-
42 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 18, NO. 1, FEBRUARY
2003
PAT: A Power Analysis Toolbox forMATLAB/Simulink
Karl Schoder, Amer Hasanovic, Ali Feliachi, Senior Member, IEEE,
and Azra Hasanovic
AbstractA power system simulation environment inMATLAB/Simulink
is presented in this paper. The developedpower analysis toolbox
(PAT) is a very flexible and modular toolfor load flow, transient,
and small-signal analysis of electric powersystems. Standard power
system component models and a widerange of flexible ac transmission
systems (FACTS) devices areincluded. Its data structure and block
library have been tested toconfirm its applicability to
small-to-medium-sized power systems.Its advantages over an existing
commercial package are given.
Index TermsMATLAB, PAT, simulation, Simulink,
transientstability.
I. INTRODUCTION
WITH THE RECENT deregulation and increase in thedemand,
maintaining the power system stability is be-coming evermore
difficult. In order to operate power systemseffectively, without
reduction in the system security and qualityof supply, even in the
case of contingency conditions such asloss of transmission lines
and/or generating units, which willmost probably occur at a higher
frequency under deregulationand/or restructuring, new control
strategies need to be imple-mented. New equipment and control
devices, such as flexibleac transmission systems (FACTS) [1], are
sought to enhancestability and reliability of the system. Also,
neural networks,fuzzy logic, and other soft computing technologies
are increas-ingly used to answer control challenges. Before
implementingany novel technology, it is essential to validate these
new con-trol schema through simulation within an environment that
al-lows accurate modeling of all power systems components.
Thisenvironment also has to be modular enough to allow
frequentadditions of new components without compromising the
overallspeed of simulation or its accuracy.
Traditional tools for power system simulation such as PSS/E[2],
Eurostag [3], and PSAPAC [4], require coding in conven-tional
programming languages and are optimized for speed andefficiency.
However, implementation of new components, espe-cially soft
computing ones, within these packages can be verydifficult and
error prone.
In the last decade, MATLAB [5] became, de facto, thestandard
tool for flexible technical computing. MATLAB
Manuscript received September 26, 2001; revised April 18, 2002.
This workwas supported by the National Science Foundation under
Grant ECS-9870041and a DOE/EPSCoR WV state Implementation
Award.
K. Schoder, Am. Hasanovic, and A. Feliachi are with the Lane
Departmentof Computer Science and Electrical Engineering, West
Virginia University,Morgantown, 26506-6109 USA.
A. Hasanovic is with American Electric Power, Columbus, OH,
43230 USA.Digital Object Identifier 10.1109/TPWRS.2002.807117
incorporates a large number of domain specific toolboxes suchas
fuzzy logic toolbox, neural network toolbox, control
toolbox,real-time workshop, etc., and Simulink [6], an interactive
toolfor modeling, simulating, and analyzing dynamic
systems.Simulink offers a set of tools that can be used to build
systemsfrom the library of built-in blocks. It also allows
creationof custom blocks that can incorporate C/C++, Fortran,
orMATLAB code. These features make MATLAB/Simulink anattractive
choice for power systems-related research.
A number of papers addressed the issue of power system
sim-ulation in MATLAB/Simulink. Using the real-time workshop,the
authors in [7] have demonstrated real-time simulation of
afour-machine power system in the Simulink environment.
Mah-seredjian and Alvarado have developed MatEMTP [8], a setof
m-files that can perform Electromagnetic Transient
Program(EMTP)-type simulations in the MATLAB environment. In
[9],Allen et al. described an object-oriented approach. The
problemwith this approach is that Simulink was not designed to
handlenoncausal modeling (i.e., model ports in Simulink must have
ei-ther output or input role specified). If these ports are
connectedin an object-oriented fashion, algebraic loops are created
withinthe model. The current Simulink solvers resolve algebraic
loopsiteratively, decreasing the speed of simulation while having
anegative impact on simulation stability. These limitations
makethis approach impractical for larger systems.
There exist two commercial toolboxes that allow powersystem
simulation in MATLAB, namely the power systemtoolbox [10] (PST) and
power system blockset [11]. The lattertargets the three-phase power
system simulation and, therefore,is not appropriate for large-scale
transient stability analysis. ThePST is a set of MATLAB m-files
that can be used to performpower flow and stability studies. PST
does not offer graphicaluser interface (GUI) and cannot be used
within the Simulinkenvironment; addition of new components is time
consumingand requires a good understanding of the toolboxs
internalstructure. PST provides a single predictor-corrector solver
thatsupports vectorized computation. However, Simulink offers
12continuous time-domain solvers that outperform PST solver interms
of features and speed of computation.
Due to the drawbacks of the mentioned environments andlack of
some features that were required for an ongoing researchconducted
at West Virginia Universitys Advanced Power En-gineering Research
Center (APERC), a power analysis toolbox(PAT) was developed. PAT
incorporates most features anddynamic models that are provided by
PST. Additionally, PATincludes some FACTS device models that are
not part of PSTdistribution. Significant improvements, in terms of
speed andmodularity, were obtained by extensively using features
that
0885-8950/03$17.00 2003 IEEE
-
SCHODER et al.: PAT: A POWER ANALYSIS TOOLBOX FOR
MATLAB/SIMULINK 43
Fig. 1. PAT modules.
were introduced in Simulink V4.1, such as complex numberand
matrix signal propagation. PATs main features are
fast transient simulations; automatic generation of linearized
models; addition of new components by using Simulinks GUI; simple
interface with other MATLAB/Simulink tool-
boxes; possibility to generate C-code for real-time
simulations
using real-time workshop.This paper is organized as follows:
overview of PAT data
structure and modules is presented in Section II. Section
IIIdemonstrates some simulation and analysis of a
16-generator,68-bus system which is a representation of the New
England/New York interconnected system. Also, the implementation of
afuzzy damping controller for a UPFC in the
two-area-four-gen-erator system used to improve transient stability
is presented.Speed comparison of PAT with PST is presented in
Section IV.
II. SIMULATION ENVIRONMENT
Modules that constitute the structure of PAT are shown inFig. 1.
By combining the functionality of these modules, thetoolbox can
perform the following tasks:
load flow; transient stability; small-signal analysis.
The following sections describe these modules and their
in-teraction. But first, preprocessing and PATs data structure
arepresented.
A. PreprocessorBefore any computations can be performed, a data
file that de-
scribes the power system must be read and processed.
Currently,PAT supports a modified PST data format that includes
FACTSdevices and their controls. As a result of the preprocessing,
aMATLAB structure object, shown in Fig. 2, is obtained.
B. PAT Data StructureThe PAT data structure is designed to
hierarchically organize
the vast amounts of data necessary to describe the power
systemcomponents.
The three top-most levels of the hierarchy are shown in Fig.
2(from left to right). Starting with the abstract layer that
storesthe information of power systems components, the tree
expands
Fig. 2. PAT data structure.
Fig. 3. Power system model in Simulink.
down to the fields that hold information on specific devices
andtheir parameters.
The data structure supports simple access to specific fields,and
offers enough flexibility to be extended by the user to
ac-commodate new components. The expandability is a major
re-quirement for todays power system analysis and
simulationsoftware due to the steadily growing number of power
elec-tronics devices implemented in power systems.
C. Load FlowThe load-flow module extracts the power system
informa-
tion stored in the PAT data structure and solves the
load-flowproblem using a NewtonRaphson algorithm. The output
fromthis module is the PAT data structure appended with the
fieldsthat contain the load-flow solution as well as computed
internalsteady-state quantities of the dynamic devices and their
controls.This information is used to initialize the transient
module.
Elements included at the current development stage
aregenerators, slack buses, PI-lines, constant PQ-loads, under
loadtap changers (ULTCs), and various FACTS devices [e.g.,
staticvar compensator (SVC), thyristor-controlled series
capacitor(TCSC), static synchronous compensator (STATCOM),
staticsynchronous series compensator (SSSC), unified
power-flowcontroller (UPFC)], and their controls. The load flow of
apower system that includes FACTS devices is solved withrespect to
the desired control modes and reference values. Thepossible control
modes include fixed compensation mode aswell as constant power-flow
and voltage-control modes.
-
44 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 18, NO. 1, FEBRUARY
2003
Fig. 4. New England/New York interconnected system.
D. Transient Stability AnalysisThe transient module targets the
balanced-power system tran-
sient studies and is organized as a Simulink-Block library.
Itallows the user to build a case file via a drag-and-drop
featureprovided by Simulink. Each block in the PAT library models
onetype of device (e.g., subtransient machine model, UPFC
modeletc.). Additionally, each block is vectorized, meaning that
theuser needs to add only one block to the Simulink MDL-case fileto
represent a number of devices of the same type. For example,if
there are detailed machines and classical machines (EM)in a case
study one subtransient block and one EM-block willbe used from the
PAT library to perform the simulation. The in-ternals of each block
have been modeled by Simulink built-inblocks and/or MATLAB-S
functions. Through the utilization ofSimulinks ability to propagate
complex vectors as signals be-tween blocks, a great improvement in
simulation speed has beenachieved.
To properly initialize the time-domain simulation, thetransient
analysis module requires consistent steady-stateconditions as found
by the load-flow module and a switchingfile describing switching
sequence and disturbance scenarios(e.g., type of fault, loss of
line/load/generating unit, opening/re-closure of the faulted line,
etc.).
Simulink is based on a set of differential equation
solvers,ranging from simple fixed step (integration) to variable
timestep solvers that can handle stiff systems. These solvers are
ableto handle traditional power system elements (e.g.,
generators,excitation systems, PSSs, etc.). Furthermore, they can
cope withthe numerical problems introduced by devices with small
timeconstants, such as FACTS devices. Many power system ele-ments
have discrete and/or dynamic states (e.g., switches,
digitalcontrols, saturation limits, etc.); therefore, they require
a simu-lation environment that is capable of handling hybrid
models.Simulinks solvers have built-in zero-crossing detection
algo-rithms that properly adjust the simulation time step to
detectdiscontinuities and automatically reinitialize the
simulation.
The problem of incorporating dynamics of FACTS devicesand
nonconforming loads into the network solution has beensolved in the
following way. Due to the lack of explicit analyt-ical expressions
for the injected currents at the FACTS bus(es),the actual influence
of FACTS devices has to be found usingan iterative approach at each
time step of the simulation. Algo-rithms based on a fixed-point and
Newtons method [10], [12]have been implemented as PAT blocks (see
bus interface blockin Fig. 5) and can be placed into the mdl-case
study file viadrag-and-drop. Elements of varying impedance (i.e.,
SVC andTCSC) are interfaced via their admittance
valuesSTATCOM,SSSC, and UPFC are interfaced as voltage sources, and
noncon-forming loads as current sources.
E. Small-Signal Analysis
Though the power system is a highly nonlinear system, awealth of
information is obtained from the linearized modelaround an
operating point. The eigenstructure of the system, inparticular,
can be used to analyze properties of the system, as-sess its
stability, select control signals, and site the controllers
ordesign controllers using the rich tools of linear control
systems.For example, parameters for power system damping
controllersare often found by applying various linear control
design pro-cedures. Therefore, it was important to choose a
simulation en-vironment that guarantees the ability to linearize
the dynamicpower system model at the desired operating point, and
offersthe use of well-established linear analysis and synthesis
tools.
The built-in capabilities of the MATLAB/Simulink environ-ment
are used to determine the state-space representation of thepower
system and to perform eigenvalue analysis. Additionally,optional
toolboxes, such as robust control toolbox, LMI con-trol toolbox,
-analysis and synthesis toolbox or control systemtoolbox, can be
used to design linear controllers.
-
SCHODER et al.: PAT: A POWER ANALYSIS TOOLBOX FOR
MATLAB/SIMULINK 45
Fig. 5. Power system and UPFCs modeled in Simulink.
III. CASE STUDIES
The functionality of PAT is illustrated using two systems. Oneof
these is a well-known two-area four-generator system [13]to
illustrate usage of PAT in designing a UPFC fuzzy dampingcontroller
[14], and the New England/New York interconnectedsystem to
illustrate the other modules of PAT.
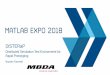
A. New England/New York SystemThe single line diagram of the
system, for which two cases are
presented, is shown in Fig. 4. The first case study is the
systemas found in [13]. In the second case, three UPFCs were
addedon three heavily loaded tie-lines (line 12, line 89, and
line4142). To ensure stability of the system, each generator
wasequipped with a simple exciter and PSS.
Simulink representations of these systems are shown inFigs. 3
and 5. Numbers that appear on each connection rep-resent the width
of vector signal being propagated. Simulinkautomatically adjusts
these values according to the informationstored in PATs data
structure. Any signal can be monitoredwhile the simulation is
running by connecting one of theblocks from the Sinks-library.
Additionally, for the purpose offurther analysis and/or plot
generation, signals can be stored inMATLABs workspace.
To find the FACTS devices bus voltages, an iterative pro-cedure
is required. The FACTS devices interface is shown inFig. 5. The
interfacing block takes the generator internal volt-ages and the
interfacing quantities of the FACTS devices as in-puts. In case of
the UPFC, the injected shunt and series volt-ages with respect to
one of its buses are taken as input signals.The output of the FACTS
devices interfacing block is used to-gether with the generator
voltages to determine the network cur-rent solutions.
The same simulation scenario is investigated for both
casestudies. At time ms, a three-phase fault is applied onthe line
between buses 29 and 28, the near end of the line isopened at ms,
and the line is completely removed at
ms. The speed response of the generator closest tothe
three-phase fault location is shown in Fig. 6. To be able
Fig. 6. Comparing speed of generator closest to the fault
location(solidsystem with UPFC; dashedsystem without UPFCs).
to estimate possible improvements in transient stability, the
re-sponse of the test system with three UPFCs installed is given
inthe same figure. These are only the preliminary results of
usingFACTS devices to enhance the overall controllability and
sta-bility of power systems. Control schemes and parameter
tuningare not investigated further in this paper. Voltage magnitude
pro-file of the faulted bus 29 and its two closest neighbors (buses
28and 61), during the first two seconds of simulation, are shownin
Fig. 7. It can be seen that the ODE solver accurately adjuststhe
time steps taken at the time of fault application (100 ms),opening
of faulted line side (190 ms), and removing the faultentirely by
opening the remote end (200 ms). The UPFC closeto the faulted area
of the power system helps to stabilize the busvoltages.
Linear representations of the two test systems are
obtainedwithin the linearization module of PAT. Signals to be used
as in-puts and outputs during the linearization procedure can be
spec-ified by connecting Simulink in and outports at the desired
lo-cations. Part of the eigenvalue plot for the linearized power
sys-tems with and without the UPFCs installed is given in Fig.
8.The state space representations of both systems containing
222
-
46 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 18, NO. 1, FEBRUARY
2003
Fig. 7. Comparing bus voltages close to fault location with
(solid) and without(dashed) UPFCs.
Fig. 8. Comparing eigenvalues with () and without () UPFCs.
and 207 continuous states, respectively, have been verified
viacomparison of simulations of the linear and nonlinear
systemsusing small disturbances.
B. Two-Area SystemSince this system is widely available in the
literature, its
single line diagram is omitted. In [14], the authors have
usedfuzzy control to design a UPFC damping controller. Fig.
9compares the response of the system without UPFC, withUPFC, as
well as the system with UPFC and fuzzy dampingcontroller. The fuzzy
damping controller measures the activeline power flow at the UPFC
site and augments the referencesignal for the active line power
flow as controlled by the UPFC.The improved transient stability due
to the fuzzy dampingscheme can be observed. Also, a reduced first
swing stabilityin case of applying a UPFC without fuzzy damping
control isnoticeable.
IV. PERFORMANCE EVALUATION
To evaluate the performance of PAT comparisons with thePST,
on-the-test systems with and without UPFCs have been
Fig. 9. Relative machine angle between two areas (dashedwithout
UPFC,solidwith UPFC, dash-dottedUPFC with fuzzy damping
control).
TABLE ISIMULATION TIME FOR PST AND PAT WITHOUT UPFCS
FOR A TRANSIENT PERIOD OF 10 s
TABLE IISIMULATION TIME PAT WITH UPFCS FOR A TRANSIENT PERIOD OF
10 s
performed. Very promising results with speed ratio up to 20 :
1in favor of PAT were achieved. To obtain raw performance
mea-surement, all displays that get refreshed during the
simulationrun-time were disabled in both toolboxes. Environment
used forthe benchmarking purpose consisted of Pentium IV-based
PCrunning MATLAB/Simulink 6.0 under Windows 2000.
Table I shows the simulation time required for the powersystem
without UPFCs in PST and PAT using different ODEsolvers and time
step settings. The simulation outputs producedwith different solver
settings were identical in terms of system
-
SCHODER et al.: PAT: A POWER ANALYSIS TOOLBOX FOR
MATLAB/SIMULINK 47
behavior and accuracy. The time setting for the varying time
stepsolvers should be interpreted as the maximum time step
allowed.
Table II gives the time required to simulate the test systemwith
UPFCs included. The implicit interface block for dynamicloads and
FACTS devices introduces an algebraic loop inSimulink model that
needs to be solved iteratively. Hence, asignificant increase in
simulation time is recorded. Extremelysmall time steps are required
to maintain the numerical stabilityof simulation when fixed step
size solvers are used. Therefore,results obtained with these
solvers are omitted from the table.
Further comparisons with different modeling approachessuch as
EMTPs detailed three-phase analysis have not beenattempted.
Electromagnetic transients and switching events ofhigh frequency
are not in the scope of PAT.
V. CONCLUSIONA power system simulation environment in
MATLAB/
Simulink is presented in this paper. The developed PAT is avery
flexible and modular tool for load flow, transient, andsmall-signal
analysis of electric power systems. Standard powersystem component
models and a wide range of FACTS devicesare included. Its data
structure and block library have beentested to confirm its
applicability to small-to-medium-sizedpower systems. Its advantages
over existing commercialpackages are given. The software presented
complementsexisting commercial packages such as PST and it has
beendemonstrated on test systems that it is faster and has
moreFACTS device models. Two systems have been given toillustrate
the capabilities of PAT. The first test system is theNew
England/New York power system and illustrates basicfeatures of the
toolbox, such as speed of simulation, interfacingof FACTS devices,
and extraction of linearized model aroundan operating point. The
second system is the well-knowntwo-area system and demonstrates the
implementation offuzzy-logic-based damping controller for the UPFC
within thesimulation environment. This software library has not
beenreleased to the public at this time.
REFERENCES[1] N. G. Hingorani and L. Gyugyi, Understanding
FACTS. Piscataway,
NJ: IEEE Press, 2000.[2] PSS/E, Power system simulator for
engineering, Power Technologies
Inc., Schenectady, NY, 2001.[3] EUROSTAG, Software for the
simulation of power system dynamics,
Tractebel Energy Engineering, Brussels, Belgium, 2001.[4]
PSAPAC, The power system analysis package, Powertech Labs Inc.,
Vancouver, BC, Canada, 2001.[5] MATLAB, High-performance numeric
computation and visualization
software, The Mathworks Inc., Natick, MA, 2001.
[6] Simulink, Dynamic system simulation software, The Mathworks
Inc.,2001.
[7] T. Hiyama and A. Ueno, Development of real time power system
sim-ulator in MATLAB/Simulink environment, in Proc. IEEE Power
Eng.Soc. Summer Meeting, Seattle, WA, July 1620, 2000.
[8] J. Mahseredjian and F. Alvarado, Creating an electromagnetic
transientprogram in MATLAB: MatEMTP, IEEE Trans. Power Delivery,
vol.12, pp. 380388, Jan. 1997.
[9] E. Allen, N. LaWhite, Y. Yoon, J. Chapman, and M. Ilic,
Interactiveobject-oriented simulation of interconnected power
systems usingsimulink, IEEE Trans. Educ., vol. 44, pp. 8795, Feb.
2001.
[10] J. Chow, Power system toolbox 2.0, in Cherry Tree
Scientific Software,Colborne, ON, Canada, 2000.
[11] Hydro-Quebec and TEQSIM International, Power system
blockset foruse with Simulink, The Mathworks Inc., Natick, MA,
2001.
[12] K. Schoder, A. Hasanovic, and A. Feliachi, Load-flow and
dynamicmodel of the Unified Power Flow Controller (UPFC) within the
PowerSystem Toolbox (PST), in Proc. IEEE Midwest Symp. Circuits
Syst.,Lansing, MI, August 811, 2000.
[13] R. Graham, Power System Oscillation, M. A. Pai, Ed.
Norwell, MA:Kluwer, 2000.
[14] K. Schoder, A. Hasanovic, and A. Feliachi, Power system
dampingusing fuzzy controlled unified power flow controller, in
Proc. IEEEPower Eng. Soc. Winter Meeting, Columbus, OH, 2001.
Karl Schoder received the M.S.E.E. (Dipl.-Ing. der
Elektrotechnik) degreefrom Vienna University of Technology, Vienna,
Austria, in 1997, and the Ph.D.degree from the Department of
Computer Science and Electrical Engineeringat West Virginia
University, Morgantown, in 2002.
Currently, he is a visiting Research Assistant Professor at West
VirginiaUniversity.
Amer Hasanovic was born in Tuzla, Bosnia-Herzegovina, in 1976.
He receivedthe B.S. degree from the University of Tuzla,
Bosnia-Herzegovina, in 1999,and the M.S. degree in electrical
engineering from West Virginia University,Morgantown, in 2001. He
is currently pursuing the Ph.D. degree at West VirginiaUniversity,
Morgantown.
Currently, he is a Graduate Research Assistant at West Virginia
University.
Ali Feliachi (SM86) received the Diplme dIngnieur en
electrotechnique de-gree from Ecole Nationale Polytechnique of
Algiers, Algeria, in 1976, and theM.S. and Ph.D. degrees in
electrical engineering from Georgia Institute of Tech-nology,
Atlanta, in 1979 and 1983, respectively.
Currently, he is full Professor and the holder of the Electric
Power SystemsChair endowed position at West Virginia University,
Morgantown. He has beena faculty member in the Lane Department of
Computer Science and ElectricalEngineering at West Virginia
University since 1984.
Azra Hasanovic received the electrical engineering degree from
the Univer-sity of Tuzla, Bosnia-Herzegovina, in 1997, and the
M.S.E.E. degree from WestVirginia University, Morgantown, in
2000.
Currently, she is with AEP Transmission Planning/System Dynamics
Anal-ysis Group, Columbus, OH.
Index:
CCC: 0-7803-5957-7/00/$10.00 2000 IEEE
ccc: 0-7803-5957-7/00/$10.00 2000 IEEE
cce: 0-7803-5957-7/00/$10.00 2000 IEEE
index:
INDEX:
ind: