Embed Size (px)
Citation preview

cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Convertidor Back-to-Back para el Banco de Pruebas de Conversión Eoloeléctrica en un Sistema Aislado”
presentada por
Dana Luz González Ojeda Ing. en Electrónica por el I. T. de Orizaba
como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Electrónica
Director de tesis: Dr. Jesús Aguayo Alquicira
Co-Director de tesis: Dra. María Cotorogea Pfeifer
Cuernavaca, Morelos, México. 18 de Abril de 2008


cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Convertidor Back-to-Back para el Banco de Pruebas de Conversión Eoloeléctrica en un Sistema Aislado”
presentada por
Dana Luz González Ojeda Ing. Electrónico por el I. T. de Orizaba
como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Electrónica
Director de tesis: Dr. Jesús Aguayo Alquicira
Co-Director de tesis: Dra. María Cotorogea Pfeifer
Jurado: Dr. Jaime Eugenio Arau Roffiel – Presidente Dr. Abraham Claudio Sánchez – Secretario
Dr. Jesús Aguayo Alquicira – Vocal Dr. Mario Ponce Silva – Vocal Suplente
Cuernavaca, Morelos, México. 18 de Abril de 2008


Dedicatoria
A mi madre Ernestina Ojeda Hernández, por darme la vida y apoyarme en todos los
momentos buenos y malos. Gracias mamá por todo lo que me das, por tus consejos, por tu
paciencia y lo más importante por todo tu amor. Sin ti no sería lo que soy.
A mi abuelita Mercedes Hernández Torres, por quererme tanto, por consentirme y
apoyarme cuando lo necesito.
A mi abuelito Ernesto Ojeda Amador, aunque ya no este presente siempre lo llevo en
mi corazón.
A mi amorcito Eder González Toy, por amarme tanto y por darme palabras de aliento
cuando sentía que no podía terminar. Te amo mi amor.
A la familia Herrera Ojeda, por quererme y apoyarme siempre, los quiero tíos, a Nid y
a Pepito que son como mis hermanos pequeños.


Agradecimientos
A Dios, por darme la fortaleza para continuar cada día.
A mi asesor el Dr. Jesús Aguayo Alquicira, por brindarme su amistad y apoyo durante
el desarrollo de este trabajo.
A la Dra. María Cotorogea Pfeifer, por su confianza al elegirme para desarrollar este
trabajo de tesis.
A mis revisores, Dr. Jaime Arau Roffiel y Dr. Abraham Claudio Sánchez, por lo
comentarios que me ayudaron a finalizar este trabajo.
A mis profesores: Dr. Carlos Aguilar Castillo, Dr. Jorge Hugo Calleja Gjumlich, Dr.
Mario Ponce Silva, Dr. Alejandro Rodríguez Palacios, Dr. Marco A. Oliver Salazar, Dr.
Luís Gerardo Vela Valdés y M.C. José Martín Ramos López por sus enseñanzas.
A toda mi familia: Martha Ojeda, Rafael Ojeda, Armando Ojeda, familia Ramos Ojeda,
familia Ojeda Bautista, familia González Ajuria, familia Becerril Ajuria y mi comadre
Irasema Ojeda, por darme su cariño y apoyo.
A mi amiga Gisela Morales Amaro, por su lealtad, cariño y amistad incondicional.

A Roberto Galindo del Valle por el tiempo que me dedico para que yo pudiera
comprender.
A mis compañeros y amigos: Miguel Ángel Alcántara, Pacheco Álamos, Isaura
Hernández, Eusebia Guerrero, Omar Hernández, Francisco Alegría, Benedicto López,
Ronay Estrada, Ignacio Ramírez, Diego Balderrama, Jorge Luís Raymundo, Ricardo
Mateos, Marco Méndez, Cornelio y Josefa Morales, Iván Viveros, Eduardo Bernal y Luís
Alberto Madrid, gracias por su apoyo, amistad y compañerismo.
A la familia Aguilar Domínguez, por brindarme su amistad.
A la Lic. Olivia Maquinay y Anita Pérez, por que siempre me ayudaron para resolver
cualquier duda.
Al Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET), por
brindarme la oportunidad de crecer profesionalmente.
Al Consejo Nacional de Ciencia y Tecnología (CONACYT) y a la Dirección General
de Educación Superior Tecnológica (DGEST), por el apoyo económico que me permitió
concluir mis estudios.

Convertidor Back-to-Back para el Banco de Pruebas de Generación
Eoloeléctrica en un Sistema Eléctrico Aislado
Autor
Dana Luz González Ojeda
(RESUMEN)
Hoy en día la demanda de sistemas de generación eléctrica basados en fuentes
alternativas y renovables está creciendo a nivel mundial. Algunas de las principales causas
de este aumento son la creciente demanda de energía eléctrica y el incremento en los costos
de combustibles no renovables.
Actualmente, la energía eólica es la única fuente de energía alternativa económicamente
viable a gran escala, ya que en sitios con buenos recursos eólicos es posible obtener costos
de energía más bajos que los correspondientes a la mejor tecnología de generación con
combustible.
Con el avance de la tecnología en la generación eoloeléctrica han surgido nuevos
esquemas de generación a velocidad variable, entre ellos están los sistemas que utilizan
máquinas de inducción doblemente alimentadas (DFIM). La principal ventaja de este tipo
de máquinas es que permiten el control de la tensión y la frecuencia generada a partir de la
adecuada manipulación de las corrientes en el circuito de rotor de la máquina.
Para efectuar el control de la DFIM suele utilizarse un convertidor electrónico de
potencia back-to-back en su circuito rotórico. Este convertidor debe permitir el flujo de
potencia en ambas direcciones. Esto ocurre debido a que la máquina puede consumir o
producir energía en su circuito secundario, dependiendo de las condiciones de operación.
En los últimos años se ha hecho frecuente el uso de sistemas de generación eoloeléctrica
del tipo aislado basados en generadores de inducción doblemente alimentados, diseñados
para trabajar a velocidad variable y producir frecuencia y voltaje constante. En este
documento se presenta la simulación e implementación experimental de un sistema aislado,
el cual utiliza un convertidor bidireccional de potencia back-to-back conectado entre las
terminales del generador, permitiendo así trabajar a velocidad sub y supersíncrona.


Back-to-Back Converter for the Test Rig of the Wind Energy
Conversión System in a Stand Alone Application
Autor
Dana Luz González Ojeda
(ABSTRACT)
The demand for alternative and renewables energy generation systems is growing in
recent years arround the world. This growth has been prompted by a rising worldwide
demand for electricity and a increasing costs of non-renewable fuels.
Today, wind energy is the only economically viable alternative energy source to large-
scale, because in sites with good wind resources is posible obtain lower energy costs than
those for the best technology generation with fuels.
With the advance of technology in wind energy have emerged new generation schemes
of a variable speed, one of this are the systems that use doubly fed induction machines
(DFIM). The main advantage of these machines is that allow the control of voltage and
frecuency generated through the proper handling of the currents in the rotor of the machine.
To control the DFIM is commonly used a back-to-back converter connected to the
rotor. This converter must allow the flow in both directions. This happens because the
machine can produce or consume the energy in its secondary circuit, dependin on operation
conditions.
In recent years there has been frequently the use of wind energy generation systems in
stand alone applications based on doubly fed induction generators, designed to be driven at
variable speed and produced constant frequency and voltage. This thesis presents the
simulation and experimental implementation of an stand alone system, which uses a back-
to-back converter connected between the stator and the rotor of the generator, with this the
system allows sub and super synchronous operation.

Tabla de contenido
I
Notación V
Lista de figuras XI
Lista de tablas XVII
1. Introducción 1
1.1 Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Justificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4.1 Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4.2 Objetivos particulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6 Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6.1 Sistemas de conversión de energía eólica . . . . . . . . . . . . . . . . . . . . 5

II
1.6.1.1 Sistema de velocidad fija . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6.1.2 Sistemas de velocidad variable . . . . . . . . . . . . . . . . . . . . . 7
1.6.2 Máquinas doblemente alimentadas . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.6.3 Convertidores bi-direccionales de potencia . . . . . . . . . . . . . . . . . . . 10
1.6.4 Emuladores de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.7 Propuesta de solución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.8 Organización del documento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. Sistema de conversión eoloeléctrica 17
2.1 Máquina de inducción doblemente alimentada . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Convertidor back-to-back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Modos de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.2.1 Modo de operación subsíncrono . . . . . . . . . . . . . . . . . . . . 21
2.2.2.2 Modo de operación síncrono . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.2.3 Modo de operación supersíncrono . . . . . . . . . . . . . . . . . . 22
2.2.3 Modelado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Emulador de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4 Control vectorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4.1 Orientado al vector de flujo del estator . . . . . . . . . . . . . . . . . . . . . . 28
2.4.2 Orientado al vector de voltaje del estator . . . . . . . . . . . . . . . . . . . . . 34
3. Diseño e implementación del prototipo 39
3.1 Descripción del banco de pruebas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2 Estructura del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3.1 Convertidor back-to-back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43

III
3.3.2 Emulador de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4 Implementación etapa de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.1 Convertidor del lado de la máquina . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.2 Convertidor del lado de la red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.4.3 Enlace de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4.4 Convertidor CD/CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.5 Implementación etapa de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.5.1 Selección del microcontrolador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.5.2 Programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.5.3 Implementación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4. Simulaciones y resultados experimentales 63
4.1 Resultados de simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1.1 Variación en la velocidad de operación . . . . . . . . . . . . . . . . . . . . . . 66
4.1.2 Variación en la frecuencia de operación . . . . . . . . . . . . . . . . . . . . . 76
4.1.3 Variación del voltaje en el enlace de CD . . . . . . . . . . . . . . . . . . . . . 78
4.1.4 Potencia carga principal y auxiliar . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.2 Resultados experimentales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.1 Operación a velocidad subsíncrona . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.2.2 Operación a velocidad síncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2.3 Operación a velocidad supersíncrona . . . . . . . . . . . . . . . . . . . . . . . 87
4.2.4 Cambio de velocidad de subsíncrona a supersíncrona . . . . . . . . . . . 88
4.2.5 Cambio de velocidad de supersíncrona a subsíncrona . . . . . . . . . . . 89
5. Conclusiones y trabajos futuros 91
5.1 Conclusiones particulares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.2 Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
IV
Referencias 97
Anexos 103
A. Modelado de la DFIM 103
A.1 Modelo trifásico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
A.2 Modelo en el marco de referencia arbitrario . . . . . . . . . . . . . . . . . . . . . . . . 107
B. Códigos 109
B.1 Control del convertidor del lado de la máquina . . . . . . . . . . . . . . . . . . . . . . 109
B.2 Control del convertidor del lado de la red . . . . . . . . . . . . . . . . . . . . . . . . . . 112
B.3 Control del convertidor CD/CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
C. Librerías de simulación 117
C.1 Sistema de generación eoloeléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
C.2 Máquina de inducción doblemente alimentada . . . . . . . . . . . . . . . . . . . . . . 119
C.3 Motor de corriente directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
C.4 Convertidor back-to-back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
C.5 Control MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
C.6 Control GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123

Notación
V
Letras mayúsculas
B Coeficiente de fricción del DFIG
Bm Coeficiente de amortiguamiento del motor de CD
Co Capacitor del enlace de CD
Iaux Corriente en la carga auxiliar
Ic Corriente en el enlace de CD
Io1 Corriente de salida del enlace de CD al MSC
Io2 Corriente de salida del enlace de CD al GSC
J Inercia del DFIG
Jm Inercia del rotor del motor de CD
La Inductancia del devanado de armadura
Laf Inductancia de acoplamiento mutuo entre armadura y campo
Lf Inductancia del devanado de campo
LL Inductancia de la carga
Llr Inductancia de dispersión del devanado rotórico

VI
Lls Inductancia de dispersión del devanado estatórico
Lm Inductancia magnetizante
Lr Inductancia del rotor
Ls Inductancia del estator
Lsr Inductancia mutua entre los devanados de estator y rotor
M Inductancia mutua bifásica
P Número de polos
Paux Potencia en la carga auxiliar
PGen Potencia generada
PL Potencia activa en la carga
Pm Potencia mecánica del eje
Pr Potencia en el rotor
Ps Potencia en el estator
QL Potencia reactiva en la carga
Raux Resistencia de la carga auxiliar
RL Resistencia de la carga principal
Rr Resistencia del devanado rotórico
Rs Resistencia del devanado estatórico
Tcy Tiempo muerto
Te Par electromagnético
Vo Voltaje en el enlace de CD
Y Conexión en estrella
Letras minúsculas
abc Coordenadas trifásicas
dq Coordenadas del marco de referencia arbitrario

VII
fe Frecuencia eléctrica deseada en el estator
fmsync Frecuencia mecánica del rotor
fpwm Frecuencia de conmutación
fre Frecuencia eléctrica de las señales del rotor
gg Señales de compuerta para el GSC
gr Señales de compuerta para el MSC
ims Corriente de magnetización del estator
ims* Corriente de magnetización estatórica deseada
ipico Corriente pico de carga
iqr,dr Corrientes del rotor en coordenadas dq
iqr,dr* Corrientes del rotor deseadas en coordenadas dq
iqs,ds Corrientes en el estator en coordenadas dq
iqs,ds* Corrientes en el estator deseadas en coordenadas dq
ir Corriente en el rotor
is Corriente en el estator
m Índice de modulación
nm Velocidad mecánica
nmsync Velocidad síncrona mecánica
ra Resistencia del devanado de campo
rf Resistencia del devanado de armadura
s Deslizamiento del DFIG
vdr,qr Voltajes en el rotor en coordenadas dq
vdr,qr* Voltajes en el rotor deseados en coordenadas dq
vds,qs Voltajes en el estator en coordenadas dq
vds,qs* Voltajes en el estator deseados en coordenadas dq
vmag Magnitud del voltaje
vpos Posición angular del voltaje

VIII
vr Voltaje en el rotor
vs Voltaje en el estator
Letras griegas
αβ Coordenadas del marco de referencia fijo
θe Posición del vector de flujo del estator
θm Posición angular mecánica del eje del rotor
θr Posición del vector de flujo del rotor
λdr,qr Vector de flujo del rotor en coordenadas dq
λds,qs Vector de flujo del estator en coordenadas dq
λr Vector de flujo del rotor
λs Vector de flujo del estator
σ Factor de dispersión
σs Posición del vector de flujo del estator
ω Velocidad del marco de referencia utilizado
ωe Frecuencia angular deseada en el estator
ωm Frecuencia angular
ωmsync Frecuencia angular en el rotor
ωr Velocidad angular de rotación
ωsinc Velocidad síncrona
ωslip Velocidad angular de deslizamiento
Acrónimos
ASG Generador asíncrona

IX
AS-WECS Sistema de conversión de energía eólica de velocidad ajustable
BDFIM Máquina de inducción doblemente alimentada sin escobillas
BDFRM Máquina de reluctancia doblemente alimentada
CA Corriente alterna
CD Corriente directa
CDDFIM Máquina de inducción doblemente alimentada en cascada
CENIDET Centro Nacional de Investigación y Desarrollo Tecnológico
CFE Comisión Federal de Electricidad
CIPOS Sistema de potencia integrado
CONAE Comisión Nacional para el Ahorro de Energía
DFIG Generador de inducción doblemente alimentado
DFM Máquina doblemente alimentada
DSC Controlador digital de señal
DSP Procesador digital de señal
EMI Interferencia electromagnética
FEC Convertidor front-end
FS-WECS Sistema de conversión de energía eólica de velocidad fija
GB Caja de engranes
GSC Convertidor del lado de la red
IG Generador de inducción
IGBT Transistor bipolar de compuerta aislada
MCU Microcontrolador
MSC Convertidor del lado de la máquina
PI Control proporcional-integral
PWM Modulación por ancho de pulso
PWSM Máquina síncrona de imanes permanentes
SCIG Generador de inducción con caja de engranes

X
SCIM Máquina de inducción de jaula de ardilla
SCR Rectificador controlado de silicio
SG Generador con caja de engranes
VF Perfil volts-hertz
VRM Máquina de reluctancia variable
VSCF Velocidad variable y frecuencia constante
VS-WECS Sistema de conversión de energía eólica de velocidad variable
WECS Sistema de conversión de energía eólica
WRIM Máquina de inducción con rotor bobinado
WRSM Máquina síncrona de rotor devanado
WT Turbina eólica

Lista de figuras
XI
1.1 Clasificación de los sistemas de conversión de energía eólica . . . . . . . . . . . . . . 6
1.2 Sistema de conversión de energía eólica de velocidad fija típico . . . . . . . . . . . . 6
1.3 Algunos tipos de sistemas WEC de velocidad variable . . . . . . . . . . . . . . . . . . . 7
1.4 Sistema de conversión de energía eólica de velocidad fija típico . . . . . . . . . . . . 8
1.4 (a) Manejo de potencia total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 (b) Manejo de potencia parcial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Clasificación de las máquinas doblemente alimentadas . . . . . . . . . . . . . . . . . . . 9
1.6 Diagrama del flujo de potencia en la DFIM, de acuerdo con las condiciones
de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7 Generador de rotor devanado con carga aislada . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.8 Sistema WEC con máquina de inducción doblemente alimentada . . . . . . . . . . 13
1.9 Sistema de conversion de energía eoloeléctrica alimentando una carga aislada . 14
2.1 Convertidor back-to-back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Flujo de energía en el generador durante la operación a velocidad subsíncrona . 21
2.3 Flujo de energía en el generador durante la operación a velocidad síncrona . . . 22

XII
2.4 Flujo de energía en el generador durante la operación a velocidad
supersíncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.5 Propuesta de solución para el emulador de carga . . . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Diagrama a bloques del control vectorial clásico aplicado a una máquina de
inducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.7 Diagrama de bloques utilizado en el diseño de los controladores de corriente
del MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.8 Diagrama de bloques utilizado en el diseño del controlador de voltaje
generado en el estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.9 Estructura del control vectorial para el MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.10 Diagrama de bloques utilizado en el diseño de los controladores de corriente
del GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.11 Diagrama de bloques utilizado en el diseño del controlador de voltaje en el
enlace de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.12 Convertidor del lado de la red . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.13 Estructura del control vectorial para el GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1 Banco de máquinas eléctricas de DE LORENZO . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Sistema de generación eoloeléctrica implementado experimentalmente . . . . . . 42
3.3 Módulos para la construcción del convertidor back-to-back . . . . . . . . . . . . . . . 43
3.4 Módulos para la construcción del emulador de carga . . . . . . . . . . . . . . . . . . . . . 45
3.5 Esquemático para el MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.6 Esquemático para el módulo CiPoS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7 Esquemático para el GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.8 Implementación de la placa para los convertidores . . . . . . . . . . . . . . . . . . . . . . 48
3.9 Esquemático para el enlace de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.10 Implementación del convertidor back-to-back . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.11 Esquemático del emulador de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51

XIII
3.12 Esquemático de la carga auxiliar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.13 Implementación del emulador de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.14 Diagrama de flujo para el control del MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.15 Diagrama de flujo para el control vectorial del MSC . . . . . . . . . . . . . . . . . . . . . 56
3.16 Diagrama de flujo para el control del GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.17 Diagrama de flujo para el control vectorial del GSC . . . . . . . . . . . . . . . . . . . . . 57
3.18 Diagrama de flujo para el control de la carga auxiliar . . . . . . . . . . . . . . . . . . . . 58
3.19 Diagrama de flujo para el control del convertidor . . . . . . . . . . . . . . . . . . . . . . . 59
3.20 Esquemático para la placa de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.21 Implementación de la placa de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.1 Velocidad de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.2 Voltaje y corriente en el rotor, estator y en el GSC a velocidad subsíncrona . . . 67
4.3 Potencias activa y reactiva en la carga y en el rotor a velocidad subsíncrona . . 68
4.4 Voltaje y corriente en el rotor, estator y en el GSC a velocidad síncrona . . . . . 69
4.5 Potencias activa y reactiva en la carga y en el rotor a velocidad síncrona . . . . . 69
4.6 Voltaje y corriente en el rotor, estator y en el GSC a velocidad supersíncrona . 70
4.7 Potencias activa y reactiva en la carga y en el rotor a velocidad supersíncrona . 71
4.8 Incremento en la velocidad de operación, velocidad subsíncrona aa
supersíncrona (1800rpm a 2000rpm) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.9 Voltaje y corriente en el rotor, estator y en el GSC de subsíncrona aa
supersíncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.10 Potencias activa y reactiva en la carga y en el rotor de subsíncrona aa
supersíncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.11 Decremento en la velocidad de operación, velocidad supersíncrona aa
subsíncrona (2000rpm a 1800rpm) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.12 Voltaje y corriente en el rotor, estator y en el GSC de supersíncrona aa
subsíncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

XIV
4.13 Potencias activa y reactiva en la carga y en el rotor de supersíncrona aa
subsíncrona . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.14 Recuperación de energía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.15 Decremento en la frecuencia de operación (60Hz a 50Hz) . . . . . . . . . . . . . . . . . 76
4.16 Voltaje y corriente en el estator, rotor y en el GSC de 60Hz a 50Hz . . . . . . . . . 77
4.17 Potencias activa y reactiva en la carga y en el rotor de 60Hz a 50Hz . . . . . . . . . 78
4.18 Decremento en el voltaje del enlace de CD (800V a 700V) . . . . . . . . . . . . . . . . 78
4.19 Voltaje y corriente en el estator, rotor y en el GSC de 800V a 700V . . . . . . . . . 79
4.20 Potencias activa y reactiva en la carga y en el rotor de 800V a 700V . . . . . . . . 79
4.21 Potencia activa en la carga principal y carga auxiliar . . . . . . . . . . . . . . . . . . . . . 81
4.22 Banco de pruebas de generación eoloeléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.23 Señales PWM generadas por el dsPIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.24 Detalle de tiempos muertos en el PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.25 Voltaje y corriente en el rotor a velocidad subsíncrona . . . . . . . . . . . . . . . . . . . 84
4.26 Voltaje y corriente en el estator a velocidad subsíncrona . . . . . . . . . . . . . . . . . . 84
4.27 Voltaje en el enlace de CD a velocidad subsíncrona . . . . . . . . . . . . . . . . . . . . . 85
4.28 Voltaje y corriente en el rotor a velocidad síncrona . . . . . . . . . . . . . . . . . . . . . . 86
4.29 Voltaje y corriente en el estator a velocidad síncrona . . . . . . . . . . . . . . . . . . . . . 86
4.30 Voltaje en el enlace de CD a velocidad síncrona . . . . . . . . . . . . . . . . . . . . . . . . 86
4.31 Voltaje y corriente en el rotor a velocidad supersíncrona . . . . . . . . . . . . . . . . . . 87
4.32 Voltaje y corriente en el estator a velocidad supersíncrona . . . . . . . . . . . . . . . . 87
4.33 Voltaje en el enlace de CD a velocidad supersíncrona . . . . . . . . . . . . . . . . . . . . . 88
4.34 Voltaje y corriente en el rotor de subsíncrona a supersíncrona . . . . . . . . . . . . . . 89
4.35 Voltaje en el enlace de CD de subsíncrona a supersíncrona . . . . . . . . . . . . . . . . 89
4.36 Voltaje y corriente en el rotor de subsíncrona a supersíncrona . . . . . . . . . . . . . . 90
4.37 Voltaje en el enlace de CD de subsíncrona a supersíncrona . . . . . . . . . . . . . . . . 90

XV
A.1 Diagrama de la máquina de inducción doblemente alimentada . . . . . . . . . . . . . 104
C.1 Sistema de conversión de energía eoloeléctrica aislado . . . . . . . . . . . . . . . . . . . 118
C.2 Sistema de generación eoloeléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
C.3 Máquina de inducción doblemente alimentada . . . . . . . . . . . . . . . . . . . . . . . . . . 119
C.4 Motor de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
C.5 Modelo para el MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
C.6 Modelo para el GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
C.7 Modelo para el enlace de CD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
C.8 Controlador para el MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
C.9 Controlador del GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124

XVI

Lista de tablas
XVII
1.1 Comparación de pérdidas en los diferentes tipos de sistemas de conversión . . . 12
3.1 Parámetros de la DFIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2 Rangos de operación de la DFIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3 Especificaciones del convertidor back-to-back para el banco de pruebas . . . . . 44
3.4 Modelos de dispositivos dsPIC30F para el control de motores . . . . . . . . . . . . . 54
3.5 Modelos de dispositivos dsPIC30F para el control de motores . . . . . . . . . . . . . 54
4.1 Parámetros del DFIG para simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.2 Parámetros del motor de CD para simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3 Velocidad de operación de la DFIM para simulación . . . . . . . . . . . . . . . . . . . . . 65
4.4 Controladores para el MSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.5 Controladores para el GSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.6 Valores para la carga principal y auxiliar en simulación . . . . . . . . . . . . . . . . . . 80
C.1 Entradas y salidas de la función IsWECS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119

XVIII

CAPÍTULO 1
1
Introducción
La creciente demanda mundial de energía eléctrica hace necesaria la investigación de
nuevas formas de generación que utilicen fuentes alternas de energía, como la energía solar,
geotérmica, eólica e hidráulica.
Actualmente la energía eólica es una fuente renovable que se encuentra en desarrollo y
se está utilizando ampliamente a nivel mundial con el fin de obtener el mayor
aprovechamiento. El avance tecnológico y científico ha permitido el desarrollo de sistemas
más eficientes y económicamente competitivos frente a los sistemas tradicionales basados
en combustibles fósiles [1].
Entre los países con mayor capacidad eólica se encuentra con el liderazgo Alemania,
seguido por España, Estados Unidos, Dinamarca e India, donde en todos éstos se encuentra
desarrollado casi el 80% de la capacidad total de generación eoloeléctrica existente [2].
A finales del año 2006 alrededor del mundo existían aproximadamente 55GW de
capacidad de potencia. Se espera que para el año 2010 la capacidad de potencia instalada
alrededor del mundo sea de 150GW.

Sistema de generación eoloeléctrica
CENIDET 2
Cualquier sistema que transforma la energía del viento en otro tipo de energía, con el
fin de aprovecharla para realizar algún trabajo, se define como sistema de conversión de
energía eólica (Wind Energy Conversion System: WECS).
Dado que los sistemas de conversión eoloeléctrica constan, entre otros componentes, de
una turbina eólica (Wind Turbine: WT) y un generador eléctrico, se usa también el término
aerogenerador como un sinónimo de WECS.
Los sistemas de generación eoloeléctrica se dividen en conectados a la red y aislados;
dependiendo de la aplicación. En el primer caso la energía producida por los generadores es
inyectada a la red eléctrica. Por otra parte, la aplicación aislada se utiliza en lugares
remotos donde no existe la posibilidad de conectar los generadores a la red o cuando la
potencia generada por el sistema es suficiente para el tipo de carga conectada.
La diferencia en el diseño de uno u otro radica en que el conectado a la red debe
mantener y mejorar los parámetros que norman a ésta [3], mientras que los sistemas
aislados deben mantener una generación regulada definida por el tipo de carga que se les
conecta [4]. Además, los sistemas de generación aislada se utilizan en sistemas de
velocidad constante y variable.
En este capítulo se muestra un panorama global de las diferentes etapas que constituyen
un sistema de conversión eoloeléctrica de tipo aislado. La referencia [1] describe un
sistema, el cual esta formado por una máquina de inducción, un convertidor bidireccional
de potencia conectado entre las terminales de la máquina y la carga que se conecta entre el
estator de la máquina y el convertidor.
También, se plantea la problemática del trabajo, la justificación, la hipótesis y los
objetivos. Posteriormente se muestra el estado del arte en este campo de investigación y por
último se presenta la organización del documento.
1.1 Antecedentes
La energía eólica se ha aprovechado desde tiempos remotos, en aplicaciones tan
variadas como: propulsión de navíos, molinos, sistemas de bombeo de agua, etc. Sin

Capítulo 1. Introducción
Dana Luz González Ojeda 3
embargo, el uso de la energía eólica para generar electricidad es más reciente, apareciendo
a finales del siglo XIX, cuando Charles F. Brush construyó la que hoy se cree es la primera
turbina eólica para generación de electricidad, principalmente para cargar baterías [5].
La generación eoloeléctrica ha tenido un avance y desarrollo substancial en los últimos
10 años, la mayor parte en Europa. Por ejemplo, en Dinamarca se genera más del 20% de
su consumo total mediante energía eólica, equivalente a 4GW [6].
México cuenta con 105 aerogeneradores, los cuales producen 85.48MW de capacidad
de potencia, que equivale al 0.17% del consumo total de energía eléctrica en el país [7].
Existen diversos estudios acerca de la capacidad total que se puede instalar en el territorio
nacional, dentro de los cuales la Secretaría de Energía y la Comisión Nacional de Energía
estiman capacidades entre 3 y 5GW [8]. En años recientes se han realizado diversos
estudios que han permitido determinar el potencial eólico en diferentes estados de la
Republica Mexicana.
1.2 Planteamiento del problema
La obtención de energía eléctrica mediante generación eólica se ha incrementado de
manera importante durante la última década. En los países industrializados la tecnología
eoloeléctrica es económicamente competitiva.
En México se tienen diversos sitios con gran potencial eólico, principalmente en los
estados de Zacatecas, Veracruz, Sinaloa, Hidalgo, Quintana Roo, Baja California y Oaxaca,
en este último se tienen las mejores expectativas. En contraste con lo anterior, la Comisión
Federal de Electricidad (CFE) sólo cuenta con la planta eoloeléctrica piloto “La Venta”
ubicada en La Ventosa, Oaxaca. Además, existen diversas instalaciones de baja potencia en
apoyo a pequeñas comunidades en los estados de Oaxaca, Baja California Sur, Chihuahua,
Quintana Roo y Yucatán, en el marco de un convenio de colaboración entre el Gobierno
Mexicano y el Departamento de Energía de los Estados Unidos.
Dado el panorama tan alentador en el país por generar más electricidad por medios
eólicos y las pocas plantas instaladas en el país existe la necesidad de Investigación y

Sistema de generación eoloeléctrica
CENIDET 4
Desarrollo Tecnológico en el tema, por lo que los estudios recientemente realizados en
CENIDET sobre la conversión de energía eoloeléctrica, presentan un panorama alentador
para estudiar más a fondo los sistemas de conversión de energía eólica, teniendo en primer
lugar una conexión del tipo aislado y posteriormente contemplar la posibilidad de conectar
el sistema a la red eléctrica nacional.
1.3 Justificación
Hoy en día esta creciendo a nivel mundial la demanda de sistemas de generación
eléctrica basados en fuentes alternativas y renovables. Algunas de las principales razones
han sido motivadas por la creciente demanda de energía eléctrica, el incremento en los
costos de los combustibles fósiles, la contaminación, el calentamiento global, etc.
Actualmente, la energía eólica es la única fuente alternativa económicamente viable a
gran escala, ya que en sitios con buenos recursos eólicos es posible obtener costos más
bajos que los correspondientes a la mejor tecnología de generación con combustible.
Para estudiar los sistemas eoloeléctricos en un lugar donde no se cuenta con el recurso
natural del viento, son necesarios bancos de prueba a pequeña escala donde se reproduzcan
las mismas condiciones de operación a las que se ven sometidos los sistemas de generación
eoloeléctrica en una aplicación real. Por lo que, este trabajo se enfoca en completar el
banco de pruebas existente en CENIDET, basado en un generador de inducción doblemente
alimentado y un convertidor back-to-back con conexión a un emulador de carga,
permitiendo así tener un sistema aislado [9].
1.4 Objetivos
1.4.1 Objetivo general
Este trabajo de investigación tiene como objetivo general completar un banco de
pruebas de un sistema de generación eoloeléctrica basado en el generador de inducción
doblemente alimentado con convertidor back-to-back en operación aislada.
Capítulo 1. Introducción
Dana Luz González Ojeda 5
1.4.2 Objetivos particulares
• Diseñar e implementar experimentalmente el convertidor del lado de la máquina
(MSC) del sistema eoloeléctrico.
• Diseñar e implementar experimentalmente el convertidor del lado de la red (GSC)
del sistema eoloeléctrico.
• Diseñar e implementar experimentalmente un emulador de carga para el sistema
eoloeléctrico.
1.5 Hipótesis
Colocando un convertidor back-to-back en un sistema de generación eoloeléctrica
aislado basado en un generador de inducción doblemente alimentado, se pueden reproducir
diferentes condiciones de operación manteniendo la frecuencia y el voltaje constante en el
estator del generador.
1.6 Estado del arte
En esta sección se presenta el estado del arte sobre los diferentes tipos de sistemas de
conversión eoloeléctrica y también se mencionan diferentes alternativas que existen para su
construcción.
1.6.1 Sistemas de conversión de energía eólica
Inicialmente los sistemas eólicos fueron diseñados para operar a velocidad variable y
producir corriente continua, principalmente para cargar baterías y utilizarla en lugares
remotos y aislados.
La corriente alterna se impuso a la directa y hubo necesidad de normalizar en lo
referente a la amplitud y frecuencia de las señales alternas. Entonces, dada la naturaleza del
viento, los sistemas eólicos se construyeron para funcionar a velocidad variable y producir
frecuencia constante, con el objetivo de facilitar el diseño del sistema y su conexión con la
red eléctrica. En casos de inestabilidad en la red, la turbina se desconectaba.

Sistema de generación eoloeléctrica
CENIDET 6
Conforme fue creciendo la potencia instalada de energía eólica, las turbinas cumplieron
con el requisito de ayudar a estabilizar la red eléctrica. Para ello, se necesitan turbinas con
mejores técnicas de control y conocer el comportamiento de la red eléctrica a la que se
conecta [5]. La Figura 1.1 muestra la clasificación de los sistemas de conversión de energía
eólica.
Sistemas de
conversión de
energía eólica
Velocidad fija
Velocidad
variable
Potencia
total
Potencia
parcialDFIG
Con caja de
engranes
Sin caja de engranes PWSM
SCIG
SG
Figura 1.1 Clasificación de los sistemas de conversión de energía eólica.
1.6.1.1 Sistema de velocidad fija
Los sistemas de velocidad fija (Fixed Speed-WECS: FS-WECS) fueron de los primeros
que se utilizaron para producir energía eléctrica alterna de frecuencia constante. En su
forma más básica, estos sistemas constan de una máquina de inducción de jaula de ardilla
(SCIM), operando como generador, conectada en forma directa a la red. En este tipo de
aplicaciones la SCIM se llama comúnmente generador asíncrono (ASG) o, simplemente,
generador de inducción (IG). La turbina eólica (WT) que impulsa al generador está
conectada a éste por medio de un juego de engranes de relación fija [4]. En la Figura 1.2 se
muestra el diagrama simplificado de un sistema de velocidad fija.
Red
Compensación
ASG
PGenPm
Figura 1.2 Sistema de conversión de energía eólica de velocidad fija típico.
Capítulo 1. Introducción
Dana Luz González Ojeda 7
Las ventajas de los sistemas de velocidad fija son su simplicidad y su bajo costo. La
desventaja es que se requiere un diseño mecánico resistente a las altas ráfagas de viento,
donde se observan variaciones apreciables en la potencia de salida.
1.6.1.2 Sistemas de velocidad variable
Los sistemas de velocidad variable (Variable Speed-WECS: VS-WECS) son también
llamados de velocidad ajustable (Adjustable Speed-WECS: AS-WECS). Para implementar
un VS-WECS existe una amplia gama de alternativas, ya que pueden utilizarse diferentes
tipos de generadores en combinación con diversos convertidores electrónicos de potencia.
Los tipos de máquinas que pueden utilizarse son: la máquina de inducción de jaula de
ardilla (SCIM), las máquinas doblemente alimentadas (DFM), la máquina síncrona de rotor
devanado (WRSM), la máquina síncrona de imanes permanente (PWSM) y la máquina de
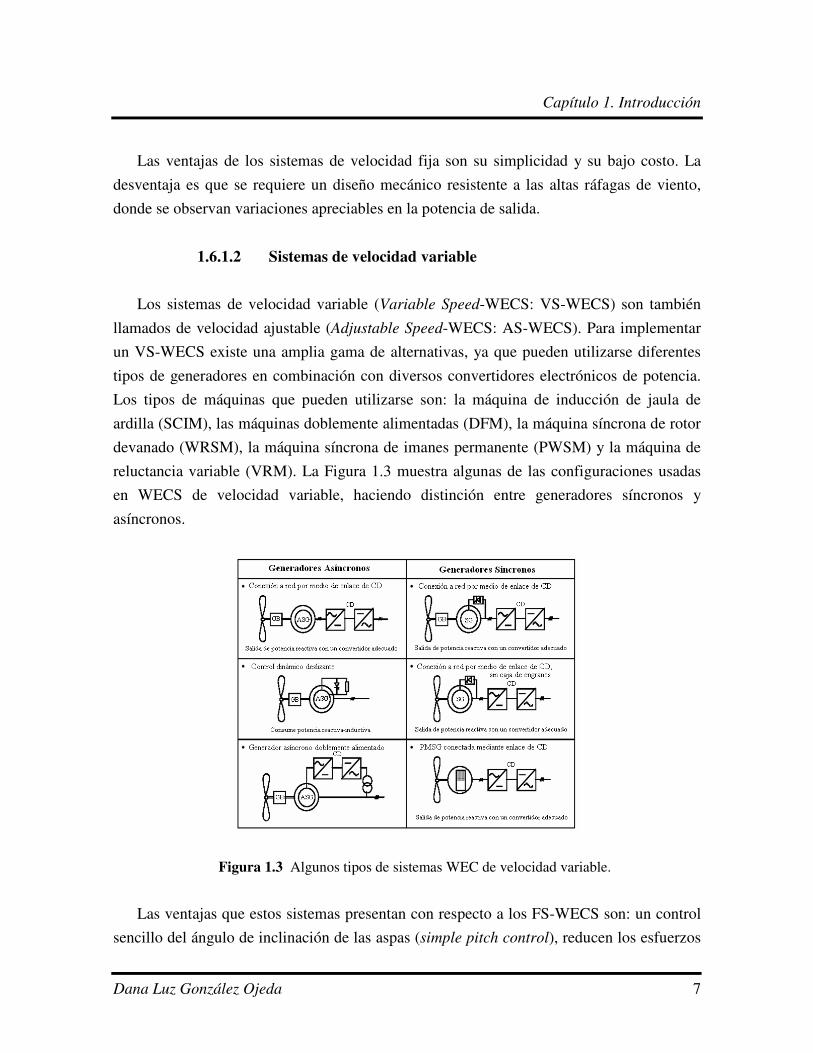
reluctancia variable (VRM). La Figura 1.3 muestra algunas de las configuraciones usadas
en WECS de velocidad variable, haciendo distinción entre generadores síncronos y
asíncronos.
Figura 1.3 Algunos tipos de sistemas WEC de velocidad variable.
Las ventajas que estos sistemas presentan con respecto a los FS-WECS son: un control
sencillo del ángulo de inclinación de las aspas (simple pitch control), reducen los esfuerzos

Sistema de generación eoloeléctrica
CENIDET 8
mecánicos, compensan dinámicamente la potencia de salida, mejoran la calidad de potencia
y la eficiencia del sistema (hasta 10%), reducen el ruido acústico y tienen la capacidad de
operar aisladamente.
Tomando como base la Figura 1.4, se puede dar una clasificación amplia de los
sistemas VS-WEC, de acuerdo con la ubicación y capacidad del convertidor electrónico de
potencia [5]. De esta forma, los VS-WECS pueden ser de capacidad de manejo de potencia
total (full power handling) o de potencia parcial (partial power handling).
a)
Manejo de potencia total
b)
Manejo de potencia parcial
Figura 1.4 Sistema de conversión de energía eólica de velocidad fija típico.
Los sistemas VS-WECS de capacidad de manejo de potencia total (también llamados
directos en línea, direct-in-line) están formados por un generador de inducción o síncrono,
que produce potencia de CA con frecuencia variable y un convertidor de potencia
conectado en serie, que transforma la potencia de CA para obtener frecuencia constante,
mostrado en la Figura 4a. Debido a esta conexión el convertidor tiene que manejar la
potencia total que sale del generador. Las desventajas de esta configuración son: alto costo
tanto del convertidor de potencia como de los filtros de salida y de EMI. Además, la
eficiencia del convertidor afecta considerablemente la eficiencia total del sistema [4] y [10].
Los sistemas WEC de capacidad de manejo de potencia parcial son aquellos que están
constituidos por una DFM con un convertidor CA-CA de cuatro cuadrantes, conectado a los
devanados de un circuito secundario, como el que se muestra en la Figura 1.4b. Con esta
conexión y las características propias de las DFM, el convertidor electrónico se diseña para
manejar una fracción de la potencia generada, no más del 50%. Sus ventajas son: costo
reducido del convertidor y de los filtros; la eficiencia del sistema se mejora, el control del

Capítulo 1. Introducción
Dana Luz González Ojeda 9
factor de potencia puede efectuarse a más bajo costo. Además, es posible realizar un control
desacoplado de las potencias activa y reactiva del generador [4] y [10].
1.6.2 Máquinas doblemente alimentadas
Los sistemas de generación eoloeléctrica tienen una máquina doblemente alimentada, la
cual se caracteriza por recibir alimentación por el devanado estatórico y por un circuito
secundario, asociado con el rotor o con otro estator [11]. En ambos casos es posible
recuperar energía al conectar al circuito secundario un convertidor electrónico de potencia,
que se diseña para manejar una fracción de la potencia total de la máquina. De hecho, la
potencia que tendrá que manejar dicho convertidor dependerá del rango de velocidades al
que opere la máquina. La Figura 1.5 presenta una clasificación de este tipo de máquinas.
Máquinas
doblemente
alimentadas
Con escobillas
Sin escobillas
Máquina de inducción doblemente alimentada (Doubly Fed
Induction Machine: DFIM)
Máquina de inducción doblemente alimentada en cascada
(Cascaded Doubly Fed Induction Machine: CDFIM)
Máquina de inducción doblemente alimentada sin escobillas
(Brushless Doubly Fed Induction Machine: BDFIM)
Máquina de reluctania doblemente alimentada sin escobillas
(Brushless Doubly Fed Reluntance Machine: BDFRM)
Figura 1.5 Clasificación de las máquinas doblemente alimentadas.
Con el avance de la tecnología han surgido nuevos esquemas de generación a velocidad
variable, entre ellos están los sistemas que utilizan máquinas de inducción doblemente
alimentadas (DFIM) [11]. La principal ventaja de este tipo de máquinas es que permiten el
control del voltaje y la frecuencia generada a partir de la adecuada manipulación de las
corrientes en el circuito rotórico de la máquina. Además según los modos de operación
mostrados en la Figura 1.6, se puede observar que permiten inclusive una generación
eléctrica por el circuito de rotor a velocidades superiores a la síncrona.
La máquina de inducción doblemente alimentada es una máquina de inducción con
rotor bobinado (Wound Rotor Induction Machine: WRIM). La conexión eléctrica de los

Sistema de generación eoloeléctrica
CENIDET 10
devanados del rotor se realiza por medio de escobillas y anillos deslizantes. En aplicaciones
de sistemas de generación eoloeléctrica de velocidad variable y frecuencia constante
(VSCF), como es el caso de los sistemas WEC, el estator suele estar conectado
directamente a la red o a la carga, mientras que el rotor lo hace a través de un convertidor
electrónico de potencia de cuatro cuadrantes [12].
Figura 1.6 Diagrama del flujo de potencia en la DFIM, de acuerdo con las condiciones de
operación.
Donde Ps es la potencia en el estator, Pr en el rotor y Pm es la potencia mecánica en el
eje.
La DFIM es la máquina a la que más atención se le ha dedicado dentro de la conversión
eoloeléctrica y, de acuerdo con los resultados obtenidos, puede presentar un desempeño
dinámico excelente utilizando un control adecuado. Las investigaciones realizadas tratan
desde diferentes estrategias de control, hasta la utilización de diversas topologías de
conversión de potencia en el circuito del rotor. La DFIM es utilizada ya que puede generar
voltaje y frecuencia constante a velocidad variable.
1.6.3 Convertidores bi-direccionales de potencia
Para efectuar el control de la DFIM suele utilizarse un convertidor electrónico de
potencia CA-CA en su circuito rotórico [13]. El convertidor debe ser capaz de proporcionar
a los devanados del rotor un conjunto trifásico de señales con cualquier amplitud, fase y
frecuencia.
Capítulo 1. Introducción
Dana Luz González Ojeda 11
Es deseable que el convertidor tenga las características que se mencionan a
continuación [14].
•••• Manejar un flujo bi-direccional de potencia, esto ocurre debido a que la máquina
puede consumir o producir energía en su circuito secundario, dependiendo de las
condiciones de operación, tal como se muestra en la Figura 6.
•••• Permitir la disminución o eliminación de armónicos inyectados a la red.
•••• Permitir el control del factor de potencia de las señales entregadas a la red,
ajustando las potencias activa y reactiva generadas por el DFIG, al mismo tiempo
que regula su velocidad, de acuerdo con el par impulsor y alguna estrategia de
control.
•••• Ser capaz de proporcionar una salida de voltaje que no fatigue en exceso los
devanados a los cuales se conecta.
•••• Tener una elevada eficiencia en el proceso de conversión.
•••• Tolerar la utilización de una considerable cantidad de cable entre el convertidor y la
máquina (más de 40m).
•••• Ser capaz de responder rápidamente a las señales de control para permitir el control
apropiado de la máquina.
Con el desarrollo de los dispositivos semiconductores de potencia se han utilizado
diferentes tipos de convertidores electrónicos en el circuito rotórico. Se han usado, entre
otros, convertidores con enlace de CD (DC-Link converters) con base en dispositivos SCR
(Silicon-Controlled Rectifier), cicloconvertidores, convertidores back-to-back y de matriz,
entre otros. El convertidor back-to-back es el más estudiado dentro de los sistemas de
conversión eoloeléctrica, ya que ofrece las siguientes características [4]:

Sistema de generación eoloeléctrica
CENIDET 12
• Costo reducido de los convertidores: Ya que consume menos del 50% de la
potencia total del sistema, esto se tiene por la configuración del sistema que es de
manejo de potencia parcial, como se muestra en la Figura 1.4b.
• Costo reducido de los filtros del convertidor y los filtros EMI: Esto se obtiene
porque el sistema sólo maneja una fracción de la potencia total que se genera.
• Se mejora la eficiencia: La Tabla 1.1 muestra una comparación de las pérdidas
generadas en los diferentes tipos de sistemas de generación eoloeléctrica. En esta
tabla se observa una disminución de las pérdidas al utilizar este tipo de convertidor
en una configuración de manejo de potencia parcial.
Tabla 1.1 Comparación de pérdidas en los diferentes tipos de sistemas de conversión.
Pérdidas Sistema de conversión
de energía eólica Generador Convertidor
Velocidad variable y
manejo de potencia total
con convertidor back-to-back
3.5% 3%
Velocidad variable y
manejo de potencia parcial
con convertidor back-to-back
3.5% 0.75%
1.6.4 Emuladores de carga
Los sistemas eólicos de tipo aislado deben considerar las condiciones en las cuales la
potencia que se genera excede a la potencia que puede consumir la carga, generalmente los
sistemas WEC deben regular el flujo de potencia entre el generador y la carga, pero cuando
esto no sucede, se deben utilizar diferentes esquemas para la carga [15].
Uno de estos esquemas es utilizar una carga auxiliar conectada en paralelo a la carga
principal como se muestra en la Figura 1.7, la carga adicional debe consumir el exceso de

Capítulo 1. Introducción
Dana Luz González Ojeda 13
potencia que se genera [16] y [17]. En [18], se propone que la carga auxiliar sea un
rectificador con un filtro de entrada que alimente una carga resistiva controlada (chopper).
Figura 1.7 Generador de rotor devanado con carga aislada.
Otro esquema para solucionar el excedente de la potencia que se genera es como el que
se muestra en la Figura 1.8, el sistema considera 3 tipos de cargas: la primera una carga
principal trifásica, la segunda una carga auxiliar que se usa para el control del flujo de
potencia y por último un volante de inercia que sirve para almacenar energía.
Figura 1.8 Sistema WEC con máquina de inducción doblemente alimentada.
La carga auxiliar debe equilibrar la potencia generada del sistema [19], la naturaleza de
la carga auxiliar depende de la aplicación, algunos ejemplos comunes son: calefacción,
bombeo de agua para riego y carga de baterías.
La energía que almacena el volante de inercia cuando hay un exceso de potencia sirve
cuando el sistema no genere la potencia requerida por la carga principal y entonces el
volante de inercia la suministra, o también esta potencia almacenada puede utilizarse en
otra aplicación.

Sistema de generación eoloeléctrica
CENIDET 14
1.7 Propuesta de solución
Se propone diseñar e implementar experimentalmente un sistema de generación
eoloeléctrica basado en la máquina de inducción doblemente alimentada (DFIM) con
convertidor reversible back-to-back y del tipo aislado, para la carga se propone un
emulador de carga conformado por una carga principal y una carga auxiliar, la cual esta
formada por un diodo rectificador que a través de un convertidor CD/CD alimenta un banco
resistivo.
El convertidor y el emulador complementan el banco de pruebas de generación
eoloeléctrica existente en CENIDET desarrollado en [20]. La Figura 1.9 muestra un
diagrama general del sistema propuesto.
Figura 1.9 Sistema de conversion de energía eoloeléctrica alimentando una carga aislada.
1.8 Organización del documento
Este documento esta constituido por cinco capítulos, los cuales muestran el desarrollo,
análisis, resultados y conclusiones del trabajo de investigación. A continuación se describe
brevemente el contenido expuesto en cada capítulo.
El Capítulo dos presenta el análisis y los modelos de cada uno de los elementos que
conforman el sistema de conversión eoloeléctrica propuesto. Además, se mencionan

Capítulo 1. Introducción
Dana Luz González Ojeda 15
generalidades acerca del control vectorial para el convertidor y del control apropiado para
el emulador de carga.
El Capítulo tres presenta el diseño y la implementación experimental del convertidor
back-to-back, del emulador de carga y su respectivo control.
En el Capítulo cuatro se muestran y analizan los resultados obtenidos en simulación y
experimentalmente.
En el Capítulo cinco se presentan las conclusiones y los trabajos futuros propuestos. En
el Anexo A se presentan el modelado de la máquina de inducción doblemente alimentada,
en el Anexo B se muestran los programas realizados para el control del convertidor y
finalmente en el Anexo C se muestran las librerías de simulación desarrolladas en
SIMULINK de MATLAB.

Sistema de generación eoloeléctrica
CENIDET 16

CAPÍTULO 2
17
Sistema de conversión eoloeléctrica
El análisis y modelado de las etapas de un sistema representan un proceso real, con lo
cual se obtiene información que describe su comportamiento. Las simulaciones utilizas
estos modelos para comprender y verificar el funcionamiento del sistema bajo diferentes
condiciones de operación.
En este capítulo se presenta la descripción, modelado y control de cada una de las
etapas que conforman el sistema de generación eoloeléctrica.
2.1 Máquina de inducción doblemente alimentada
Para llevar a cabo la simulación del sistema se necesita modelar a la DFIM, este modelo
fue desarrollado en [20], por lo que las ecuaciones que lo describen se encuentran en el
Anexo A. por lo cual, en esta sección sólo se aborda una descripción de la DFIM.
En los sistemas que utilizan máquinas de inducción doblemente alimentadas la principal
ventaja es que permiten el control del voltaje y la frecuencia generada, a partir de la
adecuada manipulación de las corrientes en el circuito rotórico de la máquina [1], [2].

Sistema de generación eoloeléctrica
CENIDET 18
Una máquina de inducción doblemente alimentada (DFIM) es una máquina de rotor
devanado que recibe alimentación tanto por el estator como por el rotor. Una DFIM puede
ser controlada por medio de un convertidor electrónico de potencia conectado a su estator o
a su rotor. La opción más utilizada es la segunda, debido a que el convertidor sólo tendrá
que procesar una fracción de la potencia total. Las máquinas DFIM pueden ser
consideradas como máquinas con un rango restringido de velocidades de operación. De
hecho, el intervalo de velocidades de operación determina la cantidad de potencia que fluirá
a través del circuito rotórico.
En un sistema de generación eoloeléctrica la DFIM funciona como generador, ya que
convierte la potencia mecánica en eléctrica, cuando opera como generador su acrónimo es
DFIG. Un DFIG puede generar voltajes con frecuencia constante en su estator aún cuando
su velocidad de operación esté cambiando. Esto lo distingue del generador sincrónico, que
requiere operar a velocidad constante cuando se desea producir un voltaje con frecuencia
constante. Sin embargo, en ambas máquinas los campos magnéticos en el entrehierro
producidos tanto por el estator como por el rotor, giran a velocidad síncrona, siendo esta
última impuesta por la frecuencia eléctrica deseada en el estator. En el DFIG la velocidad
síncrona está dada por:
Eléctrica: 2=e e
fω π (2.1)
Mecánicas: 2 2 120
m sync e m sync e m sync e f f n f
P P Pω ω= = = (2.2)
Donde: fe es la frecuencia eléctrica deseada en el estator (Hz), ωe es la frecuencia
angular correspondiente (rad/s), fm sync es la frecuencia mecánica del rotor (rev/s), ωm sync es
la frecuencia angular correspondiente (rad/s), nm sync es la velocidad sincrónica mecánica
(rev/min=rpm) y P es el número de polos de la máquina.
Para cumplir lo dicho anteriormente es necesario que las señales eléctricas alimentadas
al rotor tengan una frecuencia dada por:
=re e
f sf (2.3)

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 19
Donde: fre es la frecuencia eléctrica de las señales del rotor (Hz) y s es el deslizamiento
del DFIG (sin unidades).
En los WECS el DFIG recibe la potencia colectada del viento (Pm) y la transforma en
electricidad. De esta manera, si se ignoran las pérdidas mecánicas y eléctricas, las potencias
trifásicas generadas en el estator y en el rotor respectivamente son:
/(1 )= −s m
P P s (2.4)
/(1 )= −r m
P sP s (2.5)
Nótese que Pm=Ps+Pr y que, mientras en el estator siempre se genera potencia (Ps>0),
en el rotor el signo del deslizamiento determina el sentido del flujo de Pr. De esta forma,
para la operación subsíncrona (s>0) se tiene que Pr<0, indicando que el rotor consume la
potencia, mientras que para la operación supersíncrona (s<0) el rotor genera la potencia
(Pr>0) [21].
2.2 Convertidor back-to-back
Para efectuar el control de la DFIM suele utilizarse un convertidor electrónico de
potencia CA-CA en su circuito rotórico. Además, este convertidor debe permitir el flujo de
potencia en ambas direcciones, es decir debe de ser de cuatro cuadrantes. Esto ocurre
debido a que la máquina puede consumir o producir energía en su circuito secundario,
dependiendo de las condiciones de operación. Comúnmente el convertidor utilizado es el
convertidor back-to-back, debido a que presenta mejores características que otros, estas
características fueron presentadas en el Capítulo 1.
2.2.1 Descripción
El convertidor back-to-back está constituido por dos inversores/rectificadores puente
completo conectados de espalda a través de un enlace de CD capacitivo y es generalmente
implementado con dispositivos IGBT (Insulated Gate Bipolar Transistors) [4]. El
inversor/rectificador conectado al rotor del generador se denomina convertidor del lado de
la máquina (Machine Side Converter: MSC), mientras el que se conecta a la red eléctrica o

Sistema de generación eoloeléctrica
CENIDET 20
a la carga se llama convertidor del lado de la red (Grid Side Converter: GSC, algunas veces
referido como Front-End Converter: FEC) [22]. En la Figura 2.1 se muestra el diagrama
general del convertidor back-to-back.
Figura 2.1 Convertidor back-to-back
El convertidor back-to-back es el convertidor que más ha sido considerado dentro de los
sistemas de generación eoloeléctrica, por lo antes mencionado en el Capítulo 1. El banco de
pruebas existente en CENIDET considera también este tipo de convertidor [20]. Con su
utilización se obtiene la capacidad de controlar independientemente las potencias activa y
reactiva entre las terminales del generador y el GSC, que se generan usando técnicas de
control vectorial [4], [23]. Sin embargo, en este caso se pueden obtener corrientes con baja
distorsión armónica en el estator, en el rotor y en la red o la carga, ya que el GSC controla
el flujo de potencia entre el rotor y la red o la carga, actuando como un filtro activo y así
puede compensar armónicos inyectados por el estator del generador a la red [13]. El
sistema completo está hecho para operar a un factor de potencia unitario. Suele
mencionarse como una ventaja que el capacitor en el enlace de CD permite un control
separado de los dos inversores/rectificadores.
Cada convertidor tiene una función diferente dentro del sistema, el MSC sirve para
controlar al DFIG, mientras que el GSC puede usarse para regular el flujo de potencia entre
el rotor de la máquina y la carga, de tal forma que el convertidor back-to-back solamente
transfiera la potencia recibida, modificando para ello la frecuencia y la amplitud de manera
apropiada, dependiendo de las condiciones de operación del sistema. Este manejo del flujo
de potencia puede obtenerse mediante la regulación del voltaje del enlace de CD, de tal

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 21
forma que, en promedio, el capacitor no almacene ni pierda energía, con lo que se iguala la
potencia activa que entra al enlace con la que sale del mismo. Además, el GSC puede
suministrar potencia reactiva a la red o a la carga, de tal forma que se complemente con la
proporcionada por el estator. Esta podría ser útil en una estrategia de división de potencia
reactiva, cuyo objetivo podría ser la disminución de las pérdidas eléctricas en el DFIG [24],
[25], [26]. Para esta aplicación ambos convertidores se controlan usando técnicas de control
vectorial clásico orientadas a diferentes vectores [23].
2.2.2 Modos de operación
El generador eoloeléctrico con convertidor back-to-back en forma idealizada tiene tres
modos de operación: a velocidad subsíncrona, a velocidad síncrona y a velocidad
supersíncrona. Cada modo de operación exige un flujo diferente de energía a través del
convertidor.
2.2.2.1 Modo de operación subsíncrono
Durante la operación subsíncrona la máquina requiere de tomar energía a través de los
devanados de rotor como se muestra en la Figura 1.6b.
El convertidor opera como se muestra en la Figura 2.2, el MSC proporciona la corriente
trifásica necesaria para la generación eléctrica tomando energía del capacitor del enlace de
CD, el GSC rectifica el voltaje trifásico generado en el estator para mantener constante el
voltaje en el enlace de CD.
Figura 2.2 Flujo de energía en el generador durante la operación a velocidad subsíncrona.

Sistema de generación eoloeléctrica
CENIDET 22
2.2.2.2 Modo de operación síncrono
La velocidad síncrona depende de la frecuencia del voltaje a generar en el estator y del
número de polos con que se construye la máquina de inducción.
En este modo de operación de forma ideal no existe flujo de energía a través del
convertidor como se muestra en la Figura 2.3. Sin embargo en la realidad debe considerarse
la presencia de elementos parásitos que generan pérdidas que disipan energía haciendo
necesario que el MSC continué entregando energía al circuito de rotor.
Figura 2.3 Flujo de energía en el generador durante la operación a velocidad síncrona.
El MSC genera voltaje continuo en los devanados de rotor mientras que el GSC opera
en la región límite entre rectificación e inversión para mantener el nivel de voltaje en el
enlace de CD.
2.2.2.3 Modo de operación supersíncrono
Durante la operación supersíncrona la máquina es capaz de generar energía por ambos
devanados, el estator y el rotor, como se muestra en la Figura 1.6d.
El convertidor opera como se muestra en la Figura 2.4, el MSC rectifica el voltaje que
se genera por el circuito de rotor entregando la corriente hacia el enlace y forzando así al
GSC a operar como inversor extrayendo la energía del enlace hacia el circuito de estator.

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 23
Figura 2.4 Flujo de energía en el generador durante la operación a velocidad supersíncrona.
2.2.3 Modelado
El modelo que se presenta a continuación esta basado en el trabajo desarrollado en [27].
Al aplicar Ley de Voltaje de Kirchhoff (LVK) a cada una de las fases de la Figura 2.1,
es posible obtener:
Para el MSC: ( ) 1( ) 0
PD QD RQ o ar br crv v v v v v v+ + + − + + = (2.6)
Para el GSC: ( ) 2( ) 0
pD qD rQ o ag bg cgv v v v v v v+ + + − + + = (2.7)
Donde: var, vbr, vcr, vPD, vQD, vRQ y vo1 representan los voltajes de cada fase en el rotor,
vag, vbg, vcg, vpD, vqD, vrQ y vo2 representan los voltajes en el GSC.
Puesto que se produce un conjunto balanceado, debe cumplirse que:
, ,
0kx
k a b c
v=
=∑ (2.8)
0ar br cr
v v v+ + = MSC→ (2.9)
0ag bg cg
v v v+ + = GSC→ (2.10)
Al combinar 2.6, 2,7 y 2.8 se obtiene:

Sistema de generación eoloeléctrica
CENIDET 24
oy jD
j
1v V
3= − ∑ (2.11)
( )1
, ,
1 1
3 3o jD PD QD RD
j P Q R
v v v v v=
= − = − + +∑ MSC→ (2.12)
( )
, ,
1 1
3 3o2 jD pD qD rD
j p q r
v v v v v=
= − = − + +∑ GSC→ (2.13)
Además los voltajes a la salida de cada convertidor dependen de las señales o pulsos de
compuerta (g) y del voltaje en el capacitor del enlace de CD, de tal forma que:
Para el MSC →PD r1 o QD r2 o RD r3 o
v =g V , v =g V , v =g V (2.14)
Para el GSC →pD g1 o qD g2 o rD g3 o
V =g V , V =g V , V =g V (2.15)
En donde Vo es el voltaje en el enlace de CD, gr1, gr2 y gr3 son las señales de compuerta
en el MSC y gg1, gg2 y gg3 son las señales de compuerta en el GSC.
Utilizando 2.6, 2.7 y 2.11 con las expresiones anteriores, es posible obtener los voltajes
de fase a neutro de cada convertidor, y representándolos en forma matricial se tiene:
Para el MSC:
1
2
3
2 1 11
1 2 13
1 1 2
ar r
br r o
cr r
v g
v g V
v g
− −
= − − − −
(2.16)
Para el GSC:
1
2
3
2 1 11
1 2 13
1 1 2
ag g
bg g o
cg g
v g
v g V
v g
− −
= − − − −
(2.17)
Por otro lado al aplicar la Ley de Corriente de Kirchhoff (LCK) al nodo superior del
enlace de CD en la Figura 2.1, se tiene que:
1 2
0c o o
I I I+ + = (2.18)
Con: 1 1 2 3o r ar r br r crI g i g i g i= + + (2.19)

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 25
2 1 2 3o g ag g bg g cg
I g i g i g i= + + (2.20)
Donde: Ic es la corriente en el enlace de CD, Io1 es la corriente que sale del enlace de
CD hacia el MSC, Io2 es la corriente que sale del enlace hacia el GSC, iar,br,cr son las
corrientes en el rotor, iag,bg,cg son las corrientes del GSC.
Así el comportamiento del voltaje del capacitor estará dado por la siguiente expresión:
( )o
o1 o2
o
dV 1=- I I
dt C+ (2.21)
Donde Co es el capacitor del enlace de CD.
Si las señales de compuerta son obtenidas mediante un esquema PWM sinusoidal,
entonces la componente fundamental de cada voltaje de fase tendrá una amplitud dada por:
Amplitud
2=
o
ar ,br ,cr ,ag ,bg ,cg
V(V ) m (2.22)
Donde: m es el índice de modulación.
2.3 Emulador de carga
En un sistema aislado, es necesario considerar aquellas condiciones de operación en las
que se colecta del viento una cantidad de potencia diferente a la demandada por la carga. La
mejor solución sería aquella con la que se puede enfrentar tanto en el caso en el que la
potencia colectada es mayor, como aquel en el que ésta resulta menor. Existen diversas
opciones que pueden implicar el uso de uno o dos subsistemas adicionales. En la primera
alternativa, el subsistema adicional debe ser capaz de manejar la potencia en exceso durante
periodos de viento fuerte y/o baja demanda o cuando deba proporcionar la potencia faltante
en intervalos de viento débil y/o carga elevada.
Si se considera un sistema autónomo compuesto por un aerogenerador, entre las
alternativas que requieren un subsistema adicional se tienen las siguientes:

Sistema de generación eoloeléctrica
CENIDET 26
a. Para sistemas pequeños puede ser suficiente el uso de un banco de baterías que se
cargue durante los periodos de energía en exceso, para usarlo en periodos de bajo
viento y/o carga elevada. Otra alternativa de este tipo podría ser el almacenamiento
en un sistema motor-volante de inercia, que durante periodos con exceso de
potencia se alimente al motor para hacer girar el volante de inercia para que, durante
periodos de potencia insuficiente, el volante de inercia mueva a la máquina de
inducción [15].
b. Para sistemas de mayor tamaño es posible usar almacenamiento por bombeo de
agua hacia un nivel superior, para ser liberada cuesta abajo en los periodos de
mayor demanda o menor viento. Sin embargo, se requiere un generador auxiliar
[19].
c. La última opción es utilizar una carga principal y una carga auxiliar, la cual esta
formada por un rectificador que, a través de un convertidor CD/CD, alimenta un
banco de resistores, como se muestra en la Figura 2.5. Esto restringe las condiciones
de operación que pueden ser reproducidas experimentalmente, a aquellas en las que
la potencia colectada del viento iguala o supera a la demandada por la carga [19].
De las alternativas mencionadas se eligió la tercera opción para su implementación en
el banco de pruebas de generación eoloeléctrica. De acuerdo con ésto, el presente trabajo
podría considerarse como dirigido a un sistema diseñado “a la medida” o, desde la
perspectiva de un sistema autónomo con un aerogenerador, podría decirse que está dirigido
únicamente al subsistema eoloeléctrico.
Figura 2.5 Propuesta de solución para el emulador de carga.

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 27
2.4 Control vectorial
El concepto de control vectorial se basa en que una máquina de inducción obtenga un
funcionamiento similar al de un motor de CD con excitación separada. De esta manera se
tendría una componente de corriente para regular el campo magnético y otra para controlar
en forma independiente el par producido [28], [29].
El principio del control vectorial consiste en la utilización de un marco de referencia
especial, para presentar el modelo de la máquina eléctrica considerada durante el diseño de
los controladores que se requieren. El objetivo es que el diseño de dichos controladores
resulte más sencillo que el que tendría que realizarse al usar el modelo trifásico de la
máquina, en el que algunas inductancias varían periódicamente porque dependen de la
posición del rotor. El diseño en el marco de referencia especial es más sencillo debido a
que, cuando se aplica la transformación de coordenadas al modelo trifásico, se obtiene un
modelo dinámico de dos fases (componentes) con desacoplamiento magnético en las
variables sustitutas dq y en el que se elimina la dependencia de la posición del rotor en la
matriz de inductancias resultantes.
Figura 2.6 Diagrama a bloques del control vectorial clásico aplicado a una máquina de inducción.
El marco de referencia normalmente usado es el síncrono, ya que en éste las
componentes dq son constantes cuando las señales trifásicas son sinusoidales puras.

Sistema de generación eoloeléctrica
CENIDET 28
Además, este marco de referencia puede estar alineado u orientado con cualquier vector
espacial que gire a velocidad síncrona. Teóricamente podría ser cualquiera de los vectores
existentes en la máquina, ya sea de voltaje, de enlaces de flujo o incluso de corrientes.
En el control vectorial clásico de la DFIM los controladores proporcional-integral (PI)
tienen una configuración en cascada, como se muestra en la Figura 2.6 En el nivel interno
se tienen los controladores de corriente (uno por cada componente). En el nivel externo el
controlador de velocidad (o de par o de potencia activa) que produce la referencia para un
controlador de corriente y, además el controlador de potencia reactiva (o de voltaje
estatórico, en aplicaciones aisladas) que produce la referencia para el controlador de
corriente restante. Algunas ocasiones pueden requerirse operaciones de desacoplamiento.
2.4.1 Orientado al vector de flujo del estator
La DFIM funciona como generador (DFIG), el estator se encuentra conectado a una
carga aislada, en este caso al emulador de carga propuesto, como se muestra en la Figura
1.9 del Capítulo 1. El DFIG debe entregar voltaje y frecuencia constante a velocidad
variable en las terminales del estator y debe generar potencia por estator y rotor
dependiendo de la velocidad a la que se encuentre trabajando.
dr ,qridr ,qr
v*
dr ,qri
j
p
s TK
s
+ r r
1
L R
σ +
Figura 2.7 Diagrama de bloques utilizado en el diseño de los controladores de corriente del MSC.
Para controlar el DFIG se utiliza el MSC, dicho control utiliza técnicas de control
vectorial clásico orientado a lo largo de la posición del vector de flujo del estator. El control
requiere las mediciones de corrientes de rotor y estator, voltaje de estator y la posición del
rotor. Los controladores constan de dos etapas en cascada, en el nivel interno se tienen los
controladores de corriente (uno por cada componente), diseñados usando el diagrama a
bloques de la Figura 2.7, mientras que en el nivel externo se encuentra el controlador de

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 29
voltaje generado en el estator, diseñado con el diagrama a bloques de la Figura 2.8 [13],
[19], [23].
m
1
T s 1
+
*
sv *
msi
dri
s
ds
s
1v
R
+ σ
msi
( )*
e
2
2 f Mπ
i
p
s TK
s
+
1
n
Figura 2.8 Diagrama de bloques utilizado en el diseño del controlador de voltaje generado en el
estator.
Para determinar las ecuaciones que rigen la técnica de control debe considerarse el
modelo de la máquina de inducción trifásica en el marco de referencia arbitrario [30], que
se presenta en el Anexo A, para esto es necesario transformar las variables trifásicas
medidas (abc) hacia el marco de referencia arbitrario (dq), esto se hace en dos pasos,
primero se aplica la transformación de Clarke y después el vector obtenido (αβ) se
transforma desde el marco de referencia estacionario hacia el arbitrario. Estas ecuaciones se
presentan a continuación.
qs
qs s qs ds
dv R i
dt
λωλ= + + (2.23)
ds
ds s ds qs
dv R i
dt
λωλ= + + (2.24)
( )
qr
qr r qr r dr
dv R i
dt
λω ω λ= + − + (2.25)
( ) dr
dr r dr r qr
dv R i
dt
λω ω λ= − − + (2.26)
qs s qs qrL i M iλ = + (2.27)
ds s ds dr
L i M iλ = + (2.28) qr r qr qsL i M iλ = + (2.29)
dr r dr ds
L i M iλ = + (2.30)
Donde: vs es el voltaje del estator, is es la corriente del estator, λs es el vector de flujo
del estator, Rs es la resistencia del devanado estatórico, Ls es la inductancia del estator, vr es
el voltaje en el rotor, ir, es la corriente en el rotor λr es el vector de flujo en el rotor, Rr es la

Sistema de generación eoloeléctrica
CENIDET 30
resistencia del devanado rotórico, Lr es la inductancia del rotor, ω es la velocidad del marco
de referencia utilizado, y M es la inductancia mutua bifásica y equivale a: 3 2m
M L= .
Cada una de las variables esta representada en coordenadas dq.
Dado que se está considerando un enfoque orientado al flujo del estator, es necesario
conocer la posición del vector λs con respecto al marco de referencia estacionario. Para
lograrlo, se utilizan los voltajes y corrientes medidas en el estator y las expresiones
presentadas en 2.23 y 2.24 con ω=0, para obtener:
o ( ) o ( ) o ( )( )
s s s s s sv Ri dt
α β α β α βλ = −∫ (2.31)
De esta manera, la posición de λs, y del marco de referencia síncrono, estará dado por:
1tan
s
e
s
β
α
λθ
λ
−
=
(2.32)
Donde θe es la posición del vector de flujo del estator.
Al utilizar 2.32 y la transformación de coordenadas al marco de referencia arbitrario,
puede probarse que:
0= = =ds s s qsyλ λ λ λ (2.33)
Lo que indica que el marco de referencia gira sincrónicamente, de tal forma que el eje d
coincide siempre con el vector λs.
La expresión 2.32 debe sustituirse en el modelo de la DFIM en el marco de referencia
arbitrario, expresiones 2.23-2.30, para obtener el modelo de la máquina en el marco de
referencia orientado al flujo del estator. En particular de 2.27, 2.28 y 2.33, se obtiene:
0qs qs qr
s
Mi =- i
Lλ = →
(2.34)

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 31
= →ds s ms ds ms dr
s
M=Mi i = (i -i )
Lλ λ (2.35)
Donde ims es la corriente de magnetización estatórica.
Al sustituir 2.34 y 2.35 en 2.29 y 2.30, con el fin de escribir los enlaces de flujo
rotóricos en términos de las corrientes del rotor y de magnetización estatórica, y
sustituyendo las expresiones resultantes en las ecuaciones de voltaje rotórico 2.25 y 2.26, se
obtiene:
' ( )
qr
qr r qr r slip m ms r dr
div R i + L L i L i
dtσ ω σ= + + (2.36)
' dr
dr r dr r slip r qr
div R i + L L i
dtσ ω σ= − (2.37)
Donde: ωslip es la velocidad angular de deslizamiento y σ es el factor de dispersión que
equivale a: 21 ( )s r
M L Lσ = −
Con estas expresiones se diseñan los controladores de corriente que utiliza el MSC para
proporcionar al rotor los voltajes necesarios, cumpliendo así el objetivo de control (control
de voltaje y frecuencia). En realidad, y debido al acoplamiento entre las componentes dq de
la corriente rotórica en 2.36 y 2.37, los controladores de corriente son diseñados con:
'
qr
qr r qr r
div R i + L
dtσ= (2.38)
' dr
dr r dr r
div R i + L
dtσ= (2.39)
Mientras que las referencias de voltaje para el MSC se obtienen sumando la salida del
controlador de corriente considerada (v’dr o v’qr), con el tercer término de 2.36 y 2.37, que
se toma como una señal de compensación para obtener un desacoplamiento en las
componentes dq. La Figura 2.9 muestra un esquemático para el controlador de la máquina.
* ' ( )qr qr slip m ms r drv v L i L iω σ= + + (2.40)
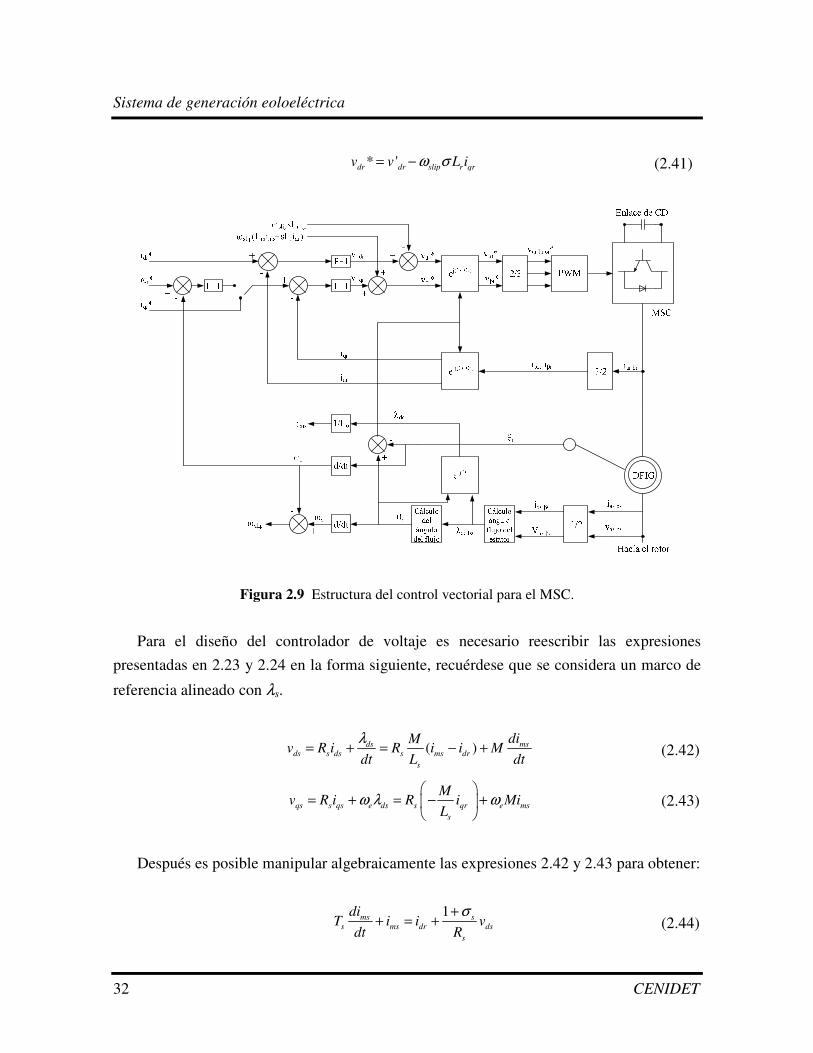
Sistema de generación eoloeléctrica
CENIDET 32
* 'dr dr slip r qrv v L iω σ= − (2.41)
Figura 2.9 Estructura del control vectorial para el MSC.
Para el diseño del controlador de voltaje es necesario reescribir las expresiones
presentadas en 2.23 y 2.24 en la forma siguiente, recuérdese que se considera un marco de
referencia alineado con λs.
( )ds ms
ds s ds s ms dr
s
diMv R i R i i M
dt L dt
λ= + = − + (2.42)
qs s qs e ds s qr e ms
s
Mv R i R i Mi
Lω λ ω
= + = − +
(2.43)
Después es posible manipular algebraicamente las expresiones 2.42 y 2.43 para obtener:
1++ = +
ms s
s ms dr ds
s
diT i i v
dt R
σ (2.44)

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 33
1+= +
s
e s ms qs qr
s
T i V iR
σω (2.45)
Donde Ts equivale a: s s r
T L L=
Si se supone que la caída de voltaje en la resistencia del estator es despreciable, en 2.23
y 2.24 se cumplirá que:
ds ms
ds s ds
div R i M
dt dt
λω= + ≈ (2.46)
qs s qs e ds e msv R i Miω λ ω= + ≈ (2.47)
Con lo anterior, se tiene que es posible controlar el voltaje estatórico en forma indirecta,
a través del control de ims (o λds), para ello se utiliza la expresión 2.44. El último término en
2.44 puede considerarse como una señal de compensación. El valor de referencia de ims se
determina con 2.47 a partir del voltaje y la frecuencia deseados.
Por otro lado, i’qr puede considerarse un grado de libertad, y se utiliza para forzar la
orientación del marco de referencia, con este fin se utiliza 2.34 para determinar el valor
deseado de i’qr (iqr*).
* = −
s
qr qs
Li i
M (2.48)
La frecuencia constante en el estator se obtiene aplicando al rotor corrientes cuya
frecuencia cumpla con la expresión de deslizamiento. Esto se logra al utilizar los ángulos
θslip y θe, expresión 2.49.
* * *2
= − = − = − = −∫slip e r e m slip e r e r
p y dtω ω ω ω ω θ θ θ ω θ (2.49)
Donde: ωe=2πf, es la frecuencia angular deseada, que obliga al vector de flujo estatórico
a rotar con una frecuencia igual a la demandada y θr es la posición del vector de flujo del
rotor.

Sistema de generación eoloeléctrica
CENIDET 34
2.4.2 Orientado al vector de voltaje del estator
El objetivo del GSC es mantener el voltaje del enlace de CD (Vo) constante cuando la
potencia en el DFIG esta fluyendo hacia el rotor (operación subsíncrona) y cuando la
potencia fluye fuera del rotor (operación supersíncrona). La estrategia de control utilizada
es el control vectorial clásico enfocado con un marco de referencia orientado a lo largo de
la posición del vector de voltaje del estator, permitiendo así un control independiente de la
potencia activa y reactiva que fluye entre la carga y el GSC. La estrategia de control consta
de dos etapas; en el nivel interno se tienen los controladores de corriente, Figura 2.10,
mientras que en el externo se tiene el controlador del voltaje del enlace de CD, Figura 2.11
[31].
i
p
s TK
s
+ 2 2
1
L s R
+ dg,qg
idg,qg
v*
dg,qgi
Figura 2.10 Diagrama de bloques utilizado en el diseño de los controladores de corriente del GSC.
o
1
sC
*
oV
dgi
msii
p
s TK
s
+
3m
4
o1I
o2I
Figura 2.11 Diagrama de bloques utilizado en el diseño del controlador de voltaje en el enlace de
CD.
El convertidor back-to-back es regulado en corriente por lo que con la corriente del eje
d (id) se regula el voltaje del enlace de CD y con la componente de corriente del eje q se
regula la potencia reactiva. En la Figura 2.12 se muestra el esquemático del GSC, con el
cual se deducen las ecuaciones necesarias para lograr los objetivos del control [13], [19],
[23].

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 35
Figura 2.12 Convertidor del lado de la red.
De la figura anterior podemos encontrar el voltaje a través de los inductores, el cual
puede representarse en forma matricial como se muestra en la expresión 2.50.
1
1
1
a a a a
b b b b
c c c c
v i i vd
v R i L i vdt
v i i v
= + +
(2.50)
Donde: va, vb y vc son los voltajes por fase del GSC, va1, vb1 y vc1 son los voltajes en las
terminales del convertidor GSC. ia, ib e ic son las corrientes de entrada al GSC, R es la
resistencia de salida del GSC y L es la inductancia de salida del GSC.
Usando la transformación de coordenadas y aplicándola a la expresión anterior, se
obtiene:
1
d
d d e q d
div Ri L Li v
dtω= + − + (2.51)
1
q
q q e d q
div Ri L Li v
dtω= + + + (2.52)
El flujo de potencia activa y reactiva que presenta el GSC es:
3( )d d q q
P v i v i= + (2.53)
3( )d q q d
Q v i v i= + (2.54)

Sistema de generación eoloeléctrica
CENIDET 36
Necesitamos conocer la posición angular del voltaje del estator ya que el control esta
orientado al vector del voltaje de estator, por lo que se calcula con:
1tane e
vdt
v
β
α
θ ω−
= =∫ (2.55)
Alineando el eje d del marco de referencia a lo largo de la posición del voltaje del
estator (dado en 2.55), vq es cero y puesto que la amplitud del voltaje del estator es
constante, vd resulta ser también constante. Aplicando las consideraciones anteriores a las
expresiones presentadas en 2.53 y 2.54, las ecuaciones de potencia sólo consideran el
primer término de ambas ecuaciones. De estas ecuaciones podemos mencionar que la
potencia activa es proporcional a la corriente id y la potencia reactiva a iq, y de esta forma
pueden ser controladas.
Para obtener las ecuaciones para controlar el voltaje en el enlace de CD debemos
despreciar las pérdidas presentadas en la máquina y en el convertidor y así obtener:
2 1
o
o o o
dVC I I
dt= − (2.56)
De la ecuación anterior podemos observar que el voltaje en el enlace de CD puede ser
controlado mediante el control de la corriente id.
Observando las consideraciones antes mencionadas se deduce que el esquema de
control de corriente utiliza lazos de control para id y para iq, la corriente id demandada (id*)
se deriva del error que presenta el lazo de control del voltaje de enlace de CD a través de un
controlador PI estándar. La corriente iq demandada (iq*) determina el factor de
desplazamiento en los inductores del GSC. La estrategia de control utilizada se muestra en
la Figura 2.13.
Los dos últimos términos de las ecuaciones presentadas en 2.51 y 2.52 son
compensaciones que se utilizan para obtener los valores deseados o de referencia para los
lazos de control de voltaje (vd1* y vq1*) los cuales se presentan en las ecuaciones 2.58 y
2.59, los términos en paréntesis constituyen términos de compensación de voltaje.

Capítulo 2. Sistema de conversión eoloeléctrica
Dana Luz González Ojeda 37
Figura 2.13 Estructura del control vectorial para el GSC.
1* ' ( )
d d e q dv v Li vω= − + + (2.57)
1 1* ' ( )
q q e dv v Liω= − − (2.58)
Para obtener los lazos de control únicamente se tiene que manipular apropiadamente las
ecuaciones 2.51 y 2.52. Tomando los dos primeros términos de las ecuaciones y aplicando
transformada de Laplace se obtiene.
( )( ) 1( )
' ( ) ' ( )
qd
d q
i si sF s
v s v s Ls R= = =
+ (2.59)

Sistema de generación eoloeléctrica
CENIDET 38
CAPÍTULO 3
39
Diseño e implementación del prototipo
Este capítulo inicia con una breve descripción de los elementos que conforman el banco
de pruebas desarrollado en [20] para posteriormente presentar las etapas que complementan
el banco de pruebas. Además, se describe el diseño y la implementación práctica de cada
una de las etapas.
3.1 Descripción del banco de pruebas
El sistema de generación eoloeléctrica implementado en CENIDET consta de una
máquina de inducción doblemente alimentada funcionando como generador. El DFIG se
utiliza en este tipo de aplicaciones ya que puede generar voltaje y frecuencia constante a
velocidad variable. Se usa un motor de CD de excitación separada para impulsar al DFIG
para emular el comportamiento de una turbina eólica ya que no se tiene una real en el
laboratorio de CENIDET. Se considera que el acoplamiento entre las dos máquinas se
realiza a través de un eje rígido con una caja de engranes ideal.
En la Figura 3.1 se muestra el banco de máquinas eléctricas de DE LORENZO [35], el
cual forma parte del sistema de generación eoloeléctrica. El sistema mostrado consta de
diferentes módulos necesarios para la implementación, entre los cuales se tienen: la

Sistema de generación eoloeléctrica
CENIDET 40
máquina de inducción doblemente alimentada la cual se conecta al convertidor back-to-
back, el motor de CD de excitación separada que se utiliza para emular la turbina eólica y
diferentes módulos de alimentación y medición. A continuación se presentan las
características de estos módulos.
Figura 3.1 Banco de máquinas eléctricas de DE LORENZO.
a. Máquina de inducción doblemente alimentada. La DFIM tiene la matrícula
DL10280, su potencia nominal es de ½HP ≈ 372W para un voltaje nominal trifásico
de Vf-f=42Vrms, la conexión de los bobinados de rotor y de estator es en estrella (Y),
con una relación de vueltas 1:1.
b. Motor de CD. Identificado con la matrícula DL10200, el motor tiene un voltaje
nominal de 42V y una potencia de 200W, para su funcionamiento se alimenta por
separado el circuito de armadura y de campo con los módulos DL10017 y DL10306
respectivamente. Variando el voltaje en la armadura se logran hacer los cambios de
velocidad de operación del sistema.
c. Módulo de alimentación automatizado. El módulo DL10017 consta de 3 fuentes de
alimentación: una trifásica variable (de 0 a 26V/14A y de 0 a 46V/10A), una fuente
variable de corriente directa (de 0 a 32V/14A y 46V/14A) y otra fuente de CD fija

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 41
(42V/5A). Este módulo sirve para alimentar al motor de CD y a la DFIM cuando se
realizan pruebas sólo con el MSC.
d. Módulo de medición de velocidad. El sensor colocado en el rotor de la DFIM sirve
para la medición de la velocidad de operación del sistema, el módulo DL10050 es
un transductor compuesto por un instrumento de medición digital, la capacidad de
medición es de 0 a 6000rpm. Además, el módulo consta de 2 pines de salida que
entregan 1V por cada 1000rpm.
e. Módulo de medición de potencia, voltaje y corriente eléctrica. El módulo DL10060
consta de una sección de medidas: La sección de medidas de CA esta compuesta de
3 instrumentos (1 amperímetro, 1 voltímetro y 1 watmetro), mientras que la sección
de medidas de CD esta compuesto por 2 instrumentos (1 amperímetro y 1
watmetro).
Los parámetros de la DFIM se muestran en la Tabla 3.1, esta caracterización se realizó
en [20], los parámetros extraídos de esta caracterización son; las resistencias de los
devanados estatórico y rotórico Rs y Rr y las inductancias de dispersión y magnetizante Ls,
Lr y Lm.
Tabla 3.1 Parámetros de la DFIM.
Rs Rr Ls Lr Lm
0.343Ω 0.312Ω 1.198mH 1.198mH 38.62mH
La DFIM tiene 2 polos y la frecuencia deseada es de 60Hz con esto se obtiene el valor
de la velocidad síncrona a la que opera la DFIM. La variación en la velocidad de operación
se limita a un 11.12% de la velocidad síncrona. En la Tabla 3.2 se muestran los rangos de
operación para la máquina.
Tabla 3.2 Rangos de operación de la DFIM.
Velocidad
subsíncrona
Velocidad
síncrona
Velocidad
supersíncrona
3200 rpm 3600 rpm 4000 rpm

Sistema de generación eoloeléctrica
CENIDET 42
3.2 Estructura del sistema
La Figura 3.2 muestra un diagrama general del sistema eoloeléctrico, el cual incluye las
etapas pertenecientes al banco de pruebas desarrollado en [20] y las etapas a las que este
trabajo está dedicado.
Figura 3.2 Sistema de generación eoloeléctrica implementado experimentalmente.
El sistema incluye la máquina de inducción doblemente alimentada, el motor de CD, el
convertidor back-to-back, la carga principal y auxiliar, dispositivos destinados a realizar el
control para cada una de las etapas del sistema y módulos de alimentación y medición
necesarios.
El motor de CD es el que sirve para impulsar a la DFIM, el circuito de armadura y de
campo se alimentan por separado. El rotor de la DFIM se conecta al MSC y el estator al
GSC, los convertidores se encuentran conectados mediante un enlace de CD capacitivo. La
carga se conecta al estator de la máquina y está dividida en dos, carga principal y carga
auxiliar, la carga principal se implementa con el módulo de resistencia trifásica DL10045 y
la carga auxiliar es el emulador de carga descrito en el Capítulo 2, la carga para el
convertidor CD/CD del emulador es parte del banco de DE LORENZO con matrícula

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 43
DL10283. Los programas de control para el convertidor y el emulador se encuentran
implementados en 3 dispositivos dsPIC.
3.3 Diseño
El diseño se realiza una vez definidas las etapas que complementan el banco de
pruebas, el cual incluye valores máximos y mínimos de voltaje, corriente o potencia
necesarios para la elección de los dispositivos. Éstos sirven para la implementación práctica
de la etapa de potencia y de control del convertidor back-to-back y del emulador de carga.
3.3.1 Convertidor back-to-back
Para llevar a cabo el diseño del convertidor se necesitan conocer los rangos de
operación de la máquina utilizada en el banco de pruebas, como son: potencia, voltaje y
velocidad. Estos valores son obtenidos a partir de la caracterización de la DFIM realizada
en [20]. Las pruebas realizadas son: prueba de carga, prueba de corriente continua, prueba
sin carga, prueba a rotor bloqueado y prueba en un punto de operación nominal, los
parámetros obtenidos con esta prueba se encuentran en la Tabla 3.1.
Una vista general de los dispositivos elegidos y con los cuales se construyen las
diferentes etapas del convertidor se muestra en la Figura 3.3.
Figura 3.3 Módulos para la construcción del convertidor back-to-back.

Sistema de generación eoloeléctrica
CENIDET 44
Las especificaciones del convertidor conectado a la DFIM para generar 42Vrms se
resumen en la Tabla 3.3.
Tabla 3.3 Especificaciones del convertidor back-to-back para el banco de pruebas.
Parámetro Descripción Mín. Máx.
Vo [V] Voltaje en el enlace de CD 50 120
ipico [A] Corriente pico de carga - 10
fnom [kHz] Frecuencia nominal de conmutación 10 20
vs máx. [V] Esfuerzo máximo de voltaje en un interruptor - Vo máx. + 2%
is máx. [A] Esfuerzo máximo de corriente en un interruptor - ±15
Los dispositivos de potencia elegidos forman parte de un sistema de potencia integrado
(CiPoS), que consta de un módulo trifásico de seis IGBT con matrícula IKP15N60 de
Infineon Technologies, con tecnología trenchstop, cuyos rangos de operación permiten su
utilización con máquinas de inducción doblemente alimentadas (DFIM) de mayor tamaño
para futuros trabajos.
Para la técnica de control vectorial y la modulación por ancho de pulso se utiliza un
controlador digital de señal con matrícula dsPIC30F3010 de Microchip, este dispositivo
contiene librerías adecuadas para el control de motores de inducción y además, contiene
librerías para la generación del patrón PWM. El dispositivo elegido para acoplar las señales
PWM que salen del dsPIC con las compuertas de cada uno de los IGBT es el PC923 de
Sharp, el cual es un impulsor que tiene un optoacoplador integrado como medio de
protección, esto para desacoplar las señales de control del sistema de potencia.
3.3.2 Emulador de carga
Para el diseño del emulador de carga se considera el diagrama mostrado en la Figura
3.4, en donde se tiene una carga principal y una carga auxiliar, la carga auxiliar se emula
con un convertidor CD/CD alimentando una carga de tipo resistivo, para generar el ciclo de
trabajo del interruptor se debe sensar el voltaje en el estator de la máquina, para poder

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 45
determinar cuando exista una cantidad de potencia diferente a la demandada por la carga
principal, en este caso es cuando el emulador de carga entra en funcionamiento.
Carga principal
De Lorenzo
DL10045
Puente
rectificador
Powerex
ME400803
Interruptor
MOSFET
IRFB4710
Carga
De Lorenzo
DL10283
Impulsor
Sharp
PC923
Controlador
Microchip
dsPIC30F3010
Figura 3.4 Módulos para la construcción del emulador de carga.
El motor de CD que impulsa a la DFIM es pequeño, por lo que no se puede considerar
el caso en el que la potencia generada por la DFIM sea mayor a la potencia consumida por
la carga principal. Por esta razón, se realiza una división de potencia como una forma de
probar el correcto funcionamiento del emulador de carga. Primero se hace una prueba del
sistema completo utilizando sólo la carga principal, posteriormente para probar la carga
auxiliar se considera que la carga principal consume sólo el 80% de la potencia generada,
dejando que la carga auxiliar consuma el 20% restante.
La carga principal es de tipo resistivo, para el cálculo de los valores de las resistencias
se consideran los parámetros de la DFIM, potencia nominal de aproximadamente 372W y
voltaje nominal de Vf-f=42Vrms. El valor asignado a la carga principal es de RL=11Ω.
Para la construcción de la carga auxiliar se tomaron también los parámetros de la
máquina. La carga del convertidor CD/CD sólo debe consumir un 20% de la potencia total
generada por el sistema. El puente rectificador elegido es el ME400803 de Powerex
Semiconductors, cuyos rangos de operación permiten su utilización con máquinas más
grandes. El interruptor elegido según los parámetros de la DFIM es el IRFB4710 de
International Rectifier, el cual soporta el doble de la potencia que debe consumir.

Sistema de generación eoloeléctrica
CENIDET 46
Cabe mencionar que para realizar el diseño de las etapas no se considera un análisis de
pérdidas.
Para tener un análisis de pérdidas, se puede tomar el caso en el que se extraiga el máximo
de potencia del motor de corriente continua, aún con una eficiencia alta del convertidor, la
potencia de la máquina de corriente continua no es suficiente para aumentar la carga y
despreciar las pérdidas por fricción y conducción en la DFIM.
3.4 Implementación etapa de potencia
En este punto se presenta la a implementación de la etapa de potencia del convertidor
back-to-back y del convertidor CD/CD el cual forma parte del emulador de carga. El
convertidor incluye los dos convertidores inversor/rectificador puente completo y el enlace
de CD.
3.4.1 Convertidor del lado de la máquina
El circuito completo para el MSC se muestra en la Figura 3.5, el cual incluye los
impulsores utilizados en la implementación y cada uno de los componentes necesarios. Se
debe tener en cuenta que las entradas a este convertidor son las fases a, b y c del rotor,
cuando se este trabajando a velocidad supersíncrona; y cuando este en velocidad
subsíncrona las fases a, b y c del rotor son las salidas.
Los dispositivos de potencia utilizados forman parte de un sistema de potencia
integrado (CiPoS), que consta de un módulo trifásico formado de dispositivos IGBT con
matrícula IKP15N60 de Infineon Technologies, con tecnología trenchstop, cuyos rangos de
operación son: voltaje de Vce=600V, Ic=30A a 25°C, frecuencia máxima fnom=20KHz,
capacitancia de entrada Ciss=860pF.
El dispositivo elegido para generar las señales de compuerta fue el circuito integrado
PC923 de Sharp, el cual es un impulsor para dispositivos IGBT con un optoacoplador de
alta velocidad incluido, entre sus aplicaciones se encuentra el control de inversores.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 47
Para reducir los problemas de interferencia en las señales de compuerta de los IGBT se
diseñó una misma placa para los impulsores y para el módulo trifásico, la Figura 3.5
muestra el esquemático que se siguió para la realización de la placa del MSC.
PC923
R1
+15V
RgC1
2
3
8
5
6
7
PC923
R1
+15V
Rg
2
3
8
5
6
7
R2
a cb
Qr1 Qr2 Qr3
Qr4 Qr5 Qr6
(+)
(-)
Enlace de DC
C
O
N
T
R
O
L
R2
C1
Figura 3.5 Esquemático para el MSC.
Los valores de resistencia y capacitancia para el integrado PC923 se obtuvieron como
lo indica la hoja de datos, resultando en valores de: R1=330Ω, que sirve para limitar la
corriente de entrada, R2=180Ω, Rg=10Ω y C1=0.01µf. Otra especificación de las placas son
las fuentes de alimentación, se utilizan fuentes de alimentación separadas para cada uno de
los impulsores superiores (Qr1, Qr2 y Qr3), mientras que para los impulsores inferiores se
utiliza una sola fuente (Qr4, Qr5 y Qr6).
La Figura 3.6 muestra el esquemático del módulo CiPoS de IGBTs con su apropiada
conexión.
Figura 3.6 Esquemático para el módulo CiPoS.

Sistema de generación eoloeléctrica
CENIDET 48
3.4.2 Convertidor del lado de la red
El circuito completo para el GSC se muestra en la Figura 3.7, el cual incluye los
impulsores utilizados y cada uno de los componentes necesarios para su implementación.
Las especificaciones para esta placa son iguales a las presentadas en la implementación del
MSC, sólo que en este convertidor la entrada ahora será el enlace de CD cuando esté
trabajando a velocidad supersíncrona y la salida cuando este trabajando a velocidad
subsíncrona.
Figura 3.7 Esquemático para el GSC.
En la Figura 3.8 se presenta una imagen de la placa implementada para el convertidor,
esta placa es la misma para el MSC y para el GSC, ya que ambos tienen la misma
configuración, sólo debe distinguirse que las entradas y salidas son diferentes para cada
uno.
Figura 3.8 Implementación de la placa para los convertidores.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 49
3.4.3 Enlace de CD
Para la construcción del enlace de CD se deben tomar en cuenta las especificaciones de
voltaje, corriente y potencia del sistema, donde la más importante es el valor de voltaje al
cual se va a regular el enlace. El voltaje mínimo es de Vo=50 V y el máximo de Vo=120 V.
Se elige una capacitancia de 1000µf, la especificación para elegir este valor es, escoger
un valor grande para así eliminar el rizo de la corriente, este mismo enfoque es utilizado en
[13], [18], [23]. No se realiza un análisis formal de este valor porque el objetivo de esta
tesis no trata el estudio de cómo obtener un valor óptimo para el capacitor de enlace. El
esquemático para el enlace de CD se presenta en la Figura 3.9.
Figura 3.9 Esquemático para el enlace de CD.
Se utiliza un arreglo de capacitores, ya que para el valor elegido de capacitancia sólo
existen capacitores electrolíticos y estos no presentan buenas características, por lo que se
utilizan tres capacitores electrolíticos de aluminio en paralelo, esto para formar el valor
deseado y se agrega un capacitor de mejor calidad de tipo MKP, este arreglo se realiza para
disminuir la resistencia serie que presentan los capacitores electrolíticos, esto se hace con la
ayuda del capacitor del tipo MKP ya que su resistencia es mucho menor a la presentada en
los capacitores electrolíticos. Los valores para los capacitores utilizados son: C1=47µf
(electrolítico) y C2=0.22µf (MKP).
En la Figura 3.10 se muestra una imagen completa del convertidor back-to-back, la cual
incluye: el MSC (i.), el GSC (l.), el enlace de CD (j.) y las fuentes de alimentación para
cada uno de los impulsores (h. y k.).

Sistema de generación eoloeléctrica
CENIDET 50
Figura 3.10 Implementación del convertidor back-to-back.
3.4.4 Convertidor CD/CD
En un sistema aislado, es necesario considerar aquellas condiciones de operación en las
que se colecta del viento una cantidad de potencia diferente a la demandada por la carga.
Por esta razón se elige introducir una carga auxiliar al sistema.
El emulador de carga propuesto esta constituido por una carga principal de tipo
resistivo y una carga auxiliar que emula la existencia de una resistencia variable. Esta carga
se representa por un rectificador que alimenta una carga de tipo resistivo por medio de un
convertidor CD/CD, esto se muestra en la Figura 3.11.
La carga principal es de tipo resistivo, se calcula para que consuma el 80% de la
potencia total del sistema. El valor asignado a la carga principal es: RL=11Ω, no es
necesaria su implementación debido a que dentro del banco de máquinas de DE LORENZO
se encuentra un módulo de resistencia trifásica.
La carga resistiva que se va a utilizar tiene una capacidad de disipar 3x100W, una
resistencia variable de 0 a 68Ω y esta conectada en Y, dicho módulo es el DL10045.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 51
Figura 3.11 Esquemático del emulador de carga.
Para la construcción de la carga auxiliar se tomaron los valores obtenidos en la
simulación. En la Figura 3.12 se muestra el esquemático de la carga auxiliar. La carga
auxiliar sólo debe consumir un 20% de la potencia total que genera el sistema, por lo que se
calculó con los siguientes valores: un voltaje de entrada de VL=35V y una corriente de
Iaux=0.8A, con esto se calculó la potencia que debía ser capaz de disipar y fue de
Paux=48.49W. Para la carga del convertidor se utiliza el módulo DL10283 del banco de
máquina eléctricas de DE LORENZO, capas de disipar 3x90W y con una resistencia
variable de 0 a 60Ω, la resistencia que debe tener como carga el convertidor CD/CD es de
Raux=44Ω.
Figura 3.12 Esquemático de la carga auxiliar.
La elección de los dispositivos se hizo con respecto a la disponibilidad, por lo que para
el puente rectificador trifásico se utilizó el dispositivo con matrícula ME400805, con un

Sistema de generación eoloeléctrica
CENIDET 52
voltaje Vmax=800V y una corriente de Imax=30A, el fabricante es Powerex Semiconductors.
El MOSFET utilizado es el IRFB4710 de International Rectifier, que soporta un voltaje
VDSS=100V, una corriente ID=75A a 25°C y tiene una resistencia de encendido de
RDS=14mΩ.
El capacitor que se utilizó es un capacitor electrolítico y tiene un valor de Caux=1000µf.
En la Figura 3.13 se muestra una imagen de la placa que se implementó para la carga
auxiliar.
Figura 3.13 Implementación del emulador de carga.
3.5 Implementación etapa de control
El convertidor back-to-back necesita controlarse utilizando técnicas de control vectorial
clásico, cada uno de los inversores/rectificadores tiene un objetivo de control diferente, el
MSC controla al DFIG y el GSC controla el voltaje en el enlace de CD. El emulador de
carga contiene un convertidor CD/CD, al cual se le debe controlar el ciclo de trabajo para
que consuma la potencia excedente que se genera.
Esta sección se divide en tres puntos, en la primera se explica que tipo de dsPIC se
utiliza para la implementación de los programas de control, en la segunda se presentan los
diagramas de flujo para el control en lazo cerrado utilizados en simulación y en lazo abierto
utilizados en el prototipo experimental, por último, se presenta la implementación de estas
etapas.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 53
3.5.1 Selección del microcontrolador
Un Controlador Digital de Señal (Digital Signal Controller: DSC) es un potente
microcontrolador (MCU) de 16 bits al que se le han añadido las principales capacidades de
los DSP. Es decir, los DSC poseen todos los recursos de los mejores microcontroladores de
16 bits conjuntamente con las principales características de los DSP, permitiendo su
aplicación en el extraordinario campo del procesamiento de las señales analógicas y
digitales.
La serie dsPIC30F ocupa una situación muy cercana a los DSP y a los
microcontroladores de 32 bits, es decir, no alcanza pero se acerca bastante a los niveles de
rendimiento y prestaciones de los grandes microcontroladores y de los DSP.
Existen tres familias de la serie dsPIC30F que se caracterizan por su utilización final,
las cuales son:
1. Familia de dispositivos de propósito general.
2. Familia de dispositivos para control de motores y sistemas de alimentación.
3. Familia de dispositivos para control de sensores.
De acuerdo a la amplia diversidad de modelos de la serie dsPIC30F en el mercado, la
búsqueda se reduce a la familia de dispositivos para control de motores y sistemas de
alimentación.
Esta familia de DSC reúne siete modelos diseñados para soportar aplicaciones de
control de motores, tales como motores de corriente continua y de inducción. También son
adecuados para sistemas de alimentación ininterrumpibles, inversores, fuentes de
alimentación conmutadas, para corrección del factor de potencia y para el control de la
energía en equipos industriales y de alimentación [33].
Los dsPIC30F son idóneos para la regulación de la velocidad, la posición y la dirección
de giro de los motores, así como el control de la anchura de pulsos tanto en el campo de
control de motores de corriente continua como de corriente alterna.

Sistema de generación eoloeléctrica
CENIDET 54
En las Tablas 3.4 y 3.5 se presentan las características principales de los diferentes
dsPICs de la familia 30F adecuados para el control de motores de inducción alterna. Entre
las características significativas de los dsPIC30F para este campo de aplicaciones se citan el
módulo PWM, los temporizadores programables y el convertidor A/D de 10 bits y
500Ksps. También existen dispositivos más grandes de 40, 64 y 80 pines.
Tabla 3.4 Modelos de dispositivos dsPIC30F para el control de motores.
Memoria de
programa flash Dispositivo Pines
Bytes Instrucciones
SRAM EEPROM
Entradas
modo
captura
Salidas
modo
comparador
dsPIC30F2010 28 12KB 4KB 512B 1024B 4 2
dsPIC30F3010 28 24KB 8KB 1024B 1024B 4 2
dsPIC30F4012 28 48KB 16KB 2048B 1024B 4 2
Tabla 3.5 Modelos de dispositivos dsPIC30F para el control de motores.
Dispositivo Control
de motores
A/D 10-Bit
500Ksps
Codificación
de cuadratura
UART
UART SPI I2C CAN
Líneas
E/S
dsPIC30F2010 6 canales 6 canales Si 1 1 1 - 20
dsPIC30F3010 6 canales 6 canales Si 1 1 1 - 20
dsPIC30F4012 6 canales 6 canales Si 1 1 1 1 20
De acuerdo a las características que presenta cada uno de estos dispositivos, se opta por
trabajar con el modelo dsPIC30F3010, este DSC se encuentra en un nivel intermedio de
características y es óptimo para esta aplicación. No se eligió el dsPIC30F4012 ya que para
esta aplicación no se necesita toda la memoria que contiene este dsPIC, también, pudo
elegirse el dsPIC30F2010 pero por la disponibilidad y costo se selecciona el
dsPIC30F3010.
3.5.2 Programación
Una vez seleccionado el dsPIC, deben definirse los pasos para la realización del
programa para el control en lazo cerrado y en lazo abierto de los convertidores. En el inciso

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 55
A se presentan los diagramas de flujo para el control del convertidor back-to-back y del
emulador de carga, estos diagramas son utilizados en simulación. En el inciso B se
presentan los diagramas utilizados durante la implementación experimental.
A. Lazo Cerrado
El convertidor back-to-back se controla mediante técnicas de control vectorial clásico,
dependiendo de lo que se quiera lograr se debe alinear el marco de referencia con algún
vector de la máquina.
a. Convertidor del lado de la máquina
El MSC sirve para controlar el voltaje y la frecuencia en el DFIG, utilizando técnicas de
control vectorial clásico. Los controladores se diseñan bajo un esquema de control
orientado al vector del flujo del estator, el cual consta de dos etapas en cascada, en el nivel
interno se tienen los controladores de corriente y en el nivel externo el controlador de
voltaje en el estator.
El control para el MSC lo realiza el dsPIC mediante los diagramas de flujo que se muestran
en las Figuras 3.14 y 3.15.
Figura 3.14 Diagrama de flujo para el control del MSC.

Sistema de generación eoloeléctrica
CENIDET 56
En la Figura 3.14 se especifican los parámetros necesarios para la aplicación de la
técnica de control. El diagrama de flujo inicia con la lectura y captura de los datos
necesarios para realizar el control vectorial clásico, una vez aplicada la ley de control
(control vectorial orientado al vector de flujo del estator) se envía el vector de referencia
para la generación del patrón PWM, la modulación de ancho de pulso la realiza el dsPIC
internamente, lo único que se realiza es un código para programar algunos registros.
En la Figura 3.15 se muestran cada uno de los pasos a seguir para la aplicación de la ley
de control, iniciando con la transformación de coordenadas de cada una de las variables
involucradas, esto se realiza en dos pasos, primero de abc hacia αβ y posteriormente a dq,
el siguiente paso es aplicar la ley de control, desarrollada en el Capítulo 2, y por último se
realiza nuevamente transformación de coordenadas pero ahora inversa.
Figura 3.15 Diagrama de flujo para el control vectorial del MSC.
b. Convertidor del lado de la red
El objetivo del control para el GSC es mantener constante el voltaje en el bus de CD, la
estrategia de control usada esta orientada al vector de voltajes del estator. En las Figuras
3.16 y 3.17 se muestran los diagramas de flujo necesarios para aplicar la ley de control
vectorial.
Al igual que en el control para el MSC en la Figura 3.16 se inicia con la captura y
lectura de datos necesarios para controlar al GSC, posteriormente se aplica la ley de
control, explicada en la Figura 3.17, y finalmente los vectores de referencia resultantes de
la ley de control son enviados al modulador de ancho de pulso para obtener el patrón PWM,
el cual se coloca en las compuertas de los interruptores del convertidor.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 57
Figura 3.16 Diagrama de flujo para el control del GSC.
En la Figura 3.17 se presentan los pasos a seguir para la aplicación de la ley de control.
El control vectorial inicia con una transformación de coordenadas de abc a dq, esto se hace
ya que es más fácil considerar el modelo de la máquina en dos fases que considerar el
modelo trifásico de la máquina. El siguiente paso es calcular las referencias y
compensaciones necesarias para los controladores de voltaje y de corriente. Una vez
obtenido el vector de referencia el cual contiene la información para controlar el voltaje en
el enlace de CD, se procede nuevamente a la transformación de coordenadas de dq hacia
abc, esto se realiza en dos pasos, primero de dq a αβ y posteriormente de αβ a dq.
Figura 3.17 Diagrama de flujo para el control vectorial del GSC.
c. Convertidor CD/CD
Para generar el ciclo de trabajo del interruptor del convertidor CD/CD, se debe sensar el
voltaje en la carga, el cual se obtiene en el estator de la máquina y por el GSC,

Sistema de generación eoloeléctrica
CENIDET 58
posteriormente debe compararse este voltaje con un voltaje de referencia, el voltaje de
referencia es determinado según los valores máximos generados por el DFIG, 60Hz y 42V.
En la Figura 3.18 se muestra el diagrama a bloques para el control del convertidor.
Figura 3.18 Diagrama de flujo para el control de la carga auxiliar.
B. Lazo Abierto
Para el prototipo experimental se considera sólo un control en lazo abierto, el cual
proporciona un control simple a velocidad variable para la máquina de inducción, dentro
del programa se tiene un control de frecuencia y amplitud de la señal de salida, la
modulación PWM que se aplica es la modulación sinusoidal por ancho de pulso.
La señal de referencia para obtener el patrón PWM se introduce generando una onda
sinusoidal, la forma más fácil de generarla es usando una tabla que contiene cada uno de los
puntos que la describan, esto se realiza mediante el programa dsPICworks, en el cual se le
asigna el valor de frecuencia y amplitud necesarios para cumplir los objetivos de control.
La señal que se introduce tiene una frecuencia de 60Hz y una amplitud de 42V, esto se
selecciona de esta forma ya que son los valores máximos que la máquina puede generar en
el estator.
La señal portadora (onda triangular) es programada por medio de los registros que
contiene el módulo PWM del dsPIC, aquí se debe introducir la frecuencia de conmutación
y el tiempo muerto entre las señales PWM que se generan.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 59
El control de la velocidad y frecuencia se realiza aplicando el perfil llamado volts-hertz
(perfil VF), en el cual, si se realiza un ajuste en la frecuencia debe también ajustarse en una
cantidad proporcional el voltaje de salida. Esta relación entre voltaje y frecuencia en una
DFIM que trabaja a velocidad variable se le llama perfil VF [36].
La variación del perfil VF se realiza por medio de dos potenciómetros conectados en los
pines destinados al convertidor analógico/digital, al variar estos potenciómetros el
programa presenta una interrupción para leer estos valores que afectan a los datos
introducidos en la tabla sinusoidal, y así, la salida sea afectada conforma a los nuevos datos
de frecuencia y voltaje que se le envía. Cuando se varía la frecuencia hay que variar de
manera proporcional el potenciómetro que controla a la amplitud de la señal. En la Figura
3.19 se muestra un diagrama de flujo para el programa en lazo abierto del convertidor.
El diagrama de flujo presentado en la Figura 3.19 es el mismo para el control del MSC,
del GSC y del emulador de carga, únicamente lo que cambia en cada programa son los
datos que contiene la onda sinusoidal que se introduce al dsPIC. Los códigos para el
convertidor y el emulador se presentan en el Anexo B.
Figura 3.19 Diagrama de flujo para el control del convertidor.

Sistema de generación eoloeléctrica
CENIDET 60
3.5.3 Implementación
Para la implementación de los circuitos de control para el convertidor back-to-back se
utiliza un controlador digital de señal y aplicando el diagrama de flujo mostrado en la
Figura 3.19 el circuito completo para la etapa de control se muestra en la Figura 3.20, las
salidas del modulador PWM son las entradas a las compuertas de cada uno de los
convertidores inversor/rectificador.
El microcontrolador utilizado es el dsPIC30F3010 de Microchip, la frecuencia de
conmutación utilizada es fpwm=16KHz con tiempos de muertos de Tcy=2µs. Los valores de
resistencia y capacitancia para el circuito son: R1=470Ω, R2=33KΩ, R3=R4=10KΩ,
C1=10nf, y C2=C3=33pf. Las salidas PWM se encuentran entre los pines 21 a 26.
Figura 3.20 Esquemático para la placa de control.
El esquemático mostrado en la Figura 3.20 sirve para la implementación del control
para el MSC y para el GSC. Para el control del ciclo de trabajo del interruptor del
convertidor CD/CD se utiliza el mismo esquemático, únicamente tomando como salida el
pin 26. En la Figura 3.21 se presenta una imagen de la placa implementada para el control.

Capítulo 3. Diseño e implementación del prototipo
Dana Luz González Ojeda 61
Figura 3.21 Implementación de la placa de control.
El potenciómetro R3 sirve para variar la frecuencia de la señal sinusoidal introducida en
el programa, esta señal es de 60Hz y con el potenciómetro únicamente se varía para tener
una frecuencia menor. El potenciómetro R4 sirve para variar la amplitud de la señal
sinusoidal.
Al variar cualquiera de estos potenciómetros se obtiene un cambio en el perfil VF, el
cual ocasiona un cambio en la señal de salida que sirve para generar el patrón PWM. Se
puede decir que se tiene un control en la frecuencia y la amplitud del sistema.

Sistema de generación eoloeléctrica
CENIDET 62
CAPÍTULO 4
63
Simulaciones y resultados experimentales
El sistema de generación eoloeléctrica colecta la energía del viento por medio de la
turbina eólica, en este trabajo, esta acción la realiza un motor de CD. Para ello, el motor
produce un movimiento giratorio que transfiere la potencia colectada hacia el generador. El
generador transforma la energía mecánica que recibe en energía eléctrica para alimentar la
carga (carga principal y carga auxiliar). La operación del sistema se controla mediante el
convertidor back-to-back.
En este capítulo se presentan los resultados de simulación y experimentales. En
simulación se presentan diferentes tipos de pruebas, como variaciones en algunos
parámetros, estas pruebas sirven para validar los lazos de control en lazo cerrado del
sistema. En la parte experimental se muestran pruebas para diferentes puntos de operación,
el parámetro que se varía es la velocidad de operación a la que trabaja el generador.
4.1 Resultados de simulación
En esta sección se presentan los resultados de simulación del sistema de generación
eoloeléctrica, desarrollado en el programa Matlab. Para modelar cada una de las etapas que
conforman el sistema se utilizan las ecuaciones que se presentan en el Capítulo 2.

Sistema de generación eoloeléctrica
CENIDET 64
El programa para la simulación del sistema WEC incluye el DFIG, el convertidor back-
to-back y el emulador de carga. Además, se considera que un motor de CD con excitación
separada, controlado en velocidad, impulsa el DFIG. Las simulaciones consideran una
carga principal de tipo RL trifásica conectada en estrella (Y) a las terminales del estator,
mientras que la carga auxiliar es un convertidor CD/CD que alimenta una carga de tipo
resistivo.
Las etapas del sistema se implementan con el paquete Simulink de Matlab, el modelo
del DFIG, del motor de CD y del control para el MSC se desarrollan con funciones S, las
funciones S se utilizan para generar programas en lenguaje C, lo que permite aumentar la
velocidad para modelar en Simulink de Matlab. El convertidor, el emulador de carga y el
control para el GSC se implementan en el ambiente Simulink. Las librerías de simulación y
los programas en funciones S se presentan en el Anexo C.
En la Tabla 4.1 se muestran los parámetros que se utilizan en la simulación para el
DFIG, se considera uno de 50hp y 460Vrms.
Tabla 4.1 Parámetros del DFIG para simulación.
Rs Rr Ls=Lr Lm J B P
0.087Ω 0.228Ω 0.8mH 34.7mH 1.662kg⋅m2 0.1N⋅m⋅s 4
Para el motor de CD se considera uno de 200hp, en la Tabla 4.2 se presentan los
parámetros del motor.
Tabla 4.2 Parámetros del motor de CD para simulación.
rf ra Lf La Laf Jm Bm
12Ω 0.012Ω 9H 35mH 0.18H 30kg⋅m2 0.01N⋅m⋅s
El voltaje del enlace de CD se regula a 700V. Se considera que el acoplamiento entre
las dos máquinas se realiza mediante un eje rígido con una caja de engranes ideal y tiene

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 65
una relación de N1/N2=ωDFIG/ωmotorCD=4. Los valores para la carga tipo RL son: RL=10Ω y
LL=15mH.
Los rangos de operación en la velocidad del sistema se presentan en la Tabla 4.3. La
variación en la velocidad se limita a un ±11.1% de la velocidad síncrona.
Tabla 4.3 Velocidad de operación de la DFIM para simulación.
Velocidad
subsíncrona
Velocidad
síncrona
Velocidad
supersíncrona
1600 rpm 1800 rpm 2000 rpm
Los controladores que se utilizan en el control del MSC y del GSC son de tipo
proporcional-integral (PI). Se utiliza el método del lugar de las raíces para diseñarlos. En la
Tabla 4.4 se presentan los controladores de voltaje y corriente para el MSC y en la Tabla
4.5 los controladores para el GSC.
Tabla 4.4 Controladores para el MSC.
Tipo de controlador Controlador
Voltaje scv
18.35G (s) 3.67
s= +
Corriente sci
134.2G (s) 0.671
s= +
Tabla 4.5 Controladores para el GSC.
Tipo de controlador Controlador
Voltaje ocv
207.2G (s) 2.59
s= +
Corriente oci
2.835G (s) 0.189
s= +

Sistema de generación eoloeléctrica
CENIDET 66
Las simulaciones del sistema de generación eoloeléctrico se implementan en lazo
cerrado. El resultado permite verificar la adecuada implementación de los modelos: de la
DFIM operando como generador, del convertidor back-to-back y de los controladores del
MSC y del GSC.
Se han definido una serie de pruebas para validar y evaluar la operación del sistema en
simulación. Las pruebas se dividen en:
• Variación en la velocidad de referencia del sistema.
• Variación en la frecuencia.
• Variación en el voltaje del enlace de CD.
4.1.1 Variación en la velocidad de operación
Cada convertidor que conforma el convertidor back-to-back tiene un objetivo de
control, el MSC debe mantener el voltaje y frecuencia constante en el estator y el GSC debe
mantener constante el voltaje en el enlace de CD, esto debe lograrse aun cuando se
presenten variaciones en la velocidad de operación del sistema. A continuación se
presentan pruebas estáticas y dinámicas.
A. Pruebas estáticas
Las pruebas estáticas se realizan para evaluar el comportamiento de los controladores
del MSC y del GSC a diferentes velocidades de operación. Las pruebas estáticas consisten
en simular el sistema WEC en tres modos de operación: a velocidad subsíncrona, a
velocidad síncrona y a velocidad supersíncrona.
En estas pruebas se muestran los voltajes y corrientes en el rotor, estator y en el GSC.
Además, se muestran las potencias activa y reactiva en la carga y en el rotor.
En la Figura 4.1 se presenta una gráfica en donde se pueden apreciar los tres modos de
operación.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 67
Figura 4.1 Velocidad de operación.
a. Prueba velocidad subsíncrona
Las formas de onda que se obtienen durante la simulación del sistema de generación
eoloeléctrica a velocidad subsíncrona (-11.1% de la velocidad síncrona) se presentan en las
Figuras 4.2 y 4.3. En este modo de operación el GSC trabaja como inversor y el MSC como
rectificador.
Figura 4.2 Voltaje y corriente en el rotor, estator y en el GSC a velocidad subsíncrona.

Sistema de generación eoloeléctrica
CENIDET 68
En la Figura 4.2 se presentan los voltajes y corrientes en el rotor, en el estator y en el
GSC respectivamente. Para el voltaje del estator se ha solicitado un voltaje pico de 311.13V
(para que el voltaje rms sea de 220V) y una frecuencia de 60Hz. Esta figura demuestra que
tanto el control del MSC como el control del GSC se mantienen operando adecuadamente.
De acuerdo con la Figura 4.3 las potencias activa y reactiva en la carga mantienen un
valor medio constante, los valores son: PL=11KW y QL=6KVA. Las potencias en el rotor
indican que el generador consume potencia, ya que el signo de la potencia es positivo.
Figura 4.3 Potencias activa y reactiva en la carga y en el rotor a velocidad subsíncrona.
b. Prueba a velocidad síncrona
Las Figuras 4.4 y 4.5 muestran las curvas obtenidas durante la simulación del sistema
de generación operando a velocidad síncrona.
En la Figura 4.4 se muestra en la parte superior el voltaje y corriente en el rotor, en la
cual se puede observar que la corriente de excitación al rotor se mantiene constante como
era de esperarse.
En la parte intermedia de la Figura 4.4 se muestra el voltaje y corriente en el estator, el
cual cumple con los valores de amplitud y frecuencia solicitados. Por último, se muestra el

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 69
voltaje y corriente en el GSC. En este modo de operación el GSC opera en la región límite
entre rectificación e inversión.
Figura 4.4 Voltaje y corriente en el rotor, estator y en el GSC a velocidad síncrona.
Figura 4.5 Potencias activa y reactiva en la carga y en el rotor a velocidad síncrona.
Las potencias activa y reactiva permanecen constantes durante la operación a velocidad
síncrona como se muestra en la parte superior de la Figura 4.5, en cambio las potencias en

Sistema de generación eoloeléctrica
CENIDET 70
el rotor disminuyen, esto sucede ya que de forma ideal no debe existir flujo de energía a
través del convertidor, por lo que el MSC no da corriente al rotor, sin embargo, existen
pérdidas debidas a los elemento parásitos, por lo que el MSC sigue entregando energía al
circuito rotórico pero en una cantidad menor.
c. Prueba a velocidad supersíncrona
Las Figuras 4.6 y 4.7 muestran los resultados de la simulación del sistema operando a
velocidad supersíncrona (+11.1% de la velocidad síncrona). En este modo de operación el
MSC trabaja como rectificador y el GSC como inversor.
Figura 4.6 Voltaje y corriente en el rotor, estator y en el GSC a velocidad supersíncrona.
En la Figura 4.6 se puede observar que el voltaje en el estator permanece constante. La
corriente en el GSC es menor en este modo que en el modo a velocidad subsíncrona. Los
resultados confirman la capacidad del control para continuar su regulación.
Las potencias activa y reactiva en la carga permanecen constantes, como se muestra en
la Figura 4.7. Las potencias en el rotor indican que el DFIG genera potencia, ya que el
signo de la potencia es negativo.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 71
Figura 4.7 Potencias activa y reactiva en la carga y en el rotor a velocidad supersíncrona.
B. Pruebas dinámicas
Las pruebas dinámicas se realizan para verificar el funcionamiento del sistema ante
cambios en la velocidad de operación. Estas pruebas se realizan haciendo cambios en la
velocidad del sistema para poder evaluar la capacidad del control vectorial, cuyos objetivo
para el MSC es mantener el voltaje del estator constante en amplitud y frecuencia y para el
GSC mantener constante el voltaje en el enlace de CD. Las pruebas realizadas son:
incremento y decremento en la velocidad a la que trabaja el sistema y una prueba de
recuperación de energía, en la cual se realiza un incremento y un decremento de la
velocidad de operación.
a. Transición de velocidad subsíncrona a supersíncrona
Las Figuras 4.8 a 4.10 muestran el resultado obtenido durante la simulación del sistema
ante un cambio de velocidad. Se realiza un incremento en escalón de la velocidad de
referencia, iniciando en velocidad subsíncrona hasta llegar a velocidad supersíncrona.
En la Figura 4.8 se presenta el incremento en escalón de la velocidad de referencia, este
cambio se hace en el motor de CD, el cual es el encargado de impulsar al DFIG, en esta
figura se puede apreciar el paso de velocidad subsíncrona a supersíncrona en

Sistema de generación eoloeléctrica
CENIDET 72
aproximadamente 1.5s. Esta prueba se realiza con el fin de poder ver los cambios que se
presentan en los voltajes, corrientes y potencias en rotor y estator.
Figura 4.8 Incremento en la velocidad de operación, velocidad subsíncrona a supersíncrona
(1800rpm a 2000rpm).
En la Figura 4.9 se puede observar que el voltaje en el estator permanece constante en
amplitud y frecuencia durante el cambio de velocidad, mientras que la corriente de rotor
reduce su frecuencia conforme se aproxima el generador a su velocidad síncrona y
nuevamente la aumenta cuando la supera. En el punto de cruce por la sincronía la corriente
de rotor invierte la secuencia de las fases.
Figura 4.9 Voltaje y corriente en el rotor, estator y en el GSC de subsíncrona a supersíncrona.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 73
En la gráfica de voltaje y corriente en el rotor, mostrada en la Figura 4.9, se puede
observar que cuando el sistema trabaja a velocidad subsíncrona se observa que el
desplazamiento de fase entre la corriente y el voltaje es cercano a cero, mientras que
cuando trabaja a velocidad supersíncrona el desplazamiento de fase entre voltaje y corriente
va creciendo y acercándose a 180°.
En la Figura 4.10 se muestran el voltaje en el enlace de CD y las potencias activa y
reactiva tanto en la carga como en el rotor. Analizando las potencias en el rotor se puede
apreciar que el flujo de potencia se invierte, de consumirla a generarla, aproximadamente
en 1.5s que es el cruce de velocidad síncrona. Las potencias en la carga permanecen
constantes. La regulación del enlace de CD permanece constante durante todo el tiempo
que dura la variación de la velocidad.
Figura 4.10 Potencias activa y reactiva en la carga y en el rotor de subsíncrona a supersíncrona.
b. Transición de velocidad supersíncrona a subsíncrona
Las Figuras 4.11 a 4.13 muestran el resultado obtenido durante la simulación del
sistema durante el cambio de modo de operación de supersíncrono hasta subsíncrono. En la
Figura 4.11 se presenta el decremento en escalón de la velocidad de operación.

Sistema de generación eoloeléctrica
CENIDET 74
Figura 4.11 Decremento en la velocidad de operación, velocidad supersíncrona a subsíncrona
(2000rpm a 1800rpm).
En la Figura 4.12 se puede observar que el voltaje en el estator permanece constante en
amplitud y frecuencia durante todo el cambio de velocidad, la corriente de rotor reduce su
frecuencia conforme se aproxima el generador a su velocidad síncrona, al cruzar por la
velocidad síncrona invierte la secuencia de las fases y nuevamente aumenta la frecuencia
cuando supera la velocidad subsíncrona. Al igual que en la prueba anterior el voltaje y la
corriente en el rotor tienen un desplazamiento de fase cercano a los 180° cuando trabaja en
velocidad supersíncrona y cuando trabaja a velocidad subsíncrona casi no existe un
desplazamiento de fase.
Figura 4.12 Voltaje y corriente en el rotor, estator y en el GSC de supersíncrona a subsíncrona.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 75
En la Figura 4.13 se presenta el voltaje en el enlace de CD y las potencias activa y
reactiva en la carga y en el rotor. Las potencias en la carga permanecen constantes durante
todo el cambio de velocidad. En las potencias del rotor se puede apreciar una inversión en
el flujo de potencia, de generarla a consumirla. El voltaje en el enlace de CD permanece
constante.
Figura 4.13 Potencias activa y reactiva en la carga y en el rotor de supersíncrona a subsíncrona.
c. Prueba de recuperación de energía
Las pruebas de recuperación de energía se realizan para evaluar la dirección de la
energía a través del convertidor back-to-back, En la Figura 4.14 se presenta esta prueba.
La prueba de recuperación de energía permite observar la potencia que entrega el MSC
hacia el circuito rotórico del DFIG, la inversión en el signo de la potencia indica que se
tiene un flujo de energía de la máquina hacia el convertidor. Además, se puede observar
que la inversión en el flujo de potencia no es justo en el cambio de modo de operación de
subsíncrono a supersíncrono, éste se presente en 1.33s, y la inversión en la potencia sucede
a 1.56s. Esto es debido a la presencia de las resistencias parásitas de los devanados de rotor
Rr incluidos en el modelo de la DFIM y cuya disipación de energía debe ser superada antes
de obtener una recuperación de energía efectiva hacia el MSC.

Sistema de generación eoloeléctrica
CENIDET 76
Figura 4.14 Recuperación de energía.
4.1.2 Variación en la frecuencia de operación
El sistema de generación eoloeléctrica debe mantener constante la amplitud y
frecuencia del voltaje del estator aun cuando exista algún cambio en la frecuencia de
operación del sistema.
Figura 4.15 Decremento en la frecuencia de operación (60Hz a 50Hz).
En las Figuras 4.15 a 4.17 se realiza un cambio en la frecuencia de operación para poder
observar si ante este cambio el control es capaz de controlar la frecuencia del sistema. Este

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 77
cambio se realiza en el control del MSC. La Figura 4.15 presenta la velocidad de operación
y frecuencia del sistema, la prueba se realiza a velocidad subsíncrona, como se observa en
la primer gráfica, en la segunda gráfica se presenta un incremento en escalón de la
frecuencia de operación de 60Hz a 50Hz.
En la Figura 4.16 se presenta el voltaje y corriente en el estator, rotor y en el GSC. El
voltaje en el estator permanece constante, indicando que el MSC cumple su objetivo de
control.
En aproximadamente 1s se realiza el cambio de frecuencia de 60Hz a 50Hz por lo que
el control del MSC envía una señal para que el voltaje y corriente en el rotor mantenga su
frecuencia de 60 Hz aun cuando se presente una variación. En la gráfica para el voltaje del
GSC también se puede notar esta variación.
Figura 4.16 Voltaje y corriente en el estator, rotor y en el GSC de 60Hz a 50Hz.
En la Figura 4.17 se presenta las potencias activa y reactiva en la carga y en el rotor. Se
puede observar aproximadamente en 1s que ambas gráficas presentan una perturbación ya
que aquí se presenta la variación en la frecuencia y posteriormente incrementan su valor.

Sistema de generación eoloeléctrica
CENIDET 78
Figura 4.17 Potencias activa y reactiva en la carga y en el rotor de 60Hz a 50Hz.
4.1.3 Variación del voltaje en el enlace de CD
En las Figuras 4.18 a 4.20 se presentan pruebas ante una variación en el voltaje del
enlace de CD. La Figura 4.18 muestra la velocidad de operación a la que se realiza la
prueba, en este caso a velocidad subsíncrona, además, se presenta la variación del voltaje
del enlace de CD, se realiza un decremento de 800V a 700V.
Figura 4.18 Decremento en el voltaje del enlace de CD (800V a 700V).

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 79
En la Figura 4.19 se presenta el voltaje y corriente en el estator, rotor y en el GSC. Se
puede observar que aun cuando varié el voltaje en el enlace el voltaje en el estator y en el
rotor permanecen constantes en amplitud y frecuencia.
Figura 4.19 Voltaje y corriente en el estator, rotor y en el GSC de 800V a 700V.
Figura 4.20 Potencias activa y reactiva en la carga y en el rotor de 800V a 700V.
En la Figura 4.20 se muestran las potencias activa y reactiva en la carga, las cuales
permanecen constantes cuando el enlace se regula a 800V, aproximadamente en 1s se

Sistema de generación eoloeléctrica
CENIDET 80
realiza la variación en el voltaje del enlace y se puede observa una variación en ambas
potencias, pero posterior a esto permanecen constante nuevamente. En la gráfica donde se
presentan las potencias en el rotor se observa que en aproximadamente 1s se presenta una
variación, después de está permanece constante nuevamente.
4.1.4 Potencia carga principal y auxiliar
El sistema de generación de tipo aislado esta conformado por una carga principal y una
carga auxiliar, en donde la carga auxiliar es un diodo rectificador alimentando un
convertidor CD/CD, la carga es de tipo resistivo, con la utilización de este convertidor se
emula la presencia de una carga variable, que sirve para consumir la potencia excedente de
la carga principal.
Para la simulación sólo se realiza una prueba ya que aunque exista una variación en
algún parámetro del sistema la potencia en la carga no cambia, esto es debido que el control
de ambos convertidores entra en funcionamiento y logra compensarlas.
La potencia total en la carga es de PL=11KW, con la división propuesta en capítulos
anteriores se realiza la simulación con los datos que se presentan en la Tabla 4.6.
Tabla 4.6 Valores para la carga principal y auxiliar en simulación.
RL PL Raux Paux
14Ω 8.8KW 57.6Ω 2.2KW
En la Figura 4.21 se muestra la potencia activa en la carga principal y en la carga
auxiliar. La prueba inicia considerando que la carga principal esta consumiendo el 100% de
la potencia generada en el sistema. En aproximadamente 1s se efectúa una variación en la
carpa principal para que esta sólo consuma una fracción de la potencia.
Con esto se demuestra que la carga principal consume el 80% de la potencia total del
sistema y el restante se consume por la carga auxiliar.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 81
Figura 4.21 Potencia activa en la carga principal y carga auxiliar.
4.2 Resultados experimentales
En esta sección se presentan las pruebas experimentales que se realizan con el banco de
pruebas de conversión eoloeléctrica, en la Figura 4.22 se muestra una imagen del sistema
de generación eoloeléctrico finalizado, el prototipo experimental incluye:
a. Máquina de inducción doblemente alimentada.
b. Motor de CD.
c. Módulo de alimentación automatizado.
d. Módulo de medición de velocidad.
e. Módulo de medición de potencia, voltaje y corriente eléctrica.
f. Convertidor del lado de la red.
g. Convertidor del lado de máquina.
h. Fuente para los impulsores del GSC.
i. Fuente para los impulsores del MSC.
j. Enlace de CD.
k. Emulador de carga.
l. Control.
m. Carga principal.
n. Carga auxiliar.

Sistema de generación eoloeléctrica
CENIDET 82
Figura 4.22 Banco de pruebas de generación eoloeléctrica.
Al igual que en simulación se realizan diferentes pruebas de operación, como son las
estáticas y las dinámicas. Las pruebas estáticas permiten verificar la regulación del voltaje
generado en el estator a diversas condiciones de operación del sistema, en estas pruebas se
tienen 3 modos de operación: a velocidad subsíncrona (3200rpm), a velocidad síncrona
(3600rpm) y a velocidad supersíncrona (4000rpm). Por otro lado las pruebas dinámicas
permiten observar el comportamiento del sistema ante cambios de velocidad, el primero de
velocidad subsíncrona a supersíncrona (3200rpm a 4000rpm) y el segundo de velocidad
supersíncrona a subsíncrona (4000rpm a 3200 rpm). El voltaje en el enlace de CD se regula
a 50V.
Las pruebas se realizan con una carga de tipo resistivo de 10W. La capacidad del motor
de CD que emula a la turbina no permite utilizar una carga mayor. La variación en la
velocidad se limita a un ±11.12% de la velocidad síncrona.
Antes de iniciar las pruebas con el sistema completo se realizan pruebas para verificar
las señales PWM generadas por los dispositivos dsPIC que son los que disparan las
compuertas de los IGBT que conforman cada uno de los convertidores. Las placas de
control tienen dos potenciómetros, con uno se varía la frecuencia del sistema, se puede
tener una variación de 30Hz a 62Hz, y con el otro se establece el radio voltaje-frecuencia el
cual determina la pendiente del perfil volts-hertz. En la Figura 4.23 se muestran las señales
PWM de control del MSC para cada una de las fases, sólo se muestran las señales de los
interruptores superiores.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 83
Figura 4.23 Señales PWM generadas por el dsPIC.
La frecuencia a la que se conmutan los IGBT es de 16KHz, las señales PWM de los
interruptores de una rama deben ser complementarias. Se programa un tiempo muerto de
2µs entre las señales. En la Figura 4.24 se muestran las señales PWM de una rama, en
donde se observan las señales para el interruptor superior y el interruptor inferior. Se hace
un acercamiento para resaltar en tiempo muerto que existen en el encendido y apagado de
las señales.
Figura 4.24 Detalle de tiempos muertos en el PWM.
A continuación se presentan las pruebas realizadas, en cada una se presentan gráficas de
corriente y voltaje en el rotor, voltaje y corriente en el estator y el voltaje en el enlace de

Sistema de generación eoloeléctrica
CENIDET 84
CD, todas contienen la medición de la velocidad de operación a la que esta trabajando el
sistema.
4.2.1 Operación a velocidad subsíncrona
En la Figura 4.25 se muestra el voltaje y la corriente en el rotor, suministrados por el
MSC, mientras que en la Figura 4.26 se muestra el voltaje y corriente generados en el
estator.
Figura 4.25 Voltaje y corriente en el rotor a velocidad subsíncrona.
Figura 4.26 Voltaje y corriente en el estator a velocidad subsíncrona.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 85
La prueba se realiza a 3200rpm, es decir un 11.1% menos de la velocidad síncrona. En
este modo de operación se genera una corriente de menor frecuencia en el circuito de rotor
que en el voltaje del estator según se observa al comparar las Figuras 4.27 y 4.28. El ruido
en el voltaje del estator se ve reducido cuando el sistema está operando muy próximo a su
velocidad síncrona
Esta prueba permite verificar que el voltaje generado en el estator se mantiene en
amplitud y frecuencia constante para la operación subsíncrona.
La Figura 4.27 se muestra el oscilograma obtenido durante la operación del sistema a
velocidad subsíncrona donde se puede apreciar el voltaje en el enlace de CD, el cual se
mantiene regulado aproximadamente en 50V.
Figura 4.27 Voltaje en el enlace de CD a velocidad subsíncrona.
4.2.2 Operación a velocidad síncrona
El modo de operación a velocidad síncrona supone una corriente continua en el circuito
de rotor, lo cual se verifica observando las formas de onda presentadas en la Figura 4.28.
La frecuencia del voltaje generado se mantiene en 60Hz.
En la Figura 4.29 podemos observar que el voltaje y la corriente en el estator
permanecen constantes durante este modo de operación.

Sistema de generación eoloeléctrica
CENIDET 86
Velocidad de rotor (rpm)
Corriente de rotor
Voltaje de rotor
Figura 4.28 Voltaje y corriente en el rotor a velocidad síncrona.
Figura 4.29 Voltaje y corriente en el estator a velocidad síncrona.
Figura 4.30 Voltaje en el enlace de CD a velocidad síncrona.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 87
El voltaje en el enlace de CD permanece constante cuando se realiza esta prueba, como
se muestra en la Figura 4.30, lo que indica que el GSC esta funcionando correctamente.
4.2.3 Operación a velocidad supersíncrona
El modo de operación a velocidad supersíncrona se realiza a una velocidad de 4000rpm,
es decir a una velocidad de 11.1% más de la velocidad síncrona. La Figura 4.31 muestra los
resultados obtenidos para la corriente y el voltaje en el rotor para esta velocidad.
Figura 4.31 Voltaje y corriente en el rotor a velocidad supersíncrona.
Figura 4.32 Voltaje y corriente en el estator a velocidad supersíncrona.
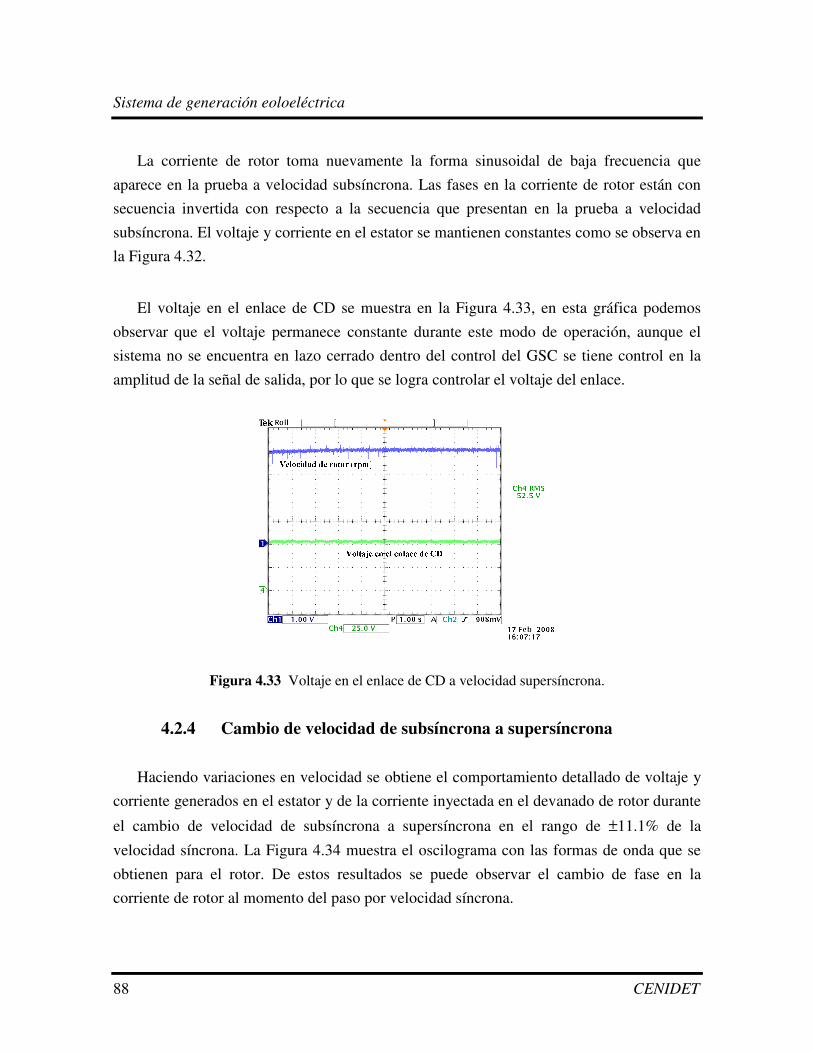
Sistema de generación eoloeléctrica
CENIDET 88
La corriente de rotor toma nuevamente la forma sinusoidal de baja frecuencia que
aparece en la prueba a velocidad subsíncrona. Las fases en la corriente de rotor están con
secuencia invertida con respecto a la secuencia que presentan en la prueba a velocidad
subsíncrona. El voltaje y corriente en el estator se mantienen constantes como se observa en
la Figura 4.32.
El voltaje en el enlace de CD se muestra en la Figura 4.33, en esta gráfica podemos
observar que el voltaje permanece constante durante este modo de operación, aunque el
sistema no se encuentra en lazo cerrado dentro del control del GSC se tiene control en la
amplitud de la señal de salida, por lo que se logra controlar el voltaje del enlace.
Figura 4.33 Voltaje en el enlace de CD a velocidad supersíncrona.
4.2.4 Cambio de velocidad de subsíncrona a supersíncrona
Haciendo variaciones en velocidad se obtiene el comportamiento detallado de voltaje y
corriente generados en el estator y de la corriente inyectada en el devanado de rotor durante
el cambio de velocidad de subsíncrona a supersíncrona en el rango de ±11.1% de la
velocidad síncrona. La Figura 4.34 muestra el oscilograma con las formas de onda que se
obtienen para el rotor. De estos resultados se puede observar el cambio de fase en la
corriente de rotor al momento del paso por velocidad síncrona.

Capítulo 4. Simulaciones y resultados experimentales
Dana Luz González Ojeda 89
Figura 4.34 Voltaje y corriente en el rotor de subsíncrona a supersíncrona.
Durante la prueba el voltaje y la corriente generados en el estator permanecen
constantes en amplitud y frecuencia durante toda la variación en la velocidad de operación
del sistema. El voltaje en el enlace de CD también permanece constante durante toda la
prueba, como se observa en la Figura 4.35.
Figura 4.35 Voltaje en el enlace de CD de subsíncrona a supersíncrona.
4.2.5 Cambio de velocidad de supersíncrona a subsíncrona
El cambio de velocidad de supersíncrona a subsíncrona permite observar el seguimiento
del control ante cambios de velocidad en sentido opuesto. La Figura 4.36 muestra los
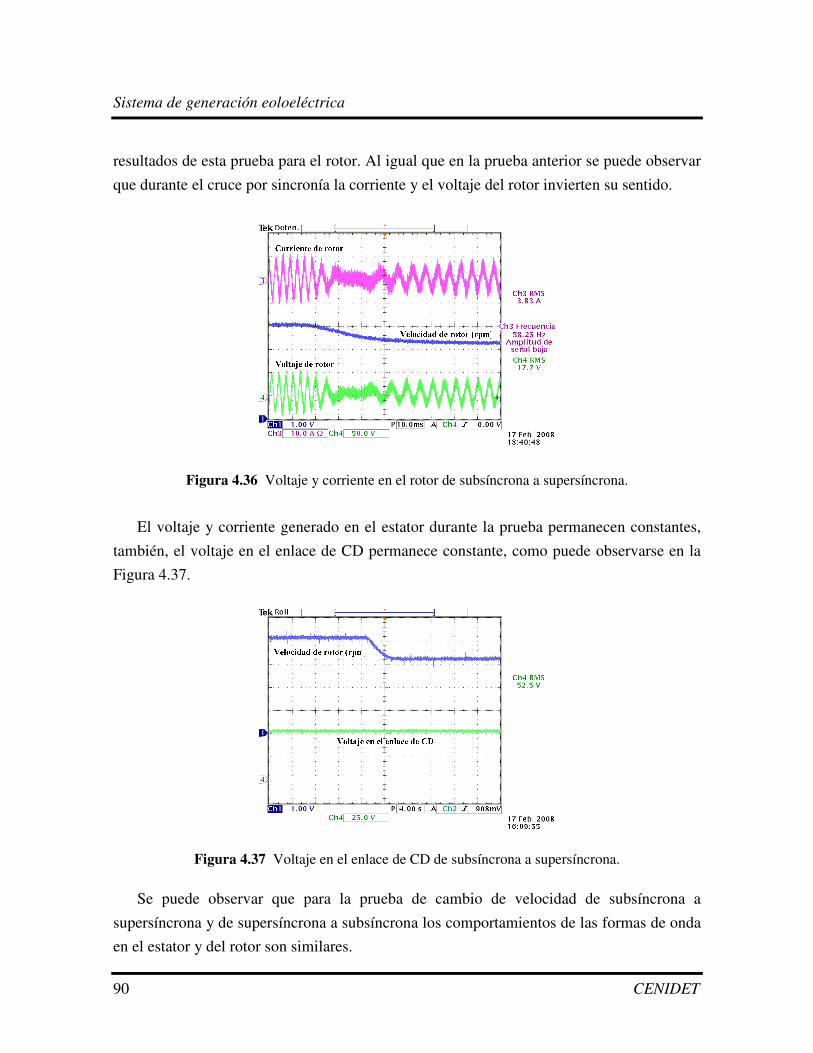
Sistema de generación eoloeléctrica
CENIDET 90
resultados de esta prueba para el rotor. Al igual que en la prueba anterior se puede observar
que durante el cruce por sincronía la corriente y el voltaje del rotor invierten su sentido.
Figura 4.36 Voltaje y corriente en el rotor de subsíncrona a supersíncrona.
El voltaje y corriente generado en el estator durante la prueba permanecen constantes,
también, el voltaje en el enlace de CD permanece constante, como puede observarse en la
Figura 4.37.
Figura 4.37 Voltaje en el enlace de CD de subsíncrona a supersíncrona.
Se puede observar que para la prueba de cambio de velocidad de subsíncrona a
supersíncrona y de supersíncrona a subsíncrona los comportamientos de las formas de onda
en el estator y del rotor son similares.

Capítulo 5
91
Conclusiones y trabajos futuros
Como parte final, en este capítulo se presentan las conclusiones generales y particulares
obtenidas al finalizar el trabajo de tesis, de acuerdo al análisis, desarrollo, diseño,
simulación e implementación del sistema de generación eoloeléctrico de tipo aislado.
Además, se presentan los trabajos futuros que pueden complementar la investigación.
Con el incremento en la demanda de energía eléctrica, han surgido sistemas de
generación que utilizan fuentes alternas de energía, entre las que se tienen: la solar, la
hidráulica, la geotérmica y la eólica.
La energía eólica es de las fuentes renovables de más rápido crecimiento en años
recientes. Los costos de la energía eólica actualmente para plantas a gran escala son
competitivos frente a las plantas que utilizan combustibles fósiles.
En los últimos años se ha hecho frecuente el uso de sistemas de generación
eoloeléctrica basados en la máquina de inducción doblemente alimentada que utiliza en su
circuito rotórico un convertidor back-to-back, el cual permite un flujo de potencia en ambas
direcciones. Esto ocurre debido a que la máquina puede consumir o producir energía en su
circuito rotórico dependiendo de las condiciones de operación.

Sistema de generación eoloeléctrica
CENIDET 92
El trabajo desarrollado en esta tesis esta dedicado a completar el banco de pruebas de
generación eoloeléctrica para poder estudiar diferentes condiciones de operación a las que
se ven sometidos los sistemas eólicos. Entre estas condiciones se tienen diferentes
variaciones en los parámetros que afectan al sistema.
Al utilizar un convertidor bidireccional de potencia como el convertidor back-to-back
se obtiene la posibilidad de trabajar a velocidad sub y supersíncrona en el generador. Este
convertidor presenta mejores características frente a otros como son: menor costo en el
inversor/rectificador ya que sólo maneja una fracción de la potencia total del sistema, se
mejora la eficiencia del sistema. Además, aplicando técnicas de control vectorial orientadas
hacia algún vector de la máquina se puede tener control en las potencias activa y reactiva
entre el DFIG y el GSC.
El capacitor conectado entre el MSC y el GSC ofrece un control separado de ambos
inversores/rectificadores, teniendo así un control independiente para ambos convertidores.
5.1 Conclusiones particulares
Entre los alcances logrados durante el desarrollo, estudio y análisis de este trabajo se
tienen: la simulación del sistema de generación eoloeléctrica y la implementación
experimental de las etapas que complementan el banco de pruebas.
Una vez obtenida la simulación del sistema en lazo cerrado y la implementación del
prototipo experimental en lazo abierto, se obtienen las siguientes conclusiones:
De las simulaciones se tienen las siguientes conclusiones:
• Aún cuando exista alguna variación en un parámetro que afecta las condiciones de
operación del sistema, el control en simulación es capaz de actuar rápidamente y
corregir estas variaciones.
• Es posible controlar el voltaje y la frecuencia en el estator aunque exista algún
parámetro variando, y se puede concluir que el objetivo de control para el MSC se
está logrando.
Capítulo 5. Conclusiones y trabajos futuros
Dana Luz González Ojeda 93
• Y para el GSC se cumple el objetivo de control, al poder mantener constante el
voltaje en el enlace de CD durante las pruebas en simulación.
• Se observa la prueba de recuperación de energía, en donde al trabajar en velocidad
supersíncrona el generador logra entregar energía en lugar de consumirla.
Una vez obtenida la implementación experimental de las etapas y realizadas las pruebas
con el banco de pruebas completo se tienen las siguientes conclusiones:
• Al utilizar dispositivos dsPIC que contienen librerías para crear patrones PWM, se
obtiene mayor rapidez en el envió de la secuencia PWM.
• Se utilizó un módulo inteligente de dispositivos IGBT por lo que el tamaño del
prototipo disminuye al igual que el número de componentes.
• En los oscilogramas obtenidos se puede observar una baja distorsión armónica en
las señales del estator y del rotor.
• El voltaje del enlace de CD permanece constante aún cuando exista una variación en
la velocidad del sistema.
• El MSC logra mantener constante el voltaje generado en el estator en amplitud y
frecuencia.
• Al utilizar una carga auxiliar se puede considerar el caso en donde la potencia
generada por la máquina sea mayor a la potencia en la carga principal.
Como observación general se puede mencionar que tanto en simulación como
experimentalmente se obtiene el funcionamiento esperado: Un generador de inducción que
mantiene la frecuencia y la amplitud constante sin importar que exista un cambio en algún
parámetro, como pueden ser: un cambio en la velocidad de operación, una variación en la
regulación del voltaje en el enlace de CD o una variación en la frecuencia de operación del
sistema.

Sistema de generación eoloeléctrica
CENIDET 94
Al realizar la implementación experimental se tuvieron algunos inconvenientes, los
cuales son:
• En la carga auxiliar no se considera el caso en el que el generador excede la
potencia que consume la carga principal, ya que la DFIM es una máquina de baja
potencia y sólo se tiene una potencia de 10W en la carga.
• La máquina de corriente continua que se utiliza como emulador de turbina eólica
tienen que ser por lo menos del doble de potencia de la DFIM para poder realizar
pruebas a la potencia nominal de la máquina y poder tener una recuperación de
energía.
5.2 Trabajos futuros
De acuerdo con el análisis de los resultados en simulación y experimentalmente se
presentan las perspectivas de trabajos futuros que se pueden seguir para mejor las
características del sistema de generación eoloeléctrica.
Se pueden realizar pruebas con el sistema implementado en este trabajo de tesis, pero
ahora incluyendo el emulador de turbina desarrollado en [9]. Esto para tener perfiles de
viento reales y no sólo el motor de CD de excitación separada.
Para optimizar el sistema se propone realizar la técnica de control vectorial clásico
programada en un dsPIC de mayor capacidad, para así tener un sensado de los parámetros
de la máquina y realizar un control más apropiado.
Investigar e implementar un control apropiado para la carga auxiliar y colocar una
máquina más grande, para considerar el caso en donde la potencia generada sea mayor a la
potencia consumida por la carga principal.
Se propone un estudio de balance de energía en el enlace de CD para reducir el tamaño
del capacitor. Esto para poder tener mejores características en el tipo de capacitor que se
coloca y para que el capacitor electrolítico que se coloca no acorte la vida útil del sistema.

Capítulo 5. Conclusiones y trabajos futuros
Dana Luz González Ojeda 95
Es conveniente agregar protecciones contra sobrecorriente, sobrevoltaje y
sobretemperatura, esto para proteger a los módulos contenidos en el convertidor back-to-
back.
Aún cuando no se presente alta distorsión armónica en las señales del rotor y estator, es
conveniente introducir filtros de entrada-salida del convertidor y el filtro para el emulador
de carga, esto para optimizar el consumo de energía eléctrica.
El convertidor del lado de la red puede funcionar como compensador del factor de
potencia, esta característica resulta útil al mejorar la operación de la máquina de inducción,
por lo que se propone controlar la potencia activa y reactiva del sistema.
Ya que no se tiene una DFIM adecuada para conectar el sistema a la red eléctrica, se
propone diseñar e implementar un emulador de red por medio de una máquina síncrona.
Una vez analizado el sistema eoloeléctrico de forma aislado y con conexión a un
emulador de red, se propone implementar un sistema conectado a la red eléctrica.

Sistema de generación eoloeléctrica
CENIDET 96

Referencias
97
[1] Lyons, J. P.; Vlatkovic, V.: “Power Electronics and Alternative Energy
Generation”, PESC 2004, IEEE 35th Power Electronics Specialist Conference,
Aachen, Alemania, pp. 16-21.
[2] Scheriber, D.: “Power Electronics for Wind Turbines”, Semikron Elektronik
GmbH&Co.KG, Alemania, Febrero 2005.
[3] Kundur, P.: “Power System Stability and Control”, Electric Power Research
Institute, Mc. Graw Hill, 1994.
[4] Müller, S.; Deicke, M.; De Doncker, R. W.: “Doubly Fed Induction Generator
Systems”, IAM 2002, IEEE Industry Applications Magazine, Mayo-Junio 2002,
pp. 26-33.
[5] Carlin, P.W.; Laxson, A. S.; Muljadi, E.B.: “The History and State of the Art of
Variable-Speed Wind Turbine Technology”, National Renewable Energy
Laboratory, Technical Report NREL/TP, , USA, 2001.
[6] European Wind Energy Association: “Wind Power Installed in the Word”,
2006. http://www.ewea.org

Sistema de generación eoloeléctrica
CENIDET 98
[7] Comisión Federal de Electricidad: “Generación de Energía en México”, CFE
México, Junio 2007. http://www.cfe.org.mx
[8] Gómez, R, L.: “Aspectos Relevantes de Energía Eólica”, CONAE México,
Comisión Nacional para el Ahorro de Energía. http://conae.org.mx
[9] Ovando, D. R.: “Emulador de Turbina Eólica para el Banco de Pruebas de
Conversión Eoloeléctrica”, CENIDET 2007, Tesis de maestría.
[10] Gjengedal, T.: “Large Scale Wind Power Farms as Power Plants”, NWPC
2004, Nordic Wind Power Conference, pp. 1-8.
[11] Panda, D.; Benedict, E. L.; Venkataramanan, G.: “A Novel Control Strategy for
the Rotor Side Control of a Doubly-Fed Induction Machine”, IAS 2001, IEEE
Industry Applications Conference, pp. 1695-1702.
[12] Dubois, M. R.: “Review of Electromechanical Conversion in Wind Turbines”,
Technical Report 2000.
[13] Peña, R.; Clare, J.; Asher, G.: “Doubly Fed Induction Generator Using Back-
to-Back PWM Converters and its Application to Variable-Speed Wind-
Energy Generation”, EPA 1996, IEEE Proceedings on Electric Power
Application, vol.143, No. 3, Mayo 1996, pp. 231-241.
[14] Weigand, C. H.; Lauw, H. K.; Marckx, D. A.: “Utility-Scale Variable-Speed
Wind Turbines Using a Doubly-Fed Generator with a Soft-Switching Power
Converter”, AWEA 1996, Conference and Exhibition of the American Wind
Energy Association, pp. 235-240.
[15] Peña, R.; Cardenas, R.; Asher, G.; Clare, J.: “Vector Controlled Induction
Machine for Stand-Alone Wind Energy Applications”, IAS 2000, IEEE
Industry Applications Conference, vol. 3, pp. 1409-1415.

Referencias
Dana Luz González Ojeda 99
[16] Freris, L.: “Wind Energy Conversion System”, Prentice Hall, 1990.
[17] “Electrical Generation Aspects of Wind Turbine Operation”, Proceedings of
the BWEA-D workshop, pp. 11-20, 1087.
[18] Niiranen, J.: “Experiences on Voltage Dip Ride Through Factory Testing of
Synchronous and Doubly Fed Generator Drives”, EPE 2005, European
Conference on Power Electronics and Applications, pp. 1-11.
[19] Peña, R.; Clare, J.; Asher, G.: “A Doubly Fed Induction Generator Using
Back-to-Back PWM Converters Supplying an Isolated Load from a
Variable-Speed Wind Turbine”, EPA 1996, IEEE Proceedings on Electric
Power Application, vol. 143, No. 3, Septiembre 1996, pp. 380-387.
[20] Rodríguez, V. J.: “Diseño e Implementación de un Sistema Aislado de
Generación Eléctrica basado en un Convertidor Reversible back-to-back”,
CENIDET 2005, Tesis de maestría.
[21] Chapman, S. J.: “Máquinas Eléctricas”, Mc. Graw Hill, Colombia, 2002.
[22] Yikang, H.; Jiabing, H.; Rende, Z.: “Modeling and Control of Wind-Turbine
Used DFIG under Network Fault Conditions”, ICEM 2005, International
Conference on Electrical Machines and Systems, vol. 2, pp. 986-991.
[23] Peña, R.; Asher G.; Clare, J.; Cardenas, R.: “A Constant Frequency Voltage
Variable Speed Stand Alone Wound Rotor Induction Generator”, OAIPG
1996, Opportunities and Advances in International Power Generation, pp. 111-
114.
[24] Rabelo, B.; Hofmann, W.: “Optimised Power Flow on Wind Power Plants
with the Doubly-Fed Induction Generator”, EPE 2000, European Conference
on Power Electronics and Applications.

Sistema de generación eoloeléctrica
CENIDET 100
[25] Rabelo, B.; Hofmann, W.: “Optimal Active and Reactive Power Control with
the Doubly-Fed Induction Generator in the MW-Class Wind-Turbines”,
PEDS 2001, IEEE International Conference on Power Electronics and Drive
Systems, vol. 1, Octubre 2001, pp. 53 –58.
[26] Rabelo, B.; Hofmann, W.: “Control of an Optimized Power Flow in Wind
Power Plants with Doubly-Fed Induction Generators”, PESC 2003, IEEE 34th
Annual Conference on Power Electronics Specialist, vol. 4, Junio 2003, pp.1563 –
1568.
[27] Pires, V.; Silva, J.: “Teaching Nonlinear Modeling, Simulation, and Control of
Electronic Power Converters Using MATLAB/SIMULINK”, IEEE
Transactions on Education, Vol. 45, No. 3, Agosto 2002, pp. 253-261.
[28] Leonhard, C. W.: “Control of Electrical Drives”, Springer-Verlag, Berlin,
Alemania, 1985.
[29] Vas, P.: “Vector Control of AC machines”, Clarendon press Oxford, New York,
1994.
[30] Krause, P. C.: "Analysis of Electric Machinery", Mc. Graw Hill, Singapore,
1987.
[31] Boldea, I.: “Electric Drives”, S. A. Nasar, Florida, 2006.
[32] Yu, Z.: “Space-Vector PWM with TMS320C24x/E24x Using Hardware and
Software Determined Switching Patterns”, Aplication Report SPRA524,
Marzo 1999.
[33] Angulo, J. M.: “Microcontroladores avanzados dsPIC, Controladores
Digitales de Señales. Arquitectura, Programación y Aplicaciones”, Thomson,
2006.

Referencias
Dana Luz González Ojeda 101
[34] Angulo, J. M.: “dsPIC Diseño Práctico de Aplicaciones”, Mc. Graw Hill, 2006.
[35] Laboratorio Openlab: “Sistema compuesto de máquinas eléctricas”, Manual de
especificaciones de DE LORENZO. http://www.delorenzo.com.mx
[36] Bowling, S.: “An Introduction to AC Induction Motor Control Using the
dsPIC30f MCU”, Michochip Technology, 2005.

Sistema de generación eoloeléctrica
CENIDET 102

Anexo A
103
Modelado de la DFIM
Un generador de inducción doblemente alimentada es una máquina de rotor devanado
que recibe alimentación tanto por el rotor como por el estator. A continuación se presenta el
modelo trifásico de la DFIM en coordenadas abc y el modelo en el marco de referencia
arbitrario en coordenadas dq.
A.1 Modelo trifásico
Todo modelo matemático inicia definiendo las limitaciones y consideraciones que se
deben tomar en cuenta para concluir con un modelo que permita cierta sencillez sin dejar
fuera los fenómenos físicos que se desean estudiar. El modelo trifásico de la máquina parte
de las siguientes consideraciones:
• El estator de la máquina es un cilindro de hierro, con sección transversal circular y
una cavidad en la que se encuentra alojado un rotor concéntrico, de tal forma que
existe un entrehierro entre ambos, cuya pequeña longitud radial es constante.
• Los devanados tanto del estator como del rotor son simétricos y tienen una
distribución sinusoidal, de tal forma que producen fuerzas magnetomotrices

Sistema de generación eoloeléctrica
CENIDET 104
(magnetomotive force: m.m.f.) sin distorsión armónica. Además, los devanados del
estator poseen idéntica resistencia (Rs) e igual ocurre con los devanados del rotor
(Rr).
• La parte de los conductores que es responsable de la generación de las fuerzas
magnetomotrices y de la generación del par electromagnético es recta y paralela al
eje de rotación.
• Los devanados están conectados en estrella, con sus neutros aislados.
• Los extremos de los devanados del rotor se encuentran disponibles a través de
anillos deslizantes.
• Tanto el hierro del estator, como el del rotor, está laminado y tiene permeabilidad
infinita. Por lo que las fuerzas magnetomotrices existen solamente en el entrehierro
y son radiales.
• Las pérdidas en el hierro, así como los efectos de la saturación, de ranura y en los
extremos de los devanados se consideran despreciables.
La DFIM idealizada se representa con el diagrama eléctrico mostrado en la Figura A.1,
donde Rs representa la resistencia de los devanados individuales del estator y Rr los del
rotor, Ls representa la inductancia del estator y Lr del rotor.
Figura A.1. Diagrama de la máquina de inducción doblemente alimentada.

Anexo A. Modelado de la DFIM
Dana Luz González Ojeda 105
De acuerdo con la referencia [30] la ecuación de voltaje de (línea a neutro) para la
máquina trifásica es:
as s as as
v R i pλ= ⋅ + (A.1)
bs s bs bs
v R i pλ= ⋅ + (A.2)
cs s cs cs
v R i pλ= ⋅ + (A.3)
ar r ar ar
v R i pλ= ⋅ + (A.4)
br r br br
v R i pλ= ⋅ + (A.5)
cr r cr cr
v R i pλ= ⋅ + (A.6)
Donde: vas, vbs y vcs son los voltajes en el estator, ias, ibs y ics son las corrientes en el
estator, λas, λbs y λcs son los vectores de flujo del estator, Rs es la resistencia del devanado
estatórico, var, vbr y vcr son los voltajes en el rotor, iar, ibr y icr son las corrientes en el rotor,
λar, λbr y λcr son los vectores de flujo del rotor, Rr es la resistencia del devanado rotórico y
p es el operador diferencial d/dt.
La expresión para los enlaces de flujo de cada devanado debe incluir todos los efectos
magnéticos existentes que se relacionan tanto con el mismo devanado como con los
restantes (auto-inducción e inducción mutua). Por lo tanto, los enlaces de flujo están dados
por:
as asas as asbs bs ascs cs asar ar asbr br ascr cr
L i L i L i L i L i L iλ = + + + + + (A.7)
bs bsas as bsbs bs bscs cs ibsar ar bsbr br bscr cr
L i L i L i L i L i L iλ = + + + + + (A.8)
cs csas as csbs bs cscs cs csar ar csbr br cscr cr
L i L i L i L i L i L iλ = + + + + + (A.9)
ar aras as arbs bs arcs cs arar ar arbr br arcr cr
L i L i L i L i L i L iλ = + + + + + (A.10)
br bras as brbs bs brcs cs brar ar brbr br brcr cr
L i L i L i L i L i L iλ = + + + + + (A.11)
cr cras as crbs bs crcs cs crar ar crbr br crcr cr
L i L i L i L i L i L iλ = + + + + + (A.12)
Con el objeto de obtener una forma compacta, tanto en las ecuaciones de voltaje como
en las de enlaces de flujo, es posible utilizar una notación matricial-vectorial, con lo que se
obtiene:

Sistema de generación eoloeléctrica
CENIDET 106
3
3
0
0abcs s abcs abcs
abcr r abcr abcr
v R ip
v R i
λ
λ
= ⋅ +
(A.13)
( )abcs s sr abcs
T
abcr sr r abcr
L L i
L L i
λ
λ
= ⋅
(A.14)
Donde: [ ]T
abc a b cf f f f= (A.15)
3 ,s s r r 3 3 3
R R I R =R I , 0 =0 I = ⋅ (A.16)
1 1
2 21 1
2 21 1
2 2
ls ms ms ms
s ms ls ms ms
ms ms ls ms
L L L L
L L L L L
L L L L
+ − −
= − + −
− − +
(A.17)
1 1
2 21 1
2 21 1
2 2
lr mr mr mr
r mr lr mr mr
mr mr lr mr
L L L L
L L L L L
L L L L
+ − −
= − + −
− − +
(A.18)
( ) ( )
( ) ( )
( ) ( )
r r r
sr sr r r r
r r r
Cos Cos Cos
L L Cos Cos Cos
Cos Cos Cos
θ θ γ θ γ
θ γ θ θ γ
θ γ θ γ θ
=
+ −
⋅ − + + −
(A.19)
Con: 2=3
πγ (A.20)
Donde: Lls y Llr son las inductancias de dispersión de un devanado estatórico o rotórico,
Lms y Lmr son las inductancias mutuas entre dos devanados del estator o dos del rotor, Lsr
son las inductancias mutuas entre un devanado del estator y otro del rotor, ( 2)r m
Pθ θ= es
la posición angular de los ejes asociados con los campos rotóricos, θm es la posición angular
mecánica del eje rotórico y P es el número de polos de la máquina.
Es común que los valores de las variables y de los parámetros del rotor sean referidos
hacia el estator usando las siguientes expresiones:

Anexo A. Modelado de la DFIM
Dana Luz González Ojeda 107
2
' 's s srabcr abcr abcr abcr abcr abcr r r
s r r r
N N NNi i , v' v , y r' r
N N N Nλ λ
= = = =
(A.21)
Las expresiones A.13-A.20 constituyen el modelo trifásico de alto orden con
coeficientes variables de la DFIM. Las inductancias de este modelo, dadas por A.17, A.18 y
A.19, se obtienen mediante la Ley (circuital) de Ampere, suponiendo una distribución
sinusoidal de los devanados y un comportamiento magnético lineal, ignorando fenómenos
como la saturación y la histéresis de los núcleos magnéticos. Además, se considera que la
máquina es simétrica, en otras palabras, todos los devanados del estator son iguales entre sí
y todos los del rotor también, pero los primeros son diferentes de los últimos. Finalmente,
el modelo no considera las variaciones debidas a la temperatura que pueden presentarse en
la magnitud de las resistencias de los devanados.
El modelo se completa con la expresión del par electromagnético (Te) producido por la
DFIM y representado por la expresión A.21.
'
'
2T sr
e abcs abcr
r
LPT i i
θ
∂= ⋅ ⋅
∂ (A.22)
A.2 Modelo en el marco de referencia arbitrario
El modelo dinámico trifásico resulta muy complejo, aún para su utilización en
ambientes de simulación. El trabajo desarrollado en [30] describe la reducción de este
modelo utilizando la transformación del marco de referencia. Esta transformación permite
llevar el modelo trifásico de la DFIm a un modelo bifásico que en principio reduce el orden
de las ecuaciones del modelo.
Aplicando transformación de coordenadas a las ecuaciones obtenidas en el modelo
trifásico de la DFIM se obtiene el modelo bifásico (dq) que se presenta a continuación:
qs
qs s qs ds
dv R i
dt
λωλ= ⋅ + + (A.23)

Sistema de generación eoloeléctrica
CENIDET 108
ds
ds s ds qs
dv R i
dt
λωλ= ⋅ + + (A.24)
( )
qr
qr r qr r dr
dv R i
dt
λω ω λ= ⋅ + − + (A.25)
( ) dr
dr r dr r qr
dv R i
dt
λω ω λ= ⋅ + − + (A.26)
Donde ω es la velocidad del marco de referencia que se utiliza y las variables i y λ se
representan tras la transformación de coordenadas dq como dos componentes bifásicas. Los
enlaces de flujo se representan mediante las siguientes ecuaciones:
( )qs ls qs qr
L M i Miλ = + + (A.27)
( )ds ls ds dr
L M i Miλ = + + (A.28)
( )qr lr qr qs
L M i Miλ = + + (A.29)
( )dr lr dr ds
L M i Miλ = + + (A.30)
Donde: (3 2)ms
M L= y es el valor de la inductancia mutua bifásica.
El par electromagnético, expresado en función de las coordenadas dq, es:
( )
2e ms qs dr ds qr
PT L i i i i= − (A.27)

Anexo B
109
Códigos
En el presenta anexo se muestran los programas completos para obtener la modulación
PWM, para el convertidor back-to-back y para el emulador de carga, cargados en los
dispositivos dsPIC.
B.1 Control del convertidor del lado de la máquina
;
;Título: Control para el MSC ;
;Inicialización de variables y constantes: ;
Frequency:.space 2 Amplitude:.space 2 Phase:.space 2 .equ PWM_Scaling, 230 .equ PWM_Scaling, 249 .equ Offset_120, 0x5555 .section .sine_table, "x" SineTable:
.hword 0x0000,0x0D61,0x1A9C,0x278D,0x340F,0x3FFF,0x4B3B,0x55A5
.hword 0x6ED9,0x74EE,0x79BB,0x7D32,0x7F4B,0x7FFF,0x7F4B,0x7D32

Sistema de generación eoloeléctrica
CENIDET 110
.hword 0x6ED9,0x678D,0x5F1E,0x55A5,0x4B3B,0x3FFF,0x340F,0x278D
.hword 0x0000,0xF29F,0xE564,0xD873,0xCBF1,0xC001,0xB4C5,0xAA5B
.hword 0x9127,0x8B12,0x8645,0x82CE,0x80B5,0x8001,0x80B5,0x82CE
.hword 0x9127,0x9873,0xA0E2,0xAA5B,0xB4C5,0xC001,0xCBF1,0x000 ;
;Programa principal: ;
.text _main:
CALL _wreg_init CALL Setup Loop: best IFS2,#PWMIF
btss IFS2,#PWMIF bra CheckADC call Modulacion bclr IFS2,#PWMIF
CheckADC: btss IFS0,#ADIF bra Loop
CALL ReadADC bra Loop
;
ReadADC: mov ADCBUF0, W0 mov ADCBUF1, W1 asr W0,#5,W4 mov W4,Frequency sl W1,#5,W4 sl W0,#5,W5 mpy W4*W5,A sac A,W0 mov #28000,W1 cp W1,W0
NoLimit: mov W0,Amplitude return
;
Modulacion: mov #tblpage(SineTable),W0 mov W0,TBLPAG mov #tbloffset(SineTable),W0 mov Phase,W1 mov #Offset_120,W4

Anexo B. Códigos
Dana Luz González Ojeda 111
mov Amplitude, W6 mov #PWM_Scaling,W7 mov Frequency,W8 add W8,W1,W1 add W1,W4,W2 add W2,W4,W3 lsr W1,#10,W9 sl W9,#1,W9 lsr W2,#10,W10 sl W10,#1,W10 lsr W3,#10,W11 sl W11,#1,W11
;Fase 1: add W0,W9,W9 tblrdl [W9],W5 mpy W5*W6,A sac A,W5 mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC1
;Fase 2: add W0,W10,W10 tblrdl [W10],W5 mpy W5*W6,A sac A,W5 mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC2
;Fase 3: add W0,W11,W11 tblrdl [W11],W5 mpy W5*W6,A sac A,W5 mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC3 mov W1,Phase return
.end

Sistema de generación eoloeléctrica
CENIDET 112
B.2 Control del convertidor del lado de la red
;
;Título: Control para el GSC ;
;Inicialización de variables y constantes en la memoria de datos: ;
Frequency:.space 2 Amplitude:.space 2 Phase:.space 2 .equ PWM_Scaling, 230 .equ PWM_Scaling, 249 .equ Offset_120, 0x5555 .section .sine_table, "x" SineTable:
.hword 0,3212,6393,9512,12539,15446,18204,20787,23170,25329
.hword 27245,28898,30273,31356,32137,32609,32767,32609,32137,31356
.hword 27245,25329,23170,20787,18204,15446,12539,9512,6393,3212,0,-3212
.hword -9512,-12539,-15446,-18204,-20787,-23170,-25329,-27245,-28898,-30273
.hword -31356,-32137,-32609,-32767,-32609,-32137,-31356,-30273,-28898
.hword -25329,-23170,-20787,-18204,-15446,-12539,-9512,-6393,-3212 ;
;Programa principal: ;
.text _main:
CALL _wreg_init CALL Setup Loop: best IFS2,#PWMIF
btss IFS2,#PWMIF bra CheckADC call Modulacion bclr IFS2,#PWMIF
CheckADC: btss IFS0,#ADIF bra Loop
CALL ReadADC bra Loop
;
ReadADC: mov ADCBUF0, W0 mov ADCBUF1, W1

Anexo B. Códigos
Dana Luz González Ojeda 113
asr W0,#5,W4 mov W4,Frequency sl W1,#5,W4 sl W0,#5,W5 mpy W4*W5,A sac A,W0 mov #28000,W1 cp W1,W0
NoLimit: mov W0,Amplitude return
; Modulacion:
mov #tblpage(SineTable),W0 mov W0,TBLPAG mov #tbloffset(SineTable),W0 mov Phase,W1 mov #Offset_120,W4 mov Amplitude, W6 mov #PWM_Scaling,W7 mov Frequency,W8 add W8,W1,W1 add W1,W4,W2 add W2,W4,W3 lsr W1,#10,W9 sl W9,#1,W9 lsr W2,#10,W10 sl W10,#1,W10 lsr W3,#10,W11 sl W11,#1,W11
;Fase 1: add W0,W9,W9 tblrdl [W9],W5 mpy W5*W6,A sac A,W5 mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC1
;Fase 2: add W0,W10,W10 tblrdl [W10],W5 mpy W5*W6,A sac A,W5
Sistema de generación eoloeléctrica
CENIDET 114
mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC2
;Fase 3: add W0,W11,W11 tblrdl [W11],W5 mpy W5*W6,A sac A,W5 mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC3 mov W1,Phase return
.end
B.3 Control del convertidor CD/CD
;
;Título: Control para el ciclo de trabajo del emulador ;
;Inicialización de variables y constantes en la memoria de datos: ;
Frequency:.space 2 Amplitude:.space 2 Phase:.space 2 .equ PWM_Scaling, 230 .equ PWM_Scaling, 249 .section .sine_table, "x" SineTable:
.hword 0x0000,0x0D61,0x1A9C,0x278D,0x340F,0x3FFF,0x4B3B,0x55A5,0x5F1E
.hword 0x678D,0x6ED9,0x74EE,0x79BB,0x7D32,0x7F4B,0x7FFF,0x7F4B,0x7D32
.hword 0x79BB,0x74EE,0x6ED9,0x678D,0x5F1E,0x55A5,0x4B3B,0x3FFF,0x340F
.hword 0x278D, 0x1A9C,0x0D61,0x0000,0xF29F,0xE564,0xD873,0xCBF1,0xC001
.hword 0xB4C5, 0xAA5B,0xA0E2,0x9873,0x9127,0x8B12,0x8645,0x82CE,0x80B5
.hword 0x8001,0x80B5,0x82CE,0x8645,0x8B12,0x9127,0xC001,0xCBF1,0x0000 ;
;Programa principal: ;
.text

Anexo B. Códigos
Dana Luz González Ojeda 115
_main: CALL _wreg_init CALL Setup Loop: best IFS2,#PWMIF
btss IFS2,#PWMIF bra CheckADC call Modulacion bclr IFS2,#PWMIF
CheckADC: btss IFS0,#ADIF bra Loop
CALL ReadADC bra Loop
;
ReadADC: mov ADCBUF0, W0 mov ADCBUF1, W1 asr W0,#5,W4 mov W4,Frequency sl W1,#5,W4 sl W0,#5,W5 mpy W4*W5,A sac A,W0 mov #28000,W1 cp W1,W0
NoLimit: mov W0,Amplitude return
; Modulacion:
mov #tblpage(SineTable),W0 mov W0,TBLPAG mov Phase,W1 mov Amplitude, W6 mov #PWM_Scaling,W7 mov Frequency,W8 add W8,W1,W1 lsr W1,#10,W9 sl W9,#1,W9 lsr W2,#10,W10 add W0,W9,W9 tblrdl [W9],W5 mpy W5*W6,A sac A,W5

Sistema de generación eoloeléctrica
CENIDET 116
mpy W5*W7,A sac A,W8 add W7,W8,W8 mov W8,PDC1
.end

Anexo C
117
Librerías de simulación
En este anexo se presentan las librerías que se utilizan para la simulación del sistema de
generación eoloeléctrico aislado.
C.1 Sistema de generación eoloeléctrica
Para realizar la simulación del sistema de generación eoloeléctrico se considera el
diagrama eléctrico que se muestra en la Figura C.1.
Las ecuaciones que describen la parte eléctrica del sistema pueden obtenerse mediante
leyes de Kirchoff. Utilizando el modelo trifásico de la DFIM presentado en el Anexo A las
ecuaciones del sistema eléctrico son:
( )
2 33 2 3
1 3 3 1 3 3
3 3 2 3 3 3 2 3
( ) /
( ) 0 ( ) / ( ) 0
0 ( ) 0 ( )
s srs g s sr s
T T
sr r r r sr r r
L L g g L L g
L L L I i V r I d L dt r I id
L L L I i V d L dt r r I idt
L I L L I i V r I r r I i
− −
+ = − + − − − − − +
(C.1)
Corriente en la carga: L s gi i i= − − (C.2)

Sistema de generación eoloeléctrica
CENIDET 118
Voltaje en la carga: 3 3 3 s abcs( ) / I i +d( )/dt
L s L L L L sv v r I i d L I i dt r λ= = + = (C.3)
Donde: [ ] [ ]T T
s as bs cs r ar br cri i i i , i = i i i= (C.4)
[ ]T T
g ag bg cg L aL bL cLi i i i , i = i i i = (C.5)
[ ]T T
g ag bg cg L ar br crv v v v , i = v v v = (C.6)
MSC GSC
r1
r1
r1
R2 R2 R 2
L2 L2 L2
L1
L1
L1
LL LL LL
RL RL RL
Rr
Ls
ias
ibs
ics
iar
ibr
icr
iag ibg icg
iaL
ibL
icL
DFIG
var
vbr
vcr
vag vbg vcg
Carga
RrRr
Rs Rs Rs
Ls Ls
Lr Lr Lr
Figura C.1 Sistema de conversión de energía eoloeléctrica aislado.
El modelo que se utiliza en simulación se muestra en la Figura C.2. Para su desarrollo
se utilizan las ecuaciones descritas en el Capítulo 2. El sistema consta de las siguientes
etapas:
a. Motor de corriente directa.
b. Máquina de inducción doblemente alimentada.
c. Convertidor del lado de la máquina.
d. Convertidor del lado de la red.
e. Enlace de CD.
f. Control del MSC.
g. Control del GSC.
h. Carga.

Anexo C. Librerías de simulación
Dana Luz González Ojeda 119
Figura C.2 Sistema de generación eoloeléctrica.
C.2 Máquina de inducción doblemente alimentada
Para la simulación de la DFIM se utiliza el modelo trifásico de la máquina, descrito en
el Anexo A. Este modelo se implementa con funciones S de Matlab. La función se llama
IsWECS.m, la Tabla C.1 muestra las entradas y salidas de la función y la Figura C.3
muestra el modelo implementado en Simulink.
Tabla C.1 Entradas y salidas de la función IsWECS.
Entradas vas vbs vcs var vbr vcr
Salidas ias ibs ics iar ibr icr ωm θr Te
Figura C.3 Máquina de inducción doblemente alimentada.

Sistema de generación eoloeléctrica
CENIDET 120
C.3 Motor de corriente directa
En la simulación de la parte mecánica del sistema se considera un motor de CD,
controlado en velocidad que impulsa al DFIG. El acoplamiento entre las dos máquinas se
realiza a través de un eje rígido con una caja de engranes ideal.
La función S que se utiliza se llama DC_Mach y las ecuaciones implementadas se
describen a continuación.
Para el circuito de campo:
f
f f f f
div r i L
dt= ⋅ + (C.7)
Para el circuito de armadura:
a
a a a a m af f
div r i L L i
dtω= ⋅ + + (C.8)
Par electromagnético:
m af f a
T L i i= ⋅ (C.9)
En la Figura C.4 se muestra el esquemático para el motor de CD que impulsa al DFIG.
Figura C.4 Motor de CD.

Anexo C. Librerías de simulación
Dana Luz González Ojeda 121
C.4 Convertidor back-to-back
A. Convertidor del lado de la máquina
Las expresiones para el modelo del MSC se presentan en el Capítulo 2, las expresiones
utilizadas son C.10 y C.11. La expresión C.10 se refiere a la ecuación de voltaje para el
MSC y la expresión C.11 presenta la corriente en el enlace de CD. En la Figura C.5 se
presenta la implementación de estas expresiones.
1
2
3
2 1 11
1 2 13
1 1 2
ar r
br r o
cr r
v g
v g V
v g
− −
= − − − −
(C.10)
1 1 2 3o r ar r br r cr
I g i g i g i= + + (C.11)
Figura C.5 Modelo para el MSC.
B. Convertidor del lado de la red
Las ecuaciones para obtener el modelo del GSC se presentan en C.12 y C.13, al igual
que para el MSC, se utilizan las ecuaciones de voltaje y corriente que describen al GSC. En
la Figura C.6 se presenta el modelo.
1
2
3
2 1 11
1 2 13
1 1 2
ag g
bg g o
cg g
v g
v g V
v g
− −
= − − − −
(C.12)
2 1 2 3o g ag g bg g cg
I g i g i g i= + + (C.13)

Sistema de generación eoloeléctrica
CENIDET 122
Figura C.6 Modelo para el GSC.
C. Enlace de CD
Las ecuaciones C.14 y C.15 describen el voltaje y corriente a través del enlace de CD y
en la Figura C.7 se muestra el modelo del enlace de CD.
1 2
0c o o
I I I+ + = (C.14)
( )o
o1 o2
o
dV 1=- I I
dt C+ (C.15)
Figura C.7 Modelo para el enlace de CD.
C.5 Control del MSC
Las ecuaciones que se utilizan para implementar el control para el MSC se describen en
el Capítulo 2. El controlador se implementa con funciones S. En esta función se tienen: la
transformación de coordenadas de abc a dq, controladores de voltaje y corriente. En la
Figura C.8 se muestra el modelo implementado en Simulink de Matlab.

Anexo C. Librerías de simulación
Dana Luz González Ojeda 123
Figura C.8 Controlador para el MSC.
C.6 Control del GSC
Las ecuaciones que se aplican para obtener el modelo del controlador son las descritas
en el Capítulo 2, para mayor claridad se incluyen a continuación.
En la primera etapa del controlador se realiza un cambio de coordenadas de abc hacia
dq, este cambio se hace en el voltaje y la corriente del estator, aplicando las siguientes
expresiones. Las expresiones para voltaje y corriente son las mismas, debido a esto sólo se
presentan las expresiones para el voltaje.
1 11 2 2
0 3 32 2
sa
s
sb
s
sc
vv
k vv
v
α
β
− − =
−
(C.16)
( ) ( )ds s d r s d r
v v Cos v Senα β
θ θ θ θ= − + − (C.17)
( ) ( )qs s d r s d r
v v Sen v Cosα β
θ θ θ θ= − − + − (C.18)
Cuando se tienen los voltajes y corrientes en coordenadas dq, se procede a aplicar la
técnica de control vectorial descrita en la Figura 2.13. Dentro del bloque del controlador se
incluyeron mediciones de potencia, para las cuales se aplicaron las expresiones C.19, C.20
y C.21.

Sistema de generación eoloeléctrica
CENIDET 124
d d q q
P v i v i= + A.9.1
d q q d
Q v i v i= − A.9.2
2 2S P Q= + A.9.3
En la Figura C.9 se muestra la implementación del controlador del GSC.
Figura C.9 Controlador del GSC.

cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
“Convertidor Back-to-Back para el Banco de Pruebas de Conversión Eoloeléctrica en un Sistema Aislado”
presentada por
Dana Luz González Ojeda Ing. Electrónico por el I. T. de Orizaba
como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Electrónica
Director de tesis: Dr. Jesús Aguayo Alquicira
Co-Director de tesis: Dra. María Cotorogea Pfeifer
Jurado: Dr. Jaime Eugenio Arau Roffiel – Presidente Dr. Abraham Claudio Sánchez – Secretario
Dr. Jesús Aguayo Alquicira – Vocal Dr. Mario Ponce Silva – Vocal Suplente
Cuernavaca, Morelos, México. 18 de Abril de 2008






























