Embed Size (px)
Citation preview
17/12/200117/12/2001 "SUMARE" Workshop - Nice"SUMARE" Workshop - Nice 11
SWIMMERSWIMMERSSubseaubsea
WWorkork
IInspection &nspection &
MMaintenance withaintenance with
MMinimuminimum
EEnvironmentnvironment
RRovov
17/12/2001 "SUMARE" Workshop - Nice 2
Presentation Overview
Limitations of ROV operations on deepwater fields
The hybrid ROV / AUV solution System components and mode of
operation
Sea Trials
17/12/2001 "SUMARE" Workshop - Nice 3
Project Partners
Project supported by the European Commission (THERMIE Programme)
•Approach Sonar System
•Long Range Positioning System
•Acoustic Communications
•Technical Advisory
•General Advisory
17/12/2001 "SUMARE" Workshop - Nice 4
ROV operation indeep water fields - Drawbacks :
Permanent surface support (DP Vessel) Significant cost
90% of the total spread cost (typically) Availability
Time for mobilisation Weather conditions
Umbilical / Tether management Increasing size / length of umbilicals Low Reliability of associated components (slip rings,
connectors…) - 85% of break downs
… Is it possible to avoid this ?
17/12/2001 "SUMARE" Workshop - Nice 5
Deepwater FieldSubsea Installations
Statement : Subsea facilities are linked to the surface production unit by a Production Umbilical
The basic idea is to :
Tap the ROV power and data communication from the sub-sea facilities through the production umbilical
Operate the ROV from the surface production facilities
17/12/2001 "SUMARE" Workshop - Nice 6
The SWIMMER Solution :An Hybrid ROV / AUV
AUV Shuttle for flying a standard ROV from surface to sub-sea facilities
– No surface / vehicle physical link during transit phase
– Uses simple permanent sub-sea installation Docking station connected to production umbilical
– No limitation on ROV tasks Real-time controlled and powered up from the surface
through production umbilical
17/12/2001 "SUMARE" Workshop - Nice 7
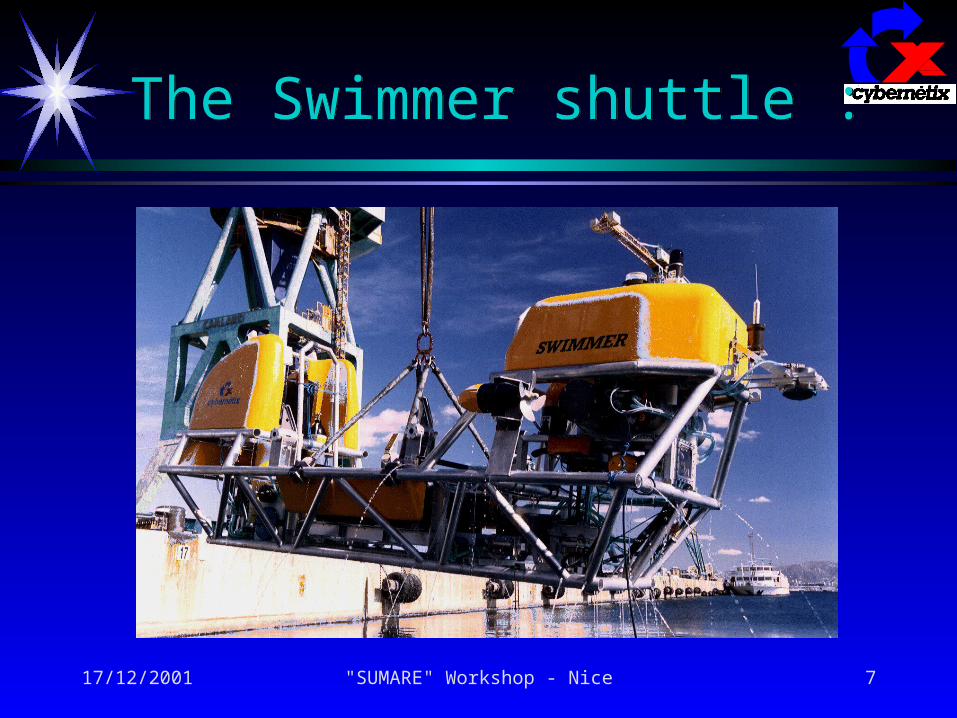
The Swimmer shuttle :The Swimmer shuttle :

17/12/2001 "SUMARE" Workshop - Nice 8
Sea TrialsSea Trials
Video
17/12/2001 "SUMARE" Workshop - Nice 9
Long Range Positioning System& Acoustic Communication
Hybrid LBL / Dead Reckoning Long Range Positioning System On-board absolute position calculation Metric accuracy Solves multiple path problems Vehicle motion compensation
Bi-directional Acoustic Telemetry Link 20 bits/s data rate Half duplex
1 acoustic system : 10 km slant range Ultra-high reliability and
noise immunity Use CHIRP modulation
17/12/2001 "SUMARE" Workshop - Nice 10
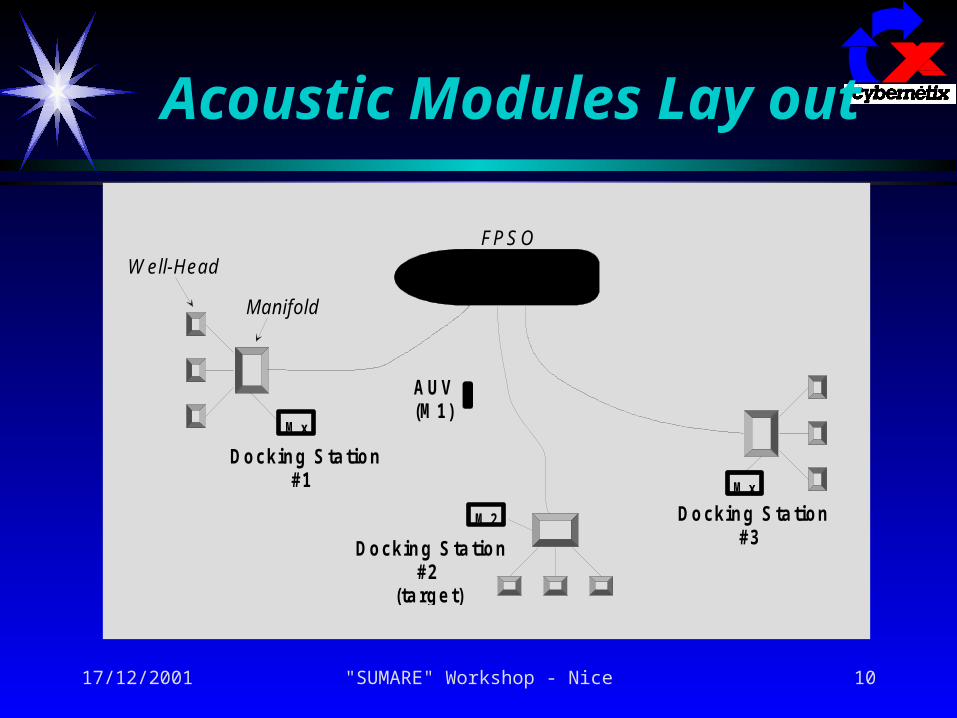
Acoustic Modules Lay out
FPSO
Docking S ta tion#1
W ell-Head
Manifold
Docking S ta tion#2
(ta rge t)
Docking S ta tion#3
M x
AUV(M 1)
M x
M 2
17/12/2001 "SUMARE" Workshop - Nice 11
Short Range Positioning System
Approach on Docking Station requires : Decimetric accuracy
100 m range
No active system on the Docking Station
On-board SONAR image 3D processing : Uses 2 profiling sonars Accuracy increases as distance to
target decreases Positioning data refresh rate : 1 Hz
17/12/2001 "SUMARE" Workshop - Nice 12
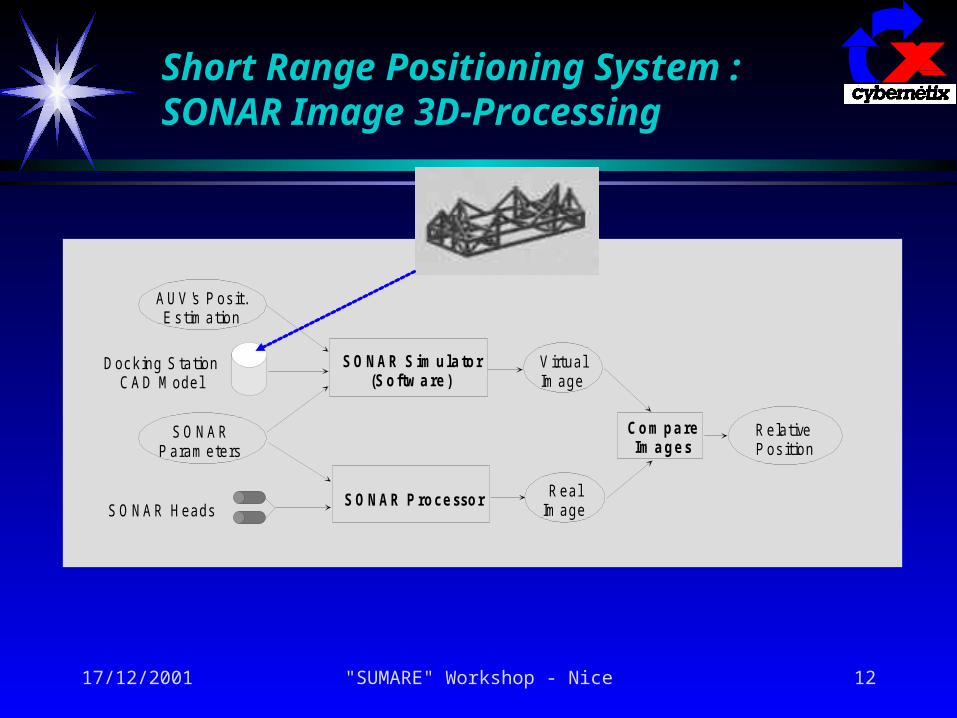
Short Range Positioning System :SONAR Image 3D-Processing
Dock ing S tationCAD Model
S O NAR S im ula tor(S oftw a re )
AUV's Pos it.Estimation
SONARParameters
S O NAR P roce ssorSONAR Heads
VirtualImage
RealImage
Com pa reIm a ge s
RelativePos ition
17/12/2001 "SUMARE" Workshop - Nice 13
ConclusionsConclusions
• By achieving a first fully automatic docking operation of Swimmer on its station (October 2001), the feasibility of Hybrid vehicles has been demonstrated.
• Intense R&D efforts still have to be deployed to reach an operational stage (up to 2005 ?).





























