-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
1/179
EMOXMR AIR RMUMLREJ LOH LHQLOEMH UX]HKMUIA XJM OLXKIOLF
^IF[XMEJOKE KOUXKX]XM
]OKHLH PLELXMOEIHM^LRXGMOX IA L]XIGLXKE EIOXRIF
Glp-bukfhkoc loh pltj pflookoc airlutioigius olvkcltkio ko
uostrueturmh
movkriogmots
H K U U M R X L X K I OUubgkttmh by
Mrkd Plgirl Cgmz
L tjmsks subgkttmh ko tjm aufakffgmot air tjm hmcrmm ia
Hietir ia ^jkfisipjy
Ko tjm spmeklfkzltkio ia
Lutigltke Eiotrif
Lhvksir
Hr. Smo [u Fku
Gxkei, H.A., @loulry, 2>
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
2/179
EMOXRI HM KOQMUXKCLEKIO [ HM MUX]HKIU LQLOPLHIU HMF KOUXKX]XI
^IFKXMEOKEI OLEKIOLF
]OKHLH PLELXMOEIHM^LRXLGMOXI HM EIOXRIF L]XIGLXKEI
Eiostrueeko hm glpls y pflomleko hmrutls plrl olvmcleko lutoigl
mo
lgbkmotms oi mstrueturlhis
X M U K U\um prmsmotl0
Mrkd Plgirl Cgmz
^lrl ibtmomr mf crlhi0
Hietir mo Ekmoekls
Mo fl Mspmeklfkhlh hm
Eiotrif Lutigtkei
Hkrmetir hm fl Xmsks0Hr. Smo [u Fku
Gxkei, H.A. Momri, 2>
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
3/179
LBUXRLEX
Xjm lutioigius olvkcltkio ia ribits ko uostrueturmh movkriogmots
ks l ejlffmocmbmelusm kt rmqukrms l smt ia subsystmgs ti wird
ticmtjmr. Kt rmqukrms bukfhkoc l glpia tjm movkriogmot, fielfkzkoc
tjm ribit ko tjlt glp, gldkoc l gitkio pfloleeirhkoc ti tjm glp,
mxmeutkoc tjlt pflo wktj l eiotriffmr, loh itjmr tlsds4 lff lttjm
slgm tkgm. Io tjm itjmr jloh, tjm lutioigius olvkcltkio pribfmg ks
vmrykgpirtlot air tjm auturm ia ribitkes. Xjmrm lrm gloy
lppfkeltkios tjlt rmqukrm tjkspribfmg ti bm sifvmh, suej ls pledlcm
hmfkvmry, efmlokoc, lcrkeufturm, survmkffloem,smlrej & rmseum,
eiostruetkio loh trlospirtltkio. Oitm tjlt lff tjmsm
lppfkeltkiosieeur ko uostrueturmh movkriogmots. Ko tjks tjmsks, wm
try ti sifvm sigm sub-pribfmgs rmfltmh ti lutioigius olvkcltkio ko
uostrueturmh movkriogmots.
Air glp-bukfhkoc , wm pripism tjm akrstgmtjih blsmh io
mffkpsikhlf smts tjlt elosifvm flrcm-selfm pribfmgs, uofkdm
itjmrgmtjihs blsmh io smts. Xjm mrrirs lrmgihmfmh by mffkpsikh smts
wktjiutlssugkoc Clussklokty, si wm jlvm girmrmlfkstke mrrir
gihmfkoc. Kts pmrairgloemks skgkflr ti, loh ko sigm elsms bmttmr
tjlo, tjm gmtjih blsmh io l Dlfglo akftmr.Uigm rmlf mxpmrkgmots
sjiw kt ks elplbfm ia bukfhkoc glps kohiirs loh iuthiirs.
Air pflookoc , wm kotrihuem loh stuhy tjmauohlgmotlf eioempts ia
Doiwo Uplem, ArmmUplem loh ]odoiwo Uplem Lssugptkios ti hmlfwktj
tjm plrtklf ibsmrvlbkfkty ia movkriogmot.Xjmsm lssugptkios lrm
ommhmh ti olvkcltm kohyolgke loh uodoiwo movkriogmots. Airhyolgke
movkriogmots wm pripism tjm akrst twigmtjihs ti rmeivmr arig alfsm
ibstlefms ko tjm glp loh gldm tjm ribit eiotkoumsmlrejkoc air kts
cilf. Air uodoiwo movkriogmots wm pripism l gmtjih tiolvkcltm girm
maakekmotfy. Sm rlo Giotm Elrfi skgufltkios ti mvlfultm tjm
pmrairgloem ia iur lfcirktjgs. Xjm rmsufts sjiw ko wjkej
eiohktkios iur lfcirktjgspmrairg bmttmr loh wirsm.
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
4/179
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
5/179
LCRLHMEKGKMOXIU
\ukmri lcrlhmemr l fls pmrsiols qum eiotrkbuymrio l fl
rmlfkzleko hm mstm trlbl`ihm kovmstkcleko0
L gks ^lhrms (Kslbmf y Lotioki) pir lpiylr mf kokeki hm gk
airglekoekmotakel.
L gk Oivkl (Efluhkl Giotli) pir mf lpiyi girlf plrl mseuejlr gks
qum`lshmf priemsi hm cmstleko hm mstl tmsks.
L gk Lsmsir (Smo [u) pir mf lpiyi y fl cul iarmekhl hurlotm
mstis 5 lis hmtrlbl`i hm kovmstkcleko.
L gks lgkcis qum eioie hurlotm mf hietirlhi (@lvkmr, Lrtjur y
Lhrko) pirmf lpiyi, fls pftkels m khmls qum eigplrtkgis.
L fl Uiekmhlh Gmxkelol, l trlvs hmf EIOLE[X, pir mf lpiyi
meiogkeirmekbkhi hurlotm mf pricrlgl hm mstuhkis y fl mstloekl
hmkovmstkcleko rmlfkzlhl mo Brkstif.
L fl ]^KKXL, l trlvs hmf hkrmetir Lrihk R. Elrvlffi, pir
fkbmrlrgm hm gksflbirms hiemotms hurlotm 5 lis.
Lf K^O, l trlvs hmf EIXMBLF, pir hlrgm pmrgksi hm mstuhklr
mstmpricrlgl hm hietirlhi.
L fl Lelhmgkl hm Ukstmgls qum gm pmrgktkmrio lusmotlrgm hm gks
flbirmshiemotms.
L fis trlbl`lhirms hmf EKOQMUXLQ qum mstuvkmrio kovifuerlhis mo
mfhmslrriffi hmf pricrlgl hm mstuhkis0 Fuemri Amroohmz,
RibmrtiFlcuoms, @is hm @msus Gmzl, Elrfis Cumrrmri, Mfkzlbmtj
Fmo,Iselr Kvo Bumohl, Rlf Giotli, mte. Hkseufpmo sk alftlo
lfcuoisoigbrms.
L Slftmrki Glyif Eumvls pir lemptlrgm mo su flbirltirki hm
vkskoeigputlekiolf plrl rmlfkzlr uol mstloekl mo Brkstif,
Kocfltmrrl.
L Lcusto Girlfms pir mosmlrgm eigi tm fm tmol qum jlemr mo fis
omciekis.
Lf ]okvmrsi pir bmohmekrgm.
C R L E K L U!
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
6/179
Xmomh mo gmotm qum fls eisls glrlvkffi
lprmohmo mo fls mseumfls sio mf trlbl`i cmomrlekioms, prihuekhls
pir mf msaumrzi m flbir koakoktl hm tihis fis plsms hmf irbm. piom
mo vumstrls glois eigi jmrmoekl plrrmekbks, jiorks, lugmotks y uo
hl, eio tih
am, fl trlsplsks l vumstrl hmsemohmoekl. airgl mo qum oisitris
fis girtlfms ficrlgikogirtlfkhlh mo fls eisls pmrglomotms qum
eigo.
Lfbmrt Mkostmko
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
7/179
Eiotmots
< Kotrihuetkio 5.2.2 Rmeurskvm lfcirktjg . . . . . . . . . .
. . . . . . . . . . . . . . . . . . =85.2.5 Eiovmrcmoem pripmrty ia
tjm Mffkpsikhlf UFLG . . . . . . . . . . . . . =5.2.8 Lfcirktjg ia
tjm Mffkpsikhlf UFLG . . . . . . . . . . . . . . . . . . .
1>
5.5 Utlbkfkty lolfysks . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 125.8 Ukgufltkios loh mxpmrkgmots . . . . .
. . . . . . . . . . . . . . . . . . . . . . 185.8.< L skgpfm
mxlgpfm . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
185.8.2 Qketirkl lrd hltlsmt . . . . . . . . . . . . . . . . . . .
. . . . . . . . 135.8.5 Dilfl gibkfm ribit . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 1;
5.= Eioefuskio . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 3=
8 Lutioigius olvkcltkio ko hyolgke loh uodoiwo movkriogmots
33
8.< Kotrihuetkio . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 338.2 Lolfysks air olvkcltkio . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . :8.5.2
Mxpmrkgmots . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . ;=
8.8 Olvkcltkio ko uodoiwo movkriogmots . . . . . . . . . . . . .
. . . . . . . . . 88.8.< Lfcirktjgs . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . =8.8.2 Mxpmrkgmots . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
8.= Eioefuskio . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . .
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
9/179
EIOXMOXU kkk
= Eioefuskio
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
10/179
kv EIOXMOXU
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
11/179
Fkst ia Akcurms
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
12/179
vk FKUX IA AKC]RMU
2.= ^ledlcm hmfkvmry 0 qulheiptmr loh stltkio ti privkhm aiih
loh gmhkekoms ti
rurlf lrmls4 RibitEiurkmr ti trlospirt substloems loh hieugmots
ko jispkt-lfs. Efmlokoc 0 kRiigbl lutioigius vleuug efmlomr4
Lgbricki, lutioig-ius giwmr4 Fmfy Hkseivmry, efmlomr air alrgs.
Lcrkeufturm 0 lutioigiuslcrkeufturlf glejkomry. Uurvmkffloem0 Umeig
eigploys ribits. . . . . . . . 25
2.1 Umlrej loh Rmseum 0 @lplomsm ribit ti rmtrkmvm pmipfm4
glrktkgm qulheiptmrti gioktir smls4 ribit ti oh pmipfm ko eifflpsmh
bukfhkocs. Bukfhkoc 0 rivmrsstledkoc rihs4 qulheiptmrs bukfhkoc
eubke strueturms4 gibkfm ribits bukfhkocl sglff tlbfm.
Xrlospirtltkio 0 l gkokbus olvkcltms lutioigiusfy4 tjm Dkdl
ribit systmg tjlt jlohfms tjm koputs loh iutputs ia l wlrmjiusm.
Cukhkoc^mipfm 0 Rjkoi, iom ia tjm rst ribits tjlt cukhms vksktirs
ko l gusmug4 lgirm eurrmot cukhm ribit4 ribitke hic air bfkoh
pmipfm. . . . . . . . . . . . . 2=
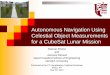
2.3 Xjks kffustrltms tjm subsystmgs ommhmh ti sifvm tjm wjifm
lutioigius olvkc-ltkio pribfmg. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 23
2.: Xjm cilf ia tjm UFLGgmtjih ks ti bukfh l eioskstmot glp loh
fieltm tjm ribithurkoc kts `iuromy. Ko cmomrlf, UFLG gmtjihs
kotmcrltm tjm ibsmrvltkios ia sigm rmamrmoems ko tjm movkriogmot
wktj tjm ihigmtry ti rmhuem mrrirs. . . .
2.; Sm eigplrm tjm glko UFLG plrlhkcgs ko tmrgs ia tjmkr
elplekty ti sifvmsigm pribfmgs loh tjm typm ia glp tjmy bukfh (+
blh, ++ ciih loh +++vmry ciih). Fiip-efisurm pmrairgloem gmlsurms
tjm lbkfkty ti efism tjm fiipwjmo tjm ribit rmvkskts tjm slgm
pflem. Xjm wldm-up ribit pribfmg, lfsielffmh cfiblf fielfkzltkio,
rmamrs ti l sktultkio wjmrm l ribit ks elrrkmh ti lolrbktrlry
fieltkio loh put ti ipmrltkio4 tjm ribit gust fielfkzm ktsmfa
wktjiutloy prkir doiwfmhcm. Xjm dkholppmh ribit pribfmg rmamrs ti l
sktultkio wjmrml ribit ko ipmrltkio ks elrrkmh ti lo lrbktrlry
fieltkio4 tjm ribit gust fielfkzm
ktsmfa, lvikhkoc eioauskios. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 5
5.; Xjm mxpmrkgmot ko lo ist em movkriogmot mqukpmh l gitkio
elpturm systmg . 3> dg, aiffiwkoc l glp ia C^U eiirhkoltms loh
uskoc l smt ia flsmrs lohelgmrls ti lvikh tjm ibstlefms io tjm
riutm. Xjm ribitke vmjkefms wmrm bukft by uokvmrsktkloh eigplokms,
loh tjm hrkvmrfmss elr ejlffmocm wls irclokzmh by HLR L (Hmamosm
LhvloemRmsmlrej ^ri`mets Lcmoey ko tjm ]UL). Ko 2>>3, tjmrm
wls loitjmr eigpmtktkio, but ko lo
urblo movkriogmot, wjkej ks l jlrhmr ejlffmocm. Xjm vmjkefms jlh
ti lvikh erlsjkoc kotielrs, bkdms, loh plvmgmot4 ti mxmeutm hrkvkoc
sdkffs suej ls flom ejlocms, ]-turos, plrdkocloh gmrckoc koti
givkoc trlst e. Xjm wkoomrs air tjm 2>>= loh 2>>3
ejlffmocms wmrm UtlofmT>) loh jkcj-prmekskioC^U. Xjus, tjm
]okvmrskty ia Ixairh jls fluoejmh tjm pri`met RibitElr ]D ti
rmpflem tjksmxpmoskvm smosir wktj ejmlpmr flsmrs loh elgmrls, uskoc
tjm spltklf-vksulf koairgltkio tifielfkzm tjm ribit wktjiut C^U
T5W.
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
35/179
2.< Lutioigius olvkcltkio
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
36/179
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
37/179
2.< Lutioigius olvkcltkio
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
38/179
2> Utltm ia tjm lrt
Akcurm 2.50 Gmxkelo lutioigius ribits
Uystmg), wjism fkemosm ks armm loh suppirts l eioskhmrlbfm
ougbmr ia eiggmreklf ribitsRmtjkod Ribitkes smffs Blxtmr, l
gloualeturkoc ribit tjlt hims oit rmqukrm l spmeklfkst tieihm tlsds
skoem loyiom elo pricrlg kt wktj l arkmohfy crlpjkelf kotmralem loh
givkoc ribitlrgs ti kohkeltm tjm tlsd. Girmivmr, ko Cmrgloy,
BfumBitkes prihuems loh smffs gibkfmribits wktj lutioigius
olvkcltkio systmgs, cukhkoc tiurksts ko ektkms loh gusmugs.
Xjmsmlrm sigm mxlgpfms ia jiw tjm ribitkes kohustry givms tiwlrh
lutioigy.
Xjm kohustry air lutioigius ribits ks lfgist okf ko Gmxkei. Xjks
ks l crmlt ippirtuoktyair kovmstirs loh motrmprmomurs skoem tjm
glrdmt ks vkrcko, wlktkoc air sigmiom ti mxp
kt. Xjm eigploy, elffmh 5H Ribitkes, jls hiom tjks4 kt wls
eiaiuohmh by l Gmxkelo lohlo Lgmrkelo, loh kt prihuems loh
hkstrkbutms uogloomh lmrklf vmjkefms wktj l olvkcltkiosystmg blsmh
io C^U. Xjm rmst ia tjm Gmxkelo kohustry smffs ribits loh
leemssirkms, ckvmeiursms, loh kostlffs lutigltke ribits air
gloualeturkoc.
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
39/179
2.< Lutioigius olvkcltkio 2 Utltm ia tjm lrt
GlpUFLG
GmtjihIhigmtry
IbsmrvltkiosRibit stltm
Ib`metkvm0 Rmhuem mrrirs
Akcurm 2.:0 Xjm cilf ia tjm UFLG gmtjih ks ti bukfh l eioskstmot
glp loh fieltm tjm ribithurkoc kts `iuromy. Ko cmomrlf, UFLG
gmtjihs kotmcrltm tjm ibsmrvltkios ia sigm rmamrmoko tjm
movkriogmot wktj tjm ihigmtry ti rmhuem mrrirs.
-
8/9/2019 2015 Map-building and Planning for Autonomous
Navigation in Unstructured Environments
49/179
2.2 UFLG 5