Embed Size (px)
Citation preview

7/28/2019 1.Advanced Robotic Pick and Place Arm and Hand _mems_system
http://slidepdf.com/reader/full/1advanced-robotic-pick-and-place-arm-and-hand-memssystem 1/2
www.svsembedded.com SVSEMBEDDED [email protected],
CONTACT: +91-- 9491535690, +91-- 7842358459
ADVANCED ROBOTIC PICK AND PLACE ARM AND
HAND SYSTEM
Abstract:
Robots which can perform desired tasks in unstructured environments without continuous
human guidance. Many kinds of robots are autonomous to some degree. Different robots can be
autonomous in different ways. A high degree of autonomy is particularly desirable in fields such
as space exploration, where communication and delays and interruptions are unavoidable.
Control of the robotic arm has been achieved successfully by using servo motors or dc
motors. The microcontrollers implement inverse kinematics algorithms and implement position
control on the motors. The motors are actuated using the internal PWM channels of the
microcontroller and MOSFET based power amplifiers or power transistors or driver circuits. The
robotic arm also has the provision of being controlled. The end effecter is a two finger gripper.
The robotic arm has a load bearing capacity of around 500gms. The device has its own in-built
logic and all the movements of the device are controlled by the motors. The operating speed of
the pick up arm can be varied to suit the requirement.
For a robot it is obviously important that it can operate from batteries. Since the
microcontroller runs with 5V the motors also must work with 3-5V. They must also not take too
much current as the batteries and the control circuit will get too big and heavy. For this design we
use an integrated motor driver chip, called l293d. The l293d motor driver chip can drive peak
loads up to 0.5A. The motors should therefore need less than 0.5A under worst conditions.
The good thing about this robot is that the hardware is somehow generic: It's basically 2
motors attached to a microcontroller. All the logic is implemented in the software. That means by
changing the software you can change almost everything as you like.
APPLICATIONS:
Cutting
Dispensing
Machine Load / Unload
Machine Tending
Material Handling
Polishing
www.svsembedded.com SVSEMBEDDED [email protected],
CONTACT: +91-- 9491535690, +91-- 7842358459

7/28/2019 1.Advanced Robotic Pick and Place Arm and Hand _mems_system
http://slidepdf.com/reader/full/1advanced-robotic-pick-and-place-arm-and-hand-memssystem 2/2
www.svsembedded.com SVSEMBEDDED [email protected],
CONTACT: +91-- 9491535690, +91-- 7842358459
Sealing
Software:
1. CVAVR IDE Tool
2. ISP Programmer 3. Embedded c programming
Hardware:
1. Microcontroller
2. LCD display
3. L293d driver IC
4. TSOP1738 IR receiver
5. TV REMOTE
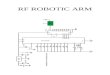
Block diagram:
www.svsembedded.com SVSEMBEDDED [email protected],
CONTACT: +91-- 9491535690, +91-- 7842358459
POWER
SUPPLY DISPLAY UNIT
MICRO
CONTROLLER
IR RECIVER
(TSOP1738)
L293D DRIVER
IC
MOTOR
1
MOTO
2
L293D DRIVER IC
MOTOR
1
MOTOR
1