Embed Size (px)
Citation preview

R&DE (Engineers), DRDO
2D Theory of Elasticity
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
2D Theory of Elasticity

R&DE (Engineers), DRDO
Summary
� Field equations
� Boundary conditions
� Problem formulation
� Plane strain
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
2
� Plane strain
� Plane stress
� Airy’s stress function
� Axially loaded bar
� Pure bending of beam

R&DE (Engineers), DRDO
Introduction
� In principle all practical problems – 3D problems – very complex – difficult to handle
� Reasonable assumptions – bring down the complexity in the problem – reduces a
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
3
complexity in the problem – reduces a dimension => 2D problem
� 2D problems – two independent variables –static problem – three independent variables – dynamic problems
� Field variables, φ = φ(x, y, t)

R&DE (Engineers), DRDO
Introduction
� Field variable is independent of third dimension =>
� Continuum approach – the following laws hold good
0=∂∂
z
φ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
4
hold good� Conservation of mass
� Principle of momentum
� Principle of moment of momentum
� First law of thermodynamics
� Second law of thermodynamics - inequality

R&DE (Engineers), DRDO
Introduction
� No inertia effects – quasi-static / static
� Small deformation and rotations
� Material => isotropic – same properties in all the direction
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
5
the direction
� Homogeneous – material properties are uniform over the domain
� Linear elastic – Hooke’s law holds good => Hookean material

R&DE (Engineers), DRDO
Field equations
� Strain-displacement equations
( )jijii
j
j
iij uu
x
u
x
u,,2
1
2
1 +=
∂∂
+∂∂=ε
Six equation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
6
� Compatibility equations
0,,,, =−−+ ikjljlikijklklij εεεε
Six equation
Six equations – three independent

R&DE (Engineers), DRDO
Field equations
� Equilibrium equations –
� Constitutive law – Linear elastic – Hooke’s
0, =+ ijij BσThree equations
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
7
� Constitutive law – Linear elastic – Hooke’s law
ijkkijij
ijijkkij
EEδσυσυε
µεδλεσ
−+=
+=
1
2
Six equations

R&DE (Engineers), DRDO
Field equations
� Total – 15 equations = 3 Equilibrium + 6 strain displacement + 6 constitutive laws
� Unknowns => 3 Displacements, 6 stress components and 6 strain components
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
8
components and 6 strain components
� Boundary value problem casted as
( ) 0 , , , , , =ℑ iijiji Bu µλσεUnknowns Lame’s constants
Body load
Not easy to solve analytically 15 equations to find out 15 unknowns

R&DE (Engineers), DRDO
Boundary conditions
� Solution of a differential (partial) equations –boundary conditions required
� Boundary conditions influence the solution –field variable in the domain
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
9
field variable in the domain
� BCs play a very essential role for properly formulating and solving elasticity problems
� In elasticity – boundary conditions –displacements, tractions and combination

R&DE (Engineers), DRDO
Boundary conditions
Various boundary conditions in elasticity –Tn
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
10
Tn
Traction boundary conditions
U
Displacement boundary conditions
U
Mixed boundary conditions

R&DE (Engineers), DRDO
Boundary conditions
� Tractions –
A
σyy
σxx
τxy
σyy
At ‘A’ – Direction cosines of area normal => (0, 1, 0)
σxx is inside the boundary – this need not be zero
T = τ ; T = σ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
11
σxx
x
y
B
σyy
τxy
Tx = τxy; Ty = σyy
At ‘B’ – Direction cosines of area normal => (1, 0, 0)
Tx = σxx; Ty = τxy
σyy is inside the boundary – this need not be zero
yyxyy
xyxxx
mlT
mlT
σττσ
+=
+=

R&DE (Engineers), DRDO
Boundary conditions
� Tractions –
A
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
12
Br
θ
Tractions in Polar co-ordinate system

R&DE (Engineers), DRDO
Boundary conditions
� Tractions –
y
1
Boundary – 1– traction free
DC => (0, 1, 0)
Tx = 0. σxx + 1. τxy = 0
⇒Tx = τxy = 0
⇒Ty = 0. τxy + 1. σyy = 0 => σyy = 0
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
13
x
2
3
4 S
⇒Ty = 0. τxy + 1. σyy = 0 => σyy = 0
Boundary – 2– DCs (1, 0, 0)
Tx = 1. σxx + 0. τxy = S = σxx
Ty = 1. τxy + 0. σyy = 0 = τxy
Boundary – 3– DCs (0, -1, 0) Tx = 0. σxx - 1. τxy = 0Tx = τxy = 0Ty = 0. τxy - 1. σyy = 0 => σyy = 0
Boundary – 4
u = 0; v = 0

R&DE (Engineers), DRDO
Boundary conditions
� Tractions Boundary - 1– DCs (l, m, 0)
This is a traction free boundary
Tx = lσxx + m τxy = 0
Ty = mσxx + l τxy = 0
y
n
DCs are constant on this boundary
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
14
Boundary – 2– Constrained boundary – U, V = 0
Boundary – 3- Traction is acting
DCs (-1, 0, 0)Tx = -1σxx + m τxy = S => σxx = - S
Ty = mσxx + l τxy = 0 => τxy = 0
x
n
σyy
τxy
σxx
o
1
2
3S
Individual stress components are not zero on boundary - 1

R&DE (Engineers), DRDO
Problem formulation
� 3D elasticity 15 equations and 15 unknowns - 2D elasticity – 8 equations and 8 unknowns
� Reformulating elasticity problems – mathematically convenient way
� Two approaches –
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
15
� Two approaches –� Displacement based � Stress based formulations
� Displacement based – express filed equation in terms of displacements, ui – Navier equation
� Stress based – express filed equation in terms of stresses, σij

R&DE (Engineers), DRDO
Problem formulation
� In displacement based formulation� Primary variable – displacement – solution is
obtained for displacements – stresses and strains secondary / derived variables
� Strains – derivation of displacements
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
16
� Strains – derivation of displacements� Stresses – use constitutive law
� In stress based formulation� Primary variable – stresses – solution is obtained
for stresses – strains and displacements secondary variables
� Strain compatibility equations

R&DE (Engineers), DRDO
Displacement formulation
� Governing equation expressed in displacements
� Field equations –
(1) - 0 mEquilibriu , =+ ijij Bσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
17
(1) - 0 mEquilibriu , =+ ijij Bσ
(2) - 2
1nt displaceme-Strain
∂∂
+∂∂=
i
j
j
iij x
u
x
uε
(3) - 2 law veConstituti ijijkkij µεδλεσ +=

R&DE (Engineers), DRDO
Displacement formulation
� Differentiate (3) wrt ‘j’
(4) - 2 ,,, jijijjkkjij µεδλεσ +=Plug this in (1)
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
18
(5) - 0 2 ,,, =++=+ ijijijjkkijij BB µεδλεσExpress all strain components in (5) in terms of displacements – Use equation (2)
( )0
0
,,,
,,,
=+++
=+++
ijjijijkik
iijjjjiijkjk
Buuu
Buuu
µµλµδλ

R&DE (Engineers), DRDO
Displacement formulation
( ) 0
0
,,
,,,
=+++
=+++
ijjijij
ijjijijkik
Buu
Buuu
µµλµµλ
This gives three equations for i = 1, 2 and 3
For i = 1 => x - direction
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
19
For i = 1 => x - direction
( ) 01123
2
22
2
21
2
3
3
2
2
1
1
1
=+
∂∂+
∂∂+
∂∂+
∂∂+
∂∂+
∂∂
∂∂+ Bu
xxxx
u
x
u
x
u
xµµλ
Combining all three equations into a single equation
( ) ( ) 0. ~~
2
~=+∇+∇∇+ BUU µµλ

R&DE (Engineers), DRDO
Displacement formulation
� Governing equations in terms of displacements – three equations - reduced from ’15’ equations
( ) (U) - 0,, =+++ ijjijij Buu µµλ( ) 0 , , , =ℑ Bu µλ Navier equation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
20
Equations (U) known as Navier’s or Lame’s equations
Boundary conditions => ui = U i on ‘S’ boundary
Solve second order PDEs – get displacements
Use strain – displacement relations for calculating strains
Constitutive relations for stresses
( )321 , , xxxuu ii =
( ) 0 , , , =ℑ ii Bu µλ Navier equation

R&DE (Engineers), DRDO
Stress formulation
� In displacement formulation compatibility equations play no role – displacement obtained are single valued and continuous
� In stress formulation express governing equation in terms of stresses
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
21
equation in terms of stresses� Stresses – primary variables – obtain
secondary variables displacements from strain-displacement relations
� Integrate ε-U relations – compatibility equations come into play

R&DE (Engineers), DRDO
Stress formulation
� Boundary conditions – only tractions
� From the filed equations eliminate strains and displacements
� Compatibility equation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
22
� Compatibility equation
ijkkijij EEδσυσυε −+= 1
(1) - 0,,,, =−−+ ikjljlikijklklij εεεε
Constitutive law
Differentiate this wrt k and l, plug in (1)
For k = l first three compatibility equations are obtained

R&DE (Engineers), DRDO
Stress formulation
� Three compatibility equations for k=l = 1, 2 and 3
2
2
2
2
2
∂∂∂
=∂
∂+
∂∂
yxxyxyyyxx
γεε
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
23
2) ,1( ====∂∂∂∂
lkji
yxxy
( )1 ,3
2
2
2
2
2
====∂∂
∂=∂
∂+∂
∂
lkjizxxzxzzzxx γεε ( )3 ,2
2
2
2
2
2
====∂∂
∂=
∂∂+
∂∂
lkji
zyyzyzzzyy γεε

R&DE (Engineers), DRDO
Stress formulation
This gives –
( )jkikmmikjkmmkkijmmijkkmm
ikjkjkikijkkkkij
−−++
=−−+
,,,,
,,,,
1δσδσδσδσ
υυ
σσσσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
24
ijij
ijij
kk
B
B
−=
=+=
+
,
, 0 eqn. mequilibriu
31
σσ
δυ
Make use of equilibrium equation to reduce further

R&DE (Engineers), DRDO
Stress formulation
Governing equation in terms of stress –
ijjiijkkmmijkkkkij BB ,,,,, 11
1 −−+
=+
+ δσυ
υσυ
σ
( ) 0 , , , =ℑ iij Bµλσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
25
Compatibility equation in terms of stresses, known as
“Beltrami-Michell” compatibility equation
Six equations can be obtained for i, j = 1, 2, 3
Only three are independent – similar to strain compatibility equations
Three more equations are required – complemented by three equilibrium equations - Six unknowns – six equations
( ) 0 , , , =ℑ iij Bµλσ

R&DE (Engineers), DRDO
Plane strain
� Out-of-plane dimensions are large compared to in-plane dimensions
y
All loads and boundary conditions independent of ‘z’ co-ordinate
The deformation in ‘z’ direction assumed to be zero. w = 0
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
26
x
z
assumed to be zero. w = 0
Deformations in ‘x’ and ‘y’ directions depend on (x, y)only
u = u(x, y)and v = v(x, y)
All cross-sections have same displacements
Out of plane strains vanishReduce a 3D problem to 2D problem

R&DE (Engineers), DRDO
Plane strain
� In plane strain εzz= 0, γyz = 0 and γzx = 0
� Linear elastic material – Hooke’s law
( )ijijkkij
µεεελσµεδλεσ
++=
+= 2
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
27
( )( )
( )xyxyxy
yyxxzz
yyyyxxyy
xxyyxxxx
µγµετεελσ
µεεελσµεεελσ
==
+=
++=
++=
2
2
2

R&DE (Engineers), DRDO
Plane strain
� Equilibrium equations –
(1) - 0
0,
=+∂+∂
=+∂
∂+
∂∂
=+
xy
xxyxx
ijij
Byx
B
στ
τσ
σ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
28
(2) - 0=+∂
∂+∂
∂y
xxxy Byx
στ
Use constitutive law and strain-displacement equations in (1)
( )( ) ( )
02
02
=+
∂∂+
∂∂
∂∂+
∂∂+
∂∂+
∂∂
∂∂
=+∂∂+++
∂∂
x
ixyxxyyxx
Bx
v
y
u
yx
u
y
v
x
u
x
Byx
µµλ
µγµεεελ

R&DE (Engineers), DRDO
Plane strain
( ) 02 =+
∂∂+
∂∂
∂∂++∇ xB
y
v
x
u
xu µλµ
Governing equation in x – direction
Use second equilibrium equation – convert to displacements
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
29
( ) 02 =+
∂∂+
∂∂
∂∂++∇ yB
y
v
x
u
yv µλµ
In each of the above two equations, equilibrium, constitutive law and displacement – strain equations are inbuilt -Displacement formulation
Eight equations => reduced to two equations in displacements

R&DE (Engineers), DRDO
Plane strain
� Stress based formulation -In 2D case, compatibility equation
Use constitutive law – convert into stresses
yxxyxyyyxx
∂∂∂
=∂
∂+
∂∂ γεε 2
2
2
2
2
( )xx σσυσε +−=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
30
( )
( )
( ) ( )( )
xyxy
yyxxzzyyxxzz
zz
zzxxyy
yy
zzyyxx
xx
E
EE
EE
EE
τυγ
σσυσσσυσε
σσυσε
σσυσε
+=
+==>+−==
+−=
+−=
12
0

R&DE (Engineers), DRDO
Plane strain
� Compatibility equation in terms of stresses
( )[ ] ( )[ ]yxyxxy
yyxxxxyy ∂∂∂
=−−∂∂+−−
∂∂ τ
υσσυυσσυ2
2
2
2
2
211
Above equation is obtained from compatibility, constitutive
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
31
Above equation is obtained from compatibility, constitutive equations
Use equilibrium equations to eliminate shear stress from above equation
0y
0
0 0
=
+
∂∂
+∂
∂∂∂=>=+
∂∂+
∂∂
=
+
∂∂
+∂
∂∂∂=>=+
∂∂
+∂
∂
yyyxy
yxxxy
xxyxx
xxyxx
Byx
Byx
Byxx
Byx
στστ
τστσ
Add

R&DE (Engineers), DRDO
Plane strain
This is obtained as –
∂∂
+∂
∂+∂
∂+
∂∂−=
∂∂∂
=∂
∂+
∂∂+
∂∂∂
+∂
∂+
∂∂
y
B
x
B
yxyx
y
B
x
B
yxyx
yxyyxxxy
yxxyyyxx
2
2
2
22
2
2
2
2
2
2
02
σστ
τσσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
32
∂+
∂+
∂+
∂−=
∂∂ yxyxyx 222
( )[ ] ( )[ ]
∂∂
+∂
∂+∂
∂+
∂∂−=−−
∂∂+−−
∂∂
y
B
x
B
yxyxyxyyxx
yyxxxxyy 2
2
2
2
2
2
2
2
11σσυσσυυσσυ
Simplifying this expression
( )
∂∂
+∂
∂−
−=+∇y
B
x
B yxyyxx υ
σσ1
12
Single governing equation for stress based formulation of plane strain problems

R&DE (Engineers), DRDO
Plane strain
� Governing equation
( )
∂∂
+∂
∂−
−=+∇y
B
x
B yxyyxx υ
σσ1
12
In this equation, equilibrium, constitutive and compatibility equations are inbuilt.
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
33
equations are inbuilt.
Three stress components in 2D –σxx, σyy, τxx
Only one governing equation – three unknowns
In 2D two stress equilibrium equations exist – use these two with above governing equation
Boundary conditions given in terms of tractions. Relate them to stresses

R&DE (Engineers), DRDO
Plane stress
� Third dimension – much smaller than in-plane dimensions Out of plane stresses σzz, τxz and
τyz negligible
Body can have out of plane deformation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
34
x
yz
deformation
εzz is non-zero, γxz and γyz = 0
Stresses are functions of in-plane displacements
Thin plates – structures
Reducing a 3D problem to a 2D problem
( )( )( )yx
yx
yx
xyxy
yyyy
xxxx
,
, ,
, ,
ττσσσσ
=
==

R&DE (Engineers), DRDO
Plane stress
� Formulation of plane stress problem – two approaches � Displacement based
� Stress based approach
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
35
� Formulation procedure – same as in plane strain
� Formulation takes care of non-zero out of normal strain and zero normal stress
� Use field equations

R&DE (Engineers), DRDO
Plane stress
� Displacement based approach –
( ) ( )
−−=
xy
y
x
xy
y
xE
γεε
νν
ν
ντσσ
2
100
01
01
1 2
Plug in stress equilibrium equations
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
36
xyxy
2
0 ; 0 =+∂
∂+∂
∂=+
∂∂
+∂
∂y
xxxyx
xyxx Byx
Byx
σττσ
( ) 01211 22
=+
∂∂+
∂∂
+∂∂+
−+
−∂∂
xyyxx Bx
v
y
uE
y
EE
x υε
υυε
υ
( ) 01211 22
=+
∂∂+
∂∂
+∂∂+
−+
−∂∂
yxxyy Bx
v
y
uE
x
EE
y υε
υυε
υ

R&DE (Engineers), DRDO
Plane stress
� Use strain displacement equations to convert strains into displacements
� Governing equations in terms of displacements
02 =+
∂+∂∂+∇ B
vuEuµ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
37
( )
( ) 012
012
2
2
=+
∂∂+
∂∂
∂∂
−+∇
=+
∂∂+
∂∂
∂∂
−+∇
y
x
By
v
x
u
y
Ev
By
v
x
u
x
Eu
υµ
υµ
In the above two equations – equilibrium, constitutive laws and strain-displacements equations

R&DE (Engineers), DRDO
Plane stress
� Stress based approach – field equations in plane stress problems
0=+∂
∂+
∂∂
xxyxx Byx
τσ
συσε −=
Constitutive laws
Equilibrium equations
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
38
0=+∂
∂+∂
∂y
xxxy Byx
στ
( )xyxy
xxyy
yy
yyxx
xx
E
EE
EE
τυγ
συσε
συσε
+=
−=
−=
12
yxxyxyyyxx
∂∂∂
=∂
∂+
∂∂ γεε 2
2
2
2
2
Compatibility equation

R&DE (Engineers), DRDO
Plane stress
� Use constitutive laws in compatibility equation –eliminate strains in compatibility using constitutive law
� Compatibility equation in terms of stress – stress compatibility equation
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
39
compatibility equation� Eliminate shear stress in stress compatibility
equation using two equilibrium equations� Differentiate x – direction equilibrium equation wrt
‘x’ – y – direction eqn. wrt ‘y’, add these two get shear stress
� Plug this in stress compatibility equation

R&DE (Engineers), DRDO
Plane stress
� The governing equation –
( ) ( )
∂∂+
∂∂+−=+∇
x
B
x
B xxyyxx υσσ 12
This is derived making use of strain compatibility equation,
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
40
This is derived making use of strain compatibility equation, constitutive laws and equilibrium equations

R&DE (Engineers), DRDO
Summary – Plane stress and strain
Formulation Plane strain Plane stress
Displacement( ) 02 =+
∂∂+
∂∂
∂∂++∇ xB
y
v
x
u
xu µλµ
( ) =+
∂+∂∂++∇ vuµλµ
( )
( ) 012
012
2
2
=+
∂∂+
∂∂
∂∂
−+∇
=+
∂∂+
∂∂
∂∂
−+∇
y
x
By
v
x
u
y
Ev
By
v
x
u
x
Eu
υµ
υµ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
41
Stress
( ) 02 =+
∂∂+
∂∂
∂∂++∇ yB
y
v
x
u
yv µλµ ( ) 0
12=+
∂
+∂∂−
+∇ yByxy
vυ
µ
( )
∂∂
+∂
∂−
−=+∇y
B
x
B yxyyxx υ
σσ1
12 ( ) ( )
∂∂+
∂∂+−=+∇
x
B
x
B xxyyxx υσσ 12

R&DE (Engineers), DRDO
Summary – Plane stress and strain
� Basic difference – coefficients involving elastic material constants
� Solving one type of plane problem gives solution to other type also using simple transformation of elastic coefficients
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
42
elastic coefficients� In absence of body loads – in stress formulation –
governing equations of plane stress and strain are same� No elastic constants appear in governing equation
� Solving these equations – difficult – some text book problems

R&DE (Engineers), DRDO
Airy’s stress function
� In stress based formulation – one equation in terms of normal stresses and two equilibrium equations for finding out the complete stress state
� Reduce the complexity of equations
� Introduce a new filed variable ‘Airy’s stress
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
43
� Introduce a new filed variable ‘Airy’s stress function’ (φ)
� Aim – reduce the governing equations from three to one
� Find the distribution of single variable ‘φ’ – get stresses from that

R&DE (Engineers), DRDO
Airy’s stress function
� Airy’s stress function (ASF) defined for stress based formulations – both plane stress and plane strain
� Basic stress equilibrium equations –
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
44
0
0
=+∂
∂+∂
∂
=+∂
∂+
∂∂
yxxxy
xxyxx
Byx
Byx
στ
τσ
Body loads can be derived from potential function ‘V’
Defining potential
y
VB
x
VB
VBVB
yx
ii
∂∂−=
∂∂−=
==>−∇=
,
,~
Substitute in equilibrium equations

R&DE (Engineers), DRDO
Airy’s stress function
Equilibrium equations become
( ) ( ) 0 ;0 =−∂∂+
∂∂
=∂
∂+−
∂∂
Vyxy
Vx yy
xyxyxx σ
ττσ
Defining ASF as
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
45
Defining ASF as
2
22
2
2
; ;x
Vyxy
V yyxyxx ∂∂=−
∂∂∂−=
∂∂=− φσφτφσ
ASF, φ = φ(x, y)
ASF satisfies both equilibrium equations.
In stress based formulation – it has to satisfy one more governing equation

R&DE (Engineers), DRDO
Airy’s stress function
� In plane strain – stress based formulation –governing equation
( )
VV
y
B
x
B yxyyxx
22
2
1
1
1
∂−∂+ ∂−∂−=
∂++
∂+∇
∂∂
+∂
∂−
−=+∇
φφ
υσσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
46
V
V
VVyx
y
V
yx
V
xxV
yV
24
222
2222
2
222
1
21
21
1.
1
12
1
1
∇
−−−=∇
∇
−−
=∇∇
∇−
=∇+
∂∂+
∂∂∇
∂∂−
∂∂+
∂∂−
∂∂
−−=
∂∂++
∂∂+∇
υυφ
υφ
υφφ
υφφ
Bi-harmonic operator

R&DE (Engineers), DRDO
Airy’s stress function
� In plane stress – stress based formulation –governing equation
( ) ( )y
B
x
B yxyyxx
22
2 1
∂∂ ∂∂ ∂ ∂
∂∂
+∂
∂+−=+∇
φφ
υσσ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
47
( )
( )
( )( ) V
V
VVyx
y
V
yx
V
xxV
yV
24
222
2222
2
222
1
21.
12
1
∇−−=∇∇−+=∇∇
∇+=∇+
∂∂+
∂∂∇
∂∂−
∂∂+
∂∂−
∂∂+−=
∂∂++
∂∂+∇
υφυφ
υφφ
υφφ

R&DE (Engineers), DRDO
Airy’s stress function
� Governing equations in terms of ASF
( ) stress Plane 1
strain Plane 1
21
24
24
V
V
∇−−=∇
∇
−−−=∇
υφυυφ
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
48
If body forces are neglected – V = 0 – In both cases the governing equation is same
0204
4
22
4
4
44 =
∂∂+
∂∂∂+
∂∂=>=∇
yyxx
φφφφ
Bi-harmonic equation – solution to this equation => ASF
Problem of elasticity reduced to a single equation – find φ in solution domain and boundaries – BCs - Tractions

R&DE (Engineers), DRDO
Stress formulation
� This formulation is appropriate for use with traction boundary conditions
� Use Hooke’s law for calculating strains from stresses
� Compute displacements from strain-displacement relations
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
49
relations� Since compatibility equations are used in
formulating governing equations, the displacements obtained from integration of strain-displacement equations yield single valued, continuous filed
� All equations are used for solving the problem� Closed form analytical solutions for elasticity
problems – difficult – rely on numerical methods

R&DE (Engineers), DRDO
Uniaxial tension – ASF approach
� A bar subjected to tension
x
y
2l
2c TT
12
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
50
Boundary – 1
DCs => (1, 0, 0)
Tx = T = lσxx + m τxy = σxx = T
Ty = 0 = mσyy + l τxy => τxy = 0
Boundary – 2
DCs => (-1, 0, 0)
Tx = -T = lσxx + m τxy = σxx = T
Ty = 0 = mσyy + l τxy => τxy = 0
Remaining boundaries – stress free.
Stress in x – direction = T = constant

R&DE (Engineers), DRDO
Uniaxial tension – ASF approach
Stress in x – direction given by ASF
212
2
2
2
1 constant cycTyT
yxx ++==>=∂∂== φφσ
At x = ± l, σyy and τxy = 0
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
51
(2) -
(1) -
E
T
y
v
EE
E
T
x
u
EE
xy
y
yx
x
υσυσε
συσε
−=∂∂=−=
=∂∂=−=
Integrate (1) and (2)
)(
)(
xgyE
Tv
yfxE
Tu
+−=
+=
υ
f(y) and g(x) –arbitrary functions

R&DE (Engineers), DRDO
Uniaxial tension – ASF approach
Shear strain, xy
xy
xgyf
xgyf
Gx
v
y
u
==−=>=+=>
==∂∂+
∂∂=
ω
τγ
)()(
0)()(
0
''
''
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
52
ooo
ooo
o
vxgx
g
uyfy
f
xgyf
+==>=∂∂
+−==>−=∂∂=>
==−=>
ωω
ωω
ω)()( ''
ωo, uo, vo – arbitrary constants of integration.

R&DE (Engineers), DRDO
Uniaxial tension – ASF approach
� Functions ‘f’ and ‘g’ represent rigid body motions
� Rigid body rotation -ωo and translations in ‘x’ and ‘y’ directions => uo and vo
� Terms related to rigid body motion result from strain-displacement relations
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
53
displacement relations
� Displacements are determined from strain fields only up to an arbitrary rigid motion
� For complete determination of displacement filed –additional boundary conditions required – evaluate ωo, uo and vo
� If rod has no rigid body motion => ωo, uo and vo = 0

R&DE (Engineers), DRDO
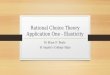
Pure bending of beam – ASF approach
� Beam subjected to pure bending –
x
y
2l
2c
M M
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
54∫
∫+
−
+
−
±=−
=±=
=±
=±
=±
c
c
xx
c
c
xxx
xy
xy
yy
ydyylM
dyylF
yl
cx
cx
),(
0),(
0) ,(
0) ,(
0) ,(
σ
σ
ττσ
Boundary
Conditions
Statically equivalent boundary condition

R&DE (Engineers), DRDO
Pure bending of beam – ASF approach
� Key point in ASF approach – selection of an appropriate stress function -φ
� It has to satisfy all boundary conditions –capture physics of the problem
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
55
capture physics of the problem
� Some knowledge about structure’s behavior helps in selection of ‘φ’� In bending, variation of bending stress is linear
along ‘y’ co-ordinate
� ‘φ’ should be a cubic polynomial

R&DE (Engineers), DRDO
Pure bending of beam – ASF approach
Linear variation of bending stress
213
2
2
6
CyC yA
yAyxx
++=
∂∂==
φ
φσ Integrating the function
ASF satisfies all BCs
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
56
216CyC y ++=φ ASF satisfies all BCs
( )
213
321
3
3
3
32
462
3
2
3
3
,
CyCyc
MCyC
y
c
M
c
MAM
yAMdyAy
Mydyyl
c
c
c
c
c
c
xx
++−=++−=
−==>=
−=>−=
−=±
+
−
+
−
+
−
∫
∫
φ
σ

R&DE (Engineers), DRDO
Pure bending of beam – ASF approach
� Stresses and strains
yc
M
yCyCy
c
M
xyyy
xx 32
2
213
3
0 ,0
2
3
4
τσ
φσφ
==
−=∂∂==>++−=
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
57
yEc
M
EE
yEc
M
x
u
EE
xxyyyy
yyxxxx
xyyy
3
3
2
3
2
3
0 ,0
υσυσ
ε
συσε
τσ
=−=
−=∂∂=>−=
==
Integrate strain –displacement equations
)(4
3 );(
2
3 233
xgyEc
Mvyfxy
Ec
Mu +=+−= υ

R&DE (Engineers), DRDO
Pure bending of beam – ASF approach
Shear strain
o
xy
yfxgxEc
M
xgyfxEc
M
x
v
y
u
=−=+−=>
=++−=>=∂∂+
∂∂=
ω
γ
Integrate )()(2
3
0)()(2
30
''3
''3
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
58
oo
oo
o
uyyf
vxx
Ec
Mxg
yfxgxEc
+−=
++=
=−=+−=>
ω
ω
ω
)(22
3)(
Integrate )()(2
2
3
3
Functions g(x) and f(y) represent rigid body motions
To evaluate constants, ωo, uo, vo – constraints required

R&DE (Engineers), DRDO
rd_
mec
h@
yah
oo
.co
.in
Ramadas Chennamsetti
59