Embed Size (px)
Citation preview
27th Nov 2001 Univ. Nebraska 1
Constraint Based Scheduling and Optimization:
From Research to Application
Brian Drabble
Computational Intelligence Research Laboratory
www.cirl.uoregon.edu
&
On Time Systems, Inc
www.otsys.com
27th Nov 2001 Univ. Nebraska 2
Overview
• Constraint based scheduling• Algorithms
– LDS and Schedule Pack– Squeaky Wheel Optimization
• Applications– Aircraft assembly– Ship construction
• Future Directions• Summary
27th Nov 2001 Univ. Nebraska 3
Constraint Based Scheduling
• Problem characteristics• Search based techniques
27th Nov 2001 Univ. Nebraska 43
Problem Characteristics
–Task details:• resource requirements
• deadlines/release times
• value
27th Nov 2001 Univ. Nebraska 54
Problem Characteristics
–Task details–Resource characteristics:
• type• capacity• availability• speed, etc.
27th Nov 2001 Univ. Nebraska 65
Problem Characteristics
¨ Task details¨ Resource characteristics¨ Precedences:
– necessary orderings between tasks
27th Nov 2001 Univ. Nebraska 76
Problem Characteristics
–Constraints:• setup costs• exclusions• reserve capacity• union rules/business rules
¨ Task details¨ Resource characteristics¨ Precedences
27th Nov 2001 Univ. Nebraska 87
Problem Characteristics
–Constraints
–Optimization criteria:• makespan, lateness, cost,
throughput
¨ Task details
¨ Resource characteristics¨ Precedences
27th Nov 2001 Univ. Nebraska 98
Optimization Techniques
• Operations Research (OR)– LP/IP solvers
• seem to be near the limits of their potential
• Artificial Intelligence (AI)– search-based solvers
• performance increasing dramatically• surpassing OR techniques for many problems
27th Nov 2001 Univ. Nebraska 109
Search-based Techniques
• Systematic– explore all possibilities
• Depth-First Search• Limited Discrepancy Search
• Nonsystematic– explore only “promising” possibilities
• WalkSAT• Schedule Packing
27th Nov 2001 Univ. Nebraska 1110
Heuristic Search
– A heuristic prefers some choices over others– Search explores heuristically preferred options
27th Nov 2001 Univ. Nebraska 1211
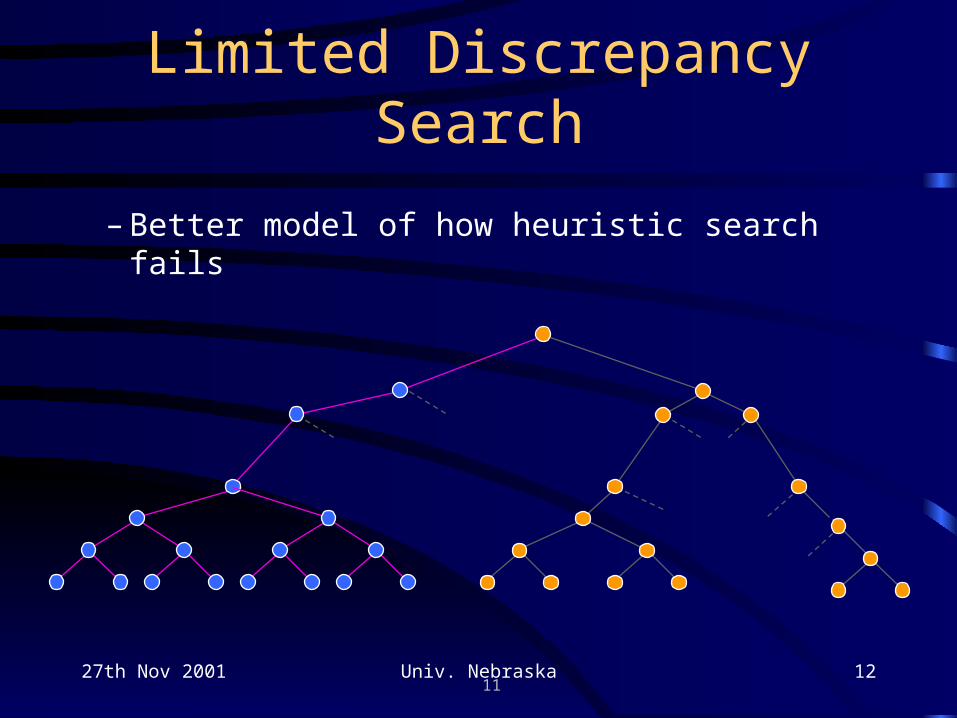
Limited Discrepancy Search
– Better model of how heuristic search fails
27th Nov 2001 Univ. Nebraska 1312
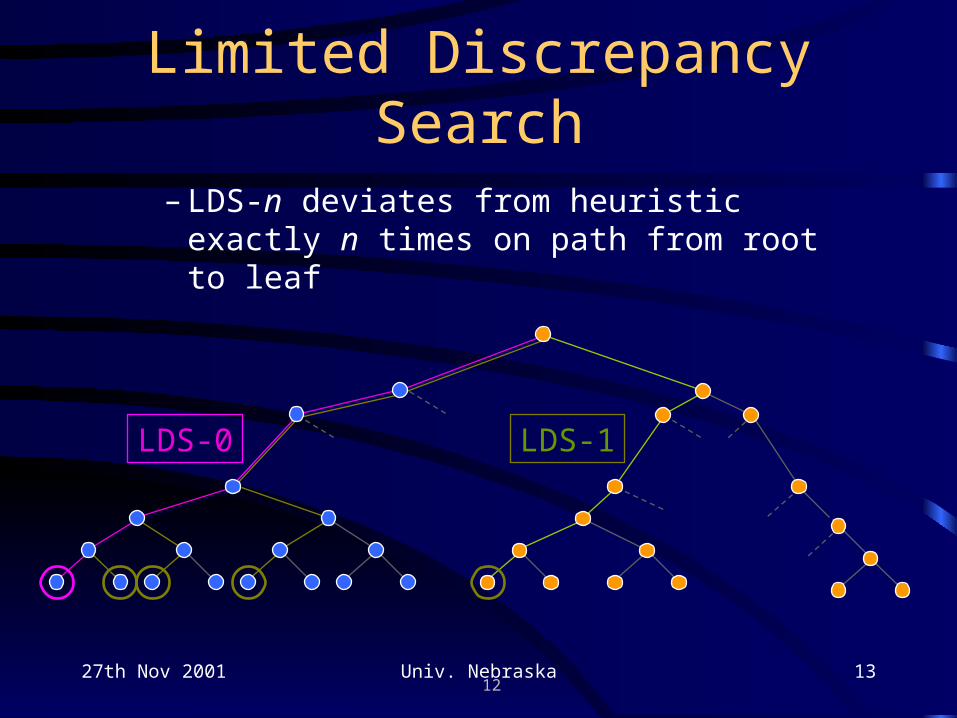
Limited Discrepancy Search– LDS-n deviates from heuristic exactly n times
on path from root to leaf
LDS-1LDS-0
27th Nov 2001 Univ. Nebraska 1413
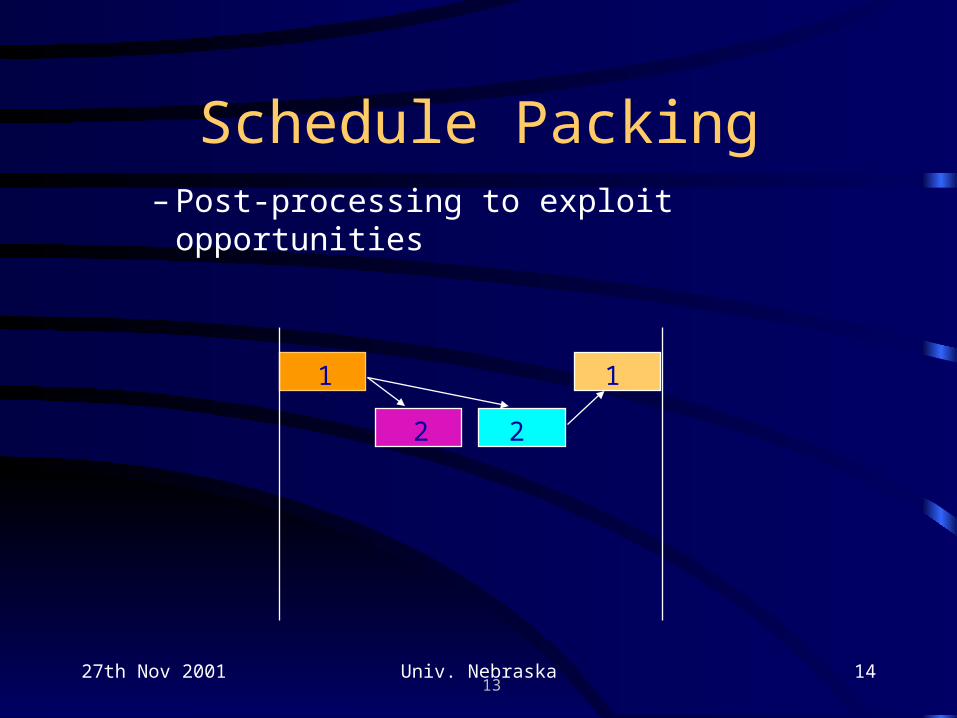
Schedule Packing– Post-processing to exploit opportunities
1 1
2 2
27th Nov 2001 Univ. Nebraska 1514
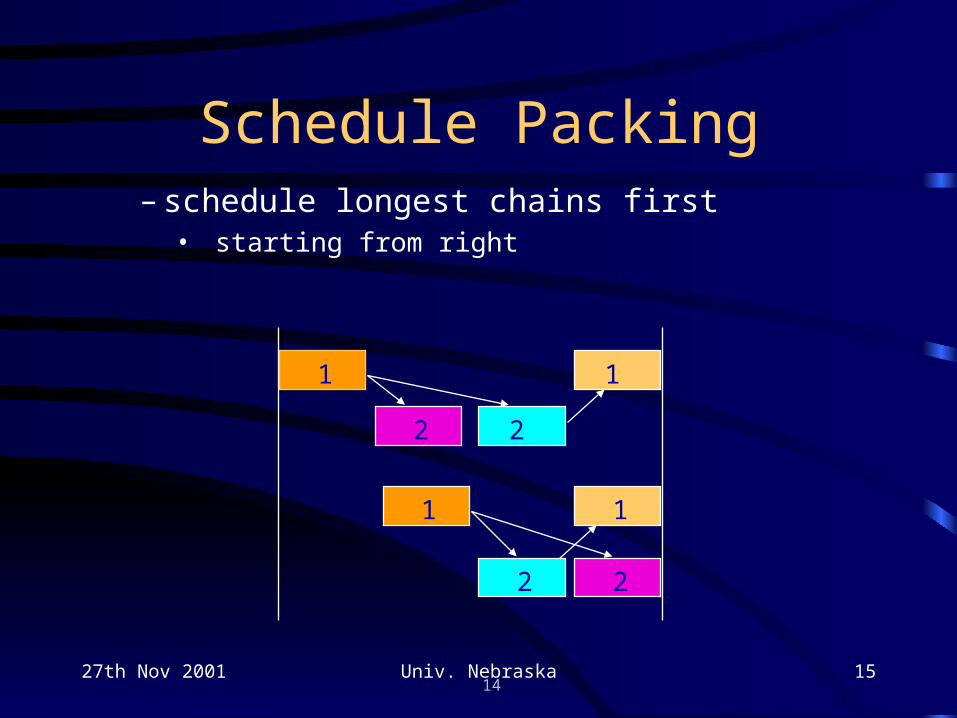
Schedule Packing– schedule longest chains first
• starting from right
1 1
2 2
1 1
2 2
27th Nov 2001 Univ. Nebraska 1615
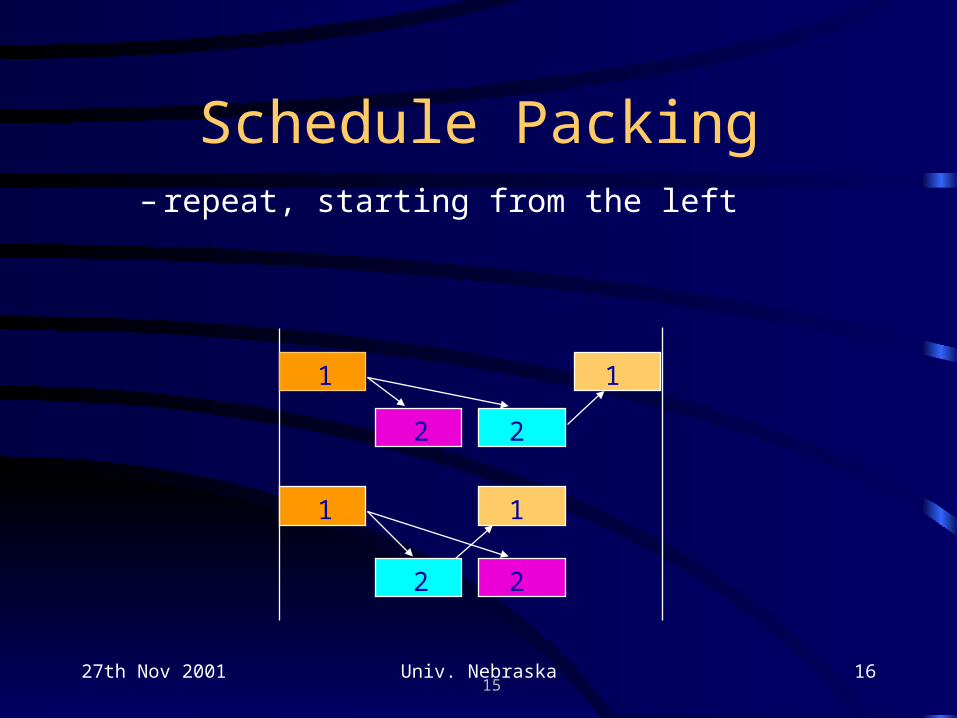
Schedule Packing– repeat, starting from the left
1 1
2 2
1 1
2 2
27th Nov 2001 Univ. Nebraska 17
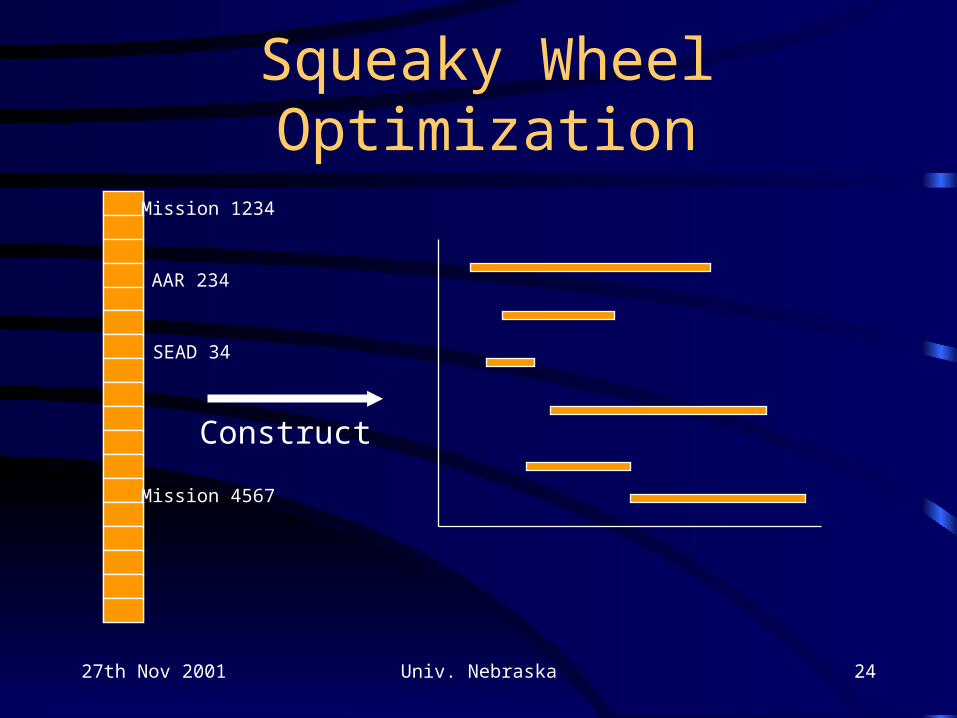
Squeaky Wheel Optimization
• Key insight: scheduling involves two major decisions:– which task to assign next– where to assign it in the schedule
• Create a dual search space– priority space– schedule space
27th Nov 2001 Univ. Nebraska 18
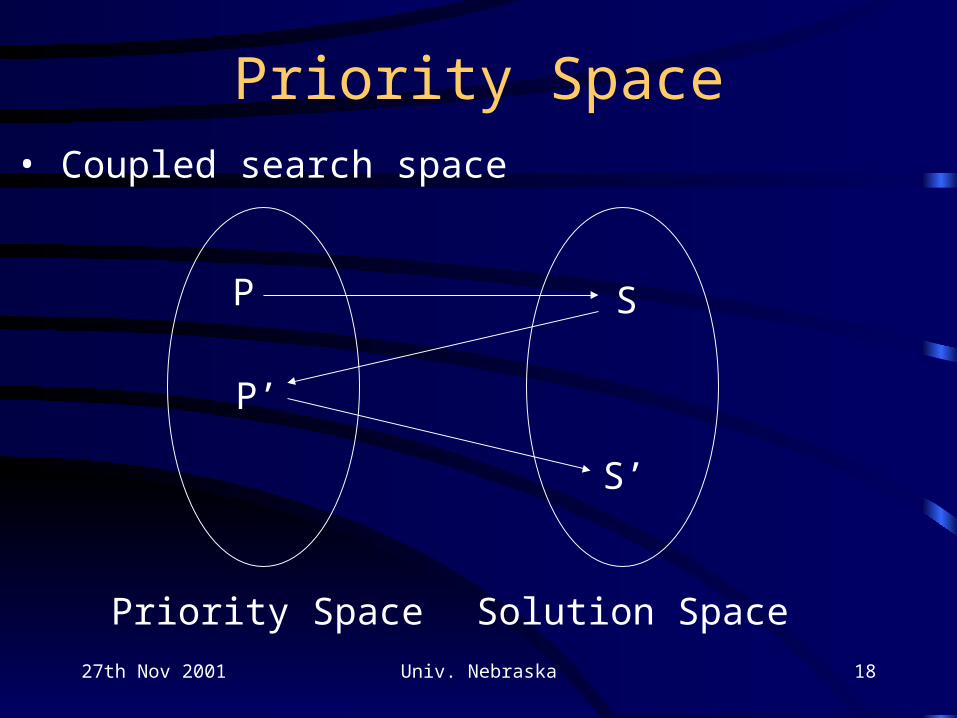
Priority Space
P
P’
S
S’
Priority Space Solution Space
• Coupled search space
27th Nov 2001 Univ. Nebraska 19
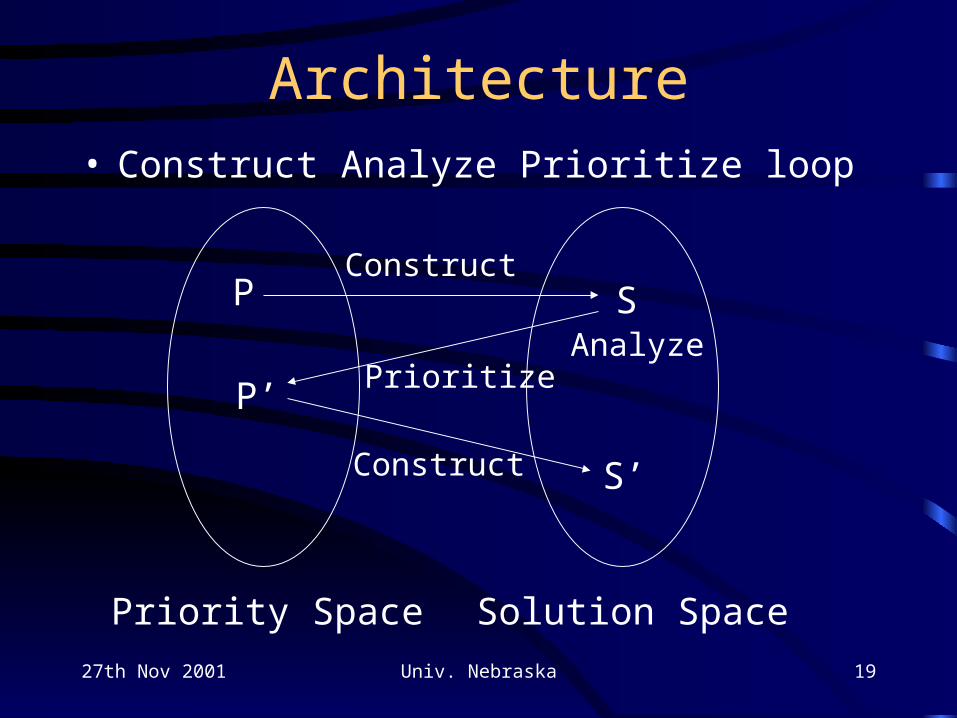
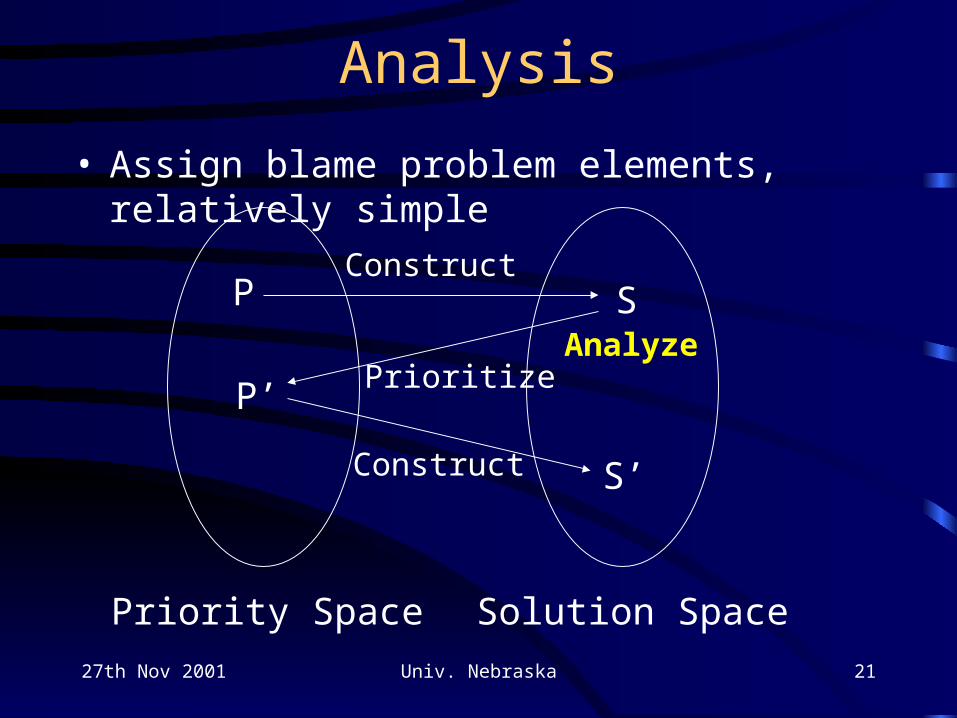
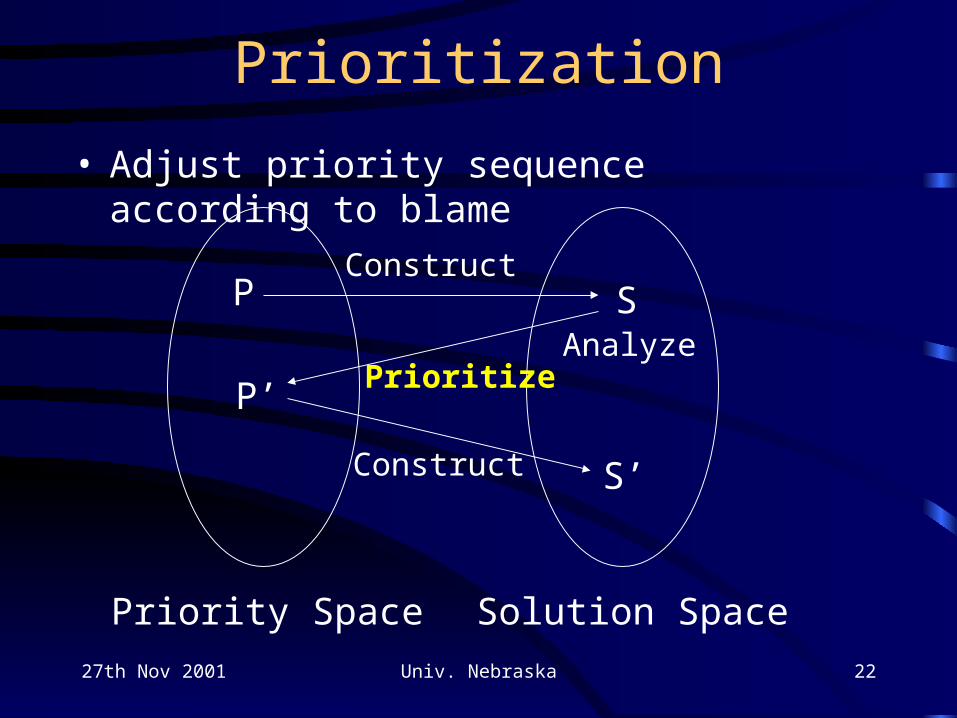
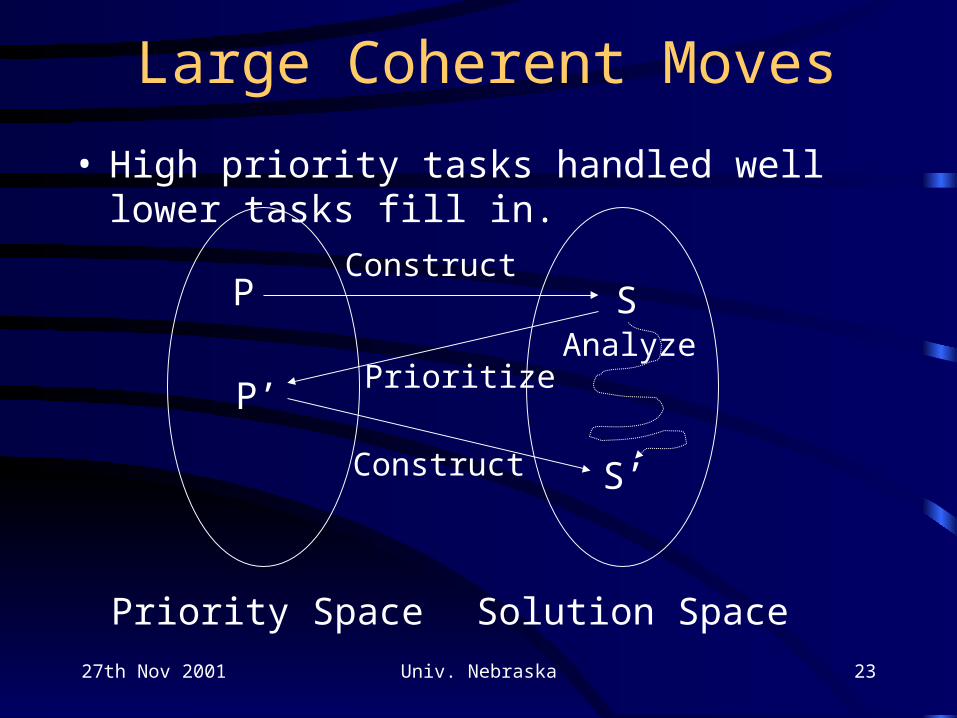
Architecture• Construct Analyze Prioritize loop
P
P’
S
S’
Priority Space Solution Space
Construct
AnalyzePrioritize
Construct
27th Nov 2001 Univ. Nebraska 20
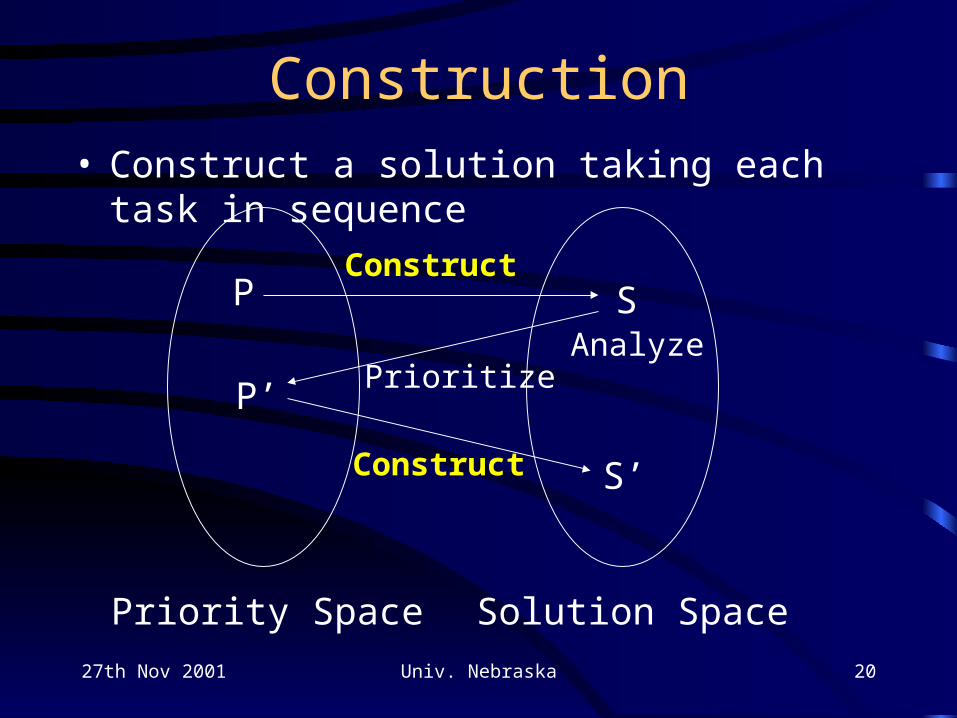
Construction• Construct a solution taking each task in
sequence
P
P’
S
S’
Priority Space Solution Space
Construct
AnalyzePrioritize
Construct
27th Nov 2001 Univ. Nebraska 21
Analysis
• Assign blame problem elements, relatively simple
P
P’
S
S’
Priority Space Solution Space
Construct
AnalyzePrioritize
Construct
27th Nov 2001 Univ. Nebraska 22
Prioritization
• Adjust priority sequence according to blame
P
P’
S
S’
Priority Space Solution Space
Construct
AnalyzePrioritize
Construct
27th Nov 2001 Univ. Nebraska 23
Large Coherent Moves
• High priority tasks handled well lower tasks fill in.
P
P’
S
S’
Priority Space Solution Space
Construct
AnalyzePrioritize
Construct
27th Nov 2001 Univ. Nebraska 24
Squeaky Wheel Optimization
Construct
Mission 1234
AAR 234
SEAD 34
Mission 4567
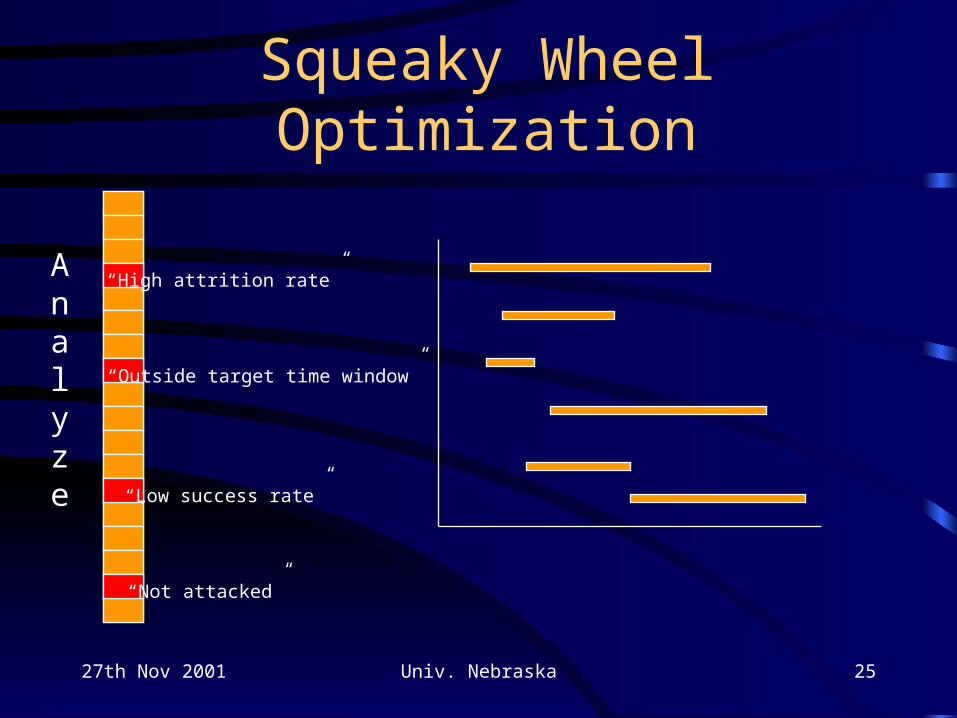
27th Nov 2001 Univ. Nebraska 25
Squeaky Wheel Optimization
Analyze
“High attrition rate”
“Outside target time window”
“Low success rate”
“Not attacked”
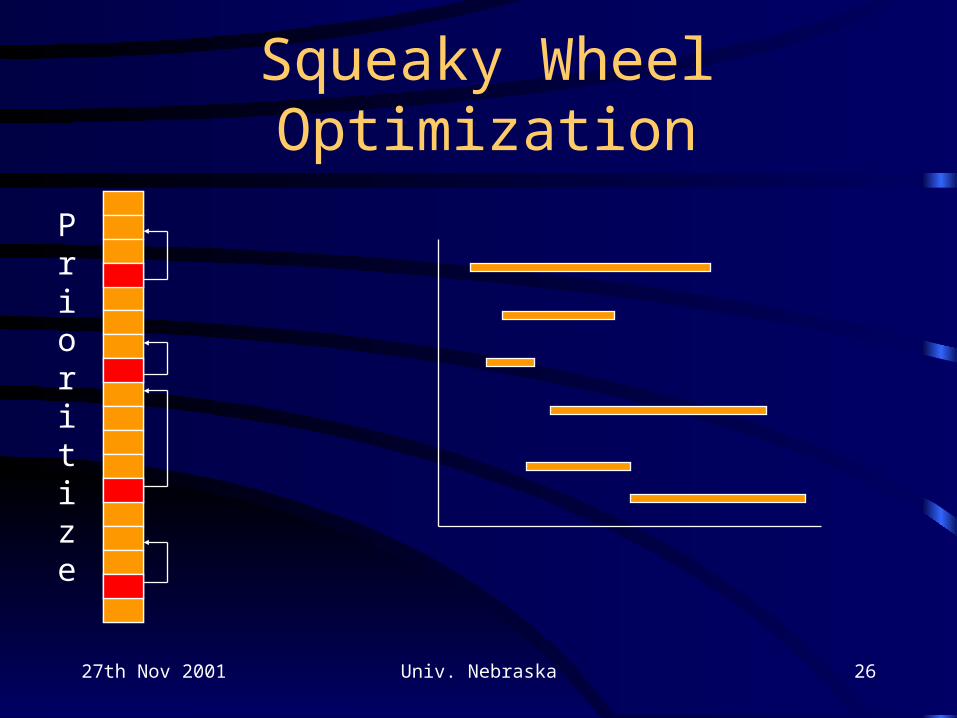
27th Nov 2001 Univ. Nebraska 26
Squeaky Wheel Optimization
Prioritize

27th Nov 2001 Univ. Nebraska 27
Squeaky Wheel Optimization
Prioritize
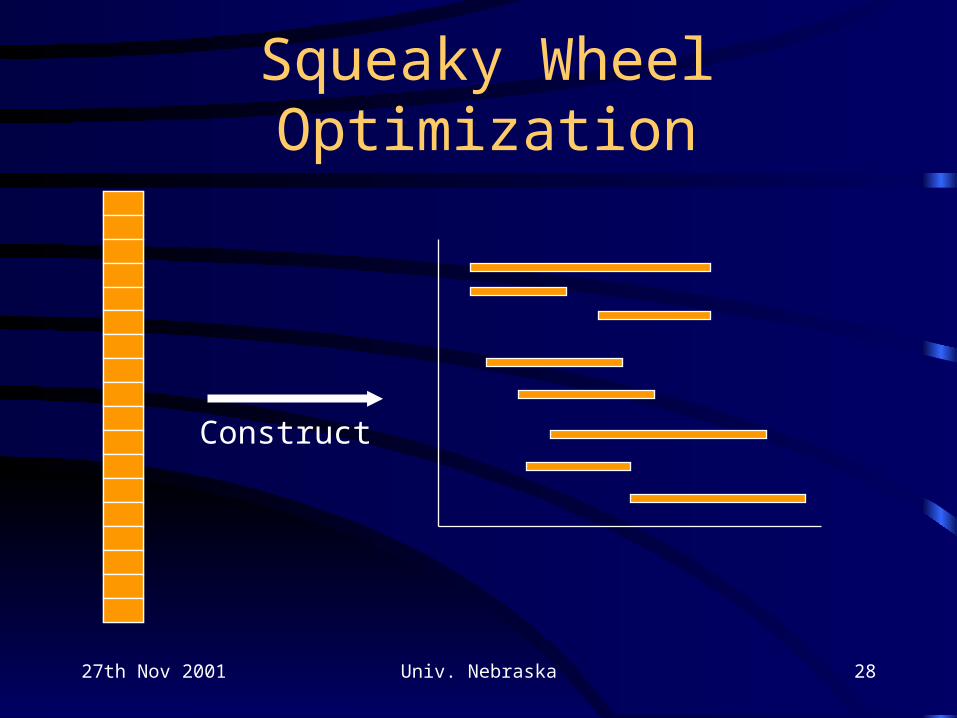
27th Nov 2001 Univ. Nebraska 28
Squeaky Wheel Optimization
Construct
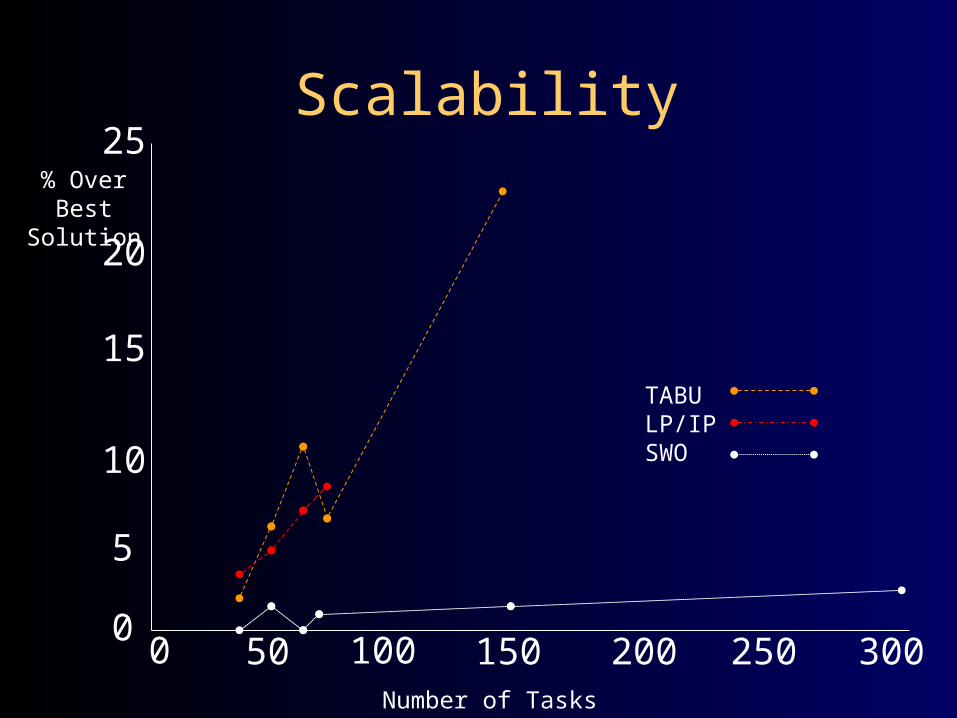
Scalability
0
5
10
15
20
25
0 50 100 150 200 250 300Number of Tasks
% Over Best Solution
TABULP/IPSWO
27th Nov 2001 Univ. Nebraska 3016
Applications
27th Nov 2001 Univ. Nebraska 3117
Aircraft Assembly
McDonnell Douglas / Boeing
– ~570 tasks, 17 resources, various capacities
– MD’s scheduler took 2 days to schedule
– needed:
• better schedules (1 day worth $200K–$1M)
• rescheduler that can get inside production cycles
27th Nov 2001 Univ. Nebraska 3218
Problem Specification
– Task/precedence specification• mostly already existed for regulatory reasons
27th Nov 2001 Univ. Nebraska 3319
Problem Specification
– Task/precedence specification• mostly already existed for regulatory reasons
– Resource capacity profiles• labor profile available from staffing information• others determined from SOPs, etc.
27th Nov 2001 Univ. Nebraska 3420
Problem Specification
– Task/precedence specification• mostly already existed for regulatory reasons
– Resource capacity profiles• labor profile available from staffing information• others determined from SOPs, etc.
– Optimization criterion• simple makespan minimization

27th Nov 2001 Univ. Nebraska 3521
Problem Specification
– Task/precedence specification• mostly already existed for regulatory reasons
– Resource capacity profiles• labor profile available from staffing information• others determined from SOPs, etc.
– Optimization criterion• simple makespan minimization
– Solution checker• available from in-house scheduling efforts
27th Nov 2001 Univ. Nebraska 3622
The Optimizer
• LDS to generate seed schedules• Schedule packing to optimize
– intensification improves convergence speed
• etc.
27th Nov 2001 Univ. Nebraska 3723
Performance
– ~570 tasks, 17 resources, various capacities• about 1 second to first solution• about 1 minute to within 2% of best known• about 30 minutes to best schedule known
27th Nov 2001 Univ. Nebraska 3824
Performance
– ~570 tasks, 17 resources, various capacities• about 1 second to first solution• about 1 minute to within 2% of best known• about 30 minutes to best schedule known
– 10-15% shorter makespan than best in-house• 4 to 6 days shorter schedules
27th Nov 2001 Univ. Nebraska 3925
Performance
– ~570 tasks, 17 resources, various capacities• about 1 second to first solution• about 1 minute to within 2% of best known• about 30 minutes to best schedule known
– 10-15% shorter makespan than best in-house• 4 to 6 days shorter schedules
– 2 orders of magnitude faster scheduling• scheduler runs inside production cycle• less need for rescheduler
27th Nov 2001 Univ. Nebraska 4026
Extensions
Boeing:– multi-unit assembly– interruptible tasks– persistent assignments– multiple objectives
• e.g., time to first completion, average makespan, time to completion
• fast enough to use for “what-iffing”– discovered improved PM schedule
• Noise is your friend!!!
27th Nov 2001 Univ. Nebraska 4127
Submarine Construction
General Dynamics / Electric Boat– 7000 activities per hull, approx 125 resource types– Electric Boat’s scheduler takes 6 weeks– needed:
• cheaper schedules• faster schedules to deal with contingencies
27th Nov 2001 Univ. Nebraska 42
Problem Specification
• reschedule shipyard operations to reduce wasted labor expenses
• efficient management of labor profiles– reduce overtime and idle time– hiring and RIF costs
27th Nov 2001 Univ. Nebraska 43
Optimizer
• ARGOS is new technology developed specifically with these goals in mind
27th Nov 2001 Univ. Nebraska 44
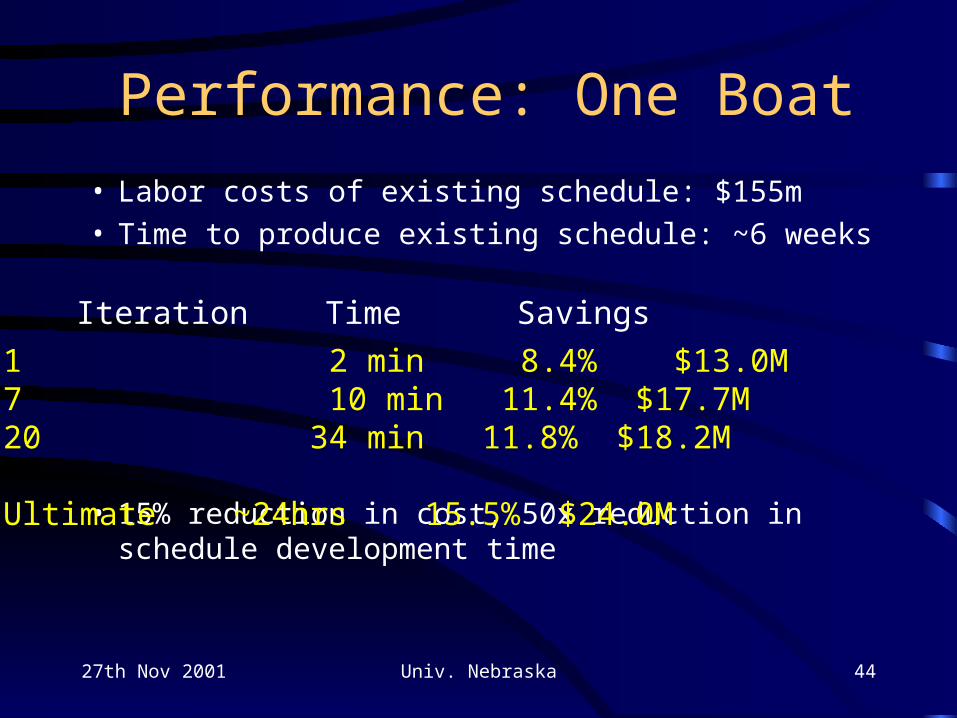
• Labor costs of existing schedule: $155m• Time to produce existing schedule: ~6 weeks
• 15% reduction in cost, 50x reduction in schedule development time
Performance: One Boat
Iteration Time Savings
1 2 min 8.4% $13.0M7 10 min 11.4% $17.7M20 34 min 11.8% $18.2M
Ultimate ~24hrs 15.5% $24.0M
27th Nov 2001 Univ. Nebraska 45
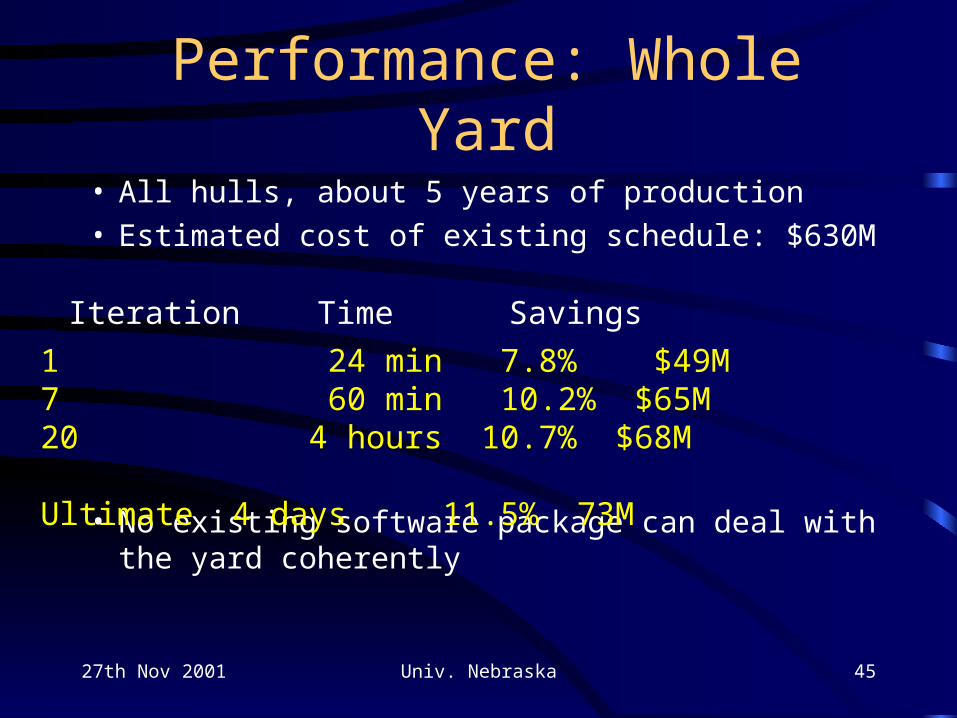
Performance: Whole Yard
• All hulls, about 5 years of production• Estimated cost of existing schedule: $630M
• No existing software package can deal with the yard coherently
Iteration Time Savings
1 24 min 7.8% $49M7 60 min 10.2% $65M20 4 hours 10.7% $68M
Ultimate 4 days 11.5% 73M
27th Nov 2001 Univ. Nebraska 46
Extensions
• Shared resources– dry dock– cranes
• Sub-assemblies– provided by different yards and suppliers
• Repair– dealing with new jobs
27th Nov 2001 Univ. Nebraska 47
Future Applications
• Workflow management– STRATCOM checklist manager– IBM
• E-Business– supply chain management
• Military– air expeditionary forces– logistics
27th Nov 2001 Univ. Nebraska 48
Future Work
• Robustness• Distributed scheduling• Common task description
27th Nov 2001 Univ. Nebraska 49
Penalty Box Scheduling
• Sub-set of the tasks with higher probability of success.– 90% probability of destroying 90% of the targets?– 96% probability of destroying 75% of the targets?
• Inability to resource leads to a task “squeak” • Blame score related to user priority and
“uniqueness”• Reduce the target percentage until no
significant improvement is found
27th Nov 2001 Univ. Nebraska 50
Semi-Flexible Constraints
• The time constraints provided by the users tended to be ad-hoc and imprecise– heuristics based on sortie rate, no of targets, etc– this is what we did last time so it must be right!!
• Not a preference– this is what I want until you can prove otherwise!!
• Two algorithms were investigated– pointer based– ripple based
27th Nov 2001 Univ. Nebraska 51
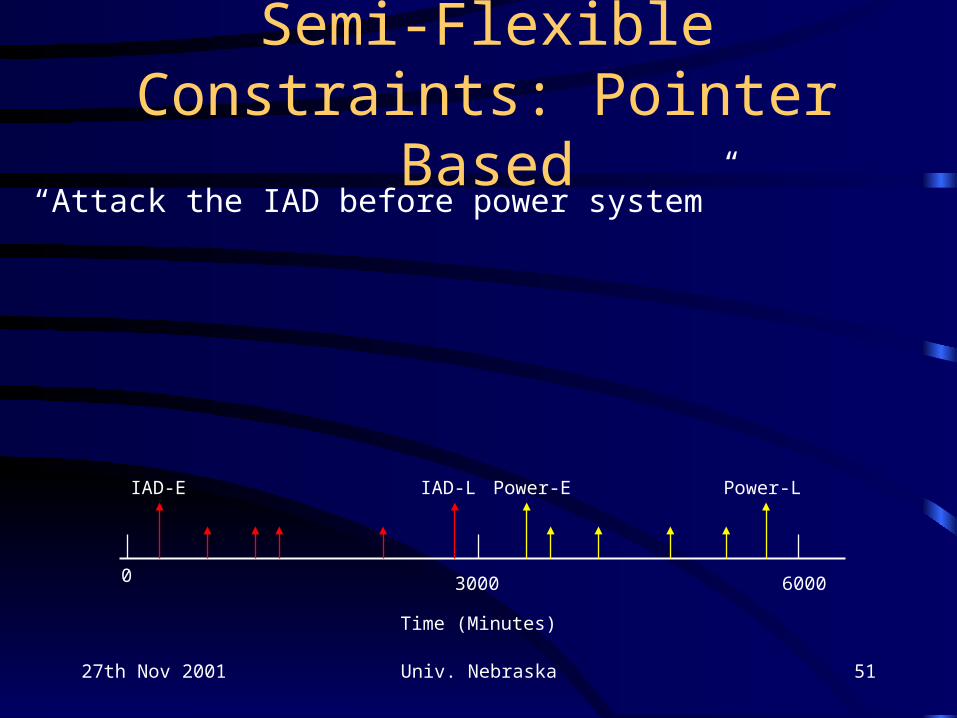
Semi-Flexible Constraints: Pointer Based
“Attack the IAD before power system”
IAD-E
0 3000 6000
Time (Minutes)
Power-EIAD-L Power-L
27th Nov 2001 Univ. Nebraska 52
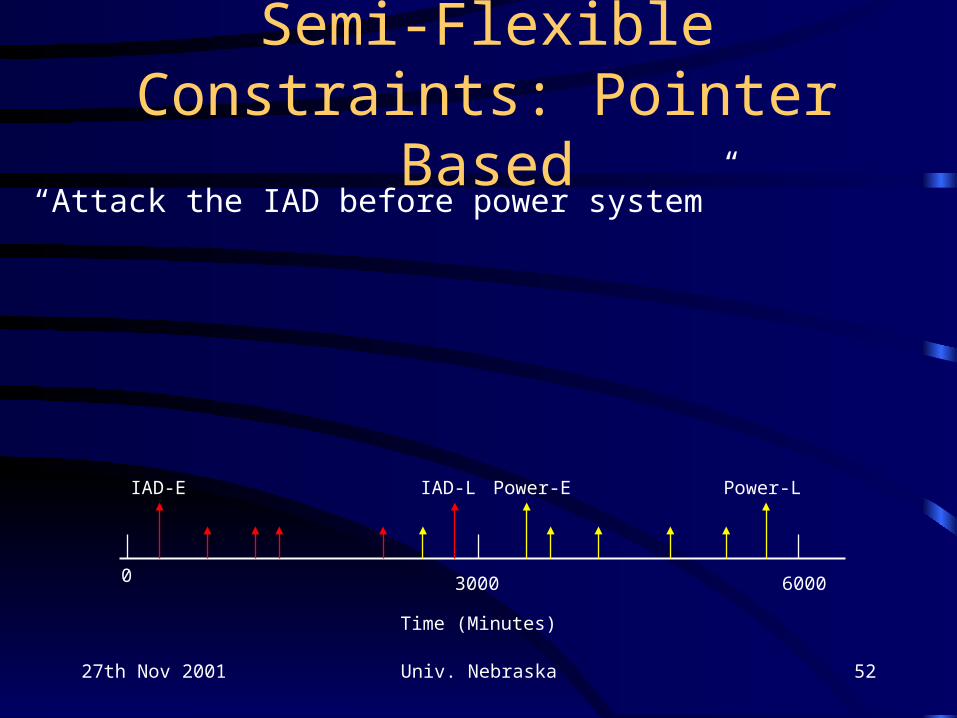
Semi-Flexible Constraints: Pointer Based
“Attack the IAD before power system”
IAD-E
0 3000 6000
Time (Minutes)
Power-EIAD-L Power-L
27th Nov 2001 Univ. Nebraska 53
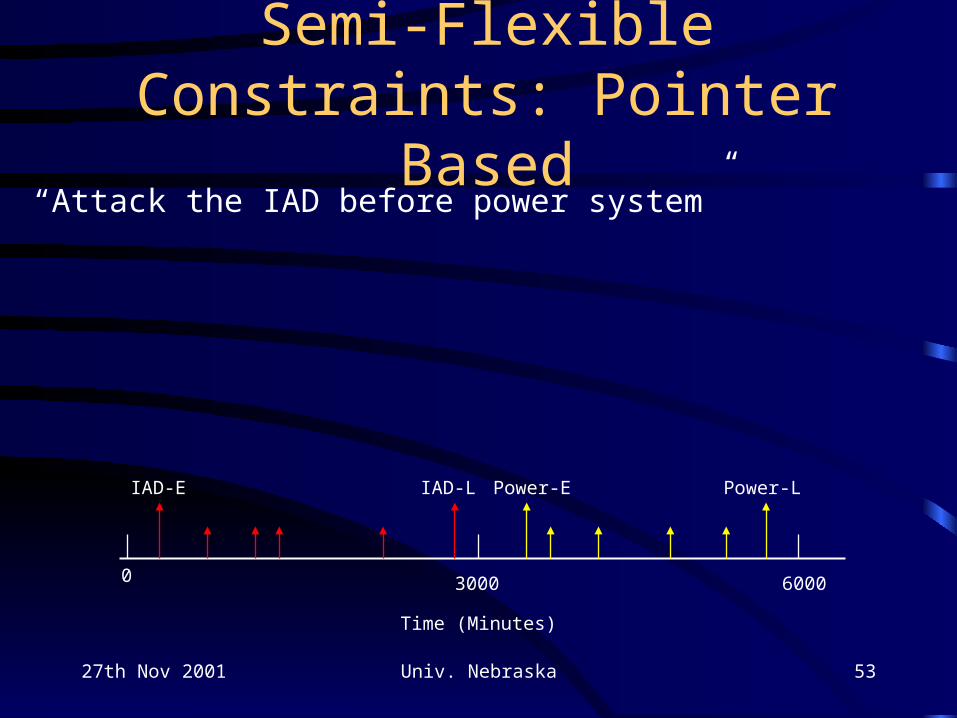
Semi-Flexible Constraints: Pointer Based
“Attack the IAD before power system”
IAD-E
0 3000 6000
Time (Minutes)
Power-EIAD-L Power-L

27th Nov 2001 Univ. Nebraska 54
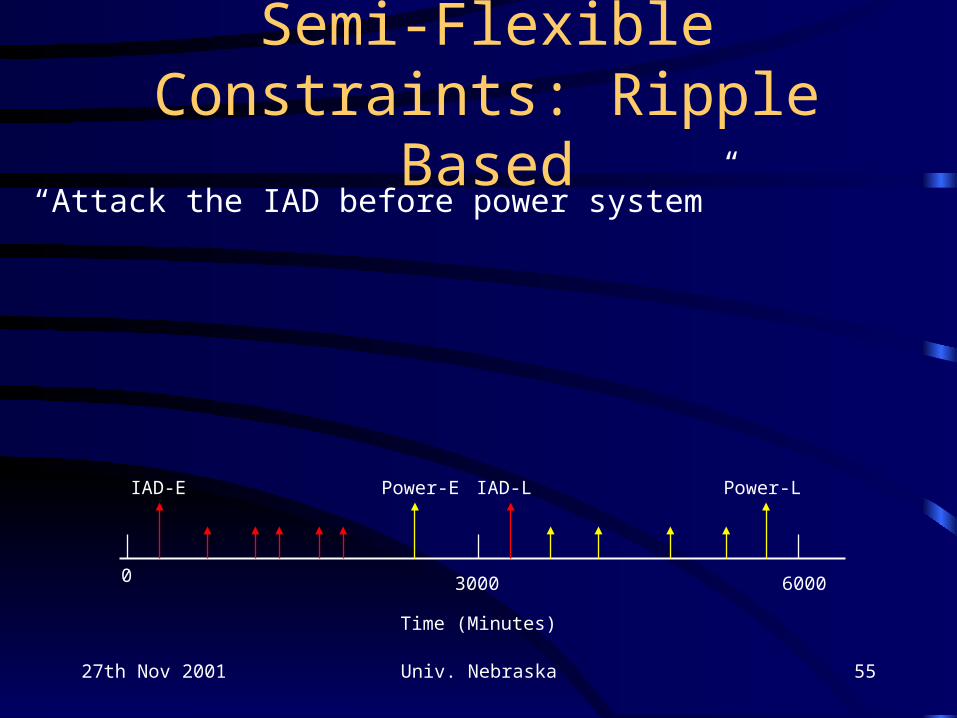
Semi-Flexible Constraints: Ripple Based
IAD-E
0 3000 6000
Time (Minutes)
Power-EIAD-L Power-L
“Attack the IAD before power system”
27th Nov 2001 Univ. Nebraska 55
Semi-Flexible Constraints: Ripple Based
IAD-E
0 3000 6000
Time (Minutes)
Power-E Power-L
“Attack the IAD before power system”
IAD-L
27th Nov 2001 Univ. Nebraska 56
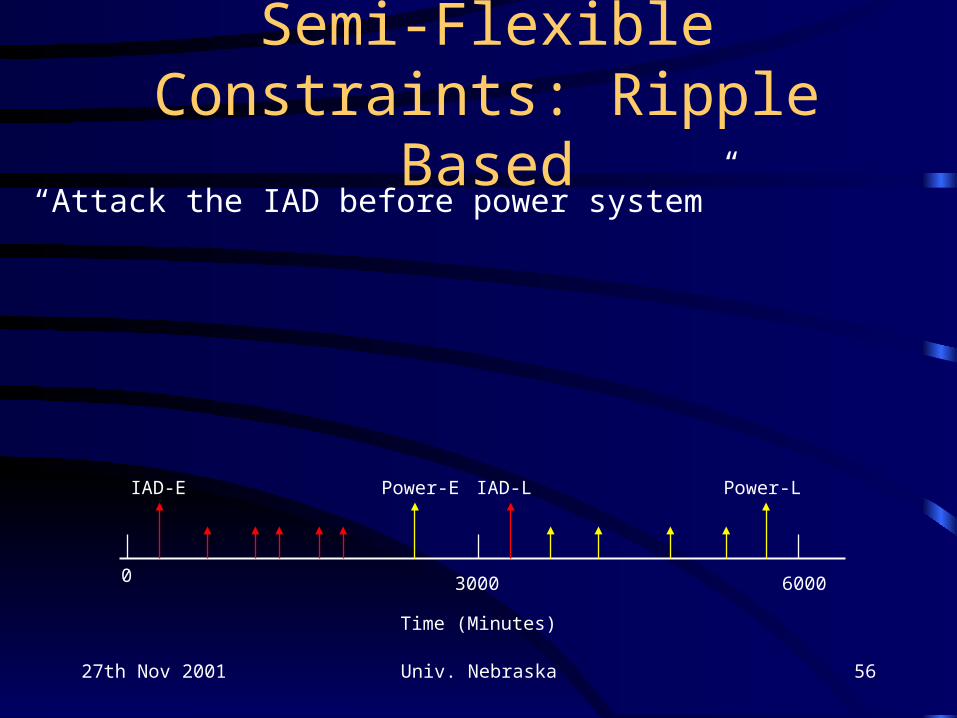
Semi-Flexible Constraints: Ripple Based
IAD-E
0 3000 6000
Time (Minutes)
Power-E Power-L
“Attack the IAD before power system”
IAD-L
27th Nov 2001 Univ. Nebraska 57
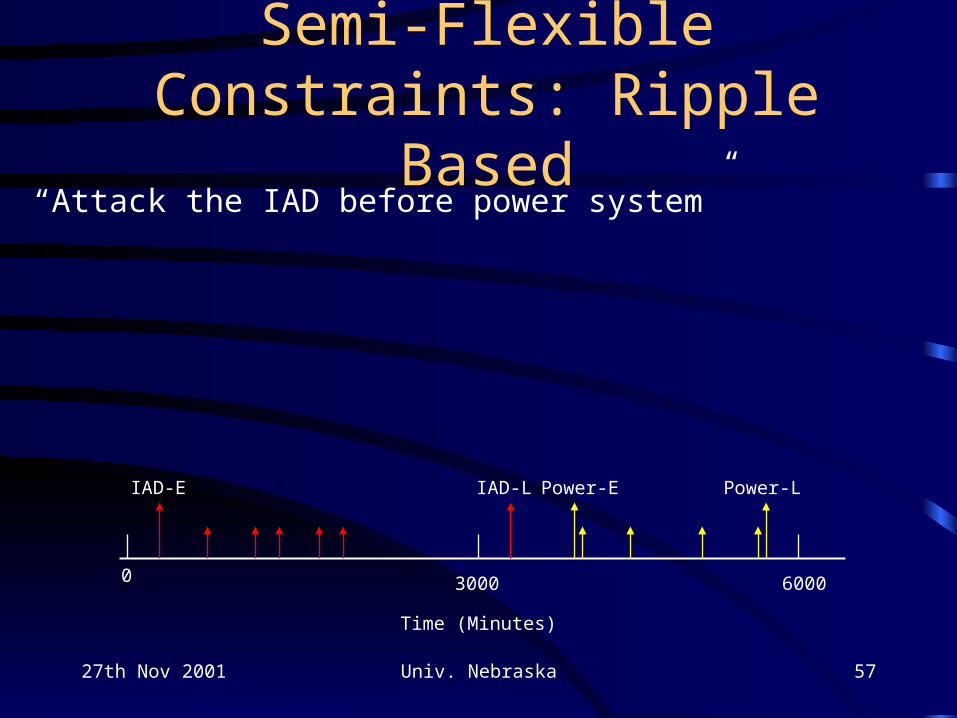
Semi-Flexible Constraints: Ripple Based
IAD-E
0 3000 6000
Time (Minutes)
Power-LPower-E
“Attack the IAD before power system”
IAD-L
27th Nov 2001 Univ. Nebraska 58
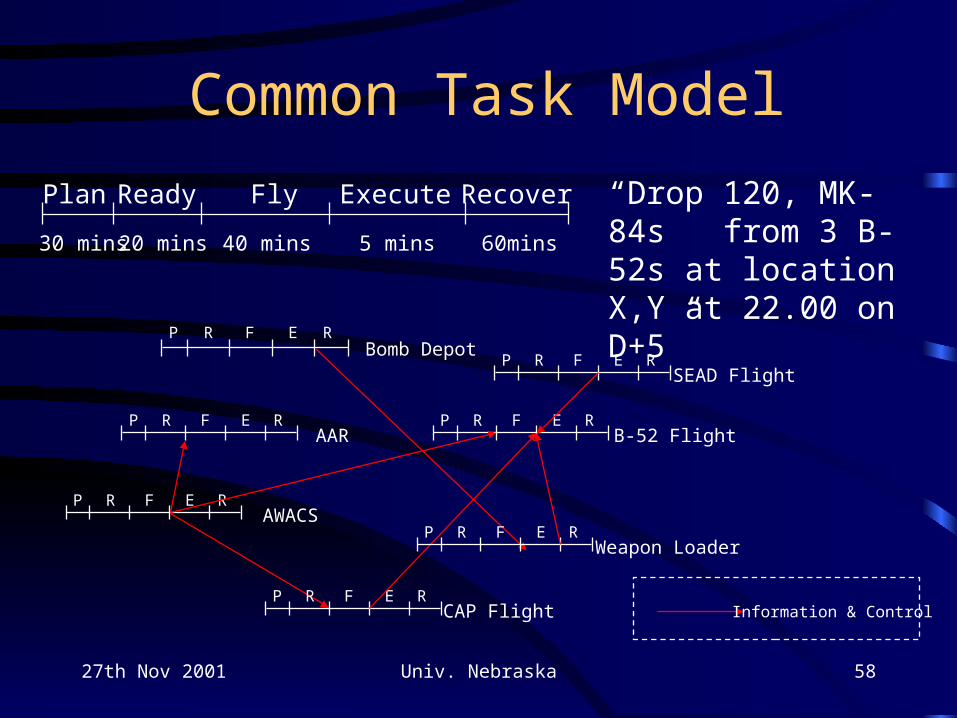
Common Task Model
Plan Ready Fly Execute Recover “Drop 120, MK-84s from 3 B-52s at location X,Y at 22.00 on D+5”
30 mins 20 mins 40 mins 5 mins 60mins
P R F E RB-52 Flight
P R F E RAAR
P R F E RAWACS
P R F E RBomb Depot
P R F E RCAP Flight Information & Control
P R F E RWeapon Loader
P R F E RSEAD Flight
27th Nov 2001 Univ. Nebraska 59
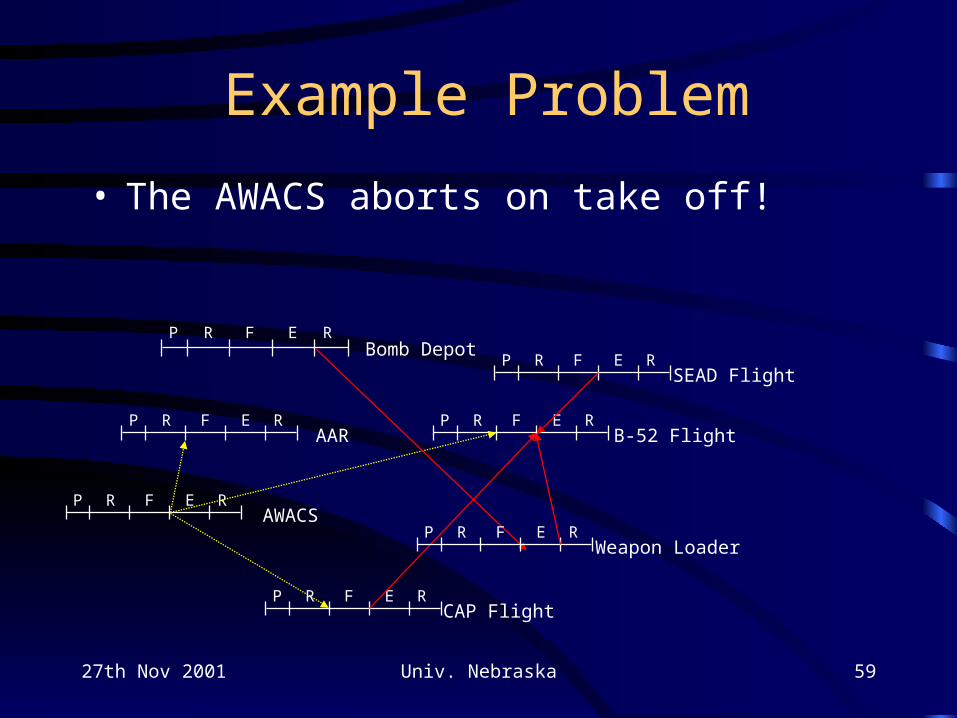
Example Problem
• The AWACS aborts on take off!
P R F E RB-52 Flight
P R F E RAAR
P R F E RAWACS
P R F E RBomb Depot
P R F E RCAP Flight
P R F E RWeapon Loader
P R F E RSEAD Flight
27th Nov 2001 Univ. Nebraska 60
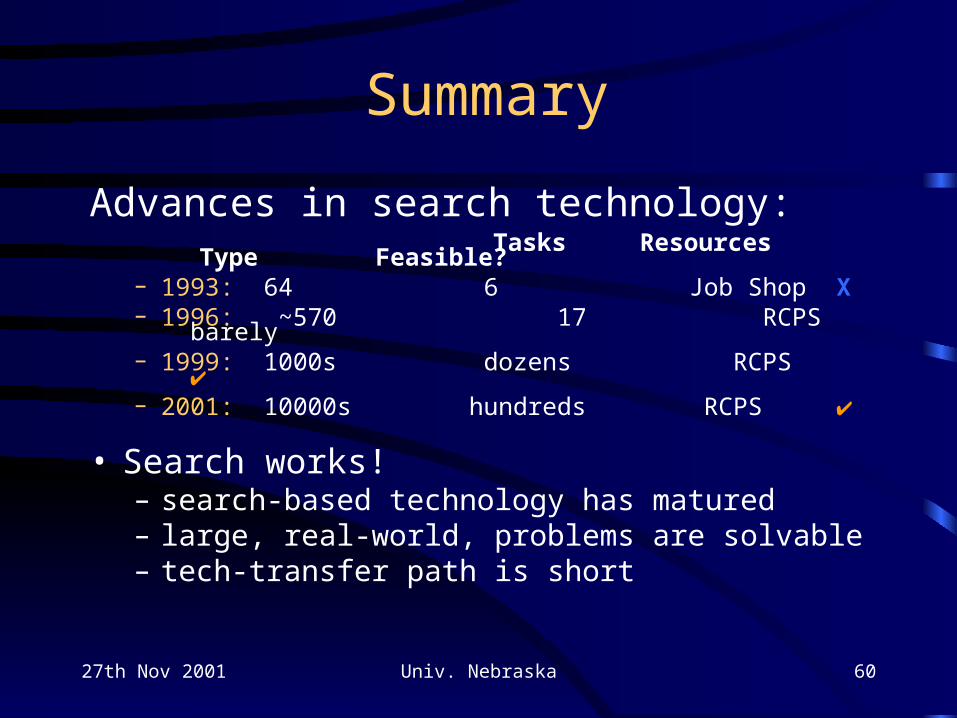
Summary
Advances in search technology: Tasks Resources Type Feasible?
– 1993: 64 6 Job Shop X – 1996: ~570 17 RCPS barely– 1999: 1000s dozens RCPS – 2001: 10000s hundreds RCPS
• Search works!– search-based technology has matured– large, real-world, problems are solvable– tech-transfer path is short
27th Nov 2001 Univ. Nebraska 61
Questions
?





























