Embed Size (px)
DESCRIPTION
2009 Valenzuela Camila
Citation preview
1
EHESS - ENS - UNIVERSITE PARIS DESCARTES
Laboratoire Psychologie de la Perception, Université René Descartes Paris V
SENSE OF BODY OWNERSHIP AND THE
PERCEPTION OF PAIN
Dissertation Master in Cognitive Science Presented by Camila Valenzuela Moguillansky
Under the direction of Kevin O’Regan
June 2009

2
Table of Contents
Acknowledgments 3
Summary 4
1 Introduction 5
1.1 Sense of Body-ownership............................................................................................................................................51.2 The Rubber Hand Illusion ...........................................................................................................................................51.3 The present study ........................................................................................................................................................112 Method 13
2.1 Participants ....................................................................................................................................................................132.2 General Procedure.......................................................................................................................................................132.3 Measurements...............................................................................................................................................................16
2.3.1 Proprioceptive drift ................................................................................................................................................162.3.2 Pain and heat intensity .........................................................................................................................................162.3.3 Localisation of pain ...............................................................................................................................................162.3.4 Questionnaire ...........................................................................................................................................................16
3 Results 17
3.1 Occurrence of the RHI ..............................................................................................................................................183.1.1 Proprioceptive Drift...............................................................................................................................................183.1.2 Questionnaire ...........................................................................................................................................................19
3.2 Perception of pain .......................................................................................................................................................203.3 Perception of warmth.................................................................................................................................................213.4 Locus of pain. ...............................................................................................................................................................234 Discussion 24
4.1 Proprioceptive drift.....................................................................................................................................................244.2 Questionnaire................................................................................................................................................................254.3 Perception of pain intensity .....................................................................................................................................274.4 Perception of warmth intensity...............................................................................................................................284.5 Localisation of pain ....................................................................................................................................................304.6 Methodological Remarks..........................................................................................................................................325 Conclusion 33
3
Acknowledgments
In the first place I would like to specially thank Professor Kevin O’Regan who carefully guide
this project, for his great support, long discussions, his great patience, and trust.
Many thanks to the Pain Treatment Department of the Ambroise Paré Hospital, specially to
Dr. Didier Bouhasira and Françoise Morain.
Thanks to my friends, especially to Andrea Desantis for his great support, comments and
inspiring discussions, to Sergiu Popesco for his corrections and to Francisca Gutierrez for her
helpful comments.
Thanks to Professor Claire Petitmengin for her helpful ideas.
Thank to RISC for their nice people, their hospitality, great support and coffee supply.
And always special thank to my family, for their unconditionally support and trust.
4
Summary
A recent study suggests that when, by use of the so-called "Rubber Hand Illusion" (Botvinick
& Cohen 1998), a person is induced to feel that a fake rubber hand is his or her own hand, the
temperature of the real hand is reduced (Moseley et al. 2008). This result suggests the
surprising fact that transfer of perceived body ownership of a limb can have the effect of
modifying the limb's physiological body parameters.
Similarities in neural pathways involved in pain and temperature perception and regulation
lead us to hypothesise that a transfer of body-ownership might also have the companion effect
of decreasing the intensity of perceived pain. Furthermore, we conjectured that the
localisation of pain sensation would shift towards the rubber hand.
We tested these hypotheses with an experimental procedure based on the standard Rubber
Hand Illusion protocol, but including a method to measure pain perception by thermal
stimulation. Our results show that participants’ estimation of pain indeed decreases when they
feel ownership of the rubber hand. Pain sensation is also localised closer to the rubber hand.
An additional finding shows on the other hand that there is no significant effect of body-
ownership on estimations of warmth (rather than pain), suggesting that pain and warmth
sensations may involve two separate systems.

5
1 Introduction
1.1 Sense of Body-ownership
The sense of body-ownership is a concept that comes from the field of cognitive science and
philosophy of mind dealing with the sense of self. This concept refers to the experience of
being the owner of one’s body and the fact that it is one’s own body that is undergoing
experiences affecting the body (Gallagher 2000) 1. Although it is difficult to imagine the
possibility of feeling a sensation that does not belong to one's own body, there are
pathological and non-pathological situations were this occurs. Within the clinical literature for
example there are several disorders linked to a deficit in feeling of body ownership (entirely
or partially) which can be caused by different kinds of damage: neurological damage,
peripheral nerve disruption, deafferentation and local anaesthesia (de Vignemont 2007).
Asomatognosia for example is a case caused by neurological damage where a patient feels a
tactile stimulus applied to her hand but does not attribute the hand as belonging to her.
It is also possible to alter the sense of body ownership by creating illusory experiences in
healthy individuals (Testavin 1937, Botvinick and Cohen 1998, Holmes and Spence 2005,
Lenggenhager et al 2007). In this work I will concentrate in this kind of manipulation of
body-ownership modification. Specifically I will use the experimental paradigm of the
"Rubber Hand Illusion" (RHI) introduced by Botvinick & Cohen (1998) to modify the sense
of ownership of participants’ hands.
1.2 The Rubber Hand Illusion
In the RHI, a person watches a rubber hand being stroked in the same place and at the same
time that they feel their own hidden hand being stroked. After a few minutes, the person gets
the peculiar impression that the RH belongs to them. The most common measures used to
account for this phenomenon are a quantitative measure consisting in a displacement of the
felt position of the hidden hand in the direction of the RH, termed proprioceptive drift, and a
qualitative measure consisting in the person's report assessed by a questionnaire. The illusion 1 Within the categories of the self that has been established by Gallagher, the sense of body-ownership has been distinguished from the sense of agency. The sense of agency involves the awareness that I am the cause of an action or a thought; in the context of an action it would correspond to –“I am moving my body". On the other hand, the sense of body-ownership would correspond to – “I know that my body is moving”. This conceptual distinction does not suggest that these two aspects are dissociated; in our ordinary life they merge together and give rise to a coherent experience of self.
6
works in approximately 60-80% of the people tested (Kammers et al 2009, Durgin et al
2007). It has been shown that the illusion is effective only when the stroking of the real and
the rubber hand is synchronous. When the real and the RH are not stroked synchronously, a
much smaller proprioceptive drift is observed and the subjects do not report having the
impression that the RH belongs to them (Botvinick and Cohen 1998, Ramachandran 2003,
Tsakiris and Haggard 2005, Tsakiris and Haggard 2006, Ehrsson et al 2004, Ehrsson et al
2005, Ehrsson et al 2006, Moseley et al 2008, Schütz-Bosbach et al 2009).
In addition to this first condition of synchronicity, another condition for the illusion to be
established is that the hand has to be in an anatomically plausible position and it has to
resemble the real hand (Graziano 2000, Tsakiris and Haggard 2005, Tsakiris and Haggard
2006, Costantini & Haggard, 2007 Ehrsson et al 2004). This fact has been interpreted in terms
of resemblance to a previous mental body representation that has to be fulfilled in order for
the illusion to work. Some authors refer to this mental representation as the body schema
(Tsakiris and Haggard 2005), others as the body image (Ramachandran 2003). But frequently
these concepts are used without carefully distinguishing them (Paillard 1999). According to
the classical definition, the body schema is an unconscious, dynamically modifiable model of
the topographic configuration of our body (Bernard 1995, Paillard 1999, Constantitni and
Haggard 2007). The body image on the other hand involves a conscious and conceptual body
representation. It encompasses ideas, attitudes and beliefs toward one's own body (Gallagher
2005; Costantini and Haggard 2007).
This second condition of coherence between the rubber hand (or the object involved) and the
mental representation of our body has opened a discussion in relation to the possible
components of the illusion in terms of bottom-up and top-down mechanisms (Tsakiris and
Haggard 2005, Tsakiris and Haggard 2006, Schütz-Bosbach et al 2009, Constantitni and
Haggard 2007). This discussion will be further explained when presenting the conditions for
the illusion to work.
The fact that individuals undergoing the RHI have the feeling that the rubber hand belongs to
them has been considered as an alteration in the sense of body-ownership. For this reason it
has been widely used as experimental paradigm to study different aspect of the sense of body-
ownership (e.g., Armel& Ramachandran, 2003; Costantini & Haggard, 2007; Durgin, Evans,
Dunphy, Klostermann, & Simmons, 2007; Ehrsson, Holmes, & Passingham, 2005; Ehrsson,
Spence, & Passingham, 2004; Ehrsson, Wiech, Weiskopf,Dolan, & Passingham, 2007; Farnè,
Pavani, Meneghello, &Làdavas, 2000; Holmes, Snijders, & Spence, 2006; Pavani, Spence, &
Driver, 2000; Press, Heyes, Haggard,& Eimer, 2008; Tsakiris & Haggard, 2005; Tsakiris,
7
Hesse, Boy, Haggard, & Fink, 2007; Tsakiris, Prabhu, & Haggard, 2006; Walton & Spence,
2004, Peled, Ritsner, Hirschmann, Geva, Modai, 2000)
Let us consider now the mechanism that has been proposed to explain the RHI.
The illusion has been described in terms of a multi-sensory correlation. Within the multi-
sensory correlation theory there are different views that explain the phenomenon in slightly
different terms (see Botvinick and Cohen 1998 for connectionist model, Ramachandran 2003
for Bayesian mechanism, Makin et al 2008 for peri-personal space framework, Pavani 2000
for visual capture mechanism), yet it is widely accepted that integration of patterns of multi-
sensory activity underlies the illusion.
The covariance of the spatial and temporal pattern of visual stimuli (coming from the RH) and
tactile stimuli (coming from the subject’s hand) is perceived as if the seen stimulus is coming
from the person’s hand. A mechanism of this sort is suggested to underlie the ability to
identify our body as belonging to us, in other words to the sense of body ownership (Ehrsson
2004, Botvinick 2004). Evidence from brain activity studies corroborates this proposal.
Thus, Graziano et al (2000) replicate the RHI protocol in monkeys. They measured single cell
activity of multimodal neurons in area 5 of the parietal cortex. Graziano and collaborators
showed that in the case of synchronous stroking of the RH and the monkey’s hidden hand, the
pattern of activity of area 5 cells were similar to that when the monkeys looked at its own
hand. On the contrary, when the RH and real hand were stroked asyncrhonously, the cells
were no longer sensitive to the position of the RH. Furthermore these visuo-tactile neurons
have visual receptive fields that are bodily centered and not retinotopically centered, meaning
that their response to visual stimuli depends on the position of the body part to which their
tactile receptive field corresponds (Graziano 2000, Farnè 2000).
In the brain imaging study performed by Ehrsson and colleagues (2004) where they
investigated the fMRI pattern of subjects that were induced with the RHI, they found that the
illusion was accompanied by activation of the cerebellum and pre-motor cortex. The
activation correlates with the strength of the illusion and is synchronous with the illusion
onset. Later, in order to test if the RHI was induced without visual input, Ehrsson et al (2005)
performed an experiment where they induced a “somatic” RHI. In their study the
experimenter moved the blindfolded participant’s left index finger so that it touched the fake
hand, and simultaneously, the experimenter touched the participant’s real right hand,
synchronizing the touches as perfectly as possible. After some seconds, this stimulation
elicited an illusion that the subject was touching her or his own hand. The authors observed
that even in the absence of visual input their previous results were replicated: the pre-motor
8
cortex and cerebellum were activated in the presence of the RHI and the strength of the
activation correlated to the intensity of the illusion. They interpreted their results by
suggesting that neural activity in the cerebellum and pre-motor cortex probably reflects the
feeling of body-ownership of the hand rather than a visual representation of the hand being
brushed. (Ehrsson 2005).
Another interesting brain imaging result comes from a study done by Tsakiris and
collaborators (2007). They used positron emission tomography (PET) to measure the brain
activity linked to the RHI. Their results showed activation in the ipsilateral posterior insula
that correlates to the experience of ownership of the rubber hand. On the contrary, when
subjects failed to experience the RHI, there was activation of the contralateral somatosensory
cortex. They distinguished between brain activity linked to the causes and brain activity
linked to the effects of the RHI. They claim that the activity in the pre-motor cortex found by
Ehrsson underpin the process of multi-sensory correlation that causes the RHI, whereas the
activity in the posterior insula correlates with the effects of the illusion, namely the
experience of ownership of the RH. Pre-motor cortex receives strong inputs from parietal
regions that integrate visual, tactile and proprioceptive inputs; the cerebellum is also known
for having inputs from different sensory modalities (Graziano 2000, Ehrsson 2005). Thus
these findings confirm the theory, which proposes multi-sensorial correlation as a mechanism
for identifying a body part as belonging to the self.
It has been maintained that the correlation processes underlying the sense of ownership are
asymmetrical: a small transformation of what the subject sees reduces the illusion more than
the equivalent transformation of what they feel (Costantini & Haggard 2007).
Costantini & Haggard (2007) performed an experiment where they studied the sensitivity of
the RHI to mismatches between visual and somatic experience. They compared the spatial
mismatch between the stimulation of the two hands, and equivalent mismatches between the
postures of the two hands. They created the mismatch either by adjusting the stimulation or
the posture of the subject’s hand, or by adjusting the stimulation or the posture of the rubber
hand. When the subject’s hand posture was slightly different from the rubber hand’s posture,
the RHI remained as long as stimulation of the two hands was congruent in a hand-centered
spatial reference frame, even though the altered posture of the subject’s hand meant that
stimulation was incongruent in external space. Conversely, the RHI was reduced when the
stimulation was incongruent in hand-centered space but congruent in external space. They
concluded that the visual–tactile correlation that causes the RHI is computed within a hand-
centred frame of reference, which is updated with changes in body posture and they claimed,
9
“Current sensory evidence about what is ‘me’ is interpreted with respect to a prior mental
body representation”.
This brings us to the question of body representation, which is addressed by the second
condition required for the RHI to work. I will present three studies that illustrate the debate in
relation to this issue.
The first study is that by Ramachandran et al (2003). The authors carried out three
experiments where they recorded skin conductance response (SCR) and phenomenological
report of participants undergoing the RHI. They tested to what extent the subjects
incorporated the RH through ostensibly threatening the RH by bending its fingers. They also
studied to what extent this reaction persisted when presenting a non-hand like object and a
hand object but in an anatomically implausible position. The first experiment addressed the
question of whether the finger of the fake hand seemed painful, and whether the participant
registered an SCR. The phenomenological reports and SCR revealed that subjects felt the
threat of the RH significantly more in the synchronous than in the asynchronous condition --
suggesting that the RHI caused the participants to believe that was their real hand that was
being threatened. The second experiment aimed to test if participants would experience the
illusion in the case that the form of the external object was manipulated. The experimenter
synchronously tapped the bare table and the participants' hidden hand. Phenomenological
reports indicated hat the RH was more effective in inducing the RHI than the bare table. On
the contrary there was no significant difference in SCR between these two conditions. The
third experiment aimed to answer the question of whether the participants would still
experience the illusion if the location of the external object were manipulated. They placed
the fake hand 0.91m further forward than the real hand and a fake finger was bent back for the
painful stimulus. The results showed that subjects identified with the fake hand and the distant
fake hand, as measured by both self-report and SCR, more in the conditions when touch was
synchronized than when it was not synchronized. They concluded that image of our body is
transitory internal construct, easily modified by multisensory correlation mechanism, which is
resistant to “top-down” modulation.
The second study is performed by Tsakiris and Haggard (2005) and argues against
Ramachandran’s conclusion by claiming that there is a top-down influence of the body
schema on the size of the illusion.
In their first experiment participants watched the rubber hand in a position congruent with
their own hand (0°) or in an incongruent position, rotated 90° with respect to their own hand.
The stimulation between the real and the rubber hand was either synchronous or
10
asynchronous. In a second condition the authors wanted to test the hypothesis put forward by
Ramachandran (2003) in the study described above. In this condition they replaced the rubber
hand by a wooden stick, and used asynchronous stroking as control. Differences between
synchronous and asynchronous conditions were significant only when participants saw a
rubber hand at a posture congruent with their own hand. This suggests that the mere
correlation of tactile and visual stimulation of one’s own hand and a neutral object is not
enough to induce the illusion. In a second experiment they manipulated the handedness of the
rubber hand. They found that the incongruent rubber hand did not elicit the illusion. In the
discussion of their results, they present the interplay of multi-sensory correlation and
constraints of anatomical congruency and physical similarity, in terms of bottom-up and top-
down processes. They argue that although a bottom-up process of visuotactile correlation
underlies the build-up of the illusion, it is modulated by top-down mechanisms originating
from the representation of one’s body. The authors suggest that these two conditions for the
RHI to work reflect the interplay between both sensory input and conceptual interpretation in
the construction of the cognitive representation of the body.
The third study argues against the hypothesis that conceptual interpretations play a role in the
RHI. Schütz-Bosbach et al (2009) performed a study that aimed at investigating whether
conceptual interpretation of the sensory quality of visual and tactile sensations influences the
occurrence of the illusion. Participants watched a rubber hand being stroked by a piece of soft
material or by a piece of rough material while they received tactile stimulation by a material
that was either congruent or incongruent with respect to the sensory quality of the material
touching the rubber hand. They hypothesised that if the RHI implied a conceptual
interpretation, the RHI would occur only in those conditions in which the tactile and visual
input were congruent not just with respect to the timing but also with respect to the tactile
property of the material with which the stimulation was being done. Their results show that
the congruency between the seen and felt quality of the stimuli did not affect the occurrence
of the RHI either measured by subjective report or by the proprioceptive drift. They conclude
that interpretations of hand sensations are resistant to the RHI, and that the RHI is not affected
by conceptual interpretations.
Although up to now, there is neither a clear theoretical framework nor a clear mechanism to
explain this “second, top down condition”, it is widely accepted that multisensorial
correlation is not sufficient to induce the RHI. If there is participation of top-down
mechanisms such as conceptual interpretations, this needs to be confirmed.
11
1.3 The present study
The experiment which provides the motivation for the present work, is a recent study done by
Moseley et al (2008). In a series of six experiments they show that sense of ownership of a
rubber hand (RH) generates a decrease in temperature of the hidden real hand and a decrease
in the ability to do temporal discrimination of pairs of tactile stimuli given to the hidden hand.
Moseley suggests that the RHI could induce a sort of “replacement” of the subject’s hand.
This replacement would cause a modification of the base-line values of parameters defining
the self. The feeling of body-ownership of the RH could imply not just rearrangement in the
hand’s spatial reference frame as evidenced with the proprioceptive drift, but also in baselines
of physiological thresholds.
If the RHI implies a sort of “abandonment” of the real hand as suggested by Moseley, we
could speculate that the effects found in the real hand’s temperature might extend to other
parameters. An interesting possibility would be that temperature sensation and perhaps
thermal pain sensation might be lowered too.
An argument to consider this possibility comes from the fact that temperature and pain
sensations are thought to belong to the same system. This view considers pain as a
homeostatic indicator and modulator, a behavioural drive caused by physiological imbalance
(Craig 2002). A further argument comes from experience. Pain sensation quickly brings our
awareness to our body, to the experience that we own a body. Pain drives us to relieve painful
sensation in a body part. Thus, it is possible that modification of a body-part’s ownership
might be accompanied by modification of the felt pain in that body part.
In this study we address the question whether modification in the sense of body-ownership
alters the perceived intensity and localisation of pain.
To this end we carried out an experiment where we combined the classic RHI protocol with a
method to measure pain elicited by thermal stimulation.
Participants watched the RH being stroked while their own unseen hand was stroked
synchronously. After two minutes a thermic stimulus was given to the real hand. Participants
were asked to evaluate the quality (painful or warmth), intensity of the pain and warmth
sensations, and the position of the felt pain. This procedure was repeated for 6 different
temperatures (ranging from 38°C to 48°C). The felt intensity and location of each stimulus
was compared with a control condition where the RH was not stroked.
We also registered the perceived warmth intensity for each stimulus. Even though painful and
warmth sensations share common substrates in terms of peripheral and central structures and
12
organization, there is experimental (Han et al 1998, Davis et al 1998, Iannetti et al 2003) and
experiential evidence to consider them as different systems. For this reason we asked
participants to evaluate, on two different scales, the felt intensity of both warmth and pain for
a given stimulus.
We hypothesised that in the presence of the RHI, the thresholds of pain perception of the real
hand would be modified, and that as a result the intensity of the perceived pain would be
reduced. Furthermore, we conjecture that the localisation of the pain sensation should shift
towards the rubber hand.
To our knowledge, no one has investigated these questions. Positives results would shed light
on new aspects of the conscious experience of owning a body and the unconscious processes
that uphold this body. In addition, showing that the RHI diminishes pain, opens new
possibilities in the field of pain research and treatment.
13
2 Method
2.1 Participants
Following approval by a local Ethics Committee, the experiments were performed on paid
healthy participants who were carefully briefed about the experimental procedures and who
gave informed written consent. The volunteers were informed that they would feel various
non-painful or painful sensations but they were not informed about the illusion. A total of 21
subjects participated in the experiment.
2.2 General Procedure
Each participant took part in an experimental session that lasted about 75 minutes.
Participants’ hand temperature was controlled at the beginning of the experiment with an
infrared thermometer. In the case that participant’s hand temperature was lower than 30°C,
we asked them to rinse them with hot water and then we waited for stabilization of the hand
temperature before starting the experiment. There were no cases where participants’ hands
needed to be cooled down before the beginning of the experiment.
Participants seated in front of a table; the stimulated arm was placed inside a specially
constructed cardboard box (Figure 1). Subjects were able to place their hand through a hole
cut in the front of the box; another hole on top of the box allowed the participant to see the
rubber hand; most of the back of the box was removed, allowing the experimenter to
stimulate both hands. In the inside of the box a small cardboard marker indicated where the
tip of the subject’s index finger should be placed. A cardboard cover was placed on top of the
box. When the cover was removed, the participants saw the rubber hand; when the cover was
placed over the box, the participants were not able to see the rubber hand. Ruled lines were
drawn in the cover to allow participants to indicate the position of their index.
Each session was composed of six blocks: three RHI condition, and three CONTROL
conditions. In the RHI condition, the rubber hand and the participant’s hand were stroked
simultaneously and in synchrony. In the CONTROL condition the rubber hand was not
stroked. The CONTROL and RHI conditions were undertaken in an alternate order, half of
the participants began with the CONTROL condition and the other half with the RHI
condition.

14
Figure 1. Cardboard box. Participants could see the RH but not their real (left) hand.
Cardboard box roofed by the cover with the ruler on the top (right).
Each block began with the cover of the box closed, participants were asked to place their right
hand index finger on the cardboard marker inside the box.
Then, participants were asked to indicate the position of their right index finger by means of
the ruled lines marked on the top of the box. This measure was called pre-test proprioceptive
evaluation. Participants were requested not to move their hand throughout the duration of the
whole experimental block, particularly during the judgement of their index position.
Subsequently, participants were asked to attentively look at the rubber hand and the
temperature of their right hand was measured with an infrared thermometer. In the RHI
condition, the experimenter stroked the rubber and the participant’s right hand in a
synchronous manner. The stroking was delivered during two minutes using two identical
brushes. Subsequently, a modified peltier-type thermal stimulator was used to deliver the
warm and hot stimuli. One out of six temperatures (38° C, 40 °C, 42° C, 44° C, 46° C, 48° C)
was assigned for a given stimulus. The order of the temperatures was balanced between the
blocks. The stimulus was applied with the electrode on the dorsum of the right hand during 6
seconds. At the same time the rubber hand was “stimulated” with an electrode of the same
kind. After the thermal stimulation, participants were asked to evaluate the quality of the
stimulus: “warm” or “painful” and the intensity of the “warmness” and “painfulness” on a
subjective scale from 0 to 10, 0 being the minimum and 10 the maximum of either warmth or
pain. This procedure was repeated five more times in order to complete the six temperatures
(38° C, 40 °C, 42° C, 44° C, 46° C, 48° C), except now the duration of the stroking of the
remaining five trials lasted only one minute instead of two minutes in the first trial. When the
judgement of the last thermal stimulation was completed, the cover was placed over the box
and the participant was asked to indicate, using the ruled lines, the location of the felt pain.

15
The offset of the cover was changed randomly and the participant was then asked to judge the
position of the hidden index finger, measure that we called post-test proprioceptive evaluation
(Figure 2). Once the judgement of location of pain and the right index were finished,
participants were allowed to take their right hand out of the box. Participants were asked to
freely describe their experience and then they were asked to evaluate, using a scale from 0 to
10, ten statements (Figure 4) designed to estimate the degree to which they felt ownership of
the rubber hand. In the cases where participants’ hand temperature decreased or increased
more than 4° C away from the temperature that they had at the beginning of the block, we
heated up or cooled down their hand with hot water or a cold compress. There was no
manipulation of the participant’s hand temperature within the blocks.
In the CONTROL condition the same procedure was performed with the single difference that
the rubber hand wasn’t stroked.
Figure 2. General procedure. The sequence shown in the figure represents one experimental block. Each
block was composed of 6 trials, one trial for each temperature. The order of the temperatures was
balanced between each block. Each participant went through three CONTROL and three RHI blocks.
Here we show an example of a RHI block. The CONTROL block was identical except that the RH was not
stroked by the brush nor stimulated by the electrode.
16
2.3 Measurements
2.3.1 Proprioceptive drift
At the beginning of each block, participants were asked to indicate the position of their right
index finger using the ruler that was on the cover of box, this measure was called “pre-test
proprioceptive judgement”. The cover of box was larger than the box and numbers on the
ruled lines were placed in a random order so participants could not guide themselves by hints
of previous judgements. The number given by the participant was paired with a ruler that was
hidden to him that indicated the actual participant’s hand position. The position of the index
finger was counted as zero, positions toward the rubber hand counted as positive values and
positions away from the rubber hand as negative values. At the end of each block participants
were asked again to indicate the position of their right index finger in relation to the ruled
lines. The offset of the visible ruled lines was changed between each measurement. We called
this measure the “post-test proprioceptive judgement”. We called “proprioceptive drift” the
difference between the post-test and pre-test proprioceptive judgements.
2.3.2 Pain and heat intensity
After each heat stimulus, participants were asked if they felt pain. If the participants felt the
pain, they were asked to evaluate the pain on a scale from 0 to 10 (0 being the minimum and
10 the maximum) and the heat on a different scale from 0 to 10. If they did not feel pain, they
were asked to give a score 0 to pain and to evaluate the heat on a scale from 0 to 10.
Participants were allowed to build their own criteria of evaluation, but they were asked to
keep the same criteria throughout the all experiment.
2.3.3 Localisation of pain
After the last thermal stimulus of each block, the cover was placed over the box and
participants were asked to use the ruled lines to respond to the question “where did you feel
the pain?” The zero was taken at the place were the electrode was placed to give the heat
stimuli. Positions towards the rubber hand were taken as positive; positions away from the
rubber hand were taken as negative.
2.3.4 Questionnaire
In order to quantify and categorise the experience of participants relative to the RHI, at the
end of each block, they were asked to indicate their degree of agreement with ten statements
17
(Figure 4). Participants were asked to utilize a scale from 0 to 10, 0 being not agree at all, and
10 totally agree. The questionnaire was based on Botvinick and Cohen (1998) and Kammers
et al. (2009) but modified according to the specific issues addressed in the present study.
During our pilot experiments we had noted that the phenomenon of the RHI was experienced
differently according to the kind of stimuli that was given and the corresponding sensation
(tactile, heat, pain). Therefore in addition to the standard statement (statement 5) used in
previous studies to measure the RHI (Botvinick and Cohen 1998, Ramachandran 2003, and
M.P.M Kammers et al. 2009), we included three new statements that indicated the
phenomenon of the RHI related to each sensation (statements 6, 7 and 8).
Question 4 has no relationship with the RHI. We included it as a control expecting no effect
of the RHI over the responses to this statement.
Statement 1 points to the qualitative aspect of the rubber hand incorporation. Statements 2 and
3 try to elucidate the nature of the possible modifications in body representation that underlies
the RHI. In the study of Schütz-Bosbach et al. (2009), they ask the question of “how and to
what extent does the presence of the RHI alter the representation of the bodily self?” They
give three alternatives a) incorporation of an extra limb as an additional part of the body, b)
incorporation of the rubber hand as a tool (as would be the case for a walking stick) c) the
rubber hand displaces or substitutes the participant’s hand. Longo et al (2008) had also
suggested that one component of the experience of the RHI was “loss of own hand”,
suggesting that the rubber hand may in some sense displace the participant’s actual hand,
which is in line with the last alternative. Statements 2 and 3 correspond to alternatives a) and
c) respectively. Statements 9 and10 relate to the spatial location of the sensations of heat and
pain.
3 Results
A total of 21 healthy participants recruited from volunteer’s pool of the Ambroise Paré
Hospital took part in the psychophysical experiment (12 females and 9 males; aged 20-53
years). Participants’ results were retained if the variation of their hand temperature within
each block did not surpass 2°C. Two subjects were excluded.
18
3.1 Occurrence of the RHI
First of all we assessed whether under our experimental conditions the RHI was induced. In
order to answer this question, we looked at two measures; a) the proprioceptive drift, which is
the difference between the proprioceptive post-test evaluation and the proprioceptive pre-test
evaluation and b) subjective judgement, which is the level of agreement with the statements
linked to the experience of ownership of the RH.
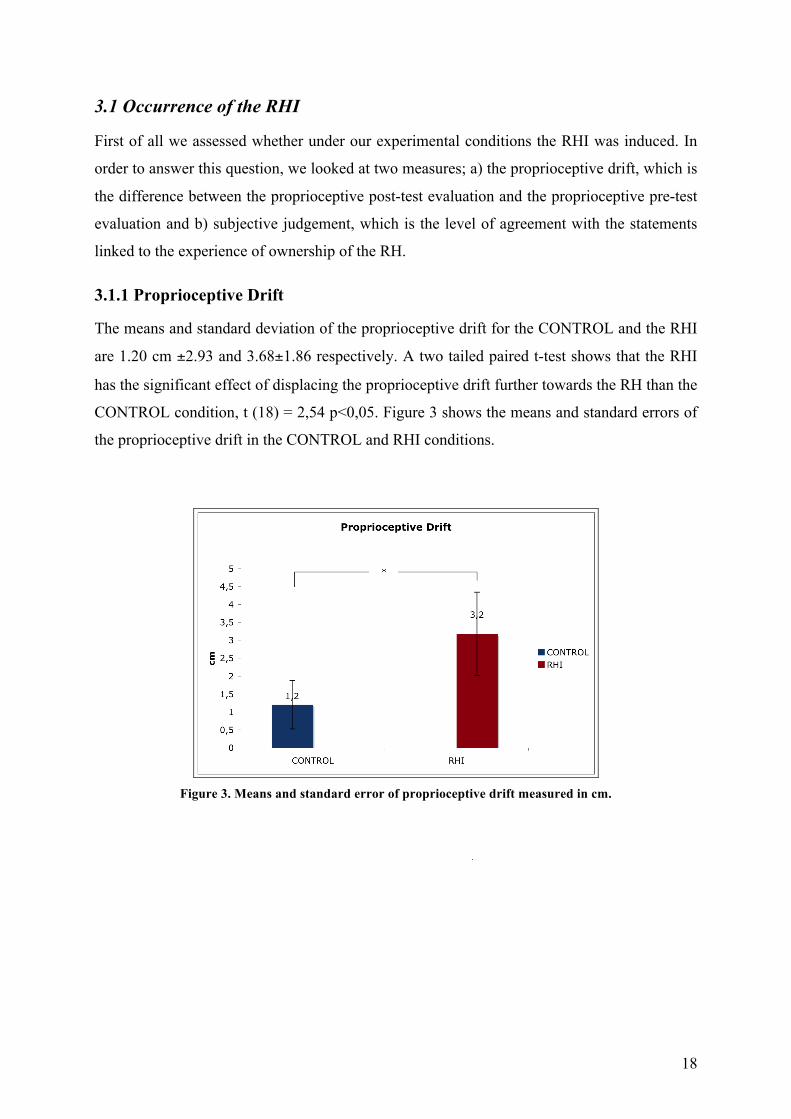
3.1.1 Proprioceptive Drift
The means and standard deviation of the proprioceptive drift for the CONTROL and the RHI
are 1.20 cm ±2.93 and 3.68±1.86 respectively. A two tailed paired t-test shows that the RHI
has the significant effect of displacing the proprioceptive drift further towards the RH than the
CONTROL condition, t (18) = 2,54 p<0,05. Figure 3 shows the means and standard errors of
the proprioceptive drift in the CONTROL and RHI conditions.
Figure 3. Means and standard error of proprioceptive drift measured in cm.
19
3.1.2 Questionnaire
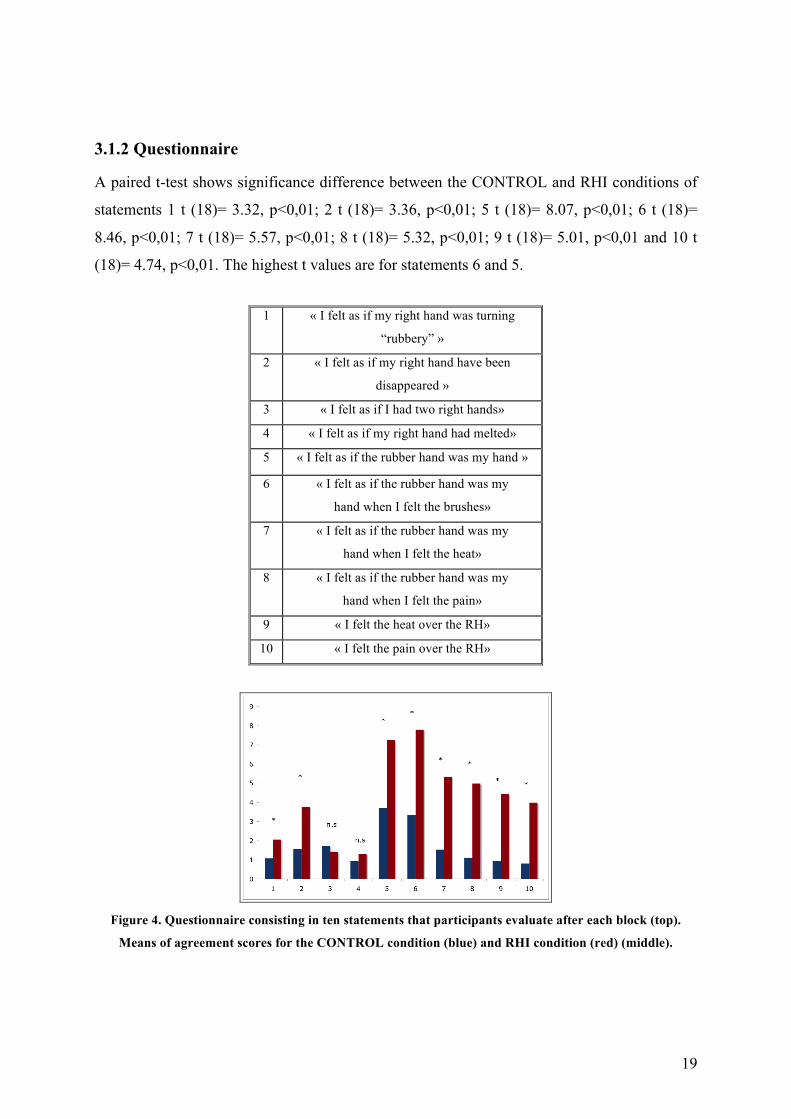
A paired t-test shows significance difference between the CONTROL and RHI conditions of
statements 1 t (18)= 3.32, p<0,01; 2 t (18)= 3.36, p<0,01; 5 t (18)= 8.07, p<0,01; 6 t (18)=
8.46, p<0,01; 7 t (18)= 5.57, p<0,01; 8 t (18)= 5.32, p<0,01; 9 t (18)= 5.01, p<0,01 and 10 t
(18)= 4.74, p<0,01. The highest t values are for statements 6 and 5.
1 « I felt as if my right hand was turning
“rubbery” »
2 « I felt as if my right hand have been
disappeared »
3 « I felt as if I had two right hands»
4 « I felt as if my right hand had melted»
5 « I felt as if the rubber hand was my hand »
6 « I felt as if the rubber hand was my
hand when I felt the brushes»
7 « I felt as if the rubber hand was my
hand when I felt the heat»
8 « I felt as if the rubber hand was my
hand when I felt the pain»
9 « I felt the heat over the RH»
10 « I felt the pain over the RH»
Figure 4. Questionnaire consisting in ten statements that participants evaluate after each block (top).
Means of agreement scores for the CONTROL condition (blue) and RHI condition (red) (middle).
20
3.2 Perception of pain
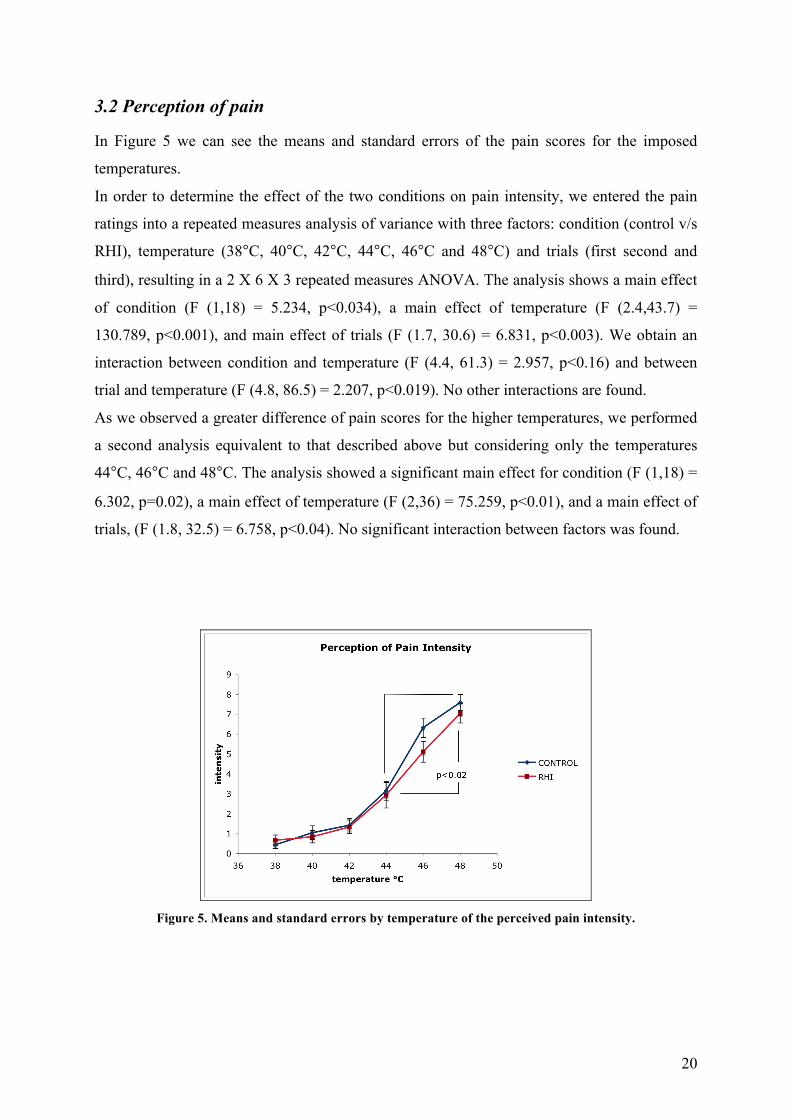
In Figure 5 we can see the means and standard errors of the pain scores for the imposed
temperatures.
In order to determine the effect of the two conditions on pain intensity, we entered the pain
ratings into a repeated measures analysis of variance with three factors: condition (control v/s
RHI), temperature (38°C, 40°C, 42°C, 44°C, 46°C and 48°C) and trials (first second and
third), resulting in a 2 X 6 X 3 repeated measures ANOVA. The analysis shows a main effect
of condition (F (1,18) = 5.234, p<0.034), a main effect of temperature (F (2.4,43.7) =
130.789, p<0.001), and main effect of trials (F (1.7, 30.6) = 6.831, p<0.003). We obtain an
interaction between condition and temperature (F (4.4, 61.3) = 2.957, p<0.16) and between
trial and temperature (F (4.8, 86.5) = 2.207, p<0.019). No other interactions are found.
As we observed a greater difference of pain scores for the higher temperatures, we performed
a second analysis equivalent to that described above but considering only the temperatures
44°C, 46°C and 48°C. The analysis showed a significant main effect for condition (F (1,18) =
6.302, p=0.02), a main effect of temperature (F (2,36) = 75.259, p<0.01), and a main effect of
trials, (F (1.8, 32.5) = 6.758, p<0.04). No significant interaction between factors was found.
Figure 5. Means and standard errors by temperature of the perceived pain intensity.
21
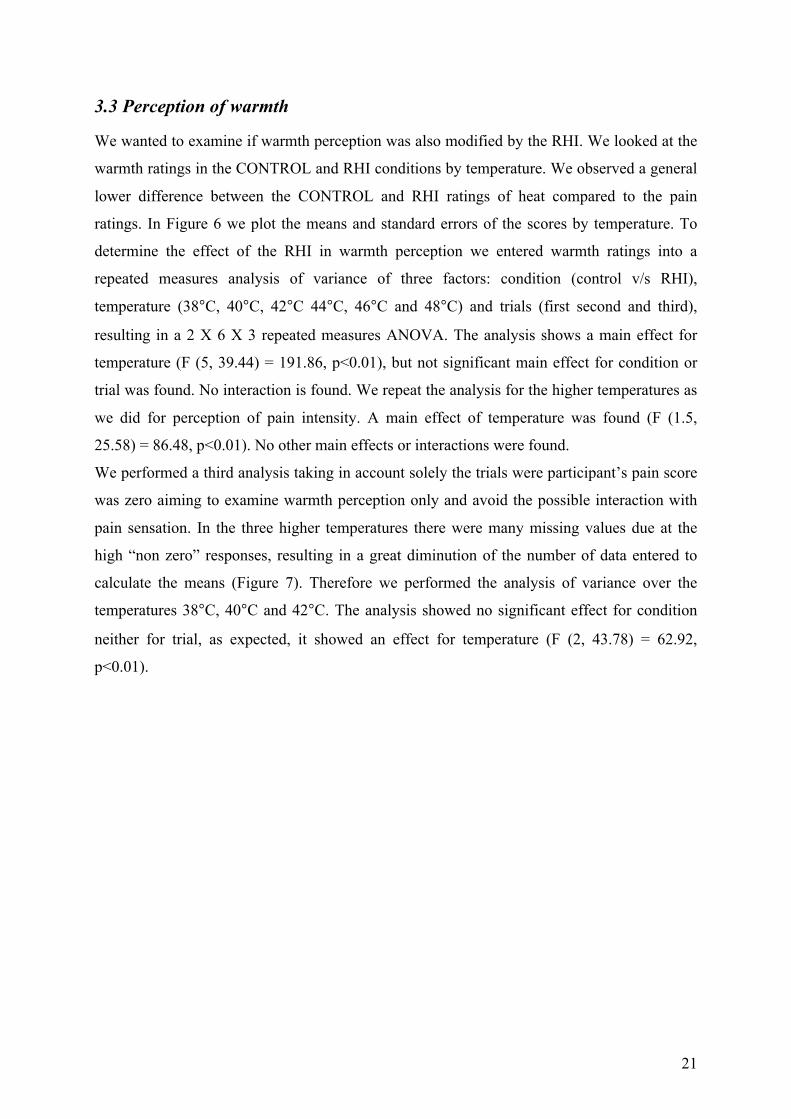
3.3 Perception of warmth
We wanted to examine if warmth perception was also modified by the RHI. We looked at the
warmth ratings in the CONTROL and RHI conditions by temperature. We observed a general
lower difference between the CONTROL and RHI ratings of heat compared to the pain
ratings. In Figure 6 we plot the means and standard errors of the scores by temperature. To
determine the effect of the RHI in warmth perception we entered warmth ratings into a
repeated measures analysis of variance of three factors: condition (control v/s RHI),
temperature (38°C, 40°C, 42°C 44°C, 46°C and 48°C) and trials (first second and third),
resulting in a 2 X 6 X 3 repeated measures ANOVA. The analysis shows a main effect for
temperature (F (5, 39.44) = 191.86, p<0.01), but not significant main effect for condition or
trial was found. No interaction is found. We repeat the analysis for the higher temperatures as
we did for perception of pain intensity. A main effect of temperature was found (F (1.5,
25.58) = 86.48, p<0.01). No other main effects or interactions were found.
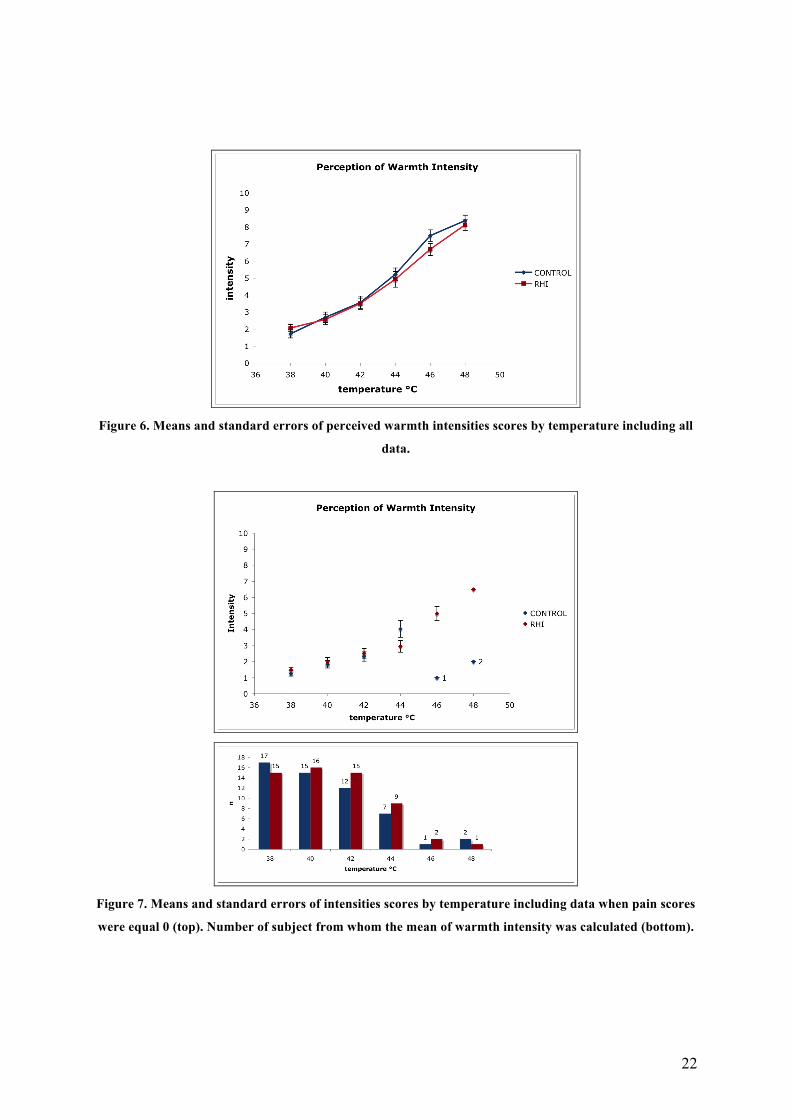
We performed a third analysis taking in account solely the trials were participant’s pain score
was zero aiming to examine warmth perception only and avoid the possible interaction with
pain sensation. In the three higher temperatures there were many missing values due at the
high “non zero” responses, resulting in a great diminution of the number of data entered to
calculate the means (Figure 7). Therefore we performed the analysis of variance over the
temperatures 38°C, 40°C and 42°C. The analysis showed no significant effect for condition
neither for trial, as expected, it showed an effect for temperature (F (2, 43.78) = 62.92,
p<0.01).
22
Figure 6. Means and standard errors of perceived warmth intensities scores by temperature including all
data.
Figure 7. Means and standard errors of intensities scores by temperature including data when pain scores
were equal 0 (top). Number of subject from whom the mean of warmth intensity was calculated (bottom).
23
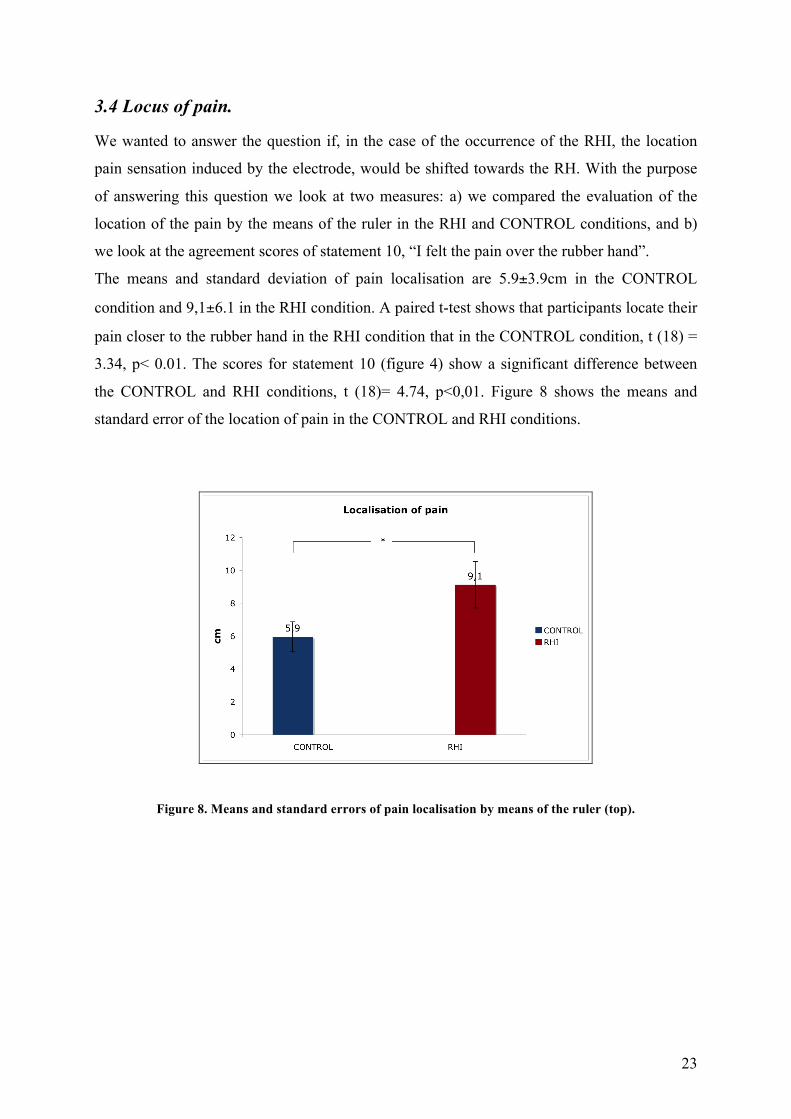
3.4 Locus of pain.
We wanted to answer the question if, in the case of the occurrence of the RHI, the location
pain sensation induced by the electrode, would be shifted towards the RH. With the purpose
of answering this question we look at two measures: a) we compared the evaluation of the
location of the pain by the means of the ruler in the RHI and CONTROL conditions, and b)
we look at the agreement scores of statement 10, “I felt the pain over the rubber hand”.
The means and standard deviation of pain localisation are 5.9±3.9cm in the CONTROL
condition and 9,1±6.1 in the RHI condition. A paired t-test shows that participants locate their
pain closer to the rubber hand in the RHI condition that in the CONTROL condition, t (18) =
3.34, p< 0.01. The scores for statement 10 (figure 4) show a significant difference between
the CONTROL and RHI conditions, t (18)= 4.74, p<0,01. Figure 8 shows the means and
standard error of the location of pain in the CONTROL and RHI conditions.
Figure 8. Means and standard errors of pain localisation by means of the ruler (top).
24
4 Discussion
4.1 Proprioceptive drift
In this study we found a significant difference between the proprioceptive drifts in the
CONTROL and RHI conditions, showing a stronger bias towards the RH in the RHI
condition. This result confirms previous findings and suggests that the RHI was
effective in the RHI condition.
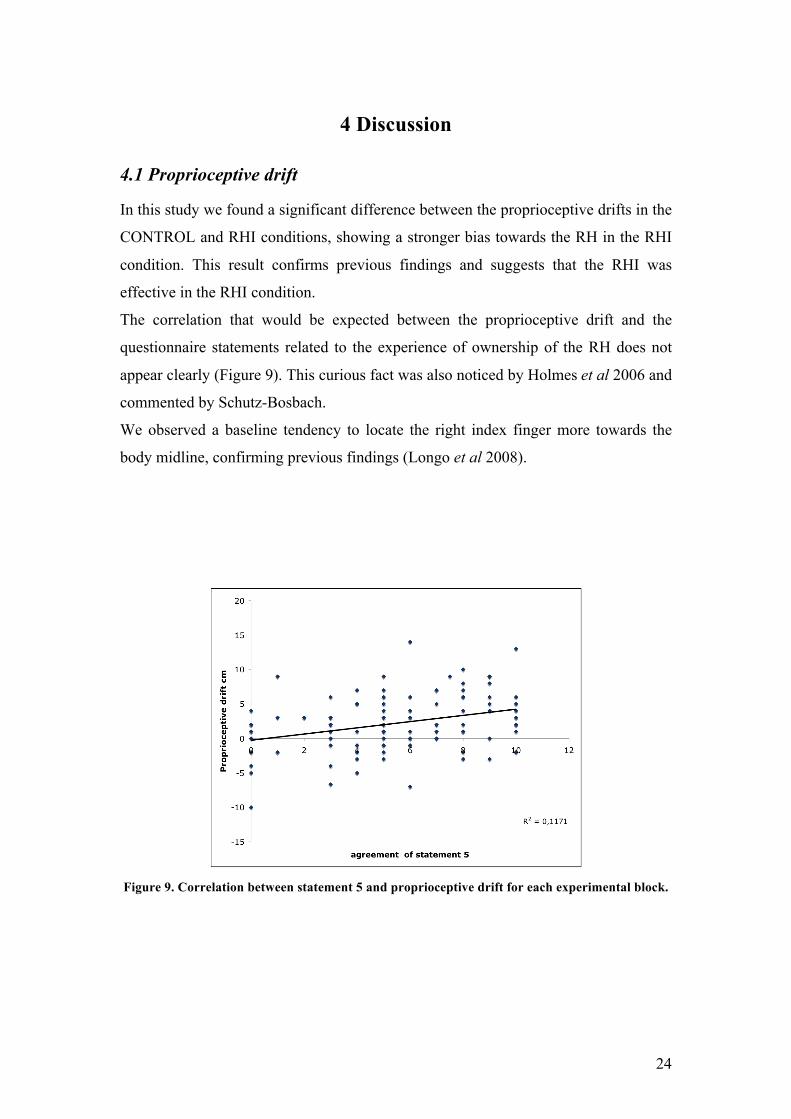
The correlation that would be expected between the proprioceptive drift and the
questionnaire statements related to the experience of ownership of the RH does not
appear clearly (Figure 9). This curious fact was also noticed by Holmes et al 2006 and
commented by Schutz-Bosbach.
We observed a baseline tendency to locate the right index finger more towards the
body midline, confirming previous findings (Longo et al 2008).
Figure 9. Correlation between statement 5 and proprioceptive drift for each experimental block.
25
4.2 Questionnaire
The questionnaire was intended to evaluate participants' general experience of
ownership of the rubber hand, and also to verify whether that experience differed
while feeling the sensations of warmth and pain.
Statements 2 and 3 were included to consider the nature of the possible modifications
in body representation produced by the RHI. They assess two of the three possibilities
(see procedure) proposed by S. Schütz-Bosbach et al (2009): Statement 2 referred to
the possibility that the rubber hand displaced or substituted the participant’s own hand
and statement 3 concerned the option of incorporation of the rubber hand as an extra
limb.
However it became clear that statement 2 (« I felt as if my right hand has disappeared
») did not in fact assess what had been aimed for: it is not the same to feel that our
hand has been replaced and to feel that it has disappeared. Some participants reported
that this question was confusing: they felt that their real hand had somehow been
taken over by the RH, but they did not feel that their hand had “disappeared”.
Consequently, the results of this statement did not allow us to answer the question that
we had intended.
Statement 3 (« I felt as if I had two right hands») assessed more directly the option
that the possible modifications in body representation caused by the RHI included the
experience of incorporating the rubber hand as an extra limb. The results indicate that
the RH did not have an effect on the participants' response to this statement. We are
inclined to think that it is not this kind of modification that is in place during the
illusion.
Statement 4 (« I felt as if my right hand had melted») is not related to the experience
of ownership of the RH; we included it as a control statement. The fact that we do not
observe an effect of the RHI on the response to this question confirms that the
experience of participants under the RHI condition involved a specific
phenomenology that was linked to the sense of body-ownership and not to qualitative
changes of their hand.
We included statement 5 « I felt as if the rubber hand was my hand » as a direct
indicator of the RHI. Several studies have used this statement to indicate the
experience of body-ownership of the RH. (Botvinick and Cohen 1998, Ramachandran
et al, 2003, Longo et al 2008, Kammers et al. 2009). In addition, as we described in
26
the procedures, we included three statements that referred to the experience of
ownership of the RH, in relation to the types of sensation that our stimuli evoked:
tactile evoked by stroking during induction, warmth and pain evoked by electrode
stimulation during the test phase (statements 6, 7 and 8). The mean score obtained for
the statement referring to tactile stroking stimulation (statement 6) was higher than
those referring to the warmth and painful sensations (statements 7 and 8). The
difference of scores between statements 7 and 8 was not significant. These findings
suggest that the RHI was experienced differently during the tactile stimulation during
induction compared to the stimulation causing the warmth and pain sensations during
the test phase. It is yet to be determined if this was due to the type of the sensations
themselves or to the way the stimulation was applied: the thermal stimulation did not
have the spatial and temporal richness of the tactile stimuli, it lasted 6 seconds and it
was always applied on the same part of the hand. Nevertheless, we observed a big
difference between the CONTROL and the RHI for statements 7 and 8 evaluating the
presence of the RHI while feeling warmth and pain. Importantly for this study, this
suggests that the experience of the RHI was maintained while participants felt pain.
Statements 9 and 10 refer to the localisation of the felt warmth and pain. They show
significantly higher values in the RHI compared to the CONTROL condition,
confirming that during the thermal stimulations the RHI was maintained. They
suggest that the RHI had the effect of relocating the sensations of warmth and pain
towards the RH.
The questionnaire allowed us to obtain a quantifiable measure of certain specific
aspects of participants’ experience in relation to the two different conditions that our
experiment included. Nonetheless, the questionnaire imposes the response to certain
specific statements and that fact impoverishes the potential of participants' accounts,
does not allow participants to give a detailed and precise account of their experience
neither does it allow the experimenter to uncover possible experiential aspects that the
questionnaire does not probe. In order to understand the phenomenological
counterpart of the RHI and of the RHI while feeling pain, it would be very interesting
to find a method that allows us to access the qualitative aspects and structure of
participants' experience. Longo et al 2008 attempted to tackle this issue by proposing
a psychometric approach to introspective reports of the RHI. They used a Likert scale
to rate participants' agreement with 27 statements relating to the subjective experience
of the illusion and used principal component analysis to investigate the latent
27
structure of participants' experience. They found that in fact, a systematic and
measurable structure emerge in the experience of the RHI. However their method is
still based on preset statements, and may not reveal certain interesting aspects of their
experience.
An interesting possibility would be to use first person methods to gather and analyse
the structure of this experience. Such methods provide interview and analysis
techniques. The interview is designed to guide the process of introspection aiming to
seize the structure of a given experience (Petitmengin 2006, Vermersch 2003). The
further analysis of the interview allows to identify the components, which characterise
an individual experience, as well as to assess the similarities between individuals.
This could be especially relevant to the domain of pain research. As Price (2002)
remarks “Understanding the nature of pain at least partly depends on recognizing its
inherent first person epistemology and on using a first person experiential and third
person experimental approach to study it. This approach may help to understand some
of the neural mechanisms of pain and consciousness by integrating experiential
phenomenological methods with those of neuroscience”.
4.3 Perception of pain intensity
The results of this study confirm our hypothesis: the RHI decreases participants’
estimation of pain. To our knowledge this is the first evidence of such a phenomenon.
The fact that participants' estimation of pain intensity is significantly affected just for
higher temperatures, confirms the specificity of this effect for pain and not for warmth
sensation. Even if participants assigned non-zero pain scores for temperatures ranging
between 38°C and 44°C, it should be mentioned that it seemed to me that only at
46°C and 48°C did the subjects show a visible behaviour of feeling pain and scored
the pain sensation higher.
The main result of our study is in line with the hypothesis that the RHI implies a
“replacement” of the real hand by the RH. As mentioned in the introduction, Moseley
suggests that this phenomenon of replacement explains the decrease of participants’
hand temperature and the decrease in their temporal discrimination of tactile stimuli
while experiencing the RHI. In addition, in the study of Longo et al (2008), the
28
authors find that one of four major components of the subjective experience during
the RHI is the “loss of own hand”.
It is not easy to conjecture what mechanisms explain the relation between the RHI
and pain perception; pain perception is a multidimensional experience, pain-
modulating mechanisms are manifold and complex.
We can imagine two possible mechanisms that would explain the relationship
between the RHI and the decrease in the perceived pain. One possibility is that multi-
sensorial correlation itself relates to pain modulation processes. The second option is
that the experience of body-ownership itself, meaning having the feeling that the RH
belongs to our body and “replaces” our real hand, relates to pain modulation
processes. We could imagine that having the impression of going away from a source
of pain, having the feeling that one’s hand is actually somewhere else and not next to
the source of pain: would induce a decrease of intensity of the perceived sensation.
A possible way to test the first, more sensory, hypothesis is to use one of the control
conditions from Moseley et al 2008. They proved that it was not the mere multi-
sensory correlation that caused the temperature decrease of the real hidden hand, by
measuring participants' hand temperature while they were looking at their real hand
when stroked: in this condition, although a multi-sensory correlation was present, no
temperature decrease was found.
To test the second hypothesis, we could include a control condition where we
measure the estimation of pain of a body part that is not involved in the illusion. If the
decrease of pain estimation found in our experiment is due to the experience of body-
ownership of the rubber hand, we should not find an effect of the RHI on pain
estimation in that body part: the effect should be specific to the real hand involved in
the ownership transfer.
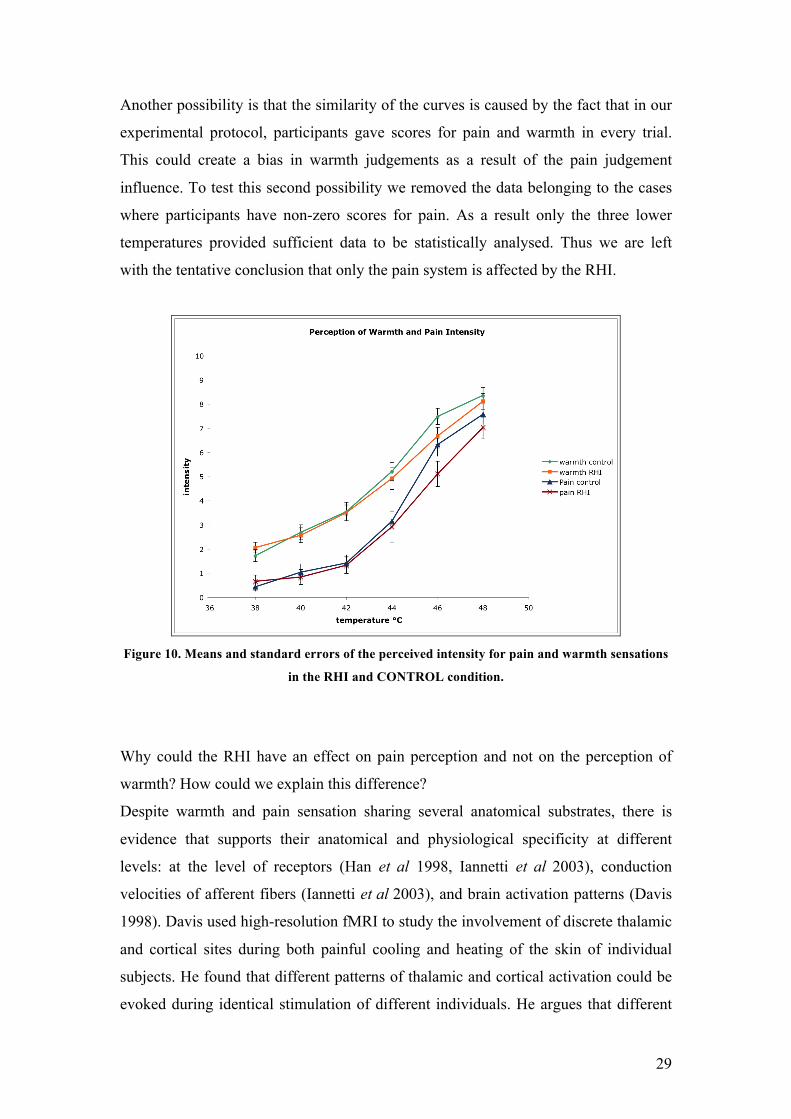
4.4 Perception of warmth intensity
Our result shows that the intensity of warmth sensation is not significantly modified
by the RHI. Nevertheless the similarity of the sets of curves for pain and warmth
(figure 10) makes this conclusion rather tentative. It might be that we don't find a
significant difference for lack of statistical power.
29
Another possibility is that the similarity of the curves is caused by the fact that in our
experimental protocol, participants gave scores for pain and warmth in every trial.
This could create a bias in warmth judgements as a result of the pain judgement
influence. To test this second possibility we removed the data belonging to the cases
where participants have non-zero scores for pain. As a result only the three lower
temperatures provided sufficient data to be statistically analysed. Thus we are left
with the tentative conclusion that only the pain system is affected by the RHI.
Figure 10. Means and standard errors of the perceived intensity for pain and warmth sensations
in the RHI and CONTROL condition.
Why could the RHI have an effect on pain perception and not on the perception of
warmth? How could we explain this difference?
Despite warmth and pain sensation sharing several anatomical substrates, there is
evidence that supports their anatomical and physiological specificity at different
levels: at the level of receptors (Han et al 1998, Iannetti et al 2003), conduction
velocities of afferent fibers (Iannetti et al 2003), and brain activation patterns (Davis
1998). Davis used high-resolution fMRI to study the involvement of discrete thalamic
and cortical sites during both painful cooling and heating of the skin of individual
subjects. He found that different patterns of thalamic and cortical activation could be
evoked during identical stimulation of different individuals. He argues that different
30
pain and temperature-related activations may help us to understand the complexities
of these sensory experiences and differences in human reports of pain and
temperature.
It could be that these anatomical, physiological and subjective differences between
warmth and pain sensation explain the difference that we observe between warmth
and pain sensations and their relationship with the sense of body-ownership.
If we understand pain sensation as a homeostatic indicator of the body/organism
integrity (Craig 2002, Melzack 1990), we could suppose that the experience of
owning a body is linked to perception of harm to that body. If we design an
experiment where we alter the sense of owning a part of this body, inducing
ownership for an external object and somehow a “disownership” of our own body
part, we could suppose that the perception of harm on this body part would be
modified. As warmth sensation might not be linked to a “guarding” self-integrity
mechanism, it might not be affected when altering the sense of ownership of our
body.
The possible ambiguity created by the fact that in our experimental protocol
participants gave scores for pain and warmth in every trial, could be solved in a future
protocol, by creating instead of two scales: one scale from 0 to 10 with five indicating
the beginning of pain sensation. In this way we could observe the effect of the RHI
along a continuum from warmth sensation to pain sensation.
4.5 Localisation of pain
Our results show that participants perceived that pain position was shifted towards the
rubber hand. The shift in the RHI condition was greater than in the CONTROL
condition and this difference was significant. These results mirror those obtained for
the proprioceptive drift: a baseline drift towards the rubber hand that is significantly
increased in the RHI condition. This result suggests that the illusion continued while
participants felt the pain, and confirms our hypothesis: participants experiencing the
RHI displace their felt pain towards the RH.
However, our results show greater drift towards the rubber hand in pain localisation
than in proprioceptive judgement and also a greater variance (see results and figures 2
and 7). This could be explained if we consider the following factors:
31
1. To determine the proprioceptive drift we asked participants: where is your index
finger in relation to a ruler? On the other hand, in order to judge pain localisation
participants were asked: where did you feel the pain in relation to the ruler? This
temporal difference between the two tasks adds an extra aspect related to
remembering; it could have an effect on the variance of the responses. This is
supported by participants’ reports. Some participants expressed that they felt
uncertain about localisation because they had to remember and recall the position of
the felt pain.
2. In the case of the proprioceptive drift, Subjects' index finger was always resting on
a little piece of cardboard, which, at the moment of judging about location, could
serve as a fairly precise indicator. On the contrary, when localising pain, the electrode
was no longer in contact with their hand; there was no reference that could be used.
This may also have affected the variance of participants’ responses.
3. In addition, the source corresponding to the proprioceptive sensation was smaller,
since it was constituted by the index finger, which had limited width. On the other
hand, the electrode was (how much?) wide, and covered a larger area of the hand.
This could in part explain the difference between pain position and proprioceptive
drift and their variability.
A protocol that considers these factors could allow us to uncover the cause of the
greater shift in pain localisation compared to proprioceptive drift.
32
4.6 Methodological Remarks
The method of thermal stimulation was decided in collaboration with Dr. Didier
Bouhassira, a specialist of pain treatment. In the process of designing the protocol of
the experiment we studied three possible methods to measure pain: a) Thermal
stimulation via Peltier electrode, b) Mechanical stimulation via Von Frey Filaments,
and c) Electrical stimulation measuring the RIII reflex.
Mechanical stimulation was discarded because the intensity of the mechanical
sensation is determined by the diameters of the filaments. The difference in diameters
could bias participant response: on one side, by confounding the filament diameter
with the elicited pain, and on the other side, the different diameters could serve as
indicator of stimulus identity. In addition, the sensation elicited by such filaments is
painful for patients suffering from pain-related pathologies, but is quite mild for
healthy subjects.
The RIII method seemed quite attractive to us since it gives an objective measure, the
electrical activity of the biceps femoris muscle, which correlates with participants’
perceived pain. Nonetheless, we have chose the thermal stimulation method as we
were interested in comparing the behaviour of warmth and pain perception in relation
to the RHI; this method is reliable, has been widely used in previous studies of pain
perception and corresponded to equipment availability constraint.
In choosing this method, we were particularly concerned with the measurement
aspect. Considering the results of Moseley showing that the RHI lowers hand
temperature, we wondered whether this decrease in skin temperature might introduce
a bias in pain perception. It could be that the reduction in skin temperature increases
or lowers the sensitivity to pain. This might mask or enhance any possible result,
complicating the analysis and interpretation of the data. However, the decreases of
temperature found by Moseley are quite small, ranging around 0.25 °C, on the other
hand, the temperature discrimination capabilities of normal individuals are around
2°C. We considered that this difference between scales would avoid possible
interactions. In addition, there is evidence that suggests that perceived intensity of
peripheral thermal stimuli is independent of internal body temperature (Mower 1976).
To control the possible effect of hand temperature in pain perception, we recorded
participants’ hand temperature between each trial and we controlled for it to be stable

33
throughout the experiment. We observed no relationship between participants’ hand
temperature and pain perception.
5 Conclusion
Our purpose in this study was to investigate the effect of changing perceived body-
ownership on the intensity and localisation of thermal pain sensations. By using the
protocol of the Rubber Hand Illusion and a method of administering thermal pain, we
showed that participants’ estimation of pain decreases on their own hand when they
feel ownership of a fake rubber hand. Pain sensation is also localised closer to the
rubber hand. On the other hand, no significant effect of body-ownership is observed
on estimation of warmth sensations.
These results suggest a specific relationship between the sense of body-ownership and
pain perception. From a neurophysiological point of view, the results are in line with
evidence that shows that the experience of body-ownership affects physiological
parameters associated with the homeostatic equilibrium of the body. This suggests the
existence of interactions between conscious processes, such as the experience of
ownership, and unconscious processes, such as the modulation of pain perception.
However, the mechanism that could explain the relationship between the experience
of body-ownership and the modulation of pain perception is still unclear. Also unclear
is the mechanism that explains the difference of the effect of the RHI on warmth and
pain sensations.
It would be interesting to investigate if the effect found on thermal pain extends also
to other kinds of pain: pain elicited by pressure or pain elicited by electric stimulation
for example. If this turned out to be true, this opens the road to possible uses of the
rubber hand illusion in clinical pain treatment.
34
References
Armel, K. C., & Ramachandran, V. S. (2003). Projecting sensations to external objects: Evidence from skin conductance response. Proceedings of the Royal Society of London B, 270, 1499–1506.
Botvinick, M., & Cohen, J. (1998). Rubber hands ‘feel’ touch that eyes see. Nature, 391, 756.
Costantini, M., & Haggard, P. (2007). The rubber hand illusion: Sensitivity and reference frame for body ownership. Consciousness and Cognition, 16, 229–240.
Craig A.D. How do you feel? Interoception The sense of the physiological condition of the body. Nature Reviews Neuroscience 2002, 3: 655–666.
Davis Karen D., Kwan Chun L., Crawley Adrian P. and Mikulis David J. (1998). J Neurophysiology, 80, 1533-1546.
De Vignemont, F. (2007). Habeas Corpus: The Sense of Ownership of One ’ s Own Body. Mind and Language, 427-449.
Durgin, F. H., Evans, L., Dunphy, N., Klostermann, S., & Simmons, K. (2007). Rubber hands feel the touch of light. Psychological Science, 18, 152–157.
Ehrsson, H. H., Holmes, N. P., & Passingham, R. E. (2005). Touching a rubber hand: Feeling of body ownership is associated with activity in multisensory brain areas. Journal of Neuroscience, 25, 10564–10573.
Ehrsson, H. H., Spence, C., & Passingham, R. E. (2004). That’s my hand! Activity in premotor cortex reflects feeling of ownership of a limb. Science, 305, 875–877.
Ehrsson, H. H., Wiech, K., Weiskopf, N., Dolan, R. J., & Passingham, R. E. (2007). Threatening a rubber hand that you feel is yours elicits a cortical anxiety response. Proceedings of the National Academy of Sciences, USA, 104, 9828–9833.
Farnè, A., Pavani, F., Meneghello, F., & Làdavas, E. (2000). Left tactile extinction following visual stimulation of a rubber hand. Brain, 123, 2350–2360.
Gallagher S. Philosophical conceptions of the self: implications for cognitive science. Trends in Cognitive Science 2000, 4:14-21.
Graziano, M. S., Cook, D. F., & Taylor, C. S. (2000). Coding the location of the arm by sight. Science, 290, 1782–1786.
Han Z.S., Zhang E.T. and Craig A. D. (1998). Nociceptive and thermoreceptive lamina I neurons are anatomically distinct Nature Neuroscience, 1, 218-225.
Holmes N. P. and Spence C. (2005) Visual bias of unseen hand position with a mirror: spatial and temporal factors. Exp Brain Research, 166, 489–497.
Holmes, N. P., Snijders, H. J., & Spence, C. (2006). Reaching with alien limbs: Visual exposure to prosthetic hands in a mirror biases proprioception without accompanying illusions of ownership. Perception and Psychophysics, 68, 685–701.
Holmes, N. P., & Spence, C. (2007). Dissociating body image and body schema with rubber hands. Behavioral and Brain Sciences, 30(2), 211–212.
Iannetti G.D., Truini A., Romaniello A., Galeotti F., Rizzo C., Manfredi M. and Cruccu G. (2003). Evidence of a Specific Spinal Pathway for the Sense of Warmth in Humans J Neurophysiology 89:562-570.
35
Kammers, M. P. M., De Vignemont, F., Verhagen, L., & Dijkerman, H. C. (2009). The rubber hand illusion in action. Neuropsychologia, 47(1), 204–211.
Longo, M. R., Schüür, F., Kammers, M. P. M., Tsakiris, M., & Haggard, P. (2008). What is embodiment? A psychometric approach. Cognition, 107, 978–998.
Makin, T. R., Holmes, N. P., & Ehrsson, H. H. (2008). On the other hand: Dummy hands and peripersonal space. Behavioural Brain Research, 191(1), 1–10.
Maravita, A., & Iriki, A. (2004). Tools for the body (Schema). Trends in Cognitive Science, 8, 79–86.
McGonigle, D., Hänninen, R., Salenius, S., Hari, R., Frackowiak, R. S., & Frith, C. D. (2002). Whose arm is it anyway? An fMRI case study of supernumerary phantom limb. Brain, 125, 1265–1274.
Moseley, G. L., Olthoff, N., Venema, A., et al. (2008). Psychologically cooling of a specific body part caused by the illusory ownership of an artificial counterpart. PNAS, 105(35), 13169–13173.
Pavani, F., Spence, C., & Driver, J. (2000). Visual capture of touch: Out-of-the-body experiences with rubber gloves. Psychological Science, 11, 353–359.
Press, C., Heyes, C., Haggard, P., & Eimer, M. (2008). Visuotactile learning and body representation: An ERP study with rubber hands and rubber objects. Journal of Cognitive Neuroscience, 20, 312–323.
Rorden, C., Heutink, J., Greenfield, E., & Robertson, I. H. (1999). When a rubber hand ‘feels’ what the real hand cannot. NeuroReport, 10, 135–138.
Tsakiris, M., & Haggard, P. (2005). The rubber hand illusion revisited: Visuotactile integration and self-attribution. Journal of Experimental Psychology: Human Perception and Performance, 31, 80–91.
Tsakiris, M., Hesse, M. D., Boy, C., Haggard, P., & Fink, G. R. (2007). Neural signatures of body ownership: A sensory network for bodily self-consciousness. Cerebral Cortex, 17, 2235–2244.
Tsakiris, M., Prabhu, G., & Haggard, P. (2006). Having a body versus moving your body: How agency structures body-ownership. Consciousness and Cognition, 15, 423–432.
Walton, M., & Spence, C. (2004). Cross-modal congruency and visual capture in a visual elevation discrimination task. Experimental Brain Research, 154, 113–120.
Schutz-Bosbach, S., Tausche, P., Weiss, C. (2009). Roughness perception during the rubber hand illusion. Brain and Cognition, 70, 136-144.

36





























