Embed Size (px)
Citation preview

ISSN - 2250 - 1991
Volume : 1 Issue : 3 March 2012
` 200
www.paripex.in
Listed in International ISSN Directory, Paris.
Journal for All Subjects
1. Thoughts, language vision and example in published research paper are entirely of author of research paper. It is notnecessary that both editor and editorial board are satisfied by the research paper. The responsibility of the matter ofresearch paper/article is entirely of author.
2. Editing of the Paripex is processed without any remittance. The selection and publication is done after recommendations ofatleast two subject expert referees.
3. In any condition if any National/International University denies accepting the research paper published in PIJR, then it is notthe responsibility of Editor, Publisher and Management.
4. Only the first author is entitle to receive the copies of all co-authors5. Before re-use of published research paper in any manner, it is compulsory to take written permission from the Editor-PIJR,
unless it will be assumed as disobedience of copyright rules.5. All the legal undertaking related to Paripex is subject toAhmedabad Jurisdiction.7. The research journal will be send by normal post. If the journal is not received by the author of research papers then it will not
be the responsibility of the Editor and publisher. The amount for registered post should be borne by author of the researchpaper in case of second copy of the journal.
Dr A Kumar Director, College Development Council (CDC)
Director, Internal Quality Assurance Cell (IQAC)Professor in Management,
Department of Business Administration, Faculty of Management,Bhavnagar University,
Dr. Kaushal KishoreChhattisgarh
Dr.(Prof) Vijay Kumar SoniRajasthan
Dr. R. RamachandranTamilnadu
Dr. A.R. SaravankumarTamilnadu
Prof. Jothi MKattankulathur
Dr. C. D. BalajiChennai
Dr. Ravikant SwamiHimachal Pradesh
Dr. Ashok S. PawarAurngabad
Prof. C M MaranTamilnadu
Dr. V. KumaravelNamakkal
Dr. K. Prabhakar,Chennai
Dr. Anukrati SharmaJaipur
Dr. Amit Bandyopadhyay Calcutta
Editor-In-Chief
Editorial Advisory Board
You can download the Advertisement / Subscription Form from website www.paripex.in. You willrequire to print the form. Please fill the form completely and send it to the Editor, Paripex, IndianJournal of Research along with the payment in the form of Demand Draft/Cheque at Par drawn infavour of Paripex payable atAhmedabad.
Advertisement Details Subscription Details
Position B/W(Single Color) Fore Color
Full Inside CoverFull Page (Inside) -
1250062505000
Paripex - Indian Journal of ResearchJournal for All Subjects
Editor,Paripex - Indian Journal of Research
8-A, Banans, Opp. SLU Girls College, New Congres Bhavan, Paldi, Ahmedabad-380006, Gujarat, INDIA
Contact.: +91-8866003636 E-mail : [email protected]
ISSN : 2250 - 1991
Period Rate Discount Amount PayableOne Year (12 Issues) NilTwo Year (24 issues)
Three Year (36 issues)Five Year (60 issues)
2400200
24004800720012000
300600
4600690011400
Dr. R. Ganapathi Alagappa University
INDEXSr. No. Title Author Subject Page No.
1 IFRS – A Global Convergence… Chauhan Lalit R., Kalola Rimaben A.
Accountancy 1-3
2 Assessment of hydrological properties… Dr. Uttam Goswami Applied Geology
4-7
3 Operational Risk Assessment for Bank… Dr. Mahalaxmi Krishnan
Banking 8-9
4 Oxidative stress and antioxidant status… Sunil Purohit, Ajita Biochemistry 10-11
5 Bioactive Polyphenol of Nelumbo Nucifera B. Anandhi, D. Sukumar
Chemistry 12
6 Customer Satisfaction Impacts on Product… Mr. C. S. Jayanthi Prasad
Chemistry 13-15
7 Geometry Of Geodesic Domes V. K. Dogra Civil Engineering
16-19
8 Indian Capital Market – A Review Dr. Bheemanagouda Commerce 20-22
9 Inventory Management : Comparative Analysis… Dr. Shital P. Vekariya Commerce 23-24
10 Boom in Indian Education –A Study with special… Sri Suvarun Goswami Commerce 25-27
11 Variables Influencing Supply Chain Effectiveness Vipul Chalotra Commerce 28-30
12 Impacts of Micro-finance Activities on SHGs: Some… Dr. Vijay K. Patel Commerce 31-36
13 Reforms, Incidence of Employment in India Dr. Devraj G. Ganvit Economics 37-38
14 Vasantrav Naik yanche Samajik shetratil Yogdan Dr. Ashok Pawar, Mr. Atmaram mulik,Dr. Sunita Rathod
Economics 39-42
15 Bhartatil Indira Aavas Yojneche Mulyankan… M.K. Ingole, Ashok Pawar
Economics 43-44
16 Farmers Suicide: A Short Overview of Vidharbha… Dr. Ashok S. Pawar,Mr.Sawale Sangharsha baliram
Economics 45-46
17 Bharatcha Aantarrastriya vyapar v viksit desh… Dr. Ashok Shankarrao Pawar, Dr Sunita J Rathod
Economics 47-48
18 Role of ICT Enabled Teaching and Learning: A new… Mohankumar C. Kaimal Education 49-52
19 Self Evaluation Of Secondary School Teachers : With… Dr. Pratik R. Maheta Education 53-54
20 Organizational Commitment and Job Satisfaction… Dr. Praveena, K. B. Education 55-57
21 Horizontal Line Based Stereo Matching Method Khyati N. Patel, Mrs. Sameena Zafar
Engineering 58-62
22 Thermal performance study on parallel flow… Satyender Singh,Prashant Dhiman,Madhur Mahajan,Akash Narulad
Engineering 63-66
23 Spatio-temporal Pattern of Grape Farming In Solapur… Dr. G.U.Todkari,Shri B.D. Patil
Geography 67-69
24 An Analytical Approach to the Changing Channel… Dr. Nibedita Das (Pan) Geography 70-73
25 Impact of Role of Men in Women Empowerment Dr. Anjali A. Rajwade Home Science 74-76
26 Retention Practices of Automobile Industries in… Dr.K.Balanaga Gurunathan, Ms. V. Vijayalakshmi
HRM 77-78
27 Potential Appraisal Kapil Dev Upadhyay,Dr. (Prof.) Vijay Kumar Soni
HRM 79-80
28 A Secure Group Communication Architecture For a Mobile…
Ms. V. Sunitha Reddy, Mr. C.S. Jayanthi Prasad
Information Technology
81-83
29 Indian Writing In English And The Genre - Novel… Chetan J. Marakana Literature 84-85
30 Something is Missing Madanmohan. M. Dange
Literature 86
31 Communication for Scientific Studies Madanmohan. M. Dange
Literature 87-88
32 Sustainability and Management of Smes - A Case… Mrs. Afreen Nishat A. Nasabi
Management 89-90
33 Impacts of Direct Tax Code on Individual Income… Dr. Shailesh N. Ransariya
Management 91-93
34 Profitability Analysis Of Asian Paint Ltd… Dr.Butalal C. Ajmera Management 94-96
35 A Study On The Role Of Customes House Agent… Dr. P. Jayasubramanian, R.Kumeresan
Management 97-98
36 Effectiviness of Mobile Advertising - The Case… Kanwal Gurleen, Dr. Sukhmani
Management 99-101
37 Indian Retailing Business in Informal Sector Dr. P. Vikkraman, Mr. S. Baskaran
Management 102-103
38 Customer Preference Towards Selected Retail… Ms. N. Sasikala, Mrs. R. Vasanthi
Management 104-106
39 Accessible Tourism: A Study on Barrier - Free… Nisha Rathore Management 107-109
40 Study of Performance Measurement in Logistics… Sarada Prasanna Patra, Dr. Manjusmita Dash
Management 110-112
41 Working Capital Management-“Indicators of Short… Bhavesh P Chadamiya, Mital R Menapara
Management 113-115
42 A comparative study of store selection factors… Chirag B. Rathod, Vinit M. Mistri, Parimal R. Trivedi
Management 116-118
43 Consumer demographics and factors of store… Hardik M. Mistri, Chirag B. Rathod, Vinit M. Mistri
Management 119-121
44 I Feel Case-Study Method of Teaching Is”…Student Speaks!!
Miss Dhara Jha Management 122-124
45 Job Stress of Employees in Banks: A Study… Mrs. K. Revathi, Mr. J. Gnanadevan, Dr. R. Ganapathi
Management 125-130
46 Sidbi Lending Policies for Micro, Small and Medium… Dr. Gaurav Lodha, Nanda Indulkar
Management 131-133
47 Human Capital- A Key To Corporate Excellence Dr. Viral Shilu Management 134-135
48 Study of Performance Measurement in Logistics… Sarada Prasanna Patra, Dr.Manjusmita Dash
Management 136-138
49 Consumer Behaviour Towards Refrigerators… M. Lakshmi Priya, J. Gnanadevan,Dr. R. Ganapathi
Management 139-143
50 SOCIO – Economic Conditions of Self Help Group… R. Durga Rani, J. Gnanadevan,Dr. R. Ganapathi
Management 144-147
51 A Study on the Advantages and Disadvantages… Dr. Kanagaluru Sai Kumar
Management 148-149
52 Measuring Advertising Effectiveness Kouser Noor Fathima Management 150-152
53 An Indepth Study on Customer Awareness… Dr. Memon, Nayan Vala
Marketing 153-156
54 Sales Territory and Sales Quota Kiran Ravindra Sahasrabudhe,Dr. (Prof.) Vijay Kumar Soni
Marketing 157-158
55 Avascular Necrosis of the Femoral Head in a Case… Dr. Sonawane Darshankumar
Medical Science
159-160
56 A Comparative Study of Personality Traits… Dr. Varshaben V. Dholriya
Psychology 161-162
57 Detection of trace elements concentration… Hingankar A. P. Science 163-164
58 Ensuring Perceptible Transformations in Rural… Krishna Kant Sharma Social Welfare 165-166
59 Detection of trace elements concentration… Dixit G. S. Zoology 167-168
60 Polymorphism of Red Blood Cell in Peripheral… Joshi R. P. Zoology 169-170

Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
58 X PARIPEX - NDIAN JOURNAL OF RESEARCH
Research Paper
* P.G. Student, Patel College Of Science & Technology,Ratibad, Bhopal, Rajiv Gandhi Proudyogiki Vishwavidyalaya
** Head Of The Department, Patel College Of Science & Technology, Ratibad, Bhopal, Rajiv Gandhi Proudyogiki Vishwavidyalaya
Engineering
Horizontal Line Based Stereo Matching Method
* Khyati N. Patel ** Mrs. Sameena Zafar
Keywords :
Obtaining reliable disparity maps, indicating distance of surface from the stereo camera pair, have importance in robotic applications and autonomous systems. Stereo vision is one of methods that can yield depth information of the scene. It uses stereo image pairs from two cameras to produce disparity maps that can be easily turn into depth maps. Reliability of depth maps and computational cost of algorithm is key issue for implementing real time robust applications. Matlab R7b has been chosen for implementing different Stereo Matching Algorithms. Horizontally Line-Based gives good disparity Map. Stereo Matching Algorithms are tested on standard images like Tsukuba, Cravon, we can try for the same images and prepare the experimental real time setup for matching the images. Quality metrics use for evaluating the performance of stereo correspondence algorithms and the techniques used for acquiring our image data sets and ground truth estimates and got comparisons of all algorithm.
ABSTRACT
IntroductionIn recent years, it is an important research direction applying visual image technology for underwater target and environ-ment detection. With the development of the theory of binocu-lar vision, underwater binocular vision technology has been used in many fields, such as marine resources exploration, underwater target detection, marine ecological environment.
Binocular vision, which is inspired by humanvisual process, computes the disparity between correspondence points in images captured by two cameras for distance measurement, and then recovers the depth information of the object. Con-sidering the features of underwater environment, applying binocular vision technology can better perceive underwater environment information. It provides the theory basis for robot understanding the underwater environment and realizing the navigation and positioning. The image matching is one of the key technologies to realize underwater binocular vision. And the result of the matching would affect directly the precision of object recognition and 3D scene reconstruction.
Image matching is a process of seeking the corresponding feature points in two different images which are in the same scene. Currently, there are many research results of under water image matching. stereo matching methods are divid-ed into region-based matching, phase-based matching and feature-based matching. It can obtain a dense disparity map by region-based matching method. But it is rarely used be-cause of its large amount of computation. The parallax im-age obtained by phase based matching method can reach sub-pixel accuracy. However, the method is more sensitive to the distortion, and it is difficult to choose the size of the matching window precisely. Feature-based matching method can greatly reduce the amount of the matching process calcu-lation. Since it is more sensitive to the position changes, the precision of matching is higher. But there exists miss detec-tion phenomenon. In the three matching methods, the more classical algorithms are Absolute Balance Search algorithm, normalized cross-correlation matching algorithms, image mo-ments matching algorithm, the matching algorithms based on Harris corner points and so on.
Binocular vision is the process of recovering depth from two images with the same height, the same direction and a cer-tain distance, similar to human vision principle. During the process, stereo matching is the key point, which means to find the correspondence pixels of the same physical spatial point on both images. Binocular stereo matching algorithm research falls into two categories. One is based on sparse points, and the other is based on dense points. The latter one is more accurate on image matching. There are many binocu-lar dense-point matching methods in which the representa-tives are Birch Field algorithm and Yoon algorithm. Birch Field algorithm is used to match two gray-scale images. It applies dynamic programming into matching epipolar lines. It is ef-ficient but inaccurate. Subsequent improvement method of Birch Field is based on each pixel’s eight neighborhoods and improves the matching accuracy to some extent. In the study of color image matching, Yoon’s method of adaptive window algorithm is a milestone.
Obtaining reliable depth maps, indicating distance of surface from the stereo camera pair, have importance in robotic appli-cations and autonomous systems. Intelligent systems, which can move around by itself, could be developed by obtaining dept information from the sensors. Stereovision is the one of methods that can yield dept information of the scene. It uses stereo image pairs from two cameras to produce disparity maps that can be easily turn into depth maps.
Brief ReviewStereo matching is another technique that is well known for measure and it is very easy to understand and program. With stereo matching we can get the exact position of a target by two stereo pictures. However the traditional stereo match-ing needs a strict condition about camera, such as the axis of stereo camera (a pair of camera with the same proper-ties) must be kept parallel and the height of cameras will be the same. These conditions limited the application of stereo matching. The position of a point P in 3D space can be meas-ured by traditional stereo matching that computes the coordi-nate of P, (x, y, z), from two pictures called left image and right image taken by two cameras separately (Figure 1). Based on
Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
PARIPEX - INDIAN JOURNAL OF RESEARCH X 59
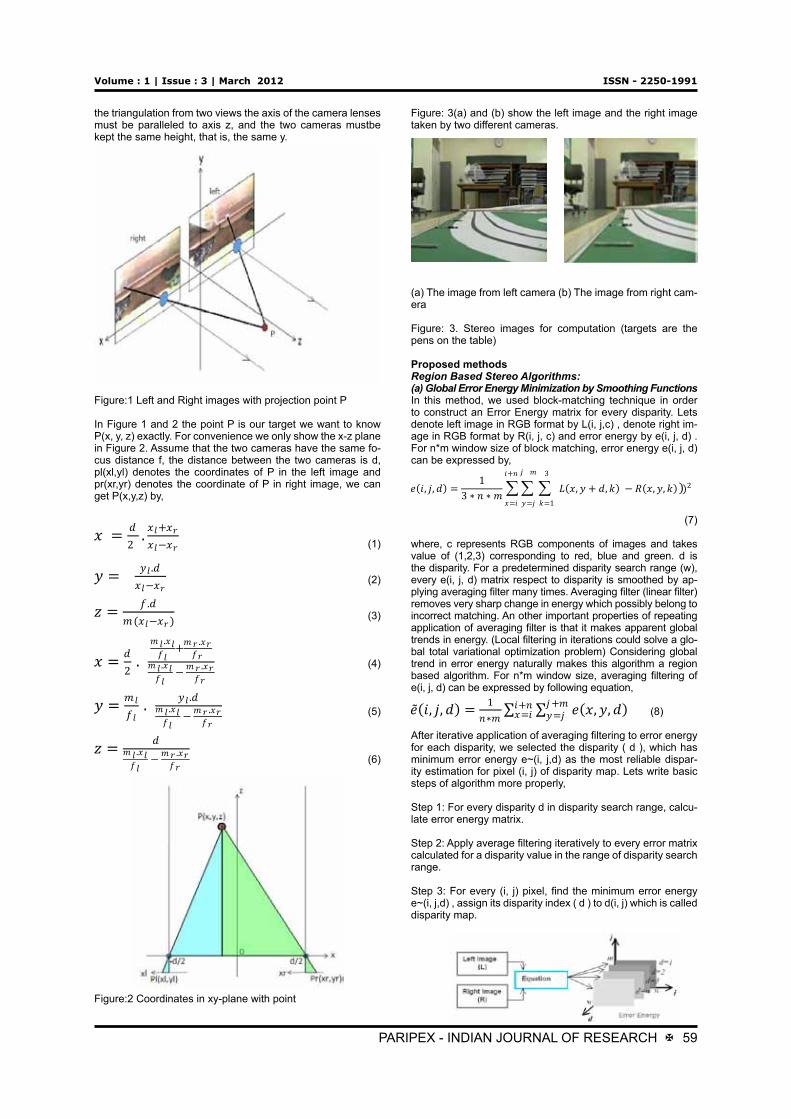
the triangulation from two views the axis of the camera lenses must be paralleled to axis z, and the two cameras mustbe kept the same height, that is, the same y.
Figure:1 Left and Right images with projection point P
In Figure 1 and 2 the point P is our target we want to know P(x, y, z) exactly. For convenience we only show the x-z plane in Figure 2. Assume that the two cameras have the same fo-cus distance f, the distance between the two cameras is d, pl(xl,yl) denotes the coordinates of P in the left image and pr(xr,yr) denotes the coordinate of P in right image, we can get P(x,y,z) by,
(1)
(2)
(3)
(4)
(5)
(6)
Figure:2 Coordinates in xy-plane with point
Figure: 3(a) and (b) show the left image and the right image taken by two different cameras.
(a) The image from left camera (b) The image from right cam-era
Figure: 3. Stereo images for computation (targets are the pens on the table)
Proposed methodsRegion Based Stereo Algorithms:(a) Global Error Energy Minimization by Smoothing FunctionsIn this method, we used block-matching technique in order to construct an Error Energy matrix for every disparity. Lets denote left image in RGB format by L(i, j,c) , denote right im-age in RGB format by R(i, j, c) and error energy by e(i, j, d) . For n*m window size of block matching, error energy e(i, j, d) can be expressed by,
(7)
where, c represents RGB components of images and takes value of (1,2,3) corresponding to red, blue and green. d is the disparity. For a predetermined disparity search range (w), every e(i, j, d) matrix respect to disparity is smoothed by ap-plying averaging filter many times. Averaging filter (linear filter) removes very sharp change in energy which possibly belong to incorrect matching. An other important properties of repeating application of averaging filter is that it makes apparent global trends in energy. (Local filtering in iterations could solve a glo-bal total variational optimization problem) Considering global trend in error energy naturally makes this algorithm a region based algorithm. For n*m window size, averaging filtering of e(i, j, d) can be expressed by following equation,
(8)
After iterative application of averaging filtering to error energy for each disparity, we selected the disparity ( d ), which has minimum error energy e~(i, j,d) as the most reliable dispar-ity estimation for pixel (i, j) of disparity map. Lets write basic steps of algorithm more properly,
Step 1: For every disparity d in disparity search range, calcu-late error energy matrix.
Step 2: Apply average filtering iteratively to every error matrix calculated for a disparity value in the range of disparity search range.
Step 3: For every (i, j) pixel, find the minimum error energy e~(i, j,d) , assign its disparity index ( d ) to d(i, j) which is called disparity map.
Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
60 X PARIPEX - NDIAN JOURNAL OF RESEARCH
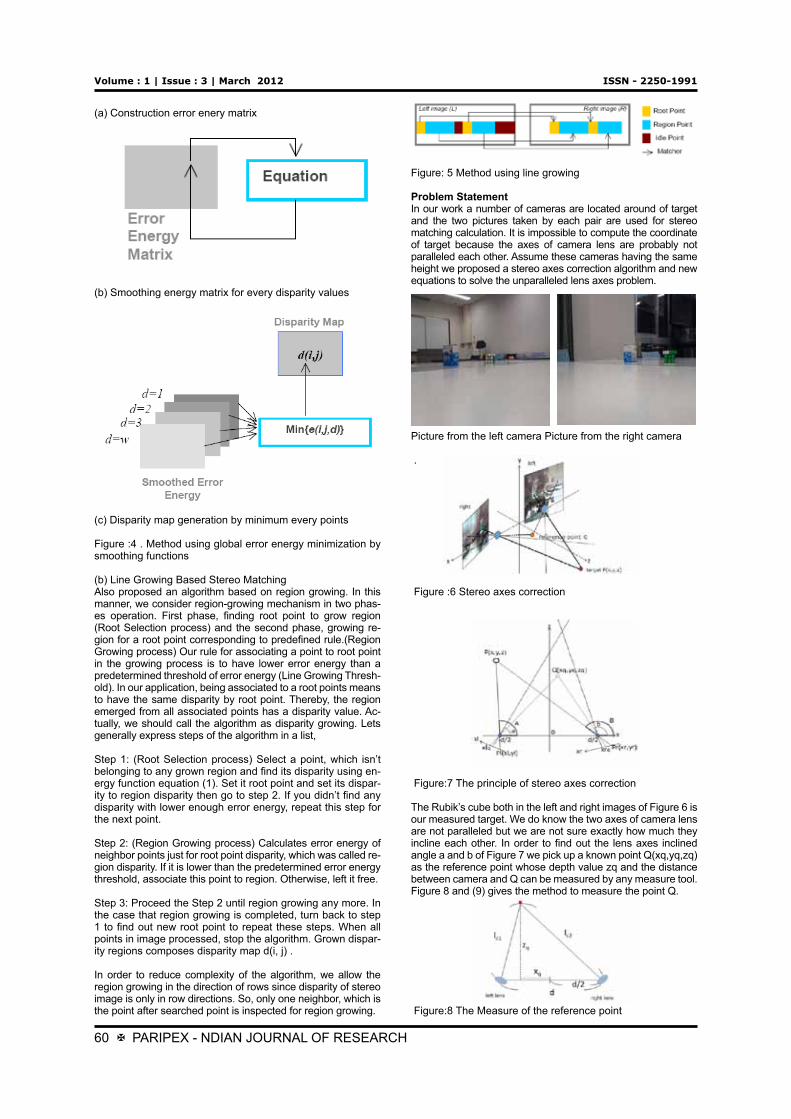
(a) Construction error enery matrix
(b) Smoothing energy matrix for every disparity values
(c) Disparity map generation by minimum every points
Figure :4 . Method using global error energy minimization by smoothing functions
(b) Line Growing Based Stereo MatchingAlso proposed an algorithm based on region growing. In this manner, we consider region-growing mechanism in two phas-es operation. First phase, finding root point to grow region (Root Selection process) and the second phase, growing re-gion for a root point corresponding to predefined rule.(Region Growing process) Our rule for associating a point to root point in the growing process is to have lower error energy than a predetermined threshold of error energy (Line Growing Thresh-old). In our application, being associated to a root points means to have the same disparity by root point. Thereby, the region emerged from all associated points has a disparity value. Ac-tually, we should call the algorithm as disparity growing. Lets generally express steps of the algorithm in a list,
Step 1: (Root Selection process) Select a point, which isn’t belonging to any grown region and find its disparity using en-ergy function equation (1). Set it root point and set its dispar-ity to region disparity then go to step 2. If you didn’t find any disparity with lower enough error energy, repeat this step for the next point.
Step 2: (Region Growing process) Calculates error energy of neighbor points just for root point disparity, which was called re-gion disparity. If it is lower than the predetermined error energy threshold, associate this point to region. Otherwise, left it free.
Step 3: Proceed the Step 2 until region growing any more. In the case that region growing is completed, turn back to step 1 to find out new root point to repeat these steps. When all points in image processed, stop the algorithm. Grown dispar-ity regions composes disparity map d(i, j) .
In order to reduce complexity of the algorithm, we allow the region growing in the direction of rows since disparity of stereo image is only in row directions. So, only one neighbor, which is the point after searched point is inspected for region growing.
Figure: 5 Method using line growing
Problem StatementIn our work a number of cameras are located around of target and the two pictures taken by each pair are used for stereo matching calculation. It is impossible to compute the coordinate of target because the axes of camera lens are probably not paralleled each other. Assume these cameras having the same height we proposed a stereo axes correction algorithm and new equations to solve the unparalleled lens axes problem.
Picture from the left camera Picture from the right camera
.
Figure :6 Stereo axes correction
Figure:7 The principle of stereo axes correction
The Rubik’s cube both in the left and right images of Figure 6 is our measured target. We do know the two axes of camera lens are not paralleled but we are not sure exactly how much they incline each other. In order to find out the lens axes inclined angle a and b of Figure 7 we pick up a known point Q(xq,yq,zq) as the reference point whose depth value zq and the distance between camera and Q can be measured by any measure tool. Figure 8 and (9) gives the method to measure the point Q.
Figure:8 The Measure of the reference point

Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
PARIPEX - INDIAN JOURNAL OF RESEARCH X 61
(9)
(10)
Now the known Q(xq, yq, zq) into equations, where xlq is coor-dinate x of Q in the left image and xrq is coordinate x of Q in the right image,
(11)
(12)
A and B that are inclined angles of target P in the left image and the right image can be expressed by
(13)
(14)
Therefore the coordinate of target P can be obtained by
(15)
(16)
(17)
If the properties of the left camera and the right camera are different, let fl,ml and fr,mr stand for the focus distance and coefficients m of the left camera and the right camera sepa-rately, a, b, A and B are rewritten as follows,
(18)
(19)
(20)
(21)
Having the new equations not worry about whether the lens axes of cameras are paralleled or not anymore. And the shadow area of figure become more widely than before, if necessary we can incline leans axes intentionally to get bet-ter broad views. Meanwhile in the new method the reference point plays an important role to correct the unparalleled lens axes.
A critical issue in stereo matching is to measure the similarity (dissimilarity) between correspondences, which is calculated as a matching cost. Common matching costs defined based on the brightness constancy assumption, i.e., scene points have similar intensities in different views, are Absolute Differ-ence and Squared Difference. Using the matching cost, many local and global stereo methods have been proposed to im-prove the matching accuracy, substantially.
Other matching cost functions obtain robustness to radiomet-ric differences by removing or relaxing the brightness con-stancy assumption. Hirschmuller evaluated many of them
such as Normalized Cross-Correlation (NCC) ,rank and census transforms , LoG and mean filters. As a more compli-cated measure, mutual information method can handle more complex radiometric transformations. When globally reason-ing the image radiometric transformation, mutual information method is comparably sensitive to local variations such as vignetting.
Figure:9 Matching the Tsukuba (a) left image and (b) its right image with a global intensity bias
WorkThe major innovative point is to combine color aggregation with local disparity estimation and adaptive window matching. It is able to accomplish a better matching accuracy while ef-fectively reducing the time complexity thus improves the per-formance of the algorithm.
Compared with land image, there are more significant differ-ences in underwater image quality. Medium’s strong absorp-tion of light and scattering properties, the underwater image has the characteristics of low contrast, high ambiguity and low image pixel resolution.
In underwater image based on stereo matching algorithm is already present and here we can see that which output will come if underwater image is based on window-based adap-tive correspondence search algorithm but we can use hori-zontal line based method.
Using window and Horizontal line we use the following steps:
Take the disparity map estimated from the above step as the initial value, now we use window-based correspondence method to optimize the result.
For each pixel p and its neighborhood Np in reference im-age, the corresponding pixel pd and its neighborhood Np in target image, define the dissimilarity E (p, p4) between the two windows:
(22)
Where e (q ,qd) is absolute difference and w( p, q) is the adaptiveweight:
(23)
∆cpq and ∆gpq are color similarity and geometric proximity.
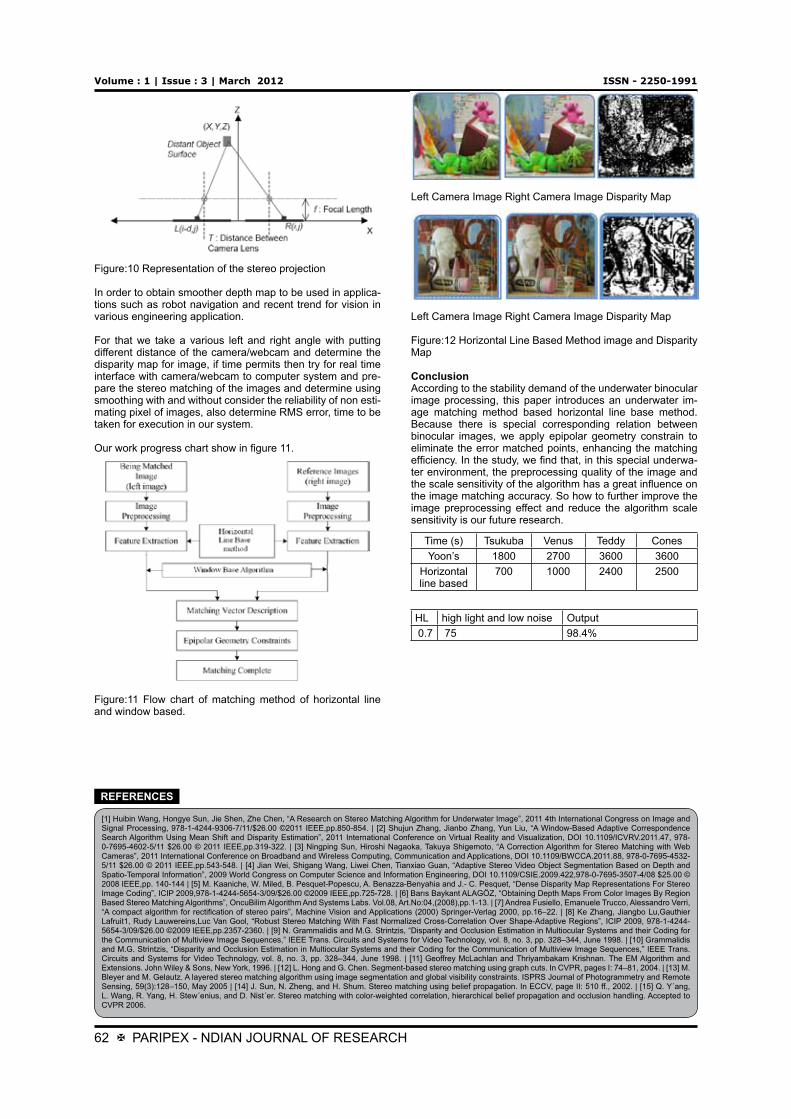
To better understand depth and disparity relation, let see ster-eo projection representation illustrated in the Figure 14. By considering the figure, one can derive relation between dept (Z) and disparity (d) by using basic geometrical calculations as following.
(24)
If real location of object surface projected at pixel (i, j) is will-ing to calculate, following formulas can be used in calculation of (X ,Y) points after calculation of the Z .
Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
62 X PARIPEX - NDIAN JOURNAL OF RESEARCH
(25)
Figure:10 Representation of the stereo projection
In order to obtain smoother depth map to be used in applica-tions such as robot navigation and recent trend for vision in various engineering application.
For that we take a various left and right angle with putting different distance of the camera/webcam and determine the disparity map for image, if time permits then try for real time interface with camera/webcam to computer system and pre-pare the stereo matching of the images and determine using smoothing with and without consider the reliability of non esti-mating pixel of images, also determine RMS error, time to be taken for execution in our system.
Our work progress chart show in figure 11.
Figure:11 Flow chart of matching method of horizontal line and window based.
Left Camera Image Right Camera Image Disparity Map
Left Camera Image Right Camera Image Disparity Map
Figure:12 Horizontal Line Based Method image and Disparity Map
ConclusionAccording to the stability demand of the underwater binocular image processing, this paper introduces an underwater im-age matching method based horizontal line base method. Because there is special corresponding relation between binocular images, we apply epipolar geometry constrain to eliminate the error matched points, enhancing the matching efficiency. In the study, we find that, in this special underwa-ter environment, the preprocessing quality of the image and the scale sensitivity of the algorithm has a great influence on the image matching accuracy. So how to further improve the image preprocessing effect and reduce the algorithm scale sensitivity is our future research.
Time (s) Tsukuba Venus Teddy ConesYoon’s 1800 2700 3600 3600
Horizontal line based
700 1000 2400 2500
HL high light and low noise Output 0.7 75 98.4%
REFERENCES
[1] Huibin Wang, Hongye Sun, Jie Shen, Zhe Chen, “A Research on Stereo Matching Algorithm for Underwater Image”, 2011 4th International Congress on Image and Signal Processing, 978-1-4244-9306-7/11/$26.00 ©2011 IEEE,pp.850-854. | [2] Shujun Zhang, Jianbo Zhang, Yun Liu, “A Window-Based Adaptive Correspondence Search Algorithm Using Mean Shift and Disparity Estimation”, 2011 International Conference on Virtual Reality and Visualization, DOI 10.1109/ICVRV.2011.47, 978-0-7695-4602-5/11 $26.00 © 2011 IEEE,pp.319-322. | [3] Ningping Sun, Hiroshi Nagaoka, Takuya Shigemoto, “A Correction Algorithm for Stereo Matching with Web Cameras”, 2011 International Conference on Broadband and Wireless Computing, Communication and Applications, DOI 10.1109/BWCCA.2011.88, 978-0-7695-4532-5/11 $26.00 © 2011 IEEE,pp.543-548. | [4] Jian Wei, Shigang Wang, Liwei Chen, Tianxiao Guan, “Adaptive Stereo Video Object Segmentation Based on Depth and Spatio-Temporal Information”, 2009 World Congress on Computer Science and Information Engineering, DOI 10.1109/CSIE.2009.422,978-0-7695-3507-4/08 $25.00 © 2008 IEEE,pp. 140-144 | [5] M. Kaaniche, W. Miled, B. Pesquet-Popescu, A. Benazza-Benyahia and J.- C. Pesquet, “Dense Disparity Map Representations For Stereo Image Coding”, ICIP 2009,978-1-4244-5654-3/09/$26.00 ©2009 IEEE,pp.725-728. | [6] Barıs Baykant ALAGÖZ, “Obtaining Depth Maps From Color Images By Region Based Stereo Matching Algorithms”, OncuBilim Algorithm And Systems Labs. Vol.08, Art.No:04,(2008),pp.1-13. | [7] Andrea Fusiello, Emanuele Trucco, Alessandro Verri, “A compact algorithm for rectification of stereo pairs”, Machine Vision and Applications (2000) Springer-Verlag 2000, pp.16–22. | [8] Ke Zhang, Jiangbo Lu,Gauthier Lafruit1, Rudy Lauwereins,Luc Van Gool, “Robust Stereo Matching With Fast Normalized Cross-Correlation Over Shape-Adaptive Regions”, ICIP 2009, 978-1-4244-5654-3/09/$26.00 ©2009 IEEE,pp.2357-2360. | [9] N. Grammalidis and M.G. Strintzis, “Disparity and Occlusion Estimation in Multiocular Systems and their Coding for the Communication of Multiview Image Sequences,” IEEE Trans. Circuits and Systems for Video Technology, vol. 8, no. 3, pp. 328–344, June 1998. | [10] Grammalidis and M.G. Strintzis, “Disparity and Occlusion Estimation in Multiocular Systems and their Coding for the Communication of Multiview Image Sequences,” IEEE Trans. Circuits and Systems for Video Technology, vol. 8, no. 3, pp. 328–344, June 1998. | [11] Geoffrey McLachlan and Thriyambakam Krishnan. The EM Algorithm and Extensions. John Wiley & Sons, New York, 1996. | [12] L. Hong and G. Chen. Segment-based stereo matching using graph cuts. In CVPR, pages I: 74–81, 2004. | [13] M. Bleyer and M. Gelautz. A layered stereo matching algorithm using image segmentation and global visibility constraints. ISPRS Journal of Photogrammetry and Remote Sensing, 59(3):128–150, May 2005 | [14] J. Sun, N. Zheng, and H. Shum. Stereo matching using belief propagation. In ECCV, page II: 510 ff., 2002. | [15] Q. Y´ang, L. Wang, R. Yang, H. Stew´enius, and D. Nist´er. Stereo matching with color-weighted correlation, hierarchical belief propagation and occlusion handling. Accepted to CVPR 2006.
Volume : 1 | Issue : 3 | March 2012 ISSN - 2250-1991
PARIPEX - INDIAN JOURNAL OF RESEARCH X 171
Editor, PARIPEX - Indian Journal Of Research 8-A, Banans, Opp. SLU Girls College,New Congres Bhavan, Paldi, Ahmedabad-380006. Contact.: +91-8866003636 E-mail : [email protected]
Printed at Unique Offset, Novatsing Rupam Estate, Opp. Abhay Estate, Tavdipura, Shahibaug, Ahmedabad
Sara Publishing Academy PARIPEX - Indian Journal Of Research
Journal for All Subjects
International Index Journal For English, Hindi, Gujarati,
Marathi, Sanskrit