-
8/6/2019 1993 Marino TAC IM Feedback Linearization
1/14
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 2, FEBRUARY
1993
Adaptive Inp ut-Output LinearizingControl of Induction
MotorsRiccardo Marino, Sergei Peresada, and Paolo Valigi
Abstract-A nonlinear adaptive state feedback
input-outputlinearizing control is designed for a fifth-order model
of aninduction motor which includes both electrical and m
echanicaldynamics under the assumptions of linear magnetic
circuits.The control algorithm contains a nonlinear identification
schemewhich asymptotically tracks the true values of the load
torquean d rotor resistance which are assumed to be constant
butunknown. Once those p arameters are identified, the two
controlgoals of regulating rotor speed and rotor flux amplitudeare
decoupled, so that power efficiency can be improved with-out
affecting speed regulation. Full state measurements
arerequired.
I. INT RODUCT IONN the last decade, significant advances have
been mad eI n the theory of nonlinear state feedback control
(see1151 and [39] for a comprehensive introduction to nonlin-ear
geometric control): in particular feedback lineariza-tion and
input-ou tput decoup ling techniqu es have proveduseful in
applications and applied even before the theorywas fully
developed.The technique of state feed back linearization [17],
[13]was developed in the effort of designing an autopilot
forhelicopters [37]. It requires m easurem ents of the s tatevector
x and knowledge of the parameter vector p inorder to transform a
multiinput nonlinear control system
(x E R " , U E R " , p E R q )
into a linear and controllable one ( z E R " , v E R " )i =A z +
Bv (2 )
Manuscript received June 1, 1990; revised May 17, 1991 and April
6,1992.Paper recommended by G. C. Verghese. This work was
supportedin part by Ministero della Universit; e della Ricerca
Scientifica eTecnologica.R. Marino and P. Valigi are with the
Dipartimento di IngegneriaElettronica, Seconda Universit; di Roma,
Via 0. Raimondo, 00173Rome, Italy.S . Peresada is with the
Department of Electrical Engineering, KievPolytechnical Institute,
Prospect Pobedy, 37 Kiev 252056 USSR.IEEE Log Number 9205180.
by means of nonlinear state feedback
(with B ( x , p ) a nonsingular m X m matrix V p E R9 ) an
dnonlinear state space change of coordinates
Linear control techniques can then be applied in thedesign of
the control U in (2). Necessary and sufficientconditions were
determined in [17] and [13] for a system(1 ) to be locally feedback
linearizable, i.e., transformableinto (2) via (3) and (4) n a
neighborhood of x,.They arerather restrictive from a mathe matical
po int of view. Nev-ertheless, they apply to detailed models of
helicopters[371, synchronous generators [311, switched
reluctancemotors [14] and permanent magnet stepper motors
[SI.Electromechanical systems are good candidates for non-linear
state feedback design since nonlinearities are oftensignificant and
exactly known being modeled on the basisof physical
principles.Whenever o utputs to be controlled a re defined as
y = h(x), y E R" (5 )the problem of making the input-output map
decoupledand linear by state feedback (3) has been addressed
andsolved in [111 and [16], following earlier applications
inrobotics. The decoupling state feedback may ren der som estates
unobservable from the outputs.Applications clearly indicate that
even though nonlin-earities may be exactly modeled, the physical
parametersinvolved are most often not precisely known. This
moti-vated further studies on adaptive versions of
feedbacklinearization and input-o utput linearization, since
cancel-lations of nonlinearities containing parameters arerequired.
For systems (1) which are linear with respect tothe unknown
parameters p , sufficient conditions foradaptive feedback
linearization were developed in [38]under sector type restrictions
on certain nonlinearitiesand in [441, [181, and [201 under
structural conditionswhich do not restrict the type of
nonlinearities. Differentapproaches for nonlinear adaptive
stabilization can befound in the survey paper [41]. Adaptive
input-outputlinearization was studied in [43] und er global
Lipschitzconditions on the nonlinearities multiplying
unknownparameters. More recently, the more difficult problem of
0018-9286/93$03.00 0 1993 IEEE
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
2/14
MARINO et al . : ADAPTIVE INPUT-OUTPUT L I N E A R I Z I N G
CONTROL OF INDUCTION MOTORS 209
output feedback adaptive control has been addressed in[35] and
[19] for single outp ut nonlinear systems.Even before the theory of
nonlinear feedback controlwas fully developed, nonlinear state
space change of coor-dinates (4) and nonlinear state feedback (3)
were pro-posed in [31 and [41 for induction mo tor control in ord
er toachieve an asymptotic decoupling in the control of speedand
flux amplitude (the so called field oriented control).Nested loops
of stand ard PI regulators are used in [27] toachieve robustness
versus parameter variations. In orderto counteract uncertainties
linear optimal control tech-niques and linear model reference
adaptive techniqueshave also been proposed in [ll and in [281, [61,
respec-tively. Decoupling is obtained only in steady state,
i.e.,when the flux amplitude is kept constant. Coupling is
stillpresent when flux is weakened in order to operate themotor a t
higher speed within the input voltage saturationlimits [27, p. 2171
or when flux is adjusted in order tomaxim ize pow er e fficiency
[26], [22]. A different approachwhich makes use of variable
structure techniques and ofnew sta te coor dinat es was proposed in
[42]. Nonadaptiveinput-output decoupling controls were present ed
in [29],[30], and [25] using geo me tric techniques (see also
[21]). In[25], a fifth-order model which includes the
mechanicalpart is used: exact decoupling in the control of speed
andflux amplitude is achieved by a static state feedbackcontrolle
r. I n [291 an d [301, a simplified model is used:only the
electromagnetic part is modeled assuming thespeed of a slowly
varying parame ter. E xact decoupling inthe control of electric
torq ue a nd flux amplitude using theamplitude and the frequency of
the voltage supply asinputs is obta ined in [29] by a dynamic
(second o rder )compensator and in [30] by a static state feedback
com-pensator. An indirect adaptive version of the
decouplingalgorithm p ropose d in [30] can b e found in [45], where
twoelectrical pa rameters are assumed to be unknown.The main result
of this paper is to develop an adaptiveversion of the con troller
prese nted in [25], assuming thatload torque and rotor resistance
are unknown but con-stant parameters. In Section I1 a fifth-order
state spacemodel of an induction motor, which includes both
electri-cal and mechanical dynamics, is given. In Section
111previous control schemes are reviewed and it is shownthat field
oriented control can be viewed as a feedbacktransformation which
achieves asymptotic input-outputdecoupling and linearization. It is
also established that themodel is not state feedback linearizable
and that thedynamics made unobservable by a state feedback
input-output linearizing control (zero dynamics) are due to
therotation of the flux vector. In Section IV an adaptiveversion of
the exact decoupling and linearizing controlgiven in [251 is
developed, which covers the mo re realisticsituation in which the
load t orque a nd the rotor resistanceare not known. Rotor
resistance may have a range ofvariation of +5 0% around its nominal
value due to rotorheating. Even though available nonlinear adaptive
resultsdo not apply as such to the model given in Section 11,
thekey idea in 1181 leads to a second-order nonlinear identi-
fication schem e which asymptotically tracks the true valueof
load torque and, when electric torque is different thanzero, the
true value of rotor resistance as well. Theadaptive state-feedback
linearizing control achieves fulldecoupling in speed and rotor flux
magnitude regulationas soon as the identification scheme has
converged to thetrue parameter values: this allows us to improve
powerefficiency by adjusting flux levels, without affecting
speedregulation. In Section V the effects of parameter
uncer-tainties on the performance of nonadaptive decouplingcontrol
are analyzed in detail and shown by simulations.Additional
simulations illustrate the performance of theproposed adaptive
control algorithm in speed and fluxamplitude regulation, showing
that voltage supply wave-forms are implementable by actual
inverters and currentsare within acceptable limits. The main
drawback is th erequirement of flux measurements: however,
preliminarysimulations repor ted in [36] indicate that the
proposedadaptive control maintains good performances even whenrotor
flux values a re provided by the observer given in [46]and driven
by rotor resistance estimates provided by theadaptation law.
Preliminary versions of this work wererepor ted in [33] and [34].
Additional simulation studiescan be found in [36].
11. IND UC TIO NOTORMODELThe reader is referred to [lo] and 1231
for the generaltheory of electric machines and induction motors, to
[27]for related control problems, and to [91 for digital
imple-mentations. The symbols used and their meaning arelisted in
the Appendix.An induction motor is made by three stator windingsand
three rotor windings. Krause and Thomas [241 intro-duced a two
phase equivalent machine representation (seethe Appendix for the
exact transformation of three phasevariables into two phase ones
used in this paper) with tworotor windings and two stator windings.
Their dynamics
are described byd*SOR,i,, +- U,,dtd*SbR,i,, +- uS bdt
(7 )
where R , , a) , U, denote resistance, current, flux linkage,and
stator voltage input to the machine; the subscripts sand r stand
for stator and rotor, ( a ,b) denote the compo-nents of a.ve ctor
with respect to a fixed stato r referenceframe, ( d ' , q ' )
denote the components of a vector withrespect to a fram e rotating
at spee d n p w ;and np denotesthe number of pole pairs of the
induction machine and o
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
3/14
210 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 2,
FEBRUARY 1993
the rotor speed. Let 6 denote an angle such thatd 6_ -t - n P w
, 6(0) = 0.
We now transform the vectors ( i r d , , , ,), @ r d t , @r q .
) in therotating frame ( d ' , q ' > into vectors ?irU,r b ) , (
$ r , , r,,) inthe stationary frame (a,b ) by
Applying transform ations (91, (10) and using equation (8),(6)
and (7) becomed*s,
d*SbR, i , , +- U, ,dt
dt, i , , +- U , hd*ruR,i,, +- n pw&,, = 0dt
Under the assumptions of linearity of the magnetic cir-cuits and
of equal mutual inductances and neglecting ironlosses, the magnetic
equations are (see [23, p. 1721)Ccsa = ' s i , , + Mi,,@sh = L s i
s b +$ru = M'su + r i r u$r b = + L r i r b (12)
where L,, L , are autoinductances and M is the mutualinductance;
as we shall see, the assumption of linearitywill be enforced by a
control action which will keep theabsolute value of the rotor flux
below the nominal value.The purpose of introducing the
transformations (9) an d(10) is precisely to obtain (12) which is
independent of 6:in fact fluxes and currents in (6) and (7) are
related by6-dependent auto and mutual inductances.Eliminating i,,,
i,, an d qbSu71+9,,, in (11) by using (12),we obtain
> U
R,i, , + --lC' ,b + ( L , - g)% = U , , ,L , dt
The torque produced by the machine is expressed in
terms of rotor fluxes and stator currents as
L r
so that the rotor dynamics are
where J is the moment of inertia of the rotor and of anytool
attached to it and TL is the load torque.By adding the rotor
dynamics (15) to the electromag-netic dynamics (13) and rearranging
the equations in statespace form, the overall dynamics of an
induction motorunder the assumptions of equal mutual inductances
andlinear magnetic circuit a re given by the fifth-order model:d w
n,,M T Ldt JL, J- ( * r a i s b - $r bi s o) - -
where i , +,uJ denote current, flux linkage and statorvoltage
input to the machine; the subscripts s and r standfor stator and
rotor; ( a , b ) denote the components of avector with respect to a
fixed stator reference frame and
From now on we will drop the subscripts r an d s sincewe will
only use rotor fluxes (+,,, q5rb) and stator currents(i,,, is,) as
state variables. Let
= 1 - ( M ~ / L , L , ) .
= ( $0, @b 7 i b ) T (17)
(18)be the state vector and let
P = ( ~ 1 3 ~ 2 ) ~( T L - T L N ~ R ~',,ITbe the unknown
parameter deviations from the nomi-nal values TLN an d R ,, of load
torque TL and rotorresistance R , . TL is typically unknown whereas
R , mayhave a range of variations of *50% around its nomi-nal value
(see [27, p. 2241) due to rotor heating. Let U =(uU,uh)' be the
control vector. Let (Y = ( R r , , , / L r ) ,p =( M / w L , L , )
, y = ( M 2 R , , / ~ L , L : ) + ( R , / ( T L , ) ,p = ( n ,M / J
L r ) , be a reparameterization of the inductionmotor model, where
a , p, y , p are known parameters
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
4/14
MARINO et al.: ADAPTIVE INPUT-OUTPUT LINEARIZING CONTROL O F
INDUCTION MOTORS 211
1 '
0 '
_ _J000
depending on the nom inal value R I N . ystem (16) can
berewritten in compact form as Since cos p = ($,/I I) I), sin p = (
& / I $I>, with I $ / =d m , ro m (24) an d (25) we have= f
( x ) uaga + ubgb 'Plfl +P2f2( ' ) (19) $ai, + $bibl d = I * Ihere
the vector fields f , g,, gb, f l , 2 are
(24)
(25)
cos p sin p(j: j = [ -sin p cos p ] (ja)'
f d x ) =
i2- n p w i , - ( Y M ~a p q d + v d+ npw id + a M - + U,
(30)
*d i d i ,np
f 2 ( x ) =
We now reinterpret f ield oriented control as a statefeedback
transformation (involving state space change ofcoordinates and
nonlinear state feedback) into a controlsystem of simpler
structure. Defining the state space(21) change of coordinateso =
w
$ d = &&-??*b*a
p = arctan -$sib - $bia1, = I * I
and the state feedback-1
the system (16) becomesd w T L_ -- p$diq -7dt
111. INDUCTIONMOTORCONTROLA. Field Oriented Control - - + a M i
dd- -dt
A classical control technique for induction motors is byBlaschke
131, [4] in 1971, it involves the transformation ofthe vectors ( i
a , b ) , +a , in the fixed stator frame ( a ,b)into vectors in a
frame ( d ,q )which rotate along with theflux vector (+,,
defining
did- - y i d + f f p & + n p w i , + a M 4 + -udi,i, 1_ - -
i , - pnpwt+!td- n p w i d- a M - + -U,i,dt
(29)
i2now the field oriented control. First introduced by dt *d u L
s
*d uL r-P = n p w + ~ M L .(23) dt *d*b
*ap = arctan -
Defining the nonlinear state feedback controlthe transformations
are
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
5/14
212 IEEE TRANSACTIONS ON AUTOMATIC CONTROL,VOL. 38, NO. 2,
FEBRUARY 1993
so that ( 28) becomes
the following closed-loop systemd o TLNdtd i ,dt
_ -- p@di9 -_ -- - i , + U,
If w an d thd are defined as outputs, field oriented
controlachieves asymptotic input-ou tput linearization
anddecoupling via the nonlinear state feedback (281, (341,(36) :PI
controllers are then used to counteract parametervariations.During
flux transient the nonlinear term i,bdiq in ( 32)makes the first
four equations in ( 32) still nonlinear andcoupled: as a result
speed transients a re difficult to evalu-ate a nd may be
unsatisfactory, Flux transients occur whenthe m otor has to be
operated above the nominal speed: inthis case flux weakening (for
instance = ( k / w r e f ) )srequired in order to keep applied
voltage within inverterceiling limits [27, p. 2171. Even when the
motor is oper-ated below the nominal spee d, flux may be varied in
orde rto maximize power efficiency (see [26] , 22]) .B.
Input-Output DecouplingAs shown in [25] see also [21]) , ield
oriented controlcan be improved by achieving exact input-output
decou-pling and linearization via a nonlinear state feedbackcontrol
which is not more complex than (31). We nowsummarize this technique
which will be made adaptive in
next section. The following notation is used for the
direc-tional (or Lie) derivative of state function +(XI: R" +
Ralong a vector field f ( x ) = ( f , ( x ) ; - . , n ( x ) )
- - f f $ b d + a M i dd- -dtd id- - y i d + U,dtdP i ( 3 2 )n p
w + ~ M X
is obtained. System ( 16) is transformed into ( 32) by
thefeedback transformation (271, (31 ).dynamics are linear
dt *d
( 3 7 )J+~ f $ C G f i ( x ) .System ( 32) has a simpler
structure: flux amplitude i = 1Iteratively, we define L$$ = L f ( L
' f -)$I.Define the change of coordinates (see also [ 4 2 ] )The
outputs to be controlled are w an d t + i,!~,'.- -d*d - -a+d + a M
i ddt
dtdid Y , = M X ) = w
T L N( 3 3 )-- -y id + U,Y 2 = L f + l ( x ) = p.(cGhib- * b i a
) --nd can be independ ently controlled by for instance via JY3 = $
A x ) = * + *PI controller, as proposed in [27]
= - k d l ( * d - * d r r e f ) - d Z / f ( * d ( T ) - q d r e
f ) d T .0( 3 4 )
When the flux amplitude $d is regulated to the constantreference
value I , ! J ~ ~ ~ ~ ,otor speed dynamics are also lin-eard w TL_
-- p*dref i q - -t Jdi,dt_ -- - i , + U, ( 3 5 )
y , = arctan (t= $3which is one to one in Q = (x E R5: 2 + @ #
O} but itis onto only for y 3 > 0, -90 s y , I 90. The
inversetransformation isw = Y l+a = & OS Y ,* h =6 in Y ,
1 Y + 2 a Y , 1 TLNnd can be independently controlled by U, ,
for instance bytwo nested loops of PI controllers, as proposed in
[271 i , = -(COSY5( 4 2 a M ) - - p Y 5 ( Y 2 +7))6
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
6/14
MARINO et al . : ADAPTIVE INPUT-OUTPUT LINEARIZING CONTROL O F
INDUCTION MOTORS 213
The dynamics of the induction motor with nominal para-meters are
given in new coordinates byY l = Y 2
Y 3 = Y 4
Y 5 = L f 4 3 . (40)
9 2 = L2f41 + LgaLf l U a + LgbLf l U b
Y 4 = L2f42+ LgaLf4 2 u a + LgbLf 4 2 u b
The first four equations in (40) can be rewritten as
- P n p o ( r C d i a + * b i b )L2fc#J2 ( 4 2 + 2 a 2 p M ) (
*2 + *+ 2 a M n p o ( Gaib- & , i n )
- ( 6 a 2 M + 2a')'M)( +aia + + b i b )+ 2a2M2( i , 2 + i,")and
D(x ) s the decoupling matrix defined as[ g k f ' 1 LgbLf " ' 1( x
) =
L g k f 42 Lg&f 42P P-- *b Z * aULs
2 a M= [ ? @a -$ bc+LS
Since
D ( x ) s nonsingular everywhere in Q .The dynamics of the flux
angle y , = 4 , ( x> area M
= n p o + =( *sib - * b i a )d4 3 d Y 5- - - -dr dr(45)
The difference between flux angular speed C$3 and rotorspeed n
pw is usually called slip speed, ws ,which can beexpressed,
recalling the expression of a , as
R r N M +sib - $ b ia4, - n p w = os=-, *2 + *
The input-output linearizing feedback for system (40)is given
by
where U = (ua, b)T is the new input vector. Substituting(47) in
(40) the closed-loop dynamics become in y-coordi-nates
Y1 = Y 23 2 = uaY 3 = Y 4Y 4 = ub
Equations (45) or (46) represent the dynamics which havebeen
made unobservable from the outputs o nd $2 + +by the state feedback
control (47). In order to trackdesired smooth reference signals or,
, (?)nd I +fe f ( t ) fo rthe speed y 1 = w and the square of the
flux modulusy , = 42 + &, the input signals U, an d q, n (47)
aredesigned asv a = - k a l ( Y l - or e f ( t ) ) - a 2 ( ~ 2- 4 e
f ( t ) ) + &ref ('1
= - k a l ( - orer - a2 ( P( *sib - ( l b ia )= - k , i ( y 3 -
I+IL)- b 2 ( y 4 - I4IL) + Ili;I:ef= -k b l ( lG b 2 + - +l:ef) - b
2 ( 2 a ( M ( $ a i a + * b i b )
-(*; + + - 4I:ef) + Ili;Ifef (49)where ( k a , , a 2 ) nd ( k b
l , b 2 ) re constant design param-eters to be determined in order
to make the decoupled,linear secon d-order systemsd 2 dz(- o r e f
) = - k a 1 ( - wref) - a 2 ~ ( - orer)
d 2- ( I + I ~ - +I:ef) = - k b 1 ( l + l 2 - qItef )dr 2d
- b 2 z ( l $ 1 2 - +I:ef) (50)asymptotically stable and to
shape their responses.
Remarks:1) The closed-loop system (48) is input-outputdecoupled
and linear: the input-output map consists of apair of second-order
systems. This allows for an indepen-dent regulation (or tracking)
of the outputs according to(50). Transient responses are now
decoupled also whenis varied, even independently of o r e f .his is
an
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
7/14
214 IEEE TRANSACTIONS ON AUTOMATIC CONTROL. VOL. 38, NO. 2,
FEBRUARY 1993
improvement over the field oriented control (see also[251).2)
Stat e space change of coordinates both in the fieldoriented
control and in the decoupling control [i.e., (27)and (39)] are
valid in the open set R = { x E R': $2 +$ # 0); notice that + + + =
0 is a physical singularityof the motor in starting conditions.3)
As in field oriented control, while measurementsof ( w , ,, i,) are
available, measurements of ($,, $b )require installing flux sensing
coils or Hall effect trans-ducers in the stator which is not
realistic in general-purpose squirrel cage machines.4) Easy
computations show that the induction motormodel (16) is not
feedback linearizable. Th e necessary andsufficient conditions
given in 1171 fail; in fact the distribu-tion gi = span {ga,g,, ad
fg,, ad,g b} is not involutivesince the vector field [adfg,, adfg,]
does not belong to 27,(ad ,Y or [X ,Y ] denotes the Lie bracket of
two vectorfields; one defines recursively ad kY = ad,(ad;l ' Y ) )
. ol -lowing the results in [32], since F0= span {g , , gh) is
invo-lutive and rank FI = 4, it turns out that the largest
feed-back linearizable subsystem has dimension 4. This shows
thatthe control (47), (49) provides the largest
linearizablesubsystem in the closed loop.5 ) The state feedback
control (47), (49) is essentiallythe o ne proposed in [25]. Th e
only additional contributionin this section is to make clear that t
he decoupling controlmakes the angle +3 unobservable from the
outputs andthat (16) is not feedback linearizable: this will be
impor-tant in the design of an adaptive control in next
section.Exact input-output decoupling controls for inductionmotors
are also proposed in [29], [30] with reference to asimplified
model: the mechanical dynamics in (16) are notconsidered and w is
viewed as a parameter in the lastfour equations of (16). In [29]
the inputs are constrainedto be of the formU, = v c o s 0ub = Vsin
0 (51)
an d two integrators are addedd V- U Idtd 0 -- U?
so that (ul,U , ) are the new inputs. The outputs are chosento
be the electric torque ( n , M / L , ) (+,i, - and therotor flux
amplitude square $2 + 0;. A nonlinear statefeedback control for uI
and u2 is obtai ned in [291 whichachieves input-output decoupling
and linearization whilemaking a two dimensional state space
submanifold unob-servable from the outputs. In [30] flux and
currents areexpressed in a rotating frame according to the
transforma-tions (24) and (251, where the dynamics of p ( t )
are
controlled by a third input U, so thatd P i- n, ]w + ~ M LU,.dt
*d (53)
The model consists of five states ( i d , i,, qd, )~,) and
isdriven by three controls. A nonlinear state feedback con-trol is
designed which decouples and linearizes the threecontrol actions of
regulating torque, rotor flux amplitudeand of forcing the reference
frame ( d , q ) to rotate alongwith the rotor flux vector while
making p unobservablefrom the outputs. Assuming two electrical
parametersunknown, an indirect adaptive version of this con trol
wasdeveloped and simulated in 1451.An input-output decoupling
control law in the d - qreference frame has also been proposed in
[211. Thecontrol algorithm is based on flux estimates provided byan
open-loop flux simulator. Following [12], rotor resis-tance errors
are computed in [21] on the basis of steady-state regulation errors
and used in the output feedbackcontrol algorithm in order to reduce
the steady-stateregulation errors. The performances of the overall
systemare verified by simulations and experimental tests.
IV . ADAPTIVEN P U T - O U T P U TINEAR IZATIONWhen a decoupling
control algorithm (47), (49) is used,variations in load torque TL
and rotor resistance R, causeloss of input -outpu t decouplin g,
steady-sta te trackingerrors and deteriorated transient responses.
This calls foran adaptive version of (47), (49) which will be
developedin this section under the assumptions that TL and R,
areunknown constant parameters. In this section an adaptivetracking
problem is addressed for a class of referencesignals satisfying the
following assumptions.Assumption I : The reference signals wJ t )
an d I$l;ef
( t ) are required to be C 2 bounded functions with
boundedderivatives such thatlim wrCf t ) = c , ,t'X
with c , ,c2 E R .Let us rewrite system (19) in the
y-coordinates definedby (38); since the Lie derivatives L f Z 4 1 ,
f , L f 4 1 ,L f , & ,zero, we haveLf1L,+2, f 1 4 3 >f 1 L f
2 4 2 ?g"439L g h 4 3 are all equal to
Y l = Y2 + P l L f l 4 I
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
8/14
MARINO et al.: ADAPTIVE INPUT-OUTPUT LINEARIZING CONTROL OF
INDUCTION MOTORS 215
where
T
6 a L , M L , + 2 M 3( $ a i , + $bib>?- UL,L)
( 5 5 )
An adaptive version of input-output linearizing controlswas
proposed in [43],which requires an overparameteriz-ation and global
Lipschitz property for the nonlinearitiesmultiplying the
parameters. Adaptive versions of feedbacklinearizing controls were
developed in [381 under sectortype restrictions on certain
nonlinearities, in [44]understructural matching conditions, in [18]
under extendedmatching conditions and, more generally, in
[20],underpure feedback conditions which do not require Lipschitzor
sector type restrictions. No one of the above tech-niques apply in
our case since the nonlinearities involvedare not globally
Lipschitz and the system is not feedbacklinearizable . How ever, we
will use the adapt ation te ch-nique proposed in [18] under the so
called extendedmatching structural condition and show directly the
con-vergence both of tracking errors and of parameterestimation
errors.Let 8 0 )= (b,(t>,i2( t )>T e a time-varying estimate
ofthe parameters and let
be the parameter error. Following [18] we introduce
atime-varying state space change of coordinates depending
on the parameters estimate @ ( t )21 = Y l2 2 = Y 2 +81Lf1412 4
= Y 4 +8 2 L f 2 4 22 3 =Y3
2 5 = y 5 .In z-coordinates system (19) becomes
2 , = 2 2 + e p , L f , 4 1i 2 = L2f4l + P 2 L f 2 L f 4 1+ Z L
f 1 4 18 ,
2 = L2f42+ P 2 L f 2 L f 4 2+ 7 L f 2 4 22
+ L g k f l U a + L g h L f 4 l U bi 3 = 2 4 + e p 2 L f 2 4
2
+82LfLf242 82P2L2f242+ U0(Lg0Lf42B2Lg.Lr242)+ U b ( L g b L f 4
2 + 8 2 L g b L f 2 4 2 )
is = Lf43 +P2Lf243Let ( 2 ) (a]
(57)
1g h L f 4 1LgbLf42+ 82Lg,Lf242
0 1 0 1K a = [ - k a l - k a 2 ] . Kb = [ - k b l - k b 2 ] ( 6
2 )are asymptotically stable; w,&), I $ f e r ( t ) are
referencesignals which satisfy Assum ption 1. Since
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
9/14
~
216 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 2,
EBRUARY 1993
the decoupling matrix is singular not only when($2 + $ = 0 as in
the no nadaptive case but also when$ , ( t ) = -R,,,,; this
additional singularity has to be takeninto account in the design of
the adaptive algorithm.Define the reference m odels
Th e model reference tracking error is defined ase ( 2 ] - I M 7
' 2 - 2 M 7 ' 3 - 3 M 9 ' 4 - 4 M ) (65)
and its dynamics are given byd l = e2 + e,,Lf,+l4 = -kulel -
kuze2 + e,2LfzL f+l4 e4 + f3,,2Lf2+2
4 = Lf+3 + P 2 L f 9 3e4 = - kb le3 - b2e4 + ' p ? ( L f 2L f +2
' $ 2 L ; 2 + 2 )
(66)with e i ( 0 )= 0, 1II .While the dynamics of z s are
the dynamics of the vector e can be rearranged as
whereK = block diag (K, ,Kh ) (69)
W ( z ,i2)s called th e regressor matrix and is a function ofthe
x-variables (and therefore of the z-variables).Le t P = block
diag(P,, P b ) be the positive definitesymmetric solution to th e
Lyapunov equation
K T P + P K = - Q (70)with Q = block diag, Q,, an d Qb positive
defi-
nite symmetric matrices. Consider the quadratic functionv = eTPe
+ e iT e , (71)
where r is a positive definite symm etric matrix. T he
timederivative of V is
If we now define
or, equivalently,
which defines the dynamics of the parameter estimate@ ( t ) , nd
use (701, then (72) becomesdVdt_ - -eTQe. (75)
This guarantees that e ( t ) and e,,, and therefore j X t >
,a rebounded and that e ( t ) s an L2 signal. Under Assumption1 fo
r ( w r e f ( t ) ,$I?,,f(t)), it follows from asymptotic
stabil-ity of (64) and from (65) that the first four state
variables(z1;.-, z 4 ) are bounded. We are guaranteed to avoid
thesingularities z 3 = 0 an d b2= - R r N for the decoupl-ing
matrix, and therefore for the control (59) as well,when the initial
conditions (e(0) = 0, e,(O)) are in S ={ ( e , ,) E R h : eTPe + e
i r e , I, v > 01, the largest setentirely contained in ((e, e P
)E R 6 : epz< R,, e3 > - c 2 } ,with c 2 given in Assumption
1. Since W ( z , 2 ) s continu-ous, contains only bounded functions
of z5 (sine andcosine), and ( z l , z 2 , z 3 , 4 , 2 ) are
bounded, it follows th atW(z , is bounded and therefore e and $ are
boundedas well. Now, since e is a bounded L2 signal with bounde
dderivative t , by Barbalat lemma ([40], p. 211) it followsthat
lim (1 e( ) 1 = 0, (7 6 )t'X
i.e., zero tracking error is achieved, both with respect tothe
reference model and to the reference signals. Further-mor e, since,
according to (671, is s bounded for ( e , e,) ES and the parameters
are assumed to be constant, itfollows that e = ( d / d t ) [Ke + W(
,$ ) e ] is bounded aswell. Hence, e being bounded, t? is uniformly
continuousan d (76) implies, by Barbalat lemma again, that2 . plim
IIi( t ) 1 = 0, (77)t + =
therefore it must be
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
10/14
MARINO el al . : ADAPTIVE INPUT-OUTPUT LINEARI ZING CONTROL OF
INDUCTION MOTORS 217
Equation (78) implies, from (55) and (681, that1
t , t - m Jlim Lfl+le,,(t) = lim - -e,,(t) = 0,M 2Iim
Lf,Lf+lep,( t ) lim -t - m t - m
= oi.e.,lim ep , ( t ) = 0,t - m
and, since by virtue of Assumption 1 l i m t - m T ( t ) = T L
,when TL f 0,lim e p , ( t ) = 0.I
Remark 6: The assumption that the initial conditionsbelong to
the set S is due to the existence of singularpoints for the
determinant (63). It follows that the largestz 3 ( 0 )= $I2(O) and
R r m i , re the largest are the allowableinitial condition errors
(e(O), e,(O)). It is therefore moreconvenient to start the adaptive
control algorithm whenthe squared flux amplitude l $ I 2 is far
from zero. On th eother end it can be seen from the model (16)
itself andfrom (43) that large values for R , make the control
taskeasier.In conclusion the results obtained can be summarizedas
follows.Theorem: Consider th e closed-loop system given by
theinduction motor model (19) and the adaptive dynamicstate
feedback control (591, (641, (74). Ifa> the unknown parameters p
, and p2 are constants,b) the reference signals (wre f ( t )
,$lfef(t)) satisfyAssumption 1,c) the initial conditions (40 ) = 0,
e,(O)> E S =( ( e ,e,,) E R 6 : eTPe + e;Te < v, v > O) ,
the largest
set entirely contained in (Le,) E R 6 : ep2< R , , e 3>
-cJ,then:
lim ( o ( t ) q e f ( t ) ) = 0,lim ( h ( t )- href( t ) )
0,
lim ( I $ ( t ) l - $ l r e f ( t ) ) = 07
(82)(83)(84)
t
t - m
t + m
whereMoreover if TL # 0, then
where
V. SIMULATIONSThe proposed control algorithm has been simulated
fora 15 KW motor, with rated torque 70 Nm and rated speed220 rad/s,
whose data are listed in the Appendix.
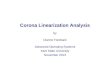
The simulation test involves the following operatingsequences:
the unloaded motor is required to reach therated speed and the
rated value of 1.3 Wb for rotor fluxamplitude ]$I, with the initial
estimate of rotor resistanceR , in error of +50%. At t = 2 s. a 40
Nm load torque,which is unknown to t he controller, is applied.
This impliesa reinitialization at t = 2 s. and the theorem given
inprevious section a pplies from 0 to 2 s. and from 2 s. on. Att =
5 s. the speed is required to reach 300 rad/s., wellabove the
nominal value, and rotor flux amplitude refer-ence is weakened
according to the rule I$lref(t) =( k / q e f ( t ) ) . he reference
signals for flux amplitud e andspeed, reported in Fig. 1, consist
of step functions,smoothed by means of second-order polynomials. A
smalltime delay at the beginning of the speed reference trajec-tory
is introduced in order to avoid overlapping betweenflux and speed
transients.Both nonadap tive (471, (49) and adaptiv e (59), (641,
(74)control laws have been simulated, with TLN= 0 an d
In the nonadaptive case, we observe from simulations(compare
Figs. 2, 3, and 4, where dashed lines stand forreference
trajectories, solid lines correspond to simulatedbehavior and
dotted line represents the electric torque)that the parameter
errors cause a steady-state error bothin speed and flux tracking;
they also cause a couplingbetween speed and rotor flux which is
noticeable bothduring speed transient and at load insertion ( t = 2
s.). Inorder to clarify the effects of unknown parameters,
con-sider the closed-loop system, obtained applying feedbackcontrol
(471, (491, for the simple case of a regulationproblem, to the
motor (19) [recall (5411:
R,N = 0.15 R.
i s = Lf43where 2 = ( C l , e,, e,, Z4IT = ( y l .- qef,, , y 3
;I$l;ef, y 4 I T , s the regulation error, with qef nd I$I
refconstant, K has the structure given in (62), (691, whileW * p
takes into account the effects of parameter uncer-
Authorized licensed use limited to: Seun k u Park. Downloaded on
June 2 2009 at 02:58 from IEEE X lore. Restrictions a l .
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
11/14
218 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 2,
FEBRUARY 1993:[TI~p Flux Am litude Referenceb'c) 200
100
0 2 4 6 8 0 2 4 6 8
v)
0 0.8Time (sec)ime (sec)(a) (b)
Fig. 1.
,...~~......
.............h-2- 1001v)
0 2 4 6 8
Flux Amplitude1.5 I
00 2 4 6 8Time (sec) Time (sec)
(a) (b)Fig. 3.
e
0 2 4 6 8 0 2 4 6 8Time (sec)ime (sec)
(a) (b)Fig. 4.
tainties [see (18)l. Matrix W* entries are given in (55) ,from
which it is easy to see that Lj,+1 is constant andL J 2 L f 4 1 s
proportional to the electric torque T . T heentry L f 2 + 2 s
proportional, via a nonzero constant, to thederivative of the
squared flux amplitude and therefore,once flux steady state is
achieved, LjZ+2= 0. The entryL J 2 L J & . an be rewritten as L
J 2 L J &= c,(d141~/dt)c 2 T 2 ,with c1 and c2 nonzero
constants. When electrictorque is zero and flux amplitude steady
state is achieved,LJ2LJ$b2= 0. U p t o 2 s., there is no load
torque so that
I 00 2 4 6 8 0 2 4 6 8
Time (sec) Time (sec)(a ) (b)o,2 True & Estimated
Resistanceo True & Estimated Load I I:20 I 0
( C ) (d)0 2 4 6 8 0 2 4 6 8
Time (sec)ime (sec)
Fig. 5.
p 1 = 0, he electric torqu e T is zero (excepting for a
shorttransient after the first smoothed step in desired speed,when
a coupling is noticed) and rotor flux dynamics reacha steady state
[Fig. 2(b)]: this implies zero steady-stateerro r according to th e
above analysis. This is confirmed bysimulation; we see (Fig. 2, 0 5
t 5 2) that speed and fluxsteady-state error is zero even if rotor
resistance is iner ror of +50%. Starting at load insertion (at t =
2 s.), th eelectric torque and p , are different that zero which
cause,according to (901, coupling and steady-state errors,
asconfirmed in Figs. 2(a) and 2(b). Notice that even ifthe load
torque were known (and therefore p1 = O),rotor resistance error ( p
2 # 0) would still cause a speedsteady-state error due to the entry
L f 2 L f 4 1which isproportional to the electric torque [see Figs.
3(a) and3(b)]. The dynamic responses when both parameters areknown
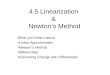
are reported in Fig. 4 for comparison.The adaptive case simulations
are reported in Figs. 5. Speed and flux amplitude behavior is shown
in Figs. 5(a)and 5(b), respectively, where solid lines represent
actualvariables, dashed lines the corresponding reference valuesand
dotted line the electric torque. In Figs. 5(c) and 5(d)load torque
and rotor resistance are respectively given,where solid lines
represent true parameter values anddashed lines the corresponding
estimates. The Q matrixin (70) has been chosen equal to the
identity matrix,the gain matrices K , an d K , have been chosen as(
k u 1 , a 2 )= (900,60), ( k , , ,k b 2 )= (900,60) and the
para-meter u pdate gain matrix r-' has been chosen as r- ' =diag (
l / y l , 1/y2) = diag (0 .4 ,8 X The dynamicperformances of the
adaptive control law are satisfactory:no steady-state errors occur
and transient responses aredecoupled, excepting for an initial
short time interval.During the first speed transient, due to a
wrong initialresistance estimate, a small flux error occurs. At the
sametime, due to the torque required to increase speed, rotor
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
12/14
MARINO et al.: ADAPTIVE INPUT-OUTPUT LINEARIZING CONTROL400
Applied voltage ua I 400 Applied voltage ua I
-400-0.5 1 1.5 2Time (sec)(a)
400 Applied voltage ua 1
.,,.. . . .. ... .... .. . .. ............,... ., . . ..-4wi 2:
s 3 3:5 !Time (sec)(b)
400 Applied voltaae ua I
"""."".".",-..",- 4 4 4'5 ; 5' 5 6
Time (sec)(0
, ,StatorC,went a,503- 0-50
0 0.5 1 1.5 2Time (sec)(a)
Stator Current ia
4 4.5 5 5.5 6Time (sec)(C)
Fig. 6.
Fig. 7.
.""6 6.5 7 1.5 8Time (sec)(4
Stator Current iaI I
2 2.5 3 3. 5 4Time (sec)
(b)Stator Current ia
6 6.5 7 7.5 8Time (sec)(4
resistance estimate quickly converges to the true valueand
complete decoupling is achieved. Fig. 6 shows thecontrol input
signal U,. Contro l action consists in varyingamplitude and
frequency of the applied voltage. Voltagesupply signals are well
within the capabilities of actualinverters and therefore can be
easily implemented bycurrent power electronic technology (see [91).
Fig. 7 showsthe i, current waveform.As already rem arked the
availability of flux measure-ments is an unrealistic assumption.
However in the litera-ture several asymptotic flux observers have
been p roposed[7], [8], [2], [461, which are rather sensitive to
rotor resis-tance variations. In [361 a simulation study is
reported fora control scheme in which the observer proposed in
[46]
OF INDUCTION MOTORS 219
provides, on the basis of rotor speed and stator
currentmeasurements, rotor flux and stator current estimates tothe
adaptive control (591, (741, while rotor resistanceestimates are
provided to the observer by the identifica-tion algorithm (74):
those preliminary simulations showthat a good performance is still
maintained.
VI. CONCLUSIONIn this paper we propose, for a detailed
nonlinearmodel of an induction motor, an adaptive
input-outputdecoupling control which has some advantages over
theclassical scheme of field oriented control. With a compa-rable
complexity exact decoupling between speed and fluxregulation is
achieved and two critical parameters (rotorresistance and torque
load) are identified by a convergingsecond-order identification
algorithm. The m ain drawbackof the proposed control is the
requirement of flux mea-surements. H owever, nonlinear flux
observers from statorcurrents and rotor speed measurements have
beenobtain ed in [46], and preliminary simulations show a
satis-factory perform ance of the proposed algorithm even when
flux signals are provided by the observers given in
[46].Additional research should analyze the influence ofsampling
rate, truncation errors, measurement noise, sim-plifying modeling
assumptions, unmodeled dynamics andsaturations. Moreover, the
induction motor control prob-lem should motivate additional
research on nonlinearmultivariable output feedback adaptive
control, since onlysingle output systems have been so far
considered in thenonlinea r adaptive litera ture (see [19] and
[351).APPENDIX
Induction Motor Datastator resistance (0.18 Q )rotor resistance
(0.15 0)stator currentstator flux linkagerotor currentrotor flux
linkagevoltage inputangular speed (220 rad/s ) ratednum ber of pole
pairs 1angle of rotationstato r inductanc e (0.0699 H )rotor
inductance (0.0699 H )mutua l inductan ce (0.068 H )rotor inerti a
(0.0586 Kgm2)load torque (70 N m ) ratedelectric motor to rque
(1.3 Wb) rated
(rated power 15 Kw)
The changes of variables which transform the motorequation in
the original three phase system to the equiva-lent two phase
reference frame (see [23, p. 135 and 1701)
Authorized licensed use limited to: Seungkyu Park. Downloaded on
June 2, 2009 at 02:58 from IEEE Xplore. Restrictions apply.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
13/14
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 38, NO. 2, FEBRUARY
1993
2 Tcos p - -2?r-sin p --3
12 --
220
are given by:
[21] D. Kim, I. Ha., and M. KO, Control of induction motors
viafeedback linearization with input-output decoupling, Intemat.
J.Contr., vol. 51, no. 4, pp. 863-883, 1990.1221 D. S. Kirschen, D.
W. Novotny, and T.A. Lipo, Optimal efficiencycontrol of an
induction motor drive, IEEE Tran s. EnergV Co nu .,vol. EC-2, no.
1, pp. 70-75, Mar. 1987.[23] P. C. Krause, Analysis of Electric
Machinely. New YorkMcGraw-Hill, 1986.[24] P. C. Krause and C. H.
Thomas, Simulation of symmetrical
. (91)
2r rcos p + -os p1 32r r3K , = I -sin p -sin p + -
where D is given bv (23).REFERENCES
A. Bellini, G. Figalli, and G. Ulivi, A microcomputer
basedoptimal control system to reduce the effects of the
parametervariations and speed measurements errors in induction
motordrives, IEEE Trans. Indust. Appl., vol. IA-2, no. 1,pp. 42-50,
1986.-, Analysis and design of a microcomputer-based observer foran
induction machine, Automatica, vol. 24, no. 4, pp. 549-555,1988.F.
Blaschke, Das prinzip der feldorientierung, die grundlagef i r die
transvector regelung von asynchronmaschienen, Siemens-Zeitschriji,
vol. 45, pp. 757-760, 1971.-, The principle of field orientation
applied to the newtransvector closed-loop control system for
rotating field machines,Siemens-Rev, vol. 39, pp. 217-220, 1972.M.
Bodson and J. Chiasson, Application of nonlinear controlmethods to
the positioning of a permanent magnet stepper motor,in Proc. 28th
Int. Conf Decision Contr., Tampa, FL, 1989, pp.C. C. Chan, W. S.
Leung, and C. W . Ng, Adaptive decouplingcontrol of induction motor
drives, IEEE Trans. Indust. Electronics,vol. 37, no. 1, pp. 41-47,
Feb. 1990.Y. Dote, Existence of limit cycle and stabilization of
inductionmotor via new nonlinear state observer, IEEE Trans.
Automat.Contr., vol. AC-24, no. 3, pp. 421-428, June 1979.-,
Stabilization of controlled current induction motor drivesystem via
new nonlinear state observers, IEEE Trans. Ind. Elect.Contr.,
Instrum., vol. IECI-27, pp. 77-81, May 1980.-, Servo Motor and
Motion Control Using Digital Signal Proces-sors.A. E. Fitzgerald,
C. Kingsley, Jr., and S . D. Umans, ElectricMachinery. New York:
McGraw-Hill, 1983.E. Freund, The structure of decoupled nonlinear
systems, Int. J.Contr., vol. 21, no. 3, pp. 443-450, 1975.L. J.
Garces, Paramete r adaptation for speed-controlled static ACdrive
with a squirrel-cage induction motors, IEEE Trans. Indust.Appl.,
vol. IA-16, no. 12, pp. 173-178, Mar. 1980.L. R. Hunt, R. Su , and
G. Meyer, Design for multiinput nonlinearsystems, in R. W .
Brockett, R. S . Millman, and H. J. Sussmann,Eds., Differential
Geometric Control Theory. pp. 268-298,Birkhauser, Boston, 1983.M.
Ilic-Spong, R. Marino, S. Peresada, and D. G. Taylor, Feed-back
linearizing control of switched reluctance motors, IEEETrans.
Automat. Contr., vol. AC-32, no. 5, pp. 371-379, May 1987.A.
Isidori, Nonlinear Control Systems. Communications and Con-trol
Engineering Series. Berlin: Springer-Verlag, second ed., 1989.A.
Isidori, A. J. Krener, C. Gori Giorgi, and S . Monaco, Nonlin-ear
decoupling via feedback A differential geometric approach,IEEE
Trans. Automat. Contr., vol. AC-26,pp. 331-345, 1981.
531-532.
Englewood Cliffs, NJ: Prentice-Hall, 1990.
at the 10th IFAC World Congress, pp. 349-354, Munich, 1987.A.
Kusko and D. Galler, Control means for minimization oflosses in AC
and DC motor drives, IEEE Trans. Indust. Appl ., vol.IA-19, no. 4,
pp. 561-570, July/Aug. 1983.W. Leonhard, Control of Electrical D
rives. Berlin: Springer-Verlag,1985.C. M. Liaw, C. T. Pan, and Y.
C. Chen, An adaptive controll er forcurrent-fed induction motor,
IEEE Trans. Aerosp. Elect. Sys t., vol.24, no. 3, pp. 250-262,
1988.A. De Luca and G. Ulivi, Dynamic decoupling of voltage
fre-quency controlled induction motors, presented at the 8th
Int.Conf Analysis Optimiz. Syst., pp. 127-137, INRIA, Antibes,
1988.-, Design of exact nonlinear controller for induction
motors,IEEE Trans. Automat. Contr., vol. 34, no. 12, pp. 1304-1307,
Dec.1989.R. Marino, An example of nonlinear regulator, IEEE
Trans.Automat. Contr.,vol. AC-29, pp. 276-279, Mar. 1984.-, On the
largest feedback linearizable subsystem, Syst. &[email protected]. ,
vol. 6, pp. 345-351, Jan. 1986.R. Marino, S. Peresada, and P.
Valigi, Adaptive partial feedbacklinearization of induction motors,
in Roc . 29 th Conf DecisionContr., pp. 3313-3318, Honolulu, HI,
1990.-, Adaptive nonlinear control of induction motors via
extendedmatching, P. V. Kokotovic, Ed., Foundations of Adaptitre
Control,(Lecture Notes in Control and Inf. Sciences). Berlin:
Springer-Verlag, pp. 435-454, 1991.R. Marino and P. Tomei, Global
adaptive observers and output-feedback stabilization for a class of
nonlinear systems, P. V.Kokotovic, Ed., Foundations of Adaptiue
Control, (Lecture Notes inControl and Inf. Sciences). Berlin:
Springer-Verlag, pp. 455-493,1991.R. Marino and P. Valigi,
Nonlinear control of induction motors: Asimulation study, in Proc.
1991 European Contr. Conf ,Grenoble,France, 1991, pp. 1057-1062.G.
Meyer, R. Su , and L. R. Hunt, Application of
nonlineartransformation to automatic flight control, Automatica,
vol. 20,no. 1, pp. 103-107, 1984.K. Nam and A. Aropostathis, A
model reference adaptive cont rolscheme for pure feedback nonlinear
systems, IEEE Trans.Automat. Contr.,vol. 33, pp. 803-811, 1988.H.
Nijmeijer and A. J. van der Schaft, Nonlinear Dynamical
ControlSystems. Berlin: Springer-Verlag, 1990.V. H. Popov,
Hyperstability of Control Systems. Berlin: Springer-Verlag, 1973.L.
Praly, G. Bastin, J. B. Pomet, and Z. P. Jiang,
Adaptivestabilization of nonlinear systems, P. V. Kokotovic, Ed.,
Founda-tions of Adaptbe Control (Lecture Noes in Control and Inf.
Sci-ences). Berlin: Springer-Verlag, pp. 347-433, 1991.
-
8/6/2019 1993 Marino TAC IM Feedback Linearization
14/14
MARINO et al.: ADAPTIVE INPUT-OUTPUT LINEARIZING CONTROL OF
INDUCTION MOTORS 221[42] A. Sabanovic and D. Izosimov, Application
of sliding modes toinduction motor control, IEEE Trans.Indust.Appl.
, vol. IA-17, no.1, pp. 41-49, Jan./Feb. 1981.[43] S. S. Sastry and
A. Isidori, Adaptive control of linearizablesystems, IEEE Trans.
Automat. Contr., vol. 34, pp. 1123-1131,1989.[44] D. G. Taylor, P.
V. Kokotovic, R. Marino, and I. Kanellakopoulos,Adaptive regulation
of nonlinear systems with unmodeled dynam-ics, IEEE Trans. Automat.
Contr.,vol. 34, pp. 405-412, 1989.[45] A. Teel, R. Kadiyala, P.
Kokotovic, and S. S. Sastry, Indirect
techniques for adaptive input-output linearization of
nonlinearsystems, Int. J. Contr.,vol. 53, pp. 193-222, 1991.[46] G.
C. Verghese and S. R. Sanders, Observers for flw estimationin
induction machines, IEEE Trans. Indust. Elect., vol. 35, no. 1,pp.
85-94, Feb. 1988.
Riccardo Marino was born in Ferrara, Italy, in1956. He received
the degree in nuclear engi-neering, in 1979, and the Masters degree
insystems engineering, in 1981, both from theUniversity of Rome La
Sapienza, Rome, Italy.He received the Doctor of Science degreein
system science and mathematics fromWashington University, St.
Louis, MO, in 1982.Since 1984, he has been with the Departmentof
Electronic Engineering at the University ofRome Tor Vergata, Rome,
Italy where he iscurrently Professor of systems theory. He visited
the University ofIllinois at Urbana-Champaign, IL, during the
academic years of 1985-86and 1988-89 and the University of Twente,
The Netherlands, in 1986.His research interests include theory and
applications of nonlinearcontrol and, more recently, nonlinear
adaptive control.
Sergei M. Peresada was bom in Donetsk, USSR,on January 14, 1952.
He received the Diplomaof Electrical Engineer from Donetsk
Polytechni-cal Institute, Donetsk, in 1974 and the Candi-date of
Sciences degree in electrical engineeringfrom the Kiev
Polytechnical Institute, Kiev, in1983.From 1974 to 1977 he was a
Research Engi-neer in the Department of Electrical Engineer-ing,
Donetsk Polytechnical Institute. Since 1977he has been with the
Department of ElectricalEngineering, Kiev Polytechnical Institute,
Ukraine, where he is currentlyDocent (the equivalent of Associate
Professor in the US). From 1985 to1986 he was a Visiting Professor
in the Department of Electrical andComputer Engineering, University
of Illinois at Urbana, Champaign. Hisresearch interests are
applications of modem control theory (nonlinearcontrol, adaptation,
VSS control) in electromechanical systems, modeldevelopment, and
control of electrical drives and internal combustionengines.
Paolo Valigi received the B.S. degree in elec-tronic engineering
from the University of RomeLa Sapienza, in 1986 and the Ph.D.
degreefrom the University of Rome Tor Vergata, in1991.From 1986 to
1991 he has been at the Depart-ment of Electronic Engineering,
University ofRome Tor Vergata. In 1989 he was a visitingscholar, at
the Coordinated Science Laboratory,University of Illinois at Urbana
Champaign. Hisresearch interests are in nonlinear control,robust,
and adaptive control, queueing systems, and robotics.