Embed Size (px)
Citation preview

8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 1/6
Rohit Maurya, Dr. Shalini Singh, Dr. P.R Gupta, Manish Kumar Sharma
Centre for Development of Advance Computing
B-30, Institutional Area, Sector- 62, Noida, India
Email: [email protected]
Email: [email protected]
Email: [email protected]
Email: [email protected]
Abstract — In this paper we proposed the method for road
extraction. The road extraction involves the two main steps: the
detection of road that might have the other non road parts like
buildings and parking lots followed by morphological operationsto remove the non road parts based on their features. We used
the K-Means clustering to detect the road area and may be some
non road area. Morphological operations are used to remove the
non road area based on the assumptions that road regions are
an elongated area that has largest connected component.
Index Terms — K-Means clustering, morphological
operations, road extraction, segmentation.
I. INTRODUCTION
HE road extraction from digital images has drawn a
special attention in the last few decades. Numerousmethods has been developed which includes semi automatic
and automatic road extraction. Road extraction plays a very
important role in vehicle navigation system, urban planning,
disaster management system and traffic management system.
Semi automatic road extraction required requires user
interaction in order to extract the road where automatic
method requires no user interaction.
In existing method of road extraction various semi
automatic and automatic methods have been developed. Karin
K. Hedman, U. Stilla, G. Lisini, P. Gamba (2010) [1] has
used two road extractors one for rural areas and another for
urban areas. They used two steps for road extraction: first isline extraction followed by a smoothening and splitting step
and in another step linear features are evaluated on their
attributes using Bayesian probability theory. Hui Kong, J.-Y.
Audibert, J. Ponce (2010) [2] has developed the method based
upon the vanishing point associated with main part of road,
followed by the segmentation of the corresponding road area
based upon the detected vanishing point. Anil and Natarajan
(2010) [3] have developed the method based upon statistical
region merging [9] for image segmentation and road network
is
Figure 1. Roads in developing suburban area
extracted based upon skeleton pruning method based on
discrete curve evaluation. Yinghua He, Hong Wang, Bo
Zhang (2003) [4] has developed an algorithm composed of
the segmentation of the corresponding road area based upon
the detected vanishing point. Anil and Natarajan (2010) [3]have developed the method which uses statistical region
merging [9] for image segmentation and road is extracted
using skeleton pruning which is based on contour
partitioning. Yinghua He, Hong Wang, Bo Zhang (2003) [4]
has developed an algorithm consists of two major points:
boundaries are estimated based on the intensity image and
road areas are detected based on the full color image. Tomoko
Tateyama, Zensho Nakao, Xian Yan Zeng, Yen-Wei Chen
Road Extraction Using K-Means Clustering and
Morphological Operations
T
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 290
8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 2/6
(2004) [5] has proposed a method which combines color,
texture information and shape information for segmentation
of high resolution images and a new direction filter which
focuses on road features having information on specific
directionality. The method uses color and texture information
for global segmentation and shape information for local
analysis. Onur Tuncer (2007) [6] has proposed a method
which consists of preprocessing the image via the series of
wavelet based filter banks and reducing the yielding data into
a single image, then utilizing a fuzzy inference algorithm to
find road areas. H. Mayer, I. Laptev, A. Baumgartner and C.
Steger (1997) [7] has used ribbon snakes not only to extract
the roads eficiently, but also used to bridge gaps in the
extracted roads due to shadows created by building and trees.
Q. Zhang and I. Couloigner (2006) [8] has proposed a
method which starts with an image segmentation using a
spectral clustering algorithm. This step focuses on the
exploitation of the spectral information for feature extraction.
The road clusters are automatically identified using a fuzzy
classifier based on a set of predefined membership function
for road surface and the corresponding normalized digital
numbers in each multi spectral band. A number of shape
descriptors from the refined angular texture signature are
defined and used to reduce the misclassification between
roads and other spectrally similar objects such as parking lots,
building or crop field. Jalal (2006) [10] has proposed a
method comprise of two stages: feature extraction and fuzzy
modeling for road identification. In the first stage mean,
standard deviation, skewness and kutosis. In the fuzzy
modeling stage, the roads are identified based on converted
features to the specific fuzzy sets in the linguistic variables.
In this paper we use the K-Means clustering based
segmentation to find the road cluster followed by
morphological operations to filter the area which has similar
features as the road like buildings, parking lots and crop field.
II. METHODOLOGY
The flowchart of road extraction is given in figure 2. This
method includes four parts: segmentation using K-Means
clustering, road cluster identification, road cluster filtering
and result evaluation.
Figure 2. Flowchart of road extraction method
A. Image segmentation using K-Means clustering:
Clustering is method to group similar objects into one
cluster. K-means clustering [11] finds clusters such that
objects within each cluster are as close to each other as
possible, and as far from objects in other clusters as possible.
K-means clustering requires you to specify the number of
clusters to be partitioned and a distance metric to specify how
close two objects are to each other.
We used K-Means to cluster the objects into clusters using
the Euclidean distance metric and to segment the image in
various clusters.
K-means Clustering:
As described by Suman Tatiraju and Avi Mehta [14]
K-Means algorithm is an unsupervised clustering algorithm
that classifies the input set of data into multiple clusters based
on their distance from each other. Based on the distance
metric specified the algorithm tries to group the input data
into various clusters . The points are clustered around
centroids µi ∀ i = 1... k which are obtained by minimizing
the objective
k
V = Σ Σ (x j - µi)2
i=1 x j ϵ Si
where there are k clusters Si, i = 1, 2, . . . , k.
µi is the mean point of all the points x j ϵ Si.
The algorithm has following steps:
1. Compute the intensity distribution of the intensities.
2. Choose k centroids randomly.
3. Repeat the following steps until the cluster does not
change anymore.
4. Cluster the points based on distance of their intensities
from the centroid intensities.
c(i) := arg min || x(i) - µ j ||2
j
5. Compute the new centroid or mean point for each
clusters.
m
Σ 1{ c(i) = j } x(i)
µi := i=1
m
Input Image
Segmentation using K- Means clustering
Road cluster identification
Road cluster filtering
Result evaluation
Extracted roads
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 291

8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 3/6
Σ 1{ c(i) = j }i=1
Where k is the number of clusters to be found, i iterates over
the all the intensities, j iterates over all the centroids and µi
are the centroid intensities.
Figure 3. Segmented image with road cluster shown
in red
B. Road cluster identification:
After input image segmentation, we have three clusters as
an output so to make the approach fully automatic we should
know which cluster is the road cluster. Road cluster is need to
be identified because we need the right cluster in order to
extract the roads otherwise our result we cannot get the right
output.
To identify the road cluster we used the concept that road
usually appear as elongate regions. So the cluster which has
the longest connected component will be the road cluster.
Figure 4. Road cluster after segmentation
C. Road cluster filtering:
The road cluster which is obtained from the classification is
consists of roads, buildings, parking lots and other objects
which has similar feature like a road. Further processing is
needed in order to remove the non-road areas before road
extraction. In this work the road cluster filtering approach
Figure 5 Extracted Roads after refinement step
based on the concept that roads usually appear as elongated
areas while the object similar to the roads are usually open
areas.
In this step the following operations are performed.
1. Dilation- Dilation refers to expansion i.e. adds pixels to the
boundaries of objects in an image. We use dilation to fill the
any gaps between the road pixels so that we can perform the
next step efficiently.
2. Non road area removal - In this step we use the concept
that road regions are an elongated area that has largest
connected component and the building and other non road
has relatively lesser area and is not connected to road.
This step involves-
1. Find the connected components.2. Compute the area of each component.
3. Remove non road parts (small objects like building,
parking lots and other similar objects ).
D. Result evaluation:
The basic method of result evaluation is to compare the
results against a manually plotted, high quality reference
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 292
8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 4/6
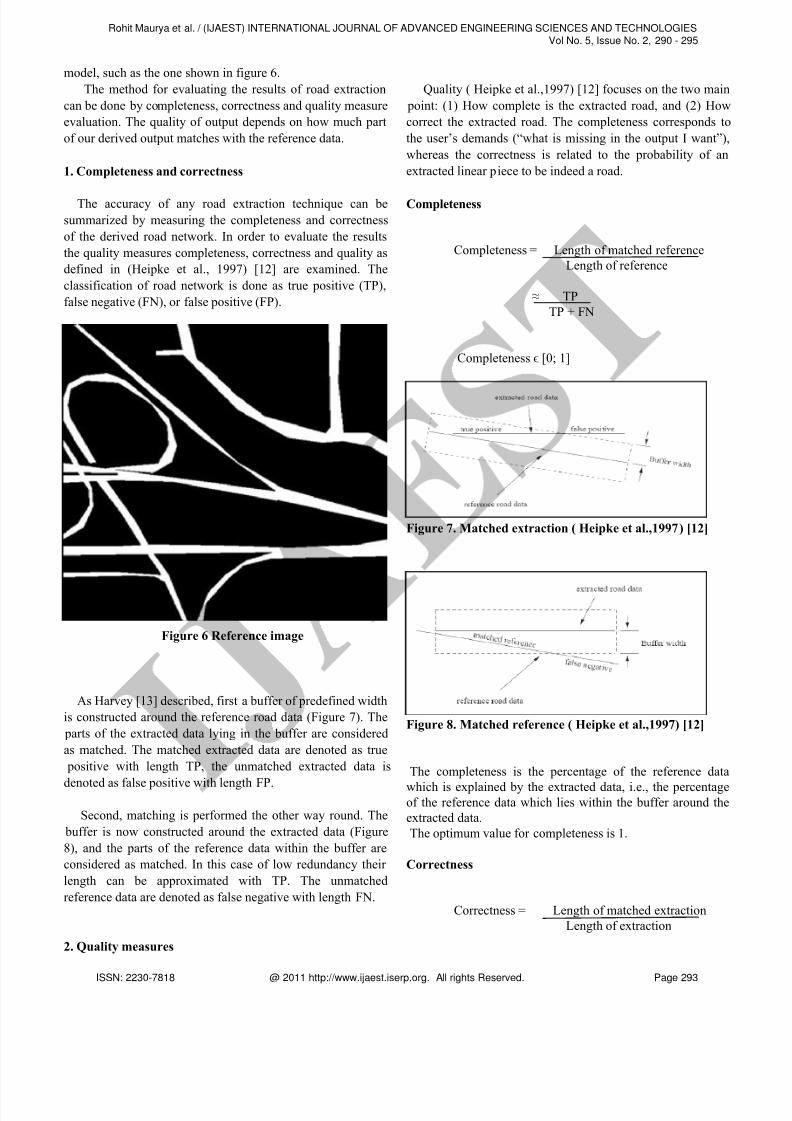
model, such as the one shown in figure 6.
The method for evaluating the results of road extraction
can be done by completeness, correctness and quality measure
evaluation. The quality of output depends on how much part
of our derived output matches with the reference data.
1. Completeness and correctness
The accuracy of any road extraction technique can be
summarized by measuring the completeness and correctness
of the derived road network. In order to evaluate the results
the quality measures completeness, correctness and quality as
defined in (Heipke et al., 1997) [12] are examined. The
classification of road network is done as true positive (TP),
false negative (FN), or false positive (FP).
Figure 6 Reference image
As Harvey [13] described, first a buffer of predefined width
is constructed around the reference road data (Figure 7). The
parts of the extracted data lying in the buffer are considered
as matched. The matched extracted data are denoted as true
positive with length TP, the unmatched extracted data is
denoted as false positive with length FP.
Second, matching is performed the other way round. The
buffer is now constructed around the extracted data (Figure
8), and the parts of the reference data within the buffer are
considered as matched. In this case of low redundancy their
length can be approximated with TP. The unmatched
reference data are denoted as false negative with length FN.
2. Quality measures
Quality ( Heipke et al.,1997) [12] focuses on the two main
point: (1) How complete is the extracted road, and (2) How
correct the extracted road. The completeness corresponds to
the user’s demands (“what is missing in the output I want”),
whereas the correctness is related to the probability of an
extracted linear piece to be indeed a road.
Completeness
Completeness = Length of matched reference
Length of reference
≈ TP
TP + FN
Completeness ϵ [0; 1]
Figure 7. Matched extraction ( Heipke et al.,1997) [12]
Figure 8. Matched reference ( Heipke et al.,1997) [12]
The completeness is the percentage of the reference data
which is explained by the extracted data, i.e., the percentageof the reference data which lies within the buffer around the
extracted data.
The optimum value for completeness is 1.
Correctness
Correctness = Length of matched extraction
Length of extraction
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 293
8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 5/6
≈ TP
TP + FP
Correctness ϵ [0; 1]
The correctness represents the percentage of correctly
extracted road data, i.e., the percentage of the extracted data
which lie within the buffer around the reference data.
The optimum value for correctness is 1.
Quality
Quality = Length of matched extraction
≈ TP
TP +FP+ FN
Quality ϵ [0; 1]
qq = length of extracted data + length of unmatchedreference
The quality is a measure of the “goodness” of the final result.
It takes into account the completeness of the extracted data
well as its correctness.
The optimum value for quality is 1.
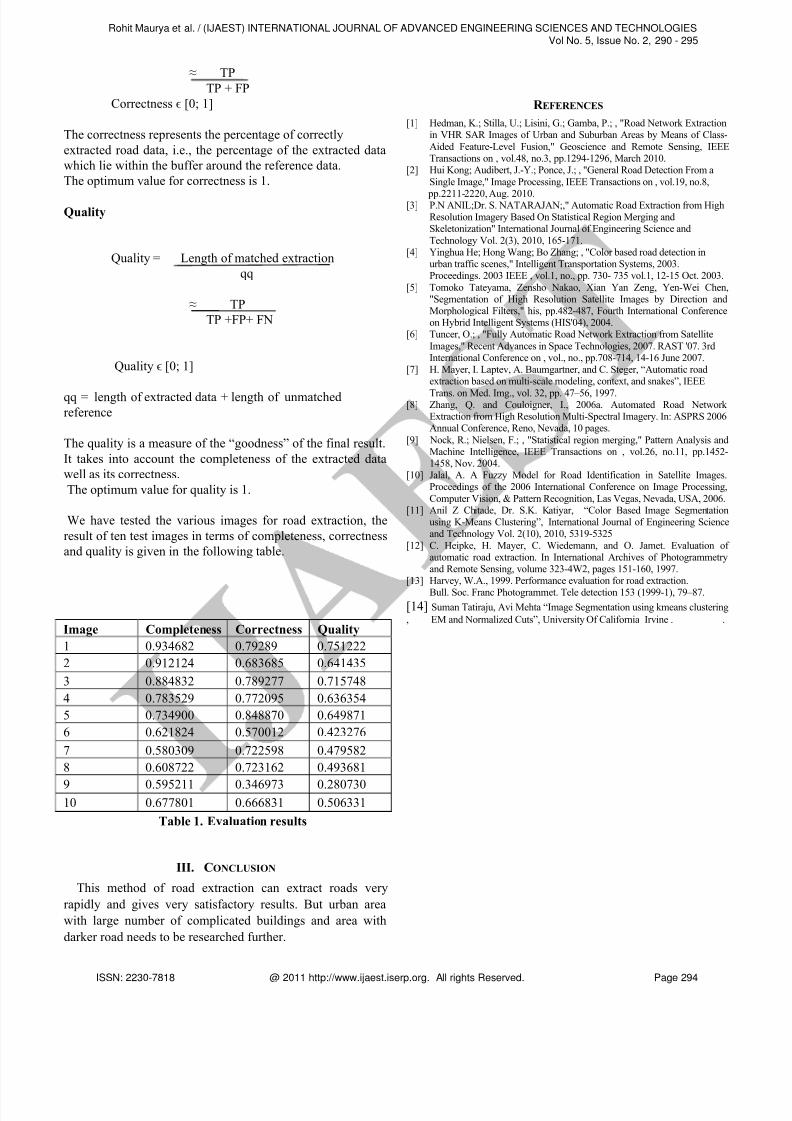
We have tested the various images for road extraction, the
result of ten test images in terms of completeness, correctness
and quality is given in the following table.
Image Completeness Correctness Quality
1 0.934682 0.79289 0.751222
2 0.912124 0.683685 0.641435
3 0.884832 0.789277 0.715748
4 0.783529 0.772095 0.636354
5 0.734900 0.848870 0.649871
6 0.621824 0.570012 0.423276
7 0.580309 0.722598 0.479582
8 0.608722 0.723162 0.493681
9 0.595211 0.346973 0.28073010 0.677801 0.666831 0.506331
Table 1. Evaluation results
III. CONCLUSION
This method of road extraction can extract roads very
rapidly and gives very satisfactory results. But urban area
with large number of complicated buildings and area with
darker road needs to be researched further.
R EFERENCES
[1] Hedman, K.; Stilla, U.; Lisini, G.; Gamba, P.; , "Road Network Extractionin VHR SAR Images of Urban and Suburban Areas by Means of Class-
Aided Feature-Level Fusion," Geoscience and Remote Sensing, IEEETransactions on , vol.48, no.3, pp.1294-1296, March 2010.
[2] Hui Kong; Audibert, J.-Y.; Ponce, J.; , "General Road Detection From a
Single Image," Image Processing, IEEE Transactions on , vol.19, no.8,
pp.2211-2220, Aug. 2010.[3] P.N ANIL;Dr. S. NATARAJAN;," Automatic Road Extraction from High
Resolution Imagery Based On Statistical Region Merging andSkeletonization" International Journal of Engineering Science and
Technology Vol. 2(3), 2010, 165-171.[4] Yinghua He; Hong Wang; Bo Zhang; , "Color based road detection in
urban traffic scenes," Intelligent Transportation Systems, 2003.Proceedings. 2003 IEEE , vol.1, no., pp. 730- 735 vol.1, 12-15 Oct. 2003.
[5] Tomoko Tateyama, Zensho Nakao, Xian Yan Zeng, Yen-Wei Chen,"Segmentation of High Resolution Satellite Images by Direction andMorphological Filters," his, pp.482-487, Fourth International Conferenceon Hybrid Intelligent Systems (HIS'04), 2004.
[6] Tuncer, O.; , "Fully Automatic Road Network Extraction from Satellite
Images," Recent Advances in Space Technologies, 2007. RAST '07. 3rdInternational Conference on , vol., no., pp.708-714, 14-16 June 2007.
[7] H. Mayer, I. Laptev, A. Baumgartner, and C. Steger, “Automatic roadextraction based on multi-scale modeling, context, and snakes”, IEEE
Trans. on Med. Img., vol. 32, pp. 47–56, 1997.[8] Zhang, Q. and Couloigner, I., 2006a. Automated Road Network
Extraction from High Resolution Multi-Spectral Imagery. In: ASPRS 2006Annual Conference, Reno, Nevada, 10 pages.
[9] Nock, R.; Nielsen, F.; , "Statistical region merging," Pattern Analysis andMachine Intelligence, IEEE Transactions on , vol.26, no.11, pp.1452-1458, Nov. 2004.
[10] Jalal, A. A Fuzzy Model for Road Identification in Satellite Images.Proceedings of the 2006 International Conference on Image Processing,
Computer Vision, & Pattern Recognition, Las Vegas, Nevada, USA, 2006.[11] Anil Z Chitade, Dr. S.K. Katiyar, “Color Based Image Segmentation
using K-Means Clustering”, International Journal of Engineering Scienceand Technology Vol. 2(10), 2010, 5319-5325
[12] C. Heipke, H. Mayer, C. Wiedemann, and O. Jamet. Evaluation of automatic road extraction. In International Archives of Photogrammetryand Remote Sensing, volume 323-4W2, pages 151-160, 1997.
[13] Harvey, W.A., 1999. Performance evaluation for road extraction.
Bull. Soc. Franc Photogrammet. Tele detection 153 (1999-1), 79–87.
[14] Suman Tatiraju, Avi Mehta “Image Segmentation using kmeans clustering
, EM and Normalized Cuts”, University Of California Irvine . .
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 294
8/7/2019 28.IJAEST Vol No 5 Issue No 2 Raod Extraction Using k Means Clustering and Morphological Operations 290 295
http://slidepdf.com/reader/full/28ijaest-vol-no-5-issue-no-2-raod-extraction-using-k-means-clustering-and 6/6
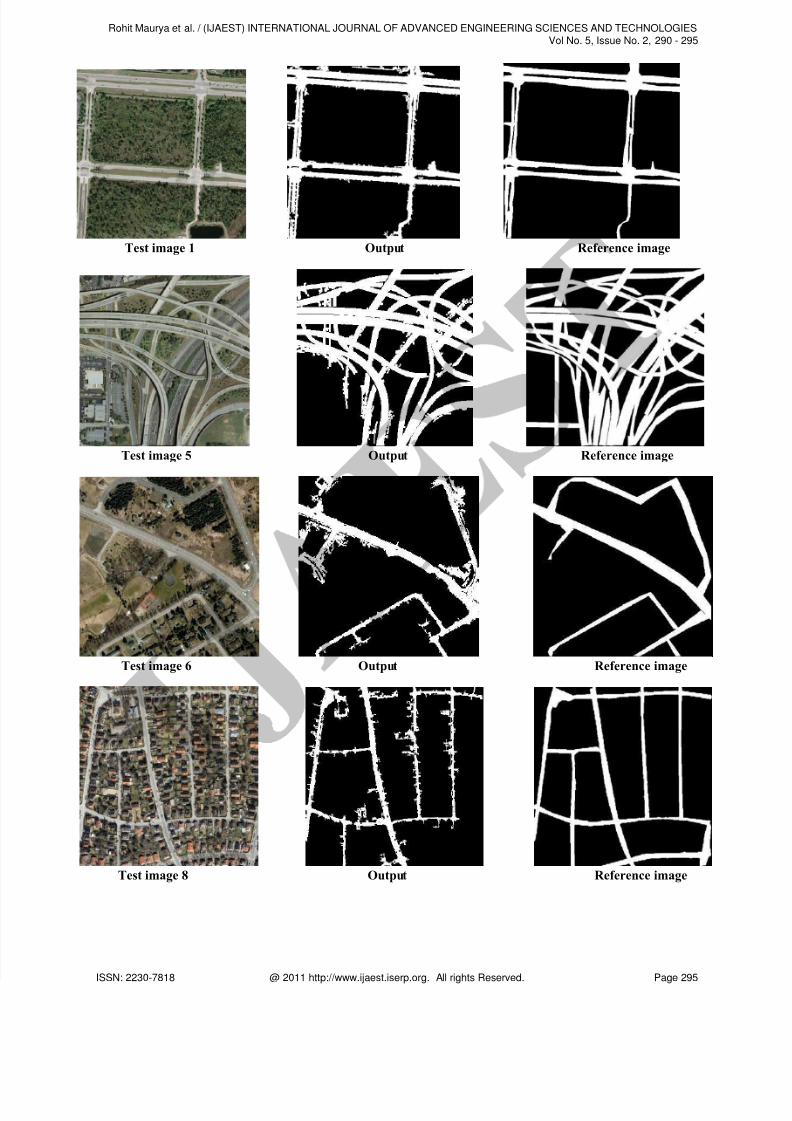
Test image 1 Output Reference image
Test image 5 Output Reference image
Test image 6 Output Reference image
Test image 8 Output Reference image
Rohit Maurya et al. / (IJAEST) INTERNATIONAL JOURNAL OF ADVANCED ENGINEERING SCIENCES AND TECHNOLOGIESVol No. 5, Issue No. 2, 290 - 295
ISSN: 2230-7818 @ 2011 http://www.ijaest.iserp.org. All rights Reserved. Page 295