Embed Size (px)
Citation preview

1
Solar Based Propulsion System UAV Conceptual Design (*)
Solar Based Propulsion System UAV Conceptual Design (*)
Avi Ayele*§, Ohad Gur§, and Aviv Rosen*
*Technion – Israel Institute of Technology§IAI – Israel Aerospace Industries
Avi Ayele*§, Ohad Gur§, and Aviv Rosen*
*Technion – Israel Institute of Technology§IAI – Israel Aerospace Industries
3rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
(*)Ayele A., Gur O., Rosen A., "Conceptual MDO of solar powered UAV," 53rd Israel Annual Conference on Aerospace Sciences, March 6-7, 2013, Israel

23rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Ragone Chart
1.E-02
1.E-01
1.E+00
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
1.E+08
1.E+09
1.E-02 1.E-01 1.E+00 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05
Specific Energy [W-hr/kg]
Sp
eci
fic
Po
we
r [W
/kg
]
Carbon Nano Tubes
Shape Memory
Alloy
Metal Spring
Phase Change
Materials
Internal
Combustion
Engine
Fuel Cell
Flywheel
Li-Ion
Battery
Pneumatics
Synthetic Muscle
Radioisotope
Thermoelectric
Generator
Solar Panels
Ragone ChartCurtsey of Lidor A., Weihs D., Sher E.
Ragone ChartCurtsey of Lidor A., Weihs D., Sher E.
Lidor A., Weihs D., Sher E., “Alternative Power-Plants for micro aerial vehicles (MAV),”
53rd Israel Annual Conference on Aerospace Sciences

33rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Ragone Chart
1.E-02
1.E-01
1.E+00
1.E+01
1.E+02
1.E+03
1.E+04
1.E+05
1.E+06
1.E+07
1.E+08
1.E+09
1.E-02 1.E-01 1.E+00 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05
Specific Energy [W-hr/kg]
Sp
eci
fic
Po
we
r [W
/kg
]
Carbon Nano Tubes
Shape Memory
Alloy
Metal Spring
Phase Change
Materials
Internal
Combustion
Engine
Fuel Cell
Flywheel
Li-Ion
Battery
Pneumatics
Synthetic Muscle
Radioisotope
Thermoelectric
Generator
Solar Panels
Ragone ChartCurtsey of Lidor A., Weihs D., Sher E.
Ragone ChartCurtsey of Lidor A., Weihs D., Sher E.
Lidor A., Weihs D., Sher E., “Alternative Power-Plants for micro aerial vehicles (MAV),”
53rd Israel Annual Conference on Aerospace Sciences

43rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Firsts StepsFirsts Steps
1st “Solar” Vehicle
Sunrise II, Nov. 1975
1st Manned “Solar” Vehicle
Solar Riser, April 1979
1st Manned Solar Vehicle
Gossamer Pinguin, May 1980
André Noth, “History of Solar Flight,” Autonomous System Lab, Swiss Federal Institute of Technology, Zürich, July 2008
Crossing the English Channel
Solar Challenger, July 1981
Endurance Record, 2 Weeks Flight
Qinetiq Zephyr, July 2010

53rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
NASA HALEs (High Altitude, Long Endurance)NASA HALEs (High Altitude, Long Endurance)
Pathfinder
1994-1998
70,500 ft, 1998
b = 30m
AR=12
m=250 kg
Centurion
1997-1999
80,000 ft (goal)
b=63m
AR=26
m=860kg
Helios
1999-2003
96,800 ft, 2001
b=75m
AR=31
m=930kg
Dryden Flight Research Center Website, www.nasa.gov [cited: February 2013)
Pathfinder-Plus
1998-2002
80,200 ft, 1998
b = 37m
AR=15
m=315 kg

63rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Main Design ChallengeMain Design Challenge
Energy Balance
Solar Panels Efficiency
Energy Storage Weight / Volume
Aerodynamics
Structure (Weight)

73rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Main Design ChallengeMain Design Challenge
Energy Balance
Solar Panels Efficiency
Energy Storage Weight / Volume
Aerodynamics
Structure (Weight)
MDO: Multidisciplinary
Design
Optimization
Solution

83rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Performance, Like Sausages…Performance, Like Sausages…
Power
WeightD
rag
Performance
Mission
Laws, like sausages, cease to inspire respect in proportion as we know how they are made
(John Godfrey Saxe, 1869)

93rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Analysis ModelAnalysis Model
Solar Radiation Model
Date, Time, Location, Attitude
Aerodynamic Model
Air-Vehicle Geometry
Weight Estimation
Energy Balance
Vehicle
Weight
Drag
PolarAvailable
Power
Mission Definition
Flight
Condition
Mission
Feasibility
Power
WeightD
rag
Performance
Mission

103rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Solar Radiation ModelSolar Radiation Model
Based on ESDU formulation
Time (date / hour)
Latitude / Longitude
Altitude
Attitude
Engineering Sheet Data Units, "Solar heating: total direct irradiance within the earth’s atmosphere,"
ESDU 69015, September 1975
August 2012 , Israel
0
200
400
600
800
1000
1200
1400
1600
0:00 2:00 4:00 6:00 8:00 10:00 12:00 14:00 16:00 18:00 20:00 22:00 0:00
Time
Wat
t/S
qrm
Total Solar Irradiance Outside Earth's Atmosphere
Total Solar Irradiance at Sea Level
Horizontal Surface to the Earth
Israel Meteorological Service
Sunrise Sunset

113rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Aerodynamic Drag EstimationAerodynamic Drag Estimation
Lift dependent drag
Only induced
Simple Oswald factor (e = 0.9)
Zero lift drag
Drag bookkeeping
Form-Factor
Interference-Factor
2
0e
1LDD C
ARCC
π+=
S
SIFFFCC iWet
iiifi0D
−−− =
1.1
244.1.1
,
2
,
=
++=
Wingi
Wingi
IF
c
t
c
tFF
( )1
0025.060
1
.,
..
.
2
...
.,
=
++=
Fusei
FuseFuse
Fuse
FuseFuseFuse
Fusei
IF
HW
L
HWLFF
Wing Fuselage
Roy T. Schemensky, “Development of an empirically based computer program to predict the aerodynamics characteristics of aircraft.
Volume 1, Empirical methods,” Air Force Flight Dynamic Laboratory, AD-780-100, November 1973

123rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Weight EstimationWeight Estimation
Weight Bookkeeping
Structure
Propulsion system
Batteries
Solar Panel
Payload
A. Noth, "Design of Solar Powered Airplanes for Continuous Flight,"
Ph.D. Thesis, ETH, Eidgenössische Technische Hochschule Zürich,
September 2008
Motor Weight Estimation

133rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Structure Weight EstimationStructure Weight Estimation
311.0556.1
,
005.0312.1
,
005.0312.1
,
25.01.3
,
763.8
8.225.1
19.15
44.0
−
−
−
−
=
=×
=
=
ARbm
ARbm
ARbm
ARbm
StenderStructure
RizzoStructure
RizzoStructure
NothStructure
0
100
200
300
400
500
600
700
800
900
1000
0 10 20 30 40 50 60 70 80
Actual Mass
Noth
Stender
Rizzo
Rizzo X 1.5
b, m
mS
tru
ctu
re,
kg
Pathfinder Pathfinder Plus
Centurion
Icare II
Helios

143rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Mission DefinitionMission Definition
Sunrise
Sunset Sunset
Sunrise
70,000 ft
S.L
<70,000 ft
200 ft/min
200 ft/min

153rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Mathematical Programming FormulationMathematical Programming Formulation
( )
( ) 0
..
min
≤
ℜ∈
xg
xfx
ts
n
f(x) – cost function
Vehicle mass
Night time altitude
Payload mass
x – design variables
Wing dimension
Battery mass
g(x) – design constraints
Energy balance
163rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
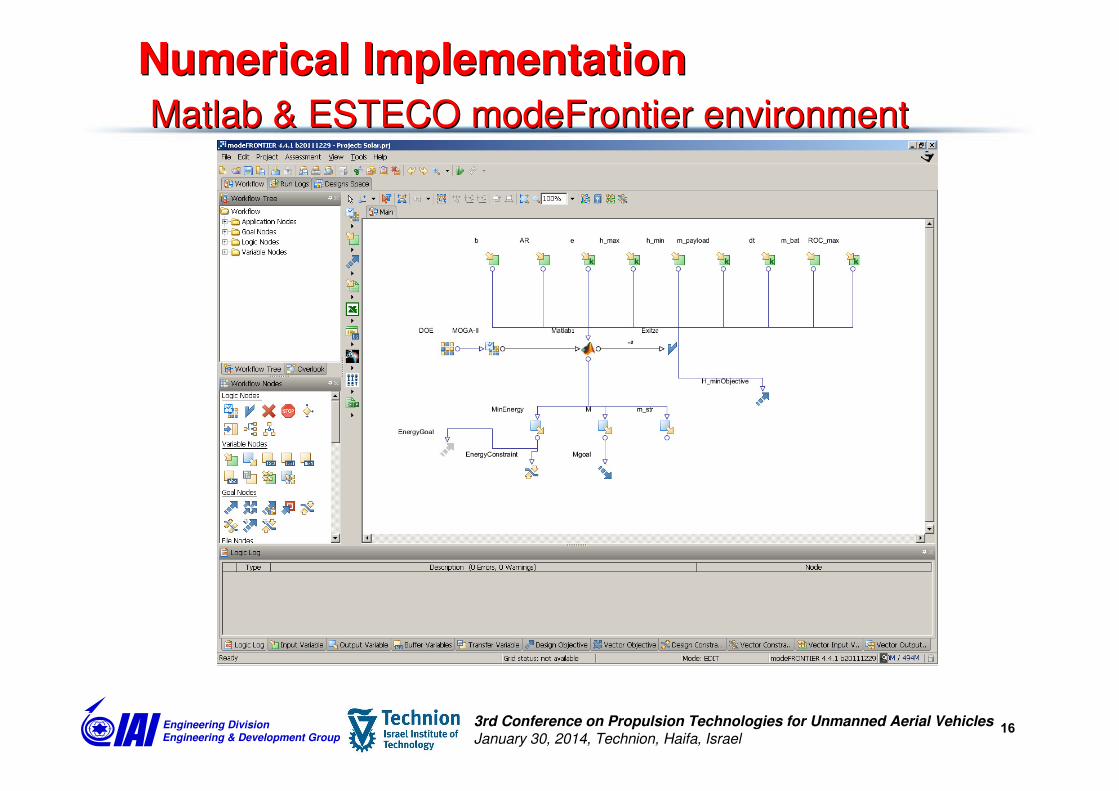
Numerical Implementation
Matlab & ESTECO modeFrontier environment
Numerical ImplementationMatlab & ESTECO modeFrontier environment

173rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Variables
Cost Function
Night Time Altitude - Maximize
Total Vehicle Mass - Minimize
Design Constraint
Energy balance
Design Case ADesign Case A
100 m10 mWing Span, b
405 Aspect Ratio, AR
70,000 ft50,000 ftMinimum Cruise Altitude
1000 kg10 kgBattery mass, mBattery
Maximum ValueMinimum ValueDesign Variable

183rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Case A, Pareto FrontDesign Case A, Pareto Front
mPayload = 2 kgmBattery,kg
b,kg (Diameter)
mBattery,kg
b,kg (Diameter)
Night Time Altitude, ft
Tota
l V
ehic
le M
ass,
kg

193rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Case A, Pareto FrontDesign Case A, Pareto Front
mPayload = 2 kg
Bat
tery
Mas
s, m
Ba
tter
y, k
g
0
100
200
300
400
500
600
700
800
900
1000
55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
mBattery,kg
b,kg (Diameter)
mBattery,kg
b,kg (Diameter)
Night Time Altitude, ft
Tota
l V
ehic
le M
ass,
kg

203rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Case A, Pareto Front DesignsDesign Case A, Pareto Front Designs
Win
g S
pan
, b
, m
15
25
35
45
55
65
75
85
95
105
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
Win
g A
spec
t R
atio
, A
R
0
5
10
15
20
25
30
35
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
Win
g A
rea,
S,
m2
0
50
100
150
200
250
300
350
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
Str
uct
ura
l M
ass,
mS
tru
ctu
re,
kg
0
100
200
300
400
500
600
700
800
900
1000
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft

213rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Technology ImprovementsDesign Case A
Technology ImprovementsDesign Case A
Two main technologies:
Solar panels efficiency
Nominal 22%, Improved: 40%
Batteries energy density
Nominal 350 W-hr/kgf, Improved: 500 W-hr/kgf

223rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Technology ImprovementsTotal Mass
Technology ImprovementsTotal Mass
0
200
400
600
800
1000
1200
1400
1600
1800
2000
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
To
tal
mas
s, k
g
η Sol. =0.22
ρ Bat. =350 W-hr/kg
η Sol. =0.4
ρ Bat. =350 W-hr/kg
η Sol. =0.22
ρ Bat. =500 W-hr/kg
η Sol. =0.4
ρ Bat. =500 W-hr/kg

233rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Technology ImprovementsBattery Mass
Technology ImprovementsBattery Mass
0
100
200
300
400
500
600
700
800
900
1000
50000 52500 55000 57500 60000 62500 65000 67500 70000
Night Time Altitude, ft
Bat
tery
mas
s, k
g
η Sol. =0.22
ρ Bat. =350 W-hr/kg
η Sol. =0.4
ρ Bat. =350 W-hr/kg
η Sol. =0.22
ρ Bat. =500 W-hr/kg
η Sol. =0.4
ρ Bat. =500 W-hr/kg

243rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Case BDesign Case B
100 m10 mWing Span, b
255 Aspect Ratio, AR
500 kg10 kgBattery mass, mBattery
Maximum ValueMinimum ValueDesign Variable
Design Variables
Cost Function
Payload Mass - Maximize
Total Vehicle Mass – Minimize
Two cases
Night time altitude 65 kft
Night time altitude 50 kft
Design Constraint
Energy balance
0
500
1000
1500
2000
2500
3000
3500
0 20 40 60 80 100 120
Payload Mass, kg
Req
uir
ed P
aylo
ad P
ow
er,
Watt

253rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
0
100
200
300
400
500
600
0 10 20 30 40 50 60 70 80 90 100 110
Payload Mass, kg
Night Altitude = 50,000 ft
Night Altitude = 65,000 ft
Bat
tery
Mas
s, m
Ba
tter
y, k
g
Design Case B, Pareto FrontDesign Case B, Pareto Front
0
200
400
600
800
1000
1200
1400
1600
1800
0 10 20 30 40 50 60 70 80 90 100 110
Payload Mass, kg
Tota
l M
ass
, kg
Night Altitude 50,000 ft
Night Altitude 65,000 ft

263rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
Design Case B, Pareto Front DesignsDesign Case B, Pareto Front Designs
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0 10 20 30 40 50 60 70 80 90 100 110
Payload Mass, kg
Pay
load M
ass
/ T
ota
l M
ass
Night Altitude = 50,000 ft
Night Altitude = 65,000 ft
0
0.1
0.2
0.3
0.4
0.5
0.6
0 10 20 30 40 50 60 70 80 90 100 110
Payload Mass, kg
(Pay
load
Mass
+ B
att
ery
Mass
) /
Tota
l M
ass
Night Altitude = 50,000 ft
Night Altitude = 65,000 ft
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 10 20 30 40 50 60 70 80 90 100 110
Payload Mass, kg
Str
uct
ura
l M
ass
/ T
ota
l M
ass
Night Altitude = 50,000 ft
Night Altitude = 65,000 ft

273rd Conference on Propulsion Technologies for Unmanned Aerial VehiclesJanuary 30, 2014, Technion, Haifa, Israel
Engineering DivisionEngineering & Development Group
ConclusionsConclusions
Solar UAV design is a MDO problem
Staying aloft ‘forever’ requires very big vehicles
Even for a very modest payload
Low feasibility for constant altitude HALE
Lower night time altitude is required
Crucial importance of improved technologies
Main effort: Energy storage weight and volume
Solar panels efficiency
Structure (Weight)





























