Embed Size (px)
Citation preview

Physics 178/278 - David Kleinfeld - Winter 2021 - Lesson 17
Revised 4 March 2021 2:05
17 Balanced feedback networks: Noise, synaptic
scaling, and linear response. Part 2
17.1 Circuit model
So far we have only address noise and scaling at the level of noise in individual cells.Nor we analyze a network of neurons with balanced inputs. We now consider theconsequences on the choice of connections in a network to maintain the balancedstate.
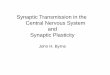
Figure 1: Feedback circuit model with two populations of neurons
.
Consider a network of a population of interconnected excitatory (E) and in-hibitory (I) cells.The full equations are
τEdV E
i (t)
dt+ V E
i (t) =[β(µEi (t)− θEi )
]+
(17.1)
τIdV I
i (t)
dt+ V I
i (t) =[β(µIi (t)− θIi )
]+
where [· · ·]+ is the Heavyside function, τE and τI are the cellular time constant, βis the conversion gain, and the θEi and θIi are thresholds. The inputs are
µEi (t)− θEi = µEext(t) +K∑j=1
WEEi,j V
Ej (t) +
K∑j=1
WEIi,j V
Ij (t) (17.2)
µIi (t)− θIi = µIext(t) +K∑j=1
W IIi,j V
Ij (t) +
K∑j=1
W IEi,j V
Ej (t).
1

As in the case of the model cell, we will scale the synaptic inputs by 1/√K, as
opposed to 1/K, i.e.,
WEEij →
WEE
√K
; W IIij → −
W II
√K
; WEIij → −
WEI
√K
; W IEij →
W IE
√K
(17.3)
where we explicitly put in the negative signs of inhibition. As will soon be clear, weneed to scale the external inputs by
µEext(t)→√K E mext(t) and µIext(t)→
√K I mext(t) (17.4)
where E and I are inputs of strength of O(1). All together, we have
µEi (t)− θEi =√KEmext(t) +
WEE
√K
K∑j=1
V Ej (t)− WEI
√K
K∑j=1
V Ij (t) (17.5)
µIi (t)− θIi =√KImext(t) +
W IE
√K
K∑j=1
V Ej (t)− W II
√K
K∑j=1
V Ij (t).
In terms of the order parameters,
µE(t)− θEi =√KEmext(t) +
√KWEE 1
K
K∑j=1
V Ej (t)−
√KWEI 1
K
K∑j=1
V Ij (t)
=√KEmext(t) +
√KWEEmE(t)−
√KWEImI(t) (17.6)
=√K[Emext(t) +WEEmE(t)−WEImI(t)
]and
µI(t)− θIi =√KImext(t) +
√KW IE 1
K
K∑j=1
V Ej (t)−
√KW II 1
K
K∑j=1
V Ij (t)
=√K[Imext(t) +W IEmE(t)−W IImI(t)
]. (17.7)
As√K →∞ the left hand side goes to zero and the equilibrium state will satisfy
0
(1√K
)= Emext(t) +WEEmE(t)−WEImI(t) (17.8)
0
(1√K
)= Imext(t) +W IEmE(t)−W IImI(t).
The implication of this equilibrium condition is that the average input remains finiteas the fluctuations remain large. This is the balanced state.
Solving the above gives relations for the equilibrium activity of the excitatoryand inhibitory cells in terms of the external drive:
m0E =
W IIE −WEII
WEEW II −WEIW IEmext. (17.9)
2

and
m0I =
W IEE −WEEI
WEEW II −WEIW IEmext. (17.10)
Another issue is that rapid feedback prevents the occurance of significant corre-lations. this depends of having faster inhibitory than excitatory synapses, as occursfor GABA-A, but not GABA-B.
We made many severe assumptions regarding this model, so these equations serveonly to illustrate a few keys points.
1. The equilibrium values of activity moE and mo
I must be both positive andbounded by 1. This constrains the values of the synaptic weights.
2. Both the activity of the excitatory and the inhibitory populations are lin-early proportional to the input, matching experimental observations of linearresponse with balanced networks.
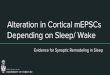
3. A paradoxical effect is that increasing the external inhibitory input, i.e., I, willincrease both mE and mI , can in term increase νI(t) and can lead t increasedspiking of inhibitory cells. This is a feedback effect where reduced inhibitoryinput increase the activity of the excitatory cells that drive inhibition.
Figure 2: Linear response of network as we drive inhibition. From Li, Chen, Guo, Chen, Huo, Inagaki, Chen,Davis, Hansel, Guo and Svoboda, eLIFE 2019.
Another issue is that rapid feedback prevents the occurence of significant corre-lations. this depends of having faster inhibitory than excitatory synapses, as occursfor GABA-A, but not GABA-B.
17.1.1 Stability and response speed
We return to the full network equations and look at the variation around the equi-librium value of mE and mI . Taking the time constants, gains, and thresholds to
3

Figure 3: Balanced networks have emergent variability. From Shadlen and Newsome, Current Opinion inNeurobiology, 1994.
Figure 4: Balanced networks asynchronous dynamics. rom Shadlen and Newsome, Current Opinion in Neuro-biology, 1994.
be the same for the E and I populations and letting
δmE(t) = mE(t)−moE (17.11)
δmI(t) = mI(t)−moI
we have
τd δmE(t)
dt+ δmE(t) =
[β√K(WEEδmE(t)−WEIδmI(t)
)]+
(17.12)
τd δmI(t)
dt+ δmI(t) =
[β√K(W IEδmE(t)−W IIδmI(t)
)]+.
When the neurons are active, this reduces to the linear equations
τd δmE(t)
dt+ δmE(t) = β
√K(WEEδmE(t)−WEIδmI(t)
)(17.13)
τd δmI(t)
dt+ δmI(t) = β
√K(W IEδmE(t)−W IIδmI(t)
).
These linear equations are solved by taking δmE(t) ∝ eλt, etc., so that
(λτ + 1) δmE(t) = β√K(WEEδmE(t)−WEIδmI(t)
)(17.14)
(λτ + 1) δmI(t) = β√K(W IEδmE(t)−W IIδmI(t)
)4

Figure 5: Asynchronous dynamics requires faster inhibition than excitation. From Brunel and Wang, Journalof Neurophysiology, 2003
Figure 6: Fast inhibition is the norm
which requires that∣∣∣∣ β√KWEE − 1− λτ −β√KWEI
β√KW IE −β
√KW II − 1− λτ
∣∣∣∣ = 0 (17.15)
and leads to
λ1,2 =1
τ
β√K (WEE −W II)− 2
2±
√√√√(β√K (WEE −W II)− 2
2
)2
− β2K W IEWEI
−−−−−→K →∞ β
√K
τ
WEE −W II
2±
√(WEE −W II
2
)2
− W IEWEI
(17.16)
=β√K
τ
[WEE −W II
2
][1±
√(1− 4
W IEWEI
(WEE −W II)2
)].
The system is stable only if the real part of λ1,2 < 0. This implies
W II > WEE (17.17)
5

which is a prediction for connectomic analysis. We note that, by construction,W IEWEI > 0. The response time of the system is shortened by a factor of
√k, i.e.,
τ
β→ τ
β√K)
O(1)
The change in speed has not been properly measured. But a sudden jump in theexcitation of cortical input leads to an observed time-constant of about 10 ms. Thisis not very different from estimated fro bear neurons
Figure 7: Relaxation of the signal in V1 cortical neurons after shut-down of thalamus. From Reinhold, Lien andScanziani, Nature Neuroscience, 2015
6