Embed Size (px)
Citation preview
SHANGHAI-FANUC
FANUC 外部轴添加手册
弧焊篇
编写:吴正勇 审核:张海森 上海发那科机器人有限公司
SHANGHAI-FANUC 目录
第一章:概述﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 1
第二章:硬件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2
2.1.光纤套件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2
2.2.伺服放大器﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 2
2.3.连接电缆﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 3
2.4.伺服电机﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4
2.5.抱闸单元﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 4
2.6.电池单元﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 5
第三章:硬件连接及设置﹒﹒﹒﹒﹒﹒﹒﹒ 6
3.1.光纤的连结及 FSSB的设置﹒﹒﹒﹒ 6
3.2.放大器的连接及编号的设置﹒﹒﹒﹒ 6
3.3.起始轴号的设置﹒﹒﹒﹒﹒﹒﹒﹒﹒ 7
4.4.抱闸号的设置﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 8
第四章:软件﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 9
第五章:添加案例:﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 10
5.1 单机 + 一轴变位机﹒﹒﹒﹒﹒﹒﹒﹒ 10
5.2单机 + 直线导轨+两轴 L型变位机﹒﹒ 22
5.3 双机 + 一轴定位+两轴变位机﹒﹒﹒ 44
附一:常见的故障现象﹒﹒﹒﹒﹒﹒﹒﹒﹒ 53
附二:电机型号列表﹒﹒﹒﹒﹒﹒﹒﹒﹒﹒ 54
附三:放大器型号列表﹒﹒﹒﹒﹒﹒﹒﹒﹒ 56
附四:放大器与电机匹配表﹒﹒﹒﹒﹒﹒﹒ 56
附五:电机与连接电缆匹配表﹒﹒﹒﹒﹒﹒ 57
SHANGHAI-FANUC
第一章:概述
“FANUC外部轴添加手册”是上海发那科就外部轴的添
加而编写的一本手册,该手册适用于 R30iA及以上的控制柜类
型。手册的内容包括添加外部轴整套硬件的介绍,连接及其
设置,软件的介绍、添加案例。
在使用发那科机器人之前,务必仔细阅读发那科机器人
安全手册,并在理解该内容的基础上使用机器人。在使用
“FANUC外部轴添加手册”时,操作者必须接受发那科专业
的技术培训。该手册为上海发那科内部资料,仅为内部技术
人员方便学习交流,请勿外泄
内部资料 请勿外泄
第 1 页

SHANGHAI-FANUC
第二章:硬件 在添加附添加过程中,需要追加以下硬件:光纤、伺服放
大器、连接电缆、伺服电机、抱闸单元,电池单元:
2.1光纤 光纤作为信息传输的介质,由纤芯和
包层组成,由于光纤质地脆,易断裂,所以
在使用过程中要加以注意,可以弯曲,但
禁止折弯。作为外部轴的光纤,其产品代
号如下:
1ST Servo amplifier assembly A05B-2507-J001
2ST Servo amplifier assembly A05B-2507-J002
3ST Servo amplifier assembly A05B-2507-J003
备注:光纤套件包括光纤,24V电源线,200V电源线
2.2伺服放大器 伺服放大器也叫伺服驱动器,用来控
制和驱动电机,功率驱动单元的整个过程
可以简单的说就是 AC-DC-AC的转换过程,
内部资料 请勿外泄
第 2 页

SHANGHAI-FANUC 同时具有过电压、过电流、过热、欠压的保护功能,从而实现高
精度的定位。下面以常用的放大器对电流加以说明:
2.3连接电缆
连接电缆由伺服电机电源线、编码器线和抱闸线组成,电缆的长
度有 7米,14米,20米,30米四种规格,电机与电缆的配套请
参考附五
αiSV 40 单轴放大器 电机驱动电流为 40安培
αiSV 40/80 双轴放大器 第一轴驱动电流 L为 40安培
第二轴驱动电流M为 80安培
αiSV 20/20/40 三轴放大器
第一轴驱动电流 L为 20安培
第二轴驱动电流M为 20安培
第三轴驱动电流 N为 40安培
内部资料 请勿外泄
第 3 页
SHANGHAI-FANUC
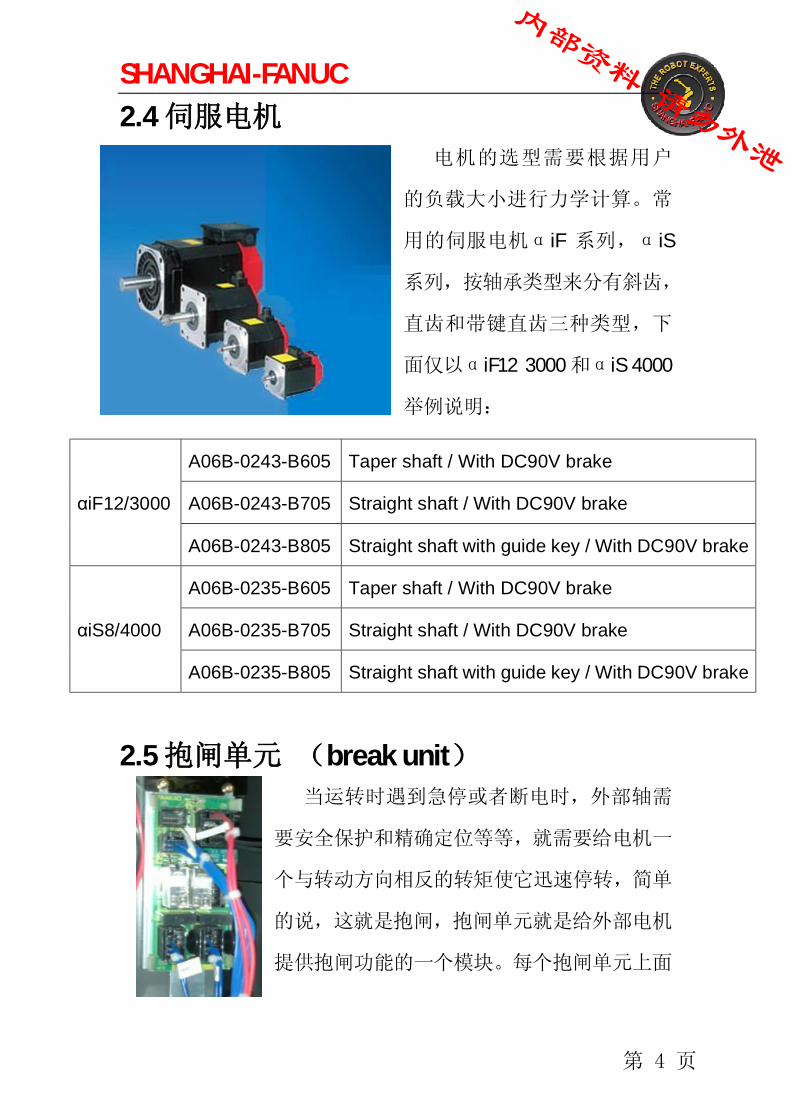
2.4伺服电机 电机的选型需要根据用户
的负载大小进行力学计算。常
用的伺服电机αiF 系列,αiS
系列,按轴承类型来分有斜齿,
直齿和带键直齿三种类型,下
面仅以αiF12 3000和αiS 4000
举例说明:
2.5抱闸单元 (break unit) 当运转时遇到急停或者断电时,外部轴需
要安全保护和精确定位等等,就需要给电机一
个与转动方向相反的转矩使它迅速停转,简单
的说,这就是抱闸,抱闸单元就是给外部电机
提供抱闸功能的一个模块。每个抱闸单元上面
αiF12/3000
A06B-0243-B605 Taper shaft / With DC90V brake
A06B-0243-B705 Straight shaft / With DC90V brake
A06B-0243-B805 Straight shaft with guide key / With DC90V brake
αiS8/4000
A06B-0235-B605 Taper shaft / With DC90V brake
A06B-0235-B705 Straight shaft / With DC90V brake
A06B-0235-B805 Straight shaft with guide key / With DC90V brake
内部资料 请勿外泄
第 4 页

SHANGHAI-FANUC 有两个抱闸号,每一个抱闸号有两个抱闸口,每一个抱闸口可以
控制一个电机。其产品代号如下:
break unit A05B-2507-J401
2.6电池单元 (Battery unit)
电池单元是给外部轴编码器
供电的一种装置,电池电压为
6V。标准的变位机(电机与减
速机一体,机械装置里已包括
该装置)不需要该装置。其产
品代号如下:
Battery unit A05B-2507-J460
内部资料 请勿外泄
第 5 页
SHANGHAI-FANUC
第三章:硬件连接及设置 3.1光纤的连结及 FSSB的设置 本节就追加外部轴时所需的“FSSB 路径”的设定进行描述;
在主板的轴卡※1上有两个光纤口,COP10A-1和 COP10A-2,光纤
以轴卡的两个光纤口为起点,依次连入机器人六轴放大器,外部
轴放大器。在连接过程中,遵循“B进 A出”的规则,即光纤从
放大器的 COP10B进,从放大器的 COP10A出。连接在 A-1上的
机器人及外部轴,其 FSSB为 1,连接在A-2上的机器人及外部轴,
其 FSSB 为 2 (※1:轴卡有八轴,十二轴,十六轴,二十四轴,
四种规格)
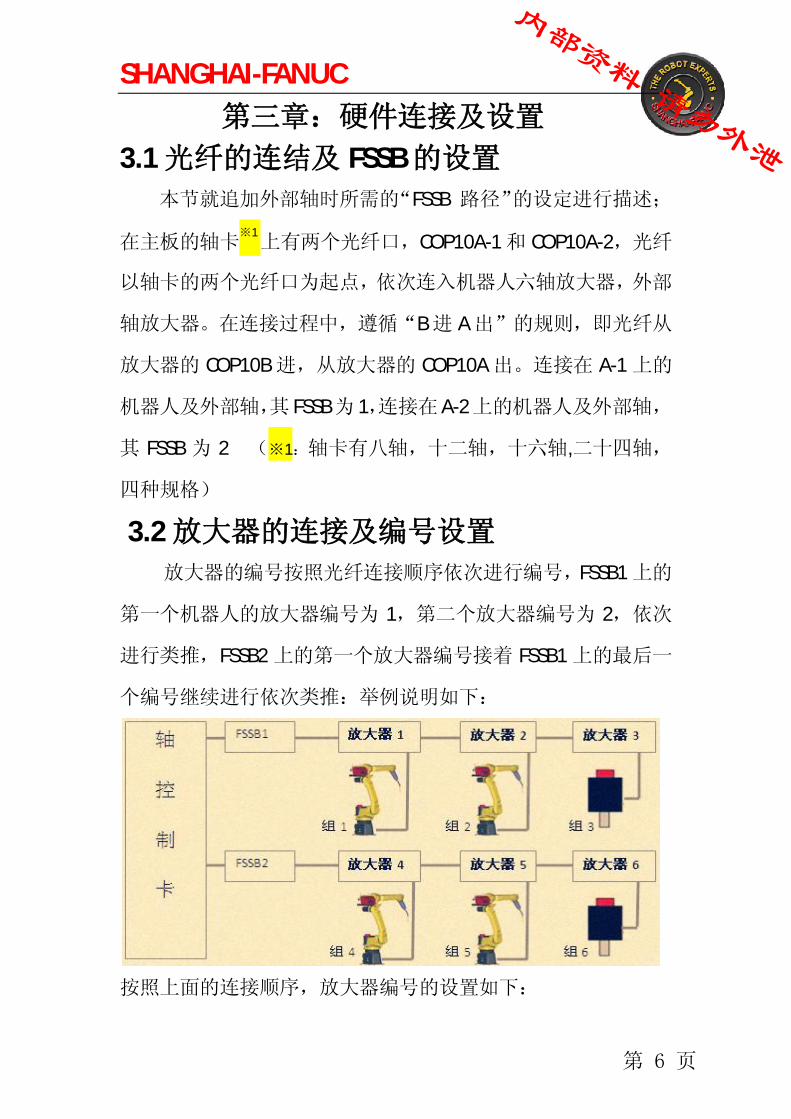
3.2放大器的连接及编号设置
放大器的编号按照光纤连接顺序依次进行编号,FSSB1上的
第一个机器人的放大器编号为 1,第二个放大器编号为 2,依次
进行类推,FSSB2上的第一个放大器编号接着 FSSB1上的最后一
个编号继续进行依次类推:举例说明如下:
按照上面的连接顺序,放大器编号的设置如下:
内部资料 请勿外泄
第 6 页
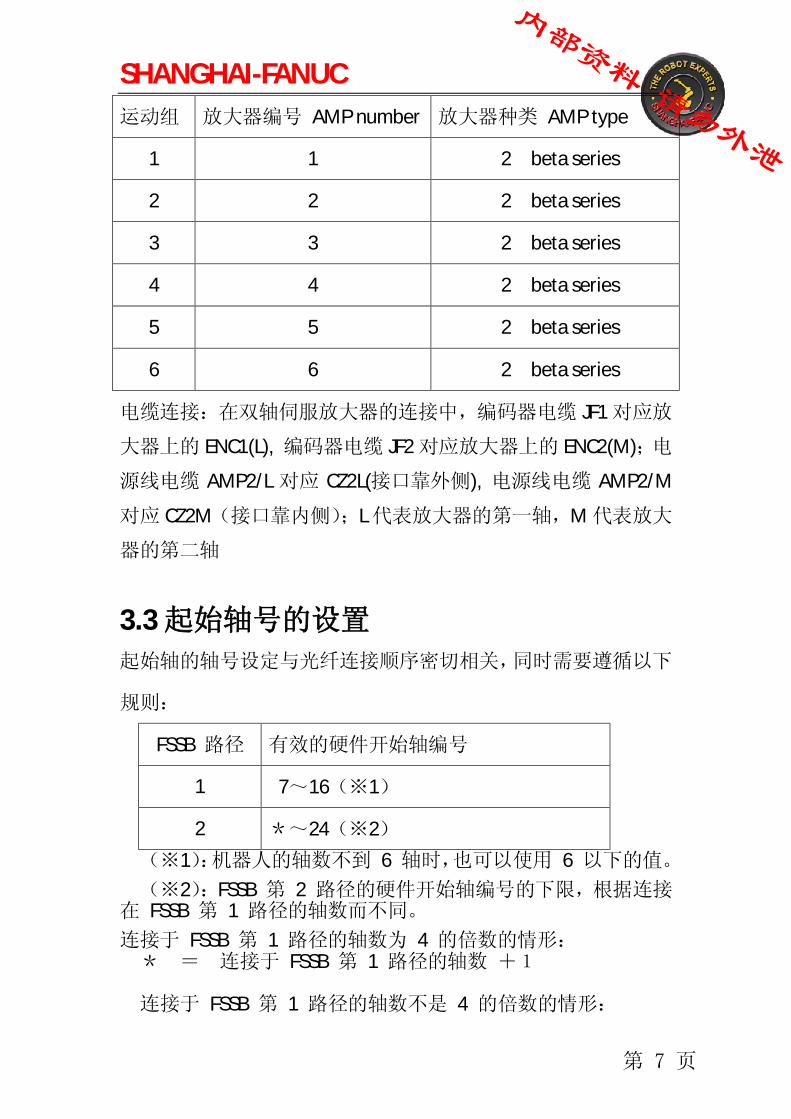
SHANGHAI-FANUC 运动组 放大器编号 AMP number 放大器种类 AMP type
1 1 2 beta series
2 2 2 beta series
3 3 2 beta series
4 4 2 beta series
5 5 2 beta series
6 6 2 beta series
电缆连接:在双轴伺服放大器的连接中,编码器电缆 JF1对应放
大器上的 ENC1(L), 编码器电缆 JF2对应放大器上的 ENC2(M);电
源线电缆 AMP2/L 对应 CZ2L(接口靠外侧), 电源线电缆 AMP2/M
对应 CZ2M(接口靠内侧);L代表放大器的第一轴,M代表放大
器的第二轴
3.3起始轴号的设置 起始轴的轴号设定与光纤连接顺序密切相关,同时需要遵循以下
规则:
FSSB 路径 有效的硬件开始轴编号
1 7~16(※1)
2 *~24(※2)
(※1):机器人的轴数不到 6 轴时,也可以使用 6 以下的值。
(※2):FSSB 第 2 路径的硬件开始轴编号的下限,根据连接在 FSSB 第 1 路径的轴数而不同。
连接于 FSSB 第 1 路径的轴数为 4 的倍数的情形: * = 连接于 FSSB 第 1 路径的轴数 +1 连接于 FSSB 第 1 路径的轴数不是 4 的倍数的情形:
内部资料 请勿外泄
第 7 页

SHANGHAI-FANUC * = 比连接于 FSSB 第 1 路径的轴数大,且最靠近的4的
倍+1 。
按照以上的连接顺序,轴开始号设置如下:
运动组 FSSB 路径 硬件开始轴编号 FSSB1总轴数
1 1 1 无需设定
2 1 7 无需设定
3 1 13 无需设定
4 2 17 13
5 2 18 13
3.4抱闸号(break unit)的设置 第一台机器人六轴放大器的抱闸号为 1,其外加的抱闸单元分别为 2号,3号 第二台机器人六轴放大器的抱闸号为 5,其外加的抱闸单元分别为 6号,7号,抱闸号的设置取决于外部轴抱闸线接入的是哪一个口,如图所示
1
2
3 7
6
5
1号机器人 2号机器人
内部资料 请勿外泄
第 8 页

SHANGHAI-FANUC
第四章:软件 外部的附加轴其用途不一样,所安装的软件也不一样,下面
就软件代码进行说明:
序号 软件名称 软件代码 用途说明
1 Independent Auxiliary Axis A05B-2500-H895 用于伺服旋转变位,不能
与机器人协调
2 Extended Axes Control
A05B-2500-J518
用于直线导轨
3 Basic Positioner A05B-2500-H896 用于伺服旋转变位,能与
机器人协调
4 ARC Positioner A05B-2500-H871 500KG 两轴标准变位机
5 300KG One-axis Positioner A05B-2500-H879 300KG 一轴标准变位机
6 500KG One-axis Positioner A05B-2500-H875 500KG 一轴标准变位机
7 1000KG One-axis Positioner A05B-2500-H880 1000KG 一轴标准变位
机
8 1500KG One-axis Positioner A05B-2500-H876 1500KG 一轴标准变位
机
9 Multi-Group Motion A05B-2500-J601 多组动作控制,必须安装
10 Coord Motion Package A05B-2500-J686 协调控制,可选配
11 Multi-robot control A05B-2500-J605 多机器人控制
内部资料 请勿外泄
第 9 页
SHANGHAI-FANUC
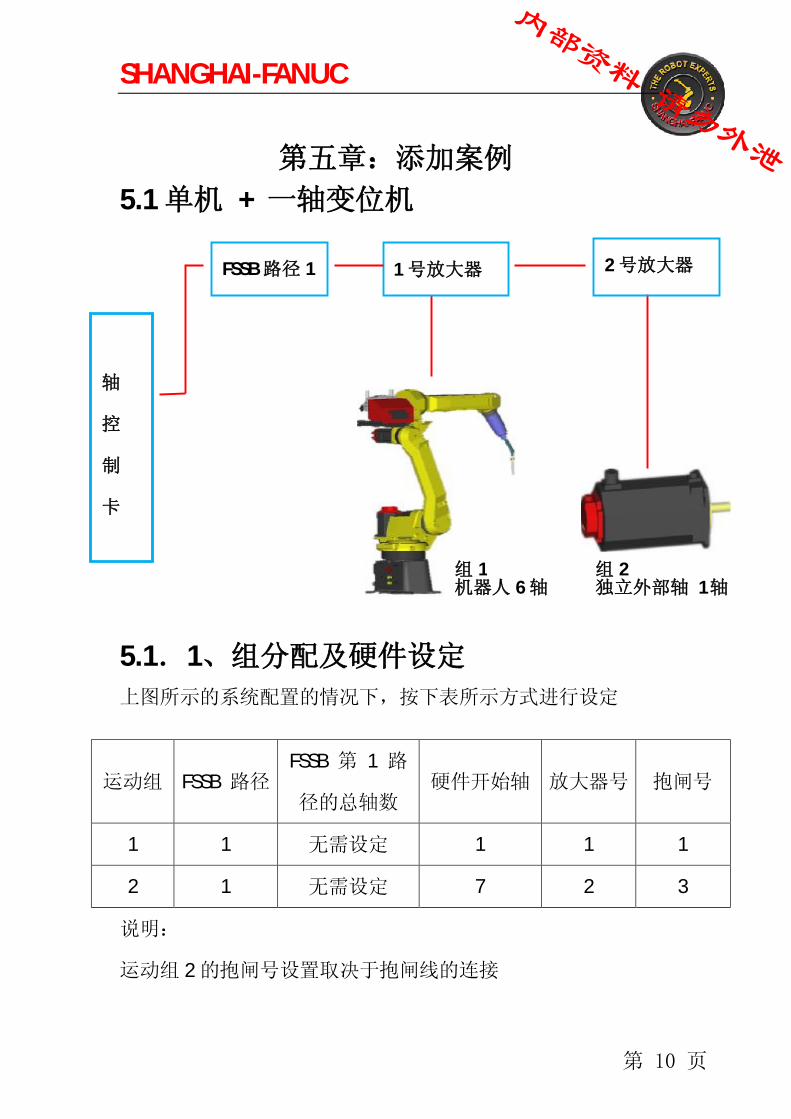
第五章:添加案例 5.1单机 + 一轴变位机
5.1.1、组分配及硬件设定 上图所示的系统配置的情况下,按下表所示方式进行设定
说明:
运动组 2的抱闸号设置取决于抱闸线的连接
运动组 FSSB 路径 FSSB 第 1 路
径的总轴数 硬件开始轴 放大器号 抱闸号
1 1 无需设定 1 1 1
2 1 无需设定 7 2 3
FSSB路径 1 1号放大器 2号放大器
组 1 机器人 6轴
组 2 独立外部轴 1轴
轴
控
制
卡
内部资料 请勿外泄
第 10 页
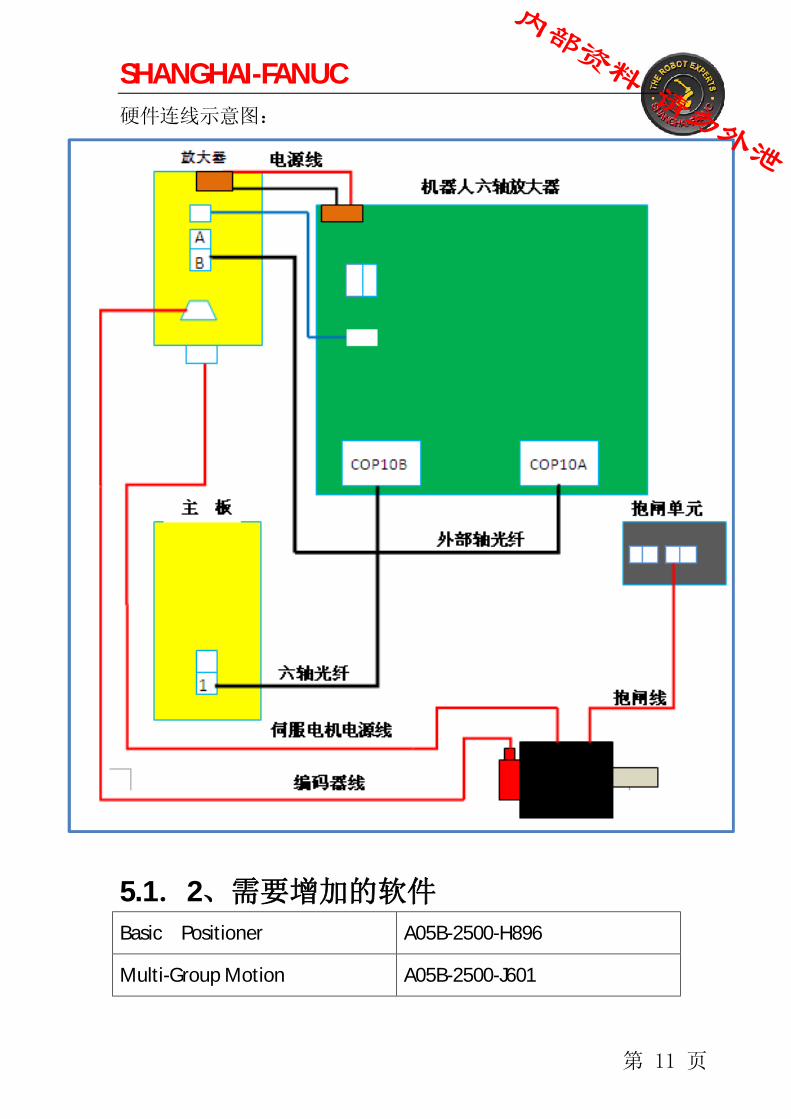
SHANGHAI-FANUC 硬件连线示意图:
5.1.2、需要增加的软件 Basic Positioner A05B-2500-H896
Multi-Group Motion A05B-2500-J601
内部资料 请勿外泄
第 11 页
SHANGHAI-FANUC
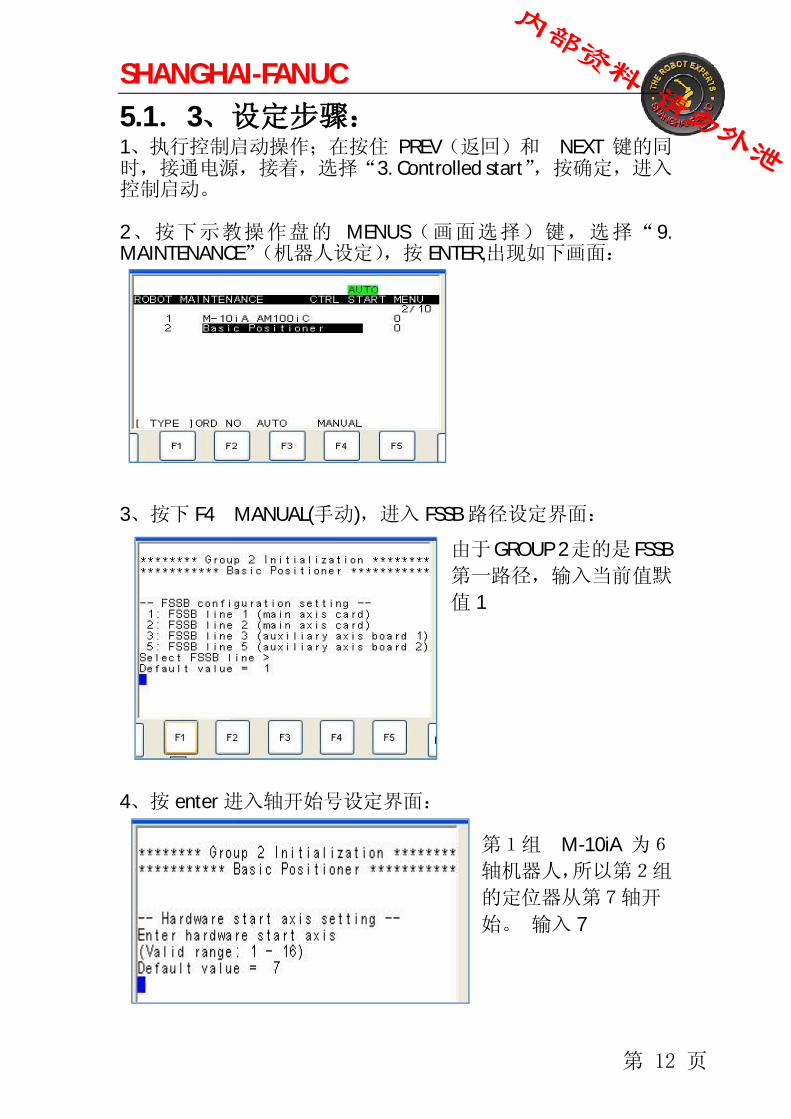
5.1.3、设定步骤: 1、执行控制启动操作;在按住 PREV(返回)和 NEXT 键的同时,接通电源,接着,选择“3. Controlled start”,按确定,进入控制启动。 2、按下示教操作盘的 MENUS(画面选择)键,选择“9. MAINTENANCE”(机器人设定),按 ENTER,出现如下画面:
3、按下 F4 MANUAL(手动),进入 FSSB路径设定界面:
由于GROUP 2走的是 FSSB第一路径,输入当前值默
值 1
4、按 enter进入轴开始号设定界面:
第1组 M-10iA 为6轴机器人,所以第2组
的定位器从第7轴开
始。 输入 7
内部资料 请勿外泄
第 12 页
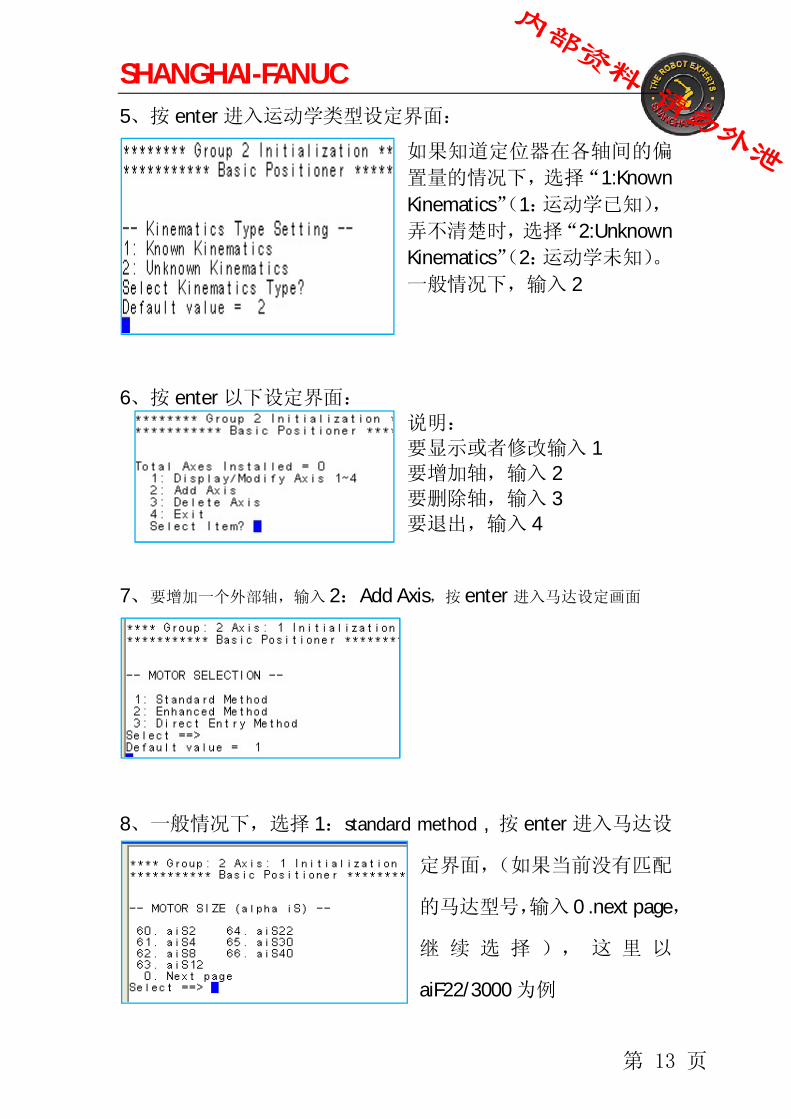
SHANGHAI-FANUC 5、按 enter进入运动学类型设定界面:
如果知道定位器在各轴间的偏
置量的情况下,选择“1:Known Kinematics”(1:运动学已知),弄不清楚时,选择“2:Unknown Kinematics”(2:运动学未知)。一般情况下,输入 2
6、按 enter以下设定界面:
说明: 要显示或者修改输入 1 要增加轴,输入 2 要删除轴,输入 3 要退出,输入 4
7、要增加一个外部轴,输入 2:Add Axis,按 enter 进入马达设定画面
8、一般情况下,选择 1:standard method , 按 enter进入马达设
定界面,(如果当前没有匹配
的马达型号,输入 0 .next page,
继 续 选 择 ), 这 里 以
aiF22/3000为例
内部资料 请勿外泄
第 13 页
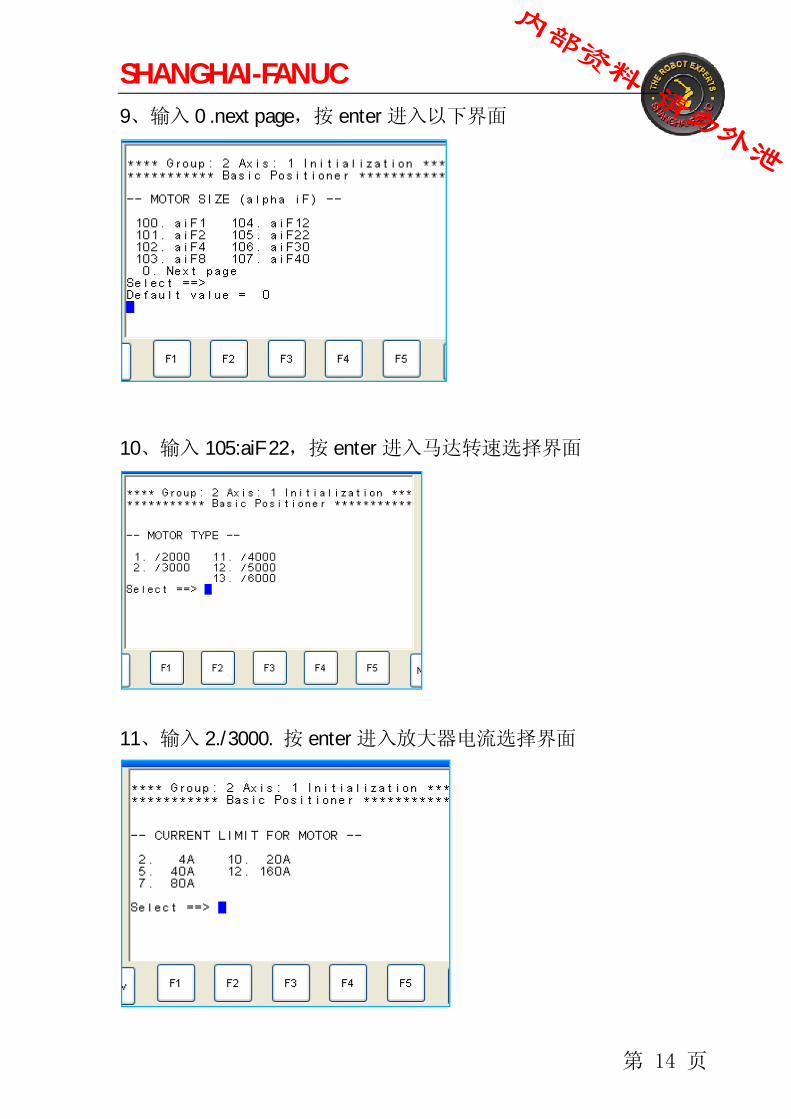
SHANGHAI-FANUC 9、输入 0 .next page,按 enter进入以下界面
10、输入 105:aiF 22,按 enter进入马达转速选择界面
11、输入 2./3000. 按 enter进入放大器电流选择界面
内部资料 请勿外泄
第 14 页
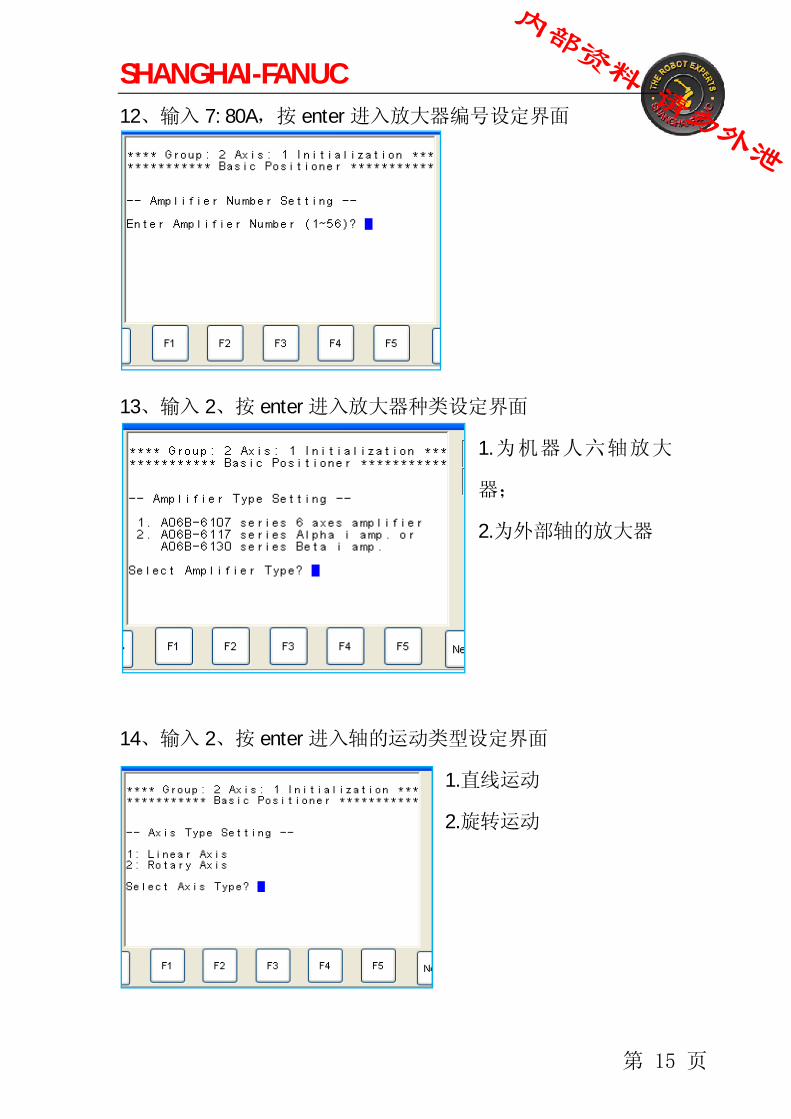
SHANGHAI-FANUC 12、输入 7: 80A,按 enter进入放大器编号设定界面
13、输入 2、按 enter进入放大器种类设定界面
1.为机器人六轴放大
器;
2.为外部轴的放大器
14、输入 2、按 enter进入轴的运动类型设定界面
1.直线运动
2.旋转运动
内部资料 请勿外泄
第 15 页
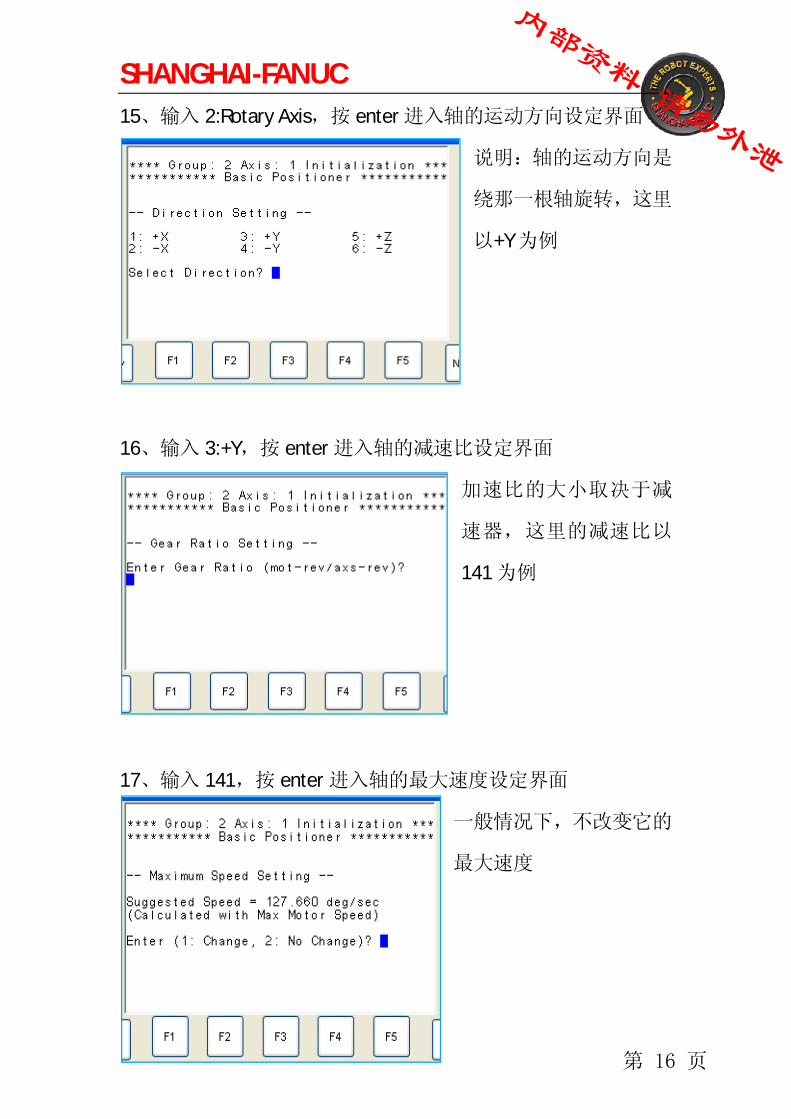
SHANGHAI-FANUC 15、输入 2:Rotary Axis,按 enter进入轴的运动方向设定界面
说明:轴的运动方向是
绕那一根轴旋转,这里
以+Y为例
16、输入 3:+Y,按 enter进入轴的减速比设定界面
加速比的大小取决于减
速器,这里的减速比以
141为例
17、输入 141,按 enter进入轴的最大速度设定界面
一般情况下,不改变它的
最大速度
内部资料 请勿外泄
第 16 页

SHANGHAI-FANUC 18、输入 2: No Change,按 enter进入以下界面
19、输入 1: TRUE,按 enter进入轴上限设定界面
以 360度为例
20、输入 360,按 enter进入轴下限设定界面
以-360度为例
内部资料 请勿外泄
第 17 页
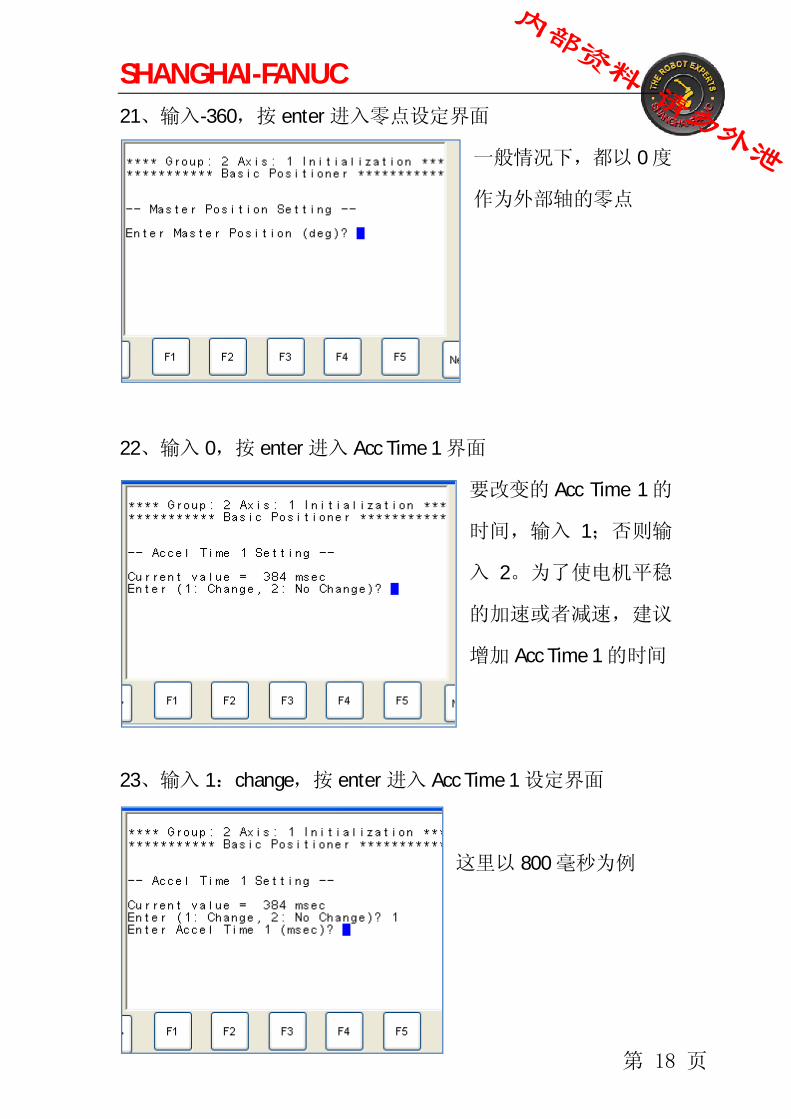
SHANGHAI-FANUC 21、输入-360,按 enter进入零点设定界面
一般情况下,都以 0度
作为外部轴的零点
22、输入 0,按 enter进入 Acc Time 1界面
要改变的 Acc Time 1的
时间,输入 1;否则输
入 2。为了使电机平稳
的加速或者减速,建议
增加 Acc Time 1的时间
23、输入 1:change,按 enter进入 Acc Time 1设定界面
这里以 800毫秒为例
内部资料 请勿外泄
第 18 页
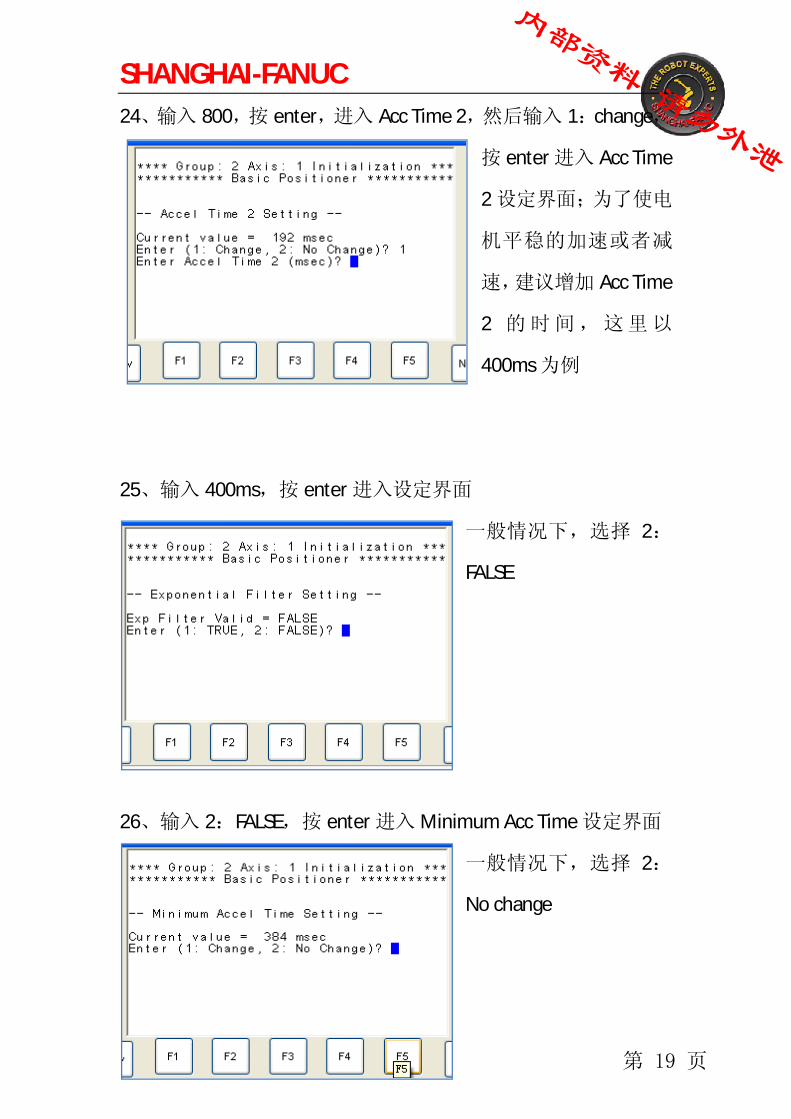
SHANGHAI-FANUC 24、输入 800,按 enter,进入 Acc Time 2,然后输入 1:change,
按 enter进入 Acc Time
2设定界面;为了使电
机平稳的加速或者减
速,建议增加 Acc Time
2 的时间,这里以
400ms为例
25、输入 400ms,按 enter进入设定界面
一般情况下,选择 2:
FALSE
26、输入 2:FALSE,按 enter进入Minimum Acc Time设定界面
一般情况下,选择 2:
No change
内部资料 请勿外泄
第 19 页
SHANGHAI-FANUC
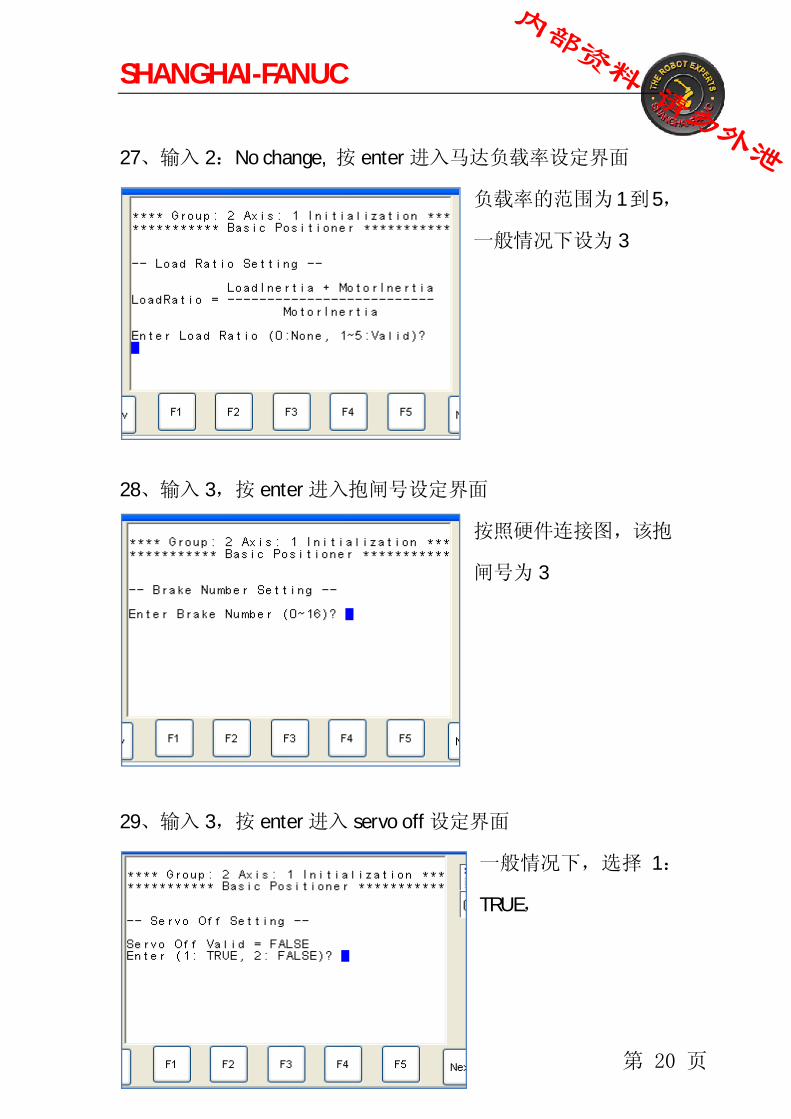
27、输入 2:No change, 按 enter进入马达负载率设定界面
负载率的范围为1到5,
一般情况下设为 3
28、输入 3,按 enter进入抱闸号设定界面
按照硬件连接图,该抱
闸号为 3
29、输入 3,按 enter进入 servo off设定界面
一般情况下,选择 1:
TRUE,
内部资料 请勿外泄
第 20 页
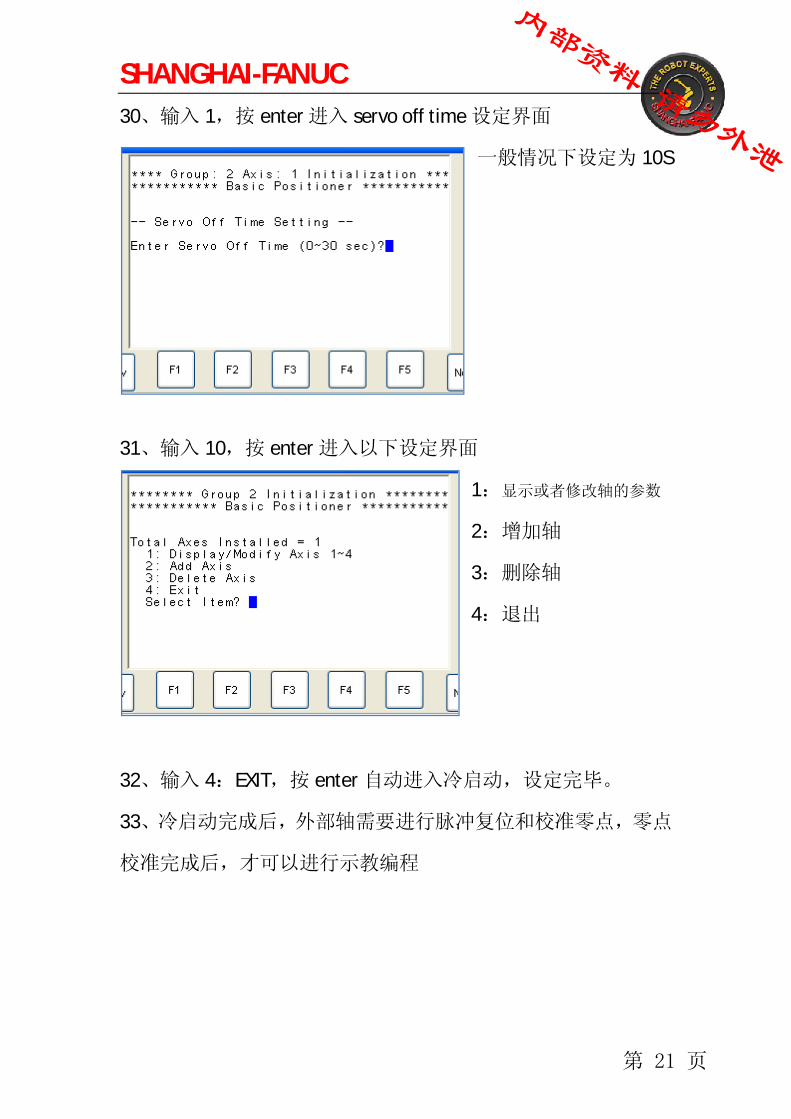
SHANGHAI-FANUC 30、输入 1,按 enter进入 servo off time设定界面
一般情况下设定为 10S
31、输入 10,按 enter进入以下设定界面
1:显示或者修改轴的参数
2:增加轴
3:删除轴
4:退出
32、输入 4:EXIT,按 enter自动进入冷启动,设定完毕。
33、冷启动完成后,外部轴需要进行脉冲复位和校准零点,零点
校准完成后,才可以进行示教编程
内部资料 请勿外泄
第 21 页
SHANGHAI-FANUC
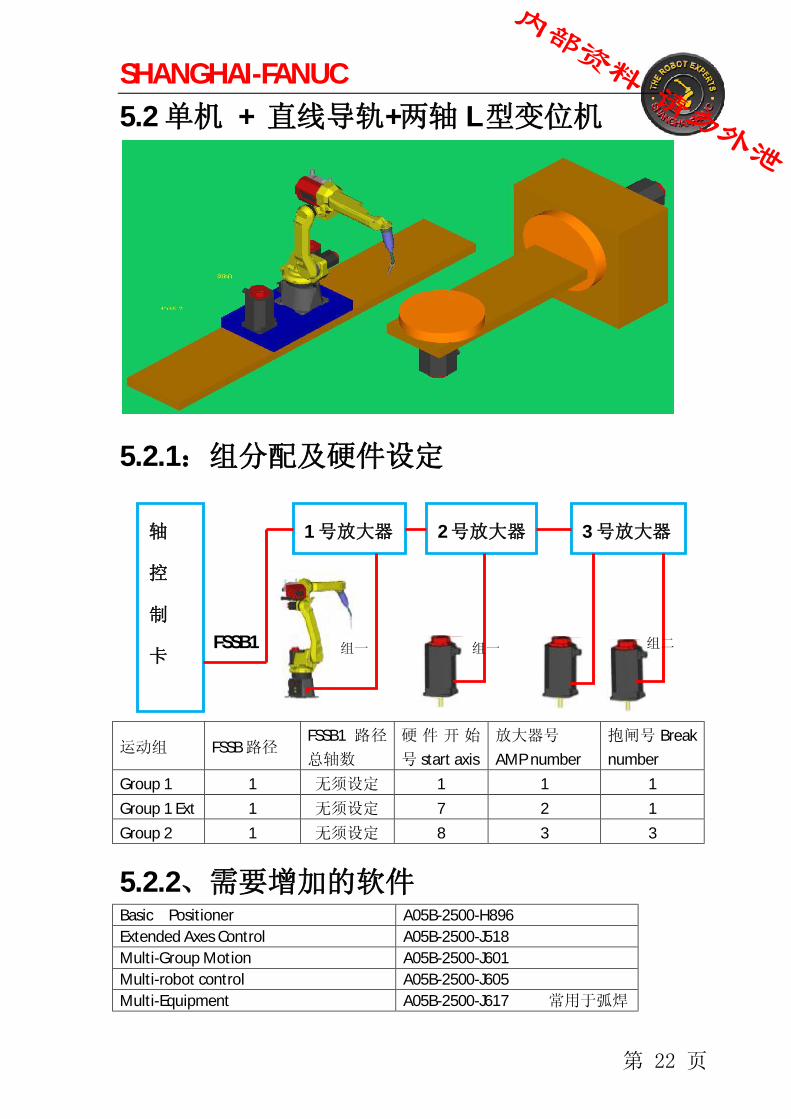
5.2单机 + 直线导轨+两轴 L型变位机
5.2.1:组分配及硬件设定
运动组 FSSB路径 FSSB1 路径
总轴数
硬 件 开 始
号 start axis
放大器号
AMP number
抱闸号 Break
number
Group 1 1 无须设定 1 1 1
Group 1 Ext 1 无须设定 7 2 1
Group 2 1 无须设定 8 3 3
5.2.2、需要增加的软件 Basic Positioner A05B-2500-H896 Extended Axes Control A05B-2500-J518 Multi-Group Motion A05B-2500-J601 Multi-robot control A05B-2500-J605 Multi-Equipment A05B-2500-J617 常用于弧焊
轴
控
制
卡
1号放大器 3号放大器 2号放大器
FSSB1 组一 组一 组二
内部资料 请勿外泄
第 22 页
SHANGHAI-FANUC
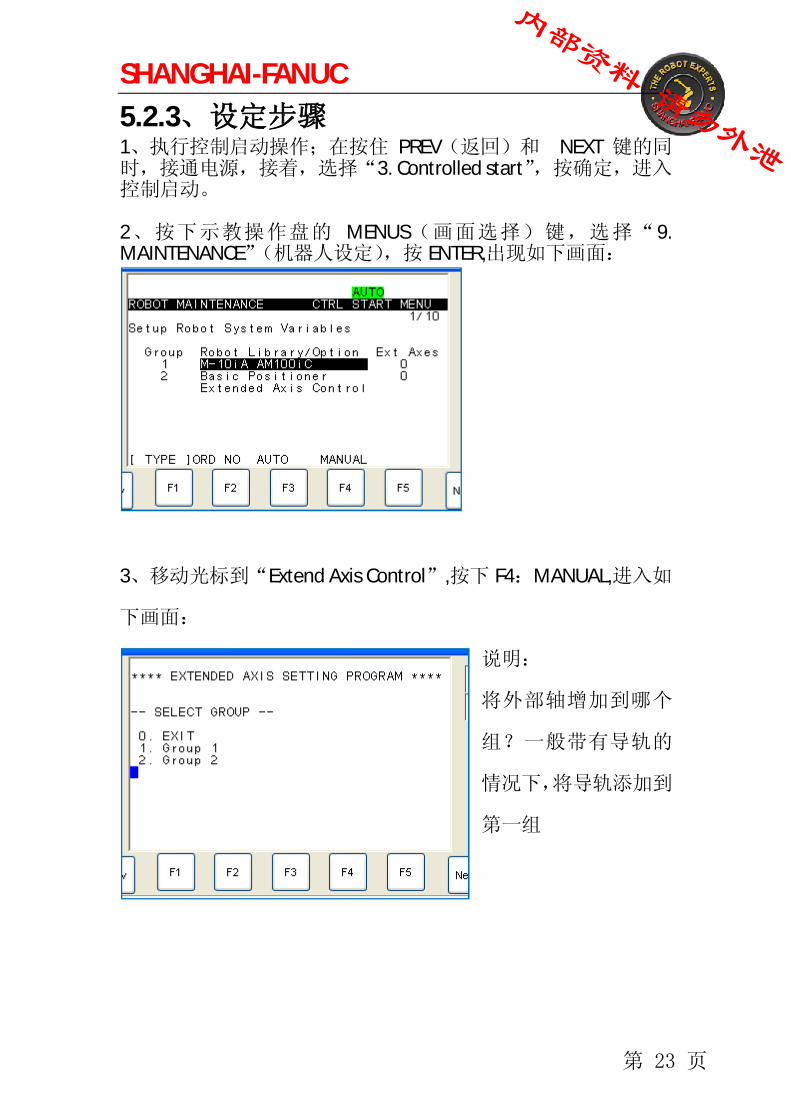
5.2.3、设定步骤 1、执行控制启动操作;在按住 PREV(返回)和 NEXT 键的同时,接通电源,接着,选择“3. Controlled start”,按确定,进入控制启动。 2、按下示教操作盘的 MENUS(画面选择)键,选择“9. MAINTENANCE”(机器人设定),按 ENTER,出现如下画面:
3、移动光标到“Extend Axis Control”,按下 F4:MANUAL,进入如
下画面:
说明:
将外部轴增加到哪个
组?一般带有导轨的
情况下,将导轨添加到
第一组
内部资料 请勿外泄
第 23 页
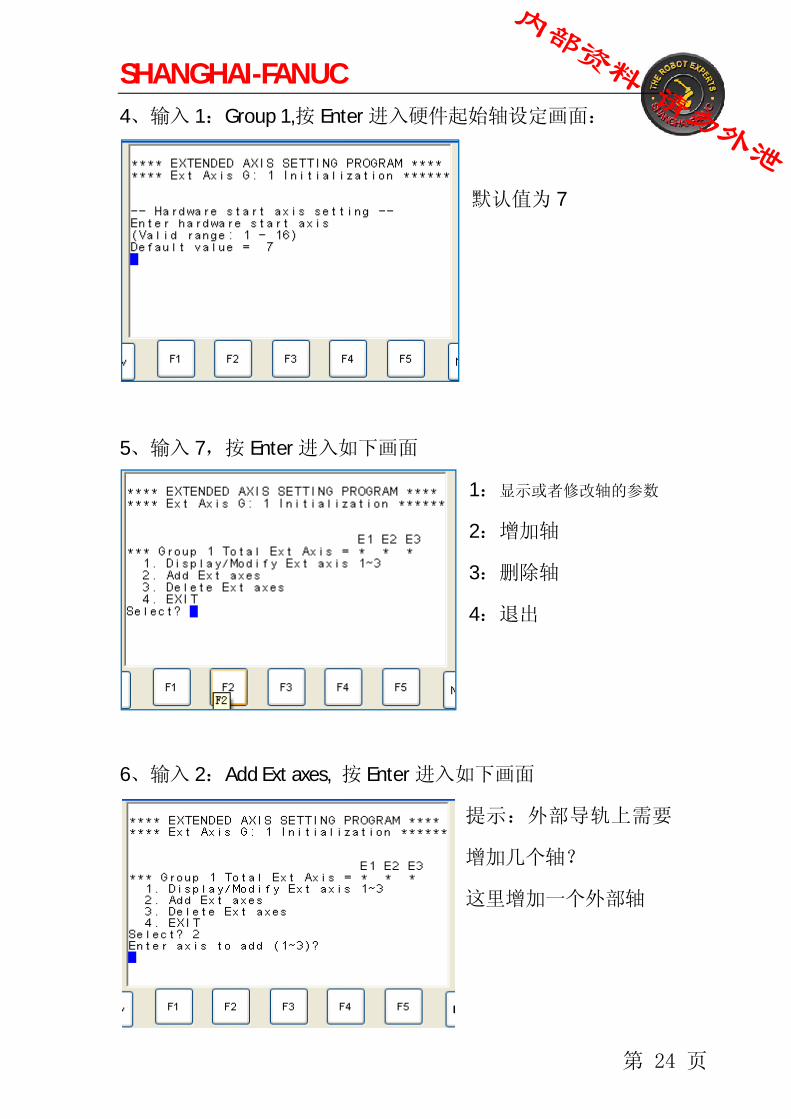
SHANGHAI-FANUC 4、输入 1:Group 1,按 Enter进入硬件起始轴设定画面:
默认值为 7
5、输入 7,按 Enter进入如下画面
1:显示或者修改轴的参数
2:增加轴
3:删除轴
4:退出
6、输入 2:Add Ext axes, 按 Enter进入如下画面
提示:外部导轨上需要
增加几个轴?
这里增加一个外部轴
内部资料 请勿外泄
第 24 页
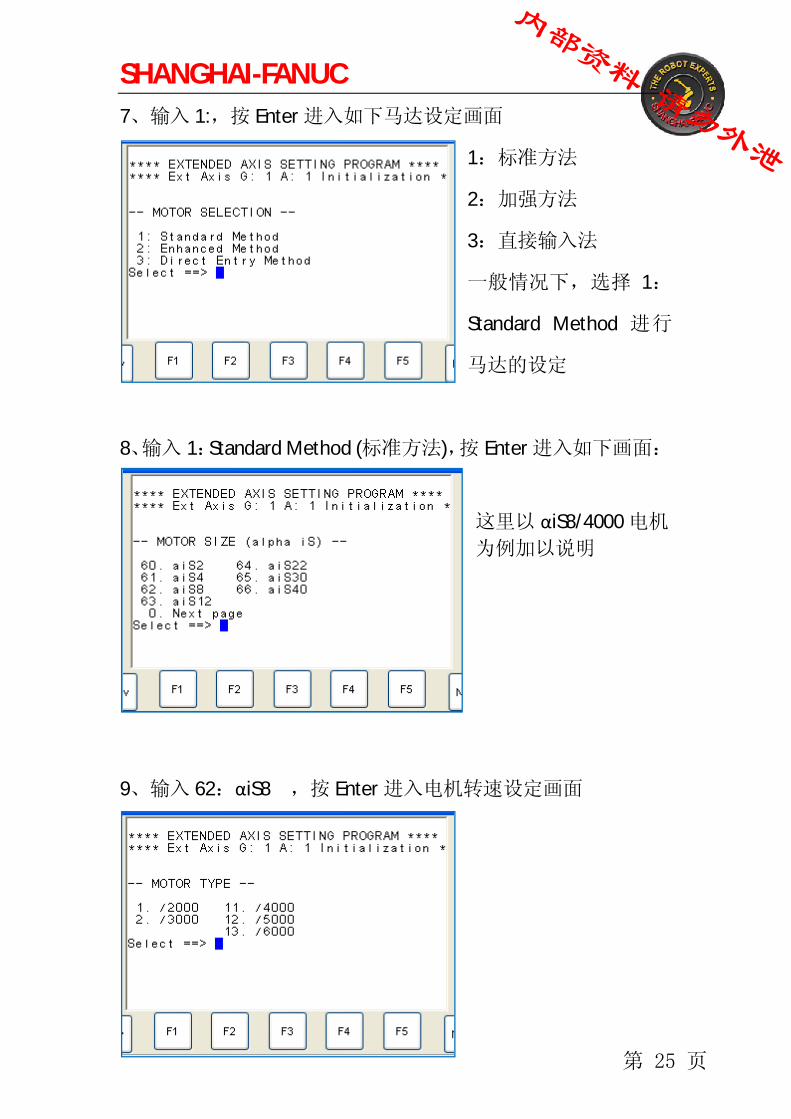
SHANGHAI-FANUC 7、输入 1:,按 Enter进入如下马达设定画面
1:标准方法
2:加强方法
3:直接输入法
一般情况下,选择 1:
Standard Method 进行
马达的设定
8、输入 1:Standard Method (标准方法),按 Enter进入如下画面: 这里以 αiS8/4000电机为例加以说明
9、输入 62:αiS8 ,按 Enter进入电机转速设定画面
内部资料 请勿外泄
第 25 页
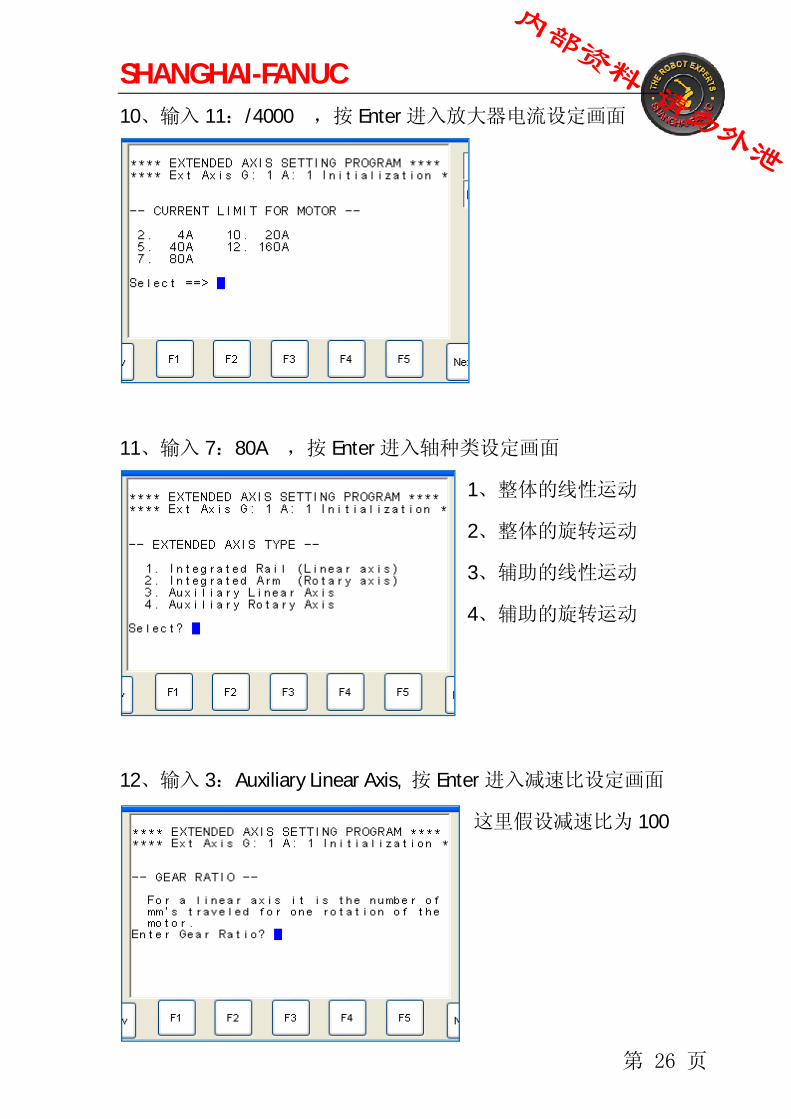
SHANGHAI-FANUC 10、输入 11:/4000 ,按 Enter进入放大器电流设定画面
11、输入 7:80A ,按 Enter进入轴种类设定画面
1、整体的线性运动
2、整体的旋转运动
3、辅助的线性运动
4、辅助的旋转运动
12、输入 3:Auxiliary Linear Axis, 按 Enter进入减速比设定画面
这里假设减速比为 100
内部资料 请勿外泄
第 26 页
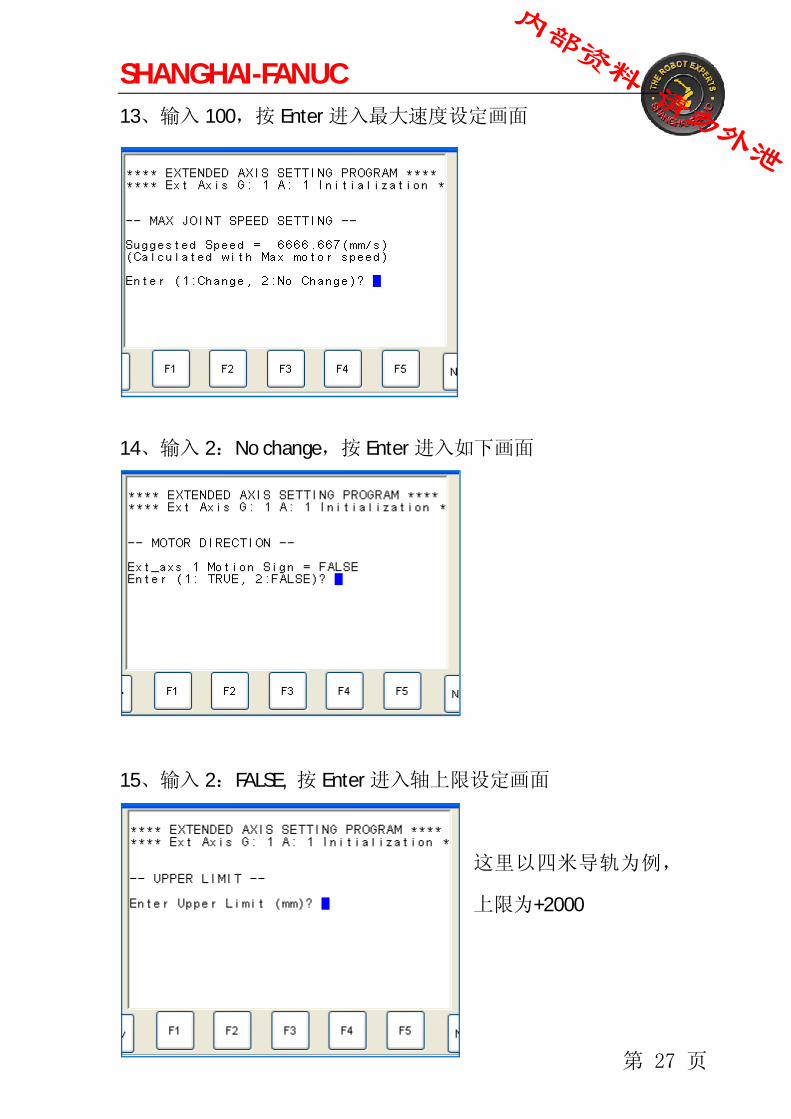
SHANGHAI-FANUC 13、输入 100,按 Enter进入最大速度设定画面
14、输入 2:No change,按 Enter进入如下画面
15、输入 2:FALSE, 按 Enter进入轴上限设定画面
这里以四米导轨为例,
上限为+2000
内部资料 请勿外泄
第 27 页
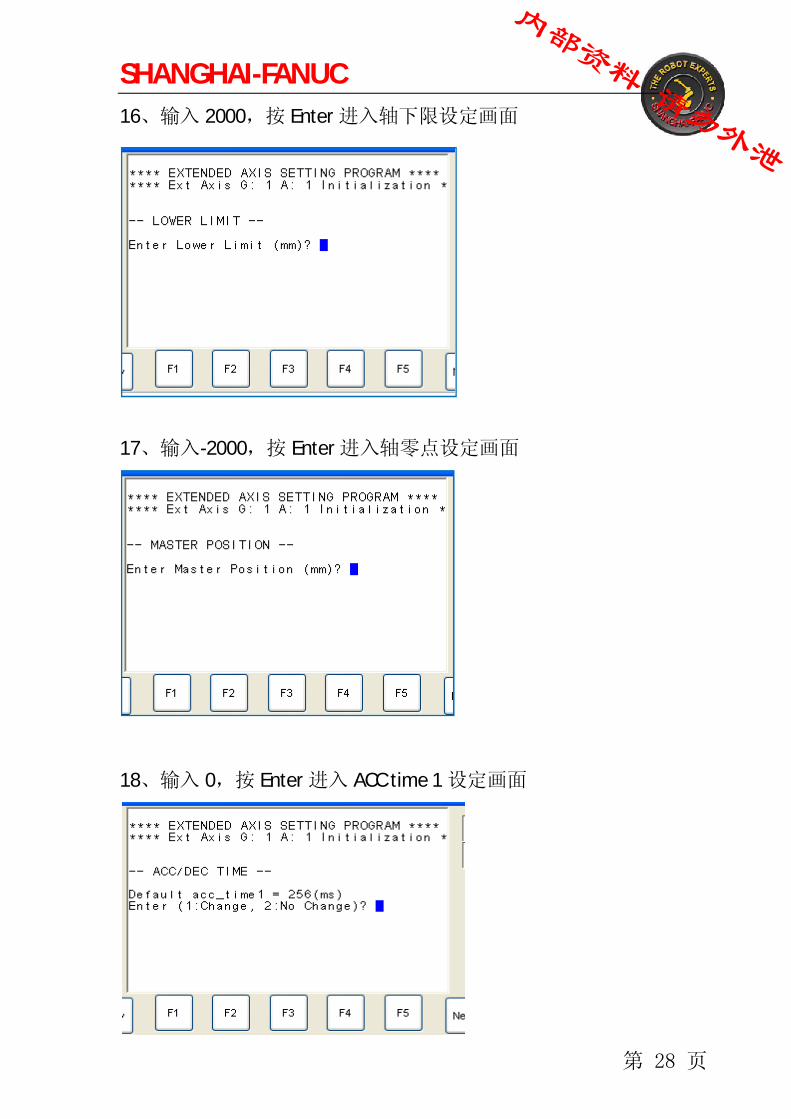
SHANGHAI-FANUC 16、输入 2000,按 Enter进入轴下限设定画面
17、输入-2000,按 Enter进入轴零点设定画面
18、输入 0,按 Enter进入 ACC time 1设定画面
内部资料 请勿外泄
第 28 页
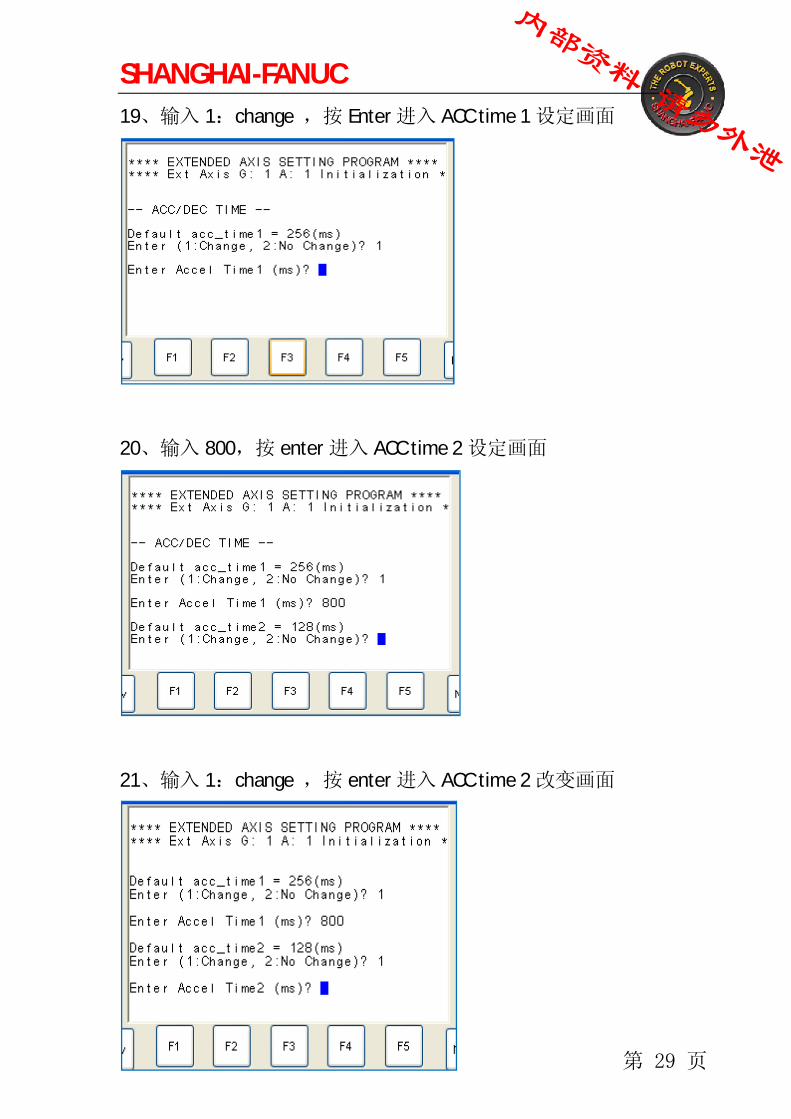
SHANGHAI-FANUC 19、输入 1:change ,按 Enter进入 ACC time 1设定画面
20、输入 800,按 enter进入 ACC time 2设定画面
21、输入 1:change ,按 enter进入 ACC time 2改变画面
内部资料 请勿外泄
第 29 页
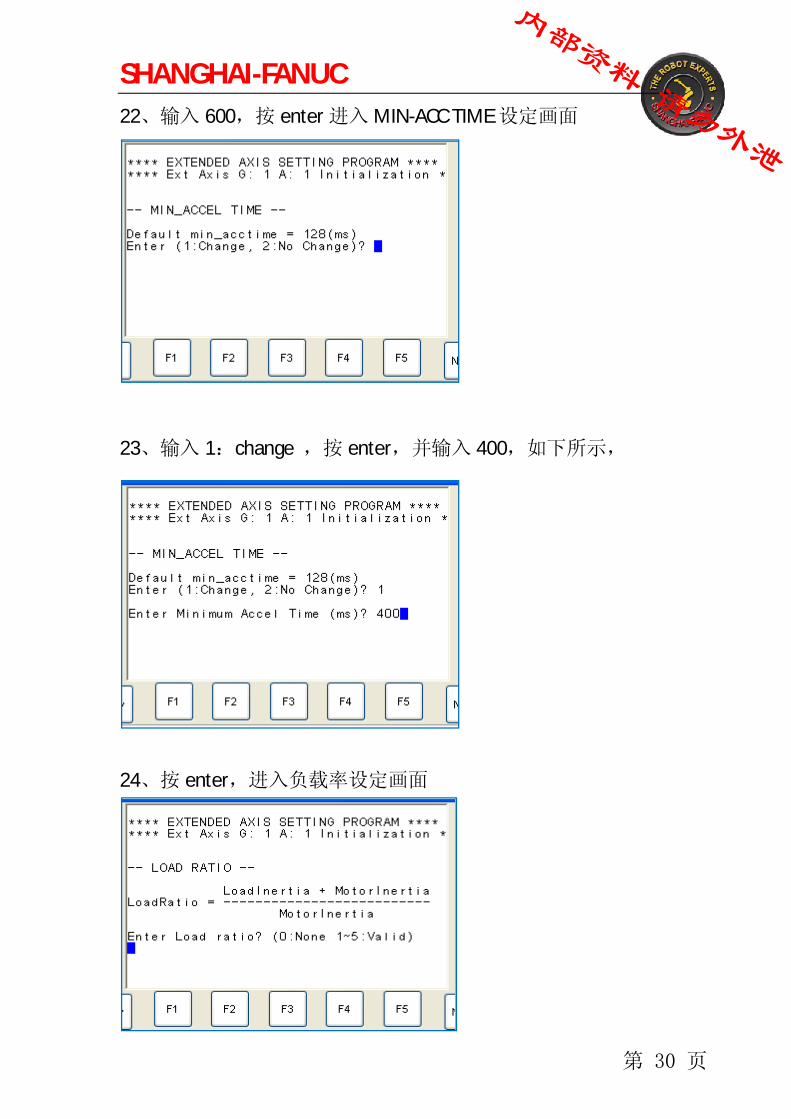
SHANGHAI-FANUC 22、输入 600,按 enter进入MIN-ACC TIME设定画面
23、输入 1:change ,按 enter,并输入 400,如下所示,
24、按 enter,进入负载率设定画面
内部资料 请勿外泄
第 30 页
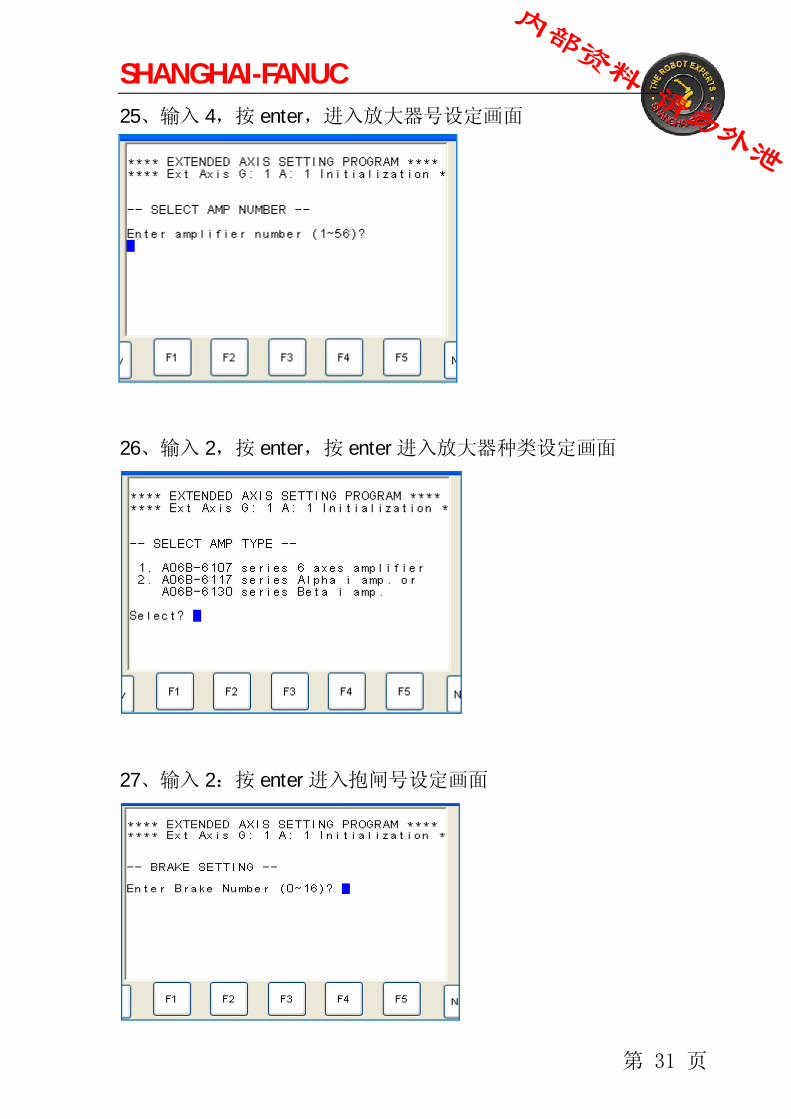
SHANGHAI-FANUC 25、输入 4,按 enter,进入放大器号设定画面
26、输入 2,按 enter,按 enter进入放大器种类设定画面
27、输入 2:按 enter进入抱闸号设定画面
内部资料 请勿外泄
第 31 页
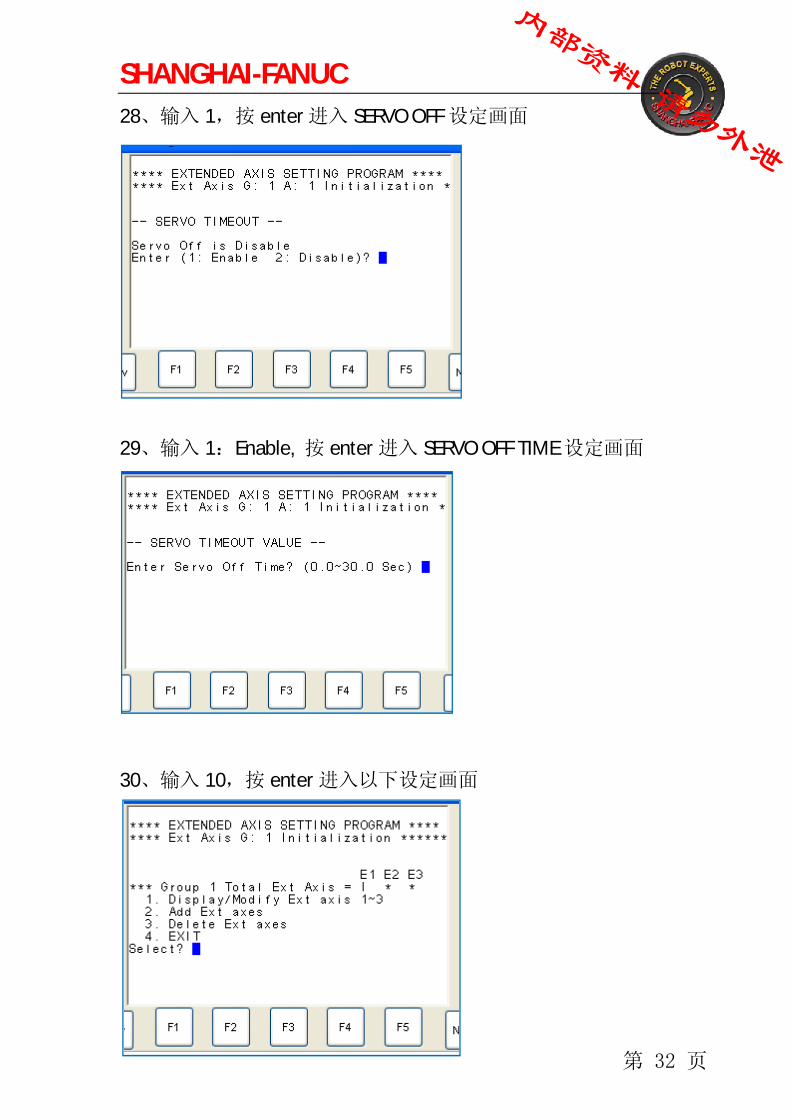
SHANGHAI-FANUC 28、输入 1,按 enter进入 SERVO OFF设定画面
29、输入 1:Enable, 按 enter进入 SERVO OFF TIME设定画面
30、输入 10,按 enter进入以下设定画面
内部资料 请勿外泄
第 32 页
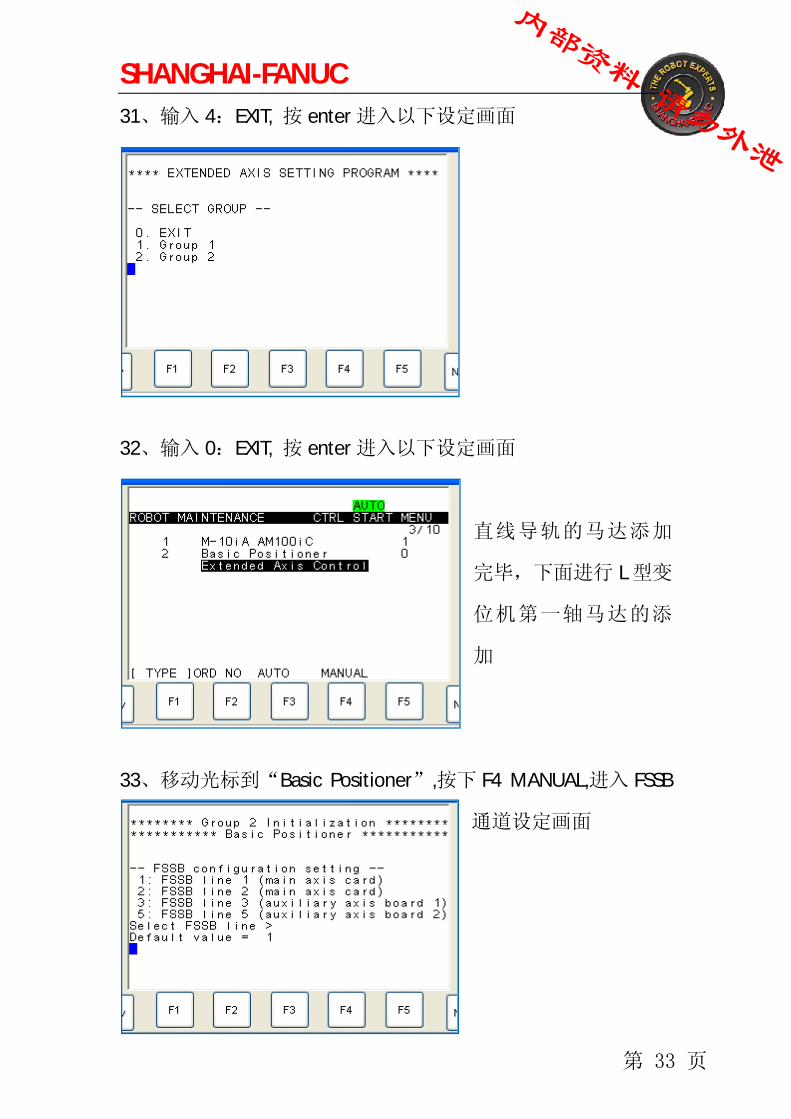
SHANGHAI-FANUC 31、输入 4:EXIT, 按 enter进入以下设定画面
32、输入 0:EXIT, 按 enter进入以下设定画面
直线导轨的马达添加
完毕,下面进行 L型变
位机第一轴马达的添
加
33、移动光标到“Basic Positioner”,按下 F4 MANUAL,进入 FSSB
通道设定画面
内部资料 请勿外泄
第 33 页
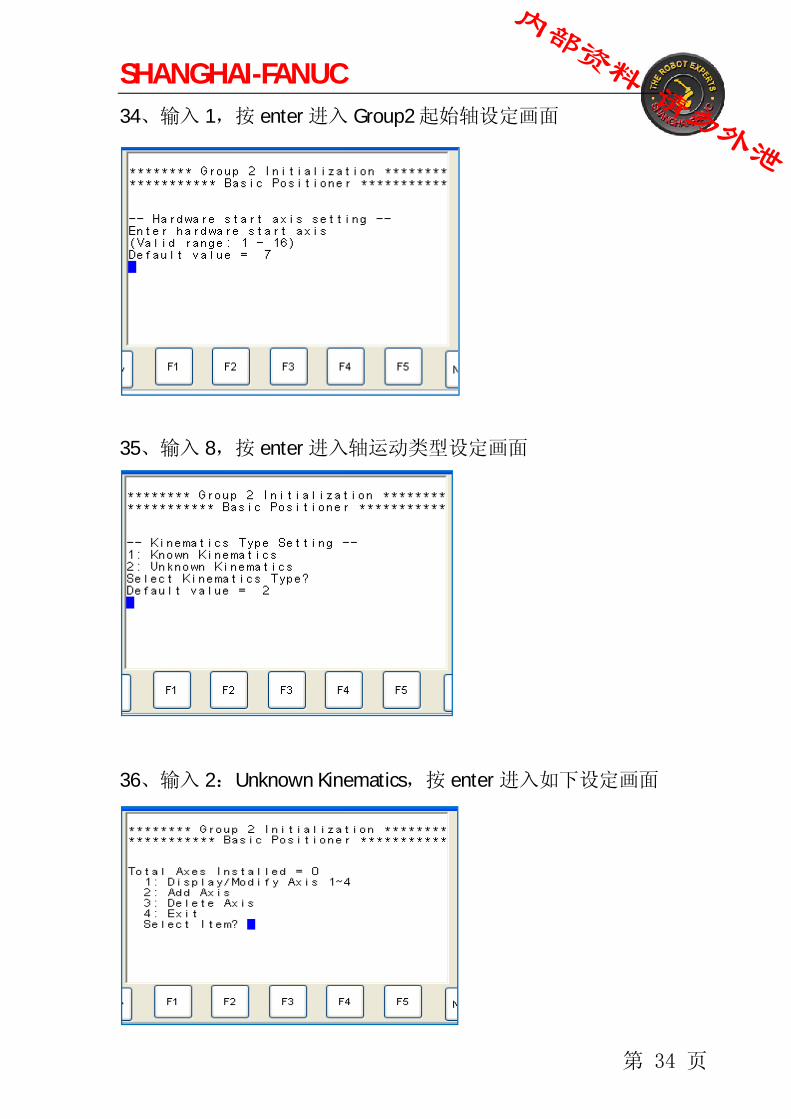
SHANGHAI-FANUC 34、输入 1,按 enter进入 Group2起始轴设定画面
35、输入 8,按 enter进入轴运动类型设定画面
36、输入 2:Unknown Kinematics,按 enter进入如下设定画面
内部资料 请勿外泄
第 34 页
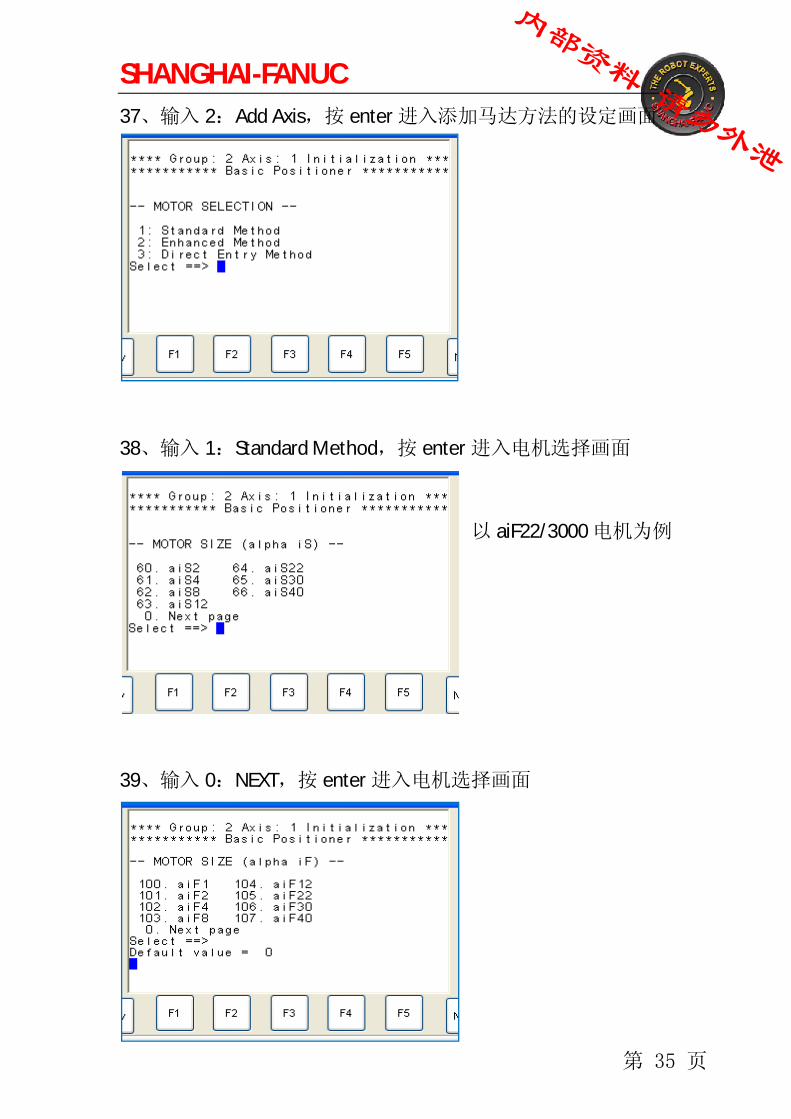
SHANGHAI-FANUC 37、输入 2:Add Axis,按 enter进入添加马达方法的设定画面
38、输入 1:Standard Method,按 enter进入电机选择画面
以 aiF22/3000电机为例
39、输入 0:NEXT,按 enter进入电机选择画面
内部资料 请勿外泄
第 35 页
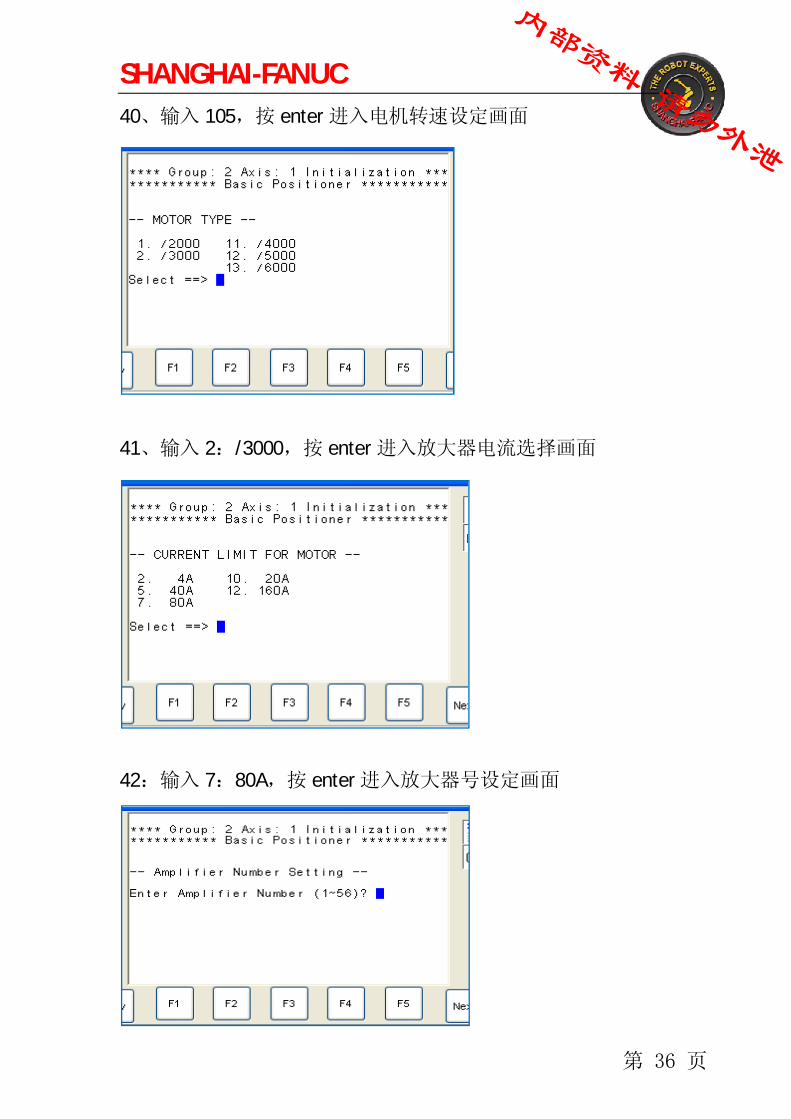
SHANGHAI-FANUC 40、输入 105,按 enter进入电机转速设定画面
41、输入 2:/3000,按 enter进入放大器电流选择画面
42:输入 7:80A,按 enter进入放大器号设定画面
内部资料 请勿外泄
第 36 页
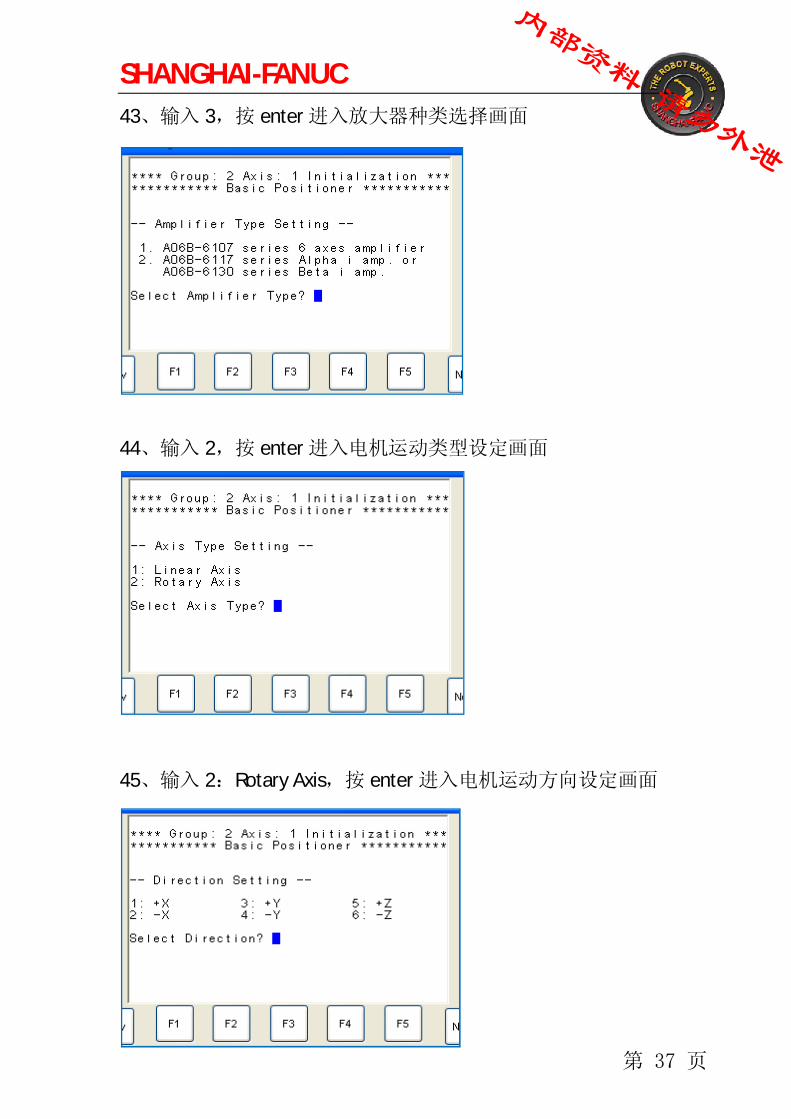
SHANGHAI-FANUC 43、输入 3,按 enter进入放大器种类选择画面
44、输入 2,按 enter进入电机运动类型设定画面
45、输入 2:Rotary Axis,按 enter进入电机运动方向设定画面
内部资料 请勿外泄
第 37 页
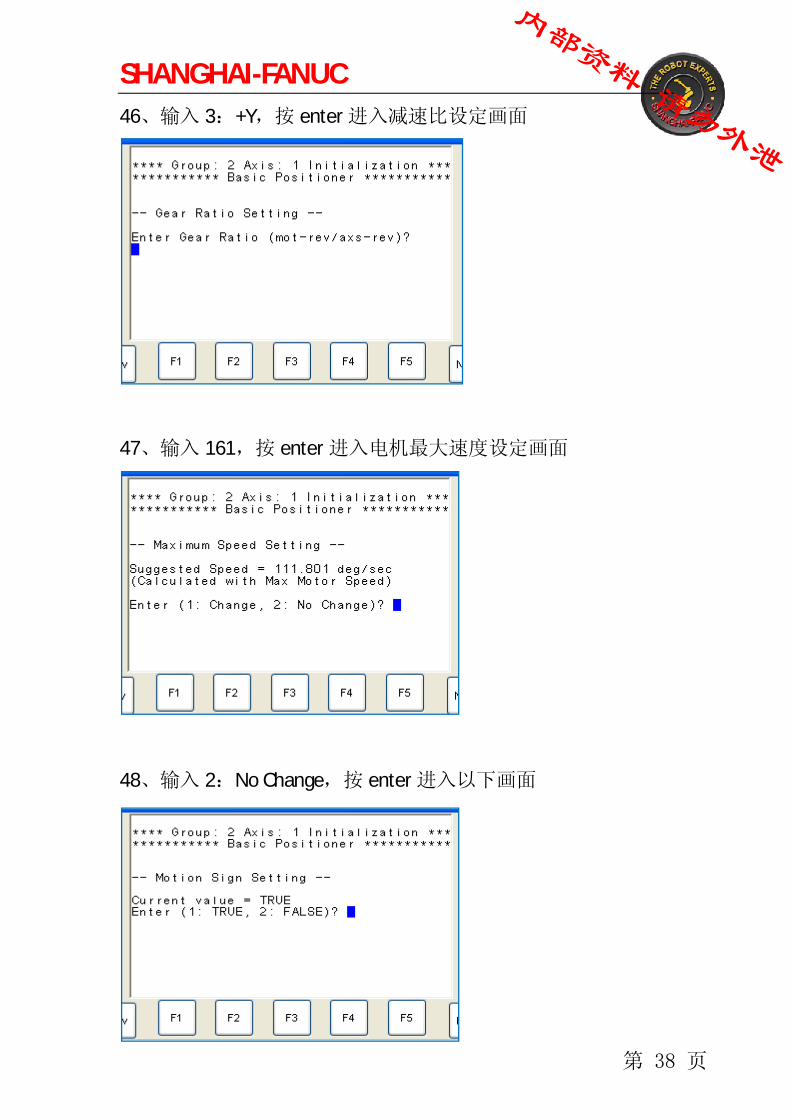
SHANGHAI-FANUC 46、输入 3:+Y,按 enter进入减速比设定画面
47、输入 161,按 enter进入电机最大速度设定画面
48、输入 2:No Change,按 enter进入以下画面
内部资料 请勿外泄
第 38 页
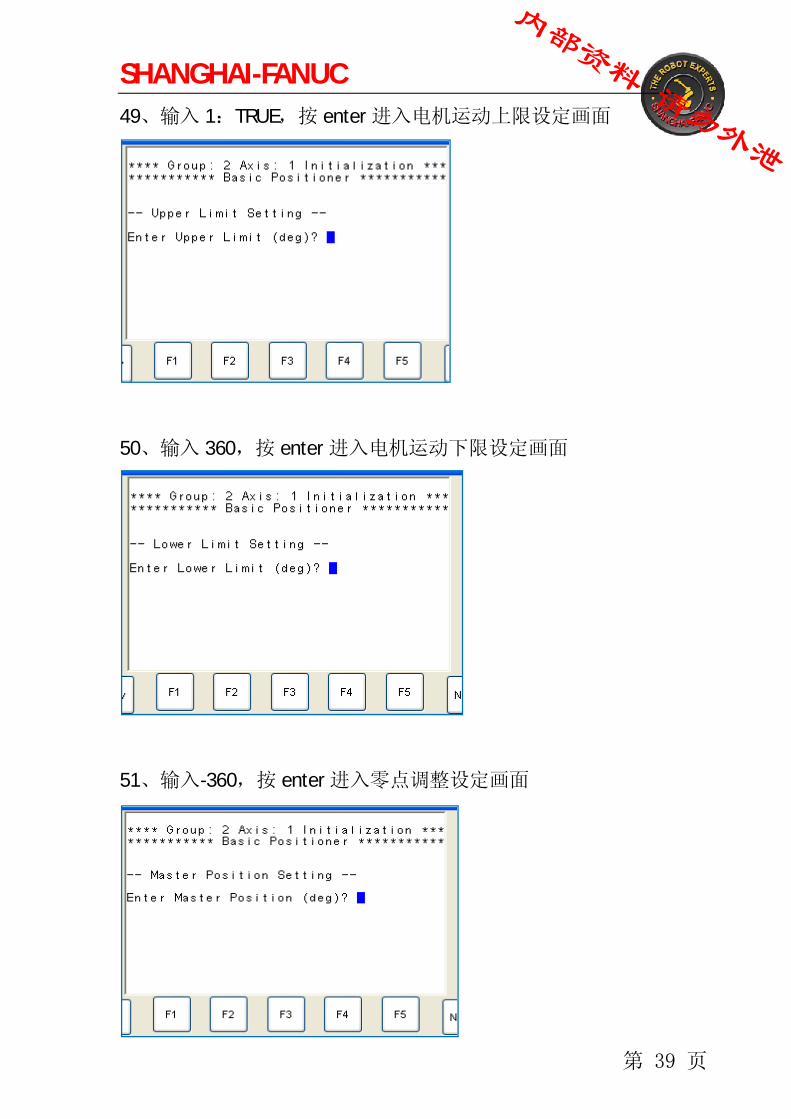
SHANGHAI-FANUC 49、输入 1:TRUE,按 enter进入电机运动上限设定画面
50、输入 360,按 enter进入电机运动下限设定画面
51、输入-360,按 enter进入零点调整设定画面
内部资料 请勿外泄
第 39 页
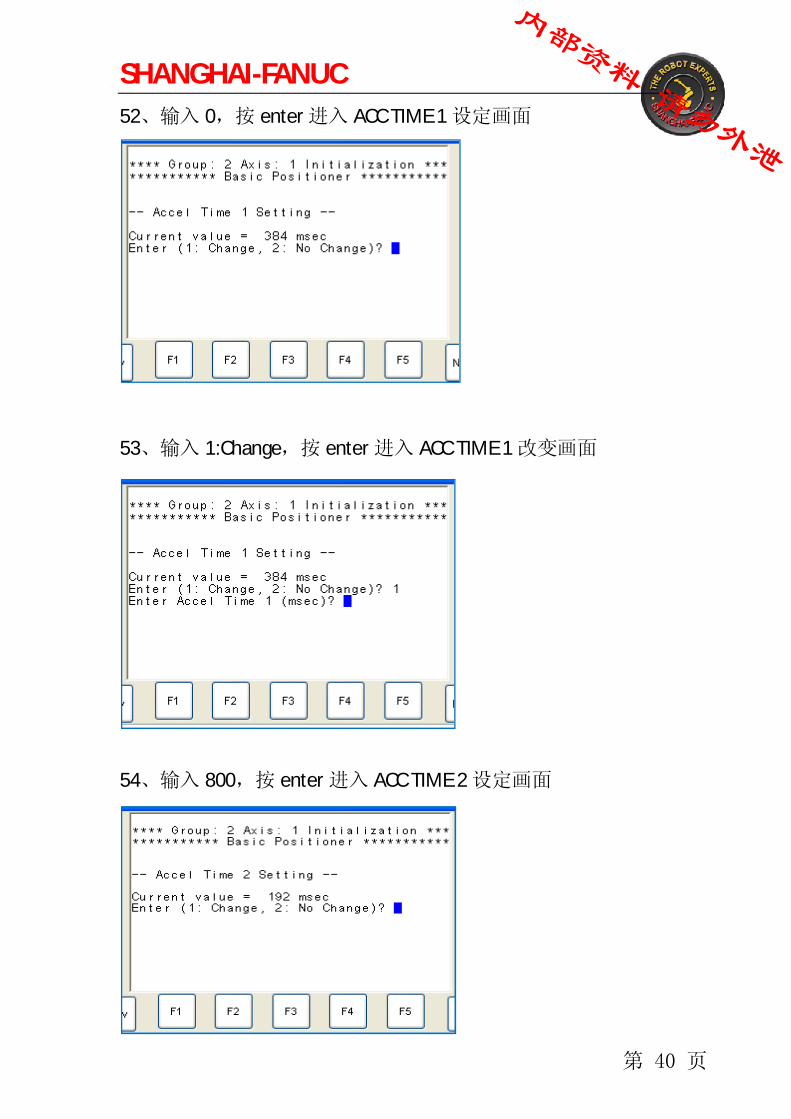
SHANGHAI-FANUC 52、输入 0,按 enter进入 ACC TIME 1设定画面
53、输入 1:Change,按 enter进入 ACC TIME 1改变画面
54、输入 800,按 enter进入 ACC TIME 2设定画面
内部资料 请勿外泄
第 40 页
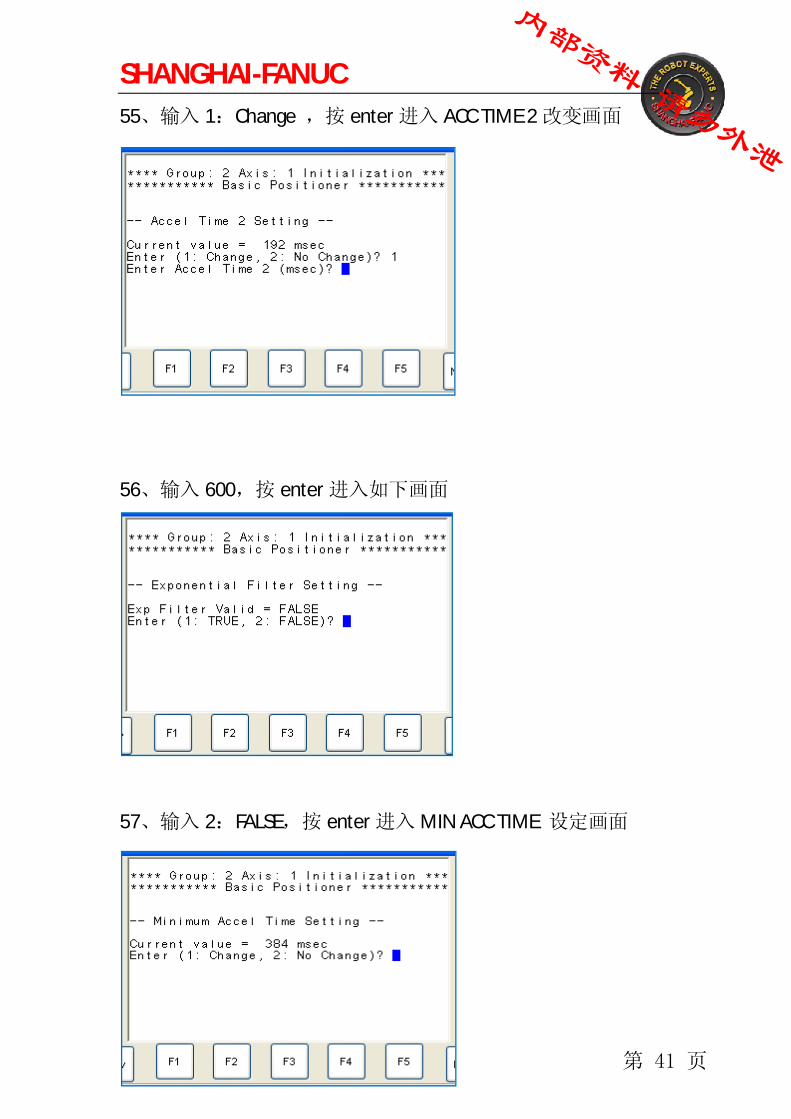
SHANGHAI-FANUC 55、输入 1:Change ,按 enter进入 ACC TIME 2改变画面
56、输入 600,按 enter进入如下画面
57、输入 2:FALSE,按 enter进入MIN ACC TIME 设定画面
内部资料 请勿外泄
第 41 页
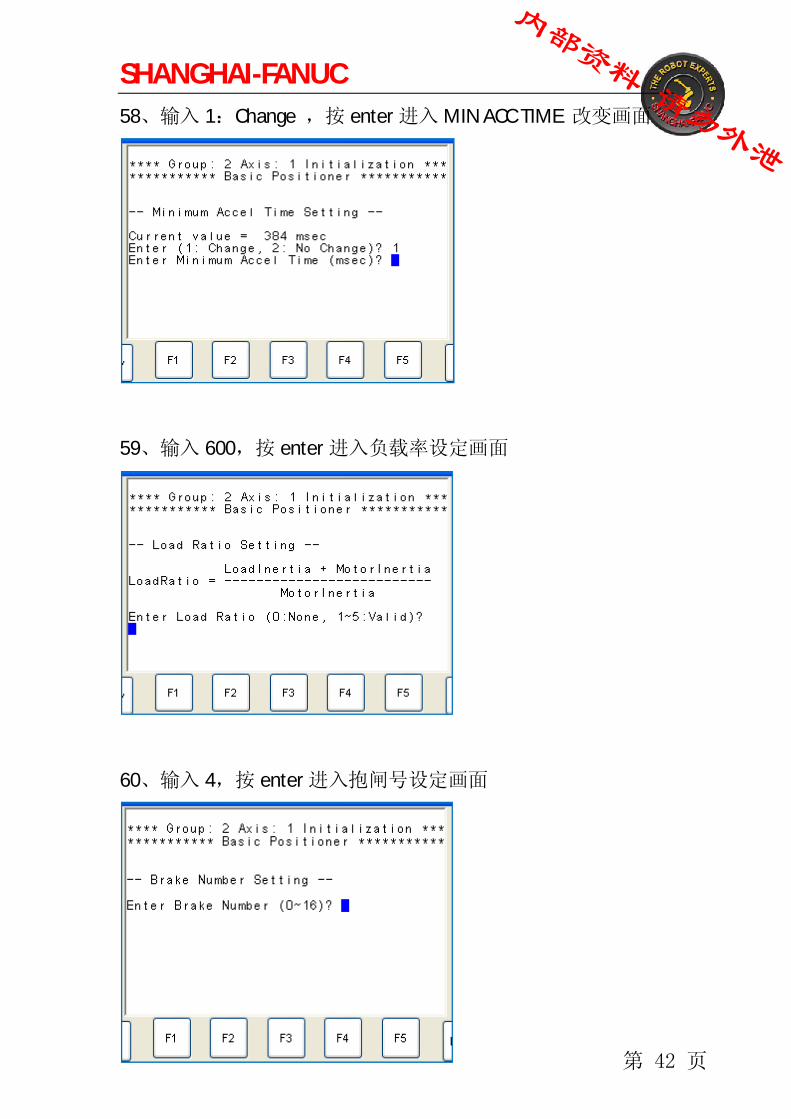
SHANGHAI-FANUC 58、输入 1:Change ,按 enter进入MIN ACC TIME 改变画面
59、输入 600,按 enter进入负载率设定画面
60、输入 4,按 enter进入抱闸号设定画面
内部资料 请勿外泄
第 42 页
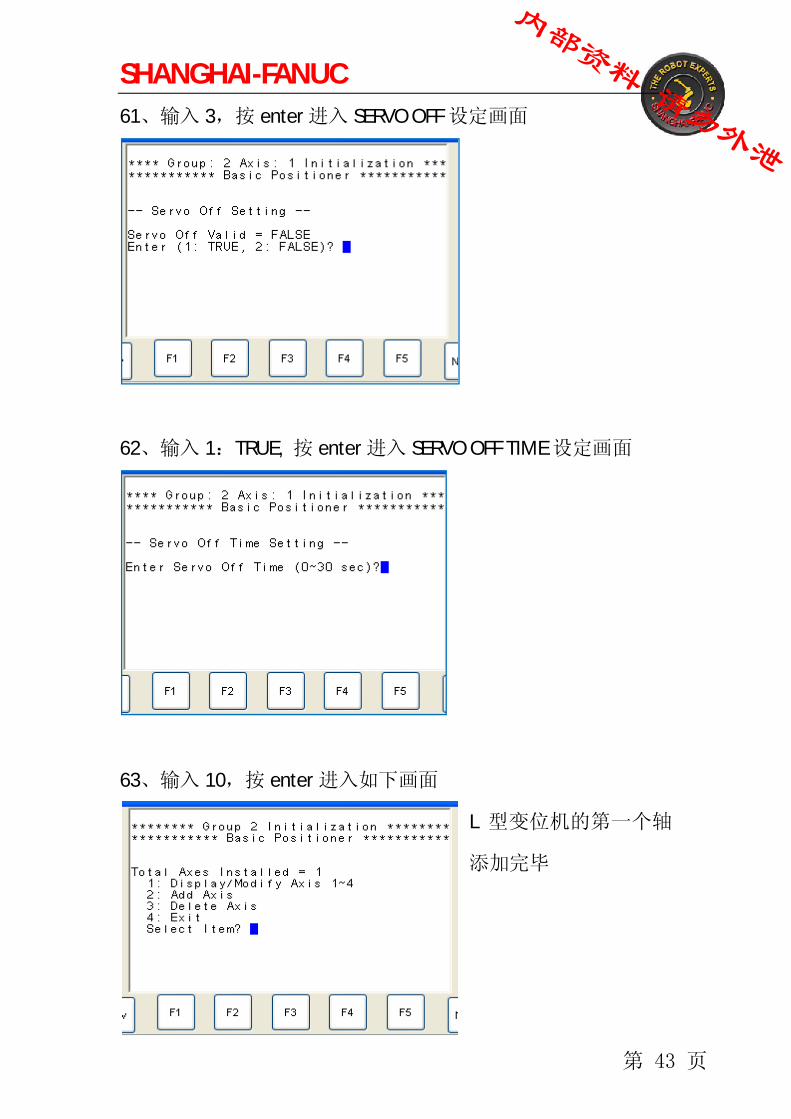
SHANGHAI-FANUC 61、输入 3,按 enter进入 SERVO OFF设定画面
62、输入 1:TRUE, 按 enter进入 SERVO OFF TIME设定画面
63、输入 10,按 enter进入如下画面
L 型变位机的第一个轴
添加完毕
内部资料 请勿外泄
第 43 页
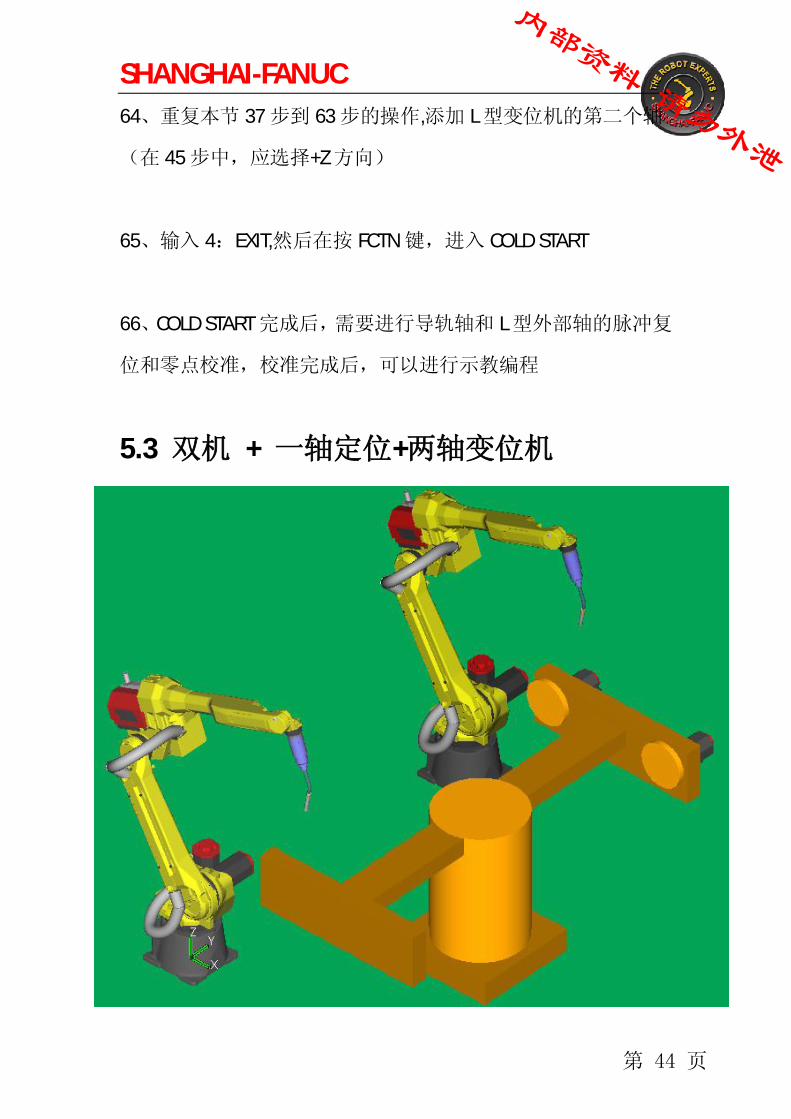
SHANGHAI-FANUC 64、重复本节 37步到 63步的操作,添加 L型变位机的第二个轴
(在 45步中,应选择+Z方向)
65、输入 4:EXIT,然后在按 FCTN键,进入 COLD START
66、COLD START完成后,需要进行导轨轴和 L型外部轴的脉冲复
位和零点校准,校准完成后,可以进行示教编程
5.3 双机 + 一轴定位+两轴变位机
内部资料 请勿外泄
第 44 页
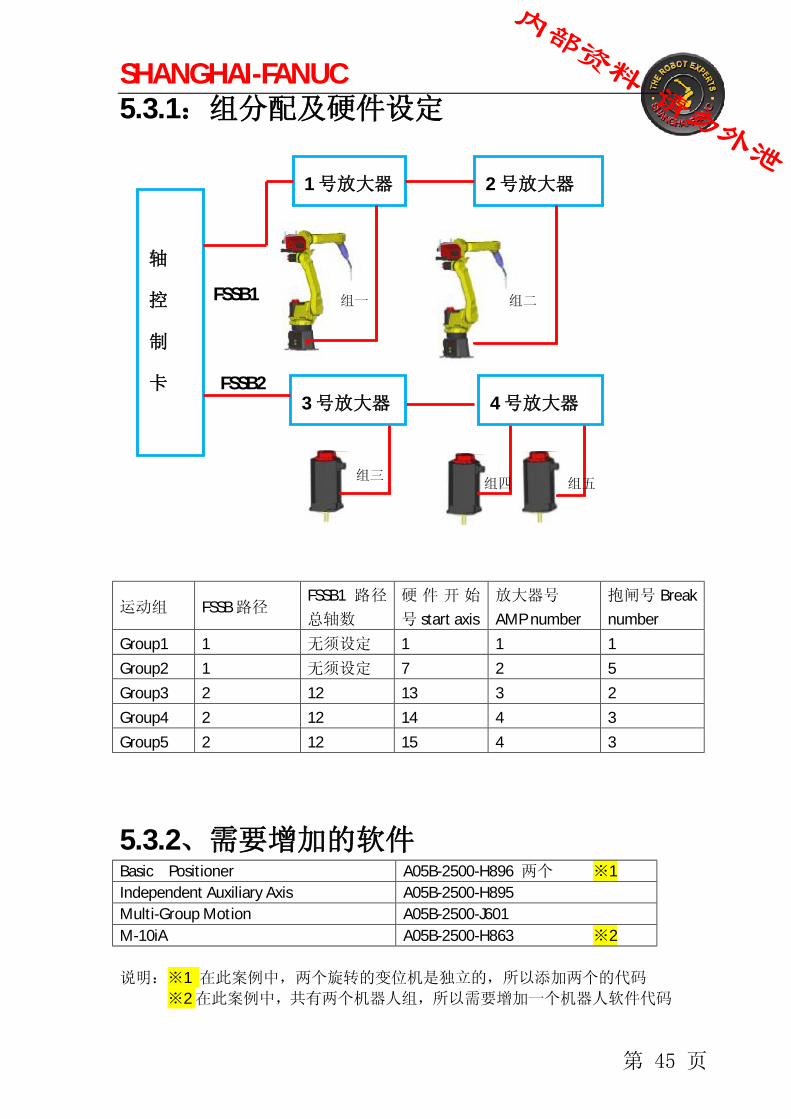
SHANGHAI-FANUC 5.3.1:组分配及硬件设定
运动组 FSSB路径 FSSB1 路径
总轴数
硬 件 开 始
号 start axis
放大器号
AMP number
抱闸号 Break
number
Group1 1 无须设定 1 1 1
Group2 1 无须设定 7 2 5
Group3 2 12 13 3 2
Group4 2 12 14 4 3
Group5 2 12 15 4 3
5.3.2、需要增加的软件 Basic Positioner A05B-2500-H896 两个 ※1 Independent Auxiliary Axis A05B-2500-H895 Multi-Group Motion A05B-2500-J601 M-10iA A05B-2500-H863 ※2 说明:※1 在此案例中,两个旋转的变位机是独立的,所以添加两个的代码 ※2在此案例中,共有两个机器人组,所以需要增加一个机器人软件代码
轴
控
制
卡
1号放大器 2号放大器
FSSB1 组一 组二
组三
3号放大器 4号放大器
组四 组五
FSSB2
内部资料 请勿外泄
第 45 页
SHANGHAI-FANUC
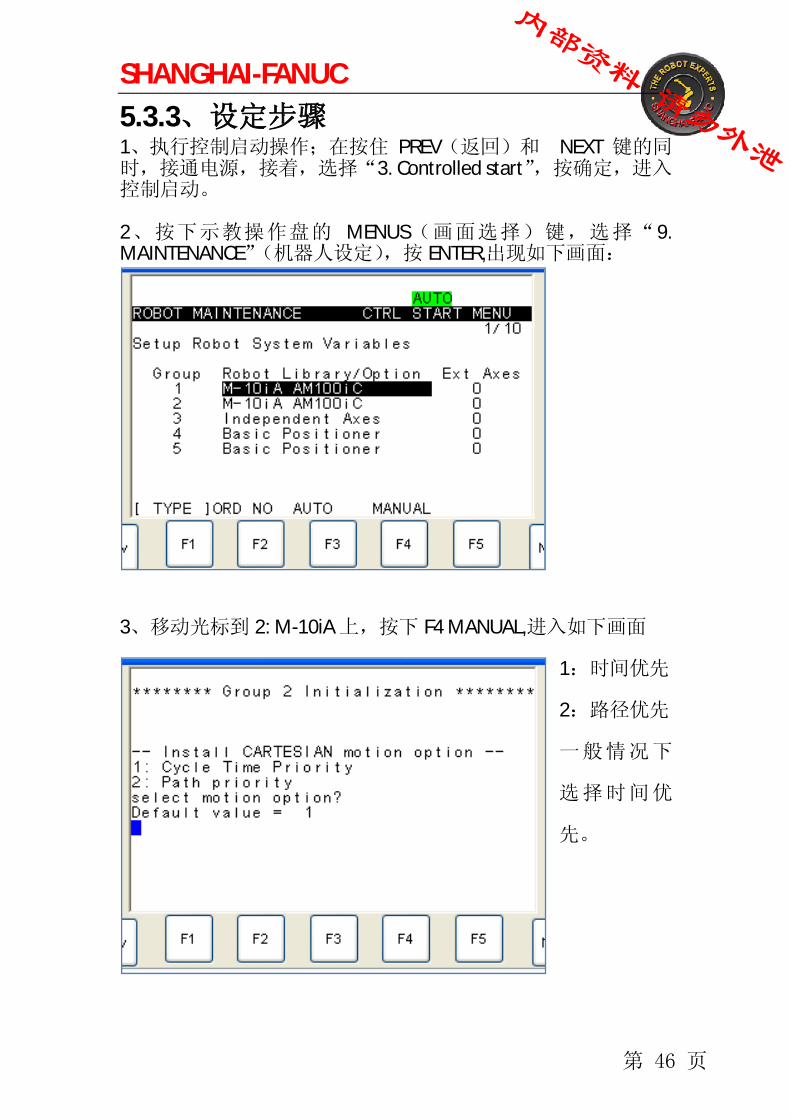
5.3.3、设定步骤 1、执行控制启动操作;在按住 PREV(返回)和 NEXT 键的同时,接通电源,接着,选择“3. Controlled start”,按确定,进入控制启动。 2、按下示教操作盘的 MENUS(画面选择)键,选择“9. MAINTENANCE”(机器人设定),按 ENTER,出现如下画面:
3、移动光标到 2: M-10iA上,按下 F4 MANUAL,进入如下画面
1:时间优先
2:路径优先
一般情况下
选择时间优
先。
内部资料 请勿外泄
第 46 页
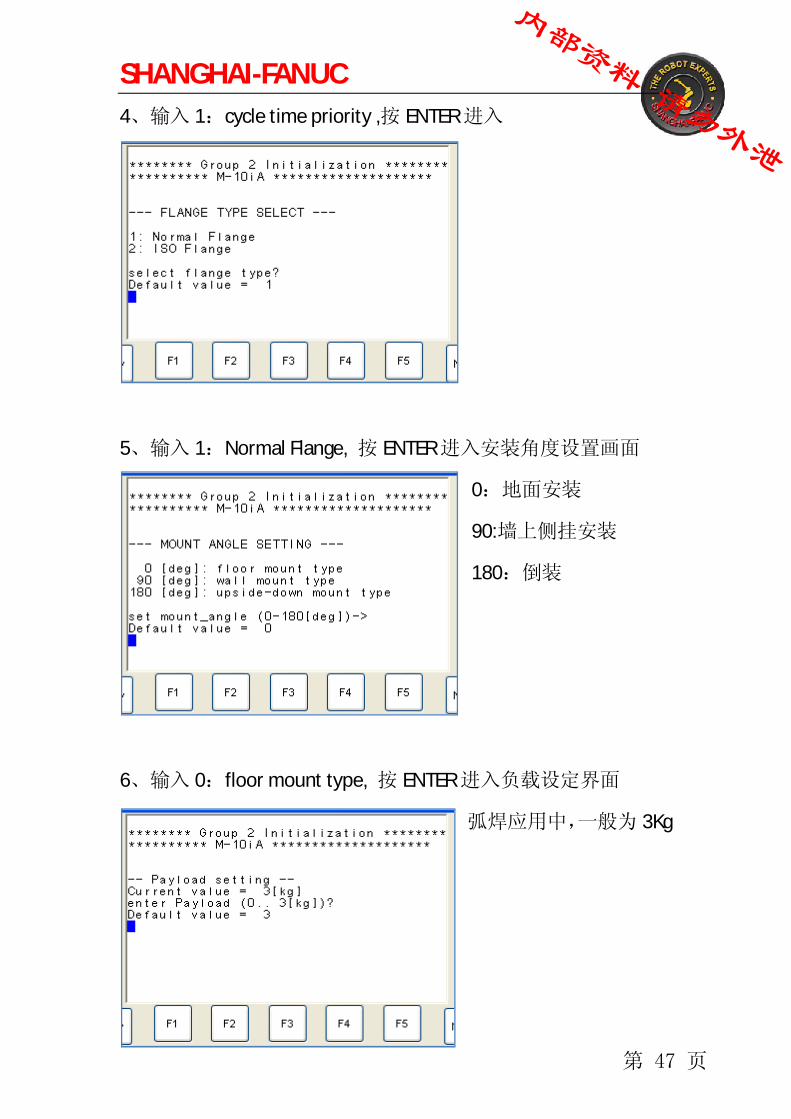
SHANGHAI-FANUC 4、输入 1:cycle time priority ,按 ENTER进入
5、输入 1:Normal Flange, 按 ENTER进入安装角度设置画面
0:地面安装
90:墙上侧挂安装
180:倒装
6、输入 0:floor mount type, 按 ENTER进入负载设定界面
弧焊应用中,一般为 3Kg
内部资料 请勿外泄
第 47 页
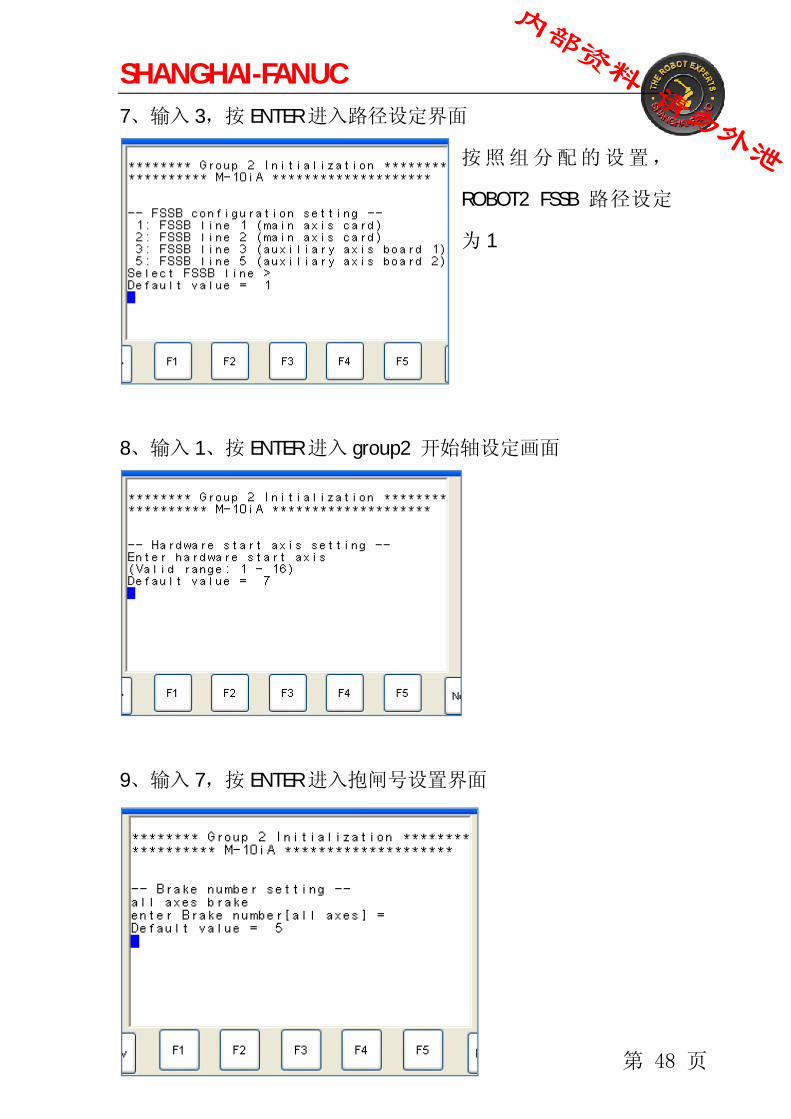
SHANGHAI-FANUC 7、输入 3,按 ENTER进入路径设定界面
按照组分配的设置,
ROBOT2 FSSB 路径设定
为 1
8、输入 1、按 ENTER进入 group2 开始轴设定画面
9、输入 7,按 ENTER进入抱闸号设置界面
内部资料 请勿外泄
第 48 页
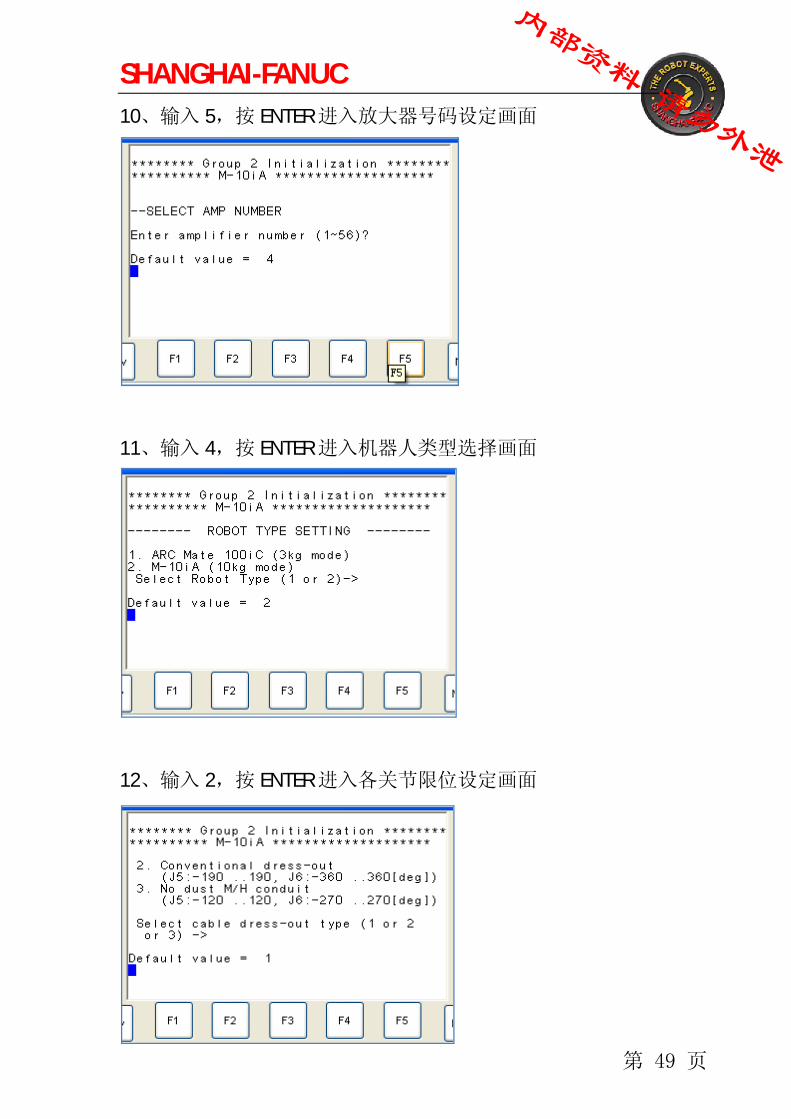
SHANGHAI-FANUC 10、输入 5,按 ENTER进入放大器号码设定画面
11、输入 4,按 ENTER进入机器人类型选择画面
12、输入 2,按 ENTER进入各关节限位设定画面
内部资料 请勿外泄
第 49 页
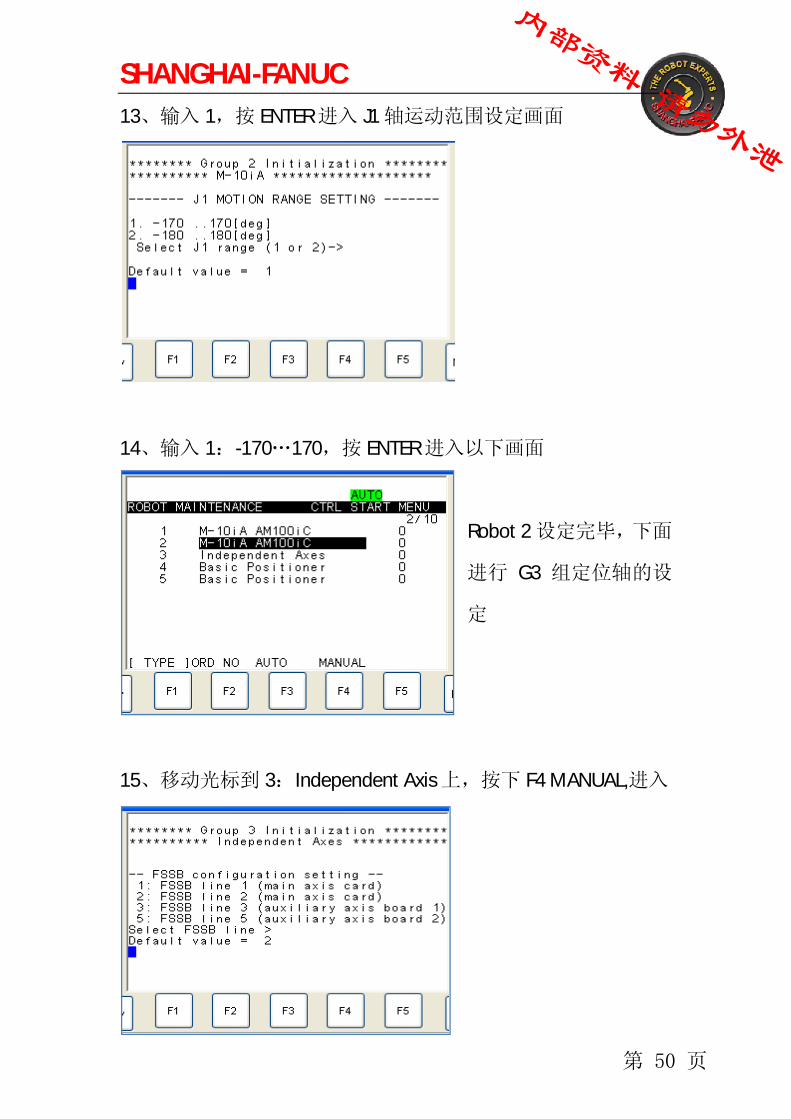
SHANGHAI-FANUC 13、输入 1,按 ENTER进入 J1轴运动范围设定画面
14、输入 1:-170…170,按 ENTER进入以下画面
Robot 2设定完毕,下面
进行 G3 组定位轴的设
定
15、移动光标到 3:Independent Axis上,按下 F4 MANUAL,进入
内部资料 请勿外泄
第 50 页
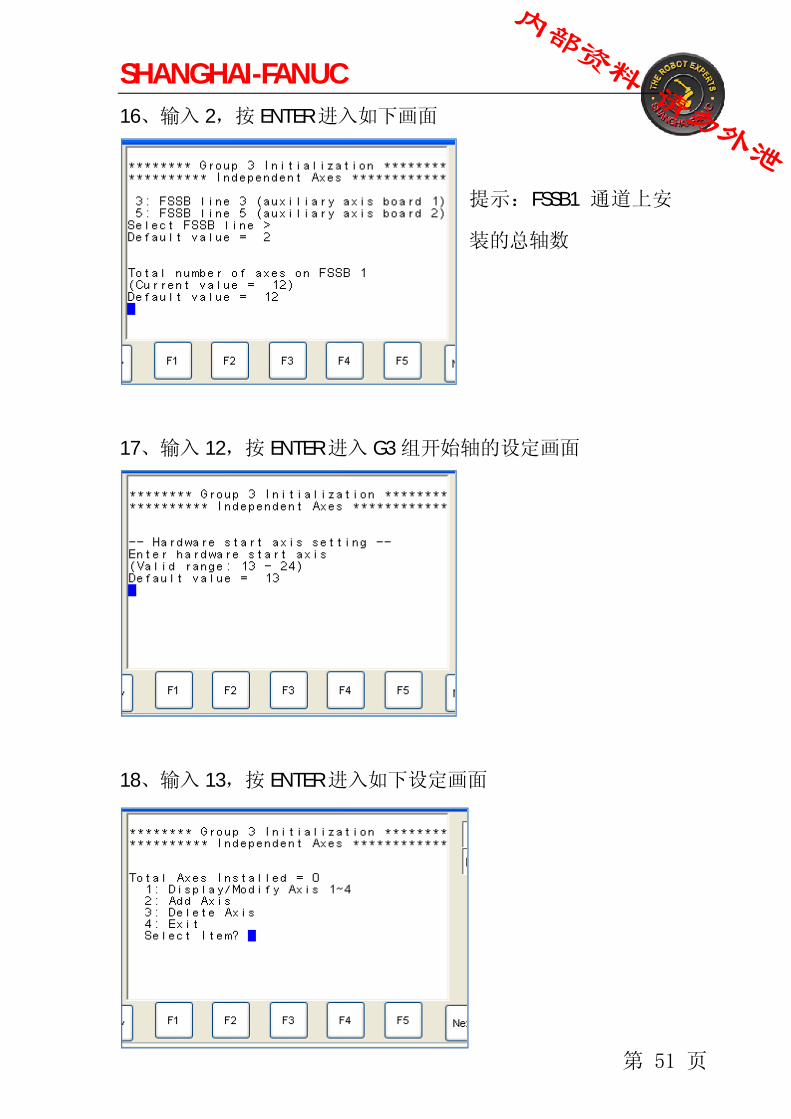
SHANGHAI-FANUC 16、输入 2,按 ENTER进入如下画面
提示:FSSB1 通道上安
装的总轴数
17、输入 12,按 ENTER进入 G3组开始轴的设定画面
18、输入 13,按 ENTER进入如下设定画面
内部资料 请勿外泄
第 51 页
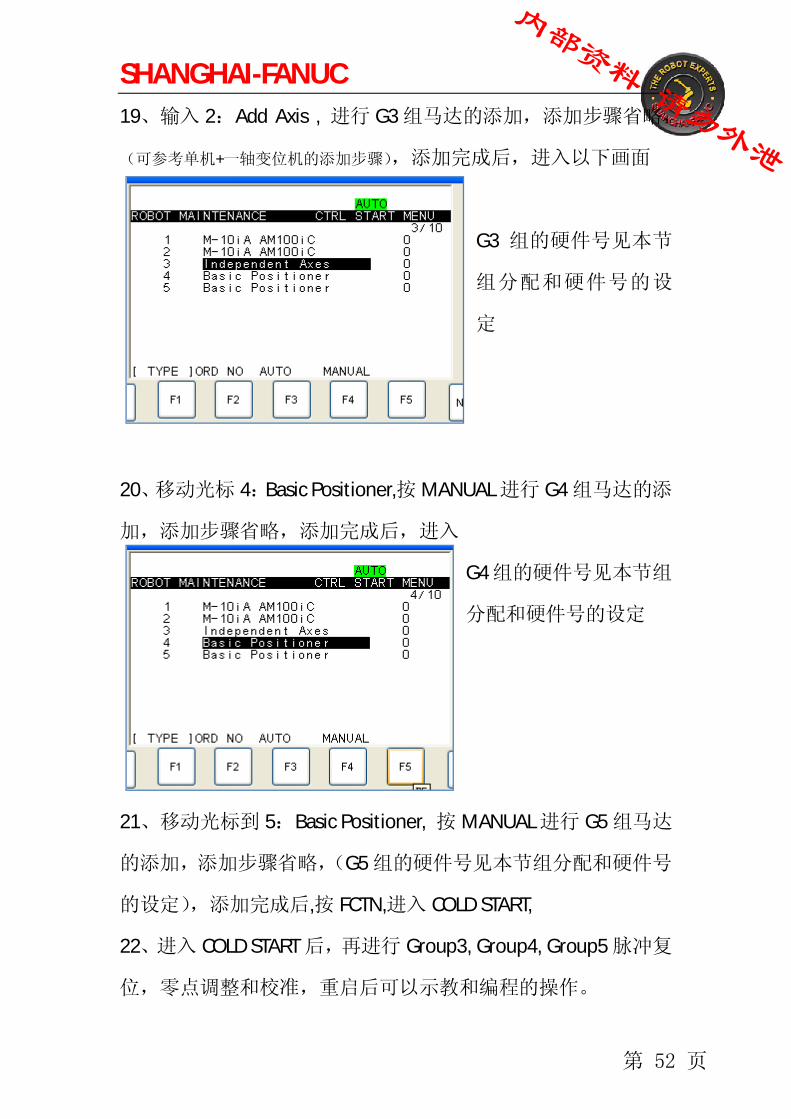
SHANGHAI-FANUC 19、输入 2:Add Axis , 进行 G3组马达的添加,添加步骤省略,
(可参考单机+一轴变位机的添加步骤),添加完成后,进入以下画面
G3 组的硬件号见本节
组分配和硬件号的设
定
20、移动光标 4:Basic Positioner,按MANUAL进行 G4组马达的添
加,添加步骤省略,添加完成后,进入
G4组的硬件号见本节组
分配和硬件号的设定
21、移动光标到 5:Basic Positioner, 按MANUAL进行 G5组马达
的添加,添加步骤省略,(G5组的硬件号见本节组分配和硬件号
的设定),添加完成后,按 FCTN,进入 COLD START,
22、进入 COLD START后,再进行 Group3, Group4, Group5脉冲复
位,零点调整和校准,重启后可以示教和编程的操作。
内部资料 请勿外泄
第 52 页
SHANGHAI-FANUC 附一:常见的故障现象
1、 机器人可以动作,添加的外部轴不能旋转,但又无报警
解决措施:MENU→TEST CYCLE→SET UP→ENTER,通过 F2 group
切换到外部轴的画面,将其 Group Motion设定为 ENBLE
2、 机器人动作正常,但外部轴在点动过程中,发生过载报警
解决措施:先确认外部轴的负载情况,再进行该轴抱闸号的设定
3、 机器人动作正常,但外部轴在点动过程中发生急停报警
解决措施:先确认外部轴的电缆连接情况,再确认该轴抱闸号的
设定是否正确
4、 在双机器人中,暂停信号无法消除
解决措施:确认第二台机器人的暂停信号分配及连接情况,如果
不用该信号的情况下修改系统变量$MULTI_ROBO.$MLT_ENB 为
false;(如果设定该系统变量为 TRUE,在双机器人系统会增加四个
UI和六个 UO,)
5、 配置完成后,发生 SRVO-068 SERVO DTERR 报警
解决措施:确认外部轴的光纤,编码器线的连接情况
内部资料 请勿外泄
第 53 页
SHANGHAI-FANUC
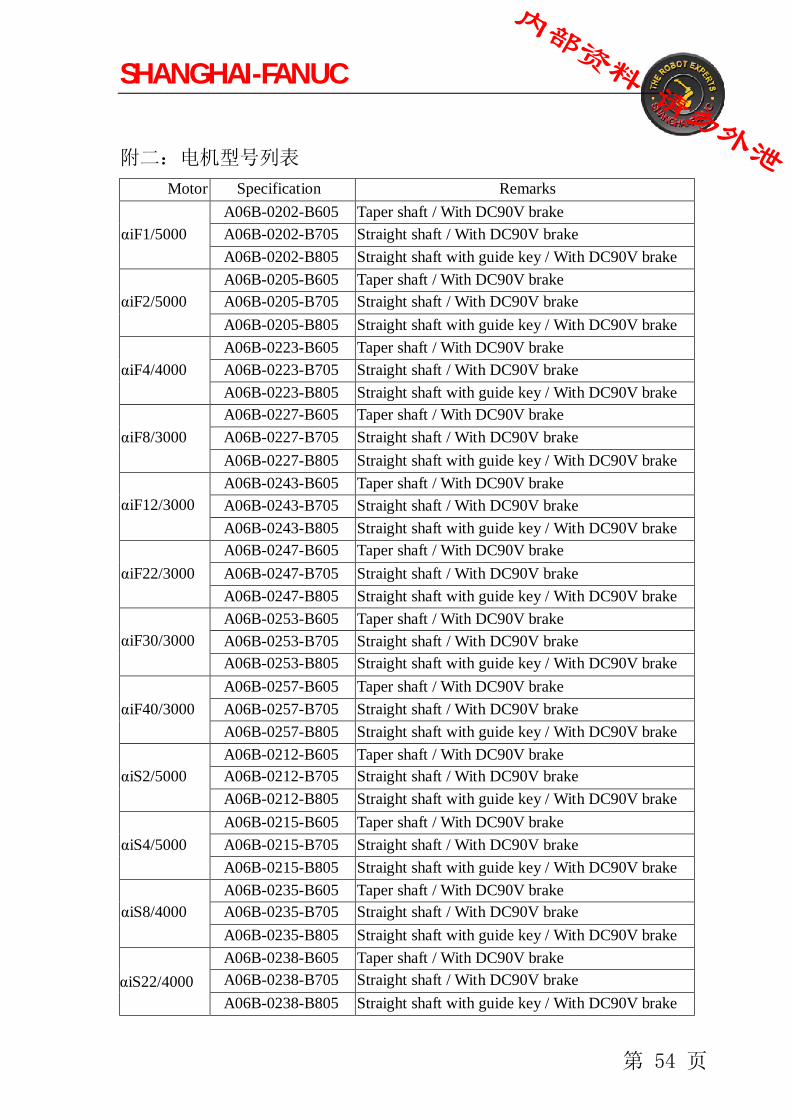
附二:电机型号列表
Motor Specification Remarks
αiF1/5000 A06B-0202-B605 Taper shaft / With DC90V brake A06B-0202-B705 Straight shaft / With DC90V brake A06B-0202-B805 Straight shaft with guide key / With DC90V brake
αiF2/5000 A06B-0205-B605 Taper shaft / With DC90V brake A06B-0205-B705 Straight shaft / With DC90V brake A06B-0205-B805 Straight shaft with guide key / With DC90V brake
αiF4/4000 A06B-0223-B605 Taper shaft / With DC90V brake A06B-0223-B705 Straight shaft / With DC90V brake A06B-0223-B805 Straight shaft with guide key / With DC90V brake
αiF8/3000 A06B-0227-B605 Taper shaft / With DC90V brake A06B-0227-B705 Straight shaft / With DC90V brake A06B-0227-B805 Straight shaft with guide key / With DC90V brake
αiF12/3000 A06B-0243-B605 Taper shaft / With DC90V brake A06B-0243-B705 Straight shaft / With DC90V brake A06B-0243-B805 Straight shaft with guide key / With DC90V brake
αiF22/3000 A06B-0247-B605 Taper shaft / With DC90V brake A06B-0247-B705 Straight shaft / With DC90V brake A06B-0247-B805 Straight shaft with guide key / With DC90V brake
αiF30/3000 A06B-0253-B605 Taper shaft / With DC90V brake A06B-0253-B705 Straight shaft / With DC90V brake A06B-0253-B805 Straight shaft with guide key / With DC90V brake
αiF40/3000 A06B-0257-B605 Taper shaft / With DC90V brake A06B-0257-B705 Straight shaft / With DC90V brake A06B-0257-B805 Straight shaft with guide key / With DC90V brake
αiS2/5000 A06B-0212-B605 Taper shaft / With DC90V brake A06B-0212-B705 Straight shaft / With DC90V brake A06B-0212-B805 Straight shaft with guide key / With DC90V brake
αiS4/5000 A06B-0215-B605 Taper shaft / With DC90V brake A06B-0215-B705 Straight shaft / With DC90V brake A06B-0215-B805 Straight shaft with guide key / With DC90V brake
αiS8/4000 A06B-0235-B605 Taper shaft / With DC90V brake A06B-0235-B705 Straight shaft / With DC90V brake A06B-0235-B805 Straight shaft with guide key / With DC90V brake
αiS22/4000 A06B-0238-B605 Taper shaft / With DC90V brake A06B-0238-B705 Straight shaft / With DC90V brake A06B-0238-B805 Straight shaft with guide key / With DC90V brake
内部资料 请勿外泄
第 54 页
SHANGHAI-FANUC
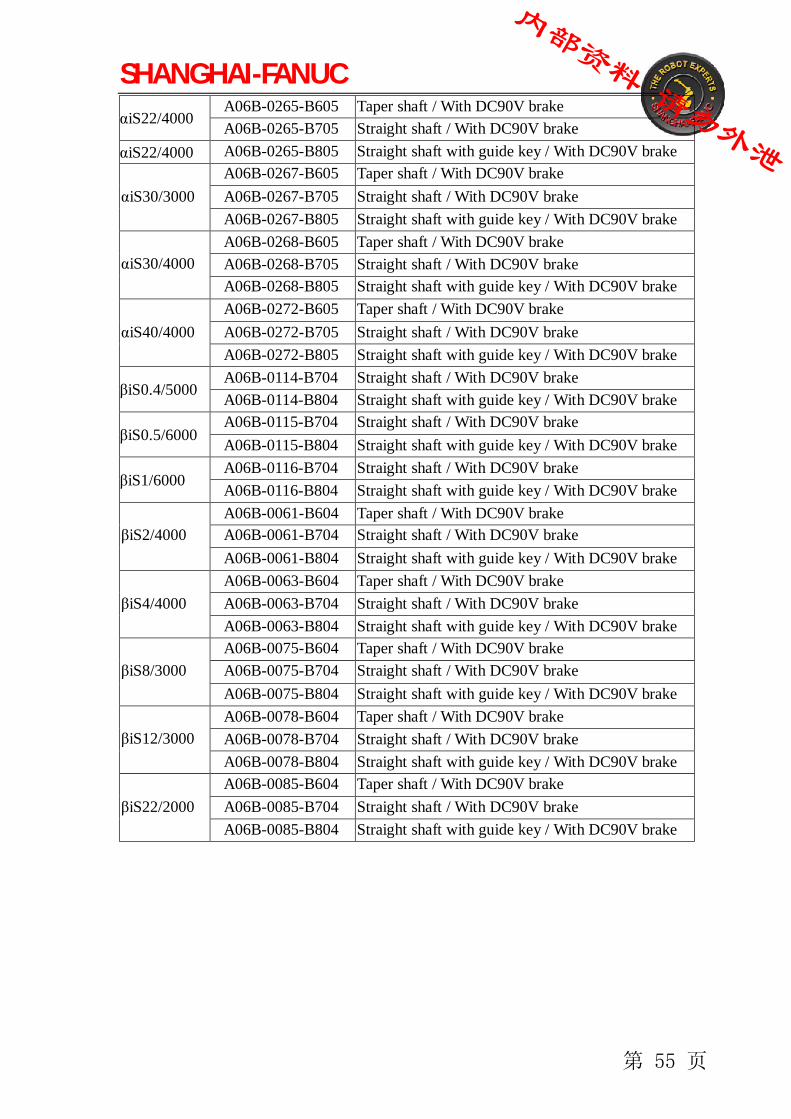
αiS22/4000 A06B-0265-B605 Taper shaft / With DC90V brake A06B-0265-B705 Straight shaft / With DC90V brake
αiS22/4000 A06B-0265-B805 Straight shaft with guide key / With DC90V brake
αiS30/3000 A06B-0267-B605 Taper shaft / With DC90V brake A06B-0267-B705 Straight shaft / With DC90V brake A06B-0267-B805 Straight shaft with guide key / With DC90V brake
αiS30/4000 A06B-0268-B605 Taper shaft / With DC90V brake A06B-0268-B705 Straight shaft / With DC90V brake A06B-0268-B805 Straight shaft with guide key / With DC90V brake
αiS40/4000 A06B-0272-B605 Taper shaft / With DC90V brake A06B-0272-B705 Straight shaft / With DC90V brake A06B-0272-B805 Straight shaft with guide key / With DC90V brake
βiS0.4/5000 A06B-0114-B704 Straight shaft / With DC90V brake A06B-0114-B804 Straight shaft with guide key / With DC90V brake
βiS0.5/6000 A06B-0115-B704 Straight shaft / With DC90V brake A06B-0115-B804 Straight shaft with guide key / With DC90V brake
βiS1/6000 A06B-0116-B704 Straight shaft / With DC90V brake A06B-0116-B804 Straight shaft with guide key / With DC90V brake
βiS2/4000 A06B-0061-B604 Taper shaft / With DC90V brake A06B-0061-B704 Straight shaft / With DC90V brake A06B-0061-B804 Straight shaft with guide key / With DC90V brake
βiS4/4000 A06B-0063-B604 Taper shaft / With DC90V brake A06B-0063-B704 Straight shaft / With DC90V brake A06B-0063-B804 Straight shaft with guide key / With DC90V brake
βiS8/3000 A06B-0075-B604 Taper shaft / With DC90V brake A06B-0075-B704 Straight shaft / With DC90V brake A06B-0075-B804 Straight shaft with guide key / With DC90V brake
βiS12/3000 A06B-0078-B604 Taper shaft / With DC90V brake A06B-0078-B704 Straight shaft / With DC90V brake A06B-0078-B804 Straight shaft with guide key / With DC90V brake
βiS22/2000 A06B-0085-B604 Taper shaft / With DC90V brake A06B-0085-B704 Straight shaft / With DC90V brake A06B-0085-B804 Straight shaft with guide key / With DC90V brake
内部资料 请勿外泄
第 55 页
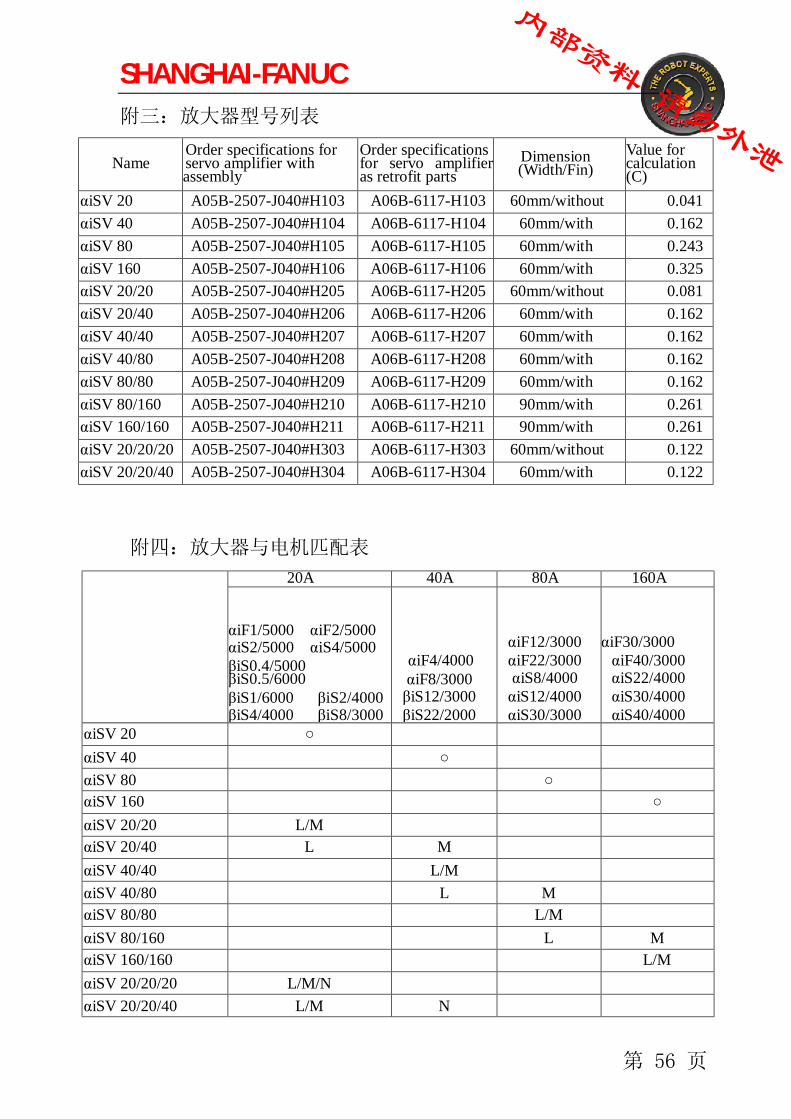
SHANGHAI-FANUC 附三:放大器型号列表
附四:放大器与电机匹配表
Name Order specifications for servo amplifier with assembly
Order specifications for servo amplifier as retrofit parts
Dimension (Width/Fin)
Value for calculation (C)
αiSV 20 A05B-2507-J040#H103 A06B-6117-H103 60mm/without 0.041 αiSV 40 A05B-2507-J040#H104 A06B-6117-H104 60mm/with 0.162 αiSV 80 A05B-2507-J040#H105 A06B-6117-H105 60mm/with 0.243 αiSV 160 A05B-2507-J040#H106 A06B-6117-H106 60mm/with 0.325 αiSV 20/20 A05B-2507-J040#H205 A06B-6117-H205 60mm/without 0.081 αiSV 20/40 A05B-2507-J040#H206 A06B-6117-H206 60mm/with 0.162 αiSV 40/40 A05B-2507-J040#H207 A06B-6117-H207 60mm/with 0.162 αiSV 40/80 A05B-2507-J040#H208 A06B-6117-H208 60mm/with 0.162 αiSV 80/80 A05B-2507-J040#H209 A06B-6117-H209 60mm/with 0.162 αiSV 80/160 A05B-2507-J040#H210 A06B-6117-H210 90mm/with 0.261 αiSV 160/160 A05B-2507-J040#H211 A06B-6117-H211 90mm/with 0.261 αiSV 20/20/20 A05B-2507-J040#H303 A06B-6117-H303 60mm/without 0.122 αiSV 20/20/40 A05B-2507-J040#H304 A06B-6117-H304 60mm/with 0.122
20A 40A 80A 160A
αiF1/5000 αiF2/5000 αiS2/5000 αiS4/5000 βiS0.4/5000 βiS0.5/6000 βiS1/6000 βiS2/4000 βiS4/4000 βiS8/3000
αiF4/4000 αiF8/3000 βiS12/3000 βiS22/2000
αiF12/3000 αiF22/3000 αiS8/4000 αiS12/4000 αiS30/3000
αiF30/3000 αiF40/3000 αiS22/4000 αiS30/4000 αiS40/4000
αiSV 20 ○ αiSV 40 ○ αiSV 80 ○ αiSV 160 ○ αiSV 20/20 L/M αiSV 20/40 L M αiSV 40/40 L/M αiSV 40/80 L M αiSV 80/80 L/M αiSV 80/160 L M αiSV 160/160 L/M αiSV 20/20/20 L/M/N αiSV 20/20/40 L/M N
内部资料 请勿外泄
第 56 页
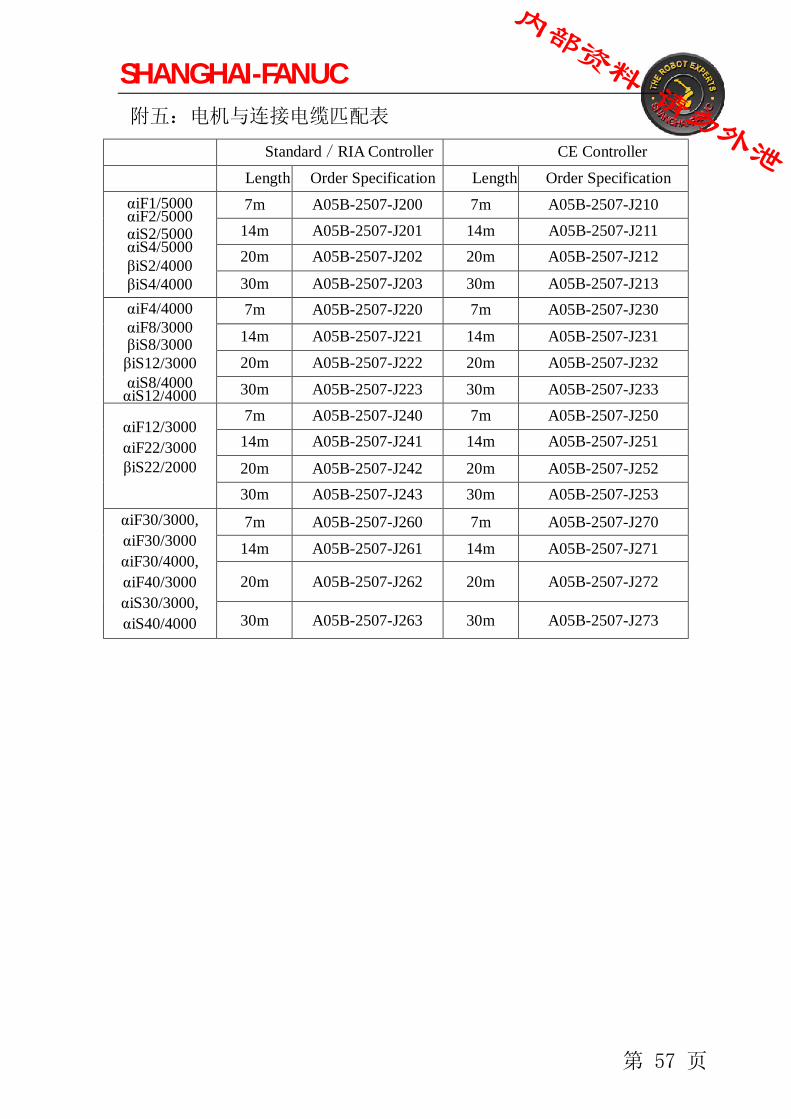
SHANGHAI-FANUC 附五:电机与连接电缆匹配表
Standard/RIA Controller CE Controller
Length Order Specification Length Order Specification αiF1/5000 αiF2/5000 αiS2/5000 αiS4/5000 βiS2/4000 βiS4/4000
7m A05B-2507-J200 7m A05B-2507-J210 14m A05B-2507-J201 14m A05B-2507-J211 20m A05B-2507-J202 20m A05B-2507-J212
30m A05B-2507-J203 30m A05B-2507-J213 αiF4/4000 αiF8/3000 βiS8/3000 βiS12/3000 αiS8/4000 αiS12/4000
7m A05B-2507-J220 7m A05B-2507-J230
14m A05B-2507-J221 14m A05B-2507-J231
20m A05B-2507-J222 20m A05B-2507-J232
30m A05B-2507-J223 30m A05B-2507-J233
αiF12/3000 αiF22/3000 βiS22/2000
7m A05B-2507-J240 7m A05B-2507-J250 14m A05B-2507-J241 14m A05B-2507-J251
20m A05B-2507-J242 20m A05B-2507-J252 30m A05B-2507-J243 30m A05B-2507-J253
αiF30/3000, αiF30/3000 αiF30/4000, αiF40/3000 αiS30/3000, αiS40/4000
7m A05B-2507-J260 7m A05B-2507-J270
14m A05B-2507-J261 14m A05B-2507-J271
20m A05B-2507-J262 20m A05B-2507-J272
30m A05B-2507-J263 30m A05B-2507-J273
内部资料 请勿外泄
第 57 页





























