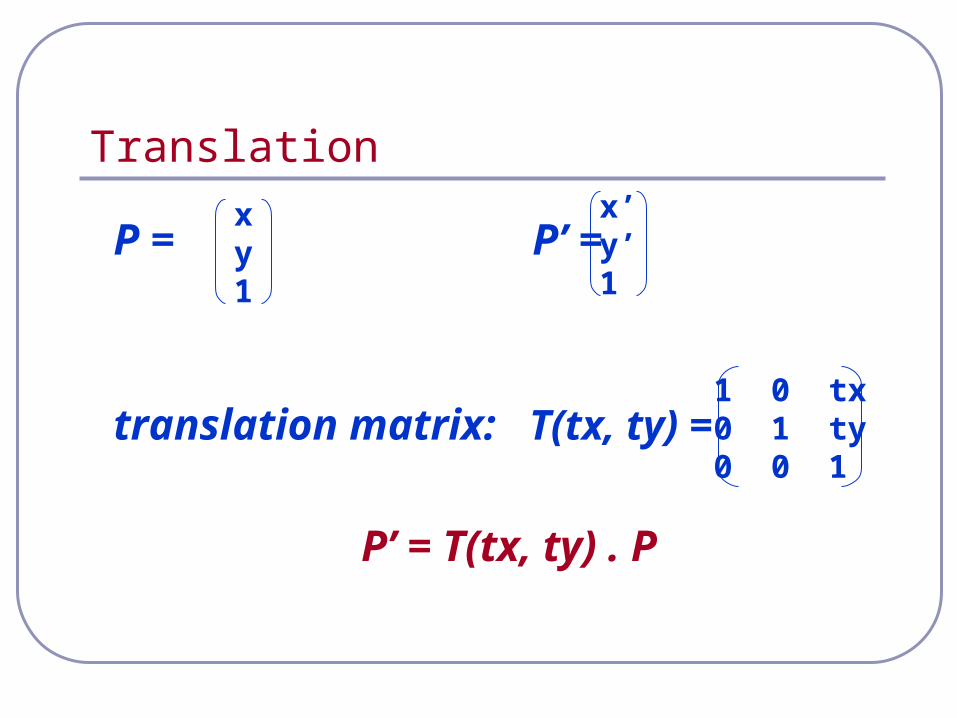
Translation
P = P’ =
translation matrix: T(tx, ty) =
P’ = T(tx, ty) . P
1 0 tx0 1 ty0 0 1
xy1
x’y’1
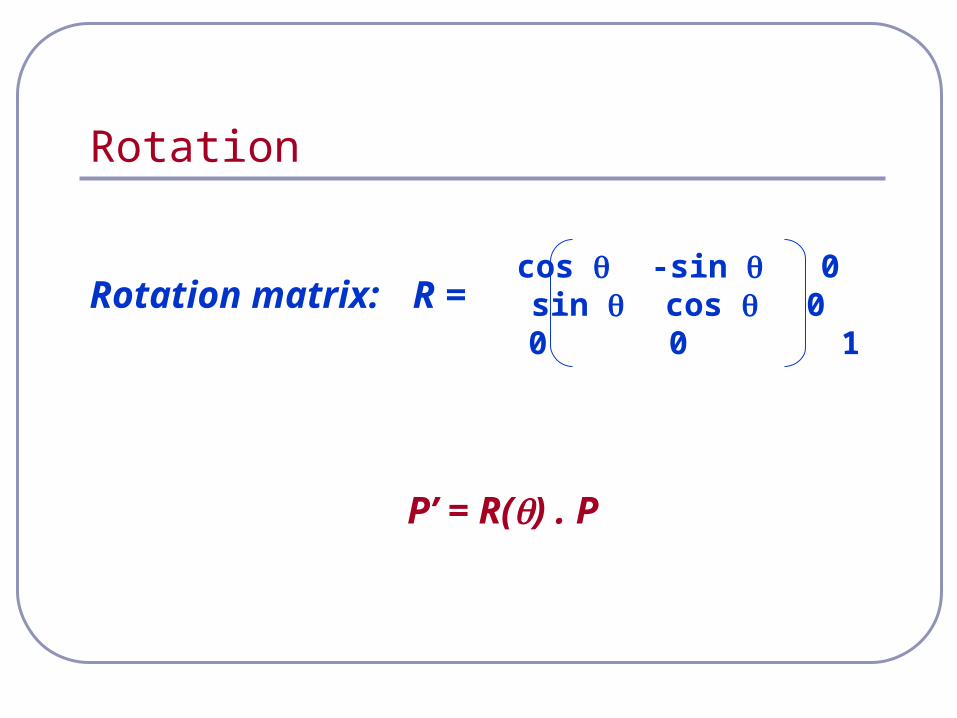
Rotation
Rotation matrix: R =
P’ = R() . P
cos -sin 0sin cos 00 0 1
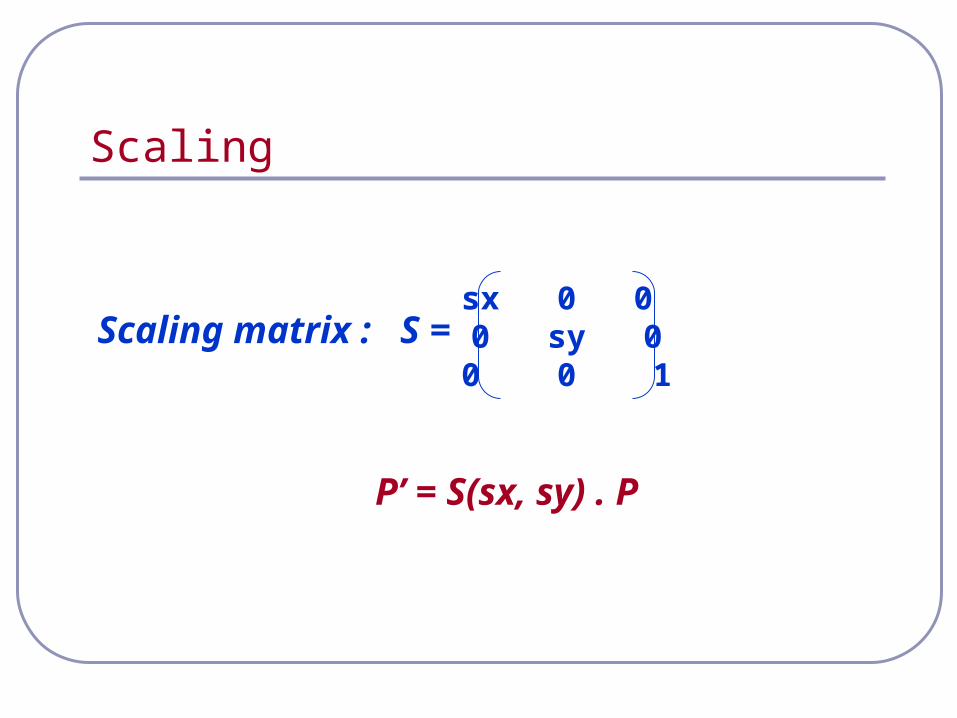
Scaling
Scaling matrix : S =
P’ = S(sx, sy) . P
sx 0 0 0 sy 00 0 1
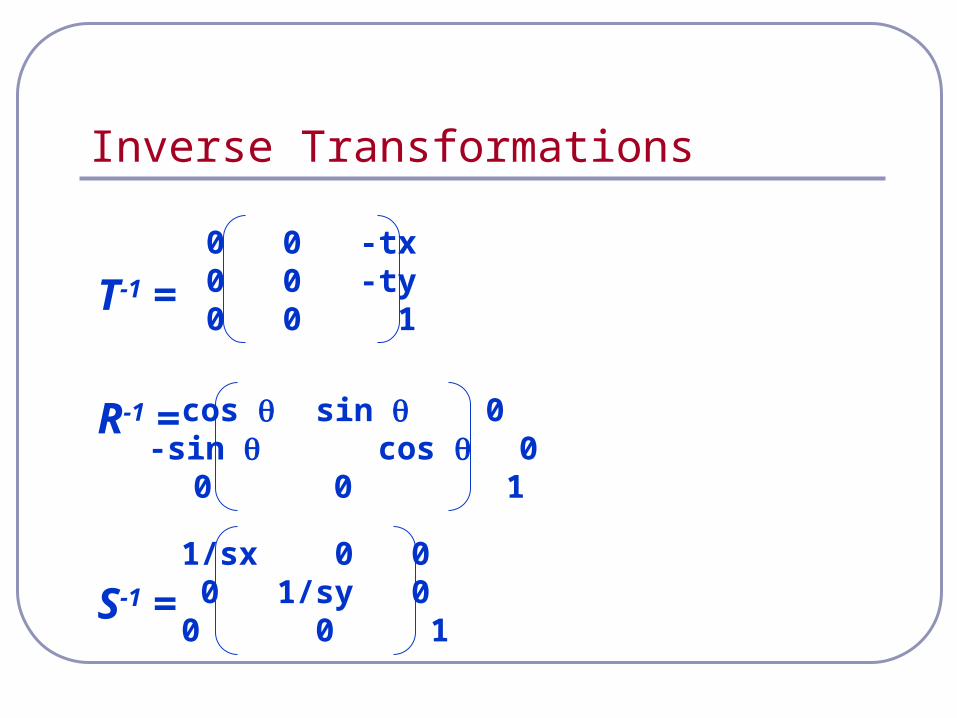
Inverse Transformations
T-1 =
R-1 =
S-1 =
0 0 -tx 0 0 -ty0 0 1
1/sx 0 0 0 1/sy 00 0 1
cos sin 0-sin cos 00 0 1
Composite Transformations
P’ = M3 . M2 . M1 . P= M . P
M: composite matrix
T(t2x, t2y) . T(t1x, t1y) = T( t1x+t2x, t1y+t2y )
R(2) . R(1) = R( 1+2 )
S(s2x, s2y) . S(s1x, s1y) = S( s1x.s2x, s1y.s2y )
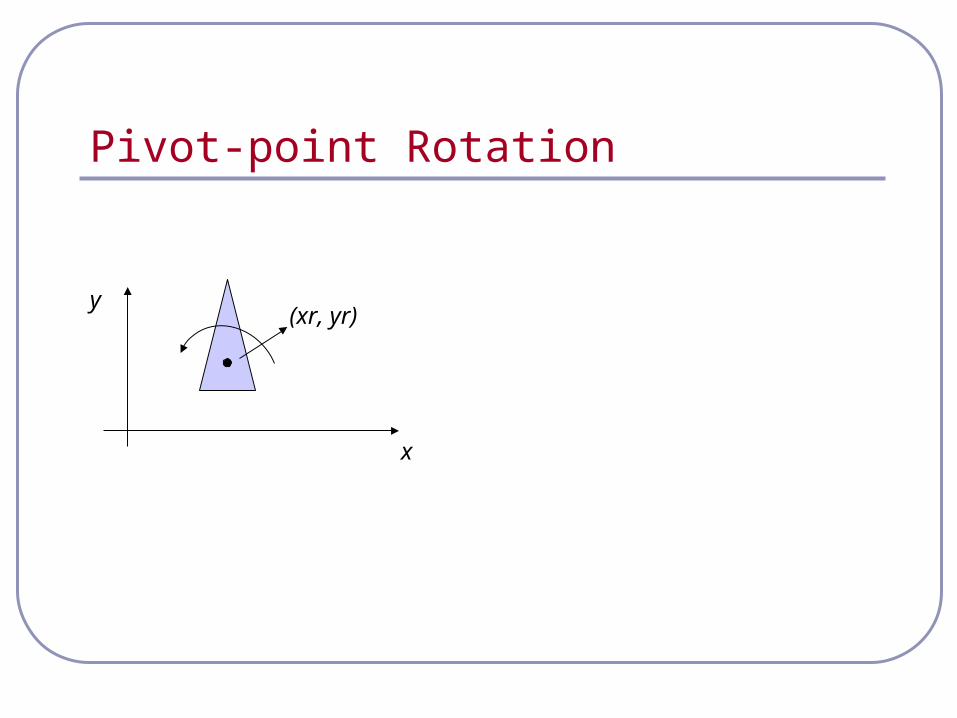
Pivot-point Rotation
x
y(xr, yr)
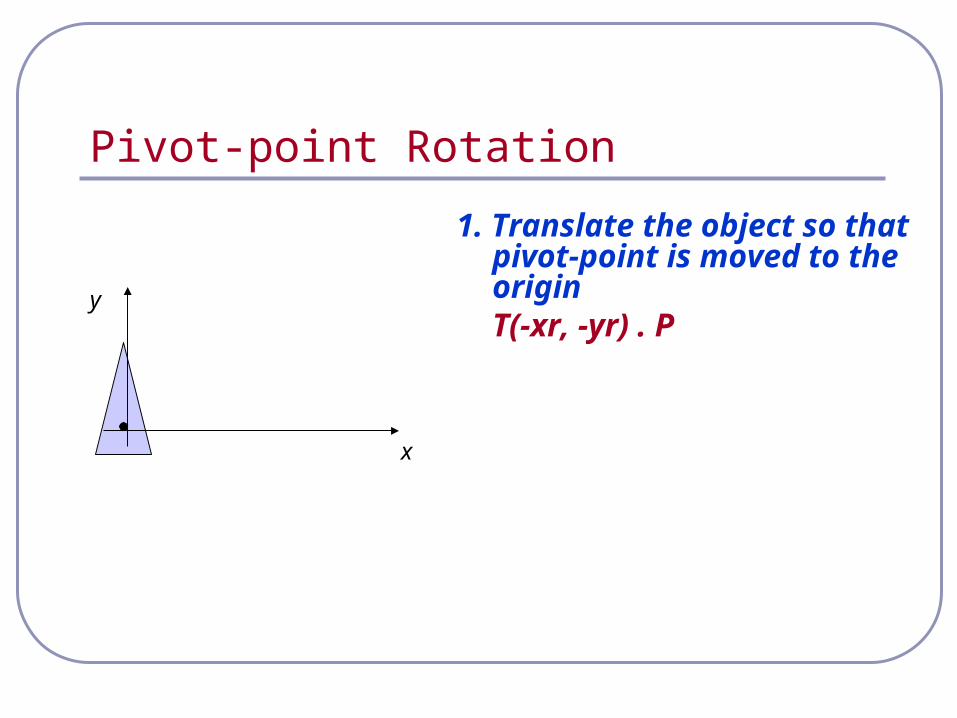
Pivot-point Rotation
x
y
1. Translate the object so that pivot-point is moved to the originT(-xr, -yr) . P
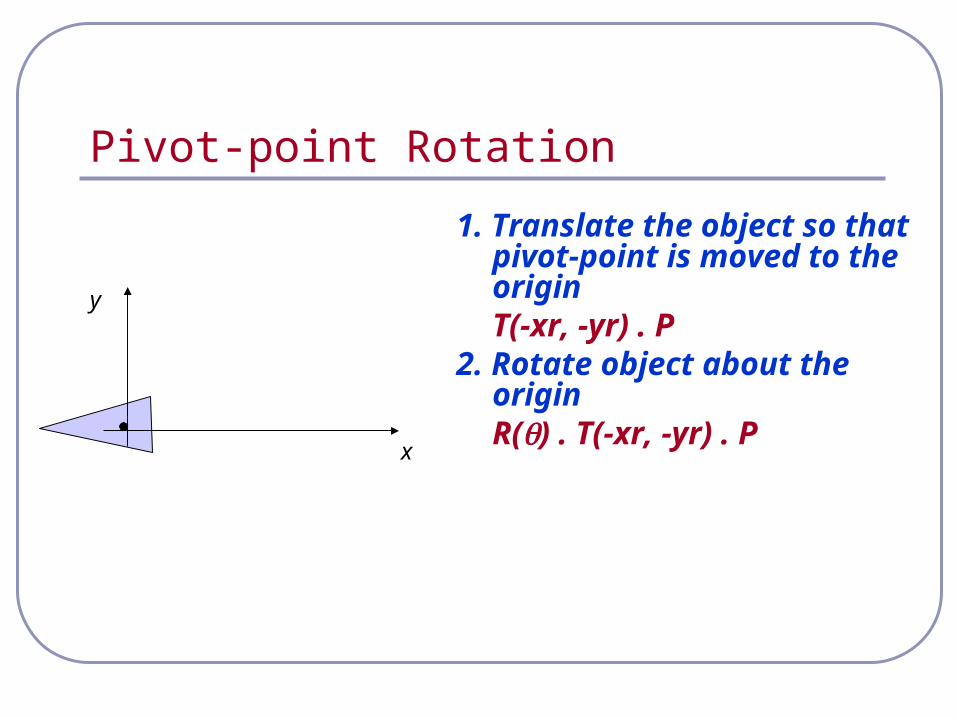
Pivot-point Rotation
x
y
1. Translate the object so that pivot-point is moved to the originT(-xr, -yr) . P
2. Rotate object about the originR() . T(-xr, -yr) . P
Pivot-point Rotation
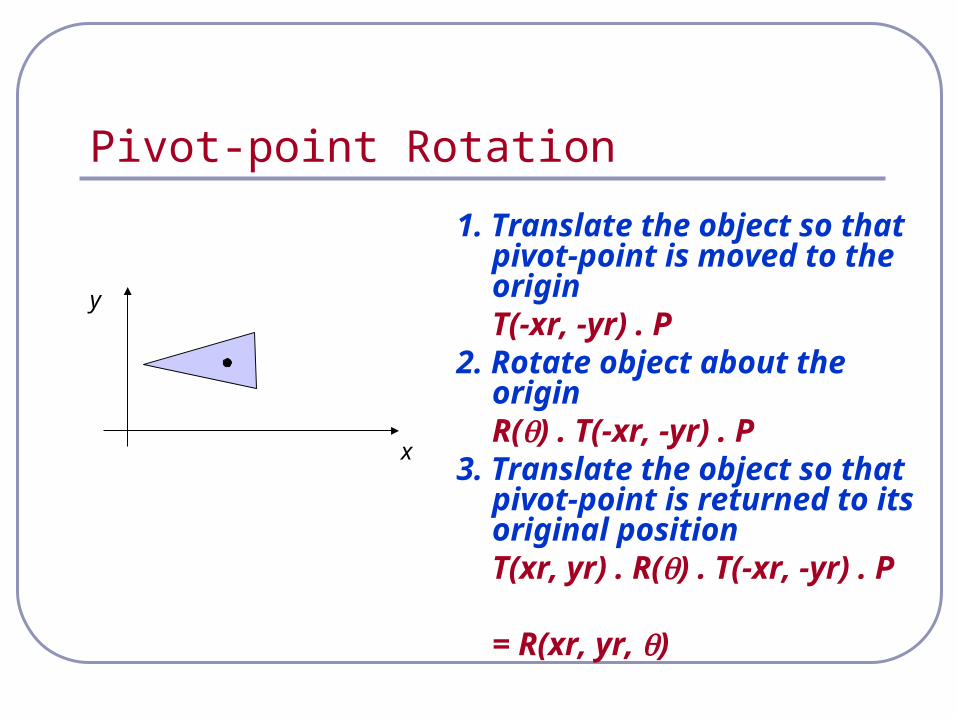
1. Translate the object so that pivot-point is moved to the originT(-xr, -yr) . P
2. Rotate object about the originR() . T(-xr, -yr) . P
3. Translate the object so that pivot-point is returned to its original positionT(xr, yr) . R() . T(-xr, -yr) . P
= R(xr, yr, )
x
y
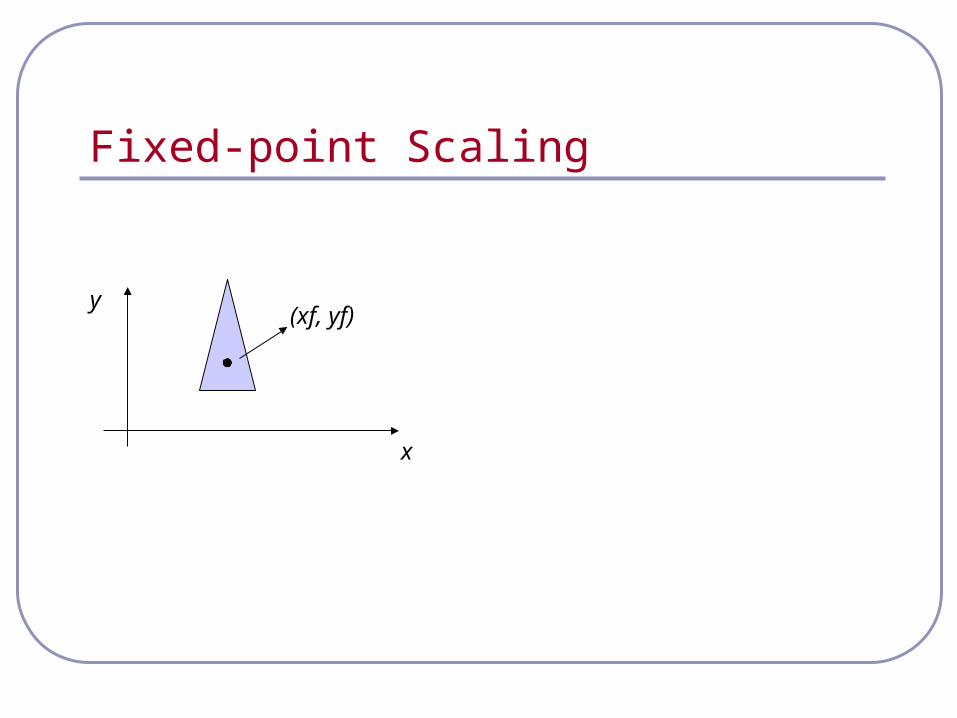
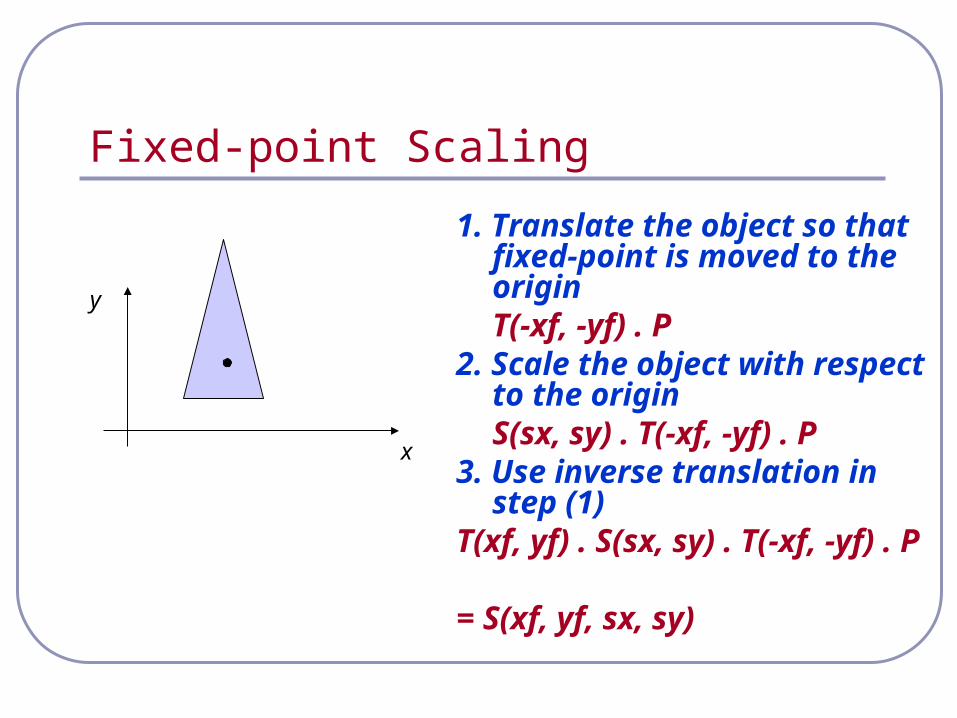
Fixed-point Scaling
x
y(xf, yf)
Fixed-point Scaling
x
y
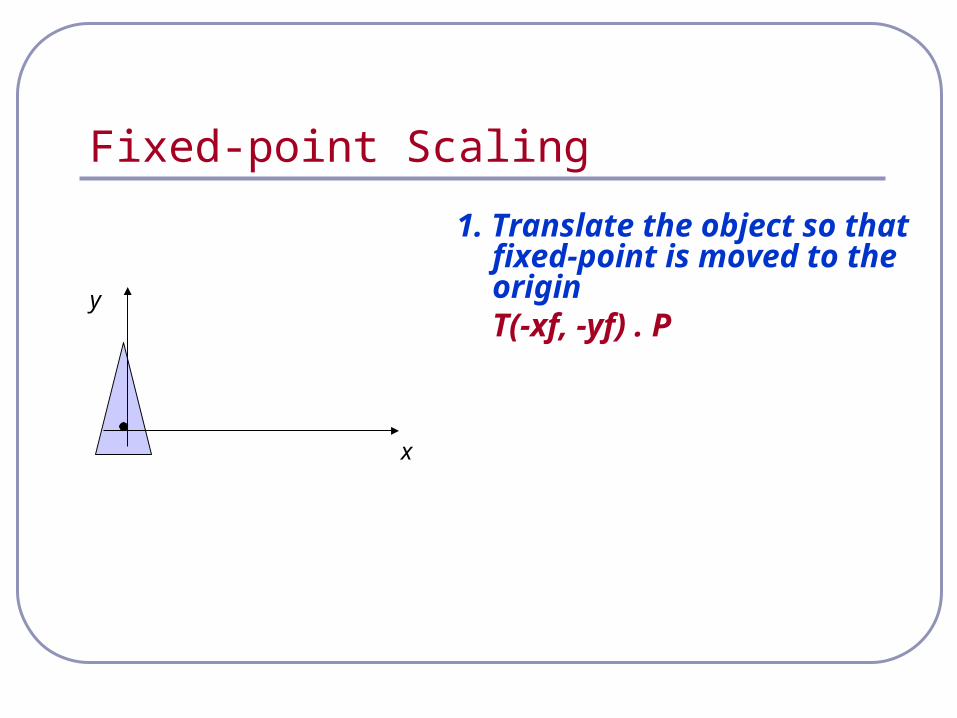
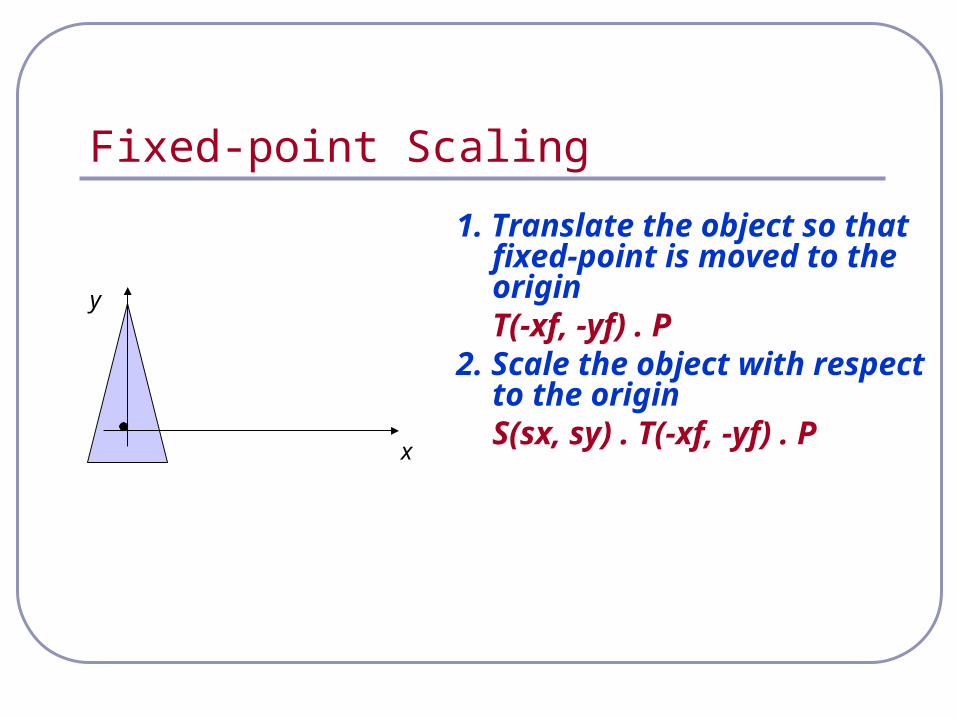
1. Translate the object so that fixed-point is moved to the originT(-xf, -yf) . P
Fixed-point Scaling
x
y
1. Translate the object so that fixed-point is moved to the originT(-xf, -yf) . P
2. Scale the object with respect to the originS(sx, sy) . T(-xf, -yf) . P
Fixed-point Scaling
x
y
1. Translate the object so that fixed-point is moved to the originT(-xf, -yf) . P
2. Scale the object with respect to the originS(sx, sy) . T(-xf, -yf) . P
3. Use inverse translation in step (1)
T(xf, yf) . S(sx, sy) . T(-xf, -yf) . P = S(xf, yf, sx, sy)
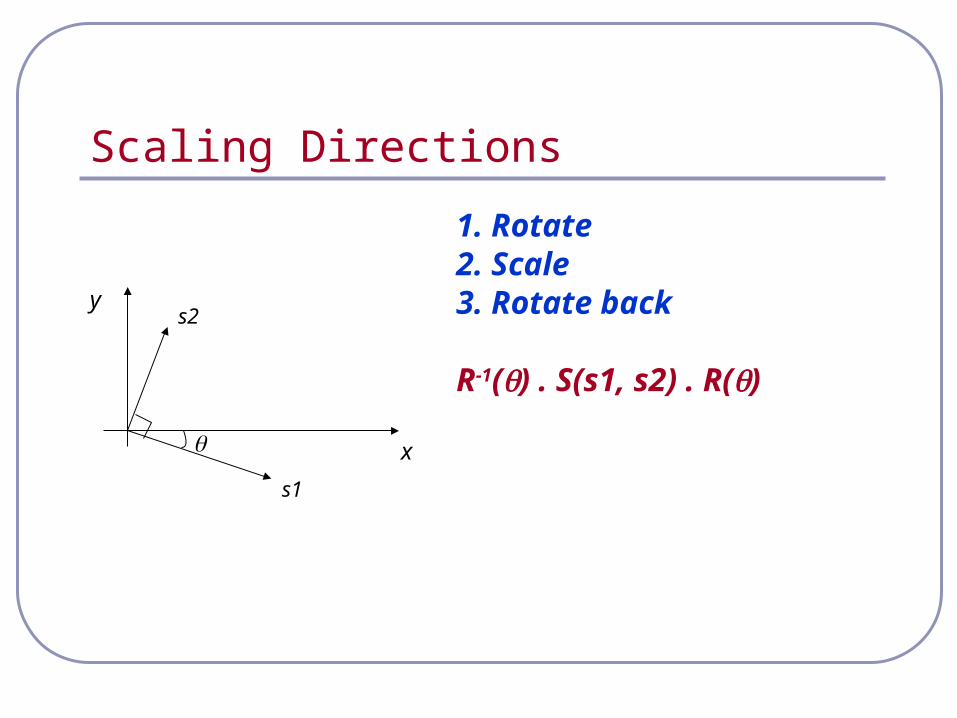
Scaling Directions
x
y
1. Rotate2. Scale 3. Rotate back
R-1() . S(s1, s2) . R()
s2
s1
Rigid-Body Transformation
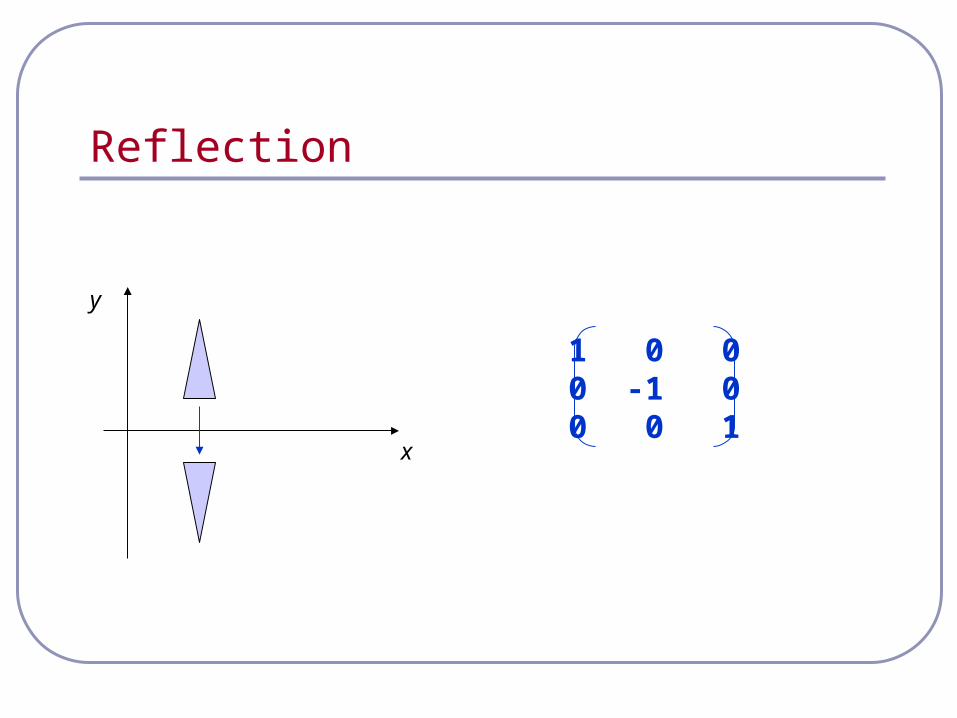
Reflection
x
y
1 0 0 0 -1 00 0 1
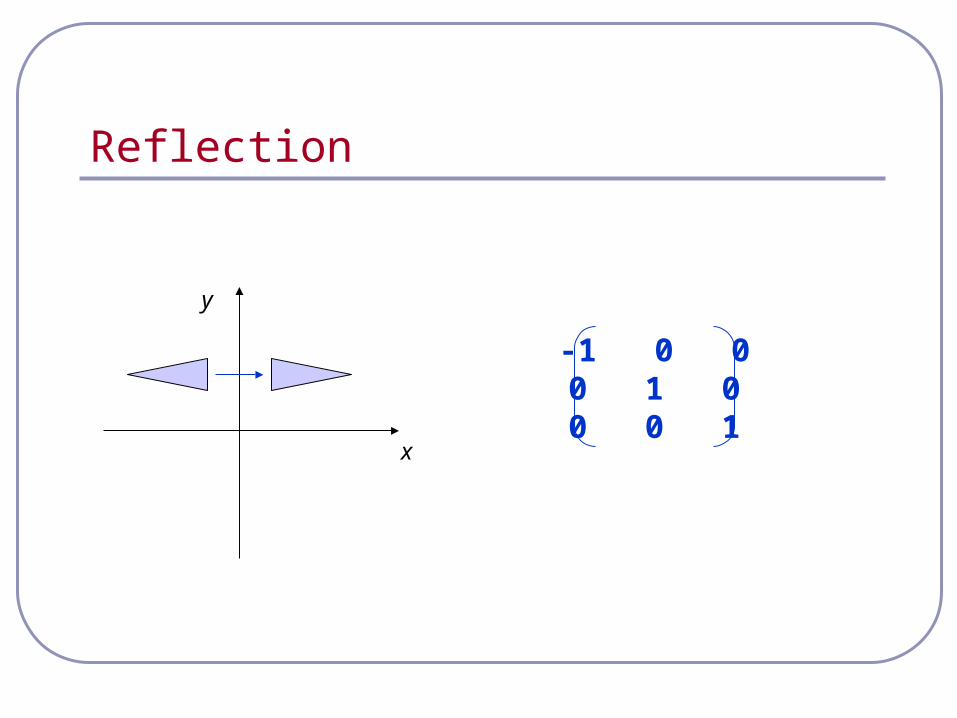
Reflection
x
y
-1 0 0 0 1 00 0 1
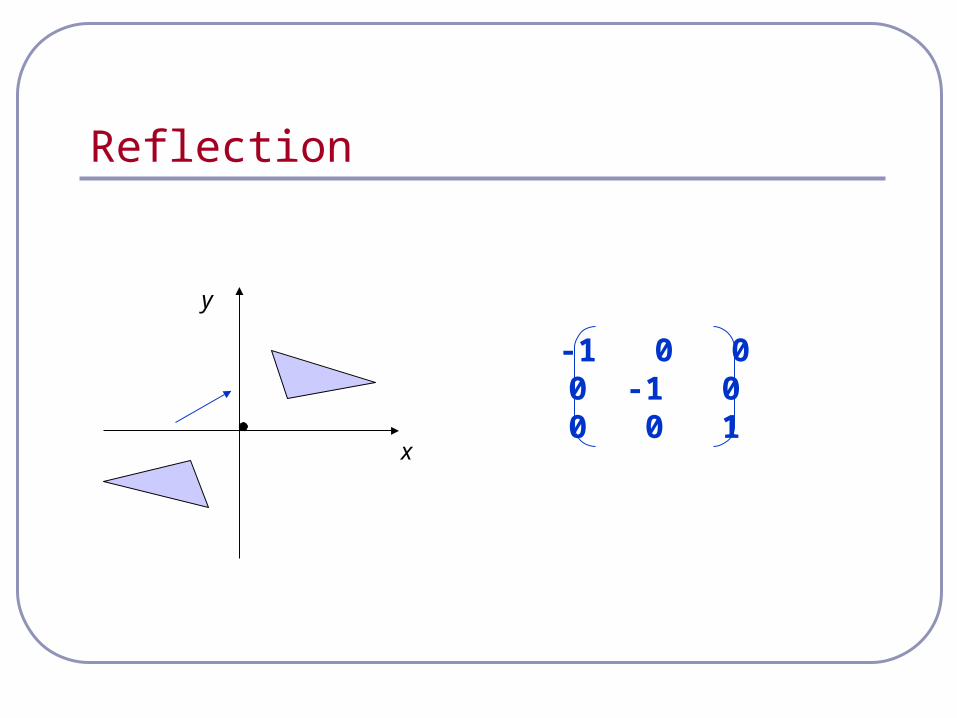
Reflection
x
y
-1 0 0 0 -1 00 0 1
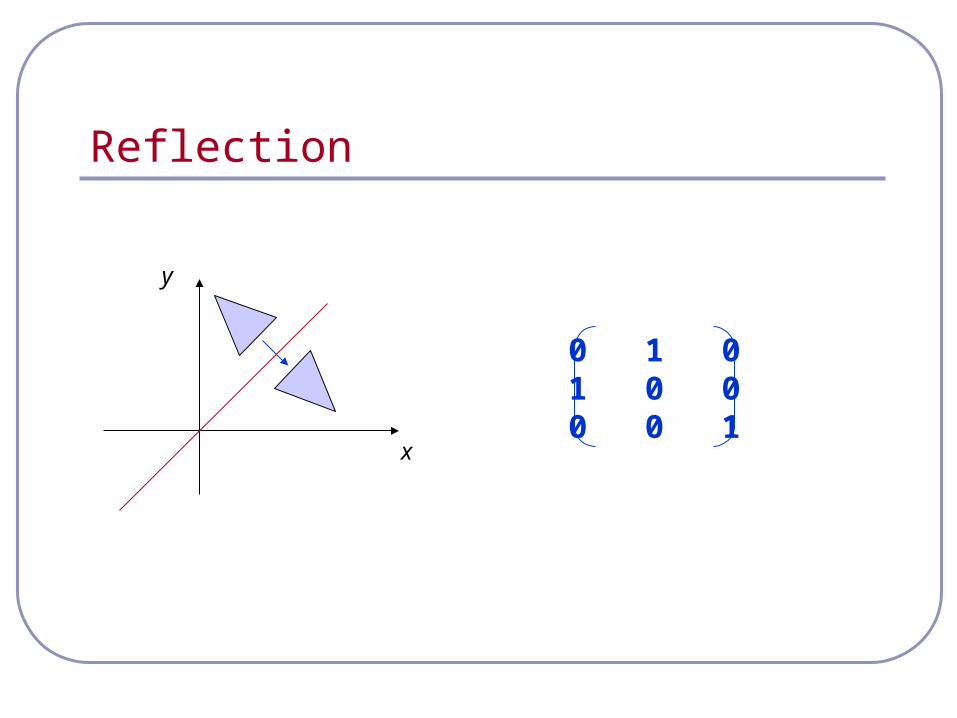
Reflection
x
y
0 1 0 1 0 00 0 1
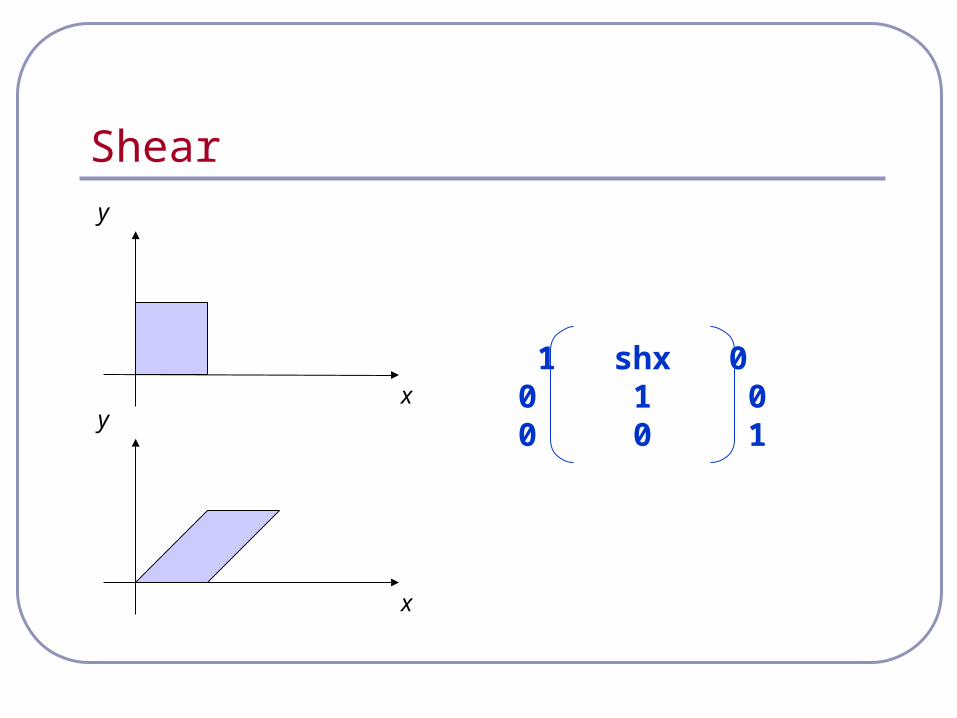
Shear
x
y
1 shx 0 0 1 00 0 1
x
y
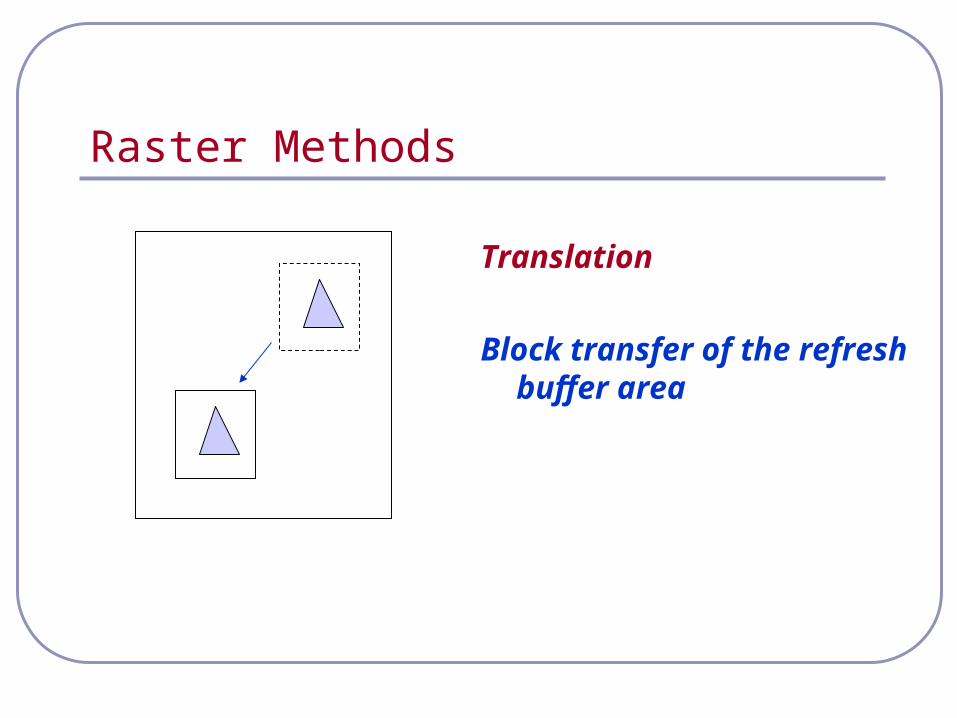
Raster Methods
Translation
Block transfer of the refresh buffer area
Raster Methods
Rotation
900 counterclockwise: 1. reverse pixel values in each row2. interchange rows and columns
1800: 1. reverse the order of elements in each row2. reverse the order of rows
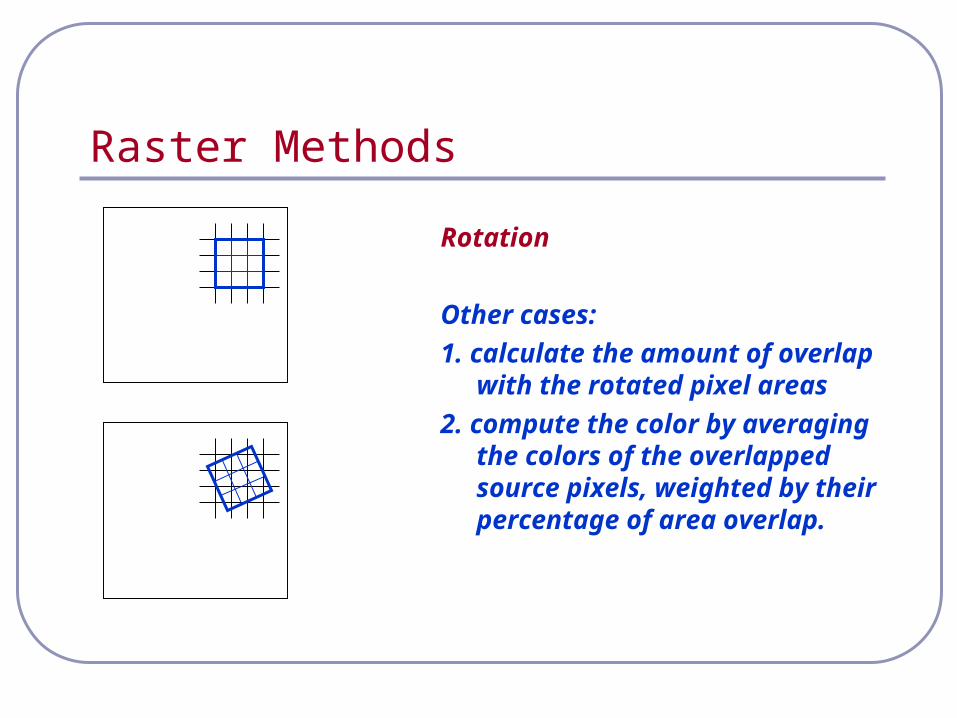
Raster Methods
Rotation
Other cases:
1. calculate the amount of overlap with the rotated pixel areas
2. compute the color by averaging the colors of the overlapped source pixels, weighted by their percentage of area overlap.
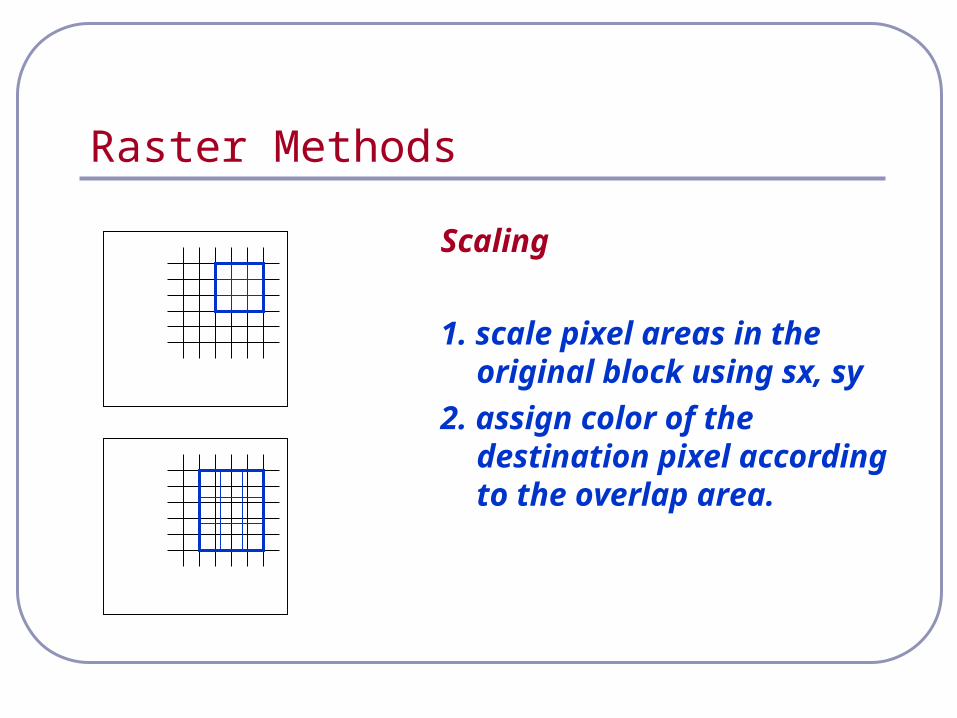
Raster Methods
Scaling
1. scale pixel areas in the original block using sx, sy
2. assign color of the destination pixel according to the overlap area.
Raster Methods
Reftection
1. reverse row and column values2. translate
Shear
Shift the position of array values along rows or columns
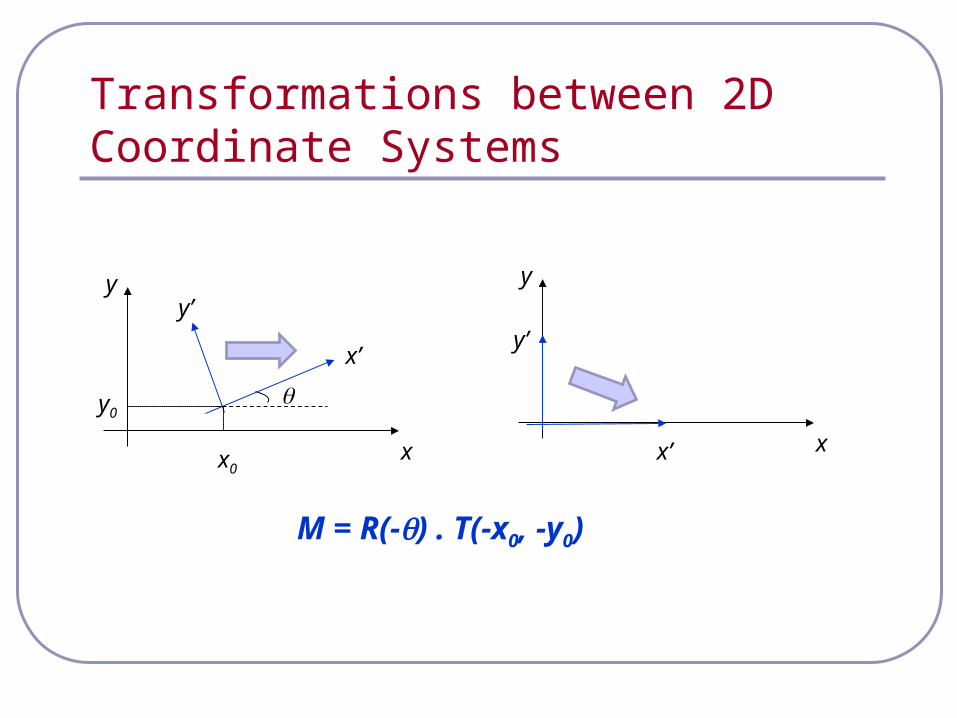
Transformations between 2D Coordinate Systems
x
y
y’
x’
y0
x0
x
y
y’
x’
M = R(-) . T(-x0, -y0)
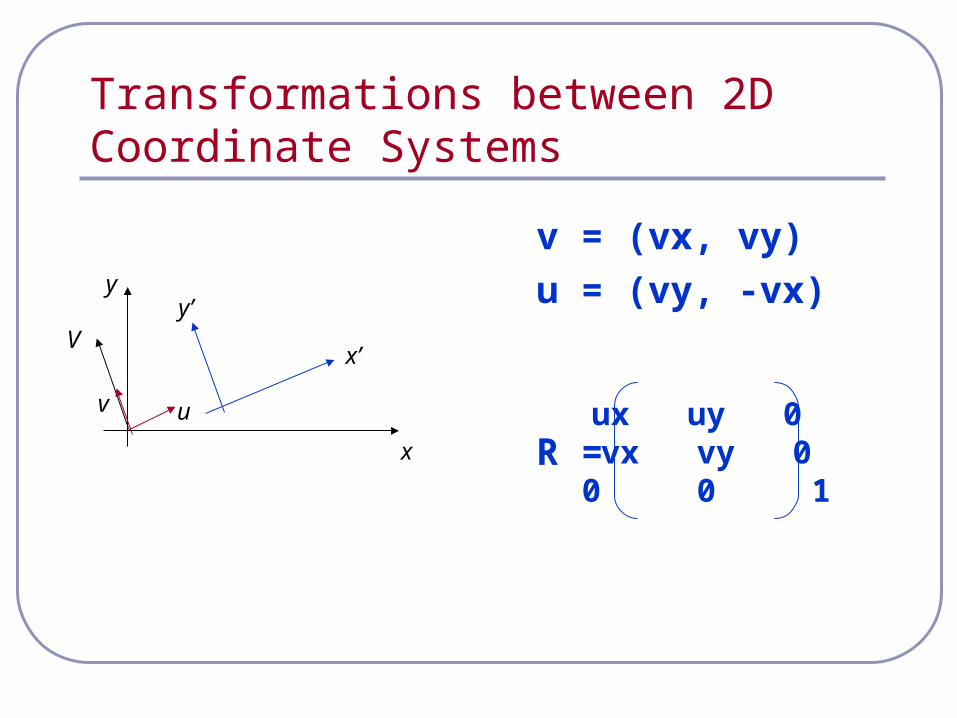
Transformations between 2D Coordinate Systems
x
yy’
x’
v
V
v = (vx, vy)
u = (vy, -vx)
R = u ux uy 0
vx vy 00 0 1
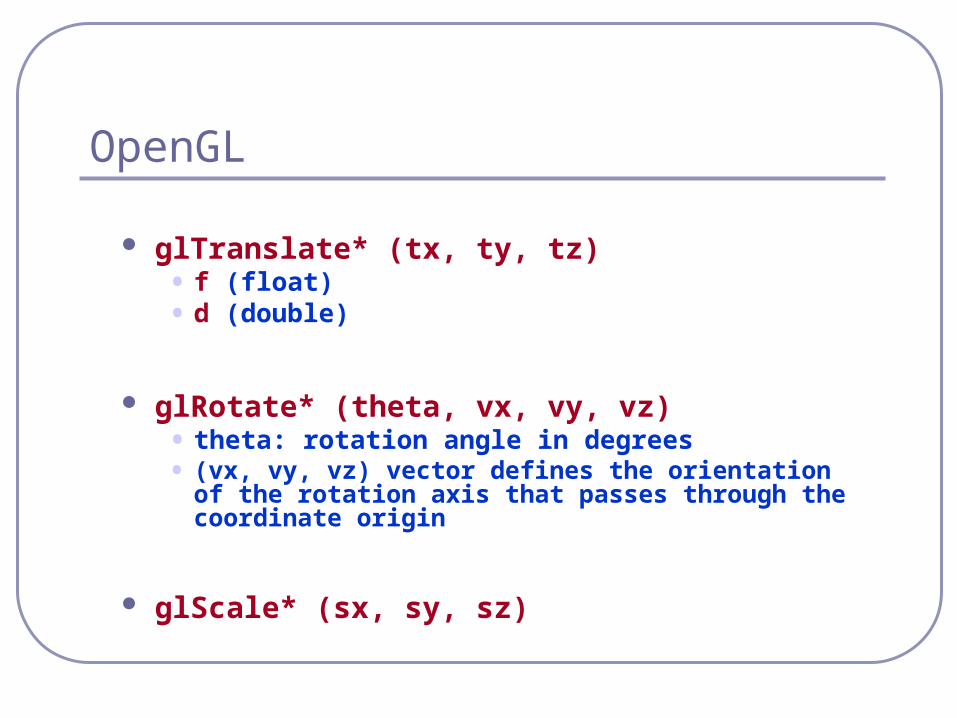
OpenGL
glTranslate* (tx, ty, tz)• f (float)• d (double)
glRotate* (theta, vx, vy, vz)• theta: rotation angle in degrees• (vx, vy, vz) vector defines the orientation of the
rotation axis that passes through the coordinate origin
glScale* (sx, sy, sz)
OpenGL
glMatrixMode(GL_MODELVIEW);
glLoadIdentity ( );
glMultMatrixf(M2);
glMultMatrixf(M1);
/* M = M2 . M1 */
OpenGL glMatrixMode(GL_MODELVIEW)• sets up the matrix for transformations (4x4 modelview
matrix)
glLoadIdentity ( )• assigns identity matrix to the current matrix
glLoadMatrix*(16-element array)• assigns a 16-element array (in column major order) to the
current matrix
glMultMatrix*(16-element array)• postmultiplies a 16-element array (M’) with the current
matrix (M) : M ← M.M’
OpenGL
Matrix Stack
Top matrix on the stack is the “current matrix” Initially stack contains identity matrix Maximum stack depth is 32 glGetIntegerv (GL_MAX_MODELVIEW_STACK_DEPTH, stackSize)• returns the number of positions available in the modelview stack
glGetIntegerv (GL_MODELVIEW_STACK_DEPTH, numMats)• returns the number of matrices currently in the stack
glPushMatrix()• copies the current matrix at the top of the stack
glPopMatrix()• destroys the matrix at the top of the stack
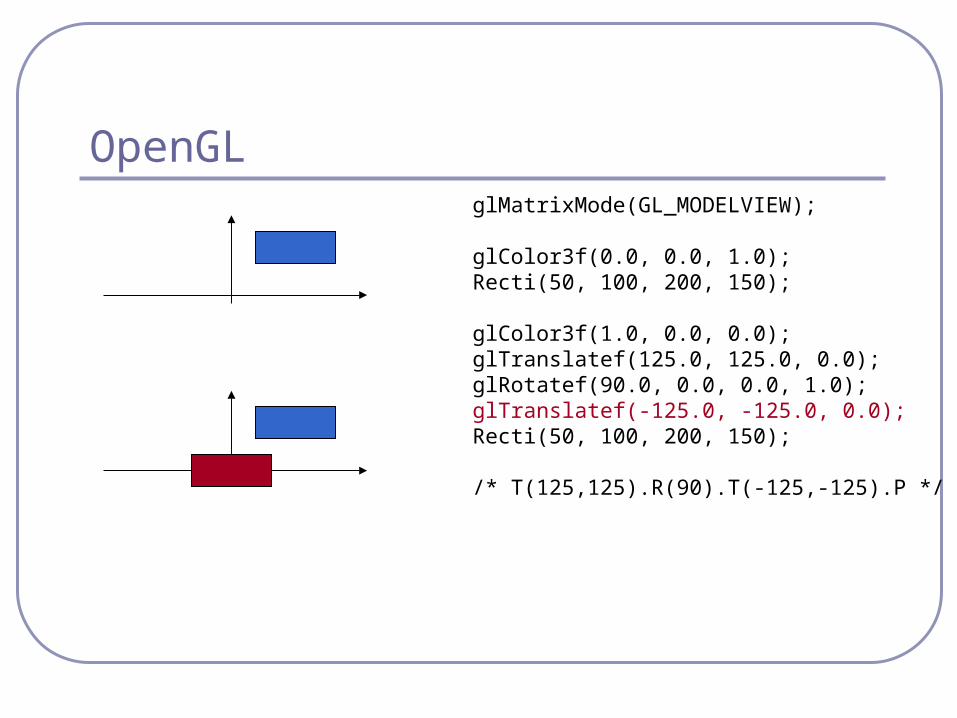
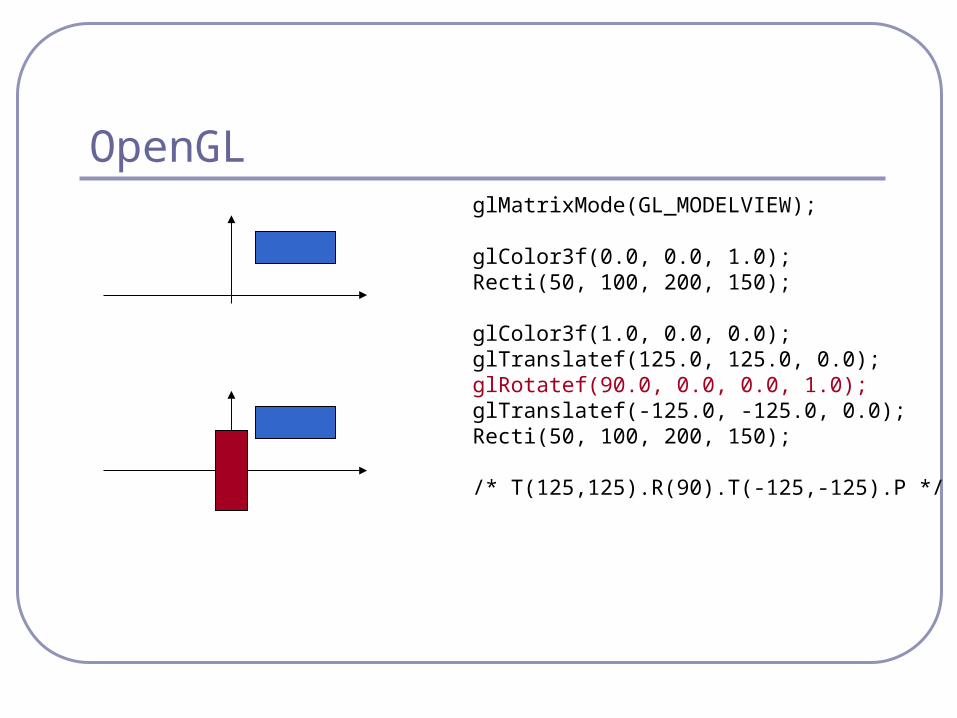
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(125.0, 125.0, 0.0);glRotatef(90.0, 0.0, 0.0, 1.0);glTranslatef(-125.0, -125.0, 0.0);Recti(50, 100, 200, 150);
/* T(125,125).R(90).T(-125,-125).P */
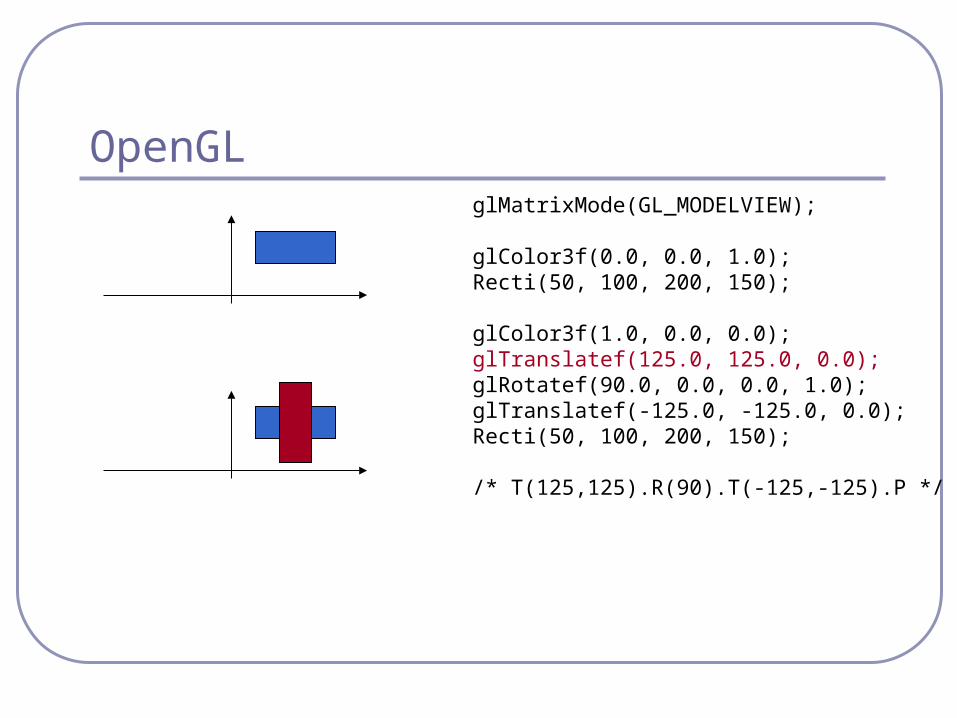
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(125.0, 125.0, 0.0);glRotatef(90.0, 0.0, 0.0, 1.0);glTranslatef(-125.0, -125.0, 0.0);Recti(50, 100, 200, 150);
/* T(125,125).R(90).T(-125,-125).P */
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(125.0, 125.0, 0.0);glRotatef(90.0, 0.0, 0.0, 1.0);glTranslatef(-125.0, -125.0, 0.0);Recti(50, 100, 200, 150);
/* T(125,125).R(90).T(-125,-125).P */
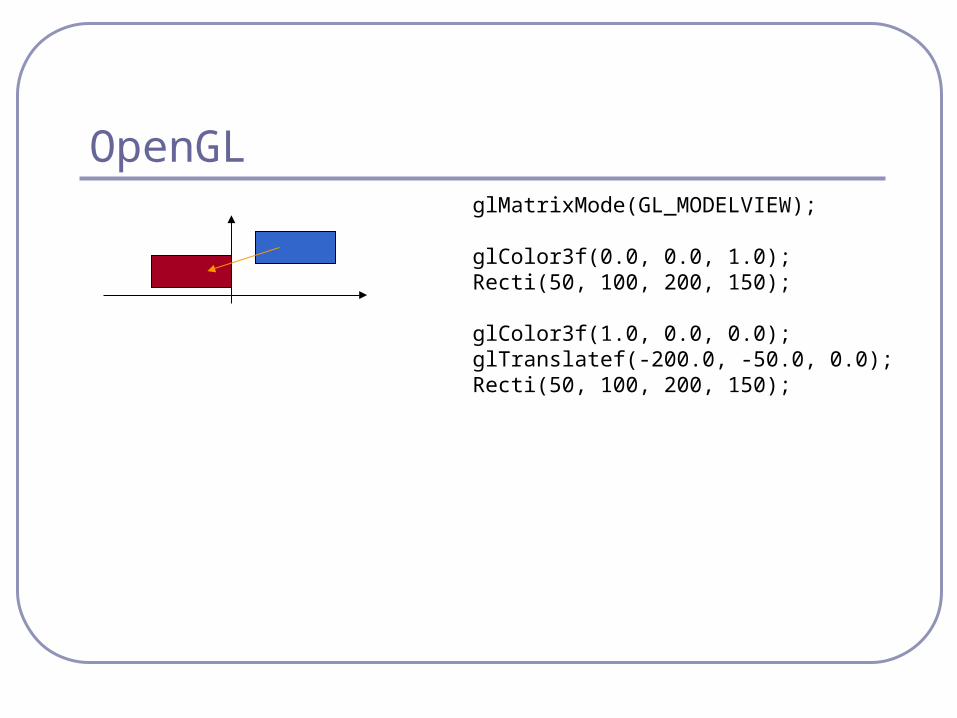
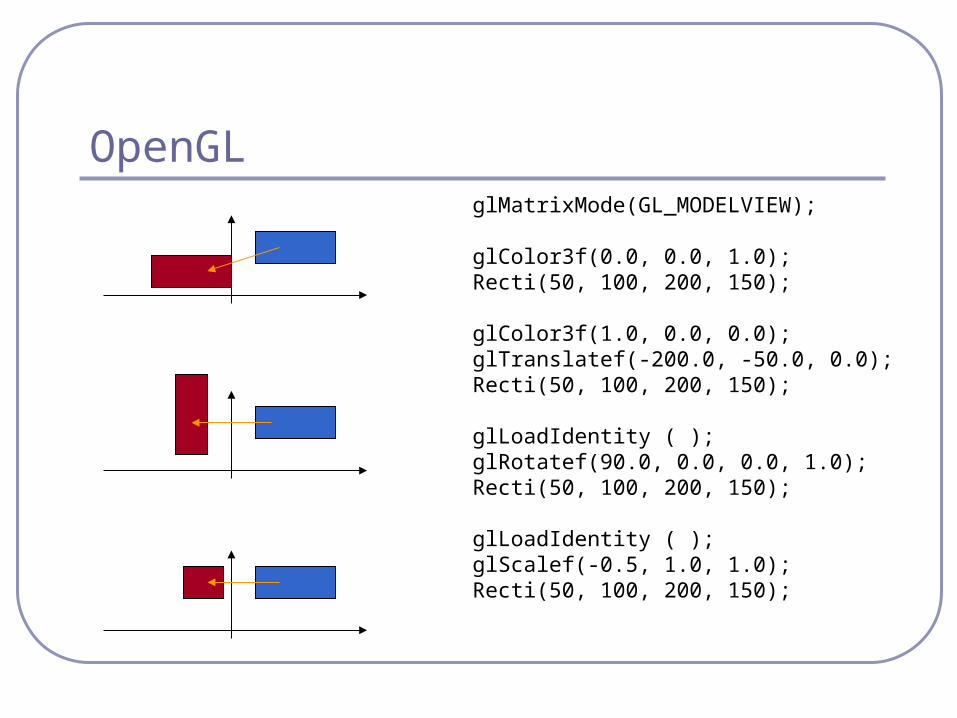
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(-200.0, -50.0, 0.0);Recti(50, 100, 200, 150);
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(-200.0, -50.0, 0.0);Recti(50, 100, 200, 150);
glLoadIdentity ( ); glRotatef(90.0, 0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
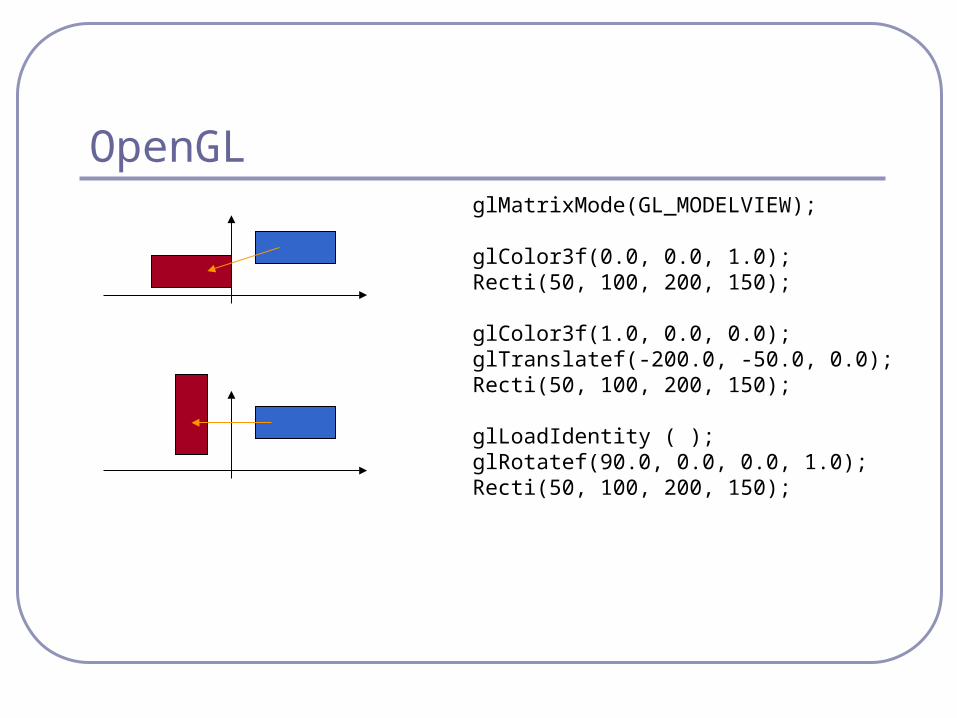
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glColor3f(1.0, 0.0, 0.0);glTranslatef(-200.0, -50.0, 0.0);Recti(50, 100, 200, 150);
glLoadIdentity ( ); glRotatef(90.0, 0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glLoadIdentity ( );glScalef(-0.5, 1.0, 1.0);Recti(50, 100, 200, 150);
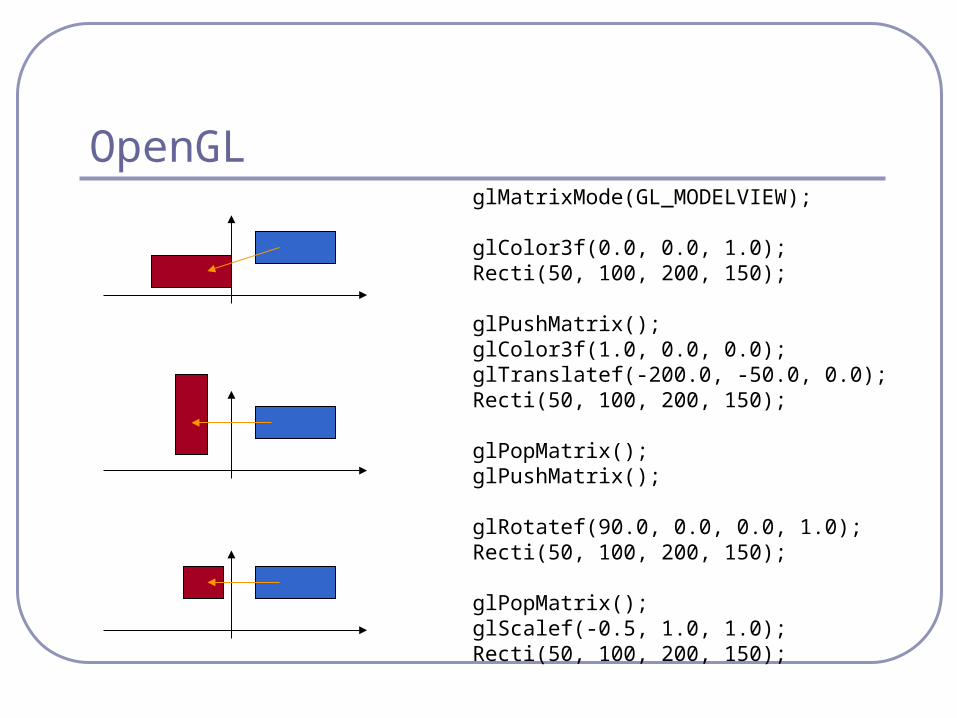
OpenGL glMatrixMode(GL_MODELVIEW);
glColor3f(0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glPushMatrix();glColor3f(1.0, 0.0, 0.0);glTranslatef(-200.0, -50.0, 0.0);Recti(50, 100, 200, 150);
glPopMatrix();glPushMatrix();
glRotatef(90.0, 0.0, 0.0, 1.0);Recti(50, 100, 200, 150);
glPopMatrix();glScalef(-0.5, 1.0, 1.0);Recti(50, 100, 200, 150);






![MATH 318 Mathematical LogicFix p 2P, if x 2p, then [x] E = p. If yEx, then 9p02P with x,y 2p0, but p \p062˘. Since x 2p \p0, so p = p0, hence y 2P. This shows [x] E p. 9 Conversely](https://img.pdfslide.us/doc/110x75/612058be3e994e1c8d1f205a/math-318-mathematical-logic-fix-p-2p-if-x-2p-then-x-e-p-if-yex-then-9p02p.jpg)
![ParallelMachineLearningUsingConcurrencyControl · p˘Beta 1 + Xn i=1 y i;1 + n Xn i=1 y i! (2.12) [x i (q;y 1;:::;y n)] x i ˘Bernoulli(q) (2.13) T p(; ) = p W p= fpg (2.14) T x i](https://img.pdfslide.us/doc/110x75/5fcca910d2792511343d7ae3/parallelmachinelearningusingconcurrencycontrol-pbeta-1-xn-i1-y-i1-n-xn-i1.jpg)



![Review - biostat.wisc.edukbroman/teaching/stat371/notes08.pdfStandard deviation (SD) : SD( X ) = p P x[x - E(X) ]2 p(x) Let Y = a + b X where a and b are numbers. Then Y is a random](https://img.pdfslide.us/doc/110x75/5ecb900083666203cf1d9f13/review-kbromanteachingstat371notes08pdf-standard-deviation-sd-sd-x-.jpg)











![arxiv.org · 8 T 0(PUXY ) , n Pe UXY ∈ P(U ×X ×Y) : PeUX = PUX, Pe Y = PY ,EPe[logq(X,Y )] ≥ EP [logq(X,Y)] o (49) T 1(PUXY ) , n Pe UXY ∈ P(U ×X ×Y) : PeUX = PUX, Pe UY](https://img.pdfslide.us/doc/110x75/606ee1e48ff9574c445b8f83/arxivorg-8-t-0puxy-n-pe-uxy-a-pu-x-y-peux-pux-pe-y-py-epelogqxy.jpg)




