Embed Size (px)
Citation preview

160 Lecture Notes
Phil Rubin
Under continuous revision.If you want a final version of a lecture, wait untilafter it is given.
Last revised: April 26, 2006

Contents
1 Background Material 71.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Concepts and Definitions: A Vocabulary . . . . . . . . . . . . . . . . 71.3 Units, Dimensions, and Physical Entities . . . . . . . . . . . . . . . .8
1.3.1 Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.4 Dimensional Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Scalars and Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.6 Vectors: Graphical Representation . . . . . . . . . . . . . . . . . . .9
1.6.1 Graphical Addition . . . . . . . . . . . . . . . . . . . . . . . 101.6.2 Graphical Subtraction . . . . . . . . . . . . . . . . . . . . .10
1.7 Vectors: Component Representation . . . . . . . . . . . . . . . . . .101.7.1 Computing Vector Components . . . . . . . . . . . . . . . .111.7.2 Vector Addition with Components . . . . . . . . . . . . . . .11
1.8 Vectors: Unit Vectors . . . . . . . . . . . . . . . . . . . . . . . . . .121.8.1 Unit Vectors Along Axes . . . . . . . . . . . . . . . . . . . . 12
1.9 Vectors: Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . 121.9.1 Multiplication of a Vector by a Scalar . . . . . . . . . . . . .121.9.2 Scalar or Dot Product of Two Vectors . . . . . . . . . . . . .131.9.3 Vector or Cross Product of Two Vectors . . . . . . . . . . . .14
2 Rectilinear Motion 172.1 Position and Displacement . . . . . . . . . . . . . . . . . . . . . . .172.2 Instant and Interval of Time . . . . . . . . . . . . . . . . . . . . . . .182.3 s− t Histories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.4 Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.1 Average Velocity . . . . . . . . . . . . . . . . . . . . . . . . 202.4.2 Instantaneous Rectilinear Velocity . . . . . . . . . . . . . . .20
2.5 Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212.5.1 Instantaneous Rectilinear Acceleration . . . . . . . . . . . . .212.5.2 Uniformly Accelerated Rectilinear Motion . . . . . . . . . .222.5.3 An Example Problem . . . . . . . . . . . . . . . . . . . . . .24
3 Planar Motion with Constant Acceleration 283.1 An Example Problem . . . . . . . . . . . . . . . . . . . . . . . . . .31
2

CONTENTS 3
4 Introduction to Newton’s Laws of Motion 334.1 Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .334.2 Newton’s Laws of Motion . . . . . . . . . . . . . . . . . . . . . . . 334.3 Weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.4 Inertial and Non-inertial Reference Frames . . . . . . . . . . . . . .344.5 Calculating Net Forces and Accelerations . . . . . . . . . . . . . . .354.6 Some Simple Examples . . . . . . . . . . . . . . . . . . . . . . . . .36
5 Curved Trajectories in a Plane 405.1 Plane Polar Coordinates . . . . . . . . . . . . . . . . . . . . . . . . .405.2 Angular Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.3 Uniform Angular Motion . . . . . . . . . . . . . . . . . . . . . . . . 415.4 Angular Motion with Varying Angular Velocity . . . . . . . . . . . . 44
5.4.1 Uniform Angular Acceleration . . . . . . . . . . . . . . . . . 445.4.2 Circular Motion . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.5 Motion Along a General Plane Curve . . . . . . . . . . . . . . . . .46
6 Applications of Newton’s Laws 486.1 Relative Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.2 Center of Mass and Systems of Interacting Particles . . . . . . . . . .486.3 Normal and Frictional Forces . . . . . . . . . . . . . . . . . . . . . .496.4 Elasticity and Hooke’s Law . . . . . . . . . . . . . . . . . . . . . . .506.5 Uniform Circular Motion . . . . . . . . . . . . . . . . . . . . . . . . 516.6 Gravitational Force . . . . . . . . . . . . . . . . . . . . . . . . . . .51
7 Momentum 537.1 Linear Momentum . . . . . . . . . . . . . . . . . . . . . . . . . . .537.2 Impulse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 537.3 Conservation of Linear Momentum . . . . . . . . . . . . . . . . . . .54
8 Introduction to Energy Concepts 558.1 Work and Kinetic Energy . . . . . . . . . . . . . . . . . . . . . . . .55
8.1.1 An Example . . . . . . . . . . . . . . . . . . . . . . . . . . 568.2 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
9 Potential Energy and Energy Conservation 589.1 Potential Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . .589.2 Conservation of Mechanical Energy . . . . . . . . . . . . . . . . . .60
10 Torque and Equilibrium 6110.1 Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6110.2 Torque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6110.3 Equilibrium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62

4 CONTENTS
11 Rigid Body Motion 6311.1 Rotational Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
11.1.1 Radius of Gyration . . . . . . . . . . . . . . . . . . . . . . .6311.1.2 Theorems on Moments of Inertia . . . . . . . . . . . . . . . .64
11.2 Angular Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . .6411.3 Kinetic Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
11.3.1 Instantaneous Rotational Power . . . . . . . . . . . . . . . .65
12 Angular Momentum 6612.1 Angular Momentum . . . . . . . . . . . . . . . . . . . . . . . . . . .6612.2 Conservation of Angular Momentum . . . . . . . . . . . . . . . . . .67
13 Harmonic Motion 6813.1 Simple Harmonic Motion . . . . . . . . . . . . . . . . . . . . . . . .6813.2 Damped Harmonic Motion . . . . . . . . . . . . . . . . . . . . . . .6913.3 Simple Pendulum . . . . . . . . . . . . . . . . . . . . . . . . . . . .69

List of Figures
1.1 Graphical representations, in two- and three-dimensions, of vectors~Aand ~B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Graphically adding~C and ~D results in~E. . . . . . . . . . . . . . . . 101.3 Graphically subtracting~D from ~C results in~E. . . . . . . . . . . . . 111.4 a) ~A · ~B =| ~B | (| ~A | cos θ); b) ~A · ~B =| ~A | (| ~B | cos θ). . . . . . . 151.5 A right-hand rule defining the direction of~A× ~B. . . . . . . . . . . . 151.6 a)| ~A× ~B |= A⊥ | ~B |; b) | ~A× ~B |=| ~A | B⊥. . . . . . . . . . . . 16
2.1 Position numbers for rectilinear motion. . . . . . . . . . . . . . . . . 172.2 Instants of timet represented on a number line. . . . . . . . . . . . .182.3 A sequence of positionss occupied at successive instants of timet. . . 192.4 Velocity versus clock time for uniformly accelerated, rectilinear motion.232.5 Stone’s trajectory. Path overlaps, but is offset here for clarity. . . . . .252.6 a vs. t, v vs. t, ands vs. t plots. . . . . . . . . . . . . . . . . . . . . 27
3.1 Parabolic trajectory of a uniformly accelerated particle moving in a plane.303.2 Projectile at0 aimed at objectA, which falls simultaneously with launch.31
4.1 a) Lifted, a block accelerates vertically. b) Free body diagram. c) Vec-tor diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 a) Box resting on the floor. b) Free body diagram. c) Vector diagram. .384.3 a) Frictionless disk accelerated along an inclined plane. b) Free body
diagram. c) Vector diagram. . . . . . . . . . . . . . . . . . . . . . .38
5.1 A circular trajectory in a) Cartesian and b) plane polar coordinates. . .405.2 A particle in uniform circular motion in a) Cartesian and b) plane polar
coordinates. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .425.3 General motion in a plane with instantaneous curvature of radius~ρ
around an axis through c. . . . . . . . . . . . . . . . . . . . . . . . .46
5

List of Tables
5.1 Transformation rules between Cartesian and Plane Polar Coordinates.415.2 Kinematic equations for uniformly accelerated rectilinear and angular
motion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6

Chapter 1
Background Material
1.1 Introduction
This is a course on Classical Mechanics, the science of motion. In Greek philosophy,the concept of motion embraced virtually everything involving change: birth, growth,decay, displacement of objects, alterations in quality. Of these, displacement of objects,like the falling of a stone, the flight of an arrow, the sailing of a ship, came to be denotedas “local” motion. The conceptual revolution which climaxed at the turn of the 17thcentury, and which forms the basis of our contemporary science of mechanics, wascharacterized in part by the stripping away of much of the metaphorical or allegoricalconnotation that had been attached to motion. Once attention became focused on thedescription and understanding of local motion, the modern concept emerged on a timescale that was, comparatively speaking, extremely short.
1.2 Concepts and Definitions: A Vocabulary
To be useful to science, an object of investigation must be denoted unambiguously,its identification clear and universally accepted, and its characteristics quantifiable ei-ther by direct measurement or indirectly via calculation of measurable quantities. Itmust be possible to assign numerical values to characteristics. But measurement is acomparison against a standardunit , and so consists ofboth a number and a unit ofmeasure.
The definition of a physics construct, orconcept, requires, then, a procedure formeasuring it, which results in a number and a unit of measure. In principle, it is alsoproper to include a figure ofuncertainty for each measurement or calculation usingdata. Since every measurement is to some extent uncertain, there is no such thing asan “exact” result. The exactitude of modern mathematical sciences lies in providinghonest estimates of the uncertainties associated with results.
It is a universal convention in scientific work to report, in any numerical result, allfigures up to, and including, the first uncertain one. This automatically tells the reader
7

8 CHAPTER 1. BACKGROUND MATERIAL
where the uncertainty begins. Care, therefore must be taken to report results only toknown significance.
Another way to say all of this is that a name for something in physics is shorthandfor a set of operations. We’ll see shortly what this involves when we define the most ba-sic of all physics concepts, position, instant, and mass, as well as such derived conceptsas displacement, interval, velocity, acceleration, momentum, energy, and force.
1.3 Units, Dimensions, and Physical Entities
The framework of mechanics is formed with just three independent, basic concepts:length (denotedL), time (denotedT ), andmassor mass number(denotedM ). Allother mechanical concepts, such as velocity, acceleration, force, momentum, and en-ergy, are derived from relationships between these three entities. Discussed abstractlyas length, time, and mass number, these concepts are referred to formally asdimen-sions.
1.3.1 Units
Physics is a quantitative, empirical science. Its language is mathematics, and it is solelyconcerned with investigable and testable occurrences. Measurements, and the equa-tions that describe, predict, or explain them, are quantitative in nature: they result innumbers. Mathematical equations describing real physical events must have the samedimensional quantities on each side of the equal sign. In general, it makes no sense toadd entities ofdifferentdimensions (L + M , for example, is absurd), but products ofdifferent dimensions can form interesting derived entities like velocity([~v] = LT−1),force([~F ] = MLT−2), energy([E] = ML2T−2), and so forth. Notice that referenceto thedimensionof a physical entity is indicated by enclosing the entity in brackets,[].
Furthermore, the numbers themselves depend on the choice of measuring tools,which are scaled according to an arbitrary choice ofunits. There are several standardand widely used systems of units. Typically, introductory physics courses in the UnitedStates use the International System of Units (SI) or mks (meter, kilogram, second).
In this class, we will rarely deal with numbers. Not only is the choice of measure-ment convention arbitrary and fundamentally unimportant, but learning to interpretmeasurement results correctly–in terms of uncertainties and resolutions, often sub-sumed under the heading “significant figures”–takes up more time than we can affordand, in the meantime, leads to more confusion and silly errors in student work thanalmost anything else. Besides, this subject presumably is dealt with in detail in thelaboratory. With problems enough understanding the material conceptually and math-ematically, we’ll stick to symbolic representations of physical quantities and ignoreunits.

1.4. DIMENSIONAL ANALYSIS 9
1.4 Dimensional Analysis
Nevertheless, each term of a mathematical expression in mechanics represents a phys-ical entity that can be understood in terms of the three basic entities. Again, the termson each side of an equation’s equal sign must be the same product of these fundamentaldimensions ofL, T , andM . This is a minimal (necessary, but not sufficient) check thatthe equation is reasonable, and one should get in the habit from the start of checkingthat this is the case.
1.5 Scalars and Vectors
A quantity that has magnitude but no direction, like time, mass, and energy, is referredto as ascalar. In these notes, such a quantity will be denoted in italics:t, m, E,for example. A quantity that has a direction as well as a magnitude, such as velocity,acceleration, or force, is usually referred to as avector.1 A vector is denoted in thesenotes as a symbol with a small arrow above:~v, ~a, ~F , for example.
To be specified, a vector requires as many numbers, known ascomponents, asthere are dimensions, while a scalar always requires only one number.
1.6 Vectors: Graphical Representation
Any vector can be represented by a straight line. The line’s length represents the vec-tor’s magnitude, and the angles it makes with respect to the axes of some referenceframe represents the vector’sdirection [see Figure1.1].
(x , y )1 1
2 2(x , y )
z
(x, y, z)
x x
y
θ
φθ y
a) b)
A
A
x
y(0, 0, 0)
B
B
Bz
y
x
BA
Figure 1.1: Graphical representations, in two- and three-dimensions, of vectors~A and~B.
In Figure1.1-a), the magnitude and direction of vector~A are indicated by the di-rected line from(x1, y1) to (x2, y2). In Figure1.1-b), the magnitude and direction ofvector ~B are indicated by the directed line from(0, 0, 0) to (x, y, z).
1Note that some quantities, like rotations, have both direction and magnitude but arenotvectors.

10 CHAPTER 1. BACKGROUND MATERIAL
1.6.1 Graphical Addition
To add two vectors graphically (assuming they represent entities of the same dimen-sionality—otherwise, they can’t be added), place the tail of the second vector on thehead of the first and draw a line from the tail of the first to the head of the second [seeFigure1.2]. This new line represents the magnitude and direction of thevector sum:~E = ~C + ~D.
C
D
E = C + D
y
x
α
D
D
Cy
y
xCx
Figure 1.2: Graphically adding~C and ~D results in~E.
1.6.2 Graphical Subtraction
Graphically subtracting two vectors involves reversing the direction of the second vec-tor and then adding as described above [see Figure1.3].
Note that the magnitude and direction of a line define the vector completely; theplacement in a reference frame, or, equivalently, the choice of coordinate system, isarbitrary. So, in these examples,~C is the same vector in Figures1.3 and 1.2 eventhough its position with reference to the axes is changed.
1.7 Vectors: Component Representation
In Figure1.1-a), theprojection of ~A onto thex-axis is labeledAx, and the projectionof ~A onto they-axis is labeledAy. Ax andAy are known as thecomponentsof ~A:~A = (Ax, Ay). The magnitude, then, of~A is
| ~A |=√
A2x + A2
y (1.1)
and its direction is:
tan θ =Ay
Ax. (1.2)

1.7. VECTORS: COMPONENT REPRESENTATION 11
y
x
E = C − D
−D
y−D
x
Cy
Cx
C
−D
Figure 1.3: Graphically subtracting~D from ~C results in~E.
Similarly, from Figure1.1-b), ~B = (Bx, By, Bz), so its magnitude and directionare:
| ~B | =√
B2x + B2
y + B2z (1.3)
cos θ =Bz
| ~B |; tanφ =
By
Bx. (1.4)
1.7.1 Computing Vector Components
From a vector’s magnitude and direction, one uses trigonometry to compute its com-ponents:
Ax =| ~A | cos θ; Ay =| ~A | sin θ (1.5)
Bx =| ~B | sin θ cos φ; By =| ~B | sin θ sinφ; Bz =| ~B | cos θ. (1.6)
1.7.2 Vector Addition with Components
Figure1.2, again, shows~C + ~D = ~E. ~E is the vector sum of~C and ~D and is re-ferred to as theresultant. Being a vector,~E has components,~E = (Ex, Ey) =
(Cx + Dx, Cy + Dy), and its magnitude and direction are| ~E |=√
E2x + E2
y =√(Cx + Dx)2 + (Cy + Dy)2, andtanα = Ey
Ex= Cy+Dy
Cx+Dx, respectively.
Vector addition in 3-dimensions similarly requires the sums of the three sets ofcomponents.

12 CHAPTER 1. BACKGROUND MATERIAL
1.8 Vectors: Unit Vectors
Any vector ~A may be written as
~A =| ~A |~A
| ~A |=| ~A | e (1.7)
where| ~A | is the magnitude of~A ande is aunit vector in the direction of~A. A unitvector is dimensionless and it has, by definition, magnitude of 1, hence its name. Whenwritten in the form of Equation1.7, the magnitude of the vector~A is given by| ~A | andits direction by that ofe.
1.8.1 Unit Vectors Along Axes
It is most common to introduce unit vectors along the axes of a reference frame. Forthe 3-dimensional reference frame,x, y, z, the corresponding unit vectors are typicallydenotedı, , k. And, since every vector is the resultant of its components,
~B = (Bx, By, Bz) = Bx ı + By + Bz k. (1.8)
If the vector of Figure1.1-b) were to represent aposition, about which we willspeak in the next chapter, then it represents a special case of vector known as ara-dius vector ~r which is a directed line segment from the originO(0, 0, 0) to a pointP (x, y, z). We then write
~r = xı + y + zk (1.9)
| ~r | =√
x2 + y2 + z2 (1.10)
cos θ =z
| ~r |; tanφ =
y
x(1.11)
For motion in 1-dimension, we use the symbols for position; in 2- or 3-dimensions,we use~r.
1.9 Vectors: Multiplication
In this course, we employ three types of multiplication with vectors.
1.9.1 Multiplication of a Vector by a Scalar
Given a scalarλ, the quantityλ ~A is a vector with a magnitude|λ| | ~A | (the absolutevalue ofλ times the magnitude of~A), and a direction the same as~A if λ > 0 or thereverse of~A if λ < 0. Of course, ifλ = 0, theλ ~A = ~0, thenull vector, a vector withno magnitude or direction.

1.9. VECTORS: MULTIPLICATION 13
1.9.2 Scalar or Dot Product of Two Vectors
Given two vectors,~A and ~B, whose directions differ by an angleθ, theirdot product,written ~A · ~B results in a scalar quantity defined
~A · ~B ≡| ~A || ~B | cos θ, (1.12)
where, again,θ is the anglebetween~A and ~B, theincludedangle. Note, that the scalarresult is maximally positive when~A and ~B are parallel, maximally negative when theyare anti-parallel, and zero when they are perpendicular. Note also that the dot productis commutative:~A · ~B = ~B · ~A.
Dot Product of Rectangular Unit Vectors
Becauseı, , andk are mutually perpendicular and of magnitude 1, dot products be-tween and among them are:
ı · ı = · = k · k = 1 (1.13)
ı · = · k = k · ı = 0 (1.14)
Dot Product in Component Form
Consider 2-dimensional vectors~A = Ax ı + Ay and ~B = Bx ı + By . Then
~A · ~B = (Ax ı + Ay ) · (Bx ı + By ).
Assuming the distributive law holds,
~A · ~B = Ax ı ·Bx ı + Ax ı ·By + Ay ·Bx ı + Ay ·By
= AxBx(ı · ı) + AxBy (ı · ) + AyBx( · ı) + AyBy( · )= AxBx + AyBy,
where Equations1.13and1.14have been used.Recall, from Equation1.2, that the directional angle of a vector (say, here,~A) is
given by tan θA = Ay/Ax. But tan θA = sin θA/ cos θA, so if we divide top andbottom of the ratioAy/Ax by | ~A |, we get
tan θA =sin θA
cos θA=
Ay/ | ~A |Ax/ | ~A |
.
Thus,sin θA = Ay/ | ~A | andcos θA = Ax/ | ~A |. And similarly for ~B. Then,
~A · ~B = AxBx + AyBy

14 CHAPTER 1. BACKGROUND MATERIAL
= | ~A || ~B |
(Ax
| ~A |Bx
| ~B |+
Ay
| ~A |By
| ~B |
)= | ~A || ~B | (cos θA cos θB + sin θA sin θB)
= | ~A || ~B | cos (θA − θB).
Now, θA − θB is the magnitude of the angle between~A and ~B. We’ll call it θ.Hence, we arrive at the definition of the dot product:
~A · ~B = AxBx + AyBy
= | ~A || ~B | cos θ,
and we have two equivalent ways of writing the dot product.This notion generalizes to more than two dimensions. In 3-dimensions, we have
~A · ~B = AxBx + AyBy + AzBz
= | ~A || ~B | cos β,
whereβ is the angle between~A and ~B in 3-dimensions.
A Geometric Interpretation of the Dot Product
The dot product may be interpreted as the product of the magnitude of one vector withtheprojection of a second vector onto the first [see Figure1.4]. To find the projectionof one vector onto another, place the vectors tail-to-tail and drop a perpendicular fromthe head of one to the body of the other, forming a right triangle. Ifθ > π
2 , theprojection is negative. Trigonometry gives that [see Figure1.4-a)] the projection of~A onto ~B is | ~A | cos θ, and that [see Figure1.4-b)] the projection of~B onto ~A is| ~B | cos θ.
1.9.3 Vector or Cross Product of Two Vectors
Given two vectors,~A and~B, whose directions differ by an angleθ, theircross product,written ~A× ~B, results in a vector quantity with magnitude
| ~A× ~B |≡| ~A || ~B | sin θ, (1.15)
where, again,θ is the anglebetween~A and ~B, the includedangle. Note, that thismagnitude is a maximum when~A and ~B are perpendicular, and zero when they areparallel or anti-parallel. The direction of this product is defined by convention to beperpendicular to both~A and ~B in the sense of a so-called right-hand rule: beginningwith the fingers of your right hand pointing along the direction of~A, curl your fingerstoward ~B and extend your thumb; the thumb points in the direction of the cross product[see Figure1.5].
Note that as a result of this direction convention, the cross product is anti-commuta-tive: ~A× ~B = −( ~B × ~A).

1.9. VECTORS: MULTIPLICATION 15
B
θ θ
B
θ
θA Aa) b)
cos
cos|B|
|A|
Figure 1.4: a)~A · ~B =| ~B | (| ~A | cos θ); b) ~A · ~B =| ~A | (| ~B | cos θ).
B
A
A Bx
θ
Figure 1.5: A right-hand rule defining the direction of~A× ~B.
Cross Product of Rectangular Unit Vectors
Becauseı, , and k are mutually perpendicular and of magnitude 1, cross productsbetween and among them are:
ı× ı = × = k × k = ~0 (1.16)
ı× = k; × k = ı; k × ı = (1.17)
× ı = −k; k × = −ı; ı× k = − (1.18)
Cross Product in Component Form
Consider 3-dimensional vectors~A = Ax ı + Ay + Az k and ~B = Bx ı + By + Bz k.Then
~A× ~B = (Ax ı + Ay + Az k)× (Bx ı + By + Bz k).
Assuming the distributive law holds,

16 CHAPTER 1. BACKGROUND MATERIAL
~A× ~B = Ax ı×Bx ı + Ax ı×By + Ax ı×Bz k +
Ay ×Bx ı + Ay ×By + Ay ×Bz k +
Az k ×Bx ı + Az k ×By + Az k ×Bz k
= AxBx(ı× ı) + AxBy (ı× ) + AxBz (ı× k) +
AyBx(× ı) + AyBy(× ) + AyBz(× k) +
AzBx(k × ı) + AzBy(k × ) + AzBz(k × k)
= AxByk + AxBz(−) + AyBx(−k) + AyBz ı + AzBx + AzBy(−ı)
= (AyBz −AzBy )ı + (AzBx −AxBz) + (AxBy −AyBx)k
where Equations1.16, 1.17and1.18have been used. Thus, if~C = (Cx, Cy, Cz) =~A× ~B, thenCx = AyBz −AzBy, Cy = AzBx −AxBz, andCz = AxBy −AyBx
An equivalent way to express~A × ~B is as a determinant expanded with respect toto the first row: ∣∣∣∣∣∣
ı kAx Ay Az
Bx By Bz
∣∣∣∣∣∣A Geometric Interpretation of the Cross Product
The cross product of two vectors may be thought of as the product of the magnitude ofone vector and the perpendicular component of the other:| ~A | times the perpendicularcomponent of| ~B |, or, equivalently,| ~B | times the perpendicular component of| ~A |[see Figure1.6], which we may write as
| ~A× ~B |= A⊥ | ~B |=| ~A | B⊥.
B
θ θ
B
A Aa) b)
θ θsin|B|sin|A|
Figure 1.6: a)| ~A× ~B |= A⊥ | ~B |; b) | ~A× ~B |=| ~A | B⊥.

Chapter 2
Rectilinear Motion
2.1 Position and Displacement
To create a numerical description of an object’sposition along a straight line, we set upa series of numerical markers [see Figure2.1]. Denoting anarbitrarily chosen“origin”point by 0, we mark other points +1, +2, -1, -2, etc., laying off a conveniently orientedcoordinate scale (number line). The direction we call positive (or negative) is up tous. The size of the spacing between integer numbers along the line being arbitrary, aswell, we are free to adopt any unit of length we wish, although, for clarity and ease ofcommunication, a national or international standard is probably a good choice.
−3 −2 −1 0 +1 +2 +3 +4 +5s
directionpositivedirection
negative
Figure 2.1: Position numbers for rectilinear motion.
Such areference line or coordinate axis is an example of areference frameor frame of reference. To describe positions in two-(three-)dimensional space, weerect two (three) such axes, usually perpendicular to each other, to obtain a two-(three-)dimensional reference frame.
In 1-dimension, we use the symbols to denote any individual position, and symbolswith subscripts (s0, s1, s2, etc.) to denote particular positions we wish to distinguishfrom each other. These symbols represent onlypositions relative to an arbitrarilychosen origin, not distances traversed by the body.
Let us denote a first position bys1 and a second position bys2. The numbers2−s1
gives us information about what we might callchange of positionor displacement.
17

18 CHAPTER 2. RECTILINEAR MOTION
We will use the symbol∆s as a shorthand for the numbers2 − s1. That is,
∆s ≡ s2 − s1, (2.1)
where∆s, again, is calleddisplacementor change of position.∆s has the following algebraic properties: it may be positive, negative, or zero
depending on the numerical values and algebraic signs ofs2 ands1. The resulting signindicates the direction of the displacement (in terms an arbitrarily chosen orientation)as long as the positionss1 and s2 are time-ordered (that is, the object occupieds1
before it occupieds2).
2.2 Instant and Interval of Time
Instants are assigned numbers in much the same way as position. In fact, the formerdepends on the latter being well-established. Fortunately, though, there are fewer con-ventional time units than space units. Instants are typically measured by observing theposition of some object which, in effect, counts a regular variation or oscillation. Theposition of the hand of a clock, for example, counts oscillations of a balance wheelor a pendulum or a vibrating quartz crystal. By associating such positions with clockreadings orinstants of time, a sequence of instants can be matched to a number line[see Figure2.2]. We use the symbolst to indicate a general instant of time, andt0, t1,t2, etc., for specific clock readings.
−3 −2 −1 0 +1 +2 +3 +4 +5t
clock hand positionsbefore position 0
clock hand positionsafter position 0
Figure 2.2: Instants of timet represented on a number line.
We bring an intuitive conception of the natural “flow” of time to this representationand adopt the convention of labeling succeeding instants with increasingly positivenumbers. In other words, time progresses only in the positive “direction.” The instantwe denotet = 0, just like the position we denotes = 0, is arbitrary. The negativenumbers here, though, contain no implication whatsoever of time running backward,or negative time intervals. Negativet simply refers to an instant which precedes thearbitrarily (though conveniently) chosent = 0.
To calculate aninterval of time , we must take a difference:
∆t ≡ t2 − t1, (2.2)
wheret2 is always taken as the instantlater in the sequencethant1. Thus, we definetime interval∆t as an intrinsically positive quantity.

2.3. S − T HISTORIES 19
2.3 s− t Histories
Say we observe an object is located at some positions1 when the hand of the clockis at “position” or instantt1. Thus we observe the simultaneous occurrence of a pairof events–position of the object and position of the hand of the clock. Similarly, weobserve the coincidence of a second pair of events which we associate with the symbolst2 and s2. Now, having the pairs of numbers orcoordinates (t1, s1) and (t2, s2).These, and other pairs, can then be plotted on aposition versus instant graphorposition versus clock reading graphto give ans − t history of the object.
We set up a pair of coordinate axes [see Figure2.3], and, instead of labeling themy andx as in elementary algebra, we label thems andt. In this representation, each“event” in therectilinear (or straight-line) motion of a particle (that is, its positions occupied at instantt) becomes associated with a point in thes − t plane, defined bythe two coordinate lines (axes). An accumulation of data–corresponding values oftands–can then be “plotted” or “graphed” to give a visual picture of thehistory of anobserved motion; or, conversely, a line or curve drawn on ans − t diagram can beinterpreted as the history of a hypothetical motion. In coordinate representations of thiskind, the horizontal coordinate, in this caset, is called theabscissa, and the vertical iscalled theordinate.
Figure 2.3: A sequence of positionss occupied at successive instants of timet.
We may also calculate the displacement∆s and the corresponding time interval∆tfrom pairs of such pairs.

20 CHAPTER 2. RECTILINEAR MOTION
2.4 Velocity
2.4.1 Average Velocity
We signify the ratio of displacement to its corresponding time interval theaveragevelocity:
v ≡ ∆s
∆t. (2.3)
Equation2.3can be rearranged:∆s = v∆t or s2− s1 = v(t2− t1). If we indicateinitial values with the subscripti (which, be aware, doesnotnecessarily imply thatti =0) and any final values without subscripts, the last equation becomess−si = v(t− ti),or
s = si + v(t− ti). (2.4)
That is, the positions at some instantt is numerically equal to the position at the initialinstantsi plus the average velocityv times the time interval since the initial instantt− ti = ∆t.
Note that the average velocityv has algebraic characteristics that derive from thoseof ∆s and∆t. The algebraic sign of∆s, recall, indicates the direction (relative to thechosen reference frame) of displacement.∆t is positive definite. Thus, the sign of theaverage velocity indicates its direction. The dimension of velocity isLT−1.
2.4.2 Instantaneous Rectilinear Velocity
In more than one dimension, the vectorial characteristics of displacement become evi-dent. The direction therefore is denoted with appropriate angles or unit vectors ratherthan simply an algebraic sign. In 3-dimensions, we write:
~r = (x, y, z) = xi + yj + zk. (2.5)
If we consider two positions relative to our chosen origin,~r1 = (x1, y1, z1) and~r2 = (x2, y2, z2), then the vector displacement in 3-dimensions becomes
∆~r = ~r2 − ~r1 = (x2 − x1, y2 − y1, z2 − z1) = (∆x, ∆y, ∆z). (2.6)
∆t of course is a scalar, and so, therefore, is1∆t . Then the ratio∆~r
∆t is an exampleof multiplication of a vector,∆~r, by a scalar, 1
∆t . We may then take the limit as∆tbecomes infinitesimally small to defineinstantaneous rectilinear velocity:
~v ≡ lim∆t→0
∆~r
∆t≡ d~r
dt≡ ~r, (2.7)
where a single dot over a variable indicates differentiation with respect to time.In terms of rectangular unit vectors,

2.5. ACCELERATION 21
~v = vxi + vy j + vz k
=dx
dti +
dy
dtj +
dz
dtk (2.8)
≡ ~r = xi + yj + zk.
Notice that the instantaneous velocity is thederivative of the position versus timecurve. That is, if one plots position as a function of time, the tangent of the resultingcurve at a given instant is the instantaneous rectilinear velocity at that instant, both itsmagnitude and the direction.
2.5 Acceleration
An object has instantaneous velocity~v1 at t1, and instantaneous velocity~v2 at t2, andso forth. Such pairs(t1, v1), (t2, v2),. . . , may be plotted to graphically present avelocity versus time history.
If ~vi = ~vj regardless of the instants at which the velocity is measured, then wesay that the motion isconstantor uniform . The velocity versus time graph will be ahorizontal straight line. The graph of position versus time in this case will be a straightline (since the tangent, or slope, of the resulting curve is constant). The straight linewill be horizontal (parallel to the clock time axis) if this constant velocity is~0 (theposition doesn’t change with time); it will have positive pitch if the velocity is in thepositive direction and negative pitch if the velocity is in the negative direction.
In general, though, thechange in velocity, ∆~v ≡ ~v2−~v1, will not be zero. That is,for general motion, the magnitude or the direction of the velocity–or both–may change.Velocity change involves vector subtraction and results in a zero vector only if the twovectors are identical.
2.5.1 Instantaneous Rectilinear Acceleration
The rate at which the velocity changes, during a finite interval of time, is called theinstantaneous rectilinear acceleration:
~a ≡ lim∆t→0
∆~v
∆t≡ d~v
dt =dvx
dti +
dvy
dtj +
dvz
dtk
≡ ~v = vxi + vy j + vz k
= d2~rdt2 =
d2x
dt2i +
d2y
dt2j +
d2z
dt2k (2.9)
≡ ~r = xi + yj + zk = axi + ay j + az k,
where double dots over a variable indicate a second derivative with respect to time.Notice that the instantaneous acceleration is the derivative of the velocity versus timecurve. That is, if one plots velocity as a function of time, the tangent of the resulting

22 CHAPTER 2. RECTILINEAR MOTION
curve at a particular instant is the instantaneous rectilinear acceleration at that instant,giving both the magnitude and the direction.
2.5.2 Uniformly Accelerated Rectilinear Motion
If ~a remains constant in both magnitude and direction, the motion is calleduniformlyaccelerated rectilinear motion. The plot of velocity versus time is a straight line, theslope of which gives the magnitude and direction of the constant acceleration. Theseremain the same over all time intervals,∆t, and not just for an infinitesimal intervaldt. In such a case, it is most convenient to set an axis of your reference frame (orcoordinate system) along the line of the acceleration. The positive direction may pointeither parallel or anti-parallel to~a. Having done so, the vector arithmetic reduces toworking with signed numbers, where the sign indicates the direction: positive meansparallel to the axis and negative means anti-parallel. We can drop the vector notation,but we must then be careful with (especially when interpreting) the sign. So,~a becomes±a,~v becomes±v, and~r becomes±s, where the sign depends on the direction relativeto the chosen positive direction of the axis in the case ofa andv and the location relativeto the arbitrarily chosen origin in the case ofs. Furthermore, with~a = a a constant,then
a =∆v‖
∆t, (2.10)
wherev‖ is the projection of~v onto the axis along the direction of the acceleration.For 1-dimensional motion,v‖ = v, which is the signed velocity we can use in place ofvector notation (for this special case). Thus, for1-dimensional, uniformly acceleratedmotion, we havea = ∆v
∆t . Let us, as previously, identify initial variables with thesubscripti and the final variables without a subscript. So, again for1-dimensional,uniformly accelerated motion only,
v = vi + a(t− ti), (2.11)
for the special caseof 1-dimensional, uniformly accelerated motion only. This, you’llrecall, is similar in form to Equation2.4, s = si + v(t− ti).
Now, consider a velocity versus clock time plot for 1-dimensional, uniformly accel-erated motion [see Figure2.4]. In particular, consider thearea under the curve(here,the “curve” is a straight line, because the acceleration is assumed constant) betweent = ti, whenv = vi, and clock readingt, when the velocity isv. The shape underconsideration is a right trapezoid composed of a rectangle of base∆t = t − ti andheightvi, and a triangle of base∆t = t− ti and height∆v = v − vi.
The area, then, isvi(t − ti) + 12 (v − vi)(t − ti) = 1
2 (v + vi)(t − ti). Noticethat the area is a product of a sum of velocities (which results in a quantity of thesame dimension as velocity,LT−1, and a time interval, of dimensionT . The producttherefore has dimensionL.
In Equation2.4, we also have a product of a velocity and a time interval, the resultof which is a displacement. We might surmise that1
2 (v + vi)(t− ti) is a displacement,

2.5. ACCELERATION 23
v
t0 t
v
iv
it
Figure 2.4: Velocity versus clock time for uniformly accelerated, rectilinear motion.
under the condition that the motion is linear and uniformly accelerated. If our guess iscorrect, then we have to identify
v =v + vi
2, (2.12)
for uniformly accelerated, rectilinear motion.1 Equation2.4 now, under these restric-tions, takes the forms = si + 1
2 (v + vi)(t − ti). But we know from Equation2.9thatv = vi + a(t − ti). Substituting this expression for the velocity at clock readingt into the revised Equation2.4 (both of which hold only if the motion is uniformlyaccelerated rectilinear motion) we get, after some algebra:
s = si + vi(t− ti) +12a(t− ti)2. (2.13)
Solving Equation2.11for ∆t and substituting into Equation2.13, we arrive at thethird important equation describing uniformly accelerated rectilinear motion:
v2 = v2i + 2a(s− si). (2.14)
So, as a result of the definition of acceleration and by reasoning that, for uniformlyaccelerated rectilinear motion,v = vi+v
2 , we have three equations, each describingsuch motion in terms of three of the four variables of interest: displacement, velocity,acceleration, and time interval. These equations, again, are:
1Be sure to understand that this identification of average velocity with the arithmetic average of initialand final velocities holdsonly in the case of uniformly accelerated, rectilinear motion; it isnot a generalrelationship.

24 CHAPTER 2. RECTILINEAR MOTION
Equation2.11: v = vi + a∆tEquation2.13: s = si + vi∆t + 1
2a(∆t)2
Equation2.14: v2 = v2i + 2a∆s.
Gravitational Acceleration
Because every object falling freely near the surface of the earth accelerates at an almostconstant rate toward the center of the earth, such motion has been used to study therelations just given. To a very good approximation, the three equations hold, justifyingour guess that, for this sort of motion, the average velocity is numerically equal to thearithmetic average of the initial and final velocities. In fact, this relationship can bederived using the integral methods for finding averages:
v ≡ 1∆v
∫ v
vi
v dv
=12
v2 − v2i
v − vi
=v + vi
2.
The near constancy of free fall acceleration, and the importance of gravitationalacceleration to all aspects of terrestrial mechanics, has earned this acceleration its ownsymbol,g, which we will employ frequently.
2.5.3 An Example Problem
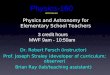
A stone is thrown vertically upward with an initial velocityv0 from the edge of a cliffheighth above the value below. The stone rises and falls along a straight line justbeyond the edge of the cliff [see Figure2.5].
We assume that the motion is uniformly accelerated and rectilinear, so that we canuse the kinematic equations2.11, 2.13, and2.14.
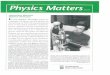
The following [see Figure2.6] are sketches of acceleration versus clock time, ve-locity versus clock time, and position versus clock time. In the plots, we have takenti = 0 andsi = 0. Notice that, having assigned upward the positive direction, thevelocity always decreases with time. The dashed lines highlight key instants, but haveno physical significance.
1. How high does the stone rise?
At the top of its trajectory, the stone’s velocity is instantaneously0. This is not to say that it stops, as it’s acceleration remains uni-form: from one instant to the next the stone’s velocity is chang-ing. You might think of the maximum height as a transition pointbetween positive and negative velocity. Then, using Equation2.14v2 = v2
i + 2a(s− si), we have

2.5. ACCELERATION 25
s = 0
Trajectory
0v
DirectionPositive
0
s = −h
Figure 2.5: Stone’s trajectory. Path overlaps, but is offset here for clarity.
0 = v20 − 2g(smax − 0)
smax =v20
2g
2. At what instant does it arrive at its highest point?
Using Equation2.11v = vi + a∆t = vi + a(t− ti), we have
0 = v0 − gtmax
tmax =v0
g
3. What is the stone’s velocity when it returns past the edge of the cliff?
Using Equation2.14v2 = v2i + 2a(s− si), we have
v2 = v20 − 2g(0− 0)
v2 = v20
v = ±v0
There are two values for the stone’s velocity at the cliff’s edge:+v0 isthe stone’s initial velocity when it begins its ascension; so,−v0 mustbe its velocity on its return to positions = 0. The stone’s velocityis equal in magnitude but opposite in direction when it returns to theplace it was thrown. You should be able to prove that this relationshipholds for any position above the cliff edge.

26 CHAPTER 2. RECTILINEAR MOTION
4. At what instant does the stone strike the ground at the foot of the cliff?
Asked about a relationship between position and time, knowing theconstant acceleration and the initial velocity and position as well asthe final positions = −h, we use Equation2.13s = si + vi∆t +12a(∆t)2:
s = −h = 0 + v0(t− 0)− 12g(t− 0)2
−h = v0t−12gt2
This is a quadratic equation which we must solve fort. It willyield two solutions, from which we must decide the correct one.
12gt2 − v0t− h = 0
t =v0 ±
√v20 − 4
(12g)(−h)
2(
12g)
=v0 ±
√v20 + 2gh
g
Now the argument of the square-root is positive definite (all quan-tities are positive and added together) and larger thanv2
0 , so that thesquare-root will be larger thanv0. Therefore, the+-sign will yielda positive clock time while the−-sign yields a negative clock time.Given the statement of the problem, a negative clock time is not phys-ically possible, but for a point of information the negative clock timerepresents the instant the stonewould havepassed−h on the way upto the cliff-top so as to have an upward velocity ofv0 and a position0 at clock timet = 0. In any case, the clock time when the stone hitsthe ground is
t =v0 +
√v20 + 2gh
g,
if the clock time was 0 when the stone was first thrown. At clock time
t >v0+√
v20+2gh
g the stone obviously is lying on the ground.

2.5. ACCELERATION 27
s [L]
v [L T ]
a [L T ]
t [T]
t [T]
t [T]
v0
−2
−1
0 ∆v = v − g t
−h
smax
−g
0 ∆ ∆ 2s = v t − 1/2 g( t)
Figure 2.6:a vs. t, v vs. t, ands vs. t plots.

Chapter 3
Planar Motion with ConstantAcceleration
We noted previously the general representations of position, velocity, and accelerationin three dimensions:
Equation2.5: ~r = xi + yj + zkEquation2.8: ~v = vxi + vy j + vz k = xi + yj + zk
Equation2.9: ~a = axi + ay j + az k = vxi + vy j + vz k = xi + yj + zk.
For motion in a plane, i.e., 2-dimensional motion, these equations reduce to
~r = xi + yj (3.1)
~v = vxi + vy j = xi + yj (3.2)
~a = axi + ay j = vxi + vy j = xi + yj. (3.3)
If the acceleration is constant, thenax (x) anday (y) arebothconstant.The magnitudes and directions of these vectors are:
| ~r |= (x2 + y2)1/2 tan γ =y
x(3.4)
| ~v |= (x2 + y2)1/2 tanβ =y
x(3.5)
| ~a |= (x2 + y2)1/2 tanα =y
x, (3.6)
whereγ, β, andα are the angles between~r and thex-axis,~v and thex-axis, and~a andthex-axis, respectively.
~r, ~v, and~a are related to one another, in the case of constant acceleration, by rela-tively simple integration with respect to time:
28

29
~v =∫ t
ti
~adt = ~vi + ~a∆t (3.7)
~r =∫ t
ti
~vdt = ~ri + ~vi∆t +12~a(∆t)2, (3.8)
where~vi and~ri are the initial values (the values att = ti) of ~v and~r, respectively, and∆t = t− ti.
Under the condition of constant acceleration, we can add
| ~v |2=| ~vi |2 +2~a ·∆~r. (3.9)
That is, the squared velocity changes as twice the dot product of the acceleration anddisplacement, or, more concretely, as twice the product of the magnitude of the dis-placement and the parallel component of the acceleration.
The components, then, of Equations3.7, 3.8, and3.9 lead for each coordinate torelations exactly analogous to those we’ve seen before in 1-dimensional motion:
x =12(xi + x) y =
12(yi + y) (3.10)
x = xi + x∆t y = yi + y∆t (3.11)
x = xi + xi∆t +12x(∆t)2 y = yi + yi∆t +
12y(∆t)2 (3.12)
x2 = x2i + 2x∆x y2 = y2
i + 2y∆y, (3.13)
where∆x = x− xi and∆y = y− yi are the displacements in thex- andy-directions,respectively.
It is important to understand that to assume uniformity (constancy) of acceleration,in both magnitude and direction, isnotto imply that the motion is necessarily rectilinear(in a straight line). In fact, the general motion in a plane will be parabolic, although thedegenerate case, when one of the initial velocities is and remains zero, is rectilinear.
To see this, first recall that we are free to set up our axis in any orientation wechoose. The choose, for example, thex-axis to be parallel to acceleration. Thus,~a = axi = xi, andy = 0. Then, Equations3.11become:
x = xi + xi∆t +12x(∆t)2 y = yi + yi∆t.
Solving the second of these equations for∆t and substituting the result for∆t in thefirst, we get
x = xi +xi
yi(y − yi) +
x
2y2i
(y − yi)2, or
(y − yi +xiyi
x)2 =
2y2i
x(x− xi +
x2i
2x),

30 CHAPTER 3. PLANAR MOTION WITH CONSTANT ACCELERATION
a = x i..
v
x
i
y
i
i
x
y
yi −
xi
iy.
i.x
x..
−ix2
x..
2
.
Figure 3.1: Parabolic trajectory of a uniformly accelerated particle moving in a plane.
which is the equation of a parabola opening parallel to thex-axis [see Figure3.1].Two particularly interesting numbers describing the flight of a projectile on earth
are the time of flight and its horizontal range. Consider the case in which a projectile islaunched with velocity| ~v |= vi at angleα relative to a horizontal terrain so that it startsat levelyi and returns to levely = yi. We find the time of flight with Equation3.11y = yi + yi∆t + 1
2 y(∆t)2, wherey = vi sinα, andy = −g:
y = yi + vi sinα∆t− 12g(∆t)2
0 = vi sinα∆t− 12g(∆t)2.
This equation has two solutions:∆t = 0, which corresponds to the start of the motionat (xi, yi), and a second value of∆t, which we may denote∆tR, given by
∆tR =2vi sinα
g,
which is called thetime of flight . The horizontal displacement or flightrange R isobtained by substituting the time of flight∆tR for ∆t in the horizontal version ofEquation3.11x = xi + xi∆t + 1
2 x(∆t)2, where, now,xi = vi cos α andx = 0.
R = ∆x = vi cos α2vi sinα
g
=v2
i sin 2α
g.
This equation informs us how the range of a projectile over horizontal terrain mustdepend on the magnitude and elevation of its initial velocity. If the initial velocityvi

3.1. AN EXAMPLE PROBLEM 31
of a projectile (often referred to as themuzzle velocity) is increased while keepingαconstant, the range increases. This is not surprising, but it is not quite so obvious thatthe range depends on thesquareof the muzzle velocity and therefore increases, forexample, by a factor of four when the initial velocity is doubled.
If vi is held constant whileα is increased from low values,R increases, as wewould expect. But whenα = π/4 or 45◦, 2α becomesπ/2 and the sine functionattains its largest value of+1. Asα increases beyond this point,sin 2α decreases. Thismeans that the horizontal rangeR must have a maximum value (for a fixed muzzlevelocity) at an initial velocity elevation of45◦.
3.1 An Example Problem
The profound implication of the Equations3.9-3.12is that the coordinates are indepen-dent of one another: what happens in thex-direction has no effect on what happens inthey-direction, and vice-versa. Thus, a ball tossed straight up air inside of a jet will fallstraight back down to to the tosser, not sail to the back of the cabin. So too, a projectileaimed at an object suspended at the same horizontal level will strike the object if thelatter is dropped at the same instant the projectile is launched.
What can we expect to happen if the second example is altered slightly: say theprojectile aims directly at an object not at the same horizontal level? Again, the launchof the projectile and the dropping of the object are simultaneous.
Suppose that the projectile is launched from the origin(0, 0) with initial velocityvi = v0 at an angleα with the horizontal, and the object begins to fall from rest fromposition (L, h) [see Figure3.2], all at instantti = 0. In this case, motion in thex-direction is uniform while motion in they direction accelerates at−g. For the theprojectile, then,xp,i = 0, yp,i = 0, xp,i = v0 cos α, yp,i = v0 sinα, xp = 0, andyp = −g. For the object,xo,i = L, yo,i = h, xo,i = 0, yo,i = 0, xo = 0, andyo = −g.
L
h = L tan α
B
A
αx
0
y
v 0
Figure 3.2: Projectile at0 aimed at objectA, which falls simultaneously with launch.
The equations for the positions the projectile and the object are adapted from Equa-

32 CHAPTER 3. PLANAR MOTION WITH CONSTANT ACCELERATION
tions3.11,
x = xi + xi∆t +12x(∆t)2 y = yi + yi∆t +
12y(∆t)2 :
xp = v0 cos αt yp = v0 sinαt− 12gt2
xo = L yo = h− 12gt2 = L tanα− 1
2gt2.
The projectile therefore reaches thex-position of the object after a time intervalt = L/v0 cos α. The respectivey-positions then are:
yp = L tanα− g
2v20 cos2 α
L2
yo = L tanα− g
2v20 cos2 α
L2.
Thus,yp = yo; the projectile is at the same place at the same instant as the object andtherefore strikes it. Depending on the magnitude ofv0, the impact might occur whilethe projectile is still rising (v0 large), or below the horizontal at some point such as Bin Figure3.2(v0 small). If the projectile is launched from ground level and the groundproceeds outward horizontally from the origin, thenv0 would have to equal or exceedsome critical valuev0,crit for the projectile to reach the object before it hits the groundshort of the object’sx-location.
yo = 0 at clock readingt =√
2L tanα/g. Again, xp = at clock readingt =L/v0 cos α. The minimum necessary initial velocityv0,crit for the projectile to strikethe object before itself hitting the ground is determined by setting these times equal toone another:
v0,crit =
√gL
sin 2α,
because2 sinα cos α = sin 2α.There is another descriptive interpretation of these results: Motion along a parabolic
trajectory may be thought of as a superposition of a uniform motion at velocityv0 alongstraight line0A in Figure3.2 combined with free fall through various distances fromthis line. We show this interpretation with dotted segments in the figure.

Chapter 4
Introduction to Newton’s Lawsof Motion
4.1 Mass
Objects differ in their resistance to changes in their state of rest or of uniform rectilinearmotion. This property of resistance is given the nameinertia . One way of quantifyinginertia–of giving it a number and a unit–is to assign amass numberm. Inertia has thedimension of massM .
4.2 Newton’s Laws of Motion
First Law: An object continues in its state of rest or of uniform rectilinear motionunless acted upon by a net external force.
The significance of this law has two parts:
• It defines qualitatively the concept offorce, as anything that tends to change thestate of an object’s motion.
• It implicitly defines aninertial coordinate systemas that reference frame inwhich objects unaffected by a net external force will be found to be at rest or inuniform rectilinear motion.
Second Law: An object of mass numberm subject tovarious forces,~F1, ~F2, ~F3,. . . ,accelerates (changes it state of rest or uniform rectilinear motion) according to therelationship
N∑i
~Fi = m~a, (4.1)
33

34 CHAPTER 4. INTRODUCTION TO NEWTON’S LAWS OF MOTION
where∑N
i~Fi = ~Fnet is the vector sum ofall the forces acting on the object, and~a is
the acceleration. If the resultant net force is~0, then Newton’s Second Law states that~a = ~0, implying that the object remains at rest or in uniform rectilinear motion: it’srectilinear velocity remains constant in both magnitude and direction.
Third Law: If one object exerts a force~F1→2 on a second object, then, regardless ofwhat other forces may be acting on either or both of the two objects, the second objectexerts a force~F2→1 on the first object equal in magnitude and opposite in direction tothe force the first exerts on the second:
~F2→1 = −~F1→2. (4.2)
Notice that Newton’s Third Law implies that there is no possibility of a single,isolated force; forces always arise in pairs. Nevertheless, it is essential to realize thatthisdoes notmean that all forces cancel: each force of a pair acts on a different object.Newton’s Second Law sums forces exertedonan object only,not forces exertedby theobject.
4.3 Weight
Inertia, quantified in terms of, for example, a mass number, is a property of an object.The object retains this property quantitatively (the mass number is the same) anywherein space and time as long as the physical properties of the object remain unchanged.
Weight, on the other hand, is the name for the gravitational force exertedon theobject, and so depends on the nature of the gravitational force at the specific locationin space and time the object happens to occupy. Where the gravitational acceleration is~g, the weight~W of an object of mass numberm is:
~W = m~g. (4.3)
4.4 Inertial and Non-inertial Reference Frames
Consider the following: Sitting in a train, you hold a ball up so as to be visible byan observer standing along the tracks. If the train is moving uniformly in a straightline, you will see the ball at rest in your hand and the observer will see it movingat constant velocity. From both points of view, according to Newton’s Second Law,~Fnet = m~a = ~0. If, with the train moving uniformly in a straight line, you dropthe ball, you will see it accelerate uniformly straight down to the floor of the train.An outside observer will see the ball follow a parabolic trajectory, just like projectilemotion: uniform rectilinear motion horizontally and uniformly accelerated rectilinearmotion vertically. Again, both of you will agree as to the form and content of Newton’sSecond Law:Fx net = max = 0 andFy net = may = mg, assuming ”down” to bethe positivey-direction. But, if the train were changing its velocity–speeding up, orslowing down, or changing direction, or some combination of these–then there would

4.5. CALCULATING NET FORCES AND ACCELERATIONS 35
no longer be agreement between you and the observer with regard to Newton’s SecondLaw. If you were holding the ball, then, regardless of the train’s motion, you wouldsee the ball at rest, so~Fnet = m~a = ~0 for you, but the outside observer would seethe ball accelerating along with you and the train, assigning a force, say, from yourhand, to be acting on the ball, changing its motion. If, rather, you were to let theball go as the train’s motion were changing, you’d identify a horizontal component inthe ball’s acceleration–backward if the train happened to be speeding up, forward ifthe training were slowing down, or to the right or left if the train were turning–alongwith the gravitational acceleration. The outside observer, however, would see the sameprojectile path as if the train were moving uniformly. You’d have to assign a horizontalcomponent to the force, but the outside observer would not.
Frames of reference in which all observers measure the same behavior (get the sameform and content for Newton’s Second Law, for example) move at constant velocityrelative to one another and are known asinertial . When observers in two differentframes cannot agree, it means that one or both of the frames are accelerating, and theframes are callednon-inertial . Determined from a frame accelerating at~an, Newton’sSecond Law requires an extra term to describe the motion of an object:
∑~F −m~an = m
d~v′
dt, (4.4)
whered~v′/dt is the acceleration of the object as measured by an observer in the accel-erating frame (notequal to~a measured by an observer in an inertial frame) and
∑ ~F isthe vector sum of all readily identifiable, physical forces acting on the object. The term−m~an is sometimes interpreted as a force, referred to as aninertial force or fictitiousforce.
4.5 Calculating Net Forces and Accelerations
A sound, and therefore strongly recommended, approach to calculating net forces andresultant accelerations follows:
1. Draw a reasonably careful picture of the situation.
2. Consider separately (i.e, isolate) the object whose motion is under investigation.
3. Draw as vectors all forces acting on the object, roughly indicating the magnitudeand direction of each force (that is, create a so-calledfree body diagram). Notethat the forces will be acting at a point for the idealization of objects as points.
4. Determine the resultant net force,~Fnet.
5. Choose a convenient inertial coordinate system, indicating the positive direc-tion(s) explicitly. The earth may be considered inertial for the most part.
6. Apply Newton’s Second Law:~Fnet = m~a, where~a is relative to the coordinatesystem you have chosen.

36 CHAPTER 4. INTRODUCTION TO NEWTON’S LAWS OF MOTION
4.6 Some Simple Examples
Example 1 A block with mass numberm is lifted upward with force~T [see Fig-ure4.1] resulting in a vertical acceleration.
a) b) c)
x
y
T
T
W = mgFnet
W
W
Figure 4.1: a) Lifted, a block accelerates vertically. b) Free body diagram. c) Vectordiagram.
Two forces are acting on the block:~T , which we show in the free body diagram asan arrow placed along the line of the cord attached to the block (whatever is exertingthis force is irrelevant and not shown), and~W , the weight, which is really the resul-tant of a great number of parallel, downward forces that the earth exerts on the smallchunks that we might visualize make up the block, and shown by means of an arrowpassing through some central point where we might think of the block’s inertia as be-ing concentrated. If the block has sizable dimensions and the force~T were appliedat one corner instead of along the center line, the block would tend to rotate as wellas move vertically. In placing~W and ~T along a common line of action, we avoid thecomplication of rotational effects we are not yet prepared to analyze. In this sense, weare treating a finite object as a particle with only translational “degrees of freedom” ofmotion.
What could be the direction and magnitude of the vertical acceleration for differentvalues ofm andT? We introduce thex- andy-axes, as shown in the figure, and applyNewton’s Second Law:
Fx net = max, Fy net = may.
From the free body diagram, we see thatFx net andax are zero, so the horizontaldirection is of no further concern. Taking they-direction as positive upward, we have
~Fy net =| ~T | − | ~W |=| ~T | −m | ~g | .
We illustrate graphically this algebraic result in the figure. Substituting the expressionfor Fy net into the Second Law equation,
| ~T | −m | ~g |= may,

4.6. SOME SIMPLE EXAMPLES 37
and solving for the acceleration,
ay =| ~T | −m | ~g |
m.
Therefore, we find:
1. If | ~T |> m | ~g |, thenay is positive, indicating an upward acceleration. Nat-urally, it does not matter whether| ~T | is applied as a pull from above or as apush from below. To accelerate an object upward, the externally applied upwardforce must belarger than the weight of the object. Increasingm will decreasethe acceleration if~T remains fixed.
2. If | ~T |= m | ~g |, the acceleration is zero. This is the situation in which our pullis equal and opposite to the pull of gravity and the effects cancel. The block maybe motionless (hanging in the air, for example) or moving up or down atuniformvelocity. In either case, the net force and acceleration are zero, and the system issaid to bein (static) equilibrium .
3. If | ~T |< m | ~g |, ay is negative, indicating a downward acceleration. If theupward pull pull is less than the weight, the body accelerates downward.
4. If ~T = 0, ay = − | ~g |, and the body is in a state of free fall.
If the direction of ~T were reversed, and the block, instead of being lifted, werepushed downward, the downward acceleration would then have a magnitude largerthan| ~g |.
Example 2 A box, resting on the floor, is pulled upward with a force insufficientto impart vertical acceleration [see Figure4.2]. It’s not falling, either. But, since weknow gravity doesn’t turn off, we infer that either the upward pull is exactly equal tothe graviational pull or that there is another force perpendicular ornormal to the floor.To account for all possibilities, we introduce a so-callednormal force ~N which yousee included in the figure.
The normal force is a “passive” force which adjusts itself to some value dictated bythe law of motion (Newton’s Second Law). Such forces are always present wheneverobjects are pressed together by external actions. You might think of these as arisingfrom the tendency of deformed surfaces to “spring back” to their original shapes.
We ask how~N adjusts itself in our case. Taking the positive direction upward,
Fy net =| ~T | + | ~N | − | ~W | .
Recall that in this case there is no acceleration, soFy net = may = 0. Therefore,
| ~T | + | ~N | − | ~W |= 0,
and, so,
| ~N |=| ~W | − | ~T |= m | ~g | − | ~T | .

38 CHAPTER 4. INTRODUCTION TO NEWTON’S LAWS OF MOTION
x
y
T
WN
WT
N
F = 0net
a) b) c)
Figure 4.2: a) Box resting on the floor. b) Free body diagram. c) Vector diagram.
1. If | ~T |= 0, then the normal force| ~N |=| ~W |= m | ~g | the weight of the box.
2. If | ~T | is increased, then| ~N | becomes smaller and equals zero when| ~T |=m | ~g |.
3. If | ~T |> m | ~g | and the acceleration remains zero, then~N must be directeddownward, that is, the box must be secured (say, glued or nailed) to the floor.
Example 3 A frictionless disk with mass numberm on a plane inclined at an angleθ from the horizontal is acted upon by a force~P parallel to the plane [see Figure4.3].
a) b) c)
θ
xy
θ
P P
WNW N
Fnet
W = mg
Figure 4.3: a) Frictionless disk accelerated along an inclined plane. b) Free bodydiagram. c) Vector diagram.
The forces in this example are not all collinear. We take them to pass througha single point, treating the extend object as a point particle, and we thereby ignoretipping or rotating effects. As in Example 2, the plane exerts a passive normal force.
For convenience, we set up a reference system so that one axis is parallel to thedirection of the acceleration, and the other axis perpendicular to it. In so doing,~P isalso parallel to an axis and the normal force~N is perpendicular. The weight~W mustbe decomposed into components. Plane geometry tells us that the component of~W

4.6. SOME SIMPLE EXAMPLES 39
parallel to the planeWx = −mg sin θ, and the component perpendicular to the planeWy = −mg cos θ. Then,
Fx net = | ~P | −mg sin θ = max
Fy net = | ~N | −mg cos θ = 0.
Therefore,
ax =| ~P | −mg sin θ
m
| ~N | = mg cos θ.

Chapter 5
Curved Trajectories in a Plane
5.1 Plane Polar Coordinates
Up to this point, we’ve been employing what are calledrectangular or Cartesiancoordinatesystems to define our spaces. We now introduce another sort of coordinatesystem, usingplane polar coordinates, which for some purposes, like curved motionin a plane, is much more convenient.
Plane polar coordinates include measures of the spatial displacement from an ori-gin ~ρ and of the angular displacement~θ from a reference line, typically the horizontal[see Figure5.1]. The dimension of~ρ is, of course, lengthL. The angle is a dimension-less variable (as an argument of a transcendental function must be), nevertheless, it ismeasured in a unit given by the dimensionless ratio of the arc length subtended to theradius of the circle inscribed called theradian; there are2π radians in a circle, sincethe circumference of a circle is given by2πr, wherer is the radius of the circle.
a) b)
x
y
0
ρρ
(x, y)
| θ |
(| ρ |, )| θ |
Figure 5.1: A circular trajectory in a) Cartesian and b) plane polar coordinates.
40

5.2. ANGULAR MOTION 41
Naturally, the physics cannot depend on the coordinate system, and so it must bethat the coordinate systems can easily be related be (transformed into) one another.The relationship is specified in Table5.1.
Cartesian CoordinatesPlane Polar Coordinatesx =| ~ρ | cos | ~θ | | ~ρ |=
√x2 + y2
y =| ~ρ | sin | ~θ | | ~θ |= tan−1 yx
Table 5.1: Transformation rules between Cartesian and Plane Polar Coordinates.
5.2 Angular Motion
In plane polar coordinates, motion is described with angular variables:
Angular displacement:∆~θ ≡ ~θ2 − ~θ1 (5.1)
Angular velocity:
~ω ≡ lim∆t→0
∆~θ
∆t≡ d~θ
dt(5.2)
Angular acceleration:
~α ≡ lim∆t→0
∆~ω
∆t≡ d~ω
dt=
d2~θ
dt2(5.3)
Notice that, in terms of dimensions,∆~θ is dimensionless, while[~ω] = T−1 and[~α] =T−2.
The direction of each vector is determined by a right-hand rule as in Figure1.5,where the fingers follow the direction of the motion in the cases of angular displace-ment and velocity or of change in angular velocity in the case of angular acceleration(if the angular velocity is increasing, then the angular acceleration is in the same direc-tion as the motion; if the angular velocity is decreasing, then the angular accelerationpoints opposite to the motion). Notice, for each variable, the direction isperpendicularto the plane of the motion.
Note that these variables are applicable to both the motion of an object in translationand that of an object rotating on an axis.
5.3 Uniform Angular Motion
Consider an object inuniform angular motion , that is, with constant angular velocity~ω in a circle of constant radius~ρ [see Figure5.2]. The frequency f of the object’smotion is defined as the number of times the particle passes a given point in one unitof time. It is related to the angular velocity by:

42 CHAPTER 5. CURVED TRAJECTORIES IN A PLANE
f =| ~ω |2π
. (5.4)
The dimension of frequency isT−1.
a) b)
x
y
0
(x, y)
(x , y )i i
v
ρ ∆r
θiθ
ρt∆θ = ω∆
x
y
0
ω
Figure 5.2: A particle in uniform circular motion in a) Cartesian and b) plane polarcoordinates.
The period T , the interval of time it takes for the particle to make one completecycle, is the reciprocal of the frequency:
T =1f
=2π
| ~ω |. (5.5)
The dimension of the period is obviouslyT .If, as in Figure5.2 b), the particle starts with an initial angular position~θi, then,
after time interval∆t, the angular position will be
~θ = ~θi + ~ω∆t. (5.6)
Be careful to notice that Equation5.6 holds only for the case of uniform (constant)angular velocity.
It is important to appreciate that, while the angular velocity may be constant, whichmeans that the angular acceleration must be zero, the particle’s rectilinear accelerationcannot be zero; the direction of the motion is changing continuously. We determinethis acceleration by first relating the angular and rectilinear velocities to one another.
Recall from Table5.1,
x =| ~ρ | cos | ~θ | y =| ~ρ | sin | ~θ |.
From Figure5.2, we see that
~θ = ∆~θ + ~θi = ~ω∆t + ~θi.

5.3. UNIFORM ANGULAR MOTION 43
In this case, since the vectors are parallel (as you’ll see shortly),| ~θ |=| ∆~θ + ~θi |=|∆~θ | + | ~θi |=| ~ω | ∆t+ | ~θi |. So,
x = | ~ρ | cos(| ~ω | ∆t+ | ~θi |) =| ~ρ | cos(| ~ω | (t− ti)+ | ~θi |)y = | ~ρ | sin(| ~ω | ∆t+ | ~θi |) =| ~ρ | sin(| ~ω | (t− ti)+ | ~θi |). (5.7)
Recall that the vector~ρ = (x, y), and has magnitude
| ~ρ |=√
x2 + y2,
and direction
tan | ~θ | = tan (| ~ω | ∆t+ | ~θi |) =y
x.
Taking the derivative with respect to time of Equations5.7,
x = − | ~ω || ~ρ | sin (| ~ω | (t− ti)+ | ~θi |) = − | ~ω | yy = | ~ω || ~ρ | cos (| ~ω | (t− ti)+ | ~θi |) = | ~ω | x. (5.8)
Thus, the rectilinear velocity,~v = (x, y), has magnitude
| ~v |=√
x2 + y2 =| ~ω |√
y2 + x2 =| ~ω || ~ρ |, (5.9)
and direction
y
x= −x
y. (5.10)
Notice that the direction of the velocity~v is thenegative reciprocalof the directionof the position vector~ρ. Lines with slopes that are negative reciprocals of one anotherare perpendicular. Therefore, in the case of uniform circular motion, the rectilinearvelocity is always perpendicular to the position vector.
Notice, too, that the magnitude| ~v |=| ~ρ || ~ω | is proportional to both the radiusof the circle and the angular velocity. The magnitude of an object’s rectilinear velocityremains always unchanged if it moves in a circle at constant angular velocity, but twoobjects going circles of different sizes, one large and one small, with the sameangularvelocity have different (though still constant)rectilinear velocities: the rectilinear ve-locity of the object moving in the larger circle isgreaterthan the rectilinear velocity ofthe object going in the smaller circle. An ant on the outer portion of a CD gets a fasterride than an ant near the center of the same CD.
Taking the derivatives now of Equations5.8with respect to time
x = − | ~ω |2| ~ρ | cos (| ~ω | (t− ti)+ | ~θi) = − | ~ω |2 x
y = − | ~ω |2| ~ρ | sin (| ~ω | (t− ti)+ | ~θ |i) = − | ~ω |2 y. (5.11)

44 CHAPTER 5. CURVED TRAJECTORIES IN A PLANE
Now,~a = (x, y) = − | ~ω |2 (x, y), or
~aρ = − | ~ω |2 ~ρ. (5.12)
The acceleration isanti-parallel to the position vector. That is, the acceleration dur-ing uniform circular motion continuously points inward toward the center of the cir-cle. Thisradial acceleration is frequently referred to ascentripetal accelerationandidentified with a subscript, hereρ.
Also, since
ρ =~ρ
| ~ρ |
and, by equation5.9, | ~v |=| ~ω || ~ρ |, equation5.12may be written
~aρ = − | ~ω |2 ~ρ = −| ~v |2
| ~ρ |ρ.
5.4 Angular Motion with Varying Angular Velocity
Recall,
The equation,5.1, for angular displacement:∆~θ ≡ ~θ2 − ~θ1
The equation,5.2, for angular velocity:~ω ≡ d~θdt
The equation,5.3, for angular acceleration:~α ≡ d~ωdt = d2~θ
dt2 .
5.4.1 Uniform Angular Acceleration
The formulas which relate angular displacement, angular velocity, and angular acceler-ation to one another and to changes in time are exactly analogous to those for uniformlyaccelerated rectilinear motion [see Table5.2]. Initial values are indicated with the sub-scripti.
Uniformly Accelerated Rectilinear Motion Uniformly Accelerated Angular Motion~v = ~vi + ~a∆t ~ω = ~ωi + ~α∆t
~v = 12 (~v + ~vi) ~ω = 1
2 (~ω + ~ωi)~r = ~ri + ~vi∆t + 1
2~a(∆t)2 ~θ = ~θi + ~ωi∆t + 12~α(∆t)2
| ~v |2=| ~vi |2 +2~a ·∆~r | ~ω |2=| ~ωi |2 +2~α ·∆~θ
Table 5.2: Kinematic equations for uniformly accelerated rectilinear and angular mo-tion.
Notice, in the last set of equations, the dot product indicates that only the compo-nent of the acceleration (and therefore the force)parallel to the motion changes themagnitudeof the velocity. The component(s) of accelerationperpendicularto the mo-tion change(s) only the motion’sdirection, as we’ll see now.

5.4. ANGULAR MOTION WITH VARYING ANGULAR VELOCITY 45
5.4.2 Circular Motion
When moving in a circle, an object remains at a constant distance| ~ρ | from a fixedaxis of rotation [see Figure5.2]. You know that the circumference of a circle is relatedto the radius of the circle by
C = 2π | ~ρ |,
where, as we discussed above,2π is the total angle measure (in radians) of the circle.Any arc length ∆~r, or portion of the circumference, must be similarly related to theradius and angle∆~θ that subtends it:
| ∆~r |=| ∆~θ || ~ρ | . (5.13)
This relationship allows us to relate rectilinear quantities to angular quantities in circu-lar motion.
If we divide both sides of Equation5.13by the time interval∆t and take the limitas∆t → 0, we get the time derivatives:
lim∆t→0
| ∆~r |∆t
= lim∆t→0
| ∆~θ |∆t
| ~ρ |
| d~r |dt
=| d~θ |dt
| ~ρ |
| ~v | = | ~ω || ~ρ |, (5.14)
where, in this instance,~ρ is constant and so unaffected by the limit.This is a relationship between themagnitudesof rectilinear and angular velocities in
circular motion. Referring to Figure5.2and recalling our convention for the directionof angular variables, we note that each vector in Equation5.14is perpendicular to theother two vectors: in our example,~ω points out of the page,~ρ points to the top-right ofthe page, and~v points to the top left. This kind of relationship should remind you of thevector or cross-product, Equation1.15and Figure1.5. With reference to the right-handrule, we can rewrite Equations5.13and5.14to include both magnitude and direction:
∆~r = ∆~θ × ~ρ (5.15)
~v = ~ω × ~ρ. (5.16)
Similarly, taking the time derivative of Equation5.14or 5.16,
~at = ~α× ~ρ. (5.17)
Notice that we’ve given the subscriptt to the rectilinear acceleration. It’s direction isperpendicular to bothα, which points into the page (if the rotation is slowing down) orout of the page (if it is speeding up), and~ρ, which is radial. That is, this accelerationmust pointtangentto the motion, either parallel or anti-parallel to the velocity.

46 CHAPTER 5. CURVED TRAJECTORIES IN A PLANE
Thus, in circular motion, there are two accelerations: a radial or centripetal accel-eration and a tangential acceleration. The total acceleration is the vector sum of thesetwo [see Figure5.3]:
~a = ~aρ + ~at. (5.18)
Hence, as an object in circular motion changes angular velocity, without changing itsradius of rotation, the acceleration points neither just radially nor just tangentially, butsomewhere between.
r
a
i
tr
aa
v
ρ
Instantaneouscenter ofcurvature
c
ρ
Figure 5.3: General motion in a plane with instantaneous curvature of radius~ρ aroundan axis through c.
5.5 Motion Along a General Plane Curve
Putting all of this together: an object moving through space with position as a functionof time~r = ~r(t) relative to some origin [see Figure5.3, where the origin isnotshown],has
an instantaneous velocity:~v = d~rdt ,
a tangential component of the instantaneous acceleration:~at = d2~rdt2 , and
a radial component of the instantaneous acceleration:~aρ = − | ~ω |2 ~ρ = − |~v|2|~ρ| ρ,
where~ω is the instantaneous angular velocity around an axis through the instantaneouscenter of curvature of radius~ρ, | ~v |=| ~ω × ~ρ |=| ~ω || ~ρ | (because instantaneously, byconstruction,~ω and~ρ are perpendicular), andρ is the unit vector in the direction of~ρ.
These results, along with the vector form of Newton’s Second Law,~Fnet = m~a,imply that the resultant net force has a component parallel or anti-parallel to the radiusof curvature~ρ and one or two components perpendicular to~ρ:
~Fρ = m~aρ~Ft = m~at. (5.19)

5.5. MOTION ALONG A GENERAL PLANE CURVE 47
If ~Fρ > ~0, then the object accelerates toward the center of curvature and bends aroundthe curve.

Chapter 6
Applications of Newton’s Laws
6.1 Relative Motion
Consider two investigators observing the motion of an object. Person 1 measures theobject to be moving at velocity~v1 and person 2 to be moving at velocity~u. Person2 measures the object to be moving at velocity~v2. Galilean or Newtonian relativityrelates these velocities:
~v1 = ~u + ~v2. (6.1)
Note that person 2 measures person 1 to be moving at velocity−~u, so the reverserelationship follows:
~v2 = −~u + ~v1. (6.2)
If person 1 is at rest or in uniform motion relative to an inertial frame of reference–that is, if the reference frame of person 1 is inertial, then, if~u is constant, person 2’sframe of reference is also inertial, and both investigators will measure the same valuefor the object’s acceleration.
6.2 Center of Mass and Systems of Interacting Particles
The center of massCM of an extended object is the position at which the objectresponds to a net external force just as a point particle with the samemass numberwould if it were located at this position:
~Fnet =∑
~Fext = M~aCM , (6.3)
whereM is the mass number of the extended object and~aCM is the acceleration of thecenter of mass.
An extended object can be considered a system of particles, however these maybe distinguished. It is important, when applying Equation6.3 to a complex system,
48

6.3. NORMAL AND FRICTIONAL FORCES 49
to clearly define which particles are in the system and which are outside, because,sometimes, what is called “an object” or a system, has no clear boundary. The massnumber of such a system is the sum of the mass numbers of its constituent particles(mass number, a positive-definite scalar, is simply additive):
M = m1 + m2 + · · ·+ mN =N∑
i=1
mi, (6.4)
where the subscripti indicates theith particle.Each particle is at position~ri. Then the center of mass is defined:
M~rCM ≡ m1~r1 + m2~r2 + · · ·+ mN~rN
or
~rCM ≡ 1M
N∑i=1
mi~ri. (6.5)
The center of gravity of an extended object is the position at which the objectresponds to the force of gravity just as a point particle with the sameweightwould if itwere located at this position. Thus, we can consider the weight of an extended objectas a force acting on the object’s center of gravity and not worry about its effect onindividual constituents. An extended, rigid object can be suspended in any orientationby its center of gravity without tending to rotate. If the gravitational force (the field)is uniform (the same everywhere in the neighborhood), the center of gravity and thecenter of mass coincide.
6.3 Normal and Frictional Forces
An object in contact with another object exerts a force on the second object (and vice-versa) that has a component normal (perpendicular) to the surfaces of contact, the nor-mal force ~N , and a component parallel to the surfaces of contact. The parallel compo-nent is called theforce of friction and is usually symbolized~f , with a subscriptk or s(to be defined shortly) indicating thekindof frictional force involved. Frictional forcesare directed so as to oppose the motion, that is, to oppose the sliding or the tendency toslide of one surface relative to another.
Experiment has shown that the magnitudes of the frictional and normal forces areroughly proportional to one onother. This proportionality is clearest when the surfacesof objects slide against one another. The frictional force in this case is calledkineticfriction , and the relationship between the force of kinetic friction and the normal forceis given approximately by:
| ~fk |= µk | ~N |, (6.6)
where the subscriptk indicates kinetic friction, or the friction associated with slid-ing. µk is thecoefficient of kinetic friction ; its size determines the magnitude of thefrictional force for a given normal force.

50 CHAPTER 6. APPLICATIONS OF NEWTON’S LAWS
When surfaces are at rest relative to one another, the parallel component of the forceis known asstatic friction . Static friction is a “passive” force, like the normal force: inthe presence of an external force also parallel to the surfaces, the force of static frictionvaries in opposition, remaining equal in magnitude and preventing motion. However,should the external force increase to a certain limit beyond which the force of staticfriction cannot exceed, the surfaces will begin to slide relative to one another. Oncethis occurs, the force of kinetic friction is found to remain essentially constant, but atmagnitudelessthan the maximum value static friction reached before giving out.
The magnitude of the force of static friction then varies, depending on the presenceof external forces parallel to the surface, between zero and some maximum found byexperiment to be proportional to the normal force. We may write this as:
| ~fs |≤ µs | ~N |, (6.7)
where the subscripts indicatesstatic friction, andµs is thecoefficient of static fric-tion. It characterizes (dependent on the materials and surface features involved) themaximum magnitude of the static friction between two surfaces resisting motion fromrest. It is typically larger thanµk for the same surfaces in contact.
When one object rolls over another, both surfaces deform at the line or point ofcontact. The rolling therefore is always slightly uphill, and this resisting force is calledrolling friction .
6.4 Elasticity and Hooke’s Law
An elasticobject returns to its original shape and dimensions once a deforming forceceases to exert itself on the object. A deforming force exerts what is calledstressonan object; stress is defined as the ratio of the magnitude of the force to the surface areaof the object over which the force is exerted. It is another name forpressure. Foran approximately one dimensional object (like a string), one can think of stress as atension force/unit length. The result of stress isstrain, which may take three forms:
• Linear strain is the ratio of the change in length of the object to its total length,∆L/L.
• Volume strain is the ratio of the change in volume of the object to its totalvolume,∆V/V .
• Shear is the angular changetan θ ≈ θ in shape of the object from its normalshape.
Hooke’s Law states that, for elastic objects, as long as a deformation remainswithin the object’s so-calledelastic limits (limits of deformation beyond which theobject loses its elastic properities–it stays deformed), the strain is proportional to thestress:
stress= (elastic modulus)(strain),

6.5. UNIFORM CIRCULAR MOTION 51
where an elastic modulus characterizes the degree of proportionality for different ob-jects. For small deformations, elastic moduli are essentially constant.
The elasticity of an object can be attributed to a restoring force, which typicallyis a manifestation of electrostatic repulsion (but this is beyond our discussion here).In any case, the standard model of this is the spring. The ensuing behavior of objectsslightly displaced from equilibrium is well approximated by employing this model, inwhich the strength of the restoring force of the spring is proportional to its contractionor elongation. In one dimension, if a particle with mass numberm is secured to theend of a spring of length and displaced from the equilibrium position by a distance∆`, then
Fres
`= −k
∆`
`Fres = −k∆`, (6.8)
wherek is the elastic modulus of the spring, also known as thespring constant, whichgives the magnitude of the restoring force for one unit of displacement from equilib-rium. The minus sign indicates that the force always points in the direction opposite tothe displacement and toward to the equilibrium position.
6.5 Uniform Circular Motion
Recall that an object with mass numberm moving in a circle of radius| ~ρ | at constantangular velocity~ω accelerates centripetally (radially toward the axis of rotation):
Equation5.12: ~aρ = − | ~ω |2 ~ρ = − |~v|2|~ρ| ρ.
~v = ~ω × ~ρ is the object’s instantaneous rectilinear velocity.By Newton’s Second Law, there must be a net external force acting radially inward
toward the center of the circle:
~Fnet =∑
~Fext = −m | ~ω |2 ~ρ = −m | ~v |2
| ~ρ |ρ. (6.9)
Whatever the source or sources–whether the tension in a string, the elastic force ofa spring, the normal force of the wall of a tube, the force of static friction betweentire and road–forces that collectively or individually induce centripetal acceleration arelabeledcentripetal forces. Forces may act centripetally; but there is no such thing inand of itself asa centripetal force.
6.6 Gravitational Force
We saw earlier that the force of gravity manifests as free fall acceleration~g and weightm~g. Newton proposed aUniversal Law of Gravitation stating that any two particles,

52 CHAPTER 6. APPLICATIONS OF NEWTON’S LAWS
with mass numbers, say,m1 andm2, separated by distance~r, exert an attractive forceon one another:
~FG = −Gm1m2
| ~r |2r, (6.10)
whereG is called the gravitational constant, which is universal, meaning it has thesame value (depending on units) everywhere in the universe. It’s a very small number,indicating the gravitational force is exceedingly weak. But because gravitation is al-ways attractive, and so agglomeration is a striking feature of the universe, gravitationis the force we are most familiar with.
Let us identifym2 with the earth’s mass numberme, m1 with the mass numbermof some object near the earth’s surface, and| ~r | with the radius of the earthre, andthen rewrite Equation6.10in the familiar form of Newton’s Second Law:
| ~FG |= Gmme
r2e
= m | ~a |,
| ~a |= Gme
r2e
.
But we symbolize the acceleration due to gravity as~g, and so we get:
| ~g |≡ Gme
r2e
. (6.11)
In this form,~g is also known as thefield intensity at a distancere from the centerof the earth, which is the source of a gravitational field associated with its inertia.A spherically symmetric distribution of matter gives rise to a gravitational field thataffects other objects outside this distribution just as if all the matter were concentratedat the position of its center. Thus, for many typical purposes, we can treat the sun,earth, moon, etc., as point objects and not be concerned that they are in fact extendedobjects.

Chapter 7
Momentum
7.1 Linear Momentum
An object with mass numberm moving with rectilinear velocity~v is said to havemo-mentum
~p ≡ m~v, (7.1)
which is obviously a vector quantity with direction the same as the velocity. Its dimen-sions areMLT−1.
Since~a = d~vdt , Newton’s Second Law may be rewritten
~Fnet =∑
~Fext =d~p
dt, (7.2)
which is actually closer to the way Newton himself stated the law. As such, Equa-tion 7.2 is more general than Equation4.1, ~Fnet = m~a. This latter follows from theformer in case the mass of the system is a constant, but it need not be. This more gen-eral form of the Second Law states that the effect of a net external force on an object isto change itsmomentum, whether this be its velocity or its mass or both.
The total momentum~ptot of a system of particles is the vector sum of each particle’smomentum vector:
~ptot = ~p1 + ~p2 + · · ·+ ~pN = M~vCM , (7.3)
a result that follows directly from taking the time derivative of the definition of centerof mass, Equation6.3. Newton’s Second Law for this system becomes
~Fnet =∑
~Fext =d~ptot
dt. (7.4)
7.2 Impulse
Multiplying both sides of Equation7.2by dt and integrating,
53

54 CHAPTER 7. MOMENTUM
∫ t
ti
~Fnet(t′)dt′ =∫ ~p
~pi
d~p′,
or∫ t
ti
~Fnet(t′)dt′ = ~p− ~pi = ∆~p, (7.5)
where the′ indicates a dummy variable to be integrated over. This result says that thetime-integrated net force is numerically equal to the change in the momentum. Thistime-integrated force is known as theimpulse.
We may replace a time-varying force~F (t) by it’s time-averaged value~F (that is,by some constant force equal to the average force acting during the time interal underconsideration): ∫ t
ti
~Fnet(t′)dt′ = ~Fnet∆t = ∆~p. (7.6)
Measuring the momentum change that occurs in an interaction and its duration permitsus to say something about the average force of the interaction, even if we can’t describeit in complete detail.
7.3 Conservation of Linear Momentum
Obviously, from Equation7.4, if ~Fnet =∑ ~Fext = ~0, then d~p
dt = ~0. That is, in theabsence of a net external force, the momentum remains constant in time. This is astatement of theLaw of Conservation of Linear Momentum. It implies that for anysystem closed to external influence~ptot = ~ptot i, even if the momenta of individualconstituents of the system change.

Chapter 8
Introduction to EnergyConcepts
8.1 Work and Kinetic Energy
A net external force acting on an object changes its motion: this from Newton’s Firstand Second Laws. A component of the net force in the direction of the object’s dis-placement changes the magnitude of the object’s velocity but not its direction; compo-nents perpendicular to the object’s displacement change its direction but not its magni-tude. The general result, then, of a net external force is to change both magnitude anddirection of an object’s velocity.
The product of an object’s mass number, a scalar, and its velocity, a vector, is avector called momentum,~p = m~v. A net external force acting on the object for someinterval of time changes its momentum, both magnitude and direction:
Equation7.5:∫ t
ti
~Fnet(t′)dt′ = ∆~p,
and we say that this change in momentum is equal to the integrated force as a functionof time, or impulse.
If, rather, we concern ourselves only with the magnitude of the velocity change, wemay begin with the squared velocity, as given in the kinematic equation:
Equation3.9: | ~v |2=| ~vi |2 +2~a ·∆~r.
Since~a = ~Fnet/m by Newton’s Second Law, we can rearrange things:
~Fnet ·∆~r =12m(| ~v |2 − | ~vi |2).
Since∆~r =∫ ~r
~rid~r′, ∫ ~r
~ri
~Fnet · d~r′ =12m(| ~v |2 − | ~vi |2). (8.1)
55

56 CHAPTER 8. INTRODUCTION TO ENERGY CONCEPTS
The left-hand side of Equation8.1is known aswork . We say that the net force~Fnet
does work on an object with mass numberm as it moves from position~ri to position~r. Work is a scalar quantity (the result of a dot or scalar product) and has dimensionML2T−2. It is given the symbolW~ri~r.
Since, obviously,W =∫
dW andd~r = dxi + dyj + dzk, we can write, for thedifferential work :
dW =| ~Fnet || d~r | cos θ = Fxdx + Fydy + Fzdz, (8.2)
whereθ is the angle between the net force vector and the displacement vector.The right-hand side of Equation8.1 has the form1
2m | ~v2 |, which is called thekinetic energy and given the symbolK. Note that it has, as it must, the same di-mensions as workML2T−2. The right-hand side of8.1 may therefore be rewrittenas 1
2m(| ~v |2 − | ~vi |2) = K − Ki = ∆K. This leads to what is known as theWork-Kinetic Energy Principle :
W~ri~r = ∆K, (8.3)
The work done by a net force acting on an object is numerically equal to the change inthe object’s kinetic energy.
8.1.1 An Example
Consider an object with mass numberm attached to the end of a spring with springconstantk. The spring and object lie on a smooth, horizontal surface. Let the positionof the object when the spring is in its relaxed configuration be labeledx0, and say theobject is displaced from this position to positionxi. The object is then released fromrest. We ask for the object’s kinetic energy at some positionx. Using the definition ofWork and Work-Kinetic Energy Principle, Equation8.3,
Wxix =∫ x−x0
xi−x0
−k∆` d(∆`)
= −12k(∆`)2
∣∣∣x−x0
xi−x0
= −12k(x− x0)2 +
12k(xi − x0)2 =
12m | ~v |2,
since~vi = ~0. Experience shows that|x− x0| ≤ |xi − x0|, so that the left-hand side ofthis equation is always positive or zero, as the right-hand side must be.
8.2 Power
Power is the instantaneous rate at which work is done:
P ≡ dW
dt= ~Fnet ·
d~r
dt= ~Fnet ·~v =| ~Fnet || ~v | cos θ = Fx
dx
dt+Fy
dy
dt+Fz
dz
dt, (8.4)

8.2. POWER 57
whereθ is the angle between the instantaneous net force~Fnet and the instantaneousvelocity~v.
If the force is constant, thenP = W/∆t.The dimensions of power areML2T−3.

Chapter 9
Potential Energy and EnergyConservation
9.1 Potential Energy
Suppose we lift at constant velocity an object with mass numberm straight up fromthe floor to a heighth. Because the velocity isn’t changing, the acceleration is zero.Consequently, the net force, which is the vector sum of our lifting~P , say, and theweightm~g, is zero, as well. Yet, we certainly feel like we do something.
Now, if, after raising the object to heighth, we release it from rest, it acceleratesdownward, attaining a velocity of
| ~v |2 = | ~vi |2 +2~a ·∆~r
| ~v |2 = 2(− | ~g |)(−h)
| ~v | =√
2 | ~g | h
just as it reaches the floor. We used here Equation2.14.The net force after the release is~Fnet = m~g, so the work done by gravity on the
way down is
WGh 0 =
∫ 0
h
m~g · d~r = m | ~g | h =12m | ~v |2 .
You see, we can get| ~v |=√
2 | ~g | h this way, too.The object achieved this velocity, or kinetic energy, after we lifted it up and let it
drop; we first “worked against the force of gravity.” You might say our lifting providedthe potential for the object, once released from the end-point of the lift, to gain thismuch kinetic energy.
Suppose we fix one end of a spring with spring constantk and attach an object withmass numberm to its other end. If we then pull the object horizontally at constant
58

9.1. POTENTIAL ENERGY 59
velocity along a frictionless surface, displacing it∆`i, we also stretch the spring∆`i
from its equilibrium configuration (that is, neither stretched nor compressed). Becausethe velocity isn’t changing, the acceleration is zero. Consequently, the net force, whichis the vector sum of our pull~P , say, and the elastic force (Hooke’s Law)−k∆`i, iszero, as well. Yet, we certainly feel like we do something.
Now, if, after stretching the spring∆`i, we release the object from rest, it acceler-ates back toward its equilibrium position. We cannot use Equation2.14to determinethe velocity in this case, because the acceleration is not constant, as it is in the case offree fall near the earth’s surface. We saw in the example of the last chapter,
W∆`i ∆` =∫ ∆`
∆`i
−k∆`′d(∆`′) = −12k(∆`)2 +
12k(∆`i)2 =
12m | ~v |2,
where∆` is the object’s later displacement from its position when the spring is relaxed.
Thus| ~v |=√
km [(∆`i)2 − (∆`)2] In this way, we can determine the velocity at any
displacement from equilibrium∆`.But the object only attains a velocity if it is displaced from its equilibrium position.
By “working against the spring,” stretching (or compressing) it, provides the object,like the one we lift, with thepotentialto attain some kinetic energy.
Notice in these cases, lifting against gravity and stretching a spring, that a displace-ment was necessary to provide the potential for kinetic energy. The potential for kineticenergy due to interaction with a force whose magnitude depends only on position isknown, naturally enough, aspotential energy. The force involved in the interactionis known as aconservative force. Note that, in both our examples, the route from theinitial to final positions makes no difference:for conservative forces, the work is inde-pendent of the path joining the endpoints. So, the work is zero for a closed loop. Workdone by a non-conservative force (friction, for example) does depend on the route.
In more formal mathematical terms, a conservative force is defined as any forcethat can be dervied from a function of positionU(~r), the potential energy, by takingthe gradient, or spatial derivative, of this function:
~F = −~∇U(~r),
where~∇ ≡ ∂∂x i + ∂
∂y j + ∂∂z k and ∂
∂x , etc., are partial derivatives. In this course, wewill concern outselves only with potential functions in 1-dimension, so we can definea conserved force:
Fs ≡ −dU
ds, (9.1)
whereFs is the component of the force in the direction ofds, the infinitesimal displace-ment from the point of observation. That is, a conservative force is derived by takingthe negative derivative with respect to position of the potential energy. Therefore,
dU = −~F · d~r, (9.2)
so thatdW = −dU . Thus,

60 CHAPTER 9. POTENTIAL ENERGY AND ENERGY CONSERVATION
W~ri~r =∫ ~r
~ri
~F · d~r′ =∫ s
si
Fs′ds′ =∫ s
si
−dU
ds′ds′ = −(Us − Usi
) = −∆U. (9.3)
Thus, positive (negative) work, which increases (decreases) kinetic energy, can alsodecrease (increase) potential energy. Remember, when the force and the displacementare in the same direction, the work is positive; when they are in opposite directions, thework is negative. When we lift the ball, the gravitational force is doing negative work,thus increasing the object’s potential energy. One might expect the kinetic energy to de-crease accordingly, but our lifting is doing positive work, which would increase kineticenergy, and the net change in kinetic energy is zero. The potential energy increasesthough because our lifting is not a conservative force (it doesn’t depend simply on po-sition). Gravity is the only conservative force in this interaction, and its (negative) workchanges the potential energy. When the object is released to fall freely, the gravitationalforce does positive work increasing kinetic energy and decreasing potential energy. Asimilar analysis can be made of the spring stretching.
9.2 Conservation of Mechanical Energy
As long as only conservative forces are involved, then, whenever the kinetic energyincreases the potential energy decreases, and vice-versa. This is a statement of theLaw of Conservation of Mechanical Energy:
∆K + ∆U = 0. (9.4)
This is a special case of a more generalLaw of Conservation of Energy. If weidentify the work done by non-conservative forcesW ′, then
∆K + ∆U = W ′. (9.5)
In the lifting example above, the kinetic energy was unchanged during the lift, andthe potential energy, increasing against the work of gravity, equals the work done byour lift.

Chapter 10
Torque and Equilibrium
10.1 Rigid Bodies
An object is called arigid body if the separation between any two constituents of theobject is constant. In such a case, the object’s center of mass,~rCM = (xCM , yCM , zCM ),found with Equation6.5, remains fixed with respect to the object. For real three-dimensional objects, usually the easiest approach to finding the center of mass is todetermine components individually:
xCM =∑
mixi∑mi
yCM =∑
miyi∑mi
zCM =∑
mizi∑mi
. (10.1)
Again, real objects are typically continuous (the constituents are not so easy toisolate), so the sums go over to integrals:
xCM =∫
x dm∫dm
yCM =∫
y dm∫dm
zCM =∫
z dm∫dm
. (10.2)
10.2 Torque
You will recall the analogy between rectilinear and rotational kinematic equations [seeTable5.2]. The analogy carries over into dynamics, as well. Corresponding toforcein rectilinear dynamics istorque in rotational dynamics. Just as a net rectilinear forceresults in a rectilinear acceleration, a net torque results in angular acceleration.
Torque measures the effectiveness of a force to change an object’s rotation. Expe-rience shows that the magnitude of this rotational acceleration depends on the force’smagnitude, the angle at which it is exerted, and the distance of the point of applicationfrom the axis of rotation. All other things being equal, the greater the force the greaterthe torque. A given force is maximally effective when its direction is perpendicular tothe radial line directed from the axis of rotation to the point of application. The fartheralong this line a force is applied, at any angle other than parallel to the line, the greaterthe resulting angular acceleration. The first and third relationships imply that torque
61

62 CHAPTER 10. TORQUE AND EQUILIBRIUM
is proportional to the magnitude of the force| ~F | and to the distance from the axisof rotation | ~r |. The angular dependence behaves like a sine function, maximal atπ2 and minimal at0. We might, as we’re at it, assign a direction to the torque: usingthe right-hand rule [see Figure1.5], if the fingers curl in the direction of the result-ing angular acceleration (not necessarily the motion, because a torque may slow downexisting rotation), then the thumb gives the torque’s direction. This all sounds like across-product:
| ~τ |≡| ~r × ~F |=| ~r || ~F | sin θ, (10.3)
whereθ is the angle between the radial line from the axis of rotation to the applicationpoint and the direction of the force.
Simple Example: We’ll compute the torque about a fixed point0 on an object withmass numberM induced by the gravitational force (weight), assumed to be uniformover the entire volume of the object.
Imagine that the object is an assembly of constituents each with infinitesimal massnumberdm, so that each constituent experience the gravitational force as weight~g dm.The differential torque, then, is~r × ~gdm, where~r is the position of the constituentrelative to the fixed point0. To determine the torque, we sum the differential torquesof each constituent:
~τ =∫
~r × ~g dm =(∫
~rdm
)× ~g = M~rCM × ~g = ~rCM ×M~g.
The torque about a given point on an extended object due to the gravitational force isthe object’s weight acting at the object’s center of mass.
10.3 Equilibrium
A rigid body is inequilibrium if a) its center of mass is moving uniformly(~aCM = ~0)and b) it is not rotating. This definition implies two general (six specific) conditions:
1.∑ ~Fext = ~0, or, equivalently,Fx net = Fy net = Fz net = 0, and
2.∑
~τext = ~0, or, equivalently,τx net = τy net = τz net = 0.
When solving statics problems, it is most convenient, if possible, to arrange thereference frame so that all forces are coplanar. Then general condition 1 reduces to twospecific conditions (forces in the plane chosen) and general condition 2 reduces to onespecific condition (torques perpendicular to the chosen plane).

Chapter 11
Rigid Body Motion
11.1 Rotational Inertia
Just as the magnitude of an object’s rectilinear acceleration is proportional to the mag-nitude of the net external force exerted on the object, so too is the magnitude of anobject’s angular acceleration proportional to the net external torque exerted on the ob-ject. [The direction of the rectilinear acceleration is the same as that of the force; thedirection of the angular acceleration is the same as that of the torque.] For rectilineardynamics, the proportionality constant is the object’s inertia, measured typically as amass number,m. The quantity in rotational dynamics analogous to inertia isrotationalinertia , which is normally quantified as amoment of inertia, I. [Note that this is ascalar, to be differentiated from the vector impulse,~I.]
Rotational inertia depends on both the inertia and the shape of the object. If anobject is composed of a number of discrete constituents, each with its own mass numberm1, m2,. . . ,mN , and located respective distancesr1, r2,. . . ,rN , from a given axis ofrotation, then the object’s moment of inertia about a this axis is
I =N∑
i=1
mir2i = m1r
21 + m2r
22 + · · ·+ mNr2
N . (11.1)
For an object whose constituents are continuously distributed and exceedingly nu-merous, the sum of Equation11.1goes over to an integral:
I =∫
V
r2 dm, (11.2)
whereV indicates an integration over the entire volume of the object.Obviously, the dimensions of moment of inertia areML2.
11.1.1 Radius of Gyration
For some applications, expressing the rotational inertia in terms of a single length,called theradius of gyration, is convenient. The standard symbol for radius of gyra-
63

64 CHAPTER 11. RIGID BODY MOTION
tion isk, and it’s defined by:
k =
√I
M, (11.3)
whereM is the mass number of a particle with a moment of inertia equal to the ex-tended body under consideration. In other words, ifI is the moment of inertia aroundan axis of an object with mass numberM , then there is some lengthk, such thatI = Mk2, which is the moment of inertia of a particle with mass numberM rotating adistancek around the same axis. Thisk is the radius of gyration.
11.1.2 Theorems on Moments of Inertia
Decomposition Theorem: A extended object composed of multiple parts, each withmoment of inertiaI1, I2,. . . ,IN , has a moment of inertia
I =N∑
i=1
Ii = I1 + I2 + · · ·+ IN . (11.4)
Parallel-axis Theorem: If the moment of inertia about an axis through an object’scenter of mass isICM , then the moment of inertia about an axis parallel to, but dis-placed a distances from, the axis through the center of mass is
I = ICM + ms2, (11.5)
wherem is the object’s mass number.
Perpendicular-axis Theorem: Consider a flat object lying in thexy-plane. Assumethe mutually perpendicular components of the object’s moment of inertia about axesparallel to the reference lines (two of which lie in thexy-plane) areIx, Iy, andIz.Then these components are related by:
Iz = Ix + Iy. (11.6)
11.2 Angular Dynamics
There is a rotational analogue to Newton’s Second Law for rectilinear motion,∑ ~Fext =
m~a. For a rigid body rotating about an axis fixed in direction through the body’s centerof mass, or an axis fixed in an inertial frame,∑
~τext = I~α, (11.7)
where~τext, the vector sum of the torques arising from external forces acting on thebody, I, the body’s moment of inertia, and~α, the body’s angular acceleration, areall determined about the given axis. As in the rectilinear case, the rotational form ofNewton’s Second Law necessarily holds only in an inertial frame. If a thin rod, for

11.3. KINETIC ENERGY 65
example, is held horizontally with respect to the ground and released so as to maintainits horizontal orientation, there is no rotation~α = ~0, relative to an end of the rod eventhough there exists a torque, due to the gravitational force, acting on the center of mass,~τext 6= ~0. Notice, though, that if the axis through the center of mass, instead of throughan end, of the rod were chosen,~τext = ~α = ~0.
11.3 Kinetic Energy
In analogy with the rectilinear form, the kinetic energy of a rigid body rotating about afixed axis is
Krot =12I | ~ω |2, (11.8)
whereI is the body’s moment of inertia and~ω is its angular velocity, both of which arecalculated relative to the fixed axis.
Energy is a scalar, so the total energy of any system is the algebraic sum of thevarious forms of energy found in the system. The total kinetic energy of a rigid bodyin motion, in particular, is the sum of the kinetic energy associated with the rectilinearmotion of its center of mass, known astranslational kinetic energy Ktran, and thekinetic energy associated with its rotation about the center of massKrot. If a rigidbody moves rectilinearly in a plane perpendicular to the axis through its center of massabout which it simultaneously rotates, then the total kinetic energy takes a particularlysimple form:
Ktot = Ktran + Krot =12m | ~v |2CM +
12ICM | ~ω |2 .
11.3.1 Instantaneous Rotational Power
If a rigid body experiences a net external force that is exerted through an angle aboutthe axis of rotation, then theinstantaneous rotational power, rate at which work isdone by the net external torque on the the body is given by
Prot = ~τext · ~ω. (11.9)

Chapter 12
Angular Momentum
12.1 Angular Momentum
Recall that, in rectilinear motion, the momentum~p = m~v. We should expect that, ifthe analogies continue, to find a rotational, orangular momentum,
~L = I~ω. (12.1)
In fact, Equation12.1holds only when the direction of~L is constrained to be parallelto the direction of~ω, which is not usually the case.
To arrive at the general form of angular momentum, we recall Equation7.2, ~Fnet =d~pdt , and Equation10.3, ~τ = ~r × ~F . Considering that a net force changes linear mo-mentum, we should expect that a net torque changes angular momentum:
~τnet =d~L
dt. (12.2)
Since
~τnet = ~r × ~Fnet = ~r × d~p
dt,
and so
~L = ~r × ~p = ~r ×m~v, (12.3)
for a single particle at position~r relative to a chosen origin, and~p is the particle’s linearmomentum,m its mass number, and~v its velocity.1 For an extended object,
~L =∫
~r × ~v dm. (12.4)
Equation12.2 expresses theprincipal of angular momentum, which might bethought of as Newton’s Second Law for angular motion. Note that the torque and
1Note that~r = ~v and~v × ~v = ~0.
66

12.2. CONSERVATION OF ANGULAR MOMENTUM 67
angular momentum must be measured relative to the same origin. The principal holdsif this origin is either the center of mass or a fixed point in an inertial reference frame.
The dimensions of angular momentum areML2T−1.
12.2 Conservation of Angular Momentum
Equation12.2allows us to state a conservation law for angular momentum: if~τnet = ~0,the total momentum of the system~Ltot is constant.

Chapter 13
Harmonic Motion
13.1 Simple Harmonic Motion
Consider an object with mass numberm in equilibrium at positions0. If the object isdisplaced slightly to positionsi and released, it tends to accelerate back in the directionof equilibrium. We can model such behavior with a system of a particle with massnumberm attached to a fixed spring. A restoring force, given by Equation6.8, Fres =−k∆s, wherek is the spring constant and∆s = s − s0, thus acts on the object andinstigates oscillatory behavior abouts0, the equilibrium position of the particle at thefree end of the spring. Such motion is known assimple harmonic motion.
Newton’s Second Law,~Fnet = m~a, in this case takes the form
ms = −k∆s.
If we arrange reference frame so thats0 is at the origin, the equation becomes
ms = −ks.
Rearranging this equation and defining| ~ω |≡√
km , the so-callednatural frequency,
we get theequation of motion of a particle with mass numberm undergoing simpleharmonic motion at the end of a spring with spring constantk:
s = − | ~ω |2 s. (13.1)
Since simple harmonic motion continuously retraces its trajectory, it is very similarto uniform circular motion, in which the rate at which the motion occurs is given by~ω, the angular velocity. In fact, the solution of the second-order differential equation,Eq.13.1, gives the position of the oscillating particle as a sinusoidal function of time:
s = S cos (| ~ω | t + δ), (13.2)
whereS is called theamplitude, or maximum displacement, andδ ≡ − | ~ω | ti isthe so-calledphase constant, or location in the repeated cycle at the instant designated
68

13.2. DAMPED HARMONIC MOTION 69
t = 0: s = S cos (− | ~ω | ti) = S cos δ. Note that in the case of a spring oscillator,theangular velocity is determined by characteristics of the system: the square root of thespring-constant-to-mass-number ratio.
As with uniform circular motion, we can define a period of the oscillation
T ≡ 2π
| ~ω |= 2π
√m
k,
and its frequency
f =1T
=| ~ω |2π
=12π
√k
m.
13.2 Damped Harmonic Motion
Of course, in real life, macroscopic oscillators are subject to resistive forces whichprogressively degrade, ordamp, the amplitude. The equation of motion can be written:
s = − | ~ω |2 s− b
ms, (13.3)
whereb is a positive scalar called thedamping factor. The negative sign in front of thisterm, which multiplies the object’s velocity, indicates that the damping alwaysopposesthe motion. The angular velocity~ω in this case, too, is that of theundampedoscillator.
Equation13.3has a solution (as you can check by substitution)
s = e−b
2m t
(Ae
√( b
2m )2−|~ω|2 t + Be−√
( b2m )2−|~ω|2 t
),
whereA andB are constants determined from initial conditions. The initial exponen-tial ensures that the amplitude of the motion decreases exponentially with time, dyingout ast →∞.
The details of the motion depend on the magnitude ofb and the direction and mag-nitude of the initial velocitysi. If b < 2m | ~ω |= 2
√mk, the exponential sum in
the parenthesis becomes a sinusoidal function with| ~ωd |=√| ~ω |2 −
(b
2m
)2, the
frequency of damped oscillations which asymptotically approach zero amplitude. If,however,b ≥ 2
√mk, no oscillations occur, and the exact trajectory depends onsi;
b = 2√
mk is known as thecritical damping value.
13.3 Simple Pendulum
Consider a simple pendulum, say, a small ball with mass numberm at the end of alight string of length . Two forces act on the ball, the tension in the string~T and theweight ~W = m~g. As there is no acceleration along the line of the string, we may writema‖ = 0, or, if θ is the angle of the pendulum from vertical,| ~T |= m | ~g | cos θ.However, there is acceleration in the direction perpendicular to the string:

70 CHAPTER 13. HARMONIC MOTION
ma⊥ = ms = −m | ~g | sin θ,
or, sincea⊥ = `θ,m`θ = −m | ~g | sin θ.
But if θ remains very small, thensin θ ≈ θ, and this last equation becomes
θ = −| ~g |`
θ, (13.4)
which has exactly the same form as Equation13.1, but with | ~ω |=√
|~g|` instead of
| ~ω |=√
km . Thus, a simple pendulum sent into motion with a small initial amplitude
will behave like a simple harmonic oscillator with periodT = 2π√
`|~g| .